Базис. Координаты вектора в базисе
Определим
понятие базиса на прямой, плоскости и
в пространстве.
Базисом
на прямойназывается любой ненулевой
вектор![]() на этой прямой. Любой другой вектор
на этой прямой. Любой другой вектор![]() ,
,
коллинеарный данной прямой, может быть
выражен через вектор![]() в виде
в виде![]() .
.
Базисом
на плоскостиназываются любых два
линейно независимых вектора![]() и
и![]() этой плоскости, взятые в определенном
этой плоскости, взятые в определенном
порядке. Любой третий вектор![]() ,
,
компланарный плоскости, на которой
выбран базис![]() ,
,
может быть представлен в виде![]() .
.
Базисом
в трехмерном пространстве называются
любые три некомпланарных вектора
![]() ,
,
взятые в определенном порядке. Такой
базис обозначается![]() .
.
Пусть![]() ‑ произвольный вектор трехмерного
‑ произвольный вектор трехмерного
пространства, в котором выбран базис![]() .
.
Тогда существуют числа![]() такие, что:
такие, что:
|
|
(4.5) |
Коэффициенты
![]() называются координатами вектора
называются координатами вектора![]() в базисе
в базисе![]() ,
,
а формула (4.5) есть разложение вектора![]() по данному базису.
по данному базису.
Координаты
вектора в заданном базисе определяются
однозначно. Введение координат для
векторов позволяет сводить различные
соотношения между векторами к числовым
соотношениям между их координатами.
Координаты линейной комбинации векторов
равны таким же линейным комбинациям
соответствующих координат этих векторов.
Декартовы прямоугольные координаты в пространстве. Координаты точек. Координаты векторов. Деление отрезка в данном отношении
Д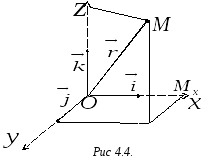 екартова
екартова
прямоугольная система координат в
пространстве определяется заданием
единицы масштаба для измерения длин и
трех пересекающихся в точке взаимно
перпендикулярных осей, первая из которых
называется осью абсцисс![]() ,
,
вторая – осью ординат![]() ,
,
третья – осью аппликат![]() ;
;
точка![]() ‑ начало координат (Рис. 4.4).
‑ начало координат (Рис. 4.4).

Положение
координатных осей можно задать с помощью
единичных векторов
![]() ,
,
направленных соответственно по осям![]() .
.
Векторы![]() называются основными или базисными
называются основными или базисными
ортами и определяют базис![]() в трехмерном пространстве.
в трехмерном пространстве.
Пусть
в пространстве дана точка
![]() .
.
Проектируя ее на ось![]() ,
,
получим точку![]() .
.
Первой координатой![]() илиабсциссой точки
илиабсциссой точки
![]() называется длина вектора
называется длина вектора![]() ,
,
взятая со знаком плюс, если![]() направлен
направлен
в ту же сторону, что и вектор![]() ,
,
и со знаком минус ‑ если в противоположную.
Аналогично проектируя точку![]() на оси
на оси![]() и
и![]() ,
,
определим ееординату
![]() иаппликату
иаппликату
![]() .Тройка чисел
.Тройка чисел![]() взаимно однозначно соответствует точке
взаимно однозначно соответствует точке![]() .
.
Система
координат называется правой, если
вращение от оси![]() к оси
к оси![]() в ближайшую сторону видно с положительного
в ближайшую сторону видно с положительного
направления оси![]() совершающимися против часовой стрелки,
совершающимися против часовой стрелки,
илевой, если вращение от оси![]() к оси
к оси![]() в ближайшую сторону видно совершающимися
в ближайшую сторону видно совершающимися
по часовой стрелке.
Вектор
![]() ,
,
направленный из начала координат в
точку![]() называетсярадиус-вектором точки
называетсярадиус-вектором точки
![]() ,
,
т.е.:
|
|
(4.6) |
Если
даны координаты точек
![]() и
и![]() ,
,
то координаты вектора![]() получаются вычитанием из координат его
получаются вычитанием из координат его
конца![]() координат начала
координат начала![]() :
:![]() или
или![]() .
.
Следовательно,
по формуле (4.5):
|
|
(4.7) |
При
сложении (вычитании) векторов их
координаты складываются (вычитаются),
при умножении вектора на число все его
координаты умножаются на это число.
Длина
вектора
![]() равна квадратному корню из суммы
равна квадратному корню из суммы
квадратов его координат.
|
|
(4.8) |
 .
.Длина
вектора
![]() ,заданного координатами своих концов,
,заданного координатами своих концов,
т.е. расстояние между точками
![]() и
и
![]() вычисляется по формуле:
вычисляется по формуле:
|
|
(4.9) |
 .
.Если
![]() и
и![]() коллинеарны, то они отличаются друг от
коллинеарны, то они отличаются друг от
друга скалярным множителем. Следовательно,
у коллинеарных векторов координаты
пропорциональны:
|
|
(4.10) |
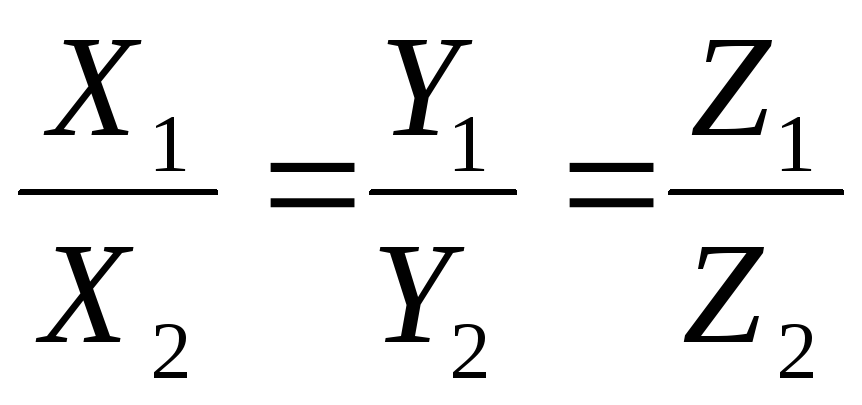 .
.Пусть
точка
![]() делит отрезок между точками
делит отрезок между точками![]() и
и![]() в отношении
в отношении![]() ,
,
тогда радиус-вектор точки![]() выражается через радиусы-векторы
выражается через радиусы-векторы![]() и
и![]() его концов по формуле:
его концов по формуле: .
.
Отсюда
получаются координатные формулы:
 .
.
В
частности, если точка
![]() делит отрезок
делит отрезок![]() пополам, то
пополам, то![]() и
и ,
,
т.е. .
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
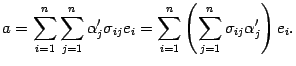
Разложение векторов по векторам базиса
Краткая теория
Вектор
называется линейной комбинацией векторов
векторного пространства
,
если он равен сумме произведений этих векторов на произвольные действительные
числа:
где
– какие угодно действительные числа
Векторы
векторного пространства
называются линейно зависимыми, если существуют
такие числа
,
не равные одновременно нулю, что
В противном случае векторы
называются линейно независимыми.
Из приведенных выше определений следует, что векторы
линейно независимы, если последнее равенство
справедливо лишь при
,
и линейно зависимы, если равенство выполняется, когда хотя бы одно из чисел
отлично от нуля.
Можно показать, что если векторы
линейно зависимы, то
по крайней мере один из них линейно выражается через все остальные. Верно и
обратное утверждение о том, что если один из векторов выражается через
остальные, что все эти векторы в совокупности линейно зависимые.
Примеров линейно независимых векторов являются два неколлениарных на плоскости или три некомпланарных в
трехмерном пространстве, т.е. определитель, составленный из координат этих
векторов должен быть не равен нулю.
Пример решения задачи
Задача
Даны векторы
и
в
некотором базисе. Показать, что векторы
образуют
базис, и найти координаты вектора
в
этом базисе.
Решение
На сайте можно заказать решение контрольной или самостоятельной работы, домашнего задания, отдельных задач. Для этого вам нужно только связаться со мной:
ВКонтакте
WhatsApp
Telegram
Мгновенная связь в любое время и на любом этапе заказа. Общение без посредников. Удобная и быстрая оплата переводом на карту СберБанка. Опыт работы более 25 лет.
Подробное решение в электронном виде (docx, pdf) получите точно в срок или раньше.
Составим из координат векторов определитель и
вычислим его:
Определитель не равен нулю, следовательно, система
векторов является линейно-независимой и образует базис трехмерного
пространства.
Вектор
единственным образом разлагается по векторам
этого базиса.
Приравнивая соответствующие координаты векторов,
получаем следующую систему 3-х линейных уравнений:
Решим систему уравнений
методом Крамера:
Ответ:
Координаты вектора
в базисе векторов
или
Как найти координаты вектора в базисе
Решение:
Записываем матрицу перехода А:
и находим ее определитель
<>0
Видим, что ранг матрицы С равен трем. Из теоремы о базисном миноре векторы f1 , f2 , f3 линейно независимы, а поэтому могут быть приняты в качестве базиса пространства R 3 .
Находим обратную матрицу А -1 .
Транспонированная матрица:
Обратная матрица А -1
Находим координаты вектора х относительно нового базиса.
Пример №1 . Даны векторы a<1;2;1>, b<2;-2;1>, c <1;-2;0>и d <0;3;1>. Установить, что векторы a , b , c образуют базис, и найти координаты вектора d в этом базисе.
Решение:
Соотношение, записанное для векторов d = αa + βb + γc, справедливо для каждой из проекций:
α*1 + β*2 + γ*1 = 0
α*2 — β*2 — γ*2 = 3
α*1 + β*1 + γ0 = 1 т.е. получена алгебраическая система трёх уравнений с тремя неизвестными. Решение системы удобнее вычислять методом Крамера или методом обратной матрицы:
α = 1/2; β = 1/2; γ = -3/2
следовательно, и вектор d имеет разложение в базисе a, b, c :
d = 1/2a + 1/2b — 3/2c
Пример №2 . Даны векторы  . Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
. Показать, что векторы образуют базис трехмерного пространства и найти координаты вектора в этом базисе:
Пример №3 . Даны два линейных преобразования:
х’1 = a11x1 + a12x2 + a13x3, х»1 = b11x’1 + b12x’2 + b13x’3,
х’2 = a21x1 + a22x2 + a23x3, х»2 = b21x’1 + b22x’2 + b23x’3,
х’3 = a31x1 + a32x2 + a33x3, х»3 = b31x’1 + b32x’2 + b33x’3,
Средствами матричного исчисления найти преобразование, выражающее х»1, x»2, x»3 через х1, х2, х3.
х’1 = 4x1 + 3x2 + 5x3, х»1 = — x’1 + 3x’2 — 2x’3,
х’2 = 6x1 + 7x2 + x3, х»2 = — 4x’1 + x’2 + 2x’3,
х’3 = 9x1 + x2 + 8x3, х»3 = 3x’1 — 4x’2 + 5x’3,
Решение. Используя калькулятор, получаем:
Обозначим:
Тогда матричное уравнение запишется в виде: A·X = B.
Вычислим определитель матрицы А:
∆ = 4*(7*8 — 1*1) — 6*(3*8 — 1*5) + 9*(3*1 — 7*5) = -182
Определитель матрицы А равен detA=-182
Так как A невырожденная матрица, то существует обратная матрица A -1 . Умножим слева обе части уравнения на A -1 : A -1 ·A·X = A -1 ·B, тогда получим E·X = A -1 ·B, или X = A -1 ·B.
Найдем обратную матрицу A -1 .
| A -1 = -1/182 |
|
Матрицу Х ищем по формуле:
| X = A -1 ·B = -1/182 |
|
* | = |
|
Пример №4 . В декартовой прямой системе координат даны вершины пирамиды A(3,0,-1), B(-1,-2,-4), C(-1,2,4), D(7,-3,1). Найдите:
а) длину ребра AB;
б) косинус угла между векторами AB и AC ;
в) уравнение ребра AB;
г) уравнение грани ABC;
д) уравнение высоты, опущенной из вершины D на грань ABC;
е) координаты векторов e 1= AB , e 2= AC , e 3= AD и докажите, что они образуют линейную независимую систему;
ж) координаты вектора MN , где M и N – середины ребер AD и DC соответственно;
з) разложение вектора MN по базису ( e 1, e 2, e 3)
Решение. Пункты (а-д) решаются через онлайн калькулятор.
Задание 1 . Разложить вектор d =(8;-5) по векторам a =(1;-2) и b =(2;3).
Решение. Векторы a и b образуют базис на плоскости, так как они не коллинеарны (, то есть соответствующие координаты этих векторов не пропорциональны).
Следовательно, вектор d = α a +β b , где α и β – коэффициенты, которые надо найти.
Таким образом, имеем равенство
8i-5j=α(i-2j)+β(2i+3j)=(α+2β)i+ (-2α+3β)j.
В координатной форме это равенство примет вид
Решим полученную систему уравнений.
Координаты и преобразования координат в линейном пространстве
Координаты векторов в данном базисе линейного пространства
Пусть — базис линейного пространства . Каждый вектор можно разложить по базису (см. теорему 8.1), т.е. представить в виде , причем коэффициенты в разложении определяются однозначно. Эти коэффициенты называются координатами вектора в базисе (или относительно базиса ). Координаты вектора — это упорядоченный на бор чисел, который представляется в виде матрицы-столбца и называется координатным столбцом вектора (в данном базисе). Вектор и его координатный столбец обозначаются одной и той же буквой полужирной или светлой соответственно.
Если базис (как упорядоченный набор векторов) представить в виде символической матрицы-строки , то разложение вектора по базису можно записать следующим образом:
Здесь умножение символической матрицы-строки на числовую матрицу-столбец производится по правилам умножения матриц.
При необходимости, если речь идет о разных базисах, у координатного столбца указывается обозначение базиса, относительно которого получены координаты, например, — координатный столбец вектора в базисе .
Из теоремы 8.1 следует, что равные векторы имеют равные соответствующие координаты (в одном и том же базисе), и наоборот, если координаты векторов (в одном и том же базисе) соответственно равны, то равны и сами векторы .
Линейные операции в координатной форме
Пусть — базис линейного пространства , векторы и имеют в этом базисе координаты и соответственно, т.е.
Складывая эти равенства, получаем .
т.е. при сложении векторов их координаты складываются .
Умножая второе равенство в (8.7) на число , получаем
т.е. при умножении вектора на число все его координаты умножаются на это число .
Другими словами, сумма векторов имеет координаты , а произведение имеет координаты . Разумеется, что все координаты получены в одном базисе .
1. Нетрудно показать, что координатный столбец линейной комбинации векторов равен линейной комбинации координатных столбцов этих векторов.
2. Если система векторов линейно зависима (линейно независима), то их координатные столбцы, полученные относительно одного базиса, образуют линейно зависимую (соответственно, линейно независимую) систему. Это следует из равносильности равенств и . Например, если в этих равенствах не все коэффициенты равны нулю, т.е. система векторов и система их координатных столбцов линейно зависимы одновременно.
3. Все свойства линейной зависимости и линейной независимости векторов переносятся без изменений на их координатные столбцы, полученные в одном и том же базисе. И наоборот, свойства для матриц-столбцов, переносятся на векторы, если матрицы-столбцы считать их координатными столбцами.
4. Выбрав в n-мерном вещественном линейном пространстве некоторый базис, можно установить взаимно однозначное соответствие: каждому вектору поставить в соответствие его координатный столбец (в вы бранном базисе), и наоборот, каждому координатному столбцу поставить в соответствие вектор. Другими словами, любой фиксированный базис n-мерного вещественного линейного пространства позволяет установить взаимно однозначное соответствие между всеми векторами вещественно го пространства и всеми столбцами n-мерного арифметического пространства . Это соответствие обозначается . Для n-мерного комплексного линейного пространства аналогичное взаимно однозначное соответствие устанавливается с пространством .
Преобразование координат вектора при замене базиса
Пусть заданы два базиса пространства и . Базис будем условно называть «старым», а базис — «новым». Пусть известны разложения каждого вектора нового базиса по старому базису:
Записывая по столбцам координаты векторов в базисе , составляем матрицу:
Квадратная матрица , составленная из координатных столбцов векторов нового базиса в старом базисе , называется матрицей перехода от старого базиса к новому. При помощи матрицы перехода (8.9) формулы (8.8) можно записать в виде:
Умножение символической матрицы-строки на матрицу перехода в (8.10) производится по правилам умножения матриц.
Пусть в базисе вектор имеет координаты , а в базисе — координаты , т.е.
Подставляя в правую часть последнего равенства выражение (8.10), получаем — два разложения вектора в одном и том же базисе . Коэффициенты этих разложений должны совпадать (по теореме 8.1), так как это координаты одного и того же вектора в одном базисе. Поэтому
Формула (8.11) устанавливает связь координат вектора в разных базисах: координатный столбец вектора в старом базисе получается в результате умножения матрицы перехода на координатный столбец вектора в новом базисе .
Пример 8.3. В пространстве многочленов степени не выше второй даны две системы многочленов:
Доказать, что каждая система является базисом пространства . Найти матрицу перехода от базиса к базису . Определить координаты квадратного трехчлена относительно базисов и .
Решение. Система многочленов является стандартным базисом пространства . Докажем, что система является базисом. По ступим следующим образом. Найдем координатные столбцы этих многочленов в стандартном базисе. Раскладывая по базису , получаем
Составим из этих столбцов матрицу . Ранг этой матрицы равен 3, так как . Следовательно, столбцы линейно независимы, тогда и многочлены линейно независимы (см. пункт 2 замечаний 8.5). Итак, многочлены являются базисом пространства , а матрица — искомая матрица перехода от базиса к базису . Осталось найти координаты многочлена в этих базисах. Раскладывая по базисам, находим
Проверим результат, вычисляя по формуле (8.11):
Свойства матрицы перехода от одного базиса к другому
1. Пусть имеются три базиса пространства и известны матрицы перехода: от базиса к базису ; от к ; от к . Тогда
Действительно, запишем связь (8.10) для данных базисов:
Подставляя первое выражение во второе равенство, получаем . Сравнивая с третьим равенством, приходим к (8.12).
2. Если — матрица перехода от базиса к базису , то матрица обратима и обратная матрица является матрицей перехода от базиса к базису . Координаты вектора в базисах и связаны формулами:
В самом деле, пусть — матрица перехода от базиса к базису . Учитывая, что матрица перехода от базиса к базису — единичная, применяем свойство 1 к трем базисам . Для трех базисов аналогично получаем: . Следовательно, .
3. Всякая обратимая квадратная матрица n-го порядка может служить матрицей перехода от одного базиса n-мерного линейного пространства к другому базису.
Пример 8.4. В двумерном арифметическом пространстве даны два базиса: и . Найти матрицу перехода от базиса к базису и координаты вектора в каждом из базисов.
Решение. Рассмотрим стандартный базис пространства . Находим координаты векторов в стандартном базисе. Раскладываем вектор
В стандартном базисе пространства координатный столбец совпадает с вектором . Для других векторов аналогично получаем . Из координатных столбцов составим матрицы перехода (8.9) от стандартного базиса к данным базисам и
По свойству 1 матриц перехода имеем . .По свойству 2: . Поэтому
В стандартном базисе пространства координатный столбец совпадает с вектором . Найдем координаты этого вектора в базисе (по свойству 2 матрицы перехода):
В самом деле, справедливо разложение
Найдем координаты вектора в базисе двумя способами
Полученный результат подтверждает разложение:
Замена базиса и системы координат
Изменение базиса.
До сих пор мы предполагали, что рассматривается один базис. Однако выбор базиса ничем не ограничен, и принципиальное значение имеет задача о нахождении компонент вектора в одном базисе по его компонентам в другом базисе. При этом положение нового базиса относительно старого должно быть задано, а именно должны быть известны компоненты новых базисных векторов (boldsymbol>), (boldsymbol>) и (boldsymbol>) в старом базисе (boldsymbol>), (boldsymbol>), (boldsymbol>). Пусть:
$$
begin
boldsymbol> = a_<1>^<1>boldsymbol> + a_<1>^<2>boldsymbol> + a_<1>^<3>boldsymbol>,\
boldsymbol> = a_<2>^<1>boldsymbol> + a_<2>^<2>boldsymbol> + a_<2>^<3>boldsymbol>,\
boldsymbol> = a_<2>^<1>boldsymbol> + a_<2>^<2>boldsymbol> + a_<2>^<3>boldsymbol>,
endlabel
$$
Соотношения eqref и являются решением нашей задачи. Если нас заинтересует выражение новых компонент через старые, то надо будет решить систему уравнений eqref относительно неизвестных (alpha’_<1>), (alpha’_<2>), (alpha’_<3>). Результат будет иметь такой же вид, как eqref, только коэффициентами будут компоненты старых базисных векторов в новом базисе.
Точно тем же способом получаются формулы, связывающие компоненты вектора в разных базисах на плоскости. Вот они:
$$
begin
& alpha_ <1>= a_<1>^<1>alpha’_ <1>+ a_<1>^<2>alpha’_<2>,\
& alpha_ <2>= a_<2>^<1>alpha’_ <1>+ a_<2>^<2>alpha’_<2>.
endlabel
$$
Коэффициенты в формулах eqref можно записать в таблицу:
$$
begin
a_<1>^<1>& a_<2>^<1>& a_<3>^<1>\
a_<1>^<2>& a_<2>^<2>& a_<3>^<2>\
a_<1>^<3>& a_<2>^<3>& a_<3>^<3>
endlabel
$$
Она называется матрицей перехода от базиса (boldsymbol>), (boldsymbol>), (boldsymbol>) к базису (boldsymbol>), (boldsymbol>), (boldsymbol>). В ее столбцах стоят компоненты векторов (boldsymbol>), (boldsymbol>), (boldsymbol>) в старом базисе.
Изменение системы координат.
Рассмотрим теперь две декартовы системы координат: старую (O), (boldsymbol>), (boldsymbol>), (boldsymbol>) и новую (O’), (boldsymbol>), (boldsymbol>), (boldsymbol>). Пусть (M) — произвольная точка, и координаты ее в этих системах обозначены ((x), (y), (z)) и ((x’), (y’), (z’)). Поставим себе задачу выразить (x), (y) и (z) через (x’), (y’) и (z’), считая известным положение новой системы относительно старой. Оно определяется координатами ((a_<0>^<1>, a_<0>^<2>, a_<0>^<3>)) точки (O’) в системе координат (O), (boldsymbol>), (boldsymbol>), (boldsymbol>) и компонентами векторов (boldsymbol>), (boldsymbol>), (boldsymbol>), составляющими матрицу перехода eqref.
Радиус-векторы точки (M) относительно точек (O) и (O’) связаны равенством (overrightarrow = overrightarrow + overrightarrow), которое мы можем записать в виде
$$
overrightarrow = overrightarrow + x’boldsymbol> + y’boldsymbol> + z’boldsymbol>,label
$$
так как (x’), (y’) и (z’) — компоненты (overrightarrow) в базисе (boldsymbol>), (boldsymbol>), (boldsymbol>). Разложим каждый член равенства eqref по базису (boldsymbol>), (boldsymbol>), (boldsymbol>), имея в виду, что компоненты векторов (overrightarrow) и (overrightarrow) равны координатам точек (M) и (O’), которые мы обозначили ((x), (y), (z)) и ((a_<0>^<1>, a_<0>^<2>, a_<0>^<3>)), Мы получим
$$
begin
& x = a_<0>^ <1>+ a_<1>^<1>x’ + a_<2>^<1>y’ + a_<3>^<1>z’,\
& y = a_<0>^ <2>+ a_<1>^<2>x’ + a_<2>^<2>y’ + a_<3>^<2>z’,\
& z = a_<0>^ <3>+ a_<1>^<3>x’ + a_<1>^<3>y’ + a_<1>^<3>z’.
endlabel
$$
Равенства eqref представляют собой закон преобразования координат точки при переходе от одной декартовой системы координат в пространстве к другой такой же системе.
Замена декартовой прямоугольной системы координат на плоскости.
Формулы перехода от одной декартовой системы координат на плоскости к другой получаются из eqref, если там оставить только первые два равенства и в них вычеркнуть члены с (z’):
$$
begin
& x = a_<1>^<1>x’ + a_<2>^<1>y’ + a_<0>^<1>,\
& y = a_<1>^<2>x’ + a_<2>^<2>y’ + a_<0>^<2>.
endlabel
$$
Рассмотрим частный случай, когда обе системы координат декартовы прямоугольные. Через (varphi) обозначим угол между векторами (boldsymbol>) и (boldsymbol>) отсчитываемый в направлении кратчайшего поворота от (boldsymbol>) к (boldsymbol>). Тогда (рис. 3.1)
$$
begin
& boldsymbol> = cos varphi boldsymbol> + sin varphi boldsymbol>,\
& boldsymbol> = cos left(varphi pm frac<pi><2>right) boldsymbol> + sin left(varphi pm frac<pi><2>right) boldsymbol>.
endnonumber
$$
Рис. 3.1
В разложении (boldsymbol>) ставится знак плюс, если кратчайший поворот от (boldsymbol>) к (boldsymbol>) направлен так же, как кратчайший поворот от (boldsymbol>) к (boldsymbol>), то есть если новый базис повернут относительно старого на угол (varphi). Знак минус в разложении (boldsymbol>) ставится в противоположном случае, когда новый базис не может быть получен поворотом старого.
Поскольку (displaystyle cos left(varphi pm frac<pi><2>right) = mp sin varphi), (displaystyle sin left(varphi pm frac<pi><2>right) = pm cos varphi), получаем
$$
begin
& x = x’ cos varphi mp y’ sin varphi + a_<0>^<1>,\
& y = x’ sin varphi pm y’ cos varphi + a_<0>^<2>.
endlabel
$$
причем при повороте системы координат берутся верхние знаки.
http://mathhelpplanet.com/static.php?p=pryeobrazovaniya-koordinat-v-linyeinom-prostranstve
http://univerlib.com/analytic_geometry/vector_algebra/basis_change/
ЛИНЕЙНЫЕ ОПЕРАЦИИ НАД ВЕКТОРАМИ В КООРДИНАТНОЙ ФОРМЕ
- При умножении вектора на число все его координаты
умножаются на это число, т.е. если .
.
Действительно,
используя свойства операций умножения вектора на число и сложении векторов
будем иметь .
.При сложении векторов их соответствующие
координаты складываются, т.е. если .
.Доказательство очевидно.
Условие
коллинеарности двух векторов в
коорднинатной форме.Два вектора коллинеарны тогда и только
тогда, когда их соответствующие координаты пропорциональны. Т.е. если , то
, то .
. Доказательство:
- Пусть вектор
 коллинеарен , тогда найдется λ такое, что
коллинеарен , тогда найдется λ такое, что  . Значит,
. Значит,  и
и  . Поскольку
. Поскольку
разложение вектора по элементам базиса единственно, то
единственно, то  .
.
- Пусть выполняется равенство
 . Обозначим коэффициент пропорциональности через λ. Тогда и, следовательно,
. Обозначим коэффициент пропорциональности через λ. Тогда и, следовательно,
 , т.е.
, т.е.  . Теорема доказана.
. Теорема доказана.
Пример.
- Даны векторы
 . Найти вектор
. Найти вектор  .
.
 .
. - Найти координаты вектора
 в базисе, образованном
в базисе, образованном
векторами ,
,  , .
, .
Обозначим координаты вектора
 в новом базисе
в новом базисе  . Тогда в новом базисе будем иметь:
. Тогда в новом базисе будем иметь:
Итак,
 .
.
Рассмотрим две произвольные точки
 и
и  . Найдем координаты вектора
. Найдем координаты вектора  .
.Очевидно, что
 . Но по определению координат вектора
. Но по определению координат вектора  и
и  . Следовательно,
. Следовательно, 
Таким образом, чтобы найти координаты вектора
, нужно из координат его конца вычесть соответствующие
координаты начала.Примеры.
- Заданы точкиA(1; -2; 3), B(2; 0; -1). Найти вектор
 .
.

- Даны A(-2; 3; 1), В(-1; 2; 0), С(0; 1; 1).
Найти .
.


- Известно, что
 . Найти координаты точки D, если
. Найти координаты точки D, если
А(3; -4; -1), В(-4; 4; 1), С(-3; -5; 4).
Пусть
 тогда
тогда . С другой стороны
. С другой стороны  . Следовательно, должно выполняться равенство (x+3; y+5; z-4)=(5;10;-8).
. Следовательно, должно выполняться равенство (x+3; y+5; z-4)=(5;10;-8).
Отсюдаx=2, y=5, z=-4, т.е. точка D имеет координаты D(2; 5; -4).
- Даны векторы
- Пусть вектор
 .
.


СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ И ЕГО СВОЙСТВА

Мы рассмотрели умножение вектора на число. Однако во многих задачах механики и
физики встречается операция умножения вектора на вектор. Но при этом результат
может быть как числом, так и вектором. Поэтому рассматривают два вида умножения
векторов: скалярное и векторное.
Пусть даны два вектора ![]() и
и ![]() , угол между, которыми равен
, угол между, которыми равен ![]() .
.
Скалярным произведением
векторов ![]() и
и ![]() называется
называется
число, равное произведению длин этих векторов на косинус угла между ними.
Скалярное произведение обозначается ![]() . Итак,
. Итак, ![]() .
.
Если один из векторов нулевой, то угол не определен, и скалярное
произведение по определения считается равным нулю.
Рассмотрим свойства скалярного
произведения.
- Скалярное произведение двух
векторов подчиняется коммутативному закону, т.е. для любых векторов и  .
.
Очевидно, из определения скалярного произведения:
 .
. - Для любого числа λ и любых векторов
 имеем:
имеем:
 .
.Доказательство. Ограничимся случаем, когда λ > 0. В этом случае
угол между векторами и совпадает с
углом между векторами и ,
и ,  .
. Поэтому
 . Откуда
. Откуда 
Аналогично доказывается и равенство
 .
.Случай λ
<0 рассмотреть самостоятельно. - Для любых векторов
 выполняется
выполняется
равенство .
.
Доказательство. Используя определение скалярного произведения и
свойства проекций вектора на ось, будем иметь
- Для любого вектора выполняется
соотношение .
.
Действительно, так как
 , то
, то  .
.Из
этого свойства в частности следует .
. - Скалярное произведение двух
векторов равно нулю тогда и только тогда,когда равен нулю один из сомножителей или векторы перпендикулярны.Это свойство очевидно из определения скалярного произведения.
Таким образом, необходимым и достаточным условием ортогональности двух
векторов является равенство нулю их скалярного произведения.Пример. Дан вектор
 . Известно, что
. Известно, что 
Найти
 .
.Имеем
 , т.е.
, т.е.  .
.Найдем:

Следовательно,
 .
.


Рассмотрим, как находится скалярное произведение векторов, если они заданы в координатной
форме. Пусть даны два вектора ![]() и
и ![]() .
.
Рассмотрим сначала все возможные скалярные произведения векторов ![]() друг на друга.
друг на друга.
Поэтому

Итак, скалярное произведение векторов равно сумме произведений
соответствующих координат: ![]() .
.
Это соотношение позволяет вычислить длину вектора через его координаты:
![]() .
.
Далее из определения скалярного произведения ![]() находим
находим
 .
.
Выражая скалярное произведение и длины векторов через их координаты,получим формулу для нахождения косинуса угла
между векторами
 .
.
Условие ортогональности двух
векторов:
![]() или
или ![]() .
.
Т.о., для того чтобы
два вектора были перпендикулярны необходимо и достаточно, чтобы сумма
произведений соответствующих координат этих векторов была равна нулю.
Примеры.
- Пусть А(-1; 1; 0), B(3; 1; -2),
 . Найти:
. Найти:
- ;
 и ;
и ; .
.
 .
. .
. .
.
- Найти
 в
в  , если известны координаты его вершин A(1; 5; 6),
, если известны координаты его вершин A(1; 5; 6),
B(5; 3; 10), C(2; 1; 14).

- При каком значении m векторы
 и
и  перпендикулярны?
перпендикулярны?
Условие ортогональности двух векторов
 .
. . Следовательно, m = 15.
. Следовательно, m = 15.


ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ И ЕГО СВОЙСТВА


Введем сначала понятие ориентации тройки векторов.
Пусть даны три некомпланарных вектора ![]() с общим
с общим
началом, перечисленных в определенном порядке: первый – ![]() , второй –
, второй – ![]() , третий –
, третий – ![]() .
.
Тройка некомпланарных векторов ![]() называется правоориентированной
называется правоориентированной
или просто правой, если из конца
третьего вектора кратчайший поворот от первого ко второму виден против часовой
стрелки. В противном случае тройку векторов называют левой, в этом случае если мы будем смотреть с конца вектора ![]() , то кратчайший поворот от
, то кратчайший поворот от ![]() к
к ![]() осуществляется
осуществляется
по часовой стрелке.
Векторным произведением векторов ![]() и
и ![]() называется
называется
новый вектор ![]() , удовлетворяющий условиям:
, удовлетворяющий условиям:
- Длина вектора
 равна площади
равна площади
параллелограмма, построенного на векторах и . - Вектор перпендикулярен
плоскости этого параллелограмма. - Он направлен так, что векторы и образуют правую
тройку векторов.

Векторное произведение векторов ![]() и
и ![]() обозначается
обозначается
символом  . Если хотя бы один из сомножителей равен нулю, то
. Если хотя бы один из сомножителей равен нулю, то
векторное произведение по определению считают равным нулю
Векторное произведение обладает следующими свойствами:
- Из определения следует, что
длина векторного произведения численно равна площади параллелограмма,
построенного на векторах, и, следовательно, находится по формуле: .
.Таким образом,
 и
и  .
. - При перестановке
сомножителей векторное произведение меняет свой знак .
.
Действительно
из определения векторного произведения следует, что векторы и имеют одинаковые модули, расположены на одной прямой,
и имеют одинаковые модули, расположены на одной прямой,
но направлены в противоположные стороны. Поэтому, векторы и являются
противоположными векторами и поэтому. - Скалярный множитель можно
выносить за знак векторного произведения, т.е. для
любого числа λ и любых векторов
 .
.Доказательство этого свойства непосредственно следует из определения
векторного произведения. Докажем для λ > 0. В этом случае. Тогда по определению векторного произведения
Вектор
 перпендикулярен
перпендикулярен
векторам и . Вектор также  векторам и , т.к. векторы и ,
векторам и , т.к. векторы и ,  и лежат в одной
и лежат в одной
плоскости. Следовательно, векторы и коллинеарны. Очевидно, что направления их также совпадают.
Т. к. , и следовательно, , то
, и следовательно, , то  .
. Поэтому
.Аналогично проводится доказательство для случая λ < 0.
- Для любых векторов
 имеет место
имеет место
равенство .
.Примем без доказательства.
- Векторное произведение двух
векторов равно нулевому вектору тогда и только тогда, когда один из
сомножителей равен нулю или векторы коллинеарны.Действительно, если векторы коллинеарны, то
, т.е. площадь
параллелограмма, построенного на данных векторах,равна нулю.Таким образом, для того чтобы два
ненулевых вектора были коллинеарны, необходимо и
достаточно, чтобы их векторное произведение равнялось нулевому вектору.В частности
 .
.


Примеры.
- Раскрыть скобки
 .
. - Найти площадь треугольника,
построенного на векторах и , если известно, что
и , если известно, что  и
и  .
.
 .
.Найдем
 .
. .
.
Можно показать, что если ![]() и
и ![]() , то координаты векторного произведения векторов
, то координаты векторного произведения векторов ![]() и
и ![]() находятся по формуле:
находятся по формуле:
 .
.
Примеры.
- Найти векторное произведение векторов
 и
и  .
.
 .
. - Найти площадь
 , если A(2; 3; 1), B(-1; -2; 0), C(-3; 0; 1).
, если A(2; 3; 1), B(-1; -2; 0), C(-3; 0; 1).

- Даны векторы
 . Найти параметры n, p, q если известно, что векторы и коллинеарны, а
. Найти параметры n, p, q если известно, что векторы и коллинеарны, а
векторы и ортогональны.
Так как векторы
и коллинеарны, то  . Векторы и ортогональны, поэтому
. Векторы и ортогональны, поэтому  . Итак, получили систему уравнений
. Итак, получили систему уравнений 
 .
.

Координаты вектора в базисе
В системе векторов a1, a2, a3, a4 найти любую подсистему векторов, которые образуют базис, разложить векторы по базису, перейти к другому базису, найти коэффициенты разложения векторов во втором базисе; в обоих случаях определить обратные матрицы, соответствующие векторам базиса. Правильность вычисления в каждом случае проверить с помощью умножения вектора слева на матрицу, обратную матрице вектора базиса.
Пример №2 . В системе векторов a1, a2, a3, a4 найти любую подсистему векторов, которые образуют базис, разложить векторы по базису, перейти к другому базису, найти коэффициенты разложения векторов во втором базисе; в обоих случаях определить обратные матрицы, соответствующие векторам базиса. Правильность вычисления в каждом случае проверить с помощью умножения вектора слева на матрицу, обратную матрице вектора базиса.
a1=(1;5;3), a2=(2;1;-1), a3=(4;2;1), a4=(17;13;4).
4.3.3 Формулы перехода от одного базиса к другому
Очевидно, что в одном и том же пространстве можно выбрать множество базисов. Пусть в  выбрано два базиса
выбрано два базиса  и
и  .
.
Векторы базиса  могут быть выражены через векторы базиса
могут быть выражены через векторы базиса  :
:
 (4)
(4)
Матрица  называется матрицей перехода от базиса к базису . В ее столбцах записаны координаты векторов
называется матрицей перехода от базиса к базису . В ее столбцах записаны координаты векторов  относительно базиса
относительно базиса  .
.
Соотношения (4) называются формулами перехода от базиса к базису . Их можно записать в матричной форме:
 , отсюда
, отсюда  .
.
Пусть вектор  задан своими координатами относительно базиса –
задан своими координатами относительно базиса –  , а относительно базиса –
, а относительно базиса –  . Тогда
. Тогда
 и
и  . (5)
. (5)
Пример 4. Относительно базиса  ,
,  ,
,  даны четыре вектора
даны четыре вектора  ,
,  ,
,  и
и  . Векторы
. Векторы  можно принять за базис в
можно принять за базис в  . Найти координаты вектора в базисе
. Найти координаты вектора в базисе  .
.
Решение. Матрица перехода от базиса  к базису имеет вид
к базису имеет вид  . Обозначим координаты вектора в базисе через
. Обозначим координаты вектора в базисе через  . Согласно формулам (5), имеем:
. Согласно формулам (5), имеем:
 . Находим
. Находим  :
:  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 .
.
Проверка:  ;
;
 ;
;
 или
или  .
.
Анал_Геом / Изменение координат вектора при изменении базиса
Пусть в  -мерном линейном пространстве
-мерном линейном пространстве  выбран базис
выбран базис  , который мы будем для удобства называть «старый» и другой базис
, который мы будем для удобства называть «старый» и другой базис  , который мы будем называть «новый». Возьмем призвольный вектор
, который мы будем называть «новый». Возьмем призвольный вектор  из
из  . Его координатный столбец в старом базисе обозначим
. Его координатный столбец в старом базисе обозначим  , а в новом —
, а в новом —  . Нам нужно выяснить, как связаны друг с другом координаты в старом и в новом базисе. Для этого нам сначала нужно «связать» друг с другом старый и новый базисы. Запишем разложения новых базисных векторов по старому базису
. Нам нужно выяснить, как связаны друг с другом координаты в старом и в новом базисе. Для этого нам сначала нужно «связать» друг с другом старый и новый базисы. Запишем разложения новых базисных векторов по старому базису

Составим матрицу, столбцами которой служат координатные столбцы векторов нового базиса

Эта матрица называется матрицей перехода от старого базиса к новому.
Замечание 18.1 Матрица перехода всегда невырождена, то есть  .
.
Предложение 18.5 Координатные столбцы в старом базисе и в новом базисе связаны формулой

где справа стоит произведение матрицы перехода  на матрицу-столбец.
на матрицу-столбец.
Доказательство. Так как  — координатный столбец вектора
— координатный столбец вектора  в новом базисе, то
в новом базисе, то

Заменив векторы  их разложениями по старому базису, получим
их разложениями по старому базису, получим

В силу предложения 14.3 изменим порядок суммирования
Здесь мы получили разложение вектора  по старому базису, причем координата вектора с номером
по старому базису, причем координата вектора с номером  равна
равна  . Элемент с номером
. Элемент с номером  столбца
столбца  будет иметь такой же вид. Следовательно, формула (18.1) доказана.
будет иметь такой же вид. Следовательно, формула (18.1) доказана.
Пример 18.4 Пусть  , то есть
, то есть  — трехмерное векторное пространство. Пусть задан ортонормированный базис i, j, k. Выберем другой (новый) базис
— трехмерное векторное пространство. Пусть задан ортонормированный базис i, j, k. Выберем другой (новый) базис

Возьмем вектор  . Найдем его координаты в новом базисе.
. Найдем его координаты в новом базисе.
Выпишем матрицу перехода, ее столбцы — это координаты новых базисных векторов

Пусть  — координатный столбец вектора
— координатный столбец вектора  в новом базисе. Тогда
в новом базисе. Тогда

Найдем матрицу  по формуле (14.14). Находим определитель
по формуле (14.14). Находим определитель

Находим алгебраические дополнения


Находим координаты вектора

Таким образом, новые координаты вектора  :
:  ,
,  ,
,  ,
,  .
.
Тот же самый результат можно было получить, записав формулу (18.2) в виде системы уравнений

Решив эту систему, например, методом Гаусса, найдем новые координаты  ,
,  ,
,  .
.
Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке.