Ох эти три буквы… Спокойно, всё пристойно, я про CAN.

CAN шина, что же это такое? Много информации читал, но нихрена не понимал. А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN


Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN

Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN


Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:

Вот такие пироги. Наткнулся тут : quantexlab
Источник
CAN-технология BOSCH в диагностике автомобилей

CAN Технологии
Применяемая на автомобилях система CAN (Controller_Area_Network) позволяет установить связь между отдельными электронными блоками управления. При эксплуатации автомобиля и при диагностике его агрегатов эта система предоставляет возможность использования новых функций, которые не могут быть возложены на отдельно действующие блоки управления.
Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронные блоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса. Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть, связывающая блоки управления). Применение системы CAN на автомобиле дает следующие преимущества:
Обмен данными между блоками управления производится на унифицированной базе. Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.
Независимо действующие системы, например, система курсовой стабилизации ESP, могут быть реализованы с меньшими затратами.
Упрощается подключение дополнительного оборудования.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
Диагностика электронных блоков управления производится посредством кабеля «К».
Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производится через шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). В данном случае речь идет о так называемом виртуальном кабеле «К». В будущем необходимость в кабеле «К» должна отпасть.
Можно проводить одновременную диагностику нескольких блоков управления, входящих в систему.
CAN
Промышленная сеть CAN (Controller Area Network) была создана в конце 80-х годов фирмой Bosch как решение для распределенных систем, работающих в режиме реального времени. Первая реализация CAN применялась в автомобильной электронике, однако сейчас CAN находит применение практически в любых типах машин и промышленных установок, от простейших бытовых приборов до систем управления ускорителями элементарных частиц. В настоящий момент CAN-протокол стандартизован в международном стандарте ISO 11898.
Основные положения стандарта CAN.
В качестве среды передачи в CAN используется дифференциальная линия связи — витая пара, сигналы по которой передаются в дифференциальном режиме.
Для контроля доступа к среде передачи используется метод недеструктивного арбитража.
Данные передаются короткими (максимальная длина поля данных — 8 байт) пакетами, которые защищены контрольной суммой.
В CAN отсутствует явная адресация сообщений. Вместо этого каждый пакет снабжен полем арбитража (идентификатор+RTR-бит), которое задает приоритет сообщения в сети.
CAN имеет исчерпывающую схему контроля ошибок, которая гарантирует повторную передачу пакета, в случае возникновения ошибок передачи/приема сообщения.
В CAN существует способ автоматического устранения узла, являющегося источником ошибочных пакетов в сети.
CAN контроллеры.
Протокол CAN полностью реализован аппаратно — в виде микросхем- CAN контроллеров или в виде стандартного периферийного устройства в составе микросхемы- микроконтроллера. Все производители современных микроконтроллеров по крайней мере в одном из семейств имеют микроконтроллеры со встроенным периферийным одним или несколькими CAN-контроллерами. Таким образом, сегодня, СAN-контроллер является таким же стандартным периферийным устройством как контроллер SPI, I2C или UART.
Что такое CAN-шина
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.

Как это исполнено физически
Физически CAN-шина – система из специального кабеля с разветвителями для подключения электронных блоков и конечных устройств-терминаторов (резисторов).

Витая пара
Чаще всего шина CAN – скрученные (витые) пары проводов (по 30 витков на один погонный метр) с разветвителями для подключения ЭБУ (ECU) и конечными резисторами-терминаторами с номинальным сопротивлением 120 Ом на концах шины.
Сколько CAN-шин может быть на ТС
На ТС экологического уровня Евро-3 и выше может быть от 1 до 6 и более шин CAN, которые могут обозначаться как M-CAN, T-CAN, I-CAN, H-CAN, A-CAN, EBS-CAN и т.д.

Как найти CAN-шину
Признаками шины М-CAN и Т-CAN могут быть, например:
• наличие диагностического разъема OBD II;
• цвет и сечение проводов витых пар;
• связь витых пар с контактами в разъемах OBD II и ЭБУ.


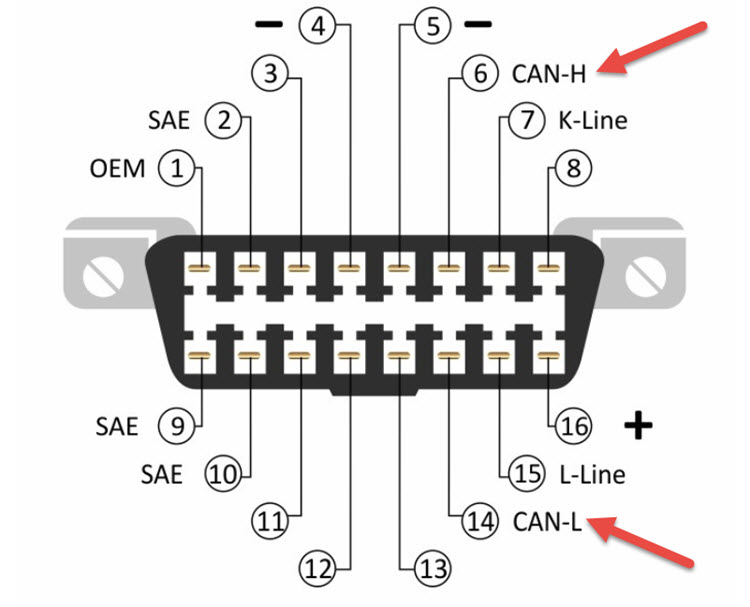
Диагностический разъём OBD II и его распиновка
На большинстве ТС после 2003 года используется диагностический разъем OBD II или DLC (Diagnostic Link Connector), который находится под панелью приборов.


Как будем искать CAN-шину
С помощью мультиметра можно проверить любую витую пару проводов, чтобы убедиться в следующем:
1. Является ли проверяемая витая пара вообще CAN-шиной? (Проверка импеданса);
2. Если витая пара является CAN-шиной, то передаются ли в ней какие–либо сообщения? Проверка работоспособности);
3. Находится ли CAN-шина в работоспособном состоянии и какая из линий шины является CAN-L, а какая – CAN-H?
Внимание! Неосторожное обращение с включенной
CAN-шиной может привести к фиксации в ней ошибок!
Проверка импеданса
Проверка импеданса (полного сопротивления)

ВНИМАНИЕ!
Проверка должна производиться при полностью выключенном питании бортовой сети (выключенной массе).
Контрольное значение должно быть в пределах 60 Ом.
Проверка работоспособности CAN-шины
Находится ли CAN-шина в рабочем состоянии?
ВНИМАНИЕ! Проверка производится при включенном замке зажигания, работающем двигателе, нажатии и отпускании педали подачи топлива между проводами витой пары.
Контрольное значение напряжения должно быть в пределах 1,2-3,0 В.
Определение CAN-H и CAN-L
Какой из проводов является CAN-H, а какой CAN-L?
ВНИМАНИЕ! Проверка производится в состоянии рецессии (при включенном главном выключателе АКБ (кнопке массы), замок зажигания выключен!) и в доминантном состоянии (при включенном замке зажигания в положение «Приборы», при работающем и не работающем двигателе).
Проверка с помощью осциллографа
Учитывая возможные отклонения уровня напряжения от номинальных значений, состояние рецессии можно определить только с помощью осциллографа.

Цвет оболочки и цветовая маркировка проводов

CAN-шина. Что можно увидеть?
В зависимости от того, какую информацию заложил в CAN-шину производитель, могут распознавать:
Способы подключения:
Контактный способ:
Достоинства:
• просто и дешево;
• можно работать на считывание и передачу.
Недостатки:
• может оказывать мешающее влияние на CAN-шину; проблемы с возникновением и фиксацией ошибок;
• Проблемы с гарантией на ТС.
Безконтактный способ (CANCrocodile):

Достоинства:
• не оказывает мешающего воздействия на CAN-шину.
Недостатки:
• можно работать только на считывание.
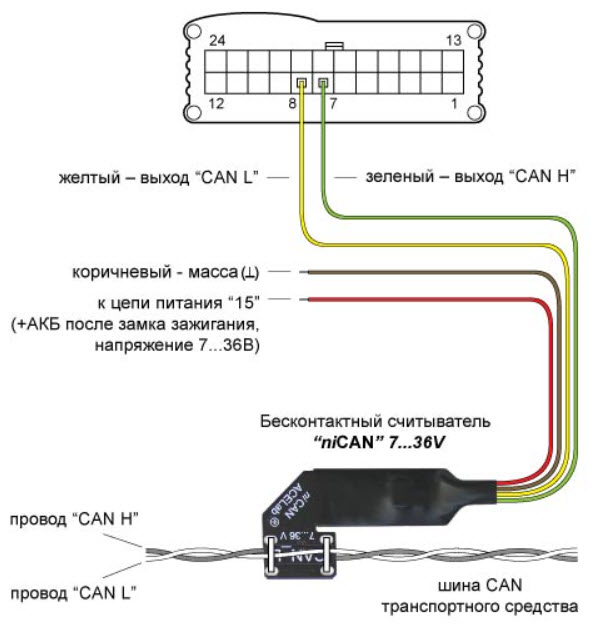
Бесконтактныe считыватели Crocodile
CAN Crocodile – устройство для бесконтактного считывания данных с CAN-шины автомобиля. CAN Crocodile применяется для подключения к шине CAN систем GPS/ГЛОНАСС мониторинга, которые получают информацию о режимах работы двигателя, состоянии датчиков, уровне топлива, наличии неисправностей и т.д. CAN Crocodile не нарушает изоляцию проводов CAN и «слушает» обмен по шине с помощью специального беспроводного приемника. Применение CAN Crocodile абсолютно безопасно для автомобиля (!), незаметно для работы бортового компьютера, диагностического сканера и других электронных систем. Особенно актуально применение CAN Crocodile для гарантийных автомобилей, в которых подключение каких-либо электронных устройств к шине CAN часто служит поводом для снятия с гарантии.

Бесконтактным способом – без нарушения изоляционной оболочки проводов и электрического контакта.
Не нарушает изоляцию;
Не влияет на работу CAN-шины;
Не занимает диагностический разъём
Источник
Еще раз о диагностике CAN-шины
 В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:

Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.


На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:

Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :



Давайте обмерим ее с помощью линеек.
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.

Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:

Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :

Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:

Источник
Принцип работы и диагностика CAN-шины в автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Источник
Автомобили давно уже стали не просто компьютерами на колёсах, а скорее компьютерными сетями. Передача механических, гидравлических или пневматических усилий между узлами и механизмами со временем превратилась в обмен электрическими сигналами, а сейчас и в информационное взаимодействие.
Содержание статьи:
- 1 Зачем нужна в машине CAN-шина
- 2 Схема и место расположения КАН-интерфейса
- 3 Принцип работы
- 4 Виды CAN-шин
- 5 Как подключиться и сделать диагностику автомобиля
- 6 Неисправности
- 7 Плюсы и минусы встроенных шин

Наряду с массовым внедрением дешёвых электронных комплектующих, потребовалось разработать достаточно сложное и надёжное сетевое физическое и программное обеспечение.
Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
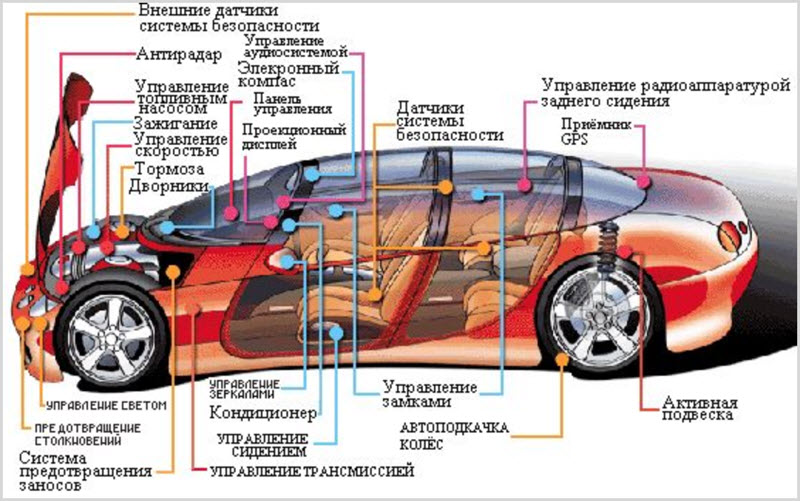
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
По теме: Как работает автопилот в современных автомобилях
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
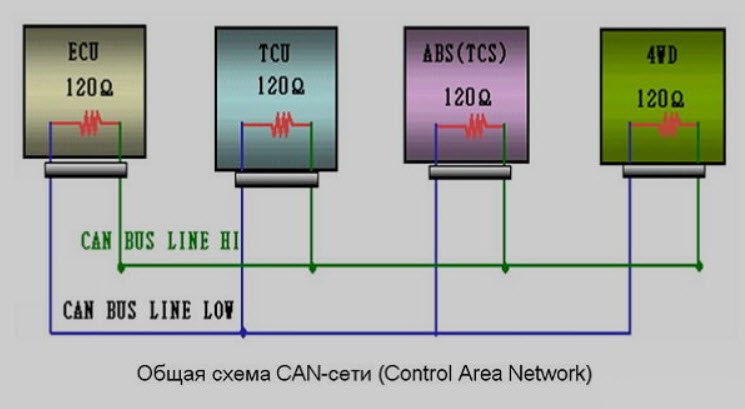
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Схема и место расположения КАН-интерфейса
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.

Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Это интересно: Почему появляется вибрация в салоне автомобиля
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Виды CAN-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
- пропадание питания отдельных устройств;
- повреждения проводки и разъёмов;
- отказ контроллеров.
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
- имеется автоматический контроль проходящей информации на ошибки;
- дифференциальная передача сигналов и использование витой пары даёт хорошую скорость и защиту от помех;
- стандартизация протоколов упрощает диагностику и поиск неисправностей;
- построение системы приоритетов упрощает проектирование;
- все устройства функционально закончены и универсальны.
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
![]() Загрузка…
Загрузка…
CAN шина представляет собой интерфейс, использующийся для более упрощенного управления транспортным средством. Это обеспечивается благодаря обмену данными между разными системами, передача информации производится в зашифрованном виде.
Содержание
- 1 Где находится CAN-шина?
- 2 Технические характеристики
- 3 Назначение и функции кан-шины
- 4 Устройство и принцип работы
- 5 Преимущества и недостатки
- 6 Разновидности и маркировка
- 7 Подключение сигнализации своими руками
- 7.1 Необходимые приборы и инструменты
- 7.2 Пошаговая инструкция
- 8 Работа с терминалом
- 8.1 Варианты настройки
- 9 Режимы работы
- 10 Настройка мониторингового ПО
- 11 Скачать бесплатно инструкцию по установке и пользованию в формате PDF
- 12 Можно ли сделать анализатор своими руками?
- 12.1 Фотогалерея
- 13 Сколько стоит?
- 14 Видео «Работа с CAN-шиной»
[ Раскрыть]
[ Скрыть]
Модуль CAN в машине являет собой сеть датчиков и контроллеров, которые предназначены для объединения всех управляющих устройств в одну систему.
Эта автомобильная технология используется как колодка, с которой можно соединять следующие управляющие блоки:
- «сигналки» — к противоугонной системе может подключаться модуль автоматического запуска двигателя;
- антиблокировочной системы «АБС»;
- механизмов безопасности, в частности, подушек и их датчиков;
- системы управления силовым агрегатом автомобиля;
- приборной комбинации;
- системы круиз-контроля;
- кондиционера и отопительного узла;
- системы управления автоматической трансмиссией и т. д.
CAN-модуль — это устройство, место монтажа которого может отличаться производителем транспортного средства.
Если неизвестно, где расположен интерфейс, этот момент уточняется в сервисной документации к авто, он обычно устанавливается:
- под капотом автомобиля;
- в салоне транспортного средства;
- под контрольной комбинацией.
Технические характеристики
Описание основных свойств системы диагностики и анализа CAN:
- общая скорость технологии при передаче пакетных данных варьируется в районе 1 мб/с;
- если информация передается между блоками управления, то скорость отправки составит около 500 кб/с;
- при функционировании устройства в режиме «Комфорт» передача данных осуществляется при 100 кб/с.
Назначение и функции кан-шины
Если правильно устанавливать и выполнять подсоединение проводов к интерфейсу, то можно обеспечить следующие опции:
- уменьшение параметра воздействия внешних помех на функционирование основных и дополнительных механизмов и узлов;
- возможность выполнить соединение и настраивать любые электронные приборы, в том числе охранные комплексы;
- простой принцип подключения и функционирования дополнительных электронных устройств и приборов, которые имеются в авто;
- более быстрая процедура передачи информации на определенное оборудование и механизмы авто;
- возможность отправки и получения цифровых данных одновременно, а также анализ информации;
- оперативная настройка и подключение опции дистанционного пуска ДВС.
Подробнее о назначении и общих характеристиках CAN-модуля рассказал канал «Crossover 159».
Устройство и принцип работы
По конструкции данный интерфейс выполнен в виде модуля в пластмассовом корпусе или колодки для подсоединения проводников. Цифровая шина включает в себя несколько кабелей CAN. Подключение этого устройства к бортовой сети осуществляется посредством одного проводника.
Шина работает по принципу отправки данных в закодированном виде. Каждое передающееся сообщение обладает специальным уникальным идентификаторов. Может быть информация: «скорость передвижения авто составляет 50 км/ч», «температура охлаждающей жидкости 90 градусов Цельсия» и т. д. При отправке сообщений все электронные блоки получают данные, проверяющиеся идентификаторами. Если информация имеет отношение к определенному модулю, то она обрабатывается, если нет — то игнорируется.
В зависимости от модели, длина идентификатора интерфейса может быть 11 или 29 бит.
Каждое устройство производит считывание информации, передающейся в шину. Передатчик, обладающий более низким приоритетом, должен отпустить шину, так как доминантный уровень искажает его передачу. Если приоритет передающихся пакетов будет более высоким, то он не трогается. Устройство, которое при отправке сообщений потеряло связь, через определенный временной интервал восстановит ее автоматически.
Работа CAN-шины возможна в нескольких режимах:
- Автономный, фоновый или спящий. При включении данного режима все основные агрегаты и узлы выключены и двигатель не заведен. На шину все равно подается напряжение от бортовой сети. Его значение небольшое, что дает возможность не допустить разряда АКБ.
- Пробуждение или запуск интерфейса. В данном режиме устройство начинает работу, это происходит при включении системы зажигания. Если автомобиль оснащен клавише Старт/Стоп, то CAN-шина начинает работу при ее нажатии. Производится включение функции стабилизации напряжения, в результате чего питание начинает поступать на контроллеры и датчики.
- Включение активного режима приводит к началу процесса обмена информацией между исполнительными механизмами и регуляторами. Величина напряжения в сети возрастает, так как шина может потреблять до 85 мА тока.
- Режим отключения или засыпания. При остановке двигателя автомобиля все агрегаты и механизмы, подключенные по CAN-интерфейсу, выключаются. Питание на них перестает подаваться.
Пользователь Valentin Belyaev подробно рассказал о принципе действия цифрового интерфейса.
Преимущества и недостатки
Если автомобиль оснащен цифровым интерфейсом, это обеспечивает следующие плюсы:
- Простота монтажа сигнализации на транспортное средство. Наличие CAN-шины в авто позволяет обеспечить более быстрый и упрощенный алгоритм подключения охранной системы.
- Высокая скорость отправки информации между агрегатами и системами, что обеспечивает быстродействие узлов.
- Хорошая устойчивость к воздействию помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить образования ошибок при отправке и приеме информации.
- Цифровой интерфейс, работая в активном режиме, выполняет разброс скорости по различным каналам самостоятельно. Благодаря этому все системы работают максимально оперативно.
- Безопасность CAN-шины. При попытке получения несанкционированного доступа к автомобилю система может произвести блокировку узлов и агрегатов.
Минусы:
- Некоторые системы обладают ограничениями по объему передающейся информации. Если автомобиль сравнительно новый и оборудован разными электронными устройствами, это приводит к росту нагрузки на канал передачи данных. В результате время отклика увеличивается.
- Большинство передающейся информации по цифровому интерфейсу имеет определенное назначение. На полезные данные в системе предусмотрена небольшая часть трафика.
- Возможна проблема отсутствия стандартизации. Это часто происходит при применении протоколов высших уровней.
Разновидности и маркировка
По типу идентификаторов такие устройства делятся на два вида:
- CAN2, 0A. Это маркировка интерфейсов, которые могут работать в 11-битном формате передачи информации. Данная разновидность устройств не в состоянии определять ошибки импульсов от блоков, которые работают с 29 бит.
- CAN2, 0B. Это маркировка шин, работающих в формате 11 бит. Основная особенность заключается в возможности передачи информации на блоки управления при выявлении 29-битного идентификатора.
В зависимости от области применения, шины разделяются на три класса:
- Для двигателя транспортного средства. При подключении шины обеспечивается максимальная скорость передачи данных и связи между управляющими устройствами. Отправка информации осуществляется по дополнительному каналу. Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д.
- Цифровые интерфейсы класса Комфорт. Этот класс шин предназначен для взаимодействия с любыми устройствами данного типа. Интерфейс используется для работы с системами электронного изменения положения электрозеркал, узла обогрева кресел, управления люком и т. д.
- Информационно-командные устройства. Они характеризуются аналогичной скоростью при отправке данных. Такие шины обычно применяются для связи между системами, которые требуются для обслуживания автомобиля.
Канал «Diyordie» рассказал о назначении цифрового интерфейса, а также о его разновидностях в автомобиле.
Подключение сигнализации своими руками
Чтобы подключить охранный комплекс к цифровому интерфейсу, надо знать место установки микропроцессорного модуля управления сигнализаций. Это устройство устанавливается под приборной комбинацией машины. Возможен монтаж блока за вещевым ящиком или аудиосистемой.
Необходимые приборы и инструменты
Предварительно надо подготовить:
- тестер для проверки напряжения — мультиметр;
- нож;
- изоленту;
- отвертку с крестовым наконечником.
Пошаговая инструкция
Установка выполняется так:
- Приступая к задаче, надо убедиться в работоспособности противоугонного комплекса. В случае, когда монтаж системы не был выполнен, надо подключить все устройства к блоку управления, а его — к аккумулятору.
- Производится поиск основного кабеля, который идет на цифровой интерфейс. Этот провод всегда толстый и обычно имеет оранжевую оболочку.
- Микропроцессорный модуль противоугонной системы надо подключить к этому проводнику. Для осуществления задачи применяется колодка цифровой шины.
- Если блок управления охранной системы не был установлен, производится его монтаж. Он должен быть размещен в скрытом месте, не подверженном воздействию влаги. При монтаже модуль надежно фиксируется с помощью пластиковых стяжек или саморезов.
- Все места соединения проводов надо заизолировать с применением термоусадочных трубок либо изоленты. После подключения производится диагностика выполненных действий. Если возникли проблемы, надо воспользоваться мультиметром для поиска поврежденного участка.
- На последнем этапе необходимо произвести проверку и настройку всех каналов передачи данных. Если имеются дополнительные каналы, они также настраиваются.
Канал «Гаражный любитель» подробно рассказал об установке и подключении противоугонного комплекса Старлайн с CAN-шиной.
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
- Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
- BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса. Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
- TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
Режимы работы
Существует несколько режимов функционирования терминала:
- FMS — в нем автовладелец может узнать общий расход горючего, обороты, пробег транспортного средства, нагрузку на оси, температуру силового агрегата. Допускается получение данные об объеме горючего в баке. Для работы в данном режиме выполняется вход в меню выбора типа фильтров программы «Конфигуратор». Указывается тип режима FMS, скорость цифрового интерфейса, после чего нажимается кнопка «Применить».
- Режим прослушки используется для получения сообщений, передающий через цифровой интерфейс. Чтобы работать с ним, надо зайти в программе в настройки шины CAN и выбрать один из рабочих параметров. Это может быть скорость интерфейса или время ожидания, тип фильтра в данном случае не играет роли. После указания параметров «кликается» клавиша «Прослушать».
- Для привязки информации, полученной посредством прослушивания цифрового интерфейса, используются пользовательские фильтры. После прослушки данных надо выбрать тип фильтрующей технологии (для 11 или 29 бит). Расшифровка данных производится в соответствии с технической документацией.
- Режим тестирования OBD2 используется для сканирования скорости отправки информации, а также класса идентификатора. Чтобы запустить эту функцию, автовладельцу надо подключиться напрямую к цифровому интерфейсу или диагностическому разъему. Включение режима осуществляется посредством входа в меню «Настройка» и выбора опции «Тест OBD2». В результате терминалом начнется отправка запросов с конкретными идентификаторами на различных скоростях интерфейса. Во вкладке «Устройство» можно ознакомиться с извлеченной и расшифрованной информацией.
Настройка мониторингового ПО
После успешного подключения терминала надо произвести диагностику правильности отправки информации. Эти данные передаются на сервер мониторинга.

Скачать бесплатно инструкцию по установке и пользованию в формате PDF
Загрузить сервисное руководство по монтажу и эксплуатации по ссылкам в таблице.
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.


Сколько стоит?
Примерные цены на покупку КАН-устройств приведены в таблице.
| Наименование | Цена, руб |
| CAN-шина | 2000-5000 |
| Цена актуальная для трех регионов: Москва, Челябинск, Краснодар. |
Видео «Работа с CAN-шиной»
Канал «CAN-Hacker Automotive Data Bus Sollutions» показал способ работы с цифровым интерфейсом на примере автомобиля Рено Каптюр.
CAN шина представляет собой интерфейс, использующийся для более упрощенного управления транспортным средством. Это обеспечивается благодаря обмену данными между разными системами, передача информации производится в зашифрованном виде.
- 8.1 Варианты настройки
- 12.1 Фотогалерея
[ Раскрыть][ Скрыть]

Модуль CAN в машине являет собой сеть датчиков и контроллеров, которые предназначены для объединения всех управляющих устройств в одну систему.
Эта автомобильная технология используется как колодка, с которой можно соединять следующие управляющие блоки:
- «сигналки» — к противоугонной системе может подключаться модуль автоматического запуска двигателя;
- антиблокировочной системы «АБС»;
- механизмов безопасности, в частности, подушек и их датчиков;
- системы управления силовым агрегатом автомобиля;
- приборной комбинации;
- системы круиз-контроля;
- кондиционера и отопительного узла;
- системы управления автоматической трансмиссией и т. д.
CAN-модуль — это устройство, место монтажа которого может отличаться производителем транспортного средства.
Если неизвестно, где расположен интерфейс, этот момент уточняется в сервисной документации к авто, он обычно устанавливается:
- под капотом автомобиля;
- в салоне транспортного средства;
- под контрольной комбинацией.
Как я добавил функции автомобилю по шине CAN, не умея программировать

- Способ передачи видео с фронтальной камеры, которую я добавлю.
- Способ отображения на экране картинки с камеры заднего вида в любое время.
Видеочасть была простой. Из предыдущего опыта я знал, что можно сделать видеомикшер на реле.
Запуск на экране оказался более сложным, и после некоторого расследования я пришёл к выводу, что машина должна подавать сигнал от камеры заднего вида на экран через какую-то шину данных.
У Chevrolet две разные шины данных. Первая — это стандартная CAN, быстрая (500 Кбит/с) и надёжная, она используется для критических данных. Вторая — то, что GM называет LAN (GMLAN), более старая и медленная шина (33,3 Кбит/с), которая используется для данных, не связанных с безопасностью.
Мне нужен был способ прослушивать трафик по CAN, то есть снифер. Для этой цели невероятно полезно устройство PCAN.

Peak Can (PCAN) представляет собой USB-устройство, способное перехватывать и передавать сообщения. Благодаря программному обеспечению Pcan View можно начинать работу без особого обучения.
Поскольку камера заднего вида менее важна для безопасности, чем другие компоненты, я предположил, что искомые данные, скорее всего, будут на шине GMLAN.
Самая простая точка доступа — разъём OBD2. Я подключил Peak Can к шине GMLAN, запустил программное обеспечение — и сразу началось прослушивание трафика.
Цель состояла в том, чтобы перепроектировать вызов камеры заднего вида. Для этого с включённым снифером я повёл машину задним ходом, чтобы она включила дисплей, а затем несколько раз попробовал парковался. На протяжении всего этого процесса я заметил один ID с сообщениями, которые последовательно имитировали мои действия.
Тогда я припарковался и через Pcan View попытался передать то же самое сообщение, которое я видел, когда включался и выключался дисплей. В мгновение ока я уже взаимодействовал с шиной.
Передача сообщения через PCAN
Впрочем, я не планировал постоянно ездить с ноутбуком. Нужен был способ автоматизировать эти функции — и здесь пригодилась Arduino. Возможность напрямую получать питание 12V в сочетании с большим количеством ресурсов и поддержки в интернете сделала этот выбор очевидным.
В дополнение к Arduino для завершения проекта мне понадобилось два компонента: модуль CAN и модуль реле. По сути, Arduino — это мозг, запускающий и выполняющий код. Модуль CAN предоставляет возможность взаимодействовать с шиной данных, а реле обеспечивает питание фронтальной камеры, а также действует как видеомикшер между ней и камерой заднего вида.

После добавления и настройки соответствующих библиотек Arduino установил связь с автомобилем.
Прослушивание трафика через Arduino
Поскольку я уже знал, что могу запустить дисплей, то начал думать о том, КАК это сделать. Первоначальная идея состояла в том, чтобы установить на панели специальную кнопку мгновенного вызова, но я начал думать: «А что ЕЩЁ в сети можно использовать в качестве триггера?»
В ходе экспериментов я обнаружил, что по шине GMLAN также передаются сообщения с ID, соответствующим кнопке «Отмена круиз-контроля». Это было идеально, потому что круиз-контроль включается на скоростях более 65 км/ч, когда я буду использовать переднюю камеру, а на скоростях ниже 15 км/ч будет включаться камера заднего вида, чтобы помочь с парковкой, так что они никогда не будут перекрываться. После написания некоторого кода я смог заставить Arduino распознать, когда нажимается кнопка отмены круиз-контроля.
Распознавание однократного нажатия кнопки
Однако я не хотел, чтобы камера активировалась каждый раз, когда я отменяю круиз-контроль, поэтому я решил, что лучший подход — превратить её (по сути) в многофункциональную кнопку. Камера активируется только в том случае, если кнопка «дважды нажата».
После долгого уикенда изучения функции millis и отладки кода я успешно запрограммировал распознавание двойного нажатия.
Распознавание двойного нажатия
И когда я привязал его к своим командам для управления дисплеем, у меня собралась довольно крутая небольшая утилита.
Двойное нажатие + команды
Теперь у меня была возможность включать и выключать дисплей, но оставалась одна проблема — что насчёт камеры заднего вида? Мне нужно было, чтобы они с фронтальной камерой работали вместе, словно их так настроили на заводе.
На блок-схеме я изобразил, как я это представляю.

Я быстро понял, что для такой системы нужно в любой момент времени знать состояние трёх переменных:
- Модуль передней камеры: водитель включил или выключил его?
- Дисплей камеры: изображение на дисплее включено или выключено?
- Задний ход: автомобиль в реверсе или нет?
Не имея опыта программирования, это было очень сложно сделать, и я всё свободное время думал о разных подходах.
В конце концов, я добился успеха!
Активный мониторинг
Теперь я смог реализовать операционную логику, которую контролирует реле.
Управление через реле
На протяжении всего процесса я всё больше узнавал об Arduino и заметил, что версия Nano способна делать всё, что нужно, при этом у неё меньший размер и более низкая цена. Она идеально подходит для постоянной установки в автомобиль. Я разработал модель и распечатал на 3D-принтере корпус для размещения компонентов в качестве компактного блока для установки.

3D корпус

В целом, этот опыт меня многому научил и открыл глаза на возможности интеграции непосредственно с шиной CAN. Довольно удивительно, чего можно достичь соединением по двум проводам.
В будущем я планирую написать углублённый учебник о том, как добавить дополнительную функциональность к существующим кнопкам в вашем автомобиле, используя бесплатное программное обеспечение и компоненты.
Назначение и функции кан-шины
Если правильно устанавливать и выполнять подсоединение проводов к интерфейсу, то можно обеспечить следующие опции:
- уменьшение параметра воздействия внешних помех на функционирование основных и дополнительных механизмов и узлов;
- возможность выполнить соединение и настраивать любые электронные приборы, в том числе охранные комплексы;
- простой принцип подключения и функционирования дополнительных электронных устройств и приборов, которые имеются в авто;
- более быстрая процедура передачи информации на определенное оборудование и механизмы авто;
- возможность отправки и получения цифровых данных одновременно, а также анализ информации;
- оперативная настройка и подключение опции дистанционного пуска ДВС.
Подробнее о назначении и общих характеристиках CAN-модуля рассказал канал «Crossover 159».
Устройство и принцип работы
По конструкции данный интерфейс выполнен в виде модуля в пластмассовом корпусе или колодки для подсоединения проводников. Цифровая шина включает в себя несколько кабелей CAN. Подключение этого устройства к бортовой сети осуществляется посредством одного проводника.
Шина работает по принципу отправки данных в закодированном виде. Каждое передающееся сообщение обладает специальным уникальным идентификаторов. Может быть информация: «скорость передвижения авто составляет 50 км/ч», «температура охлаждающей жидкости 90 градусов Цельсия» и т. д. При отправке сообщений все электронные блоки получают данные, проверяющиеся идентификаторами. Если информация имеет отношение к определенному модулю, то она обрабатывается, если нет — то игнорируется.
В зависимости от модели, длина идентификатора интерфейса может быть 11 или 29 бит.
Каждое устройство производит считывание информации, передающейся в шину. Передатчик, обладающий более низким приоритетом, должен отпустить шину, так как доминантный уровень искажает его передачу. Если приоритет передающихся пакетов будет более высоким, то он не трогается. Устройство, которое при отправке сообщений потеряло связь, через определенный временной интервал восстановит ее автоматически.
Работа CAN-шины возможна в нескольких режимах:
- Автономный, фоновый или спящий. При включении данного режима все основные агрегаты и узлы выключены и двигатель не заведен. На шину все равно подается напряжение от бортовой сети. Его значение небольшое, что дает возможность не допустить разряда АКБ.
- Пробуждение или запуск интерфейса. В данном режиме устройство начинает работу, это происходит при включении системы зажигания. Если автомобиль оснащен клавише Старт/Стоп, то CAN-шина начинает работу при ее нажатии. Производится включение функции стабилизации напряжения, в результате чего питание начинает поступать на контроллеры и датчики.
- Включение активного режима приводит к началу процесса обмена информацией между исполнительными механизмами и регуляторами. Величина напряжения в сети возрастает, так как шина может потреблять до 85 мА тока.
- Режим отключения или засыпания. При остановке двигателя автомобиля все агрегаты и механизмы, подключенные по CAN-интерфейсу, выключаются. Питание на них перестает подаваться.
Пользователь Valentin Belyaev подробно рассказал о принципе действия цифрового интерфейса.
Что надо знать при поиске неисправностей систем, где применяется CAN-шина.
Основные неисправности шины можно разделить на два типа: механические и сбои связанные с электронной частью. Если неисправность связана с электроникой, то её можно найти только при наличие соответствующего оборудования или осциллографа. К механическим неисправностям можно отнести обрыв одного или обоих проводов, а так же нагрузочного сопротивления, замыкание на массу или между собой проводов шины. При проверке необходимо проверить сопротивление между проводами витой пары. Дело в том, что все оборудование имеет своё нагрузочного сопротивление, кроме того провода шины между собой так же соединяются нагрузочным сопротивлением. При этом надо учитывать, что шины системы комфорт находятся постоянно под напряжением, и при проверке необходимо снять клемму с аккумулятора. Сопротивление CAN-шины системы управления двигателем составляет примерно 50 – 70 Ом., а шина системы комфорт, информационно-командной систем может сильно отличаться в зависимости от подключённого оборудования и составлять примерно 2 – 4 кОм.
admin16/02/2016
Комментарий
Имя *
Сайт
Этот сайт использует Akismet для борьбы со спамом. Узнайте как обрабатываются ваши данные комментариев.
« Электронная панель приборов
Модуль зажигания »
Метки
Ваз, неисправности ВАЗ Датчики Зажигание Инжектор Приборы Стартер Схемы Электрокары Электроснабжение ваз 2110 газель газель бизнес регистраторы ремонт автомобиля
Свежие записи
- Устройство и принцип работы парктроника
- Многофункциональное устройство Roadgid X7 Gibrid GT
- Неисправность системы зажигания ГАЗ
- Электрический Xiaomi Mi Mijia M365
- Дополнительное оборудование автомобиля (установка)
Архивы
Архивы Выберите месяц Август 2020 Июль 2020 Декабрь 2020 Август 2017 Июль 2020 Июнь 2020 Май 2020 Апрель 2020 Март 2020 Декабрь 2016 Ноябрь 2020 Октябрь 2020 Сентябрь 2020 Август 2020 Июль 2016 Июнь 2020 Май 2020 Апрель 2020 Март 2020 Февраль 2020 Ноябрь 2015 Октябрь 2020 Август 2020 Июль 2020 Июнь 2020 Май 2020 Апрель 2015 Март 2020 Февраль 2020 Январь 2020 Декабрь 2014 Ноябрь 2014 Октябрь 2014 Сентябрь 2014 Август 2014 Июль 2014 Июнь 2014 Май 2014 Апрель 2014 Февраль 2014 Январь 2014 Декабрь 2013 Ноябрь 2013 Октябрь 2013 Август 2013 Июнь 2013 Май 2013 Март 2013 Февраль 2013 Январь 2013 Ноябрь 2012 Октябрь 2012 Сентябрь 2012 Август 2012 Июль 2012 Июнь 2012 Май 2012 Апрель 2012 Март 2012 Февраль 2012 Январь 2012 Декабрь 2011 Ноябрь 2011 Октябрь 2011 Сентябрь 2011 Август 2011 Июль 2011 Июнь 2011 Май 2011 Апрель 2011
Рубрики
- Аккумуляторная батарея
- Видео
- Генератор
- Датчики
- Диагностика
- Зажигание
- Новости
- Оборудование
- Приборы
- Ремонт
- Свечи зажигания
- Стартер
- Схемы
- Устройства
- Электрокары
- Электроснабжение
Мы в соцсетях
Автоэлектрика@ Все права защищены. При копировании материалов сайта необходимо давать ссылку на сайт.
Преимущества и недостатки
Если автомобиль оснащен цифровым интерфейсом, это обеспечивает следующие плюсы:
- Простота монтажа сигнализации на транспортное средство. Наличие CAN-шины в авто позволяет обеспечить более быстрый и упрощенный алгоритм подключения охранной системы.
- Высокая скорость отправки информации между агрегатами и системами, что обеспечивает быстродействие узлов.
- Хорошая устойчивость к воздействию помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить образования ошибок при отправке и приеме информации.
- Цифровой интерфейс, работая в активном режиме, выполняет разброс скорости по различным каналам самостоятельно. Благодаря этому все системы работают максимально оперативно.
- Безопасность CAN-шины. При попытке получения несанкционированного доступа к автомобилю система может произвести блокировку узлов и агрегатов.
Минусы:
- Некоторые системы обладают ограничениями по объему передающейся информации. Если автомобиль сравнительно новый и оборудован разными электронными устройствами, это приводит к росту нагрузки на канал передачи данных. В результате время отклика увеличивается.
- Большинство передающейся информации по цифровому интерфейсу имеет определенное назначение. На полезные данные в системе предусмотрена небольшая часть трафика.
- Возможна проблема отсутствия стандартизации. Это часто происходит при применении протоколов высших уровней.
Разновидности и маркировка
По типу идентификаторов такие устройства делятся на два вида:
- CAN2, 0A. Это маркировка интерфейсов, которые могут работать в 11-битном формате передачи информации. Данная разновидность устройств не в состоянии определять ошибки импульсов от блоков, которые работают с 29 бит.
- CAN2, 0B. Это маркировка шин, работающих в формате 11 бит. Основная особенность заключается в возможности передачи информации на блоки управления при выявлении 29-битного идентификатора.
В зависимости от области применения, шины разделяются на три класса:
- Для двигателя транспортного средства. При подключении шины обеспечивается максимальная скорость передачи данных и связи между управляющими устройствами. Отправка информации осуществляется по дополнительному каналу. Основное назначение состоит в синхронизации работы микропроцессорного модуля с другими системами. К примеру, антиблокировочным узлом колес, трансмиссией и т. д.
- Цифровые интерфейсы класса Комфорт. Этот класс шин предназначен для взаимодействия с любыми устройствами данного типа. Интерфейс используется для работы с системами электронного изменения положения электрозеркал, узла обогрева кресел, управления люком и т. д.
- Информационно-командные устройства. Они характеризуются аналогичной скоростью при отправке данных. Такие шины обычно применяются для связи между системами, которые требуются для обслуживания автомобиля.
Канал «Diyordie» рассказал о назначении цифрового интерфейса, а также о его разновидностях в автомобиле.
Обмен данными посредством шины CAN
Подробности

Применяемая на автомобилях система CAN позволяет установить связь между отдельнымиэлектронными блоками управления. При эксплуатации автомобиля и при диагностикеего агрегатов эта система предоставляет возможность использования новых функций,которые не могут быть возложены на отдельно действующие блоки управления.Общие сведения по теме «Шина данных CAN» были впервые приведены в Программесамообучения 186; в настоящей Программе рассказывается об основных функциях системыCAN в ее современном состоянии.
Для чего служит система шин данных?Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронныеблоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса.Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть,связывающая блоки управления). Применение системы CAN на автомобиле дает следующиепреимущества:
•Обмен данными между блоками управления производится на унифицированной базе.Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.•Независимо действующие системы, например, система курсовой стабилизации ESP, могут бытьреализованы с меньшими затратами.•Упрощается подключение дополнительного оборудования.•Шина данных CAN является открытой системой, к которой могут быть подключены как медныепровода, так и стекловолоконные проводники.•Диагностика электронных блоков управления производится посредством кабеля «К».Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производитсячерез шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). Вданном случае речь идет о так называемом виртуальном кабеле «К». В будущемнеобходимость в кабеле «К» должна отпасть.•Можно проводить одновременную диагностику нескольких блоков управления, входящих всистему.
От центрального блока управления к децентрализованной сети с несколькими блоками управления

Автомобиль с центральным блоком управления

Автомобиль с тремя блоками управления

Автомобиль с тремя блоками управления, объединенными в сеть посредством системы шин данных

К системе CAN параллельно подключены многочисленные компоненты.При проектировании системы учитываются следующие требования:•Обеспечение максимальной надежности: внутренние и наружные помехи должны бытьобязательно распознаны.•Высокая живучесть: при выходе из строя одного из блоков управления система должнапродолжать функционировать, обеспечивая обмен данными между ее работоспособнымикомпонентами.•Высокая плотность потока данных: все блоки управления должны в каждый момент временирасполагать одинаковой информацией и получать одинаковые данные; при повреждении системывсе блоки управления должны получать информацию о ее неисправности.•Высокая скорость передачи данных: обмен данными между подключенными к сети компонентамидолжен производиться возможно быстрей, чтобы обеспечить требования передачи в реальномвремени.
Сигналы передаются шиной CAN в цифровом виде; в настоящее время для их передачи используютсямедные провода. При этом надежно обеспечивается скорость передачи данных до 1000 кбит/с(1 Мбит/с).

- Вперёд >
Подключение сигнализации своими руками
Чтобы подключить охранный комплекс к цифровому интерфейсу, надо знать место установки микропроцессорного модуля управления сигнализаций. Это устройство устанавливается под приборной комбинацией машины. Возможен монтаж блока за вещевым ящиком или аудиосистемой.
Необходимые приборы и инструменты
Предварительно надо подготовить:
- тестер для проверки напряжения — мультиметр;
- нож;
- изоленту;
- отвертку с крестовым наконечником.
Пошаговая инструкция
Установка выполняется так:
- Приступая к задаче, надо убедиться в работоспособности противоугонного комплекса. В случае, когда монтаж системы не был выполнен, надо подключить все устройства к блоку управления, а его — к аккумулятору.
- Производится поиск основного кабеля, который идет на цифровой интерфейс. Этот провод всегда толстый и обычно имеет оранжевую оболочку.
- Микропроцессорный модуль противоугонной системы надо подключить к этому проводнику. Для осуществления задачи применяется колодка цифровой шины.
- Если блок управления охранной системы не был установлен, производится его монтаж. Он должен быть размещен в скрытом месте, не подверженном воздействию влаги. При монтаже модуль надежно фиксируется с помощью пластиковых стяжек или саморезов.
- Все места соединения проводов надо заизолировать с применением термоусадочных трубок либо изоленты. После подключения производится диагностика выполненных действий. Если возникли проблемы, надо воспользоваться мультиметром для поиска поврежденного участка.
- На последнем этапе необходимо произвести проверку и настройку всех каналов передачи данных. Если имеются дополнительные каналы, они также настраиваются.
Канал «Гаражный любитель» подробно рассказал об установке и подключении противоугонного комплекса Старлайн с CAN-шиной.
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
Подробнее о командах, которые указываются после CanRegime:
- Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
- BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса. Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
- TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.
CAN-шина немного теории и практика

Уже сегодня CAN интерфейс уверенно вытесняет UART-производные интерфейсы (rs485, rs232) как более функциональная шина с большей производительностью, и на это есть причины. Но до сих пор не так много разработчиков знает как и с чем «есть» этот интерфейс. Попытаемся рассмотреть немного примеров и поделиться собственным опытом использования этого интерфейса, а также общую теорию, примеры применения и практические рекомендации по использованию.
Что же такое CAN-bus, в общих словах это подобный ethernet интерфейс, описывающий логику работы шины, при этом не привязан ни к какому физическому уровню, ну и конечно ни к какому протоколу. Интерфейс очень продуман, он исключает коллизии, ошибки на линии и гарантирует доставку, при этом в нем нет архитектуры master-slave, тут каждое устройство просто «выкидывает» на линию данные и все устройства могут просматривать полученные данные, как-будто все master’ы. Скорость на кан-шине — до 1 Мбит. Да да, такое даже и не снилось rs485, на смену которого пришел CAN.
При таких плюсах есть и свои недостатки. Устройств с интерфейсом UART очень много, а вот с поддержкой CAN bus очень мало. В то же время тормозящим фактором для новой шины является сама сложность программной реализации низкого уровня (драйвера), не каждый программист готов взяться за освоение новой тематики. UART конечно есть везде и даже на самом простом процессоре, это один из самых старых интерфейсов, соответственно даже самый ленивый программист хоть раз сталкивался с таким интерфейсом.
Если же процессор не имеет на борту CAN-контроллера, это не так страшно. Многие используют микросхемы типа mcp2510, это контроллер, подключаемый по SPI. Его используют многие производители электроники, embedded linux имеет даже поддержку этого чипа в некоторых BSP, так что подключить кан-контроллер к устройство с маленьким линуксом может не составить труда.
Теперь немного о физической реализации. Есть стереотип, что CAN связан с физической реализацией. Это не так. Но тем не менее чаще всего используется витая пара для передачи сигнала, уровень сигнала в витой паре чуть больше 3 вольт. Сигнал хорошо видно на осциллографе, при правильном подключении это набор прямоугольных импульсов. Есть так же оптическая реализация физической линии, по сути сигналы в ней ничем не отличаются.
Если мы говорим про реализацию витой парой, то стоит знать еще несколько вещей. На концах шины стоят развязывающие сопротивления, их значения 120 Ом. Практика показывает, что возможно использование и резисторов номиналом около 500 Ом. Применение этих резисторов связано с распространением сигнальных волн высокой частоты. Также есть мнение, что стоит использовать кабель не менее 1 метра для связи двух устройств, хотя все конечно зависит от навыков схемтохника и понимания того, что происходит на шине.
Режимы работы
Существует несколько режимов функционирования терминала:
- FMS — в нем автовладелец может узнать общий расход горючего, обороты, пробег транспортного средства, нагрузку на оси, температуру силового агрегата. Допускается получение данные об объеме горючего в баке. Для работы в данном режиме выполняется вход в меню выбора типа фильтров программы «Конфигуратор». Указывается тип режима FMS, скорость цифрового интерфейса, после чего нажимается кнопка «Применить».
- Режим прослушки используется для получения сообщений, передающий через цифровой интерфейс. Чтобы работать с ним, надо зайти в программе в настройки шины CAN и выбрать один из рабочих параметров. Это может быть скорость интерфейса или время ожидания, тип фильтра в данном случае не играет роли. После указания параметров «кликается» клавиша «Прослушать».
- Для привязки информации, полученной посредством прослушивания цифрового интерфейса, используются пользовательские фильтры. После прослушки данных надо выбрать тип фильтрующей технологии (для 11 или 29 бит). Расшифровка данных производится в соответствии с технической документацией.
- Режим тестирования OBD2 используется для сканирования скорости отправки информации, а также класса идентификатора. Чтобы запустить эту функцию, автовладельцу надо подключиться напрямую к цифровому интерфейсу или диагностическому разъему. Включение режима осуществляется посредством входа в меню «Настройка» и выбора опции «Тест OBD2». В результате терминалом начнется отправка запросов с конкретными идентификаторами на различных скоростях интерфейса. Во вкладке «Устройство» можно ознакомиться с извлеченной и расшифрованной информацией.
Аналоговые входы
Для того, чтобы лучше понять принцип программирования контроллеров CANNY в среде разработке CannyLab, давайте ещё разберём пример работы с аналоговым входом в этой системе.
Мы будем отслеживать уровень напряжения на 10 пине контроллера и если он находится в диапазоне 2,5 В ± 20%, будем зажигать встроенный в плату светодиод.
Как и в предыдущем примере, конфигурируем 4-й пин как выход для того, чтобы иметь возможность управлять работой светодиода.
Включаем АЦП на 10-м канале.
Далее пользуемся двумя логическими блоками, которые выдают 1 на выход, если напряжение находится в заданном диапазоне. Полный диапазон от 0 до 4095.

Блок «Логическое И» довершает работу и со своего выхода управляет работой светодиода на плате.
Вот и всё. То, что мы привычно делали на Arduino, мы легко сделали в CannyLab. Осталось только освоиться в этой среде программирования и вы сможете легко и непринуждённо создавать свои проекты на этой платформе.
Эти простые примеры составления программ даны для того, чтобы вы могли понять принцип визуального программирования микроконтроллеров CANNY. В дальнейшей работе вам поможет отличная справочная документация и поддержка разработчиков на сайте и форуме системы.
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.
Общая схема для сборки анализаторного устройства
Плата, использующаяся в качестве основы
Практические примеры
Давайте на простых примерах разберём, как в CannyLab выполнять действия, привычные нам в Arduino IDE. Начнём с традиционного мигания светодиодом.
В контроллере CANNY 5 на выводе С4 (Channel 4) присутствует тестовый светодиод (аналог светодиода, находящегося на 13 выводе в Arduino). И его тоже можно использовать для индикации и экспериментов, чем мы и воспользуемся.
Что же нужно, чтобы помигать светодиодом в контроллере CANNY? Нужно сделать всего две вещи — сконфигурировать пин четвертого канала как выход и подать на этот выход сигнал с ШИМ генератора. Все эти действия мы уже не раз проделывали в Arduino IDE, посмотрим как это выглядит в CannyLab.
Итак, конфигурируем пин четвертого канала как выход
Настраиваем генератор ШИМ. Задаём период 500 миллисекунд, заполнение — 250 миллисекунд (то есть 50 %) и 1 (true) на входе генератора «Старт» и… всё! Больше ничего делать не нужно — программа готова, осталось только залить её в контроллер.
