1. Типовые задачи с решениями
Задача 1.1.
Найти координаты образа
![]()
и прообраза
![]()
точки
![]()
при повороте вокруг начала координат
на угол
![]()
.
Решение.
Найдем аналитическое выражение поворота,
данного в задаче:
![]()
![]()
Чтобы найти
координаты образа
точки
![]()
,
надо подставить в эти формулы вместо
![]()
и
![]()
данные координаты точки
,
т.е.
![]()
.
Тогда
![]()
;
![]()
,
т.е.
![]()
.
Чтобы найти
координаты прообраза
точки
,
т.е. координаты точки, для которой
теперь является образом, надо положить
![]()
и найти
и
:
![]()
Умножив второе
уравнение системы на
![]()
и сложив с первым, найдем
:
![]()
Подставляя найденное
значение
в одно из уравнений системы, найдем
:
![]()
Таким образом,
![]()
.
Ответ:
,
.
Задача 1.2.
Найти уравнение образа
![]()
и прообраза
![]()
прямой
![]()
при осевой симметрии с осью
![]()
.
Решение.
Аналитическое выражение осевой симметрии
![]()
имеет вид:
![]()
Чтобы найти
уравнение образа
прямой
![]()
,
нужно выразить из этой системы
и
и подставить их в уравнение прямой
:
![]()
.
Опуская штрихи, получаем:
![]()
.
Чтобы найти
уравнение прообраза
прямой
,
запишем уравнение прямой
(образа прямой
)
в виде
![]()
и подставим в него
![]()
и
![]()
из аналитического выражения
:
![]()
.
Получили для прямых
и
одно и то же уравнение. Это не случайно,
т.к. при осевой симметрии (так же как и
при центральной) образ и прообраз любой
фигуры всегда совпадают.
Ответ:
,
![]()
.
Задача 1.3.
Даны прямые
![]()
и
![]()
.
Найти такие точки
и
![]()
,
что
![]()
и
![]()
,
где
![]()
.
Решение.
![]()
,
т.е.
![]()
.
Тогда учитывая, что
![]()
,
получаем:
![]()
(рис. 18).
С
ледовательно,
чтобы найти координаты точки
,
надо сначала найти уравнение образа
![]()
прямой
при параллельном переносе на вектор
![]()
,
а затем решить систему уравнений прямых
и
![]()
.
Найдем аналитическое
выражение параллельного переноса на
вектор
:
![]()
Найдем уравнение
образа
![]()
:
![]()
,
т.е.
![]()
.
Решаем систему
![]()
Сложив почленно
уравнения системы, получим:
![]()
.
Итак,
![]()
.
Так как
,
то
![]()
,
т.е.
−
прообраз точки
.
Найдем координаты прообраза
точки
:
![]()
откуда
![]()
,
т.е.
![]()
.
Ответ:
,
.
2. Задачи для решения на практическом занятии
2.1.
Вывести аналитическое выражение
центральной симметрии с центром
![]()
.
2.2. Найти
координаты образа
и прообраза
![]()
точки
![]()
в центральной симметрии с центром
![]()
.
2.3.
Найти уравнение образа
![]()
и прообраза
![]()
прямой
![]()
при повороте на угол
![]()
вокруг начала координат.
2.4.
В ортонормированном репере дано
аналитическое выражение преобразований
![]()
и
![]()
:
![]()
Доказать, что
и
− движения. Определить их род. Найти их
инвариантные точки.
2.5.
Даны прямые
![]()
и
![]()
.
Найти координаты таких точек
и
,
что
,
![]()
и
![]()
.
2.6.
Найти уравнение оси симметрии точек
![]()
и
![]()
.
3. Задачи для самостоятельного решения
3.1.
Найти координаты образа
![]()
и прообраза
![]()
точки
![]()
при параллельном переносе на вектор
![]()
.
3.2.
Найти уравнение образа
и прообраза
прямой
![]()
при
центральной симметрии с центром
![]()
.
3.3.
Даны прямые
![]()
и
![]()
.
Найти координаты таких точек
и
,
что
![]()
,
![]()
и
![]()
.
3.4.
Найти инвариантные точки преобразования,
заданного формулами:
а)
![]()
б)
![]()
3.5.
Найти аналитическое выражение композиции
осевых симметрий![]()
и определить вид этого движения.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Отображения и преобразования множеств. Аналитическое выражение преобразований, группа преобразований. Движения плоскости. Простейшие виды движений
Лекция 9. Отображения и преобразования множеств. Аналитическое выражение преобразований, группа преобразований. Движения плоскости. Простейшие виды движений
Литература. [1] § 39, 40.
Пусть дано отображение . Если для любого элемента y из существует только один прообраз, то отображение называется инъективным или однозначным. В этом случае нельзя найти два элемента и множества X, для которых . Если при отображении f выполнено условие: , т.е. для любого элемента из Y существует по крайней мере один прообраз, то отображение называется сюръективным или отображением X на Y. Отображение, которое одновременно является сюръективным и инъективным, носит название биективного или взаимно однозначного отображения. Таким образом, отображение тогда и только тогда является биективным, когда для любого элемента y из множества Y существует один и только один элемент x из X, для которого .
Пусть взаимно однозначное отображение множества X на множество Y. Поставим в соответствие каждому элементу y из Y его прообраз x из множества X. Мы построили отображение , которое носит название обратного к отображению . Оно обычно обозначается через . Легко показать, что также биективное отображение. Действительно, в силу того, что взаимно однозначное отображение, для любого элемента y из Y существует один и только один прообраз x в множестве X. Таким образом, каждому элементу y из Y ставится в соответствие один и только один элемент из X.
Определение 1. Взаимно однозначное отображение множества X на себя называется преобразованием этого множества.
Если дана некоторая плоскость, то её отображение в себя можно задать в координатной форме. Выберем на плоскости некоторую аффинную систему координат. Рассмотрим отображение . Будем считать, что точке ставится в соответствие точка . Координаты точки зависят от , координат точки :
(1)
Обратно, если заданы функции (1), то можно считать что они определяют некоторое отображение плоскости в себя: каждой точке ставится в соответствие точка . Соотношения (1) называются аналитическим выражением или формулами отображения f.
Пример 1. Отображение f задано своими аналитическим выражением Выяснить, является ли оно преобразованием плоскости.
Решение. Проверим условия инъективности и сюръективности. Пусть и — точки, удовлетворяющие условию . Тогда: Отсюда: Мы получили систему уравнений относительно и . Легко видеть, она совместна и имеет единственное решение . Таким образом, из условия следует, что точки и совпадают. Отображение f является инъективным.
Пусть произвольная точка плоскости. Для того чтобы существовала такая точка A, для которой , достаточно, чтобы её координаты удовлетворяли системе уравнений: Так как определитель этой системы отличен от нуля, то она всегда имеет единственное решение. Нетрудно выразить x и y через x’ и y’. Для этого сложим уравнения системы и вычтем из первого удвоенное второе. После преобразований получим: Сюръективность отображения f доказана. Таким образом, f преобразование плоскости.
Пример 2. Дано аналитическое представление преобразования f плоскости:
Найти формулы обратного преобразования.
Решение. Отображение каждой точке плоскости ставит в соответствие точку , для которой . Обозначим координаты точек и через x, y и x’, y’. Из данного аналитического представления следует: Выразим отсюда x’, y’ через x, y: , . Таким образом, формулы обратного преобразования имеют вид:
Рассмотрим примеры необходимых нам преобразований плоскости и выведем их аналитические выражения.
Определение 2. Пусть дан вектор . Отображение плоскости на себя, которое каждой точке M ставит в соответствие такую точку M’, для которой называется параллельным переносом плоскости на вектор .
Легко видеть, параллельный перенос является преобразованием плоскости, его будем обозначать через . Найдем аналитическое выражение параллельного переноса. Пусть в выбранной системе координаты вектор равны . Предположим, что точка M имеет координаты x и y, a её образ x’ и y’. Так как , то . Отсюда получим формулы параллельного переноса:
(2)
Рассмотрим еще одно преобразование вращение плоскости.

Определение 3. Пусть на ориентированной плоскости даны точка O и ориентированный угол . Преобразование, которое точке O ставит в соответствие ту же точку O, а любой точке A, отличной от O, — точку A’, удовлетворяющую условиям: . называется вращением плоскости с центром в точке O на угол .
Преобразование вращения будем обозначать через . Найдем его аналитическое выражение, при условии, что на плоскости дана прямоугольная декартова система координат, а центр вращения совпадает с ее началом.
Решение. Пусть точка A имеет координаты x и y, а её образ — x’ и y’. Обозначим через ориентированный угол между положительным направлением оси абсцисс и вектором (рис. 125). Тогда ориентированный угол между векторами и равен . Как было показано, , и , . Так как OA=OA’, то
==,==
Таким образом:
(3)
Соотношения (3) представляют собой аналитическое выражение вращения.
При формулы вращения имеют вид: В этом случае преобразование представляет собой центральную симметрию относительно центра вращения.
Определение 4. Пусть дана прямая l. Отображение, которое каждой точке прямой l ставит в соответствие ту же точку, a точке A, не принадлежащей l, — точку A’, удовлетворяющую условиям: прямая AA’ перпендикулярна l и середина отрезка AA’ принадлежит l, называется осевой симметрией плоскости с осью l.
Осевую симметрию будем обозначать через . Докажите самостоятельно, что осевая симметрия – преобразование плоскости. Пусть на плоскости выбрана прямоугольная декартовая система координат. Найдем аналитическое выражение осевой симметрии, при условии, что ее ось совпадает с осью абсцисс. Обозначим координаты точки A через x и y, а её образа A’ при указанной симметрии x’ и y’ (рис. 126). Тогда вектор параллелен оси ординат, a середина M отрезка AA’ лежит на оси абсцисс. Координаты вектора и точки M соответственно равны , . Используя условие параллельности вектора оси Оу, получим: или . Так как точка M лежит на оси Ох, то . Таким образом:
(4)
Формулы (4) являются искомым аналитическим выражением осевой симметрии.
Определение 5. Пусть f и g – два преобразования множества Х. Под произведением преобразования f на преобразование g будем понимать отображение, определяемое формулой , где х – произвольный элемент множества Х.
Покажем, что произведение преобразований также является преобразованием множества Х. Пусть . Так как f и g биективные отображения множества X на себя, то из следует и . Поэтому h инъективное отображение. Докажем его сюръективность. Пусть y — произвольный элемент из X. Тогда существует такой элемент z, что . Аналогично, существует такой элемент x из множества X, для которого . Отсюда вытекает, что . Таким образом, h сюръективное отображение. Биективность h доказана.
Пример 3. Найти формулы произведения , если даны аналитические выражения преобразований f и g:
Решение. Возьмем произвольную точку . Пусть , тогда координаты M’ равны . Обозначим через M» образ точки M’ при преобразовании g: . Используя формулы преобразования g, найдем координаты этой точки: , или . Таким образом, аналитическое выражение преобразования имеет вид:
Замечание. Если мы определим формулы произведения , то получим: (проведите вычисления самостоятельно). Отсюда видно, что произведение преобразований, вообще говоря, не обладает свойством коммутативности.
Определение 6. Преобразование, которое каждому элементу множества X ставит в соответствие тот же самый элемент, называется тождественным.
Тождественное преобразование обычно обозначается через e. Легко видеть, что аналитическое выражение тождественного преобразования плоскости имеет вид: Тождественное преобразование является нейтральным элементом относительно операции произведения преобразований, что означает, что для любого преобразования :. Действительно, возьмем произвольный элемент x множества X: .
Выберем произвольное преобразование и найдем произведение . Пусть y произвольный элемент множества X. Согласно определению обратного преобразования, элемент удовлетворяет условию: . Поэтому . Отсюда следует, что . Возьмем произвольный элемент х множества Х. Пусть , тогда . Таким образом, . Или: . Мы показали, что преобразование — обратное к преобразованию относительно операции произведения преобразований. И так, операция произведения преобразований обладает свойством обратимости. Она же, как отмечалось выше, не удовлетворяет свойству коммутативности. Докажем ее ассоциативность.
Теорема 1. Для любых трех преобразований f, g и h множества X справедливо равенство: .
Доказательство. Пусть x произвольный элемент множества X. Тогда из определения произведения преобразований получим: С другой стороны, Таким образом, для любого элемент x справедливо равенство: . Теорема доказана.
Из курса алгебры известно, что множество G называется группой, если на нем определена ассоциативная и обратимая алгебраическая операция. Если эта операция коммутативна, то G называется абелевой группой. Пусть F совокупность всех преобразований множества X. Произведение преобразований является ассоциативной и обратимой алгебраической операцией на F. Поэтому F группа относительно операции произведения преобразований. Она, вообще говоря, не является абелевой.
Определение 7. Любая подгруппа группы F называется группой преобразований множества X.
Пусть G — подмножество F. В силу теоремы 1, G тогда и только тогда группа преобразований, когда операция произведения преобразований алгебраически замкнута и обратима на G. Поэтому G группа преобразований в том и только в том случае, когда для любых двух элементов f и g из G их произведение принадлежит G, и для любого элемента f этому же множеству принадлежит и обратное преобразование .
Пример 4. Доказать, что множество, состоящее из четырех преобразований f, g, h и e образуют группу преобразований плоскости.
f: g: h: e:
Решение. Составим таблицу произведений элементов из G:
|
I II |
e |
f |
g |
h |
|
e |
e |
f |
g |
h |
|
f |
f |
e |
h |
g |
|
g |
g |
h |
e |
f |
|
h |
h |
g |
f |
e |
В таблице на пересечении соответствующей строки и столбца помещен результат произведения , те произведение элемента строки, умноженной слева на элемент столбца. Проверим, например, что. Пусть точка M имеет координаты x и y, . Точка M’ имеет координаты . Поэтому координаты точки равны . Отсюда следует, что . Результаты остальных произведений проверьте самостоятельно. Из таблицы следует, операция произведения преобразований алгебраически замкнута на G. Легко видеть, что e тождественное преобразование в G. Каждый элемент из G имеет обратный, причем он совпадает с самим элементом: . Нами проверено, что G группа преобразований.
Определение 1. Преобразование плоскости называется движением, если расстояние между образами любых двух точек совпадает с расстоянием между самими точками.
Таким образом, f движение плоскости в том и только в том случае, когда для любых двух её точек A и В выполнено равенство: . 
Покажем, что параллельный перенос, вращение и осевая симметрия, введенные нами в предыдущем параграфе, движения плоскости.

Рассмотрим параллельный перенос плоскости на вектор . Пусть A и В две произвольные точки, , их образы при рассматриваемом параллельном переносе. Следует доказать, что . Из определения параллельного переноса (см. § 28) получим: . Представим вектор в виде: (рис. 127). Отсюда следует, что . Так как векторы равны, то их длины совпадают. Параллельный перенос является движением.
Рассмотрим осевую симметрию с осью l. Пусть A и В — две произвольные точки, — их образы при данной осевой симметрии. Докажем, что . Выберем прямоугольную декартову систему координат так, чтобы ось абсцисс содержала прямую l (рис. 128). Если в этой системе точки А и В имеют координаты: , то из формулы осевой симметрии (см § 28) следует, что координаты точек A, и B равны: ). Найдем расстояния между этими точками: . Осевая симметрия – движение плоскости.
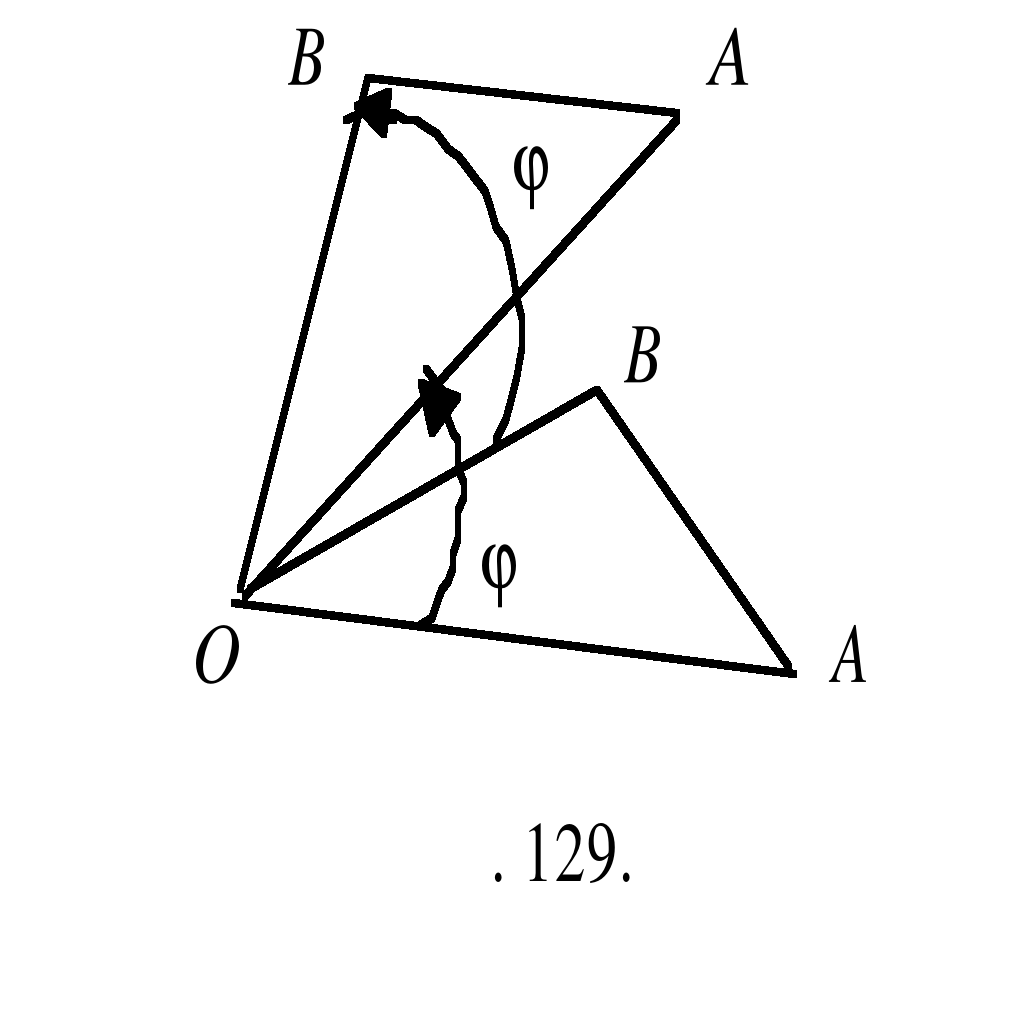
Наконец, рассмотрим вращение плоскости и покажем, что оно также является движением плоскости. Пусть A и B — две произвольные точки, их образы при вращении вокруг точки О на ориентированный угол (рис. 129). Воспользуемся аналитическими выражением вращения (см. § 28). Выберем прямоугольную декартовую систему координат так, чтобы её начало совпадало с центром О вращения. Пусть точки A, B, A’, B’ в этой системе имеют координаты: . Из формул вращения следует: Вычислим расстояние между точками A’ и B’:
Таким образом, при вращении сохраняется расстояние между точками. Утверждение доказано.
Отображения и преобразования множеств. Аналитическое выражение преобразований, группа преобразований. Движения плоскости. Простейшие виды движений
Объемы тел вращения
Краткая теория
Объемы тел, образованных вращением
криволинейной трапеции, ограниченной кривой
, осью
и двумя
вертикалями
и
, вокруг осей
и
, выражаются соответственно формулами:
Объем тела, образованного вращением
около оси
фигуры,
ограниченной кривой
, осью
и двумя
параллелями
и
, можно определять по формуле:
Если кривая задана в иной форме
(параметрически, в полярных координатах и т.д.), то в приведенных формулах
нужно сделать соответствующую замену переменной интегрирования.
В более общем случае объемы тел,
образованных вращением фигуры, ограниченной кривыми
и
(причем
) и прямыми
,
, вокруг координатных осей
и
, соответственно равны:
Объем тела, полученного при вращении
сектора, ограниченного дугой кривой
и двумя
полярными радиусами
,
, вокруг полярной оси, может быть вычислен по формуле:
Этой же формулой удобно пользоваться
при отыскании объема тела, полученного вращением вокруг полярной оси фигуры,
ограниченной некоторой замкнутой кривой, заданной в полярных координатах.
Если
– площадь
сечения тела плоскостью, перпендикулярной к некоторой прямой (которую принимаем
за ось
), в точке с абсциссой
, то объем этого тела равен:
где
и
– абсциссы
крайних сечений тела.
Примеры решения задач
Задача 1
С помощью
определенного интеграла вычислить объем тела, полученного вращением фигуры
вокруг указанной оси координат.
вокруг
оси
Решение
Сделаем
чертеж:
Объем
тела, образованного вращением вокруг оси
фигуры можно найти по формуле:
В нашем
случае получаем
Ответ:
Задача 2
Найдите
объем тела, полученного вращением вокруг оси абсцисс криволинейной трапеции,
ограниченной линиями:
и
.
Решение
На сайте можно заказать решение контрольной или самостоятельной работы, домашнего задания, отдельных задач. Для этого вам нужно только связаться со мной:
ВКонтакте
WhatsApp
Telegram
Мгновенная связь в любое время и на любом этапе заказа. Общение без посредников. Удобная и быстрая оплата переводом на карту СберБанка. Опыт работы более 25 лет.
Подробное решение в электронном виде (docx, pdf) получите точно в срок или раньше.
Сделаем
чертеж:
Объем
тела можно найти по формуле:
Ответ:
Задача 3
Определить
объем, образованный вращением кривой
вокруг
полярной оси.
Решение
Ответ:
Задача 4
Вычислить
объем тела, ограниченного однополосным гиперболоидом
и
плоскостями
.
Решение
Здесь
удобнее рассмотреть сечения данного тела плоскостями, перпендикулярными к оси
. Тогда объем выразится
формулой:
где
– площадь получаемого сечения, зависящая от
точки с аппликатой
, через которую проходит
секущая плоскость. При пересечении однополосного гиперболоида плоскостью
получается эллипс, который можно определить
уравнениями:
откуда
следует, что полуоси эллипса:
Учитывая, что площадь эллипса с
полуосями
и
равна
, воспользовавшись параметрическим заданием эллипса:
мы можем записать аналитическое
выражение функции
:
Тогда искомый объем:
Ответ:
Содержание:
- Сферическое движение твёрдого тела
- Исследование сферического движения твердого тела методом мгновенных осей
- Мгновенная ось вращения. Аксоиды
- Угловая скорость и угловое ускорение твердого тела во время сферического движения
- Вычисление углового ускорения тела
- Скорость и ускорение точек твердого тела во время сферического движения
- Исследование сферического движения твердого тела методом углов Эйлера
- Углы Эйлера. Уравнения сферического движения твердого тела
- Определение угловой скорости и углового ускорения тела по уравнениям его движения
- Аналитическое нахождения скоростей точек тела при сферическом движении. Уравнения мгновенной оси вращения
- Аналитическое нахождения ускоренний точек тела при сферическом движении
- Примеры решения задач на нахождение кинематических характеристик сферического движения тела
Сферическое движение (движение твёрдого тела вокруг неподвижной точки) — это движение абсолютно твёрдого тела, при котором оно имеет одну неподвижную точку.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Сферическое движение твёрдого тела
Если твердое тело движется так, что одна его точка остается все время неподвижной, то такое движение называется вращательным движением твердого тела вокруг неподвижной точки или сферическим движением. Название «сферический движение »следует из того, что траектории всех точек тела при таком движении размещены на поверхностях сфер, с центром в неподвижной точке.
Примером сферического движения тела может быть движение гироскопа в карданном подвесе или движение волчка, заостренный конец которой опирается на подставку и остается неподвижным.
При изучении кинематики сферического движения тела нужно установить основные характеристики этого движения, то есть уравнения движения, угловую скорость и угловое ускорение тела, и вывести формулы для вычисления скоростей и ускоренний точек тела. Ниже рассмотрим два основных метода исследования кинематики сферического движения: метод мгновенных осей и метод углов Эйлера.
Исследование сферического движения твердого тела методом мгновенных осей
Теорема Эйлера-Даламбера о конечном перемещении твердого тела во время сферического движения
Теорема. Твердое тело, имеющее одну неподвижную точку, можно переместить с одного положения в любое другое одним поворотом этого тела вокруг оси, проходящей через неподвижную точку.
Сформулированная теорема Эйлера-Даламбера является обобщением теоремы 2, доказанной в разделе 4 (см. § 4.2).
Доказательство. Положение свободного твердого тела в пространстве определяется
тремя его точками, которые не лежат на одной прямой. Во время сферического движения тела, когда одна точка является неподвижной, для определения его положения в пространстве достаточно знать положение двух его точек.
Для доказательства теоремы проведем сферическую поверхность произвольного радиуса с центром в неподвижной точке О. Будем считать, что эта сфера неизменно связана с телом S, что осуществляет сферическое движение, и поэтому положения сферы будет определять положение тела S в пространстве (Рис. 5.1).

Пусть положение  тела характеризуется дугой АВ большого круга, а положение II — этой же самой дугой
тела характеризуется дугой АВ большого круга, а положение II — этой же самой дугой  но во втором положении на сфере. аналогично том, как находится центр конечного вращения для плоской фигуры при движении ее в своей плоскости
но во втором положении на сфере. аналогично том, как находится центр конечного вращения для плоской фигуры при движении ее в своей плоскости
(Теорема 2 § 4.2), найдем точку Р на сфере в случае конечного перемещения тела с неподвижной точкой. Для этого соединим точки  с
с  и
и  с
с  дугами большого круга сферы. В серединах дуг
дугами большого круга сферы. В серединах дуг  и
и  из точек С и D проведем сферические перпендикуляры, то есть дуги большого круга СР и DР, касательные к которым перпендикулярны в точках
из точек С и D проведем сферические перпендикуляры, то есть дуги большого круга СР и DР, касательные к которым перпендикулярны в точках
С и D соответственно касательным к дугами . Эти перпендикуляры пересекаются в точке Р. С равенства прямоугольных сферических треугольников  и
и  которые имеют общий катет DP и равные катеты
которые имеют общий катет DP и равные катеты  и
и  следует, что гипотенузы этих сферических треугольников также равны между собой, то есть точки
следует, что гипотенузы этих сферических треугольников также равны между собой, то есть точки  и
и  равноудалены от точки Р.
равноудалены от точки Р.
Аналогично доказывается, что точки  и
и  также одинаково удалены от точки Р. Если вернуть заштрихованный сферический треугольник
также одинаково удалены от точки Р. Если вернуть заштрихованный сферический треугольник  вокруг оси
вокруг оси  то этот треугольник, двигаясь по сфере, совпадет всеми своими точками с равным ему (по трем сторонам
то этот треугольник, двигаясь по сфере, совпадет всеми своими точками с равным ему (по трем сторонам 
 сферическим треугольником
сферическим треугольником  Это следует из того, что сферический угол на сфере, на который нужно повернуть вокруг ОР дугу АР к совпадению с дугой
Это следует из того, что сферический угол на сфере, на который нужно повернуть вокруг ОР дугу АР к совпадению с дугой  равный сферическому углу на этой же сфере, в
равный сферическому углу на этой же сфере, в
который нужно вернуть дугу ВР до совпадения с дугой  то есть
то есть  (рис. 5.1). Итак, конечное перемещение тела при сферическом движении можно осуществить одним поворотом вокруг оси ОВ на угол
(рис. 5.1). Итак, конечное перемещение тела при сферическом движении можно осуществить одним поворотом вокруг оси ОВ на угол  Ось ОР называется осью конечного поворота. Теорема доказана.
Ось ОР называется осью конечного поворота. Теорема доказана.
Мгновенная ось вращения. Аксоиды
Очевидно, что перемещение твердого тела, имеющего неподвижную точку, с положения, которое оно занимает в момент времени t, в положение, соответствующее моменту времени  одним вращением вокруг оси конечного поворота на угол
одним вращением вокруг оси конечного поворота на угол  в целом не соответствует действительному движению тела за этот промежуток времени. Однако, чем меньше будет промежуток времени
в целом не соответствует действительному движению тела за этот промежуток времени. Однако, чем меньше будет промежуток времени  тем перемещения, которое осуществляется вращением вокруг оси конечного поворота на угол
тем перемещения, которое осуществляется вращением вокруг оси конечного поворота на угол  будет ближе к настоящему движению тела.
будет ближе к настоящему движению тела.
При приближении  к нулю второе положение тела приближается к первому, а ось конечного поворота ОР приближается к своему предельному положению
к нулю второе положение тела приближается к первому, а ось конечного поворота ОР приближается к своему предельному положению  и называется мгновенной осью вращения тела.
и называется мгновенной осью вращения тела.
Иначе говоря: ось, вокруг которой нужно вращать тело, имеющее одну неподвижную точку, при перемещении его с одного положения в другое, бесконечно близкое к первому, называется мгновенной осью вращения для конкретного момента времени.
Мгновенная ось вращения — это геометрическое место точек тела, скорости которых в конкретный момент равны нулю. Положение мгновенной оси вращения не остается неизменным за сферического движения тела, а со временем меняет свое положение в пространстве. Геометрическое место мгновенных осей относительно неподвижной системы отсчета, относительно которой рассматривается движение тела, называется недвижимым аксоидом (поверхность и на рис. 5.2).
Неподвижный аксоид является конической поверхностью с вершиной в неподвижной
точке О, поскольку все мгновенные оси вращения проходят через эту неподвижную точку.
Геометрическое место мгновенных осей в самом подвижном теле называется подвижным аксоидом (поверхность ИИ на рис. 5.2).

Движимый аксоид есть также конической поверхностью с вершиной в неподвижной точке О.Во время сферического движения тела движимый аксоид  катится без скольжения по неподвижному
катится без скольжения по неподвижному  Очевидно, что во время плоского движения твердого тела конические аксоиды есть цилиндрическими поверхностями, которые в пересечении с плоскостями движения плоской фигуры образуют центроиды для этой фигуры.
Очевидно, что во время плоского движения твердого тела конические аксоиды есть цилиндрическими поверхностями, которые в пересечении с плоскостями движения плоской фигуры образуют центроиды для этой фигуры.
Практически понятие аксоидов используется для классификации видов
прецессионного движения гироскопов.
Угловая скорость и угловое ускорение твердого тела во время сферического движения
Из теоремы Эйлера-Даламбера следует, что сферическое движение твердого тела в каждый момент времени является вращательным вокруг мгновенной оси, а потому
величинами, которые характеризуют сферическое движение тела в каждый момент
времени, будут мгновенная угловая скорость и мгновенное угловое ускорение тела.
Если за промежуток времени  тело вернулось вокруг мгновенной оси на угол
тело вернулось вокруг мгновенной оси на угол  то граница, к которой приближается отношение
то граница, к которой приближается отношение когда
когда  стремится к нулю, называется мгновенной угловой скоростью твердого тела в момент времени t
стремится к нулю, называется мгновенной угловой скоростью твердого тела в момент времени t

При этом нужно иметь в виду, что величина  не является производной от угла
не является производной от угла  по времени t, поскольку во время движения твердого тела вокруг неподвижной точки такого угла не существует. Поэтому мгновенную угловую скорость
по времени t, поскольку во время движения твердого тела вокруг неподвижной точки такого угла не существует. Поэтому мгновенную угловую скорость  нужно задать как функцию времени непосредственно или ее можно представить так, как это будет показано ниже, через углы Эйлера и их производные.
нужно задать как функцию времени непосредственно или ее можно представить так, как это будет показано ниже, через углы Эйлера и их производные.
Вектор мгновенной угловой скорости  направляется вдоль мгновенной оси вращения
направляется вдоль мгновенной оси вращения  в ту сторону, чтобы с конца этого вектора мгновенный поворот тела было видно против часовой стрелки (рис. 5.3).
в ту сторону, чтобы с конца этого вектора мгновенный поворот тела было видно против часовой стрелки (рис. 5.3).

Угловое ускорение тела во время сферического движения характеризует скорость изменения со временем вектора угловой скорости по величине и направлению. Вектор углового ускорения равен первой производной за временем от вектора угловой скорости

Вектор углового ускорения  направляется по касательной к годографу вектора угловой скорости в сторону движения конца вектора
направляется по касательной к годографу вектора угловой скорости в сторону движения конца вектора  (рис. 5.3).
(рис. 5.3).
Договоримся вектор углового ускорения  проводить с неподвижной точки О.
проводить с неподвижной точки О.
Вычисление углового ускорения тела
Существует два основных способа нахождения вектора углового ускорения тела во время сферического движения. Один из них — аналитический, который рассмотрим в § 5.2, базируется на углах Эйлера. В этом параграфе рассмотрим второй способ, который использует расписание вектора углового ускорения  на две взаимно перпендикулярные составляющие.
на две взаимно перпендикулярные составляющие.
Пусть тело совершает сферический движение и в заданный момент времени имеет угловую скорость  (рис. 5.4).
(рис. 5.4).
Если ввести единичный вектор направленный по
направленный по 
Тогда или
или
Составляющая  полного углового ускорения
полного углового ускорения  характеризует изменение вектора угловой скорости по величине. Вектор
характеризует изменение вектора угловой скорости по величине. Вектор  совпадает по направлению с вектором
совпадает по направлению с вектором  и противоположно направленный к нему при
и противоположно направленный к нему при
Составляющая  полного углового ускорения
полного углового ускорения  характеризует изменение вектора угловой скорости по направлению.
характеризует изменение вектора угловой скорости по направлению.
Производная  равна скорости конца вектора
равна скорости конца вектора  то есть линейной скорости точки А. Если допустить, что мгновенная ось вращается в заданный момент времени вокруг оси
то есть линейной скорости точки А. Если допустить, что мгновенная ось вращается в заданный момент времени вокруг оси  с угловой скоростью
с угловой скоростью  (рис. 5.4), то линейная скорость точки А по формуле Эйлера равна
(рис. 5.4), то линейная скорость точки А по формуле Эйлера равна


Составляющая углового ускорения  с учетом последнего равенства примет вид
с учетом последнего равенства примет вид

Вектор  напрямляеться согласно правилу векторного произведения векторов
напрямляеться согласно правилу векторного произведения векторов  и
и  и всегда будет перпендикулярен к вектору
и всегда будет перпендикулярен к вектору  Модуль вектора ускорения
Модуль вектора ускорения  равен
равен 
В частном случае, когда угловая скорость тела при сферическом движении постоянная по величине  то
то

Скорость и ускорение точек твердого тела во время сферического движения
Поскольку в каждый момент времени тело, которое движется вокруг неподвижной точки, имеет мгновенную ось вращения  вокруг которой проходит элементарный поворот с угловой скоростью
вокруг которой проходит элементарный поворот с угловой скоростью (рис. 5.5), то вектор скорости любой точки М тела будет определяться в этот момент по известной формуле Эйлера (3.17), т.е.
(рис. 5.5), то вектор скорости любой точки М тела будет определяться в этот момент по известной формуле Эйлера (3.17), т.е.

где  радиус-вектор, проведенный в точку М с неподвижной точки О. Направление вектора
радиус-вектор, проведенный в точку М с неподвижной точки О. Направление вектора  скорости точки М будет перпендикулярен плоскости
скорости точки М будет перпендикулярен плоскости  и направлен в сторону мгновенного вращения тела. модуль вектора скорости точки равен
и направлен в сторону мгновенного вращения тела. модуль вектора скорости точки равен



Размер  — это короткое расстояние от точки М к мгновенной оси вращения. Для определения ускорения произвольной точки тела в случае его сферического движения будем считать известными в заданный момент времени угловую скорость
— это короткое расстояние от точки М к мгновенной оси вращения. Для определения ускорения произвольной точки тела в случае его сферического движения будем считать известными в заданный момент времени угловую скорость  и угловое ускорение
и угловое ускорение  (Рис. 5.6). Ускорение точки равно первой производной по времени от вектора скорости, а потому, дифференцируя равенство (5.5), получим
(Рис. 5.6). Ускорение точки равно первой производной по времени от вектора скорости, а потому, дифференцируя равенство (5.5), получим

или с учетом, что получим выражение для нахождения
получим выражение для нахождения
ускорения точек тела в случае сферического движения:
Тут  вращательное ускорение точки;
вращательное ускорение точки;
 осевое ускорение точки.
осевое ускорение точки.
Итак,
Равенство (5.8) выражает теорему Ривальса об ускорении точки тела, осуществляет сферический движение, которая формулируется так: ускорение любой точки твердого тела в случае сферического движения равна векторной сумме вращательного и доосевого ускоренния.
Вектор вращательного ускорения напрямляеться согласно правилу векторного произведения, то есть перпендикулярно к плоскости, в которой лежат векторы
напрямляеться согласно правилу векторного произведения, то есть перпендикулярно к плоскости, в которой лежат векторы  и
и  в ту сторону, откуда кратчайший поворот вектора
в ту сторону, откуда кратчайший поворот вектора  вектору
вектору  видно против часовой стрелки. Модуль вращательного ускорения
видно против часовой стрелки. Модуль вращательного ускорения

где  короткое расстояние от точки М до прямой, вдоль которой направлен вектор углового ускорения
короткое расстояние от точки М до прямой, вдоль которой направлен вектор углового ускорения  (рис. 5.6).
(рис. 5.6).
Вектор доосевого ускорения  напрямляеться перпендикулярно векторам угловой скорости
напрямляеться перпендикулярно векторам угловой скорости  и линейной скорости
и линейной скорости  точки М, то есть вдоль перпендикуляра, опущенного из точки М на мгновенную ось
точки М, то есть вдоль перпендикуляра, опущенного из точки М на мгновенную ось в сторону этой оси (рис. 5.6).
в сторону этой оси (рис. 5.6).
Модуль доосевого ускорения

Модуль полного ускорения  вычисляется как диагональ параллелограмма по формуле
вычисляется как диагональ параллелограмма по формуле

Исследование сферического движения твердого тела методом углов Эйлера
В предыдущем параграфе исследованы движение твердого тела с неподвижной точкой геометрическим методом (методом мгновенной оси). Ниже рассмотрим аналитический метод исследования кинематики сферического движения тела, основанный на углах Эйлера.
Углы Эйлера. Уравнения сферического движения твердого тела
Как уже отмечалось в 5.1.1, положения твердого тела в пространстве определяется тремя точками, не лежащих на одной прямой, то есть девятью координатами этих точек. Положение всех остальных точек тела можно найти через заданные три точки. В твердом теле расстояние между отдельными точками тела не меняется, а потому координаты этих трех заданных точек должны удовлетворять трем уравнениям, которые выражают неизменность расстояний между отдельными точками тела. В случае свободного твердого тела остается шесть независимых координат, то есть свободное тело имеет шесть
степеней свободы.
В случае сферического движения тела одна точка закреплена, а следовательно, число независимых величин уменьшается до трех, то есть тело при таком движении имеет три степени свободы.
Три степени свободы, которыми тело в случае сферического движения, требуют для определения положения тела относительно произвольной системы координат трех независимых величин. Эти величины можно задать разными способами. В теоретической механике наибольшее применение получили углы Эйлера.
Через неподвижную точку О твердого тела проведем оси неподвижной декартовой системы координат по которой будем рассматривать движение тела (Рис. 5.7).
по которой будем рассматривать движение тела (Рис. 5.7).
Подвижную декартову систему координат неизменно свяжем с телом, которое вращается вокруг неподвижной точки О. Положение тела относительно неподвижной системы координат
неизменно свяжем с телом, которое вращается вокруг неподвижной точки О. Положение тела относительно неподвижной системы координат  определяется положением подвижной системы координат
определяется положением подвижной системы координат  относительно неподвижной.
относительно неподвижной.

Взаимное положение этих систем определяется углами Эйлера. Дадим определение углов
Эйлера.
Линия пересечения ON неподвижной плоскости  с подвижной плоскостью
с подвижной плоскостью  называется линией узлов. Угол
называется линией узлов. Угол  между неподвижной осью
между неподвижной осью  и линией узлов ОN называется углом прецессии.
и линией узлов ОN называется углом прецессии.
Для изменения этого угла тело должно вращаться вокруг оси  которая называется осью прецессии.
которая называется осью прецессии.
Следующим углом Эйлера является угол между координатными плоскостями  и
и  который измеряется линейным углом
который измеряется линейным углом  между перпендикулярами к этих координатным плоскостям, то есть углом между осями
между перпендикулярами к этих координатным плоскостям, то есть углом между осями  и
и  Угол называется углом нутации, а линия узлов ON, вокруг которой вращается тело при изменении угла имеет еще название оси нутации.
Угол называется углом нутации, а линия узлов ON, вокруг которой вращается тело при изменении угла имеет еще название оси нутации.
Для полного определения положения подвижной системы координат относительно неподвижной нужно задать угол между линией узлов и подвижной осью  Угол φ между линией узлов ON и осью
Угол φ между линией узлов ON и осью  называется углом собственного вращения. Для изменения угла φ тело должно вращаться вокруг оси
называется углом собственного вращения. Для изменения угла φ тело должно вращаться вокруг оси  которая носит название оси собственного вращения.
которая носит название оси собственного вращения.
Углы Эйлера положительные, когда они отложены по осям и ON против часовой стрелки, если смотреть с концов соответственно осей
и ON против часовой стрелки, если смотреть с концов соответственно осей 
 и
и  Положительные направления отчисления этих углов показаны на рис. 5.7 дуговыми стрелками.
Положительные направления отчисления этих углов показаны на рис. 5.7 дуговыми стрелками.
Во время движения тела с одной закрепленной точкой углы  непрерывно изменяются, то есть функциями времени
непрерывно изменяются, то есть функциями времени

Эти уравнения называются уравнениями сферического движения тела.
Заметим, что описанный вариант выбора углов  не единственный.
не единственный.
Существуют их модификации. Так при исследовании динамики кораблей и самолетов
используют углы Эйлера-Крылова.
Определение угловой скорости и углового ускорения тела по уравнениям его движения
Пусть сферическое движение тела описывается уравнениями (5.12). вычислим величину и направление угловой скорости тела в произвольный момент времени, как функцию углов Эйлера и их производных.
В случае изменения угла тело вращается вокруг оси
тело вращается вокруг оси  (прецессия) с угловой скоростью
(прецессия) с угловой скоростью при изменении угла
при изменении угла  — вокруг линии узлов ON (нутация) с угловой скоростью
— вокруг линии узлов ON (нутация) с угловой скоростью  и при изменении угла φ — вокруг оси
и при изменении угла φ — вокруг оси  (собственное вращение) с угловой скоростью
(собственное вращение) с угловой скоростью  Направления векторов
Направления векторов  показаны на рис. 5.8
показаны на рис. 5.8
Как будет показано в разделе 8, при вращении тела вокруг нескольких осей, пересекающихся результирующее движение будет мгновенно-вращательным с угловой скоростью, равной геометрической сумме составляющих угловых скоростей. В случае сферического движения тела вектор результирующей мгновенной угловой скорости равен

Для нахождения величины и направления вектора мгновенной угловой скорости определим его проекции на оси подвижной системы координат
определим его проекции на оси подвижной системы координат 
Проектируя обе части равенства (5.13) на оси  получим:
получим:

Проекции векторов  и
и  находим непосредственным проектированием (Рис. 5.8):
находим непосредственным проектированием (Рис. 5.8):

а для нахождения проекций вектора  проведем через оси
проведем через оси  и
и плоскость,которая пересекается с плоскостью
плоскость,которая пересекается с плоскостью  вдоль линии OL. Поскольку линия узлов ON перпендикулярна к плоскости
вдоль линии OL. Поскольку линия узлов ON перпендикулярна к плоскости  то она перпендикулярна и к линии
то она перпендикулярна и к линии  Тогда, проектируя вектор
Тогда, проектируя вектор  на линию OL, а полученную проекцию, в свою очередь, на оси
на линию OL, а полученную проекцию, в свою очередь, на оси  и
и получим:
получим:

Подставим полученные величины проекций в правые части равенств (5.14):
Аналогично, проектируя равенство (5.13) на оси неподвижной системы координат  найдем проекции вектора
найдем проекции вектора  на эти оси:
на эти оси:

Равенства (5.15) и (5.16) называются кинематическими уравнениями Эйлера. Эти уравнения дают возможность найти модуль мгновенной угловой скорости и направляющие косинусы вектора  с соответствующими осями координат:
с соответствующими осями координат:


Модуль и направляющие косинусы вектора углового ускорения также определим по его проекциями на неподвижные и подвижные оси координат.
Найдем проекции вектора углового ускорения на неподвижные оси координат  Раскладывая векторы угловой скорости
Раскладывая векторы угловой скорости  и углового ускорения
и углового ускорения  по ортах неподвижной системы координат, получим
по ортах неподвижной системы координат, получим

Дифференцируя первое равенство (5.18) с учетом, что векторы постоянные по величине и направлению, найдем
постоянные по величине и направлению, найдем

Сравнивая (5.19) с другим равенством (5.18), находим
то есть проекция углового ускорения на неподвижную ось декартовой системы координат равна производной по времени от проекции угловой скорости на соответствующую ось.
Определим проекции углового ускорения на движущиеся оси координат  связанные с твердым телом.
связанные с твердым телом.
Единичные векторы подвижной системы координат обозначим через
 (рис. 5.8). Эти орты меняются по направлению, то есть вращаются вместе с телом вокруг мгновенной оси с угловой скоростью
(рис. 5.8). Эти орты меняются по направлению, то есть вращаются вместе с телом вокруг мгновенной оси с угловой скоростью  Поэтому производные по времени от этих ортов являются скорости концов этих ортов, которые определяются по формулах.
Поэтому производные по времени от этих ортов являются скорости концов этих ортов, которые определяются по формулах.

Разложим векторы угловой скорости  и углового ускорения
и углового ускорения  по ортах
по ортах 

Вектор углового ускорения, как производная по времени от вектора угловой скорости, равна

Второе слагаемое полученной зависимости с учетом (5.21) преобразуется 
Угловое ускорение  с учетом последней тождества будет считаться равенством
с учетом последней тождества будет считаться равенством
Сравнивая выражения (5.22) и (5.23), находим проекции вектора углового ускорения на оси подвижной системы координат

то есть, проекции углового ускорения на движущиеся оси декартовой системы координат равны производным по времени от проекций угловой скорости на соответствующие подвижные оси. Модуль мгновенного углового ускорения и направляющие косинусы вектора  с соответствующими осями координат находятся по формулам
с соответствующими осями координат находятся по формулам

Аналитическое нахождения скоростей точек тела при сферическом движении. Уравнения мгновенной оси вращения
Пусть движение тела, имеющего одну неподвижную точку, задано уравнениями (5.12).
Найдем скорость произвольной точки М (рис. 5.8). если координаты точки  и проекции вектора угловой скорости
и проекции вектора угловой скорости  заданные в неподвижной системе координат, то скорость точки М, выражается по формуле (5.5), может также быть представлена определителем
заданные в неподвижной системе координат, то скорость точки М, выражается по формуле (5.5), может также быть представлена определителем
С другой стороны вектор скорости точки можно представить через его проекции на неподвижные оси координат

Приравнивая соответствующие компоненты в различных представлениях вектора
скорости  получим проекции вектора скорости точки тела во время сферического движения на оси неподвижной системы координат:
получим проекции вектора скорости точки тела во время сферического движения на оси неподвижной системы координат: 
Каждую из формул (5.26) можно получить из предыдущей циклической перестановкой букв  Формулы (5.26), как и формула (5.5), называются формулами Эйлера.
Формулы (5.26), как и формула (5.5), называются формулами Эйлера.
Если координаты точки  и проекции вектора угловой скорости
и проекции вектора угловой скорости  Заданные в подвижной системе координат
Заданные в подвижной системе координат  то, аналогично предыдущему, получим проекции вектора скорости точки и на оси подвижной системы координат:
то, аналогично предыдущему, получим проекции вектора скорости точки и на оси подвижной системы координат:

Модуль и направляющие косинусы вектора скорости произвольной точки тела во время сферического движения найдем по формулам:
По найденным проекциям скоростей точек тела во время его сферического движения можно найти уравнения мгновенной оси вращения.
Скорость каждой точки на мгновенной оси вращения в данный момент времени равна нулю, то есть  Учитывая это, из формул (5.26) получим
Учитывая это, из формул (5.26) получим

Откуда  или
или
Уравнение (5.29) является уравнением мгновенной оси вращения тела, имеющего одну
неподвижную точку, в неподвижной системе координат, то есть уравнением мгновенной
оси вращения тела во время сферического движения.
Аналогичным методом выводится уравнение мгновенной оси вращения в подвижной системе координат, которое будет иметь вид

Аналитическое нахождения ускоренний точек тела при сферическом движении
Согласно теореме Ривальса, ускорения произвольной точки тела в случае сферического движения определяется по формуле (5.8), то есть

Раскрывая второе слагаемое последнего равенства как двойное векторное произведение, то есть получим вектор ускорения точки в виде
получим вектор ускорения точки в виде
Найдем проекции вектора ускорения  на оси неподвижной и подвижной систем координат. Если ввести единичные орты неподвижной системы
на оси неподвижной и подвижной систем координат. Если ввести единичные орты неподвижной системы  а проекции вектора ускорения
а проекции вектора ускорения  обозначить через
обозначить через 
 то (5.31) можно представить следующим образом
то (5.31) можно представить следующим образом

Приравнивая соответствующие компоненты при  в полученной равенства слева и справа, получаем
в полученной равенства слева и справа, получаем

Формулы (5.32) определяют проекции вектора ускорения точки тела на оси неподвижной системы координат 
Аналогично находят проекции вектора ускорения  точки тела и на оси подвижной системы координат
точки тела и на оси подвижной системы координат 

Модуль вектора ускорения точки и его направляющие косинусы с соответствующими осями координат вычисляются по формулам:
Примеры решения задач на нахождение кинематических характеристик сферического движения тела
Задача 5.1. Конус с углом при вершине и радиусом основания
и радиусом основания  (рис. 5.9) катится по неподвижной горизонтальной плоскости без скольжения так, что его вершина В остается неподвижной, а центр основы С движется с постоянной скоростью
(рис. 5.9) катится по неподвижной горизонтальной плоскости без скольжения так, что его вершина В остается неподвижной, а центр основы С движется с постоянной скоростью  Определить угловую скорость и угловое ускорение конуса, скорость и ускорение точек А и B — концов диаметра АВ, которые занимают в заданный момент времени высокое и низкое положение.
Определить угловую скорость и угловое ускорение конуса, скорость и ускорение точек А и B — концов диаметра АВ, которые занимают в заданный момент времени высокое и низкое положение.

Решение. Конус находится в сферическом движении, поскольку точка О остается неподвижной. Для решения этой задачи можно использовать оба предложены методы исследования кинематики сферического движения тела. Проиллюстрируем их на этой задачи.
а) Метод мгновенных осей
По условию задачи конус катится без скольжения, поэтому мгновенной осью вращения  будет линия ОА контакта конуса с неподвижной плоскостью (рис. 5.10).
будет линия ОА контакта конуса с неподвижной плоскостью (рис. 5.10).

Скорость точки С можно найти по формуле (5.6)

С треугольника АСК

Тогда

Вектор угловой скорости  будет направлен по оси
будет направлен по оси  как показано на рисунке. Точка А лежит на мгновенной оси вращения, поэтому
как показано на рисунке. Точка А лежит на мгновенной оси вращения, поэтому 
Определим скорость точки В:

Поскольку центр конуса движется с постоянной линейной скоростью, то величина угловой скорости конуса  постоянна, и угловое ускорение
постоянна, и угловое ускорение  определяется по формуле (5.4)
определяется по формуле (5.4)
Найдем предварительно угловую скорость  вращения мгновенной оси
вращения мгновенной оси 
В случае качения конуса без скольжения мгновенная ось вращения  и собственная ось конуса ОС вращаются вокруг прямой ВО с одинаковой угловой скоростью
и собственная ось конуса ОС вращаются вокруг прямой ВО с одинаковой угловой скоростью  Вычисляя скорость точки С как вращательное вокруг оси
Вычисляя скорость точки С как вращательное вокруг оси  получим:
получим:

откуда
Вектор  направлен вдоль прямой ВО, как показано на рис. 5.10.
направлен вдоль прямой ВО, как показано на рис. 5.10.
Тогда

Вектор  перпендикулярен к векторам
перпендикулярен к векторам  и
и  и показан на рисунке 5.10.
и показан на рисунке 5.10.
Переходим к определению ускоренний точек А и В, воспользовавшись зависимостями (5.8), (5.9) и (5.10):


Векторы вращательного  и доосевого
и доосевого  ускоренний точки В показаны на рис. 5.10. Эти векторы взаимно перпендикулярны, а потому
ускоренний точки В показаны на рис. 5.10. Эти векторы взаимно перпендикулярны, а потому
б) Метод углов Эйлера
Для решения задачи этим методом нужно выбрать оси подвижной и неподвижной систем координат и вывести уравнение движения конуса. оси неподвижной системы координат  выбираем как показано на рис. 5.11.
выбираем как показано на рис. 5.11.
Исходное положение конуса выбираем так, чтобы диаметр АВ лежал в вертикальной плоскости  а точки А и В занимали соответственно низкое и высокое положение.
а точки А и В занимали соответственно низкое и высокое положение.
Подвижную ось  (ось собственного вращения) направим по оси конуса.
(ось собственного вращения) направим по оси конуса.
В начальный момент времени ось  совпадает с осью
совпадает с осью  а ось
а ось лежит в плоскости
лежит в плоскости  и перпендикулярна к осям
и перпендикулярна к осям  и
и
При выводе уравнений движения тела, вращающегося вокруг неподвижной точки, нужно иметь в виду, что Эйлеру углы независимые между собой тогда, когда тело имеет единую вязь в виде неподвижной точки О.

Если, кроме точечной связи, на тело наложены другие связи, то Эйлеру углы становятся зависимыми между собой.
В данной задачи конус катится по плоскости без скольжения. Поэтому дополнительными связями является плоскость, по которой катится конус, и условие движения без скольжения. При таком движения конуса угол нутации остается постоянным, а вращения тела вокруг собственной оси будет зависеть от его прецессионного движения. Свяжем угловые скорости прецессионного движения
остается постоянным, а вращения тела вокруг собственной оси будет зависеть от его прецессионного движения. Свяжем угловые скорости прецессионного движения  и собственного вращения
и собственного вращения  со скоростью центра конуса
со скоростью центра конуса При условии, что задано скорость центра основания конуса
При условии, что задано скорость центра основания конуса  можно найти эти угловые скорости и их направления, то есть направления вращения конуса вокруг оси прецессии
можно найти эти угловые скорости и их направления, то есть направления вращения конуса вокруг оси прецессии  и оси собственного вращения
и оси собственного вращения 
Точка С движется по кругу, а потому

Поскольку  то угловая скорость
то угловая скорость  Направление прецессионного движения показано на рис. 5.11. Как алгебраическая величина,
Направление прецессионного движения показано на рис. 5.11. Как алгебраическая величина, 
Скорость точки А, лежащей в данный момент времени в плоскости контакта, равна нулю. С другой стороны,
 откуда
откуда

Направление  показано на рис. 5.11. угловая скорость собственного вращения
показано на рис. 5.11. угловая скорость собственного вращения  также будет постоянной.
также будет постоянной.
Покажем тело в произвольный момент времени и установим закон его движения.
Из построения углов Эйлера следует, что линия узлов ON лежит в горизонтальной
плоскости и перпендикулярна осям  и
и  (рис. 5.12). Угол нутации
(рис. 5.12). Угол нутации  — это угол между
— это угол между
плоскостями  и
и  то есть угол между осями
то есть угол между осями  и
и  который в нашей задачи будет постоянным
который в нашей задачи будет постоянным
Направления изменения углов φ и ψ показаны на рис. 5.12 дуговыми стрелками.
По правилу выбора положительных направлений углов Эйлера (§ 5.2, 5.2.1) имеем
Как было отмечено выше, прецессионного движение и собственное вращение происходят с постоянными угловыми скоростями, поэтому:

Поскольку при (рис. 5.11), так и
(рис. 5.11), так и  а закон движения конуса приобретает вид:
а закон движения конуса приобретает вид:

По известным формулам (5.16), (5.17), (5.20), (5.25) находим проекции векторов угловой скорости и углового ускорения на оси неподвижной системы координат, а также их модули:

Векторы и
и  по величине не зависят от времени. Направление этих векторов найдем для начального положения конуса, то есть при
по величине не зависят от времени. Направление этих векторов найдем для начального положения конуса, то есть при (рис. 5.11).
(рис. 5.11).
При 

тогда 
Из результатов вычислений (г) видно, что вектор  перпендикулярен осям
перпендикулярен осям  и
и  и направлен вдоль положительного направления оси
и направлен вдоль положительного направления оси а вектор углового ускорения
а вектор углового ускорения 
перпендикулярно к осям  и
и  и направленный вдоль оси
и направленный вдоль оси (рис. 5.11).
(рис. 5.11).
Для определения скоростей точек А и В используем формулы (5.26) и (5.27). Находим координаты точек А и В при 
 или с учетом того, что
или с учетом того, что получим:
получим:
Тогда:

Следовательно, скорость точки А равна нулю.
Аналогично находим скорость точки В:

Скорость точки В равна  и вектор
и вектор  направлен вдоль положительного направления оси
направлен вдоль положительного направления оси  (рис. 5.11).
(рис. 5.11).
Для нахождения ускоренний точек А и В используем формулы (5.32), (5.33), (5.34) и известные величины (в) и (г).
Получим:

Ускорение точки А равно  и вектор этого ускорения направлен по положительном направлении оси
и вектор этого ускорения направлен по положительном направлении оси 
Аналогично находим ускорение точки В:

Вектор ускорения  точки В лежит в плоскости
точки В лежит в плоскости  и образует с положительными направлениями осей
и образует с положительными направлениями осей  и
и  одинаковые углы, равные
одинаковые углы, равные 
Результаты расчетов, полученные двумя методами, совпадают.
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Содержание:
Аналитическая геометрия
В этой главе все геометрические объекты мы будем определять и изучать с помощью соответствующих уравнений этих объектов и, следовательно, в принципе геометрия может быть изложена без единого чертежа. И, действительно, все чертежи, которые мы будем использовать, будут служить лишь для визуальной иллюстрации наших рассуждений.
Уравнение поверхности в выбранной декартовой системе координат 
т. е. в виде связи или зависимости между координатами х, у, z произвольной точки поверхно-аналогично, уравнение
определяет некоторую линию (кривую) в системе координат  на плоскости.
на плоскости.
Кривая в пространстве может быть задана как пересечение двух поверхностей и, следовательно, она определяется системой из уравнений этих поверхностей:
Кроме того, кривую на плоскости или в пространстве можно также задать с помощью зависимостей координат произвольной то’жи этой кривой от некоторого параметра, т. е. с помощью параметрических уравнений:
где t — действительный параметр.
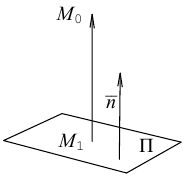
Плоскость в пространстве. Различные виды уравнения плоскости
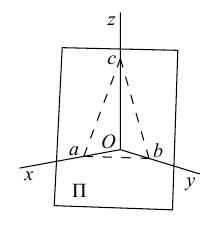
Найдем уравнение плоскости в пространстве с выбранной в нем декартовой системой координат . Будем исходить из того, что положение этой плоскости полностью определяется точкой  . через которую проходит плоскость и ненулевым вектором
. через которую проходит плоскость и ненулевым вектором  . ей перпендикулярным. Вектор
. ей перпендикулярным. Вектор  называется нормальным вектором плоскости.
называется нормальным вектором плоскости.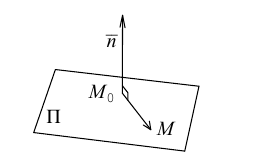
Пусть  — произвольная точка плоскости П. Тогда вектор
— произвольная точка плоскости П. Тогда вектор  ортогонален вектору
ортогонален вектору  и, следовательно,
и, следовательно,
или, учитывая, что  запишем в координатах уравнение плоскости П :
запишем в координатах уравнение плоскости П :

Преобразовав полученное уравнение к виду

мы получим тем самым общее уравнение плоскости.
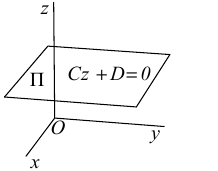
Рассмотрим теперь некоторые частные случаи общего уравнения плоскости. Если в общем уравнении плоскости отсутствует, одна из координат, то нормальный вектор  этой плоскости перпендикулярен соответствующей координатной оси и, следовательно, плоскость расположена параллельно этой координатной оси.
этой плоскости перпендикулярен соответствующей координатной оси и, следовательно, плоскость расположена параллельно этой координатной оси.
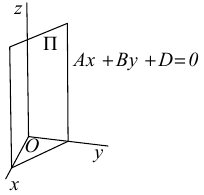
Аналогично, если в общем уравнении плоскости отсутствуют две координаты, то нормальный вектор данной плоскости перпендикулярен соответствующей координатной плоскости и, значит, плоскость расположена параллельно этой координатной плоскости.
Научимся теперь находить уравнение плоскости по трем элементам.
1) Плоскость, проходящая через точку, параллельно двум векторам.
Пусть плоскость  проходит через точку
проходит через точку  параллельно неколлинеарным векторам
параллельно неколлинеарным векторам  .
.
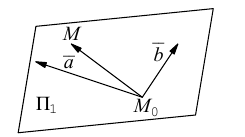
Обозначим через  произвольную точку плоскости
произвольную точку плоскости  Для точек данной плоскости и только для них три вектора
Для точек данной плоскости и только для них три вектора  компланарны и, следовательно (глава II, §5, теорема), их смешанное произведение равно нулю, т. е.
компланарны и, следовательно (глава II, §5, теорема), их смешанное произведение равно нулю, т. е.

Раскрыв определитель (проще всего, разлагая его по первой строке), получим общее уравнение плоскости 
2)Плоскость, проходящая через две точки, параллельно вектору.
Найдем уравнение плоскости  , проходящей через две точки
, проходящей через две точки  , параллельно ненулевому вектору
, параллельно ненулевому вектору  . Задача сводится к предыдущей, если положить, например,
. Задача сводится к предыдущей, если положить, например,  Тогда
Тогда
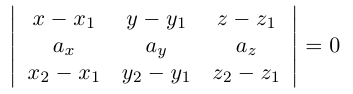
— искомое уравнение плоскости 
3)Плоскость, проходящая через три точки.
Если плоскость  проходит через три точки
проходит через три точки  , не лежащие на одной прямой, то ее уравнение можно найти, как и в случае 1). положив например,
, не лежащие на одной прямой, то ее уравнение можно найти, как и в случае 1). положив например,  Следовательно, уравнение плоскости
Следовательно, уравнение плоскости  записать в виде:
записать в виде:
Замечание. Во всех трех случаях уравнение плоскости можно найти, вычислив предварительно ее нормальный вектор. Например, в первом случае в качестве нормального вектора можно взять векторное произведение  Тогда
Тогда  — уравнение плоскости.
— уравнение плоскости.
Пример №1
Найти уравнение плоскости 11 ^ — перпендикулярной плоскости

параллельной вектору  и проходящей через точку пересечения плоскости
и проходящей через точку пересечения плоскости  с координатного осью
с координатного осью 
Решение. Из уравнения плоскости  находим у = — 2. Следовательно, плоскость
находим у = — 2. Следовательно, плоскость  проходит через точку
проходит через точку  Кроме того,
Кроме того,  , поэтому нормальный вектор
, поэтому нормальный вектор  плоскости
плоскости  параллелен плоскости
параллелен плоскости  . Осталось записать искомое уравнение по трем элементам: точке
. Осталось записать искомое уравнение по трем элементам: точке  и векторам
и векторам  . Имеем:
. Имеем:

Таким образом, общее уравнение плоскости  имеет вид:
имеет вид:

Пусть плоскость  не проходит через начало координат и не параллельна ни одной из координатных осей. Тогда, очевидно, все числа A, В, С, D отличны от нуля.
не проходит через начало координат и не параллельна ни одной из координатных осей. Тогда, очевидно, все числа A, В, С, D отличны от нуля.
Разделив обе части уравнения плоскости на число D. мы можем записать его в виде:
Числа а, b, с представляют собой величины отрезков, которые плоскость П отсекает на координатных осях. Полученное уравнение называется уравнением плоскости в отрезках.
Найдем теперь формулу для вычисления расстояния от точки  до плоскости
до плоскости 
Обозначим искомое расстояние через . Очевидно.
. Очевидно. , где точка
, где точка  — основание перпендикуляра, опущенного из точки
— основание перпендикуляра, опущенного из точки  на плоскость П. Вычислим скалярное произведение коллинеарных векторов
на плоскость П. Вычислим скалярное произведение коллинеарных векторов  . С одной стороны,
. С одной стороны,

С другой,

так как  и поэтому
и поэтому  Следовательно, расстояние от точки
Следовательно, расстояние от точки  до плоскости П вычисляется по формуле:
до плоскости П вычисляется по формуле:

В заключение этого параграфа выясним характер взаимного расположения двух плоскостей. Пусть плоскости заданы своими общими уравнениями:
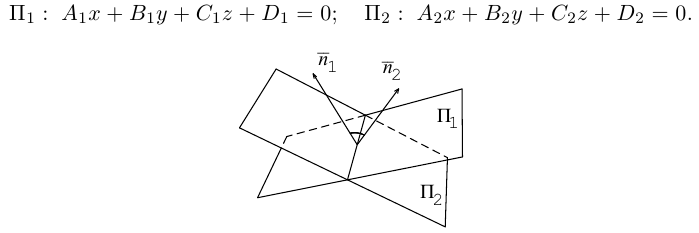
Очевидно, что угол  между этими плоскостями равен углу между их нормальными векторами
между этими плоскостями равен углу между их нормальными векторами  и, следовательно,
и, следовательно,
В частности,

Пример №2
Убедиться в том, что плоскость отсекающая на координатных осях
отсекающая на координатных осях  отрезки величиной 2, —1, 2 соответственно и плоскость
отрезки величиной 2, —1, 2 соответственно и плоскость

параллельны и найти расстояние между ними.
Решение. Запишем уравнение плоскости II| в отрезках:
Преобразовав его к общему виду, получим:

Так как нормальные векторы  плоскостей
плоскостей  коллинеарны. то эти плоскости параллельны. Возьмем какую-нибудь точку в плоскости
коллинеарны. то эти плоскости параллельны. Возьмем какую-нибудь точку в плоскости  например,
например,  . Тогда
. Тогда

Уравнения прямой в пространстве
Пусть прямая L в пространстве с декартовой системой координат  проходит через точку
проходит через точку  и параллельна ненулевому вектору
и параллельна ненулевому вектору , который называется направляющим вектором прямой.
, который называется направляющим вектором прямой.
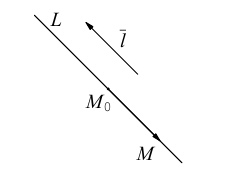
Обозначим через  произвольную точку прямой L. Вектор
произвольную точку прямой L. Вектор  коллинеарен вектору
коллинеарен вектору  и, следовательно, их координаты пропорциональны, т. е.
и, следовательно, их координаты пропорциональны, т. е.
Эта двойная пропорция представляет собой канонические уравнения прямой в пространстве.
Заметим, что в канонических уравнениях прямой формально допускается запись нулей в знаменателях, это означает лишь то, что прямая перпендикулярна соответствующей координатной оси или координатной плоскости.
Если прямая проходит через две точки  , то в качестве ее направляющего вектора можно взять вектор
, то в качестве ее направляющего вектора можно взять вектор  и, следовательно, канонические уравнения этой прямой имеют вид:
и, следовательно, канонические уравнения этой прямой имеют вид:

Коллинеарные векторы  линейно связаны (глава II. §1), т.е. существует действительный параметр t такой, что
линейно связаны (глава II. §1), т.е. существует действительный параметр t такой, что
Если точка М перемещается вдоль прямой, параметр t изменяется в пределах от  до
до  . Так как
. Так как  — радиусы-векторы точек
— радиусы-векторы точек  и М соответственно, то последнее уравнение мы можем переписать в виде
и М соответственно, то последнее уравнение мы можем переписать в виде

Это уравнение называется векторным уравнением прямой.
Переходя в полученном векторном уравнении к координатам, запишем параметрические уравнения прямой:
Прямую в пространстве можно задать также как пересечение двух плоскостей.
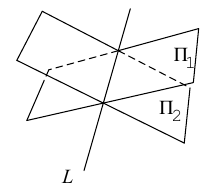
Система
составленная из уравнений этих плоскостей, дает нам общие уравнения прямой в пространстве. Для перехода от общих к каноническим уравнениям прямой, достаточно найти какую-нибудь точку на ней, решив при фиксированном значении одной из координат систему уравнений плоскостей, а также определить направляющий вектор прямой, которым может служить векторное произведение нормальных векторов  плоскостей. т. е. вектор
плоскостей. т. е. вектор 
Пример №3
Найти канонические уравнения прямой
Решение. Полагая в данной системе z = 0, получим
Решив эту систему, найдем х = 1, у = —2. Таким образом, мы получили точку  на прямой. Найдем ее направляющий вектор:
на прямой. Найдем ее направляющий вектор:

Осталось записать канонические уравнения данной прямой:
Научимся теперь вычислять расстояние от точки до прямой в пространстве. Пусть задана точка  и прямая L своими каноническими уравнениями
и прямая L своими каноническими уравнениями
Искомое расстояние  равно, очевидно, высоте треугольника, построенного, на векторах
равно, очевидно, высоте треугольника, построенного, на векторах 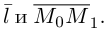 Воспользовавшись геометрическим смыслом длины векторного произведения (глава II. §4), найдем:
Воспользовавшись геометрическим смыслом длины векторного произведения (глава II. §4), найдем:
Пусть нам известны канонические уравнения двух прямых в пространстве:
Очевидно, 
Один из углов между этими прямыми равен углу между их направляющими векторами  и
и  и, следовательно.
и, следовательно.
Изучим взаимное расположение прямых  . Если направляющие векторы
. Если направляющие векторы  коллинеарны, то данные прямые параллельны или совпадают. Совпадать они будут в том случае, когда
коллинеарны, то данные прямые параллельны или совпадают. Совпадать они будут в том случае, когда 
В случае, когда  , прямые пересекаются или являются скрещивающимися.
, прямые пересекаются или являются скрещивающимися.
Прямые пересекаются, очевидно, тогда и только тогда, когда векторы  компланарны. В противном случае данные прямые являются скрещивающимися. Таким образом, для того, чтобы выяснить, являются ли две данные непараллельные прямые пересекающимися или скрещивающимися, достаточно вычислить смешанное произведение
компланарны. В противном случае данные прямые являются скрещивающимися. Таким образом, для того, чтобы выяснить, являются ли две данные непараллельные прямые пересекающимися или скрещивающимися, достаточно вычислить смешанное произведение  и, если оно окажется равным нулю, то прямые пересекаются, иначе — скрещиваются.
и, если оно окажется равным нулю, то прямые пересекаются, иначе — скрещиваются.
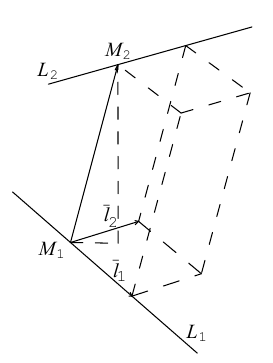
Расстояние  между двумя скрещивающимися прямыми равно, очевидно, расстоянию между параллельными плоскостями, в которых расположены эти прямые и, следовательно, равно высоте параллелепипеда, построенного на векторах
между двумя скрещивающимися прямыми равно, очевидно, расстоянию между параллельными плоскостями, в которых расположены эти прямые и, следовательно, равно высоте параллелепипеда, построенного на векторах  Отсюда, использовав геометрический смысл смешанного произведения (глава II. §5), мы и найдем искомое расстояние:
Отсюда, использовав геометрический смысл смешанного произведения (глава II. §5), мы и найдем искомое расстояние:
Пример №4
Убедиться в том, что прямые
являются скрещивающимися. Найти расстояние между ними и уравнение общего перпендикуляра к ним.
Решение. Первая прямая проходит через точку  параллельно вектору
параллельно вектору  . а вторая — через точку
. а вторая — через точку  параллельно вектору
параллельно вектору  Вычислим смешанное произведение векторов
Вычислим смешанное произведение векторов 

следовательно, прямые  являются скрещивающимися. Для вычисления расстояния между ними иенолтьзуем приведенную выше формулу. Так как
являются скрещивающимися. Для вычисления расстояния между ними иенолтьзуем приведенную выше формулу. Так как

Осталось найти уравнение общего перпендикуляра к данным прямым. Заметим, прежде всего, что его направляющим вектором является уже вычисленный нами вектор  . Очевидно, указанный перпендикуляр расположен в пересечении двух плоскостей
. Очевидно, указанный перпендикуляр расположен в пересечении двух плоскостей  , проходящих через данные прямые параллельно вектору
, проходящих через данные прямые параллельно вектору  Найдем уравнения этих плоскостей по трем элементам. Первая из них проходит через точку
Найдем уравнения этих плоскостей по трем элементам. Первая из них проходит через точку  параллельно векторам
параллельно векторам  следовательно (§1),
следовательно (§1),

Таким образом, плоскость  имеет уравнение
имеет уравнение  Аналогично, плоскость
Аналогично, плоскость  содержит точку
содержит точку  и расположена параллельно векторам
и расположена параллельно векторам  поэтому
поэтому

и, стало быть,  — уравнение плоскости
— уравнение плоскости  . Система из уравнений плоскостей
. Система из уравнений плоскостей  и даст нам общие уравнения перпендикуляра к прямым
и даст нам общие уравнения перпендикуляра к прямым  :
:
В заключение этого параграфа вычислим угол между прямой L, заданной каноническими уравнениями

и плоскостью П, для которой известно ее общее уравнение
Очевидно, искомый угол  связан с углом
связан с углом  между направляющим вектором
между направляющим вектором  прямой и нормальным вектором
прямой и нормальным вектором  плоскости соотношением
плоскости соотношением 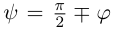 следовательно,
следовательно,  откуда,
откуда,
В частности, если 
Прямая на плоскости
Для прямой на плоскости наблюдается большее разнообразие ее уравнений, так как на плоскости прямая фиксируется точкой, через которую она проходит и, либо вектором ей перпендикулярным (нормальным вектором), либо вектором ей параллельным (направляющим вектором) и, следовательно, для прямой на плоскости можно записывать как уравнения, характерные для плоскости в пространстве (§1), так и аналоги уравнений прямой в пространстве (§2). Перечислим, не повторяя деталей, изложенных в предыдущих двух параграфах, основные уравнения прямой на плоскости и связанные с ними формулы.
Пусть прямая L на плоскости с выбранной в ней системой координат  проходит через точку
проходит через точку 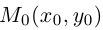 перпендикулярно ненулевому вектору
перпендикулярно ненулевому вектору  .
.
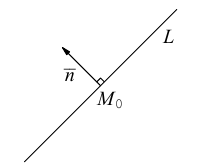
Уравнение такой прямой имеет вид:

откуда после очевидных преобразований получим уравнение

которое представляет собой общее уравнение прямой на плоскости.
Пусть прямая L отсекает на координатных осях  отрезки величиной а и Ь соответственно.
отрезки величиной а и Ь соответственно.
Тогда, как и для плоскости, мы можем записать уравнение прямой в отрезках:
Если прямая L содержит точку  и расположена параллельно ненулевому вектору
и расположена параллельно ненулевому вектору
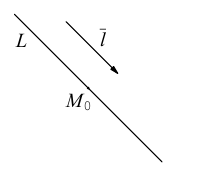
то ее каноническое уравнение имеет вид:
По аналогии с прямой в пространстве, прямая на плоскости может быть задана также векторным уравнением

и параметрическими уравнениями

Расстояние от точки  прямой L на плоскости, заданной общим уравнением
прямой L на плоскости, заданной общим уравнением  , может быть вычислено по формуле:
, может быть вычислено по формуле:

Найдем еще одно уравнение прямой на плоскости, характерное для этого геометрического объекта. Пусть прямая L, заданная своим каноническим уравнением  , непараллельна оси
, непараллельна оси 
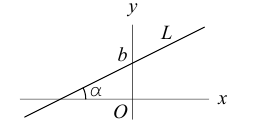
Тогда и мы можем записать уравнение прямой L с угловым коэффициентом:
и мы можем записать уравнение прямой L с угловым коэффициентом:
где  — угловой коэффициент прямой, b — величина отрезка, который отсекает эта прямая на оси
— угловой коэффициент прямой, b — величина отрезка, который отсекает эта прямая на оси  . В частности,
. В частности,

представляет собой уравнение прямой с угловым коэффициентом, которая проходит через точку 
Если две прямые на плоскости заданы общими или каноническими уравнениями, то их взаимное расположение исследуется по аналогии с плоскостями или прямыми, заданными такими же уравнениями (§1 или §2). Изучим поэтому взаимное расположение двух прямых, которые заданы уравнениями с угловым коэффициентом. Итак, рассмотрим две прямые
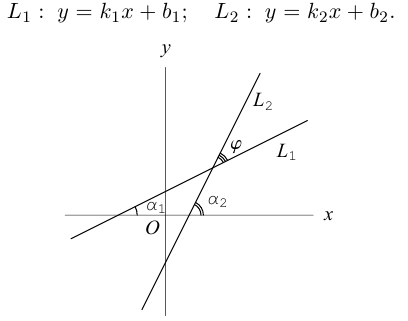
Предположим сначала, что прямые не являются перпендикулярными, обозначим через острый угол между ними. Тогда, очевидно,
острый угол между ними. Тогда, очевидно,  и, следовательно,
и, следовательно,

Если же , то нормальные векторы
, то нормальные векторы  этих прямых ортогональны, следовательно,
этих прямых ортогональны, следовательно,

Таким образом, для перпендикулярности прямых  необходимо и достаточно, чтобы
необходимо и достаточно, чтобы 
Очевидно. прямые параллельны в том и только в том случае, когда равны углы, которые они образуют с осью Ох. Следовательно, для параллельности прямых  необходимо и достаточно, чтобы совпадали их угловые коэффициенты, т. е.
необходимо и достаточно, чтобы совпадали их угловые коэффициенты, т. е. 
Пример №5
Даны прямая  и точка А(—2, 1). Найти уравнения прямых
и точка А(—2, 1). Найти уравнения прямых проходящих через точку А и таких, что
проходящих через точку А и таких, что 


Решение. Прямые имеют общий нормальный вектор
имеют общий нормальный вектор  , поэтому,
, поэтому,

 — общее уравнение прямой
— общее уравнение прямой 
Так как  то направляющим вектором прямой
то направляющим вектором прямой  является нормальный вектор прямой L, следовательно,
является нормальный вектор прямой L, следовательно,
 каноническое уравнение прямой
каноническое уравнение прямой 
Из уравнения прямой L находим  следовательно,
следовательно,  Тогда угловые коэффициенты прямых
Тогда угловые коэффициенты прямых  удовлетворяют уравнению
удовлетворяют уравнению

откуда,  Осталось записать уравнения прямых
Осталось записать уравнения прямых 

Кривые второго порядка на плоскости
В предыдущих трех параграфах нами были изучены линейные геометрические объекты -плоскость и прямая в пространстве и на плоскости. Мы показали, что в декартовой системе координат они определяются алгебраическими уравнениями первой степени, т. е. линейными уравнениями. Предметом нашего исследования в этом параграфе будут являться кривые второго порядка, т. е. линии на плоскости, уравнения которых в декартовой системе координат Оху имеют вид:

где А, В, С, D, Е, F — действительные числа. Мы убедимся в том, что, за исключением случаев вырождения данное уравнение определяет одну из трех замечательных линий — эллипс, гиперболу или параболу. Приведем сначала геометрическое определение каждой из этих линий и найдем их канонические уравнения.
Эллипс
Определение: Эллипсом называется множество точек на плоскости, для каждой из которых сумма расстояний до двух фиксированных точек (фокусов эллипса) есть величина постоянная.
Найдем каноническое уравнение эллипса. Обозначим через 2с фокусное расстояние, т. е. расстояние между фокусами, а через 2а — постоянную сумму расстояний от точек эллипса до фокусов. Из неравенства треугольника следует, что  . Выберем декартову систему координат на плоскости следующим образом: ось Ох направим через фокусы, а начало координат выберем посередине между ними.
. Выберем декартову систему координат на плоскости следующим образом: ось Ох направим через фокусы, а начало координат выберем посередине между ними.
Пусть М(х, у) — произвольная точка эллипса. По определению этой линии,

Упростим последнее уравнение:

откуда, использовав обозначение  , мы и получим каноническое уравнение эллипса :
, мы и получим каноническое уравнение эллипса :
Построим эту линию. Для этого прежде всего заметим, что она симметрична относительно координатных осей и начала координат, так как переменные x и у входят в каноническое уравнение в квадратах. Отсюда следует, что эллипс достаточно построить в первой координатной четверти и затем отразить его относительно координатных осей. Из канонического уравнения эллипса находим:
Очевидно, эта функция определена и убывает при  Кроме того, ее график располагается выше прямой
Кроме того, ее график располагается выше прямой  Из приведенных рассуждений следует, что эллипс представляет собой следующую замкнутую линию на плоскости:
Из приведенных рассуждений следует, что эллипс представляет собой следующую замкнутую линию на плоскости:
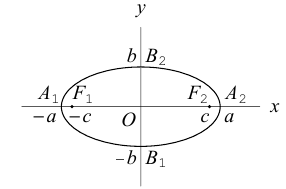
Числа а и b называются соответственно большой и малой полуосями эллипса. Точка O(0,0) -центр эллипса, точки  — вершины эллипса, отрезок
— вершины эллипса, отрезок  — большая,
— большая,  — малая оси эллипса.
— малая оси эллипса.
Форму эллипса характеризует величина  . равная отношению фокусного расстояния к длине большой оси. Это число называется эксцентриситетом эллипса. Очевидно,
. равная отношению фокусного расстояния к длине большой оси. Это число называется эксцентриситетом эллипса. Очевидно,  Так как
Так как
то при  мы имеем
мы имеем  , и, следовательно, эллипс по форме мало отличается от окружности. В предельном случае, когда
, и, следовательно, эллипс по форме мало отличается от окружности. В предельном случае, когда  . полуоси совпадают и эллипс превращается в окружность. Если же
. полуоси совпадают и эллипс превращается в окружность. Если же  и эллипс является вытянутым вдоль оси Ох.
и эллипс является вытянутым вдоль оси Ох.
Замечание. В уравнении эллипса может оказаться, что  Тогда фокусы эллипса находятся на оси
Тогда фокусы эллипса находятся на оси  — большая,
— большая,  — малая полуоси эллипса.
— малая полуоси эллипса.
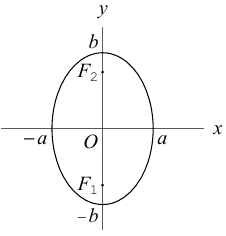
Гипербола
Определение: Гипербола представляет собой линию на плоскости, для каждой точки которой абсолютная величина разности расстояний до двух фиксированных точек (фокусов гиперболы) есть величина постоянная.
Обозначим и здесь фокусное расстояние через 2с. а через 2а — постоянную абсолютную величину разности расстояний от точек гиперболы до фокусов. Для гиперболы а < с, что следует из неравенства треугольника. Выберем декартову систему координат на плоскости точно также, как и при выводе канонического уравнения эллипса.
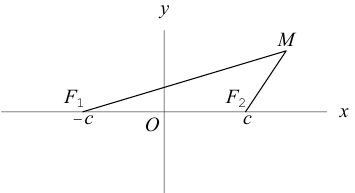
По определению гиперболы для произвольной точки М(х, у) этой линии

Избавляясь от корней в этом уравнении, получим:

Обозначая здесь  , получим каноническое уравнение гиперболы:
, получим каноническое уравнение гиперболы:
Как видно из ее уравнения, гипербола симметрична относительно координатных осей и начала координат. Из канонического уравнения гиперболы следует, что в первой четверти
Эта функция возрастает,  при всех
при всех  при больших х.
при больших х.
а а а а
Это означает, что в первой четверти гипербола, выходя из точки (а, 0) на оси Ох, приближается
затем при больших значениях х к прямой  Следовательно, гипербола выглядит следующим образом:
Следовательно, гипербола выглядит следующим образом:
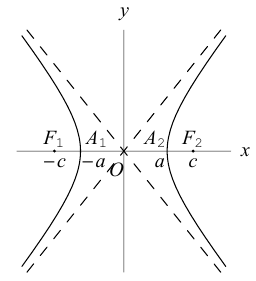
Прямые  называются асимптотами гиперболы. Точка O(0,0) — центр гиперболы. Точки
называются асимптотами гиперболы. Точка O(0,0) — центр гиперболы. Точки  называются вершинами гиперболы. Ось симметрии гиперболы, пересекающая ее в вершинах, называется действительной осью. Вторая ось симметрии, не имеющая с гиперболой общих точек, называется мнимой осью гиперболы. Числа а и Ь называются соответственно действительной и мнимой полуосями гиперболы. Если полуоси равны, то гипербола называется равносторонней (равнобочной).
называются вершинами гиперболы. Ось симметрии гиперболы, пересекающая ее в вершинах, называется действительной осью. Вторая ось симметрии, не имеющая с гиперболой общих точек, называется мнимой осью гиперболы. Числа а и Ь называются соответственно действительной и мнимой полуосями гиперболы. Если полуоси равны, то гипербола называется равносторонней (равнобочной).
Как и для эллипса, определим эксцентриситет гиперболы как отношение половины фокусного расстояния к действительной полуоси:

Так как
то эксцентриситет гиперболы характеризует величину угла, в котором она располагается. При угол мал и, наоборот, если эксцентриситет велик, то и угол. в котором находится гипербола, близок к развернутому.
угол мал и, наоборот, если эксцентриситет велик, то и угол. в котором находится гипербола, близок к развернутому.
Замечание. В каноническом уравнении гиперболы знаки перед квадратами могут располагаться и в обратном порядке:
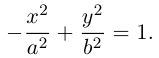
В этом случае фокусы и вершины находятся на оси
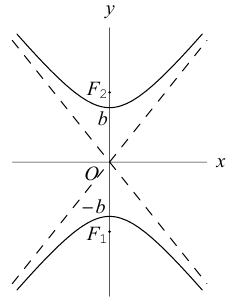
Парабола
Определение: Параболой называется множество точек плоскости, равноудаленных от. фиксированной точки (фокуса параболы) и фиксированной прямой (директрисы параболы).
Обозначим расстояние от фокуса до директрисы через р. Число р > 0 называется параметром параболы. Выберем удобную систему координат на плоскости: ось Ох направим через фокус F перпендикулярно директрисе D, а начало координат возьмем посередине между директрисой и фокусом.
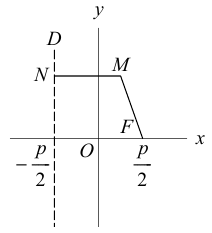
Если М(х,у) — произвольная точка параболы, то по определению этой кривой

После возведения в квадрат и очевидных преобразований, получим каноническое уравнение параболы:
Очевидно, парабола проходит через начало координат и симметрична относительно оси Ох. Точка O(0,0) называется вершиной параболы, ось Ох — осью параболы.
Замечание. Если бы при выборе системы координат мы направили ее оси в противоположные стороны, то каноническое уравнение параболы приняло бы вид:
Аналогично, уравнения
также определяют параболы, фокусы которых расположены на оси Оу. а директрисы параллельны оси Ох.
Приведение уравнения кривой второго порядка к каноническому виду
Покажем, что общее уравнение кривой второго порядка на плоскости, кроме случаев вырождения, определяет одну из линий — эллипс, гиперболу или параболу.
Выясним сначала, как преобразуются координаты точки на плоскости при параллельном переносе системы координат. Предположим, что осуществлен параллельный перенос системы координат Оху в точку  . Пусть
. Пусть  — координаты точки М в старой Оху, а
— координаты точки М в старой Оху, а  — координаты той же точки в новой
— координаты той же точки в новой  системе координат.
системе координат.
Так как  то новые и старые точки координаты на плоскости связаны линейными соотношениями:
то новые и старые точки координаты на плоскости связаны линейными соотношениями:
Рассмотрим теперь уравнение второго порядка на плоскости в частном случае, когда оно не содержит произведения координат ху :

причем коэффициенты А и С не равны одновременно нулю. Здесь возможны три случая.
а) АС > 0. Очевидно, всегда можно считать, тгго А > 0, С > 0. Выделяя в уравнении второго порядка полные квадраты по переменным х и у, получим:

где  — некоторые действительные числа. Ясно, что при
— некоторые действительные числа. Ясно, что при  > 0 ни одна из точек плоскости не удовлетворяет этому уравнению. Если = 0, то единственным решением полученного уравнения является точка
> 0 ни одна из точек плоскости не удовлетворяет этому уравнению. Если = 0, то единственным решением полученного уравнения является точка  . Наконец, при < 0 уравнение приводится к виду
. Наконец, при < 0 уравнение приводится к виду
и, следовательно, в смещенной с помощью параллельного переноса в точку  системе координат оно является каноническим уравнением эллипса:
системе координат оно является каноническим уравнением эллипса:
b) АС < 0. Будем считать для определенности, что А > 0. С < 0.
В этом случае исходное уравнение второго порядка также приводится к виду (1). При F = 0 оно определяет пару прямых, проходящих, через точку  :
:

Если же  , то полученное уравнение мы можем преобразовать к виду
, то полученное уравнение мы можем преобразовать к виду
и, стало быть, после параллельного переноса системы координат в точку  последнее уравнение является каноническим уравнением гиперболы:
последнее уравнение является каноническим уравнением гиперболы:
c) АС = 0. Предположим, например, что 
Выделяя в данном уравнении второго порядка полный квадрат по переменной у, получим:
С {у ~ Уо)2 + Dx + F1=0.
Если в этом уравнении D = 0, то при  > 0 множество решений этого уравнения пусто, а при
> 0 множество решений этого уравнения пусто, а при  < 0 полученное уравнение определяет пару прямых, параллельных оси Ох :
< 0 полученное уравнение определяет пару прямых, параллельных оси Ох :
Если же  , то мы можем привести уравнение к виду:
, то мы можем привести уравнение к виду:

т.е. после параллельного переноса системы координат в точку  , мы получим тем самым каноническое уравнение параболы:
, мы получим тем самым каноническое уравнение параболы:
Аналогично. если в исходном уравнении второго порядка  то, не принимая во внимание вырожденные случаи, это уравнение мы также можем привести к каноническому уравнению параболы:
то, не принимая во внимание вырожденные случаи, это уравнение мы также можем привести к каноническому уравнению параболы:
Пример №6
Привести уравнение второго порядка к каноническому виду, назвать и построить кривую:

Решение. Выделяя полные квадраты по обеим переменным, получим:

что представляет собой каноническое уравнение эллипса в смещенной в точку  системе координат. Для этого эллипса
системе координат. Для этого эллипса  и, следовательно, фокусы находятся в точках
и, следовательно, фокусы находятся в точках  . Эксцентриситет эллипса равен
. Эксцентриситет эллипса равен 
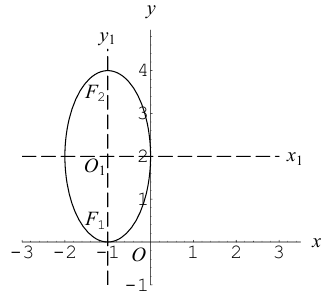
Пример №7
Найти каноническое уравнение параболы с вершиной в точке  , осью симметрии, параллельной координатной оси Ох и фокусом на оси Оу. Построить параболу.
, осью симметрии, параллельной координатной оси Ох и фокусом на оси Оу. Построить параболу.
Решение. Фокус параболы находится в точке F(0 , 2), следовательно, уравнение параболы с учетом смещения имеет вид:

Здесь и, стало быть.
и, стало быть.

каноническое уравнение параболы.
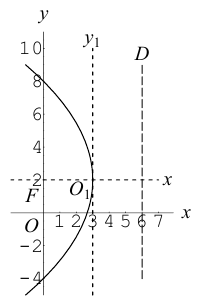
Замечание. Для приведения к каноническому виду уравнения второго порядка, содержащего произведение координат ху, необходимо кроме параллельного переноса выполнить еще и поворот системы координат на определенный угол. Например, для равносторонней гиперболы ху = 1 следует повернуть систему координат Оху вокруг ее начала на угол 45° против часовой стрелки. Поскольку вершины гиперболы находятся на расстоянии  от начала координат. то в новой системе координат
от начала координат. то в новой системе координат  каноническое уравнение гиперболы имеет вид:
каноническое уравнение гиперболы имеет вид:
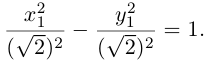
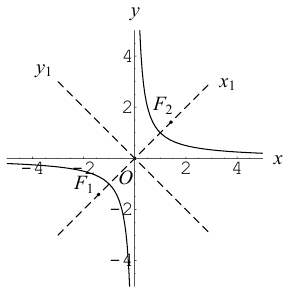
Поверхности второго порядка в пространстве
В заключение этой главы мы изучим поверхности в пространстве, которые в декартовой системе координат задаются алгебраическими уравнениями второй степени. Существуют пять видов таких поверхностей: эллипсоид, гиперболоиды, параболоиды, цилиндры второго порядка и конус второго порядка.
Поверхность вращения
Найдем уравнение поверхности, которая получается вращением некоторой линии вокруг одной из координатных осей. Пусть линия L, которая в координатной плоскости Oyz задается уравнением F(y, z) = 0. вращается вокруг оси Oz.
Пусть M(x,y,z) — произвольная точка на поверхности вращения. Перегоним ее по окружности, расположенной в сечении поверхности плоскостью, проходящей через данную точку перпендикулярно оси Oz, в точку N на линии L. Поскольку расстояние от точки М до оси Oz равно  то точка N имеет координаты
то точка N имеет координаты  . Подставив координаты точки N в уравнение линии L. мы и получим тем самым уравнение поверхности вращения:
. Подставив координаты точки N в уравнение линии L. мы и получим тем самым уравнение поверхности вращения:

Найдем теперь уравнения поверхностей, которые получаются вращением кривых второго порядка с последующей линейной деформацией этих поверхностей.
Эллипсоид
Возьмем в плоскости Oyz эллипс
и будем вращать его вокруг оси Oz. В результате, как следует из предыдущего пункта, мы получим поверхность с уравнением
которая называется эллипсоидом вращения. Заменив в найденном уравнении координату х на — , т. е. линейно деформируя поверхность вдоль оси Ох с коэффициентом
, т. е. линейно деформируя поверхность вдоль оси Ох с коэффициентом —, мы получим тем самым уравнение эллипсоида общего вида:
—, мы получим тем самым уравнение эллипсоида общего вида:
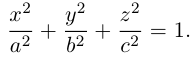
Положительные числа а, b, с называются полуосями эллипсоида.
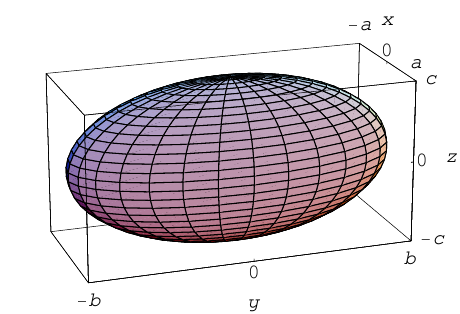
Очевидно, сечениями эллипсоида плоскостями параллельными координатным, являются эллипсы.
Замечание. В частном случае, когда а = b = с = R эллипсоид превращается в сферу

радиуса R с центром в начале координат.
Гиперболоиды
а) Однополостный гиперболоид.
Вращая гиперболу
вокруг оси Oz, получим однополостный гиперболоид вращения с уравнением
После линейной деформации вдоль оси Ох эта поверхность превращается в однополостный гиперболоид общего вида с осью Oz :
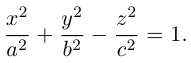
Аналогично, уравнения однополостных гиперболоидов с осями Ох и Оу имеют, соответственно, вид:

Сечениями однополостного гиперболоида плоскостями, перпендикулярными его оси, являются эллипсы, а в сечениях плоскостями, перпендикулярными другим координатным осям, располагаются гиперболы.
Двухполостный гиперболоид
Поверхность, полученная вращением вокруг оси Оz гиперболы
вершины которой расположены на оси вращения, называется двухполостным гиперболоидом вращения. Запишем уравнение двухполостного гиперболоида:
Линейная деформация двухполостного гиперболоида вращения вдоль оси Ох прообразует его в двухполостный гиперболоид общего вида с осью Oz. Уравнение этой поверхности имеет вид:
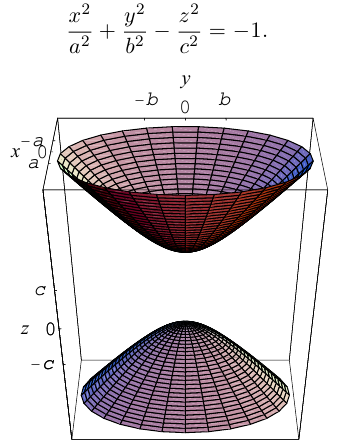
Двухполостные гиперболоиды с осями Ох и Оу имеют, соответственно, уравнения:

Как и в случае однополостного гиперболоида, сечениями двухполостного гиперболоида плоскостями, параллельными координатным, являются эллипсы и гиперболы.
Параболоиды
а) Эллиптический параболоид
Вращение параболы вокруг ее оси приводит к поверхности, которая называется параболоидом вращения. В частности, если параболу с каноническим уравнением  вращать вокруг оси Oz, то, как следует из пункта 0, уравнение полученного параболоида вращения имеет вид:
вращать вокруг оси Oz, то, как следует из пункта 0, уравнение полученного параболоида вращения имеет вид:
Линейная деформация параболоида вращения вдоль оси Оу превращает его в эллиптический параболоид с уравнением:
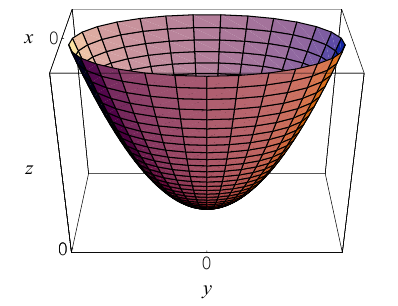
Положительные числа p, q называются параметрами параболоида, точка O(0,0) — вершина, ось Oz — ось эллиптического параболоида.
Уравнения эллиптических параболоидов с осями Ох и Оу имеют, соответственно, вид:

Как следует из уравнения эллиптического параболоида, плоскости, перпендикулярные его оси, пересекают эту поверхность по эллипсам, а в сечениях плоскостями, параллельными другим координатным, находятся параболы.
Замечание. Изменение знака в правой части уравнения эллиптического параболоида приводит к отражению этой поверхности относительно координатной плоскости, перпендикулярной оси параболоида.
b) Гиперболический параболоид.
Будем поступательно перемещать образующую параболу

расположенную в плоскости Oyz, параллельно самой себе вдоль направляющей параболы

находящейся в плоскости Oxz. Полученная таким образом поверхность называется гиперболическим параболоидом или седловидной поверхностью.
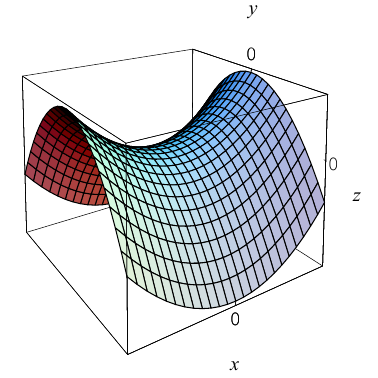
Найдем уравнение этой поверхности. Пусть М(х. у, z) — произвольная точка гиперболического параболоида. По его построению точка М принадлежит параболе с вершиной в точке  , параллельной параболе
, параллельной параболе  Так как координаты произвольной точки
Так как координаты произвольной точки  этой параболы удовлетворяют уравнению
этой параболы удовлетворяют уравнению
то, подставив в него координаты точки М, мы и получим после несложных преобразований уравнение гиперболического параболоида:
Здесь, как и для эллиптического параболоида, числа р, q — параметры гиперболического параболоида, точка O(0,0) и ось Oz — соответственно вершина и ось гиперболического параболоида.
Замечание 1. Седловидная поверхность может быть также получена перемещением параболы  параллельно самой себе вдоль параболы
параллельно самой себе вдоль параболы 
Судя по уравнению гиперболического параболоида, в сечениях этой поверхности плоскостями z = h > 0 находятся гиперболы, действительные оси которых параллельны координатной оси Ох. Аналогично, плоскости z = h < 0 пересекают данную поверхность по гиперболам с действительными осями, параллельными оси Оу. Наконец, плоскость Оху пересекает гиперболический параболоид по двум прямым 
Гиперболические параболоиды, осями которых служат координатные оси Ох и Оу, имеют, соответственно, уравнения:
Замечание 2. Отразив седловидную поверхность относительно координатной плоскости, перпендикулярной ее оси, получим гиперболический параболоид, уравнение которого отличается знаком правой части от уравнения исходной поверхности.
Цилиндры второго порядка
Цилиндром второго порядка называется поверхность, полученная перемещением некоторой прямой (образующей) вдоль кривой второго порядка (направляющей), расположенной в плоскости, не содержащей образующую, параллельно фиксированному ненулевому вектору в пространстве.
Ограничимся случаем, когда направляющая расположена в одной из координатных плоскостей, а образующая перпендикулярна этой плоскости. Возьмем для определенности в плоскости Оху кривую второго порядка и будем перемещать прямую, параллельную оси Oz, вдоль этой кривой. Так как проекцией любой точки M(x,y,z) полученного таким образом цилиндра на плоскость Оху является точка N(x,y), принадлежащая кривой второго порядка, то координаты точки М удовлетворяют уравнению этой кривой. Следовательно, уравнением построенного цилиндра является уравнение его направляющей.
Перечислим теперь цилиндры второго порядка.
1) 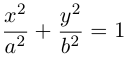 — эллиптический цилиндр.
— эллиптический цилиндр.
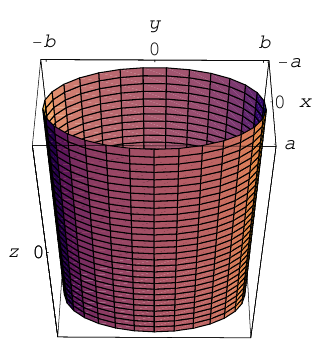
В частности, при а = b мы получим круговой цилиндр.
2 2 X у
2)  — гиперболический цилиндр.
— гиперболический цилиндр.
3)  — параболический цилиндр.
— параболический цилиндр.
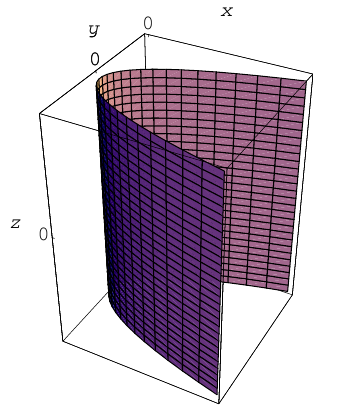
Аналогичные уравнения имеют цилиндры второго порядка, образующие которых параллельны осям Ох и Оу, а направляющие расположены в координатных плоскостях Oyz и Oxz, соответственно.
Конус второго порядка
Конус второго порядка представляет собой поверхность, которая может быть получена перемещением прямой (образующей), имеющей неподвижную точку, которая называется вершиной конуса, вдоль кривой второго порядка (направляющей), расположенной в плоскости, не содержащей вершину.
Найдем уравнение конуса, вершина которого совпадает с началом координат, а направляющей служит эллипс с уравнением
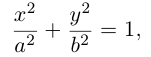
расположенный в плоскости z = с, с > 0.
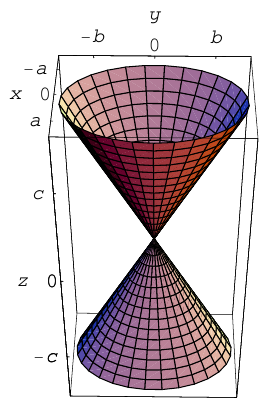
Пусть M(x,y,z) — произвольная точка конуса. Обозначим через  точку перс-сечения образующей, проходящей через точку М, с направляющей. Координаты точки
точку перс-сечения образующей, проходящей через точку М, с направляющей. Координаты точки  удовлетворяют уравнениям
удовлетворяют уравнениям
а точки M — уравнениям
Из последних уравнений мы находим:
Подставив найденные выражения для в уравнение эллипса, получим после несложных преобразований уравнение конуса второго порядка:
в уравнение эллипса, получим после несложных преобразований уравнение конуса второго порядка:
Координатная ось Oz называется осью конуса. Если а = b, то конус является круговым.
Конусы второго порядка с осями Ох и Оу имеют, соответственно, уравнения:

Покажем, что вид конуса второго порядка не зависит от выбора направляющей. Действительно, если в качестве направляющей взять гиперболу
находящегося в плоскости 2 = с, то после рассуждений, аналогичных предыдущим, получим поверхность с уравнением
т. е. конус с осью Ох. Если же за направляющую мы выберем в плоскости z = с параболу с уравнением
то построенный таким образом конус имеет уравнение
Наблюдая со стороны положительной полуоси Оу, повернем систему координат Oxz вокруг оси Оу на угол 45° против часовой стрелки. Тогда произведение xz в системе координат 
запишется как  (§4, пункт 4, замечание). Следовательно, в новой системе координат Oxyz найденное уравнение поверхности приобретает вид
(§4, пункт 4, замечание). Следовательно, в новой системе координат Oxyz найденное уравнение поверхности приобретает вид
и, стало быть, эта поверхность является конусом с осью 
Как следует из уравнения конуса и его построения, плоскости, перпендикулярные его оси, пересекают эту поверхность по эллипсам, сечениями конуса плоскостями, параллельными его оси, являются гиперболы, и, наконец, в сечениях конуса плоскостями, параллельными образующей, располагаются параболы.
Приведение уравнения поверхности второго порядка к каноническому виду
По аналогии с уравнением кривой второго порядка (§4, пункт 4), уравнение поверхности второго порядка, не содержащее произведений координат, мы можем за счет выделения полных квадратов привести к уравнению одной из рассмотренных в пунктах 1—5 поверхностей. Следовательно, мы получим одну из поверхностей второго порядка в смещенной с помощью параллельного переноса системе координат. Исключение, правда, составляет случай, когда уравнение поверхности содержит полный квадрат и два линейных слагаемых относительно других координат. Такая поверхность представляет собой параболический цилиндр в смещенной с помощью параллельного переноса и повернутой затем вокруг одной из координатных осей системе координат.
Пример №8
Привести уравнение второго порядка

к каноническому виду, назвать и построить поверхность.
Решение. После выделения полных квадратов по переменным у, z получим:

Переписав это уравнение в виде

мы замечаем, что в смещенной с помощью параллельного переноса в точку  системе координат, эта поверхность представляет собой гиперболический параболоид с параметрами р = 1, q = 4.
системе координат, эта поверхность представляет собой гиперболический параболоид с параметрами р = 1, q = 4.
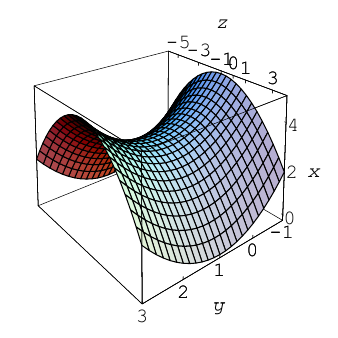
Прямая на плоскости. Общее уравнение прямой на плоскости
Докажем, что всякая прямая на плоскости задается в любой пдск уравнением первой степени относительно двух переменных.
Если A – некоторая точка на прямой  – вектор, перпендикулярный ей, то, во-первых, через A перпендикулярно
– вектор, перпендикулярный ей, то, во-первых, через A перпендикулярно  проходит единственная прямая на плоскости, а, во-вторых, для любой точки
проходит единственная прямая на плоскости, а, во-вторых, для любой точки  вектор
вектор  . Таким свойством обладают только точки, лежащие на
. Таким свойством обладают только точки, лежащие на .
.
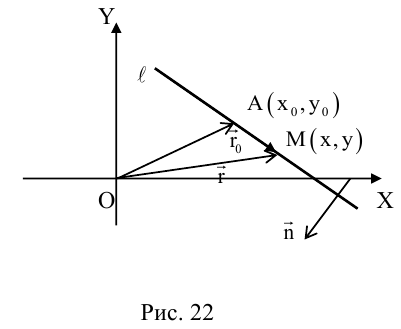
Чтобы вывести уравнение прямой, зададим на плоскости пдск XOY .
В этой системе координат 
Пусть M (x, y) – произвольная точка
на  . Тогда (рис. 22 )
. Тогда (рис. 22 )  . Так как
. Так как  , то по свойству 5 скалярного произведения
, то по свойству 5 скалярного произведения  – векторное уравнение прямой .
– векторное уравнение прямой .
 поэтому по формуле (2.5) получим
поэтому по формуле (2.5) получим

Координаты точек, лежащих на прямой, связаны соотношением (3.1). Если же  не перпендикулярен
не перпендикулярен  значит, координаты M не будут удовлетворять полученному уравнению. Поэтому (3.1) – уравнение прямой, проходящей через заданную точку, перпендикулярно заданному вектору. Заметим, что это уравнение линейно относительно переменных x и y .
значит, координаты M не будут удовлетворять полученному уравнению. Поэтому (3.1) – уравнение прямой, проходящей через заданную точку, перпендикулярно заданному вектору. Заметим, что это уравнение линейно относительно переменных x и y .
Определение: Любой ненулевой вектор  , перпендикулярный прямой , называется ее нормальным вектором, или нормалью.
, перпендикулярный прямой , называется ее нормальным вектором, или нормалью.
 . Обозначая
. Обозначая  , получим
, получим

(3.2) – общее уравнение прямой на плоскости, 
Уравнение прямой с направляющим вектором
Определение: Любой ненулевой вектор  , параллельный прямой, называется ее направляющим вектором.
, параллельный прямой, называется ее направляющим вектором.
Если A – некоторая точка на прямой  – вектор, параллельный ей, то, во-первых, через A параллельно
– вектор, параллельный ей, то, во-первых, через A параллельно  проходит единственная прямая, а, во-вторых, для любой точки
проходит единственная прямая, а, во-вторых, для любой точки  вектор
вектор  Таким свойством обладают только точки, лежащие на .
Таким свойством обладают только точки, лежащие на .
Чтобы вывести уравнение прямой, зададим на плоскости пдск XOY . В этой системе координат 
Пусть M (x, y) – произвольная точка на . Тогда  и
и  . Запишем условие коллинеарности векторов:
. Запишем условие коллинеарности векторов:

(3.3) – уравнение прямой на плоскости с направляющим вектором.
Если  – направляющий вектор прямой , поэтому уравнение прямой, проходящей через две точки имеет вид:
– направляющий вектор прямой , поэтому уравнение прямой, проходящей через две точки имеет вид:

Уравнение прямой с угловым коэффициентом
Пусть  – направляющий вектор прямой
– направляющий вектор прямой не параллельна оси OY , тогда
не параллельна оси OY , тогда 
Определение: Угловым коэффициентом прямой  называется число
называется число
Очевидно, что если  – угол между прямой и положительным направлением оси ОХ, то
– угол между прямой и положительным направлением оси ОХ, то 
Рассмотрим уравнение (3.3) прямой с направляющим вектором 

Отсюда следует (3.5) – уравнение прямой с заданным угловым коэффициентом, проходящей через заданную точку 

Из (3.5) получим  . Обозначим
. Обозначим  , тогда
, тогда

(3.6) – уравнение прямой с угловым коэффициентом.
Угол между прямыми на плоскости
Определение: Углом между двумя прямыми на плоскости называется любой из двух смежных углов, образованных ими при пересечении. Если прямые параллельны, то угол между ними равен 0 или радиан.
радиан.
Пусть прямые заданы общими уравнениями.
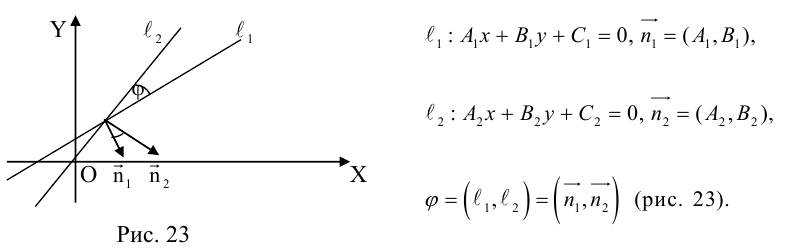

Условие параллельности прямых:
Условие перпендикулярности прямых:

Рассмотрим случай, когда прямые заданы уравнениями с угловым коэффициентом.
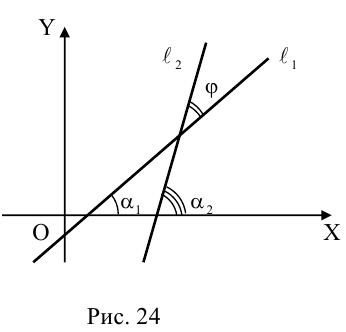
Так как  (рис. 24 ), то
(рис. 24 ), то
Условие параллельности прямых:

Условие перпендикулярности:
 Так как
Так как 
не существует, то 
Пример №9
Даны вершины треугольника: 
Написать:
а) уравнение медианы AM , б) высоты AH , в) найти угол между AM и AH
(рис. 25).
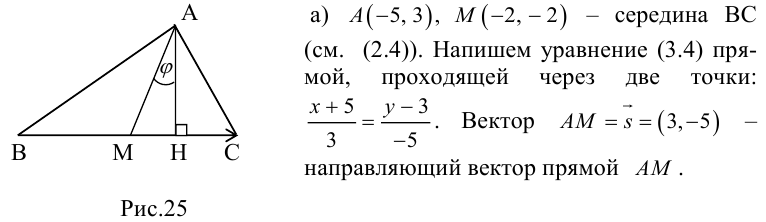
Перепишем уравнение медианы в общем виде:
 – нормаль АМ.
– нормаль АМ.
б) – нормаль AH . Уравнение прямой (3.1), проходящей через точку A перпендикулярно вектору
– нормаль AH . Уравнение прямой (3.1), проходящей через точку A перпендикулярно вектору  :
:

в) . По формуле (3.7)
. По формуле (3.7) 
Расстояние от точки до прямой на плоскости
Пусть в некоторой пдск XOY задана прямая  и точка
и точка  Найдем расстояние от точки M до прямой .
Найдем расстояние от точки M до прямой .
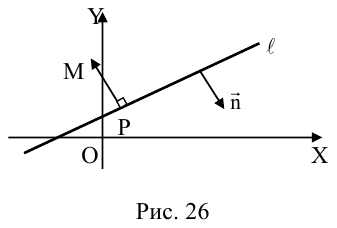
Пусть  – проекция точки M на
– проекция точки M на  (рис. 26), тогда
(рис. 26), тогда  .
.
Нормаль

где d – искомое расстояние,  – скалярное произведение.
– скалярное произведение.
Следовательно,
Так как  . Поэтому
. Поэтому

Отсюда 
(3.8) – формула для вычисления расстояния от точки до прямой на плоскости.
Пример №10
Найти длину высоты 
Уравнение  —
—
искомая длина высоты АН.
Кривые второго порядка
Окружность
Определение: Кривые второго порядка – плоские линии, которые в пдск XOY задаются уравнениями второй степени относительно двух переменных x,y.
Определение: Окружностью называется совокупность точек плоскости, равноудаленных от фиксированной точки, называемой ее центром.
Выведем уравнение окружности. Зададим пдск XOY . Пусть  – фиксированная точка (центр окружности), а R – расстояние от точек окружности до ее центра (радиус окружности). Если
– фиксированная точка (центр окружности), а R – расстояние от точек окружности до ее центра (радиус окружности). Если  – произвольная точка окружности, то длина
– произвольная точка окружности, то длина  равна R .
равна R . 

Если точка M (x, y) не лежит на окружности, то  и ее координаты уравнению (3.9) не удовлетворяют, поэтому, (3.9) – уравнение окружности с центром
и ее координаты уравнению (3.9) не удовлетворяют, поэтому, (3.9) – уравнение окружности с центром  радиуса R .
радиуса R .
Если  , то уравнение окружности примет вид:
, то уравнение окружности примет вид:

(3.10) – каноническое уравнение окружности.
Пример №11
Показать, что уравнение  задает окружность (то есть найти ее центр и радиус).
задает окружность (то есть найти ее центр и радиус).
Приведем данное уравнение к виду (3.9), выделив полный квадрат по переменной x :

Пример №12
Написать уравнение линии центров окружностей

Найдем центр второй окружности:

Уравнение прямой (3.4), проходящей через две точки:

Эллипс
Определение: Эллипс – совокупность точек плоскости, сумма расстояний от которых до двух фиксированных точек этой плоскости, называемых фокусами, есть величина постоянная и большая, чем расстояние между фокусами.
Чтобы вывести уравнение эллипса, выберем пдск следующим образом: ось абсцисс проведем через фокусы  , а ось ординат – посередине отрезка
, а ось ординат – посередине отрезка  перпендикулярно оси абсцисс. Обозначим расстояние между фокусами
перпендикулярно оси абсцисс. Обозначим расстояние между фокусами  тогда
тогда  . Пусть M(x, y) – произвольная точка, лежащая на эллипсе, а 2a – сумма расстояний от точек на эллипсе до
. Пусть M(x, y) – произвольная точка, лежащая на эллипсе, а 2a – сумма расстояний от точек на эллипсе до  ,
,
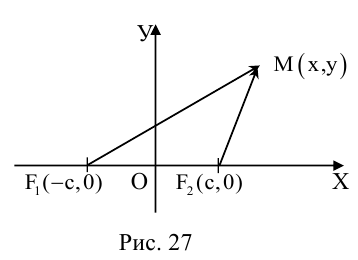
2a>2c определению эллипса.
 (рис. 27).
(рис. 27).
Запишем в виде уравнения свойство точек, принадлежащих эллипсу, сформулированное в определении:

(3.11) – уравнение эллипса в выбранной системе координат. Преобразуем его к
более простому (каноническому) виду. Для этого умножим (3.11) на сопряженное выражение:
Сложим (3.11) и (3.12) и результат возведем в квадрат:
Так как по определению a>c, то есть  , то обозначим
, то обозначим  .
.
Тогда из (3.13) получим:

(3.14) – каноническое уравнение эллипса.
Исследуем форму эллипса по его каноническому уравнению. Найдем точки пересечения с осями координат:
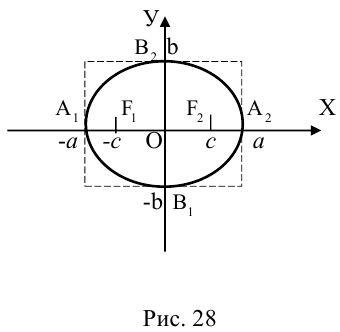

Из (3.14) следует, что

Значит, эллипс расположен в прямоугольнике со сторонами  .
.
Кроме того, из уравнения следует, что он симметричен относительно OX и OY . O(0,0) – точка пересечения осей симметрии – центр симметрии эллипса.
Ось, на которой лежат фокусы, называется фокальной осью эллипса. Точки пересечения эллипса с осями симметрии называются его вершинами.
 – полуфокусное расстояние,
– полуфокусное расстояние,  – малая полуось,
– малая полуось,
 – большая полуось эллипса и
– большая полуось эллипса и  (рис. 28).
(рис. 28).
Отношение полуфокусного расстояния к длине большой полуоси  называется эсцентриситетом эллипса. Он характеризует форму эллипса.
называется эсцентриситетом эллипса. Он характеризует форму эллипса.
Так как  , и чем меньше
, и чем меньше  , тем больше эллипс похож на окружность. Для окружности
, тем больше эллипс похож на окружность. Для окружности  .
.
ЗАМЕЧАНИЕ 1. Уравнение эллипса, центр которого  , а оси симметрии параллельны координатным осям, имеет вид:
, а оси симметрии параллельны координатным осям, имеет вид:

ЗАМЕЧАНИЕ 2. К кривым второго порядка эллиптического типа относятся также мнимый эллипс
 и точка
и точка 
Пример №13
Найти эксцентриситет эллипса  (рис. 29).
(рис. 29).
Так как  , то фокусы лежат на оси OY и поэтому
, то фокусы лежат на оси OY и поэтому 

Гипербола
Определение: Гипербола – совокупность точек плоскости, модуль разности расстояний от которых до двух фиксированных точек этой плоскости, называемых фокусами, есть величина постоянная, не равная нулю и меньшая, чем расстояние между фокусами.
Чтобы вывести уравнение гиперболы, выберем пдск следующим образом:
ось абсцисс проведем через фокусы  , а ось ординат – посередине отрез-
, а ось ординат – посередине отрез-
ка  перпендикулярно оси абсцисс. Тогда
перпендикулярно оси абсцисс. Тогда  – фокусы гиперболы (рис. 30). Пусть M(x, y) – произвольная точка, лежащая на гиперболе.
– фокусы гиперболы (рис. 30). Пусть M(x, y) – произвольная точка, лежащая на гиперболе.
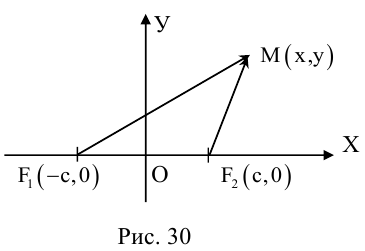
 – расстояние между фокусами, 2a – модуль разности расстояний от точек на гиперболе до
– расстояние между фокусами, 2a – модуль разности расстояний от точек на гиперболе до 
 (рис. 30).
(рис. 30).
Запишем свойство точек, принадлежащих гиперболе, сформулированное в определении:

(3.16) – уравнение гиперболы в выбранной системе координат ( «+» – если разность расстояний положительна, и «–» – если отрицательна). Чтобы привести это уравнение к более простому виду, умножим (3.16) на сопряженное выражение и выполним такие же действия, как при упрощении уравнения эллипса, после чего получим:

По определению  . Обозначим
. Обозначим  , тогда (3.17) перепишется в виде:
, тогда (3.17) перепишется в виде:

(3.18) – каноническое уравнение гиперболы.
Исследуем форму гиперболы по ее каноническому уравнению.
Из (3.18) следует, что гипербола симметрична относительно осей координат. Если x=0,  , значит, точек пересечения с OY нет; если y = 0 , то
, значит, точек пересечения с OY нет; если y = 0 , то  . Точки пересечения с осями симметрии называются вершинами гиперболы. Кроме того, из (3.18) следует, что
. Точки пересечения с осями симметрии называются вершинами гиперболы. Кроме того, из (3.18) следует, что  . Точка пересечения осей симметрии называется центром гиперболы. Ось симметрии, на которой расположены фокусы, называется фокальной осью. При этом фокальная ось также называется действительной (с ней гипербола пересекается), а ось симметрии, с которой гипербола не пересекается, называется ее мнимой осью.
. Точка пересечения осей симметрии называется центром гиперболы. Ось симметрии, на которой расположены фокусы, называется фокальной осью. При этом фокальная ось также называется действительной (с ней гипербола пересекается), а ось симметрии, с которой гипербола не пересекается, называется ее мнимой осью.
c – полуфокусное расстояние, a – действительная полуось, b – мнимая полуось. Отношение полуфокусного расстояния к длине действительной полуоси называется эксцентриситетом гиперболы:  . Так как по определению
. Так как по определению 
Считая, что  из (3.18) получим, что
из (3.18) получим, что  – уравнение части гиперболы, расположенной в первой четверти. Заметим, что при неограниченном возрастании
– уравнение части гиперболы, расположенной в первой четверти. Заметим, что при неограниченном возрастании  разность
разность  , то есть при достаточно больших x гипербола приближается к прямой
, то есть при достаточно больших x гипербола приближается к прямой  ,
,
причем ординаты точек на ней меньше соответствующих ординат точек на этой
прямой: . Прямая
. Прямая  называется асимптотой гиперболы.
называется асимптотой гиперболы.
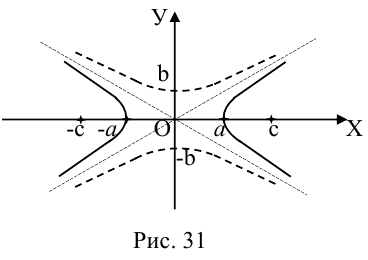
Из симметрии гиперболы следует, что то же самое происходит во второй, третьей и четвертой четвертях. Поэтому  – также асимптота.
– также асимптота.
Итак, прямые – асимптоты гиперболы (3.18), а гипербола – кривая, состоящая из двух ветвей (рис. 31).
– асимптоты гиперболы (3.18), а гипербола – кривая, состоящая из двух ветвей (рис. 31).
Если фокусы гиперболы лежат на OY , то ее уравнение имеет вид:

Гиперболы (3.18) и (3.19) называются сопряженными (рис. 31). Уравнения асимптот (3.19) такие же, как и для (3.18), но действительной является ось OY .
Если a = b, то гипербола называется равносторонней:  – уравнения ее асимптот (рис. 32 ).
– уравнения ее асимптот (рис. 32 ).
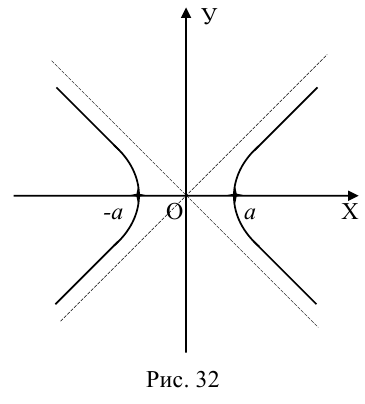
Очевидно, в этом случае асимптоты перпендикулярны. После поворота осей координат на  против часовой стрелки, получим гиперболу, задаваемую уравнением
против часовой стрелки, получим гиперболу, задаваемую уравнением
ЗАМЕЧАНИЕ 1. Если центр гиперболы в точке  , а оси симметрии параллельны координатным осям, то уравнение гиперболы имеет вид
, а оси симметрии параллельны координатным осям, то уравнение гиперболы имеет вид

ЗАМЕЧАНИЕ 2. К кривым второго порядка гиперболического типа относится также пара пересекающихся прямых: 
Пример №14
Найти координаты центра и написать уравнения асимптот гиперболы 
Приведем данное уравнение к виду (3.20):
Таким образом,  – центр,
– центр,  – уравнения асимптот данной гиперболы.
– уравнения асимптот данной гиперболы.
Парабола
Определение: Парабола – совокупность точек плоскости, равноудаленных от фиксированной точки этой плоскости, называемой фокусом, и фиксированной прямой, не проходящей через эту точку, называемой директрисой. Чтобы вывести уравнение параболы, выберем пдск следующим образом: ось абсцисс проведем через фокус перпендикулярно директрисе, а ось ординат посередине между фокусом и директрисой (рис. 33).
Пусть расстояние между фокусом F и директрисой DK равно p . Тогда  . Если M(x, y) – произвольная точка на параболе, то по определению
. Если M(x, y) – произвольная точка на параболе, то по определению
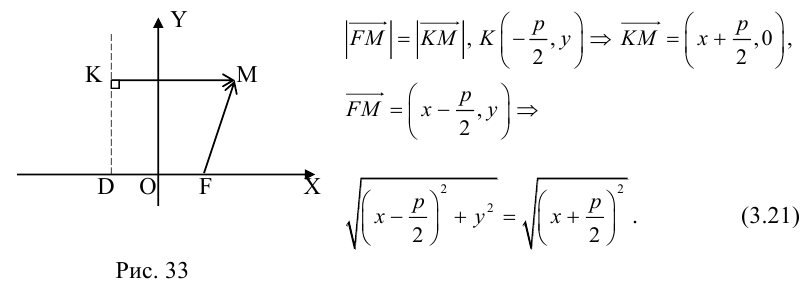
(3.21) – уравнение параболы в выбранной системе координат.
Упростим его:

(3.22) – каноническое уравнение параболы; p называется ее параметром.
Из уравнения следует, что парабола симметрична относительно OX и проходит через начало координат. Кроме того, если  , поэтому кривая лежит в правой полуплоскости и с ростом величины
, поэтому кривая лежит в правой полуплоскости и с ростом величины  также растет. Точка пересечения параболы с осью симметрии называется ее вершиной (рис. 34).
также растет. Точка пересечения параболы с осью симметрии называется ее вершиной (рис. 34).
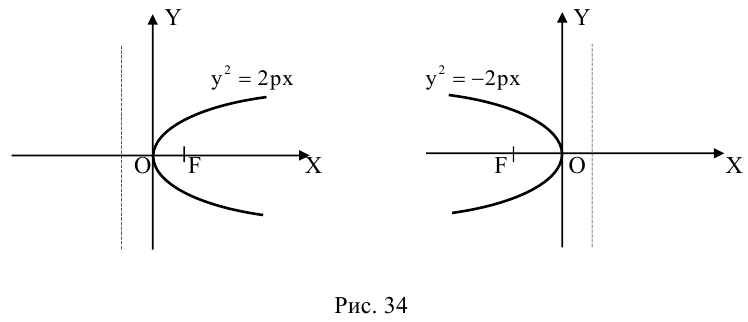
Если фокус параболы на оси ОУ (рис. 35), то ее каноническое уравнение имеет вид 
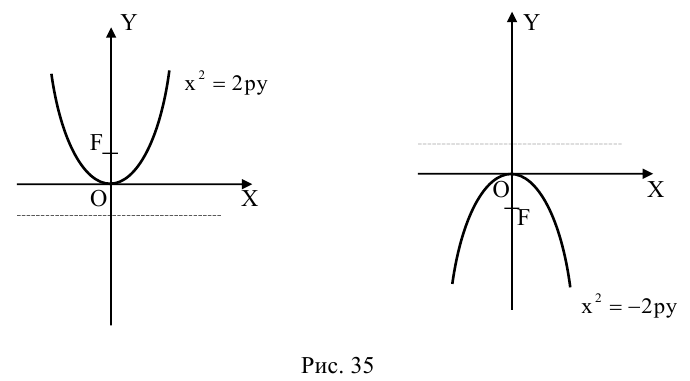
ЗАМЕЧАНИЕ 1. Если вершина параболы в точке  и ось симметрии параллельна OX , то ее уравнение имеет вид
и ось симметрии параллельна OX , то ее уравнение имеет вид 
ЗАМЕЧАНИЕ 2. К кривым второго порядка параболического типа относятся также  – пара совпадающих прямых;
– пара совпадающих прямых;
 – пара параллельных прямых;
– пара параллельных прямых;  пара мнимых параллельных прямых.
пара мнимых параллельных прямых.
Пример №15
Написать уравнение геометрического места точек, равноудаленных от прямой x + y — 1 = 0 и точки F(-3,2).
По определению множество точек, равноудаленных от данных точки и прямой, является параболой. Пусть M (x, y) – произвольная точка искомой параболы, тогда  . Расстояние от точки M до прямой x + y — 1 = 0 вычисляется по формуле (3.8):
. Расстояние от точки M до прямой x + y — 1 = 0 вычисляется по формуле (3.8):  . Из условия следует, что
. Из условия следует, что
 – уравнение искомого геометрического места точек.
– уравнение искомого геометрического места точек.
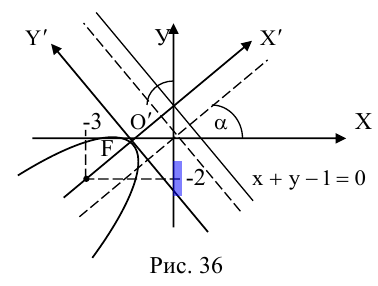
Если оси координат системы XOY повернуть на угол  так, чтобы одна из них стала параллельна директрисе, а затем перенести начало координат в точку
так, чтобы одна из них стала параллельна директрисе, а затем перенести начало координат в точку  – вершину параболы, то в новой системе
– вершину параболы, то в новой системе  уравнение параболы будет каноническим
уравнение параболы будет каноническим  (рис. 36).
(рис. 36).
ЗАМЕЧАНИЕ. Можно показать, что, кроме окружности, эллипса, гиперболы, параболы и вырожденных случаев, указанных в замечаниях, других кривых второго порядка не существует.
Преобразования координат на плоскости
Преобразование координат — замена системы координат на плоскости, в пространстве или, в самом общем случае, на заданном n-мерном многообразии.
Параллельный перенос координатных осей
Пусть на плоскости задана пдск ХОУ. Будем называть ее “старой”. “Новая” система координат  получена из “старой” параллельным переносом осей в точку
получена из “старой” параллельным переносом осей в точку  . Выясним, как связаны координаты
. Выясним, как связаны координаты  одной и той же точки М в этих системах координат.
одной и той же точки М в этих системах координат.
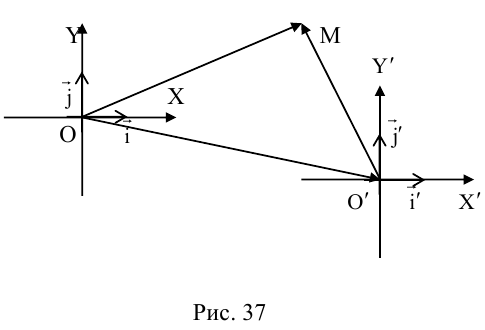
Пусть  – орты координатных осей системы ХОУ, а
– орты координатных осей системы ХОУ, а  – системы
– системы 
Тогда 
так как  по определению равенства векторов (рис. 37).
по определению равенства векторов (рис. 37).
Так как  , то
, то

или

(3.23) – формулы параллельного переноса осей пдск.
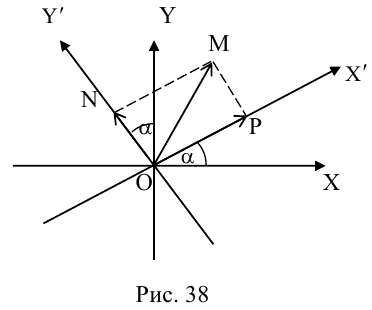
Поворот координатных осей на угол α
Поворот координатных осей на угол  .
.
Пусть “новая” пдск  получена из “старой” системы координат XOY поворотом осей ОХ и ОУ на угол
получена из “старой” системы координат XOY поворотом осей ОХ и ОУ на угол  (рис. 38) и М(х, у) – произвольная точка в системе XOY . Выясним, какими станут ее координаты в “новой” пдск.
(рис. 38) и М(х, у) – произвольная точка в системе XOY . Выясним, какими станут ее координаты в “новой” пдск.
Из рис. 38 очевидно, что
Так как 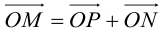 , то
, то

(3.24) – формулы поворота координатных осей на угол , выражающие старые координаты точки через новые.
Если обозначить  , то (3.24) можно переписать:
, то (3.24) можно переписать:  . Так как
. Так как  , то существует
, то существует  и
и

(3.25) – формулы поворота координатных осей на угол  , выражающие новые координаты точки через старые.
, выражающие новые координаты точки через старые.
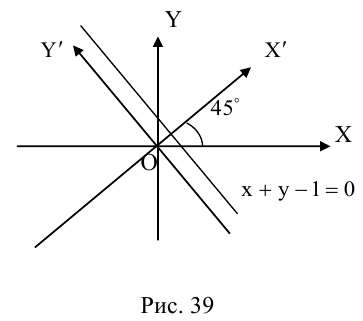
Пример №16
Каким будет уравнение прямой x + y — 1 = 0 после поворота координатных осей на угол 
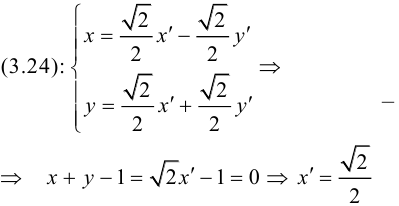
новое уравнение прямой (рис. 39).
Линейные преобразования на плоскости
Рассмотрим систему линейных уравнений:

Каждой точке плоскости M(x, y) по формулам (3.26) можно поставить в соответствие единственную точку  той же плоскости. При этом точка N называется образом точки M , а точка M – прообразом точки N . Кроме того,уравнения (3.26) линейны относительно x и y , поэтому будем говорить, что (3.26) определяют линейное преобразование плоскости в себя.
той же плоскости. При этом точка N называется образом точки M , а точка M – прообразом точки N . Кроме того,уравнения (3.26) линейны относительно x и y , поэтому будем говорить, что (3.26) определяют линейное преобразование плоскости в себя.
Преобразование (3.26) определяется матрицей  , которая называется матрицей линейного преобразования. Обозначая ,
, которая называется матрицей линейного преобразования. Обозначая ,
(3.26) можно переписать в виде  . Можно показать, что определитель
. Можно показать, что определитель  равен коэффициенту изменения площадей при линейном преобразовании (3.26). При этом
равен коэффициенту изменения площадей при линейном преобразовании (3.26). При этом  , если в результате преобразования направление обхода некоторого контура не меняется, и
, если в результате преобразования направление обхода некоторого контура не меняется, и  , если оно меняется на противоположное. Поясним это на примерах.
, если оно меняется на противоположное. Поясним это на примерах.
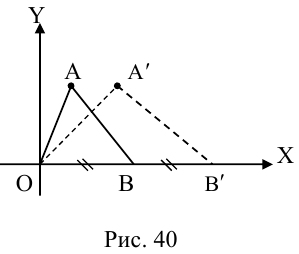
Пример №17
 – растяжение вдоль
– растяжение вдоль
оси OX в 2 раза. 
 (рис. 40).
(рис. 40).
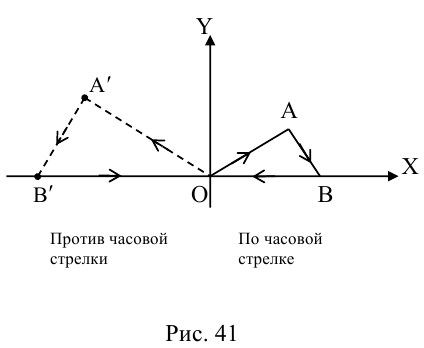
Пример №18


при этом направление обхода  от O к A , затем к B – по часовой стрелке, а соответствующее направление обхода
от O к A , затем к B – по часовой стрелке, а соответствующее направление обхода  – против часовой стрелки. Геометрически данное преобразование – растяжение вдоль OX и OY в 2 раза и отражение симметрично относительно оси OY (рис. 41).
– против часовой стрелки. Геометрически данное преобразование – растяжение вдоль OX и OY в 2 раза и отражение симметрично относительно оси OY (рис. 41).
Определение: Линейное преобразование (3.26) называется невырожденным, если 
В этом случае существует обратная матрица  и можно найти
и можно найти  . То есть, если
. То есть, если  , то не только у каждого прообраза существует единственный образ, но и наоборот: для каждого образа существует единственный прообраз. В этом случае говорят, что (3.26) устанавливает взаимно однозначное соответствие между точками плоскости, или линейное преобразование плоскости на себя.
, то не только у каждого прообраза существует единственный образ, но и наоборот: для каждого образа существует единственный прообраз. В этом случае говорят, что (3.26) устанавливает взаимно однозначное соответствие между точками плоскости, или линейное преобразование плоскости на себя.
Можно показать, что невырожденное линейное преобразование переводит прямую в прямую, а кривую второго порядка – в кривую второго порядка.
Пример №19
Пусть  преобразование вырожденное.
преобразование вырожденное.
Какими будут образы точек, лежащих, например, на прямой x + y — 1 = 0
(рис. 42)?
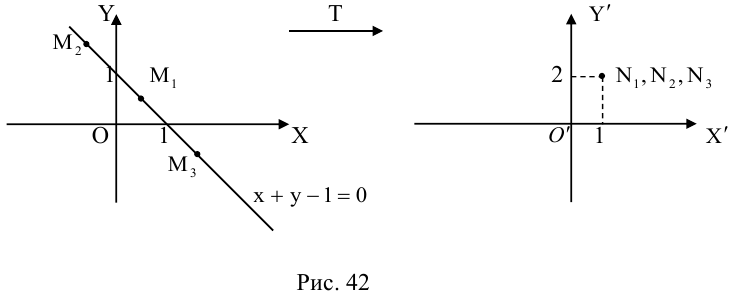
Очевидно, что если  , то есть у точки N(1,2) существует бесконечное множество прообразов: все они лежат на прямой x + y — 1 = 0. Потому данное вырожденное линейное преобразование не устанавливает взаимно-однозначного соответствия между точками плоскости.
, то есть у точки N(1,2) существует бесконечное множество прообразов: все они лежат на прямой x + y — 1 = 0. Потому данное вырожденное линейное преобразование не устанавливает взаимно-однозначного соответствия между точками плоскости.
Пример №20
Рассмотрим формулы (3.25):

Очевидно, что поворот осей пдск на угол  – линейное преобразование.
– линейное преобразование.
Так как это линейное преобразование невырожденное, то существует
Заметим, что в этом случае 
Определение: Матрица A называется ортогональной, если  .
.
Линейное преобразование, матрица которого ортогональна, называется ортогональным.
Таким образом, поворот координатных осей – ортогональное линейное преобразование.
Можно показать, что если A – ортогональная матрица, то  (доказать самостоятельно). Таким образом, в результате ортогональных линейных преобразований на плоскости площади фигур остаются неизменными.
(доказать самостоятельно). Таким образом, в результате ортогональных линейных преобразований на плоскости площади фигур остаются неизменными.
Произведение линейных преобразований
Рассмотрим матрицы  Каждая из них определяет линейное преобразование плоскости. Если M(x, y) – некоторая точка плоскости, то под действием линейного преобразования
Каждая из них определяет линейное преобразование плоскости. Если M(x, y) – некоторая точка плоскости, то под действием линейного преобразования  с матрицей B она перейдет в точку
с матрицей B она перейдет в точку 

В свою очередь точка N под действием линейного преобразования  с матрицей C перейдет в точку
с матрицей C перейдет в точку 

Такое последовательное выполнение линейных преобразований называется их произведением: 
Покажем, что произведение линейных преобразований также линейное преобразование, и найдем его матрицу. Подставим (3.27) в (3.28):

То есть

(3.29) – система линейных уравнений, а потому произведение линейных преобразований линейно. Матрица (3.29) имеет вид:

Таким образом, матрица произведения линейных преобразований равна произведению их матриц. Само же правило умножения матриц, сформулированное в гл.1, находит объяснение в этом выводе.
Приведение квадратичной формы к каноническому виду
Определение: Квадратичной формой относительно двух переменных x и y называется однородный многочлен второй степени:

Уравнение  задает на плоскости кривую второго порядка, причем, так как вместе с точкой M(x, y) , лежащей на этой кривой, ей принадлежит и точка
задает на плоскости кривую второго порядка, причем, так как вместе с точкой M(x, y) , лежащей на этой кривой, ей принадлежит и точка  , кривая симметрична относительно
, кривая симметрична относительно
начала координат, то есть является центральной кривой (эллиптического или гиперболического типа).
Предположим, что уравнение  задает в пдск ХОУ эллипс. Если
задает в пдск ХОУ эллипс. Если  , то это уравнение не является каноническим уравнением эллипса, а потому, хотя О(0, 0) – его центр, оси симметрии не совпадают с ОХ и ОУ (рис. 43). Тем не менее, заметим, что если оси системы XOY повернуть на
, то это уравнение не является каноническим уравнением эллипса, а потому, хотя О(0, 0) – его центр, оси симметрии не совпадают с ОХ и ОУ (рис. 43). Тем не менее, заметим, что если оси системы XOY повернуть на
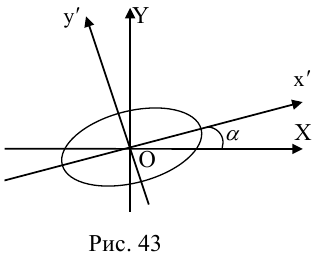
угол  , то в системе
, то в системе  эллипс будет задаваться каноническим уравнением: кривая симметрична относительно
эллипс будет задаваться каноническим уравнением: кривая симметрична относительно  . Найдем линейное преобразование, соответствующее этому повороту.
. Найдем линейное преобразование, соответствующее этому повороту.
Матрица  называется матрицей квадратичной формы (3.30).
называется матрицей квадратичной формы (3.30).
Пусть 
Вычислим 
Таким образом, квадратичная форма может быть записана в матричном виде:

Пусть x, y – координаты точек плоскости в системе XOY , а  – координаты точек плоскости в новой системе
– координаты точек плоскости в новой системе  , где кривая задается каноническим уравнением. Переход от “старых” координат к “новым” будем искать в виде
, где кривая задается каноническим уравнением. Переход от “старых” координат к “новым” будем искать в виде

(3.32) – ортогональное линейное преобразование с матрицей
По определению ортогональной матрицы

(В результате ортогонального преобразования не происходит изменение площадей фигур, то есть фигуры не деформируются.)
Чтобы узнать, как изменится матрица квадратичной формы в результате линейного преобразования (3.32), подставим (3.32) в (3.31):  (свойство 5 умножения матриц)
(свойство 5 умножения матриц)
(свойство 2 умножения матриц и равенство (3.33)) – матрица новой квадратичной формы.
Так как в “новой” системе координат кривая должна задаваться каноническим уравнением, то есть в нем должно отсутствовать произведение координат xy, то  имеет вид:
имеет вид: 
, где  – неизвестные числа. Умножим равенство
– неизвестные числа. Умножим равенство  на матрицу T слева. Так как
на матрицу T слева. Так как  , то получим:
, то получим:

По определению равных матриц имеем:
Системы уравнений (3.34), (3.35) – линейные и однородные. Они имеют нетривиальное решение, если их определители равны 0.

Это означает, что  являются решениями уравнения
являются решениями уравнения

Уравнение (3.36) называется характеристическим уравнением матрицы A (характеристическим уравнением квадратичной формы). Его решения называются собственными значениями матрицы A (квадратичной формы).
Покажем, что дискриминант квадратного уравнения (3.36) положителен, то есть любая квадратичная форма двух переменных имеет 2 различных собственных значения.
Вычислим определитель (3.36):

Дискриминант 
так как  (иначе квадратичная форма будет канонической).
(иначе квадратичная форма будет канонической).
Таким образом, коэффициентами при  в каноническом виде квадратичной формы являются ее собственные значения, то есть решения уравнения (3.36).
в каноническом виде квадратичной формы являются ее собственные значения, то есть решения уравнения (3.36).
Решим (3.36) и подставим  в (3.34). Система имеет бесконечное множество решений и пусть
в (3.34). Система имеет бесконечное множество решений и пусть  – одно их них. Так как система (3.34) однородная, то
– одно их них. Так как система (3.34) однородная, то  – тоже решение. Подберем k так, чтобы вектор
– тоже решение. Подберем k так, чтобы вектор
 был единичным:
был единичным:
Векторы  называется собственными векторами квадратичной формы, соответствующими собственному значению , или первыми собственными векторами. Их направление называется первым главным направлением квадратичной формы. Таким образом, первым собственным вектором квадратичной формы называется любое ненулевое решение системы (3.34).
называется собственными векторами квадратичной формы, соответствующими собственному значению , или первыми собственными векторами. Их направление называется первым главным направлением квадратичной формы. Таким образом, первым собственным вектором квадратичной формы называется любое ненулевое решение системы (3.34).
Аналогично подставим  в (3.35) и найдем
в (3.35) и найдем  – второй собственный вектор, соответствующий собственному значению r2 . Его направление называется вторым главным направлением квадратичной формы.
– второй собственный вектор, соответствующий собственному значению r2 . Его направление называется вторым главным направлением квадратичной формы.  – второй единичный собственный вектор, то есть
– второй единичный собственный вектор, то есть 
Можно показать, что  . Кроме того,
. Кроме того,  – первый собственный вектор, а
– первый собственный вектор, а  – второй собственный
– второй собственный
вектор, поэтому ортами “новой” системы координат  , к которой мы перейдем в результате линейного преобразования с матрицей T , являются единичные собственные векторы квадратичной формы, найденные как решения систем (3.34), (3.35). Направив оси “новой” системы координат вдоль собственных векторов
, к которой мы перейдем в результате линейного преобразования с матрицей T , являются единичные собственные векторы квадратичной формы, найденные как решения систем (3.34), (3.35). Направив оси “новой” системы координат вдоль собственных векторов  , получим систему координат, в которой квадратичная форма будет иметь канонический вид
, получим систему координат, в которой квадратичная форма будет иметь канонический вид 
ВЫВОД.
Чтобы привести квадратичную форму к каноническому виду, надо:
- Составить и решить характеристическое уравнение (3.36); его решения – собственные значения – являются коэффициентами при
 в каноническом виде квадратичной формы.
в каноническом виде квадратичной формы. - Найти единичные собственные векторы, решив (3.34) и (3.35); они будут ортами новой системы координат .При этом если ось сонаправлена с – канонический вид, который квадратичная форма имеет в системе .
 в каноническом виде квадратичной формы.
в каноническом виде квадратичной формы.  .При этом если ось
.При этом если ось сонаправлена с
сонаправлена с  – канонический вид, который квадратичная форма имеет в системе
– канонический вид, который квадратичная форма имеет в системе  .
.Приведение общего уравнения кривой второго порядка к каноническому виду
Общее уравнение кривой второго порядка имеет вид:

В результате невырожденного линейного преобразования с матрицей T квадратичная форма перейдет в квадратичную форму, линейная – в линейную, а свободный член  не изменится. Каждую группу слагаемых будем преобразовывать отдельно, а именно: найдем ортогональное преобразование, приводящее квадратичную форму к каноническому виду, затем посмотрим, как в результате этого преобразования изменится линейная форма (ортогональное преобразование в нашем случае – это поворот осей).
не изменится. Каждую группу слагаемых будем преобразовывать отдельно, а именно: найдем ортогональное преобразование, приводящее квадратичную форму к каноническому виду, затем посмотрим, как в результате этого преобразования изменится линейная форма (ортогональное преобразование в нашем случае – это поворот осей).
После поворота осей подберем параллельный перенос новой системы  так, чтобы после него уравнение кривой стало каноническим.
так, чтобы после него уравнение кривой стало каноническим.
Пример №21
Привести к каноническому виду ранее полученное уравнение параболы (стр. 58) и построить ее:

1) Составим матрицу квадратичной формы: 
2) Составим и решим характеристическое уравнение (3.36):
 – собственные значения.
– собственные значения.
3) Найдем первый единичный собственный вектор, то есть решим систему (3.34):
 – первый собственный вектор.
– первый собственный вектор.
 – первый единичный собственный вектор (орт оси
– первый единичный собственный вектор (орт оси  ).
).
4) Найдем второй единичный собственный вектор, то есть решим (3.35):
 – второй собственный вектор.
– второй собственный вектор.
 – второй единичный собственный вектор (орт оси
– второй единичный собственный вектор (орт оси  ) .
) .
Заметим, что  ,так как скалярное произведение
,так как скалярное произведение 
В полученной таким образом системе координат  , взяв несколько контрольных точек, нарисуем параболу
, взяв несколько контрольных точек, нарисуем параболу  (рxис. 44).
(рxис. 44).
Сравните эскиз (рис. 36) и данный рисунок, являющийся результатом точных расчетов.
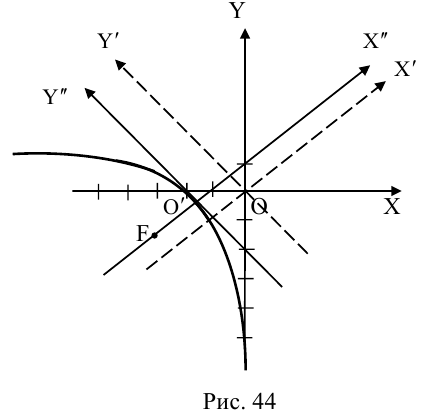
Плоскость
Покажем, что плоскость в пространстве задается в любой пдск линейным уравнением относительно трех переменных x, y, z.
Если A – некоторая точка на плоскости  – вектор, перпендикулярный ей, то, во-первых, через A перпендикулярно
– вектор, перпендикулярный ей, то, во-первых, через A перпендикулярно  проходит единственная плоскость, а, во-вторых, для любой точки
проходит единственная плоскость, а, во-вторых, для любой точки  вектор
вектор  . Таким свойством обладают только точки, лежащие на
. Таким свойством обладают только точки, лежащие на  .
.
Чтобы вывести уравнение плоскости, зададим в пространстве пдск OXYZ . В этой системе координат 
Пусть M(x,y,z) – произвольная точка на плоскости  .
.
Тогда  и
и  (рис. 45).
(рис. 45).
Вычислив скалярное произведение, получим:

Координаты точек, лежащих в плоскости  , связаны соотношением (3.38). Если же
, связаны соотношением (3.38). Если же  не перпендикулярен
не перпендикулярен  ,значит, координаты такой точки не удовлетворяют полученному уравнению. Поэтому (3.38) – уравнение плоскости, проходящей через заданную точку перпендикулярно заданному вектору. Заметим, что это уравнение линейно относительно x, y, z.
,значит, координаты такой точки не удовлетворяют полученному уравнению. Поэтому (3.38) – уравнение плоскости, проходящей через заданную точку перпендикулярно заданному вектору. Заметим, что это уравнение линейно относительно x, y, z.
Раскрыв скобки в (3.38), получим 
Обозначим  , тогда уравнение (3.38) примет вид:
, тогда уравнение (3.38) примет вид:

(3.39) – общее уравнение плоскости в пространстве, – ее нормаль.
– ее нормаль.
Определение: Любой ненулевой вектор  , перпендикулярный плоскости , называется ее нормальным вектором, или нормалью.
, перпендикулярный плоскости , называется ее нормальным вектором, или нормалью.
Особые случаи расположения плоскости
Выясним, какие особенности в расположении плоскости влечет за собой равенство нулю одного или нескольких коэффициентов в уравнении (3.39).
- координаты точки O(0,0,0) удовлетворяют уравнению, значит, плоскость проходит через начало координат.
- , так как , значит, плоскость .
- , так как .Значит, плоскость .
- так как . Значит, плоскость .
- проходит через OX .
- проходит через OY .
- проходит через OZ .
- или .
- или .
- или .
- – плоскость YOZ .
- – плоскость XOZ .
- – плоскость XOY .
 координаты точки O(0,0,0) удовлетворяют уравнению, значит, плоскость проходит через начало координат.
координаты точки O(0,0,0) удовлетворяют уравнению, значит, плоскость проходит через начало координат.  , так как
, так как  , значит, плоскость
, значит, плоскость  .
.  , так как
, так как  .Значит, плоскость
.Значит, плоскость  .
. так как
так как  . Значит, плоскость
. Значит, плоскость  .
.  проходит через OX .
проходит через OX .  проходит через OY .
проходит через OY .  проходит через OZ .
проходит через OZ .  или
или  .
.  или
или  .
.  или
или  .
.  – плоскость YOZ .
– плоскость YOZ .  – плоскость XOZ .
– плоскость XOZ .  – плоскость XOY .
– плоскость XOY . Уравнение плоскости в отрезках
Пусть плоскость  не параллельна ни одной из координатных осей и не проходит через начало координат. Тогда она отсекает на координатных осях отрезки a,b,c (рис. 46). Выведем уравнение такой плоскости.
не параллельна ни одной из координатных осей и не проходит через начало координат. Тогда она отсекает на координатных осях отрезки a,b,c (рис. 46). Выведем уравнение такой плоскости.
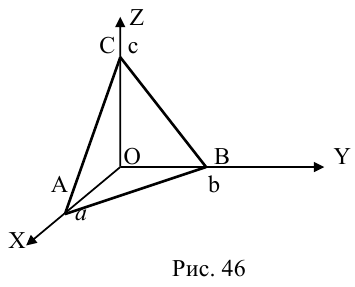
Рассмотрим  общее уравнение плоскости. Так как
общее уравнение плоскости. Так как  , то
, то  .
.
Аналогично 

Подставив А, В, С в общее уравнение, получим

(3.40) – уравнение плоскости в отрезках.
Пример №22
Вычислить объем тетраэдра, образованного плоскостями

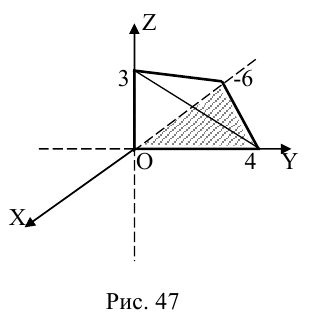
Перепишем уравнение плоскости в виде (3.40):

уравнение данной плоскости в отрезках. Поэтому (рис. 47)

Уравнение плоскости, проходящей через три точки
Пусть в некоторой пдск заданы три точки, не лежащие на одной прямой:
 . Известно, что через них проходит единственная плоскость
. Известно, что через них проходит единственная плоскость  .
.
Чтобы вывести ее уравнение, рассмотрим произвольную точку этой плоскости M(x,y,z) . Тогда  – компланарные векторы, и их смешанное произведение равно нулю:
– компланарные векторы, и их смешанное произведение равно нулю:  . Тогда по формуле (2.9) получим
. Тогда по формуле (2.9) получим

(3.41) – уравнение плоскости, проходящей через три точки.
ЗАМЕЧАНИЕ. Если точки лежат на одной прямой, то векторы  коллинеарны и их соответствующие координаты пропорциональны. Поэтому в определителе (3.41) две строки пропорциональны и по свойству 6 определителей он тождественно равен нулю, что означает, что координаты любой точки M(x,y,z) удовлетворяют уравнению (3.41). Это иллюстрация того факта, что через прямую и любую точку можно провести плоскость.
коллинеарны и их соответствующие координаты пропорциональны. Поэтому в определителе (3.41) две строки пропорциональны и по свойству 6 определителей он тождественно равен нулю, что означает, что координаты любой точки M(x,y,z) удовлетворяют уравнению (3.41). Это иллюстрация того факта, что через прямую и любую точку можно провести плоскость.
Пример №23
Написать уравнение плоскости, проходящей через точки


Угол между плоскостями
Определение: Углом между плоскостями называется любой из двух смежных двугранных углов, образованных плоскостями при их пересечении.
Если плоскости параллельны, то угол между ними равен 0 или  радиан.
радиан.
Рассмотрим плоскости  и
и
 .
.
Очевидно, 
или 
Если  –0 условие перпендикулярности плоскостей.
–0 условие перпендикулярности плоскостей.
Если  – условие параллельности плоскостей.
– условие параллельности плоскостей.
Пример №24
Найти угол между плоскостями

 плоскости перпендикулярны.
плоскости перпендикулярны.
Прямая линия в пространстве
Всякая линия в пространстве есть результат пересечения двух поверхностей. В частности прямую линию можно рассматривать как результат пересечения двух плоскостей

и

Если  не параллельна
не параллельна  , то есть
, то есть не коллинеарен
не коллинеарен  , то система уравнений
, то система уравнений

определяет прямую линию в пространстве.
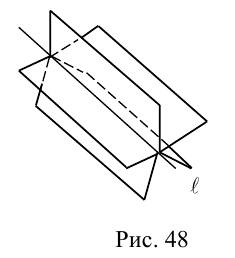
Уравнения (3.42) называются общими уравнениями прямой в пространстве.
Очевидно, одна и та же прямая может быть результатом пересечения разных пар плоскостей (рис. 48), поэтому прямую в пространстве можно задать различными способами.
Уравнения (3.42) неудобны в использовании, так как не дают представления о расположении прямой относительно выбранной системы координат.
Поэтому выведем более удобные уравнения, эквивалентные (3.42), то есть из бесконечного множества плоскостей, проходящих через данную прямую, выберем в некотором смысле более заметную пару.
Канонические уравнения прямой в пространстве
Пусть в некоторой пдск задана прямая  , проходящая через точку
, проходящая через точку  параллельно ненулевому вектору
параллельно ненулевому вектору  . Такой вектор называется направляющим вектором этой прямой.
. Такой вектор называется направляющим вектором этой прямой.
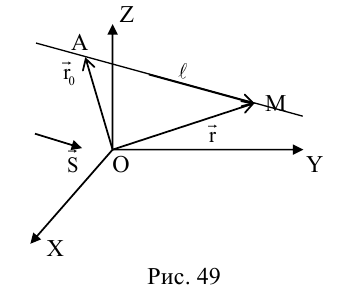
Для произвольной точки  вектор
вектор  где t – не-который числовой множитель. Кроме того,
где t – не-который числовой множитель. Кроме того,  – радиус-вектор точки M ,
– радиус-вектор точки M ,  – радиус вектор точки A
– радиус вектор точки A
(рис. 49).
Отсюда 
(3.43) – векторное уравнение прямой в пространстве. Из (3.43) получаем:

(3.44) – параметрические уравнения прямой в пространстве,  – параметр.
– параметр.
Выразим из каждого уравнения (3.44) параметр:
Тогда 
(3.45) – канонические уравнения прямой в пространстве, то есть уравнения прямой, проходящей через точку  параллельно вектору
параллельно вектору  .
.
Заметим, что уравнения (3.45) задают прямую как результат пересечения плоскостей
одна из которых параллельна OZ , а вторая – OY или как
где первая плоскость параллельна OZ , а вторая – OX .
Если прямая  проходит через две заданные точки
проходит через две заданные точки  , то
, то  направляющий вектор этой прямой, поэтому из (3.45) получим:
направляющий вектор этой прямой, поэтому из (3.45) получим:

(3.46) – уравнения пространственной прямой, проходящей через две заданные точки.
Угол между прямыми в пространстве
Рассмотрим прямые, заданные в некоторой пдск каноническими уравнениями:

и

Определение: Углом между прямыми в пространстве называется угол между двумя пересекающимися прямыми, проходящими через произвольную точку пространства параллельно данным.
Из определения следует, что  . Если
. Если  , то
, то

1) – условие перпендикулярности прямых.
– условие перпендикулярности прямых.
2) – условие параллельности прямых в пространстве.
– условие параллельности прямых в пространстве.
Пример №25
Найти угол между прямой  и прямой
и прямой  , проходящей через точки
, проходящей через точки  .
.

Заметим, что уравнение прямой  имеет вид:
имеет вид:  . В данном случае ноль в знаменателе писать принято: он означает, что направляющий вектор прямой (и сама прямая) параллелен плоскости XOZ . Эта прямая является результатом пересечения плоскостей
. В данном случае ноль в знаменателе писать принято: он означает, что направляющий вектор прямой (и сама прямая) параллелен плоскости XOZ . Эта прямая является результатом пересечения плоскостей 
Приведение общих уравнений прямой в пространстве к каноническому виду
Рассмотрим прямую  , заданную общими уравнениями (3.42) в пространстве:
, заданную общими уравнениями (3.42) в пространстве:
Привести эти уравнения к каноническому виду можно двумя способами:
- найти координаты какой-либо точки , лежащей на , ее направляющий вектор s и написать уравнения (3.45);
- найти координаты двух точек, лежащих на , и воспользоваться уравнениями (3.46).
 , лежащей на
, лежащей на 1 способ.
Координаты точки A – любое частное решение системы линейных уравнений (3.42). Эта система имеет бесконечное множество решений, так как ранги основной и расширенной матриц  , а число неизвестных
, а число неизвестных  .
.
 – направляющий вектор прямой
– направляющий вектор прямой  , поэтому
, поэтому  – нормаль плоскости
– нормаль плоскости  – нормаль плоскости
– нормаль плоскости  . Из определения векторного произведения векторов следует, что тогда
. Из определения векторного произведения векторов следует, что тогда  . Так как
. Так как  – произвольный вектор, параллельный , то будем считать, что
– произвольный вектор, параллельный , то будем считать, что  .
.
Пример №26
Привести уравнения прямой  к каноническому виду.
к каноническому виду.
Найдем какое-нибудь частное решение этой системы: пусть, например,
 , то есть точка A(1,2,0) лежит на прямой.
, то есть точка A(1,2,0) лежит на прямой.

Таким образом,  – канонические уравнения данной прямой.
– канонические уравнения данной прямой.
2 способ.
Найдем два произвольных частных решения системы уравнений, задающей прямую.
В рассмотренном примере  . Пусть теперь
. Пусть теперь

тогда  – направляющий вектор прямой, который отличается от найденного ранее только знаком. Поэтому уравнения
– направляющий вектор прямой, который отличается от найденного ранее только знаком. Поэтому уравнения  совпадают (с точностью до знака) с уже найденными.
совпадают (с точностью до знака) с уже найденными.
Угол между прямой и плоскостью
Определение: Углом между прямой и плоскостью называется угол между прямой и ее проекцией на эту плоскость.
Пусть в некоторой пдск заданы плоскость

и прямая

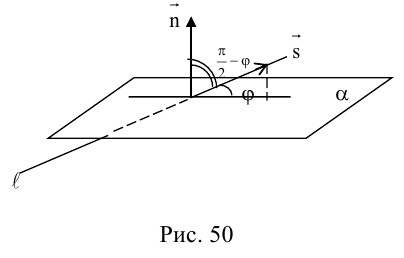
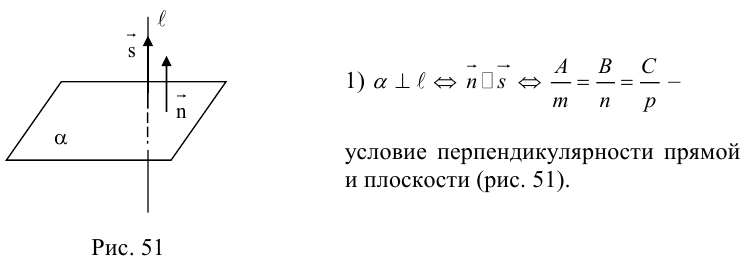
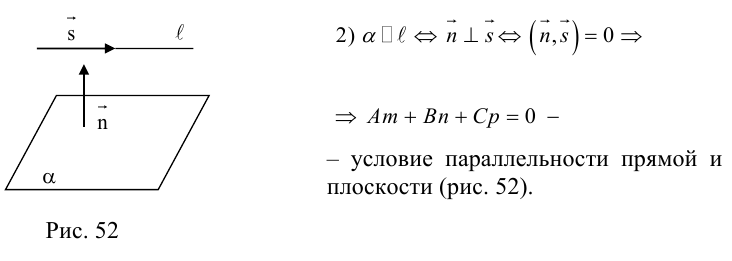
Определение общих точек прямой и плоскости
Чтобы найти общие точки прямой :  и плоскости
и плоскости , надо решить систему линейных уравнений:
, надо решить систему линейных уравнений:
Решение этой системы будет наименее трудоемким, если перейти к параметрическим уравнениям прямой (3.44):
1) Пусть  . Это значит, что прямая не параллельна плоскости, а потому они имеют одну общую точку. Из (3.47) найдем
. Это значит, что прямая не параллельна плоскости, а потому они имеют одну общую точку. Из (3.47) найдем
и по формулам (3.44) M(x,y,z) – их точку пересечения.
2) Пусть  . Это означает, что в (3.47) решений нет: выполнено условие параллельности прямой и плоскости, при этом точка
. Это означает, что в (3.47) решений нет: выполнено условие параллельности прямой и плоскости, при этом точка  , но не лежит в плоскости
, но не лежит в плоскости  , значит, прямая и плоскость общих точек не имеют.
, значит, прямая и плоскость общих точек не имеют.
3) Пусть  . Тогда любое
. Тогда любое  – решение (3.47) и система имеет бесконечно много решений: выполнено условие параллельности прямой и плоскости и точка
– решение (3.47) и система имеет бесконечно много решений: выполнено условие параллельности прямой и плоскости и точка  , лежащая на прямой, лежит в плоскости. Это значит, что прямая лежит в плоскости, то есть имеет с ней бесконечное множество общих точек.
, лежащая на прямой, лежит в плоскости. Это значит, что прямая лежит в плоскости, то есть имеет с ней бесконечное множество общих точек.
Пример №27
Найти проекцию точки  на плоскость
на плоскость  (рис. 53).
(рис. 53).
Пусть прямая  проходит через точку М перпендикулярно плоскости
проходит через точку М перпендикулярно плоскости  . Точка ее пересечения с плоскостью и будет искомой проекцией. В качестве направляющего вектора
. Точка ее пересечения с плоскостью и будет искомой проекцией. В качестве направляющего вектора  можно взять нормаль к плоскости
можно взять нормаль к плоскости  .
.
Напишем канонические уравнения прямой (3.45):
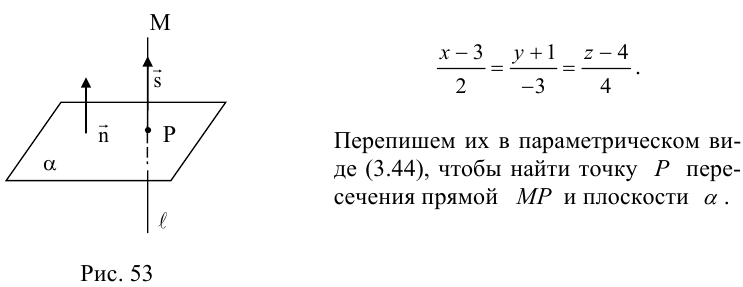
 Подставим x,y,z в уравнение плоскости:
Подставим x,y,z в уравнение плоскости:

 , то есть P 1,2,0 – искомая проекция.
, то есть P 1,2,0 – искомая проекция.
Цилиндрические поверхности
Уравнение F(x, y, z)=0 задает в пространстве некоторую поверхность.
Пусть уравнение содержит только две переменные, например, F(x,y)=0.Рассмотренное в плоскости XOY , оно задает некоторую кривую. Но ему будут удовлетворять и все точки пространства, которые проецируются в точки этой кривой, так как в уравнении отсутствует z , то есть все точки M(x,y,z) у которых х и у связаны соотношением  – произвольно.
– произвольно.
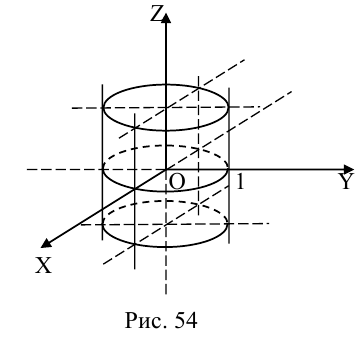
Пример №28
Построить поверхность 
На плоскости это уравнение задает окружность с центром О(0, 0) и R=1.
В пространстве ему удовлетворяют координаты всех точек, проекция которых на плоскость ХОУ лежит на этой окружности. Очевидно, что эта поверхность – круговой цилиндр
(рис. 54).
Цилиндрические поверхности бывают не только круговыми.
Определение: Цилиндрической называется поверхность, полученная движением прямой, параллельной некоторому вектору, и пересекающей при движении некоторую кривую. При этом движущаяся прямая называется образующей, а кривая, которую она пересекает, называется направляющей цилиндрической поверхности.
Для поверхности  образующая параллельна оси OZ (так как в уравнении z отсутствует), а направляющей является окружность в плоскости XOY .
образующая параллельна оси OZ (так как в уравнении z отсутствует), а направляющей является окружность в плоскости XOY .
ВЫВОД. Если уравнение поверхности содержит только две переменные, то оно задает цилиндрическую поверхность. У поверхности F(y,z) ,образующая параллельна OX , а направляющая лежит в плоскости YOZ . Для поверхности F(x,z) ,образующая параллельна OY , направляющая в плоскости XOZ .
Пример №29
Построить и назвать поверхности  Эти уравнения задают цилиндрические поверхности. В первом случае направляющей является парабола в плоскости YOZ , а образующая параллельна OX (рис. 55). Во втором – образующая синусоида в плоскости XOZ , образующая параллельна OY (рис. 56).
Эти уравнения задают цилиндрические поверхности. В первом случае направляющей является парабола в плоскости YOZ , а образующая параллельна OX (рис. 55). Во втором – образующая синусоида в плоскости XOZ , образующая параллельна OY (рис. 56).
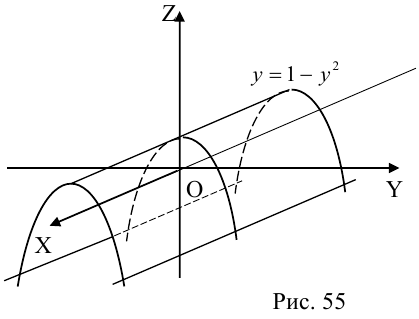
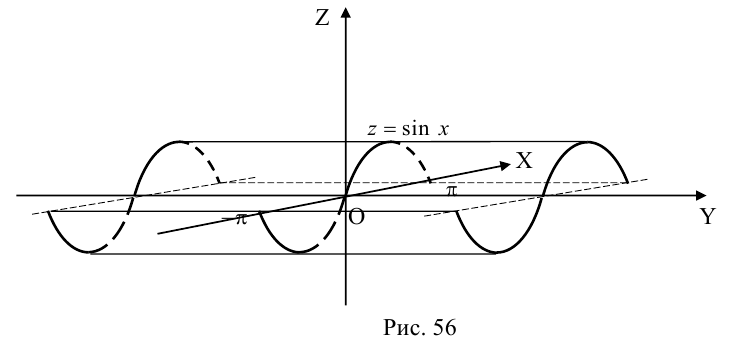
Поверхности вращения
Определение: Поверхностью вращения называется поверхность, полученная в результате вращения плоской кривой вокруг оси, лежащей в ее
плоскости.
Из определения следует, что сечением такой поверхности любой плоскостью, перпендикулярной оси вращения, является окружность.
Пусть в плоскости YOZ задана кривая 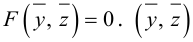 – координаты точки в плоской системе координат YOZ . Эта кривая вращается вокруг оси OZ . Выведем уравнение поверхности вращения.
– координаты точки в плоской системе координат YOZ . Эта кривая вращается вокруг оси OZ . Выведем уравнение поверхности вращения.
Пусть M(x,y,z) – произвольная точка на поверхности,  , z– центр окружности сечения, проходящего через точку M , а
, z– центр окружности сечения, проходящего через точку M , а  – точка, лежащая на кривой и одновременно в рассматриваемом сечении (рис. 57).
– точка, лежащая на кривой и одновременно в рассматриваемом сечении (рис. 57).
Тогда  – радиусы сечения.
– радиусы сечения.
Но 
Таким образом, уравнение поверхности вращения получим, если в уравнении кривой  заменим на
заменим на  – на z. Тогда получим:
– на z. Тогда получим:
 – уравнение поверхности вращения (OZ – ось вращения).
– уравнение поверхности вращения (OZ – ось вращения).
Очевидно, что если кривая F(y,z)=0 вращается вокруг OY , то уравнение
поверхности вращения имеет вид: 
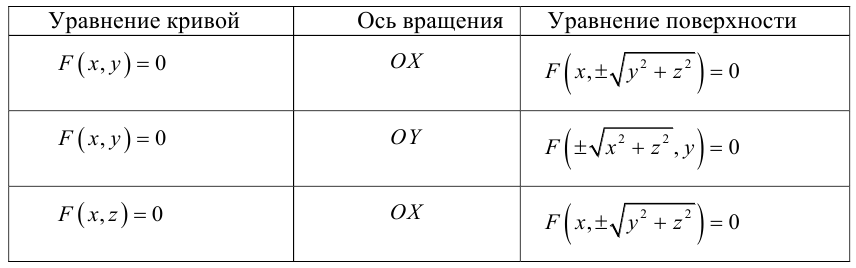
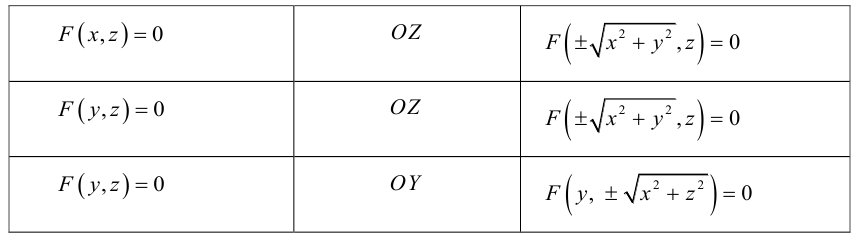
Некоторые поверхности второго порядка
1. Пусть эллипс  вращается вокруг оси OY .
вращается вокруг оси OY .
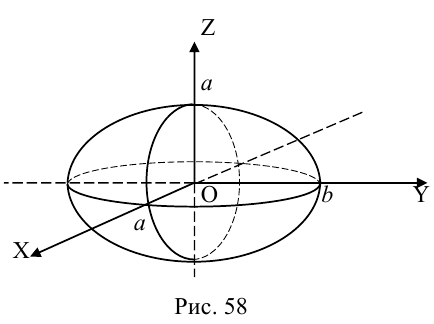
Полученная поверхность является поверхностью второго порядка, так ее уравнение  – второй степени относительно переменных x,y,z . Она называется эллипсоидом вращения (рис. 58).
– второй степени относительно переменных x,y,z . Она называется эллипсоидом вращения (рис. 58).
Поверхность, задаваемая уравнением  , называется трехосным эллипсоидом.
, называется трехосным эллипсоидом.
2. Если гипербола  вращается вокруг оси OZ , то уравнение
вращается вокруг оси OZ , то уравнение
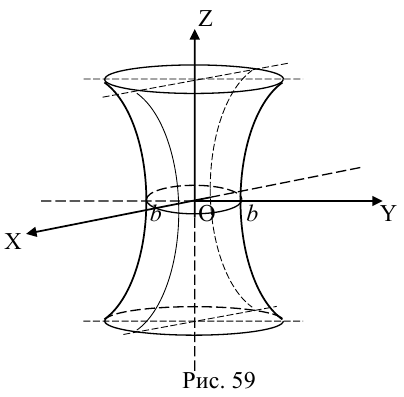
поверхности вращения имеет вид
или
Такая поверхность называется однополостным гиперболоидом вращения (рис. 59).
3. Если гипербола  вращается вокруг оси OY , то уравнение поверхности имеет вид
вращается вокруг оси OY , то уравнение поверхности имеет вид  . Такая поверхность называется двуполостным гиперболоидом вращения (рис. 60).
. Такая поверхность называется двуполостным гиперболоидом вращения (рис. 60).
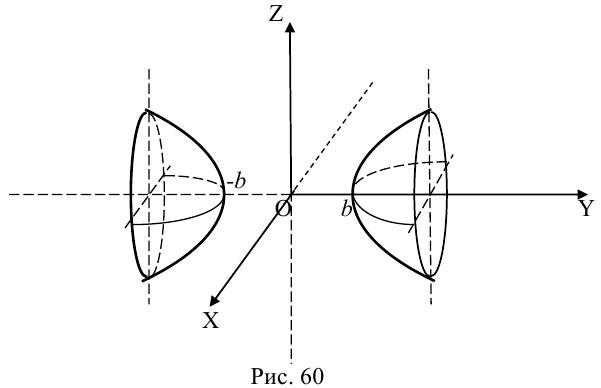
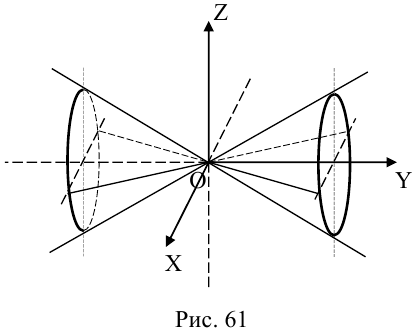
4. Если пара пересекающихся прямых  вращается вокруг оси OY , то получается конус вращения с уравнением
вращается вокруг оси OY , то получается конус вращения с уравнением  или
или  (рис. 61).
(рис. 61).
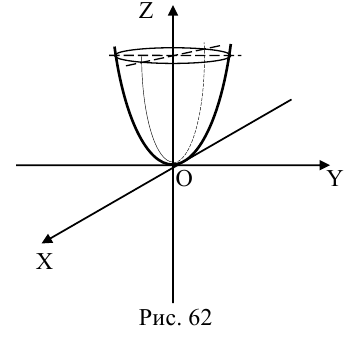
5. При вращении параболы  вокруг оси OZ получается поверхность
вокруг оси OZ получается поверхность  , которая называется эллиптическим параболоидом вращения (рис. 62).
, которая называется эллиптическим параболоидом вращения (рис. 62).
Лекции по предметам:
- Математика
- Алгебра
- Линейная алгебра
- Векторная алгебра
- Геометрия
- Высшая математика
- Дискретная математика
- Математический анализ
- Теория вероятностей
- Математическая статистика
- Математическая логика