CAN Технологии
Применяемая на автомобилях система CAN (Controller_Area_Network) позволяет установить связь между отдельными электронными блоками управления. При эксплуатации автомобиля и при диагностике его агрегатов эта система предоставляет возможность использования новых функций, которые не могут быть возложены на отдельно действующие блоки управления.
Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронные блоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса. Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть, связывающая блоки управления). Применение системы CAN на автомобиле дает следующие преимущества:
Обмен данными между блоками управления производится на унифицированной базе. Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.
Независимо действующие системы, например, система курсовой стабилизации ESP, могут быть реализованы с меньшими затратами.
Упрощается подключение дополнительного оборудования.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
Диагностика электронных блоков управления производится посредством кабеля «К».
Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производится через шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). В данном случае речь идет о так называемом виртуальном кабеле «К». В будущем необходимость в кабеле «К» должна отпасть.
Можно проводить одновременную диагностику нескольких блоков управления, входящих в систему.
CAN
Промышленная сеть CAN (Controller Area Network) была создана в конце 80-х годов фирмой Bosch как решение для распределенных систем, работающих в режиме реального времени. Первая реализация CAN применялась в автомобильной электронике, однако сейчас CAN находит применение практически в любых типах машин и промышленных установок, от простейших бытовых приборов до систем управления ускорителями элементарных частиц. В настоящий момент CAN-протокол стандартизован в международном стандарте ISO 11898.
Основные положения стандарта CAN.
В качестве среды передачи в CAN используется дифференциальная линия связи — витая пара, сигналы по которой передаются в дифференциальном режиме.
Для контроля доступа к среде передачи используется метод недеструктивного арбитража.
Данные передаются короткими (максимальная длина поля данных — 8 байт) пакетами, которые защищены контрольной суммой.
В CAN отсутствует явная адресация сообщений. Вместо этого каждый пакет снабжен полем арбитража (идентификатор+RTR-бит), которое задает приоритет сообщения в сети.
CAN имеет исчерпывающую схему контроля ошибок, которая гарантирует повторную передачу пакета, в случае возникновения ошибок передачи/приема сообщения.
В CAN существует способ автоматического устранения узла, являющегося источником ошибочных пакетов в сети.
CAN контроллеры.
Протокол CAN полностью реализован аппаратно — в виде микросхем- CAN контроллеров или в виде стандартного периферийного устройства в составе микросхемы- микроконтроллера. Все производители современных микроконтроллеров по крайней мере в одном из семейств имеют микроконтроллеры со встроенным периферийным одним или несколькими CAN-контроллерами. Таким образом, сегодня, СAN-контроллер является таким же стандартным периферийным устройством как контроллер SPI, I2C или UART.
Что такое CAN-шина
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Как это исполнено физически
Физически CAN-шина – система из специального кабеля с разветвителями для подключения электронных блоков и конечных устройств-терминаторов (резисторов).
Пример шины CAN
Витая пара
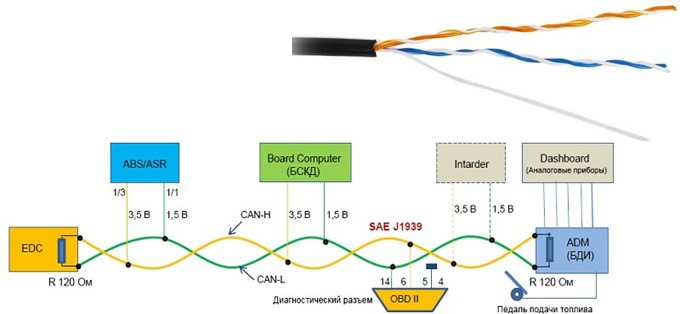
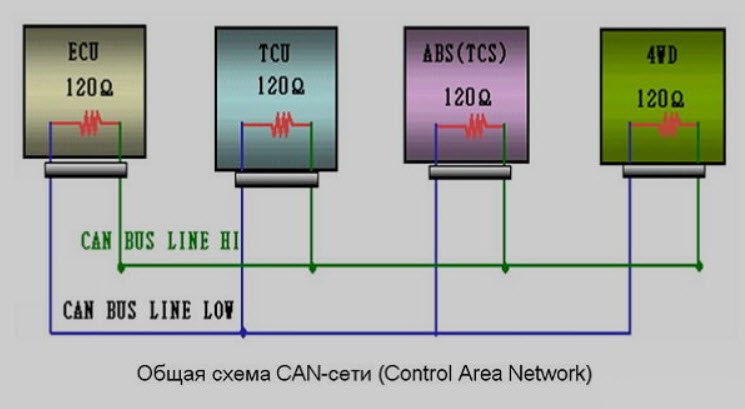
Чаще всего шина CAN – скрученные (витые) пары проводов (по 30 витков на один погонный метр) с разветвителями для подключения ЭБУ (ECU) и конечными резисторами-терминаторами с номинальным сопротивлением 120 Ом на концах шины.
Сколько CAN-шин может быть на ТС
На ТС экологического уровня Евро-3 и выше может быть от 1 до 6 и более шин CAN, которые могут обозначаться как M-CAN, T-CAN, I-CAN, H-CAN, A-CAN, EBS-CAN и т.д.
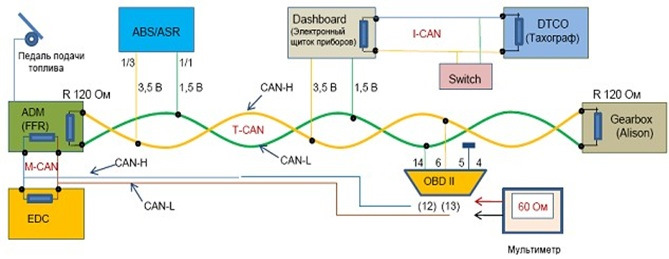
Топология CAN шины
Как найти CAN-шину
Признаками шины М-CAN и Т-CAN могут быть, например:
• наличие диагностического разъема OBD II;
• цвет и сечение проводов витых пар;
• связь витых пар с контактами в разъемах OBD II и ЭБУ.
Признаки шины M-CAN и T—CAN

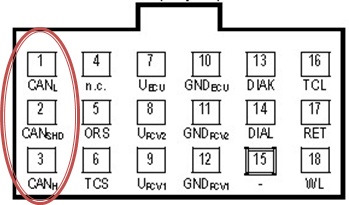
Достаточно просто найти CAN на разъеме системы ABS/ASR
Диагностический разъём OBD II и его распиновка
На большинстве ТС после 2003 года используется диагностический разъем OBD II или DLC (Diagnostic Link Connector), который находится под панелью приборов.
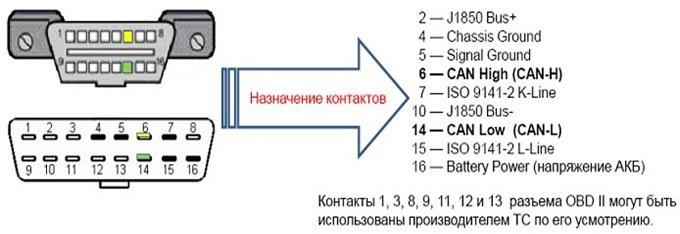
Распиновка OBD
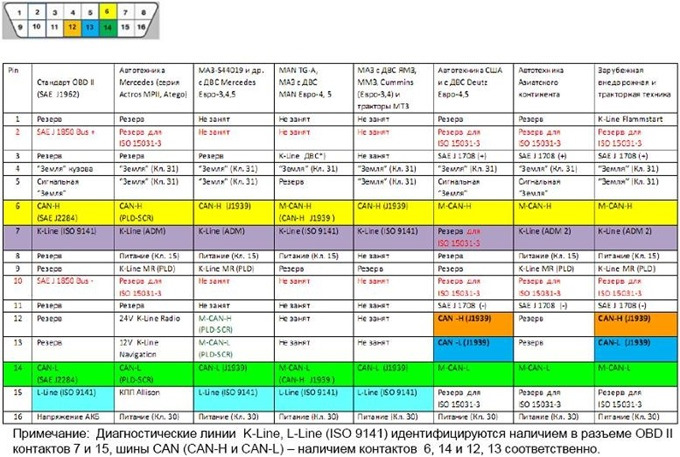
Сводная таблица распиновки OBDII для разных марок автомобилей
Как будем искать CAN-шину
С помощью мультиметра можно проверить любую витую пару проводов, чтобы убедиться в следующем:
1. Является ли проверяемая витая пара вообще CAN-шиной? (Проверка импеданса);
2. Если витая пара является CAN-шиной, то передаются ли в ней какие–либо сообщения? Проверка работоспособности);
3. Находится ли CAN-шина в работоспособном состоянии и какая из линий шины является CAN-L, а какая – CAN-H?
Внимание! Неосторожное обращение с включенной
CAN-шиной может привести к фиксации в ней ошибок!
Проверка импеданса
Проверка импеданса (полного сопротивления)
Проверка импеданса
ВНИМАНИЕ!
Проверка должна производиться при полностью выключенном питании бортовой сети (выключенной массе).
Контрольное значение должно быть в пределах 60 Ом.
Проверка работоспособности CAN-шины
Находится ли CAN-шина в рабочем состоянии?
ВНИМАНИЕ! Проверка производится при включенном замке зажигания, работающем двигателе, нажатии и отпускании педали подачи топлива между проводами витой пары.
Контрольное значение напряжения должно быть в пределах 1,2-3,0 В.
Определение CAN-H и CAN-L
Какой из проводов является CAN-H, а какой CAN-L?
ВНИМАНИЕ! Проверка производится в состоянии рецессии (при включенном главном выключателе АКБ (кнопке массы), замок зажигания выключен!) и в доминантном состоянии (при включенном замке зажигания в положение «Приборы», при работающем и не работающем двигателе).
Проверка с помощью осциллографа
Учитывая возможные отклонения уровня напряжения от номинальных значений, состояние рецессии можно определить только с помощью осциллографа.
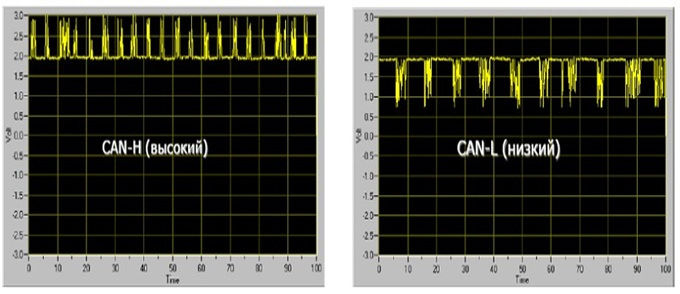
Проверка осцилографом
Цвет оболочки и цветовая маркировка проводов

Цвет оболочки и маркировка проводов
CAN-шина. Что можно увидеть?
В зависимости от того, какую информацию заложил в CAN-шину производитель, могут распознавать:
Способы подключения:
Контактный способ:
Достоинства:
• просто и дешево;
• можно работать на считывание и передачу.
Недостатки:
• может оказывать мешающее влияние на CAN-шину; проблемы с возникновением и фиксацией ошибок;
• Проблемы с гарантией на ТС.
Безконтактный способ (CANCrocodile):

Can- Крокодил
Достоинства:
• не оказывает мешающего воздействия на CAN-шину.
Недостатки:
• можно работать только на считывание.
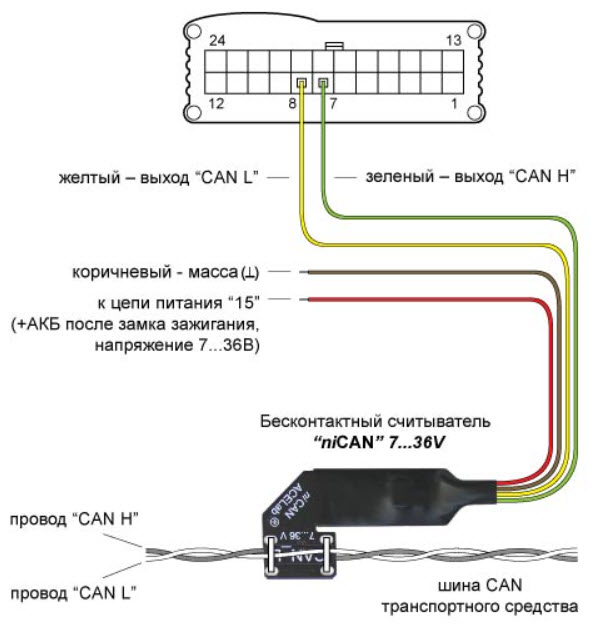
Бесконтактныe считыватели Crocodile
CAN Crocodile – устройство для бесконтактного считывания данных с CAN-шины автомобиля. CAN Crocodile применяется для подключения к шине CAN систем GPS/ГЛОНАСС мониторинга, которые получают информацию о режимах работы двигателя, состоянии датчиков, уровне топлива, наличии неисправностей и т.д. CAN Crocodile не нарушает изоляцию проводов CAN и «слушает» обмен по шине с помощью специального беспроводного приемника. Применение CAN Crocodile абсолютно безопасно для автомобиля (!), незаметно для работы бортового компьютера, диагностического сканера и других электронных систем. Особенно актуально применение CAN Crocodile для гарантийных автомобилей, в которых подключение каких-либо электронных устройств к шине CAN часто служит поводом для снятия с гарантии.

Схема подключения Сан-Крокодила в GPS-треккере
Бесконтактным способом – без нарушения изоляционной оболочки проводов и электрического контакта.
Не нарушает изоляцию;
Не влияет на работу CAN-шины;
Не занимает диагностический разъём
Программное обеспечение CAN
Семейство протоколов CAN
Устройства с CAN интерфейсом
В статье использованы материалы:
techclub.by/?p=146
can.marathon.ru/

Ох эти три буквы… Спокойно, всё пристойно, я про CAN.

CAN шина, что же это такое? Много информации читал, но нихрена не понимал. А тут вот нашлось простое и доходчивое объяснение, которое поймёт и ребёнок. А может и не поймет…
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN


Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN

Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN


Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:

Вот такие пироги. Наткнулся тут : quantexlab
Источник
CAN-технология BOSCH в диагностике автомобилей

CAN Технологии
Применяемая на автомобилях система CAN (Controller_Area_Network) позволяет установить связь между отдельными электронными блоками управления. При эксплуатации автомобиля и при диагностике его агрегатов эта система предоставляет возможность использования новых функций, которые не могут быть возложены на отдельно действующие блоки управления.
Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронные блоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса. Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть, связывающая блоки управления). Применение системы CAN на автомобиле дает следующие преимущества:
Обмен данными между блоками управления производится на унифицированной базе. Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.
Независимо действующие системы, например, система курсовой стабилизации ESP, могут быть реализованы с меньшими затратами.
Упрощается подключение дополнительного оборудования.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
Диагностика электронных блоков управления производится посредством кабеля «К».
Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производится через шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). В данном случае речь идет о так называемом виртуальном кабеле «К». В будущем необходимость в кабеле «К» должна отпасть.
Можно проводить одновременную диагностику нескольких блоков управления, входящих в систему.
CAN
Промышленная сеть CAN (Controller Area Network) была создана в конце 80-х годов фирмой Bosch как решение для распределенных систем, работающих в режиме реального времени. Первая реализация CAN применялась в автомобильной электронике, однако сейчас CAN находит применение практически в любых типах машин и промышленных установок, от простейших бытовых приборов до систем управления ускорителями элементарных частиц. В настоящий момент CAN-протокол стандартизован в международном стандарте ISO 11898.
Основные положения стандарта CAN.
В качестве среды передачи в CAN используется дифференциальная линия связи — витая пара, сигналы по которой передаются в дифференциальном режиме.
Для контроля доступа к среде передачи используется метод недеструктивного арбитража.
Данные передаются короткими (максимальная длина поля данных — 8 байт) пакетами, которые защищены контрольной суммой.
В CAN отсутствует явная адресация сообщений. Вместо этого каждый пакет снабжен полем арбитража (идентификатор+RTR-бит), которое задает приоритет сообщения в сети.
CAN имеет исчерпывающую схему контроля ошибок, которая гарантирует повторную передачу пакета, в случае возникновения ошибок передачи/приема сообщения.
В CAN существует способ автоматического устранения узла, являющегося источником ошибочных пакетов в сети.
CAN контроллеры.
Протокол CAN полностью реализован аппаратно — в виде микросхем- CAN контроллеров или в виде стандартного периферийного устройства в составе микросхемы- микроконтроллера. Все производители современных микроконтроллеров по крайней мере в одном из семейств имеют микроконтроллеры со встроенным периферийным одним или несколькими CAN-контроллерами. Таким образом, сегодня, СAN-контроллер является таким же стандартным периферийным устройством как контроллер SPI, I2C или UART.
Что такое CAN-шина
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Как это исполнено физически
Физически CAN-шина – система из специального кабеля с разветвителями для подключения электронных блоков и конечных устройств-терминаторов (резисторов).
Витая пара
Чаще всего шина CAN – скрученные (витые) пары проводов (по 30 витков на один погонный метр) с разветвителями для подключения ЭБУ (ECU) и конечными резисторами-терминаторами с номинальным сопротивлением 120 Ом на концах шины.
Сколько CAN-шин может быть на ТС
На ТС экологического уровня Евро-3 и выше может быть от 1 до 6 и более шин CAN, которые могут обозначаться как M-CAN, T-CAN, I-CAN, H-CAN, A-CAN, EBS-CAN и т.д.
Как найти CAN-шину
Признаками шины М-CAN и Т-CAN могут быть, например:
• наличие диагностического разъема OBD II;
• цвет и сечение проводов витых пар;
• связь витых пар с контактами в разъемах OBD II и ЭБУ.
Диагностический разъём OBD II и его распиновка
На большинстве ТС после 2003 года используется диагностический разъем OBD II или DLC (Diagnostic Link Connector), который находится под панелью приборов.
Как будем искать CAN-шину
С помощью мультиметра можно проверить любую витую пару проводов, чтобы убедиться в следующем:
1. Является ли проверяемая витая пара вообще CAN-шиной? (Проверка импеданса);
2. Если витая пара является CAN-шиной, то передаются ли в ней какие–либо сообщения? Проверка работоспособности);
3. Находится ли CAN-шина в работоспособном состоянии и какая из линий шины является CAN-L, а какая – CAN-H?
Внимание! Неосторожное обращение с включенной
CAN-шиной может привести к фиксации в ней ошибок!
Проверка импеданса
Проверка импеданса (полного сопротивления)
ВНИМАНИЕ!
Проверка должна производиться при полностью выключенном питании бортовой сети (выключенной массе).
Контрольное значение должно быть в пределах 60 Ом.
Проверка работоспособности CAN-шины
Находится ли CAN-шина в рабочем состоянии?
ВНИМАНИЕ! Проверка производится при включенном замке зажигания, работающем двигателе, нажатии и отпускании педали подачи топлива между проводами витой пары.
Контрольное значение напряжения должно быть в пределах 1,2-3,0 В.
Определение CAN-H и CAN-L
Какой из проводов является CAN-H, а какой CAN-L?
ВНИМАНИЕ! Проверка производится в состоянии рецессии (при включенном главном выключателе АКБ (кнопке массы), замок зажигания выключен!) и в доминантном состоянии (при включенном замке зажигания в положение «Приборы», при работающем и не работающем двигателе).
Проверка с помощью осциллографа
Учитывая возможные отклонения уровня напряжения от номинальных значений, состояние рецессии можно определить только с помощью осциллографа.
Цвет оболочки и цветовая маркировка проводов
CAN-шина. Что можно увидеть?
В зависимости от того, какую информацию заложил в CAN-шину производитель, могут распознавать:
Способы подключения:
Контактный способ:
Достоинства:
• просто и дешево;
• можно работать на считывание и передачу.
Недостатки:
• может оказывать мешающее влияние на CAN-шину; проблемы с возникновением и фиксацией ошибок;
• Проблемы с гарантией на ТС.
Безконтактный способ (CANCrocodile):
Достоинства:
• не оказывает мешающего воздействия на CAN-шину.
Недостатки:
• можно работать только на считывание.
Бесконтактныe считыватели Crocodile
CAN Crocodile – устройство для бесконтактного считывания данных с CAN-шины автомобиля. CAN Crocodile применяется для подключения к шине CAN систем GPS/ГЛОНАСС мониторинга, которые получают информацию о режимах работы двигателя, состоянии датчиков, уровне топлива, наличии неисправностей и т.д. CAN Crocodile не нарушает изоляцию проводов CAN и «слушает» обмен по шине с помощью специального беспроводного приемника. Применение CAN Crocodile абсолютно безопасно для автомобиля (!), незаметно для работы бортового компьютера, диагностического сканера и других электронных систем. Особенно актуально применение CAN Crocodile для гарантийных автомобилей, в которых подключение каких-либо электронных устройств к шине CAN часто служит поводом для снятия с гарантии.
Бесконтактным способом – без нарушения изоляционной оболочки проводов и электрического контакта.
Не нарушает изоляцию;
Не влияет на работу CAN-шины;
Не занимает диагностический разъём
Источник
Еще раз о диагностике CAN-шины
 В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

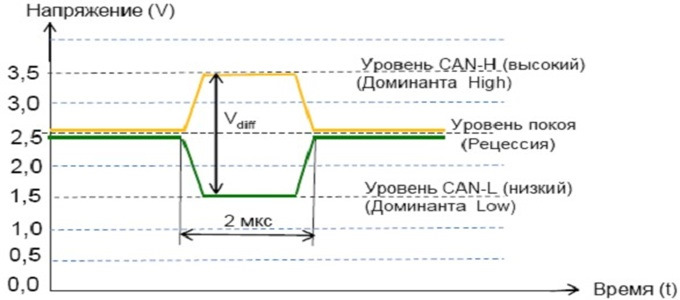
На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:

Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.


На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:

Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :



Давайте обмерим ее с помощью линеек.
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.

Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:

Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :

Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:

Источник
Принцип работы и диагностика CAN-шины в автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.

Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
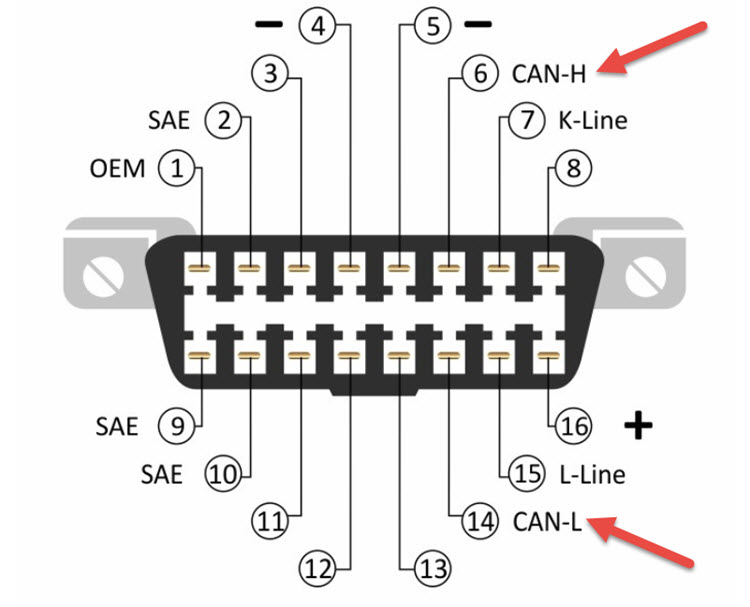
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).

Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:

Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:

Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.

«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.

Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.

Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.

Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Источник
Автомобили давно уже стали не просто компьютерами на колёсах, а скорее компьютерными сетями. Передача механических, гидравлических или пневматических усилий между узлами и механизмами со временем превратилась в обмен электрическими сигналами, а сейчас и в информационное взаимодействие.
Содержание статьи:
- 1 Зачем нужна в машине CAN-шина
- 2 Схема и место расположения КАН-интерфейса
- 3 Принцип работы
- 4 Виды CAN-шин
- 5 Как подключиться и сделать диагностику автомобиля
- 6 Неисправности
- 7 Плюсы и минусы встроенных шин

Наряду с массовым внедрением дешёвых электронных комплектующих, потребовалось разработать достаточно сложное и надёжное сетевое физическое и программное обеспечение.
Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
По теме: Как работает автопилот в современных автомобилях
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Схема и место расположения КАН-интерфейса
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.

Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Это интересно: Почему появляется вибрация в салоне автомобиля
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Виды CAN-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
- пропадание питания отдельных устройств;
- повреждения проводки и разъёмов;
- отказ контроллеров.
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
- имеется автоматический контроль проходящей информации на ошибки;
- дифференциальная передача сигналов и использование витой пары даёт хорошую скорость и защиту от помех;
- стандартизация протоколов упрощает диагностику и поиск неисправностей;
- построение системы приоритетов упрощает проектирование;
- все устройства функционально закончены и универсальны.
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.
Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
![]() Загрузка…
Загрузка…
На чтение 21 мин Просмотров 20.9к. Опубликовано 20.10.2022
Обновлено 20.10.2022
Из этой статьи вы узнаете, что такое CAN-шина, почему она появилась. Разберемся с блоками управления в автомобиле и с тем, как они общаются между собой. Расскажем, какие контроллеры соединяются быстрой CAN-шиной, а какие — медленной.
Узнаете, как устроена CAN-шина на физическом и цифровом уровне, из каких данных состоит сообщение, как происходит арбитраж трафика. Какая максимальная длина кабеля и скорость передачи информации, как реализована защита от помех.

Если интересует какой-то конкретный вопрос, пользуйтесь оглавлением.
Что такое CAN-шина?
Автомобиль подобен человеческому организму. Сеть контроллеров (шина CAN) это как нервная система у человека.
В свою очередь, «узлы» или «электронные блоки управления» (ЭБУ) подобны частям тела. Они соединены между собой через CAN-шину.

Шина CAN представляет собой витую пару проводов. С ее помощью все блоки управления в автомобиле соединены в единую информационную сеть.
Причины появления CAN-шины
Когда вы нажимаете выключатель в своем доме, чтобы включить свет, электричество проходит через выключатель к лампам.
Автомобили раньше использовали такое же подключение. С тех пор как в 1915 году Генри Форду пришла идея добавить в свои автомобили фары и электрический сигнал, электричество поступало от аккумулятора через выключатели к фарам и другим устройствам.
К 1960-м годам в каждом автомобиле были тысячи тяжелых проводов.

После нефтяного эмбарго 1970-х годов на автопроизводителей оказывалось все большее давление с целью повышения эффективности использования топлива. Поэтому они начали искать способы уменьшить вес выпускаемых автомобилей.
К началу 1980-х годов в автомобилях было все больше и больше электронных блоков управления. Сначала электронное управление получили самые важные системы, такие как системы управления двигателем, трансмиссией и тормозной системой. Но со временем электронное управление распространилось и на второстепенные либо периферийные системы, такие как климат-контроль, блоки комфорта и прочие.
В скором времени такое положение дел привело к тому, что производители столкнулись тремя проблемами:
Такие компании, как Bosch, искали тип шинной коммуникационной системы, которая могла бы использоваться в качестве системы связи между несколькими ЭБУ и системами автомобиля.
Они искали на рынке, но не могли найти именно то, что было нужно, поэтому они начали разработку «Controller Area Network» в партнерстве с Mercedes-Benz, Intel, а также несколькими университетами Германии.
Краткая история шины CAN
В 1986 году компания Bosch представила стандарт CAN на конгрессе SAE в Детройте. Год спустя корпорация Intel начала поставки первых микросхем контроллеров CAN, и автомобильный мир изменился навсегда.
- До CAN: автомобильные ЭБУ использовали сложную проводку «точка-точка».
- 1986: Компания Bosch разработала протокол CAN.
- 1991: Bosch опубликовала CAN 2.0 (CAN 2.0A: 11 бит, 2.0B: 29 бит).
- 1993: CAN принят в качестве международного стандарта (ISO 11898).
- 2003: ISO 11898 становится серией стандартов.
- 2012: Bosch выпустила CAN FD 1.0 (передачи данных на двух скоростях).
- 2015: Протокол CAN FD стандартизирован (ISO 11898-1).
- 2016: Физический уровень CAN для скоростей передачи данных до 5 Мбит/с стандартизирован в ISO 11898-2.
Теперь, например, достаточно одного датчика температуры, который подключен к блоку управления двигателем. ЭБУ опрашивает датчик температуры для себя и отправляет эту информацию в виде сообщения в информационную шину данных для других блоков.

При таком подходе уменьшается количество проводов, нет дублирования датчиков. Появляется возможность ввода/вывода информации из электронных блоков управления, что позволяет диагностировать сложные системы с множеством электронных блоков управления.
Сегодня CAN является стандартом в автомобилях (легковых, грузовых, автобусах, тракторах, …), кораблях, самолетах, электромобилях и многом другом.
Что такое ЭБУ?
В автомобиле ЭБУ могут быть, например, блок управления двигателем, подушками безопасности, аудиосистемой и т. д.
В современном автомобиле может быть до 70 ЭБУ — и каждый из них может иметь информацию, которой необходимо поделиться с другими участниками сети.

Именно здесь на помощь приходит CAN-шина. Она позволяет каждому блоку управления общаться со всеми другими ЭБУ без сложной специальной проводки.
В частности, блок управления может передавать данные с датчиков по шине CAN. Переданные данные принимаются всеми другими контроллерами в сети CAN, после чего каждый ЭБУ может проверить данные и решить, принимать их или игнорировать.
Физический уровень шины CAN
Физический уровень CAN описан в стандарте ISO 11898 и регламентирует способ передачи данных. В случае с CAN-шиной это два провода витой пары. При этом CAN-шина вполне может работать и по одному проводу, а витая пара прежде всего используется для защиты от помех.
Однопроводная схема
Для того чтобы лучше понять как данные передаются по двухпроводной CAN-шине, давайте сначала рассмотрим как данные передаются по однопроводной схеме, которой, например, является K-линия.
Итак, есть один провод, с его помощью соединены блоки управления. Этот провод внутри блока соединен с 12 вольтами через резистор 5 килоом. Таким образом напряжение на проводе становится по умолчанию 12 В.

Каждый из подключенных блоков может стягивать это напряжение на массу, меняя его с 12 на 0 вольт. Таким образом, получаются прямоугольные импульсы на шине данных. Они могут принимать всего два уровня напряжения — 0 и 12 вольт.
Присвоим низкому уровню в ноль вольт логический ноль, а уровню 12 вольт — логическую единицу. Зададим тактовый сигнал шины, то есть обозначим сколько раз секунду блоки будут опрашивать шину и соответственно сколько времени будет длиться один бит.

То есть наименьшая часть цифровой информации вид может принимать только два значения 0 или 1. Таким образом, мы получили физическую возможность отправлять и принимать двоичные данные между блоками управления.
Витая пара. Как работает CAN high-speed
В CAN-шине тот же принцип, только сигнал считывается как разница между напряжениями проводов CAN-high и CAN-low, которые образуют витую пару.


Чтобы понять, как именно это происходит, давайте рассмотрим как могут меняться уровни напряжения на этих проводах.
По умолчанию на проводе CAN-high, как и на проводе CAN-low, напряжение соответствует величине в 2,5 В. При этом разница напряжений между проводами составляет 0 В. Такое состояние can-шины называется рецессивным (recessive) и интерпретируется как логическая единица.
Существует и второе состояние шины, при котором напряжение на проводе CAN-high будет 3,5 вольт, а на проводе CAN-low — 1,5 В. Разница напряжений между проводами составит 2 вольта. Это состояние называется доминантным (dominant) и соответствует логическому нулю.

Логическая 1 (рецессивное состояние):
- 2,5 вольта на проводе CAN_H;
- 2,5 вольта на проводе CAN_L;
- дифференциальное напряжение 0 вольт.
Логический 0 (доминантное состояние):
- 3,5 вольта на проводе CAN_H;
- 1,5 вольта на проводе CAN_L;
- дифференциальное напряжение 2 вольта.
Так работает высокоскоростная шина CAN high speed. Она описана в стандарте ISO 11898-2.
Работа CAN low speed
Устройство низкоскоростной шины CAN low speed описано в стандарте ISO 11898-3. Для нее уровни напряжения такие.

Логическая 1 (рецессивное состояние):
- 0 вольт на проводе CAN_H;
- 5 вольт на проводе CAN_L;
- дифференциальное напряжение 5 вольт.
Логический 0 (доминантное состояние):
- 3,6 вольта на проводе CAN_H;
- 1,4 вольта на проводе CAN_L;
- дифференциальное напряжение 2,2 вольта.
Защита от помех
Ведь и на одном проводе все работало, так зачем усложнять?
CAN-шиной объединены самые ответственные блоки управления автомобиля. От качества этой связи напрямую зависит безопасность движения. В связи с этим CAN-шине предъявляются высокие требования к надежности и безотказности.
Дело в том, что многие компоненты автомобиля являются источниками электромагнитных помех. Особенно система зажигания.
Использование витой пары позволяет в значительной степени решить эту проблему. Давайте посмотрим, как это происходит.

Представьте себе, что витая пара CAN-шины попадает в зону действия электромагнитной помехи. В медном проводе индуцируется напряжение, которое плюсуется или отнимается от напряжения, уже существующего на этом проводе.

Предположим, что на проводе CAN-high в рецессивном состоянии напряжение было 2,5 В. Помеха увеличила его на 1,1 В. Соответственно мы получили напряжение в 3,6 В, которое могло быть интерпретировано уже как доминантное состояние.
Но CAN-шина устойчива к таким помехам, потому что сигналом является не просто изменение уровня напряжения на одном из проводов, а именно изменение разницы между напряжениями на этих проводах. А разница как раз не изменилась из-за применения витой пары.

Таким образом, на проводе CAN_L напряжение поднимется на те же 1,1 В. А разница напряжений как была 2,5 — 2,5 = 0 В, так и осталась 3,6 — 3,6 = 0 В. Действие помехи на шину в доминантном состоянии аналогично.
Зачем нужен трансивер
Название Transceiver произошло от двух слов receiver (приемник) и transmitter (передатчик). Переводится как приемопередатчик.
Трансиверы обрабатывают дифференциальный сигнал, принимают и передают информацию. Трансивер связывает провода витой пары (CAN_H и CAN_L) с линиями Tx и Rx микропроцессора, который не умеет напрямую работать с CAN-шиной.
По линии Tx микропроцессор отправляет информацию в шину данных, а по линии Rx он считывает информацию.

В трансивере находится схемотехника, которая формирует разные уровни напряжения на проводах CAN_H и CAN_L для доминантного и рецессивного состояния шины.
Трансивер обычно устанавливается внутри электронного блока управления и представляет собой специализированную микросхему.
Оконечные сопротивления
Это еще одна часть физического уровня CAN-шины. Оконечные сопротивления используются для борьбы с отраженным сигналом так называемым эхом.

Отраженный сигнал препятствует нормальной передаче данных. Причем, чем больше будет длина проводов шины и чем выше будет скорость передачи данных, тем значительней будет проявляться этот негативный эффект.
Правильно подобранные конечные нагрузочные сопротивления компенсируют отраженный сигнал. Обычно это два резистора по 120 ом внутри блока управления. Они подключены к противоположным концам шины. Таким образом, сопротивление между проводами can-шины составляет около 60 ом.
У разных автопроизводителей величина оконечных сопротивлений может отличаться.
Где применяется CAN high speed, а где CAN low speed
HS-CAN и LS-CAN отличаются скоростью передачи данных и уровнями рабочих напряжений. Быстрый CAN применяется для связи блоков управления двигателя, автоматической коробки передач, тормозов, рулевого управления, подушек безопасности, полного привода, пневмоподвески и других важных систем, от которых напрямую зависит безопасность движения.

Медленный CAN используется для менее важных систем, таких как климат-контроль, системы комфорта, наружное освещение, электропривод сидений и т. п. в зависимости от комплектации автомобиля.

Особенностью медленного CAN является возможность сохранять работоспособность в однопроводном режиме, если второй провод витой пары поврежден.
Высокоскоростной и низкоскоростной CAN автопроизводители могут называть по-своему, а также пользоваться любой из доступных скоростей передачи данных.
Межсетевой шлюз (CAN gateway)
Часто есть необходимость передавать информацию от блока управления, подключенного к быстрой CAN-шине, к блоку, подключенному к медленной CAN-шине, и наоборот. Например, блоку управления климатом нужно знать температуру двигателя.
Так как напрямую разные CAN-шины не соединить, для этих целей используется межсетевой шлюз (CAN gateway). К нему подключаются шины с разными скоростями. Это могут быть не только CAN-шины, но и другие шины, присутствующие в автомобиле, к примеру, FlexRay или Ethernet.

Часто в CAN gateway хранится информация об автомобиле, VIN номер и комплектация. Именно из него сканеры получают информацию при автоопределении автомобиля.
Сам межсетевой интерфейс может быть выполнен как отдельным блоком, так и встроен в другие блоки. Обычно это приборная панель, электронный замок зажигания или блок управления бортовой сети (Body Control Module — BCM).

Мы разобрались физическим уровнем CAN-шины. Теперь вы знаете, как напряжение на витой паре становится единицами и нолями, как биты передаются от одного блока управления к другому.
Канальный уровень CAN-шины (передача данных)
CAN является широковещательной шиной последовательной передачи данных. То есть данные отправляются по очереди бит за битом и при этом между узлами сети реализован один общий эфир, когда каждый слышит каждого.
Блоки управления, как и диагностический сканер, выступают узлами в сети CAN-шины. Но для того, чтобы все это заработало мало просто подавать в шину единицы и ноли. Нужно определить, какой узел будет говорить, какой слушать, каков будет формат сообщения, кому это сообщение адресовано и как будет подтверждаться правильность приема.
Эту задачу решает канальный уровень (data link layer), описанный в стандарте ISO 11898-1. Каждый узел может отправлять и принимать информацию кадр за кадром.
Существует четыре типа сообщений-кадров:
- Кадр данных (data frame). Передает информацию одному или нескольким узлам-приемникам.
- Кадр удаленного запроса (remote frame). Запрашивает данные у других узлов.
- Кадр ошибки (error frame). Сообщает об ошибках.
- Кадр перегрузки (overload frame). Сообщает о состоянии перегрузки.
Из чего состоит кадр CAN-шины
Рассмотрим структуру самого распространенного кадра Data frame.

SOF. Начало кадра
Первый бит кадра (SOF — Start Of Frame) всегда доминантный логический ноль. Он выводит шину из состояния холостого хода и начинает передачу данных.
Арбитражное поле
Дальше следует арбитражное поле. Оно используется для того, чтобы определить, какой из узлов получит доступ к вещанию по шине. Ведь передача данных последовательная, бит за битом, кадр за кадром. Соответственно узлам приходится ждать своей очереди для отправки сообщения в шину, но при этом слушают шину они постоянно.
Зачем нужен арбитраж CAN-шины
Арбитраж сообщений это процесс, в котором два или более CAN-контроллеров договариваются о том, кто должен использовать шину.
Любой узел может начать передачу данных, когда обнаружит незанятую шину. Это может привести к тому, что два или более контроллеров начнут передачу сообщения почти одновременно.
Нет такого блока, который будет вещать всегда первым. Первым всегда будет передавать информацию тот блок, чьё сообщение имеет наивысший приоритет. И как раз этот спор и решается в арбитражном поле. Разберемся как именно.
Как происходит арбитраж CAN-шины и что такое идентификатор
Представим, что есть три узла, которые одновременно хотят получить доступ к CAN-шине. После бита «Start Of Frame» каждый из этих блоков начинает отправлять биты идентификаторов в шину данных.

Идентификатор присвоен каждому сообщению и определяет его приоритет, то есть определяет, какое сообщение более важное и должно быть отправлено в первую очередь.
Все узлы одновременно, бит за битом, начинают отправлять идентификаторы кадров в шину данных. В это же время все узлы также и считывают каждый новый появившийся бит на шине.

Пока отправляемые биты у всех блоков совпадают, все идет без изменений. Но рано или поздно случается конфликт, когда разные узлы одновременно отправят разные биты. И вот тут самое время вспомнить, что доминантный бит (логический 0) перебивает рецессивный бит (логическую 1) в конфликтных ситуациях. Это реализовано аппаратно в схемотехнике трансивера.
Это условие приводит к тому, что узел, у которого рецессивный бит (логическая единица) проигрывает арбитраж тому узлу, у которого оказался доминантный бит (логический ноль).
Проиграв арбитраж, блок утрачивает доступ к шине и ждет в режиме «только чтение» следующего арбитража. При этом остальные блоки продолжают арбитраж. Но при каждом очередном конфликте один из них отсеивается. И так до тех пор, пока не останется всего один блок, чье сообщение оказалось самым приоритетным и выиграло арбитраж.
Выигравшему блоку принадлежит право отправить сообщение в шину, а потому именно он будет продолжать начатый кадр.
Важным условием успешного битового арбитража является то, что никакие два узла не могут передавать одно и то же поле арбитража. Из этого правила есть одно исключение: если сообщение не содержит данных, то любой узел может передать это сообщение.
Поскольку шина является проводной, а доминирующий бит логически равен 0, следует, что в арбитраже победит сообщение с численно наименьшим Арбитражным полем.
11-bit и 29-bit идентификаторы
11 бит дают возможность использовать только 2048 идентификаторов, то есть 2048 параметров Этого иногда бывает недостаточно. В этом случае используется 29-битый ID. Таким образом, появляется возможность использовать миллионы идентификаторов.

Кадр с расширенным 29-битным идентификатором (CAN 2.0B) идентичен кадру с 11-битным идентификатором (CAN 2.0A), за исключением более длинного идентификатора. Он используется, например, в протоколе J1939 для большегрузных автомобилей.
Что произойдет, если узел будет один на шине и попытается передать сообщение?
Блок, конечно, выиграет арбитраж и с радостью продолжит передачу сообщения. Но когда придет время подтверждения… ни один узел не пошлет доминирующий бит подтверждения ACK (о нем ниже).
Передатчик почувствует ошибку ACK, пошлет флаг ошибки, увеличит свой счетчик ошибок передачи на 8 и начнет повторную передачу. Это произойдет 16 раз. Затем передатчик перейдет в режим пассивной передачи ошибок.
По специальному правилу алгоритма ограничения ошибок, счетчик ошибок передачи не увеличивается, если узел пассивен и ошибка является ошибкой ACK. Таким образом, узел будет продолжать передачу вечно, по крайней мере, до тех пор, пока кто-то не подтвердит сообщение.
RTR. Запрос на удаленную передачу.
Следующий бит Remote Transmission Request (RTR). Это бит запроса. Он определяет какого типа будет сообщение:
- Dataframe, когда вещающий блок сообщает информацию или
- Remote frame, когда передающий блок запрашивает информацию.
Поле Control
Дальше следует поле Control, в котором первый бит ID extension. Если в нем будет логический ноль, то будет использоваться стандартный 11-битный идентификатор, а если логическая единица, то расширенный 29-битный.

Каждый идентификатор это какой-то параметр. Например, обороты двигателя, температура, состояние замка зажигания, угол поворота руля, скорость автомобиля, запрос на включение кондиционера и так далее.
Биты DL3 — DL0 в поле Control используется для определения заранее количества байтов, которые будут передаваться в следующем поле Data. Чтобы не передавать лишние биты и сократить время фрейма, тем самым увеличив скорость передачи данных. По этой же причине по-умолчанию используется 11-битный идентификатор, чтобы без надобности не тратить время на лишние 18 бит.
Поле Data
В поле Data находится самая полезная информация, которую нужно передать. Обороты, скорость, нагрузка и т. п.

Ради передачи этой информации и строится весь фрейм. Это поле может составлять от 1 до 8 байт, то есть от 8 до 64 бит.
CRC. Контрольная сумма
Следующее поле это контрольная сумма CRC (Cyclic Redundancy Check). Представляет собой значение, вычисленное по определенной формуле, на основе битов из предыдущих полей.

То есть все эти биты обрабатываются определенным алгоритмам в блоке-отправителе. Результат этой отработки записывается в поле контрольной суммы кадра.
После этого уже блок-получатель повторно вычисляет контрольную сумму CRC таким же алгоритмом, но уже на базе полученной информации.
Если каждый из битов был распознан правильно, то контрольная сумма у блока-получателя будет такой же, как и у блока-отправителя. В этом случае данные считаются переданными без ошибок.
Если же контрольная сумма не сходится, распознается ошибка передачи данных и полученная информация игнорируется.
ACK. Бит подтверждения
Следующим идет бит подтверждения ACK (Acknowledge). Узел-отправитель выставляет в нем рецессивное состояние, но узел-получатель перебивает его доминантным в случае успешного приема, тем самым подтверждая передачу сообщения.

Отправитель проверяет наличие бита подтверждения и повторно передает сообщение, если подтверждение не было обнаружено.
Наличие бита подтверждения на шине не означает, что любой из предполагаемых адресатов получил сообщение. Единственное, что мы знаем, это то, что один или несколько узлов на шине приняли его правильно.
EOF. Конец кадра
Дальше идут 7 бит поля End of Frame (EOF). Это конец кадра, после которого кадр завершается и шина снова переходит состояние холостого хода.

И так до тех пор, пока один или несколько блоков снова не начнут отправлять сообщения.
Адресация и идентификация сообщений CAN-шины
Стоит еще раз отметить, что в CAN-сообщениях нет явного адреса. Каждый узел принимает весь трафик на шине. Используя аппаратные фильтры и программное обеспечение, он определяет, является ли сообщение «интересным» или нет.
Фактически, в CAN не существует понятия адреса сообщения. Вместо этого, содержимое сообщений идентифицируется по ID, который присутствует в кадре. Считается, что сообщения CAN имеют «адрес содержимого».
Обычный адрес сообщения будет выглядеть так: «Вот сообщение для узла N». Сообщение с адресом содержимого выглядит так: «Вот сообщение, содержащее данные с меткой N». Разница между этими двумя понятиями небольшая, но существенная.
Содержимое поля арбитража, согласно стандарту, используется для определения приоритета сообщения на шине. Все контроллеры CAN также используют все поле арбитража (некоторые используют только часть) в качестве ключа в процессе аппаратной фильтрации.
Стандарт не говорит, что поле арбитража должно использоваться в качестве идентификатора сообщения. Тем не менее это очень распространенное использование.
Что такое CAN FD (Flexible Data Rate CAN)?
С расширением функциональности автомобиля возрастает и нагрузка на CAN-шину. CAN FD (Flexible Data Rate) была разработана как шина CAN «следующего поколения».

Стандартная длина каждого сообщения была увеличена в 8 раз — с 8 до 64 байт, а максимальная скорость передачи данных была аналогично увеличена с 1 Мбит/с до 8 Мбит/с. Одним словом, CAN FD повышает скорость и эффективность. Поэтому она используется в современных автомобилях.
CAN FD обратно совместим и поддерживает протокол CAN 2.0, а также специальные протоколы, такие как SAE J1939.
CAN FD по сути является расширением оригинального стандарта CAN, как указано в ISO 11898-1, и полностью совместим с классическими CAN-шинами.
Отличия CAN FD от обычной CAN-шины
- CAN FD работает одновременно на двух скоростях. Поле арбитража или заголовок кадра передается со стандартной скоростью, например 500 кбит/с. А поле данных передается на скорости в несколько раз выше, вплоть до 8 Мбит/с.
- Размер сообщения увеличен до 64 байт. В обычной CAN-шине — максимум 8 байт.
- Контроллер CAN FD способен принимать обычные CAN сообщения, а стандартный CAN узел не может принимать кадры формата CAN FD.
- Для шины CAN FD нужны специальные микросхемы-трансиверы с повышенным быстродействием.

В настоящее время CAN FD используется в высокопроизводительных автомобилях, но по мере развития ЭБУ и снижения стоимости аппаратного обеспечения CAN FD, это лишь вопрос времени, когда CAN FD появится практически во всех автомобилях.
Будущее шины CAN
В будущем протокол шины CAN будет оставаться актуальным, хотя на него будут влиять основные тенденции:
- Потребность во все более расширяющихся функциях автомобиля.
- Рост облачных вычислений.
- Развитие Интернета вещей (Internet of Things — IoT).
- Развитие самоуправляемых автомобилей (без водителя).
В частности, рост числа подключенных автомобилей V2X и облачных вычислений приведет к быстрому росту автомобильной телематики и IoT CAN-регистраторов.
В свою очередь, перевод сети шины CAN в режим «онлайн» также подвергает автомобили рискам безопасности и может потребовать перехода на новые протоколы CAN, такие, как CAN FD.
Максимальная скорость CAN-шины
Максимальная скорость шины CAN, согласно стандарту, составляет 1 Мбит/с. Тем не менее некоторые CAN-контроллеры могут работать и с более высокими скоростями.
Медленный CAN low speed (ISO 11898-3) может работать на скорости до 125 кбит/с.
Однопроводной CAN может работать со скоростью около 50 кбит/с в стандартном режиме, а в специальном высокоскоростном режиме, используемом, например, для программирования ЭБУ, — до 100 кбит/с.
Максимальная длина кабеля в CAN-шине
При скорости 1 Мбит/с максимальная длина кабеля может составлять около 40 метров. Это связано с тем, что схема арбитража требует, чтобы волновой фронт сигнала успел распространиться до самого удаленного узла и обратно. Другими словами, длина кабеля ограничена скоростью света.
Другие максимальные длины кабелей (значения приблизительны):
- 100 метров при скорости 500 кбит/с;
- 200 метров — при 250 кбит/с;
- 500 метров — при 125 кбит/с;
- 6 километров — при 10 кбит/с.
Если для обеспечения гальванической развязки используются оптопары, максимальная длина шины соответственно уменьшается.