©А. Пахомов (CTTeam, Школа Диагностики Алексея Пахомова).
 В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
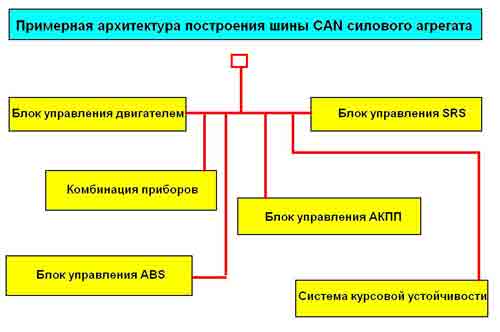
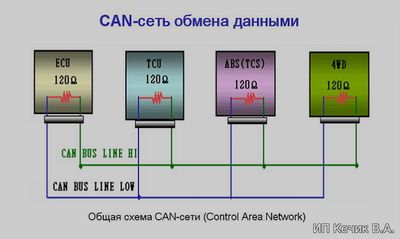
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2,5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:
Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
Поговорим о топологии CAN-шины. Физически у шины нет начала и нет конца, шина – это просто единая сеть. Чаще всего встречаются два типа топологии: линейная топология и топология «пассивная звезда», а также их сочетания.
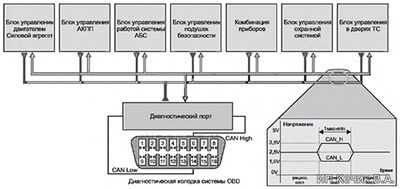
На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Перед нами автомобиль Infinitit Q50, оснащенный весьма редким турбированным мотором VR30DDT объемом 3.0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:
Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1);
- CAN communication circuit 2 (Коммуникационная цепь CAN 2);
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1:
А это – блоки цепи CAN 2. Как видно, связи с ними попросту нет:
Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2.
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1, а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1, а на контакты 12 и 13 – провода CAN 2.
Снимаем осциллограмму в цепи CAN 1. Она имеет прямо-таки академический вид:
Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2,26 В, на проводе CAN Low – 2,25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3,58 В, на проводе CAN Low – 1,41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13, чтобы получить осциллограмму сигнала CAN 2. Вот она:
Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
То, что вы видите на этой осциллограмме, называется «мусор». Часто диагносты так и говорят: блок мусорит в шину. Вот только как найти блок, который это делает? Методика здесь очень проста и сводится она к поочередному отключению блоков и повторному наблюдению за сигналом шины.
Где именно находится тот или иной блок на автомобиле, в документации, как правило, показано. Например, на этом «финике» блоки расположены так:
Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2:
Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:
Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0,2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Как найти провода can шины
Диагностика и ремонт: CAN — шина
Именно так выглядит ( в основном) та самая «шина CAN «, с которой в последнее время нам придется сталкиваться все чаще и чаще:

Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
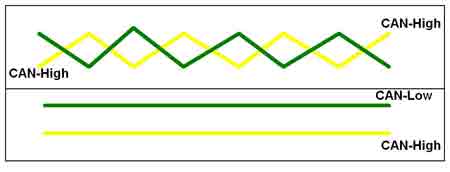
CAN-High — желтым цветом
CAN-Low — зеленым цветом
Всего существует несколько разновидностей шин CAN , определяемых выполняемыми ими функциями:
Шина CAN силового агрегата (быст рый канал ) .
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медле нный канал ) .
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно — командной системы (медленн ый канал ), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами ) .
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH ).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:

Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair . А провода, которые образуют эту пару, называются CAN High и CAN Low .
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:
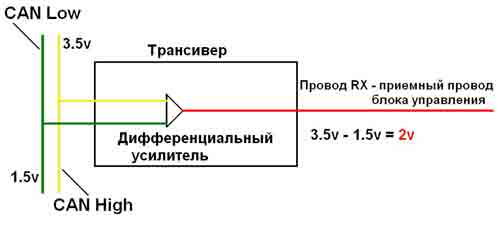
Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
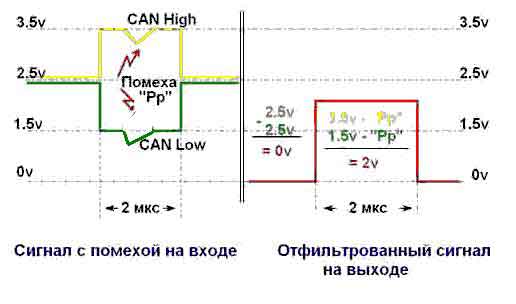
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – » Pp «) вычитается из напряжения
на проводе High (3,5 В – » Pp «) и в обработанном сигнале помеха отсутствует ( » Pp » — помеха).
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Вас также может заинтересовать:
Шина CAN — это страшно?
Источник
—>Автозапчасти и СТО —>
Бортовые системы электроники в современных легковых и грузовых автомобилях обладают огромным количеством дополнительных устройств и исполнительных механизмов. Для того, чтобы обмен информацией между всеми устройствами был максимально эффективен, в автомобиле должна быть надежная коммуникационная сеть. В начале 80-ых годов 20 века компания Bosch и разработчик Intel предложили новый сетевой интерфейс – Controller Area Network, который в народе называется Can-шина.
О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
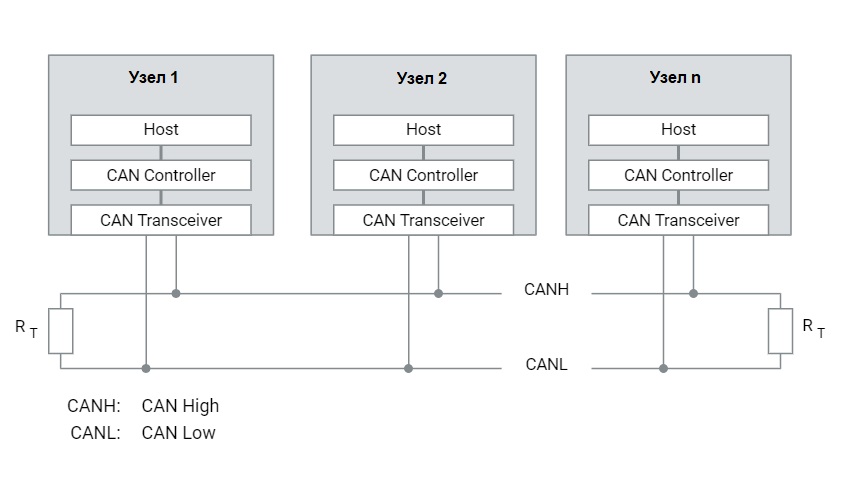
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
Особенности работы сети
Следует понимать, что данные по CAN-сети передаются в виде кадров. Наиболее важные из них – это поле идентификатора (Identifire) и система данных (Data). Наиболее часто используемый тип сообщения по Кан-шине – Data Frame. Данный тип передачи данных состоит из так называемого арбитражного поля и определяет приоритетную передачу данных в том случае, если сразу несколько узлов системы передают данные на CAN-шину.
Каждое из подключенных к шине устройств управления имеет свое входное сопротивление, а общая нагрузка рассчитывается из суммы всех подключенных к шине исполняемых блоков. В среднем, входное сопротивление систем управления двигателем, которые подключаются на CAN-шину, составляет 68-70 Ом, а сопротивление информационно-командной системы может составлять до 3-4 ОМ.
CAN — интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу «К»-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
Важно отметить, что определенных стандартов для разъемов сети Can на сегодняшний день не существует. Поэтому каждый из протоколов определяет свой тип разъемов на CAN-шине, в зависимости от нагрузки и других параметров.
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
Основные режимы работы CAN-шины: активный (зажигание включено); спящий (при выключенном зажигании); пробуждение и засыпание (при включении и выключении зажигания). Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
Преимущества и недостатки применения КАН-шины в автомобиле Начать следует с того, что, если бы в 80-х годах прошлого века не был предложен стандарт CAN, его место обязательно занял другой вид взаимодействия систем автомобиля. Можно, конечно, разместить все блоки управления системами автомобиля в едином суперблоке, в котором программно обеспечить взаимодействие разных систем. Такие попытки были у французских производителей. Однако, с увеличением функциональности и производительности значительно увеличивается вероятность отказов. Сбои, например, дворников, могут привести к отказу запуска двигателя. Основные преимущества применения CAN-шины: возможность проведения оперативного контроля и диагностики всех систем автомобиля; объединение потоков информации в едином помехозащищенном канале; универсальность, способствующая унификации процессов диагностирования; возможность подключения охранных систем по CAN-шине (нет необходимости тянуть проводку к каждому элементу контроля). Недостатки CAN-шины: невысокая надежность; повреждение одного из блоков управления может привести к полной неработоспособности CAN-соединения. Устранение неисправностей На приборной панели автомобиля отсутствует индикаторная лампа неисправности CAN. Судить о том, что работоспособность CAN-шины нарушается, можно по косвенным показателям: на приборной панели одновременно загорелись несколько индикаторных ламп неисправностей; пропали показатели температуры охлаждающей жидкости, уровни топлива; загорелся «CHECK ENGINE». Прежде всего, следует выполнить диагностику. Если она покажет на неисправность CAN-шины, следует приступить к устранению проблемы. Последовательность работ: Найти проводники витой пары шины. Часто они имеют черный (высокий уровень) и оранжево-коричневый (низкий) цвета. Проверить при включенном зажигании с помощью мультиметра напряжения на проводниках. Уровни не должны быть равны 0 или более 11 Вольт (обычно около 4,5 Вольта). Выключить зажигание, снять клемму аккумуляторной батареи. Измерить сопротивление между проводниками. Если оно будет стремиться к нулю, значит, в шине присутствует короткое замыкание, если к бесконечности – обрыв. Приступить к поиску обрыва или короткого замыкания. Если есть подозрение на то, что замыкание шины происходит по причине отказа какого-либо блока управления, можно последовательно отключать блоки управления и контролировать сопротивление и работоспособность шины. Неисправность CAN-шины относится к сложным неисправностям электрооборудования автомобиля. Если у автовладельца нет необходимых навыков ремонта электрики, то лучше воспользоваться услугами специалиста.
CAN-шина – это электронное устройство, встроенное в электронную систему автомобиля для контроля технических характеристики и ездовых показателей. Она является обязательным элементом для оснащения автомобиля противоугонной системой, но это лишь малая часть её возможностей.
Источник: lubimauto.ru, voditeliauto.ru.
Источник
CAN шина – это сеть обмена данными определенная в стандарте ISO 11898. Другие каналы обмена данными в автомобиле не могут быть названы CAN шиной. AVC-LAN, BEAN, J1708, VAN и другие старые протоколы это НЕ CAN !
В автомобиле может быть более одной CAN шины. Для каждого функционального сегмента автомобиля выделяется своя сеть CAN. Выделенные сети могут работать на разных скоростях.
Скорости работы CAN шины
CAN на разных автомобилях и в разных сегментах сети может работать на разных скоростях.
Названия сегментов сети: Мотор, Шасси, Комфорт, Салон – условны! У Каждого автопроизводителя свои названия этих участков сети!
- Группа VAG: Моторшасси – 500 кбитс, Комфорт – 100 кбитс и с 2018 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- BMW: МоторШасси – 500кбитс, Комфорт – 100 кбитс и с 2018 года шина Комфорт может иметь скорость 500 кбитс., Диагностика: 500 кбитс.
- Mercedes-Benz: МоторШасси – 500 кбитс, Комфорт 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Ford, Mazda: МоторШасси – 500 кбитс, Комфорт 125 кбитс. (Для Ford может быть больше вариантов)
- KIAHyundai: МоторШасси – 500 кбитс, Комфорт 125 кбитс, 500 кбитс, Мультимедиа: 125 кбитс, 500 кбитс., Диагностика: 500 кбитс.
- GM: МоторШасси – 500 кбитс, Комфорт: 33.333 кбитс, 95.2 кбитс, Диагностика: 500 кбитс.
- Toyota, Nissan, Honda, Subaru, Suzuki: 500 кбитс (может использоваться гейтвей! Изучайте сетевую архитектуру автомобиля!)
- Mitsubishi: МоторШасси: 500 кбитс, СалонКомфорт – 83.333 кбитс, 250 кбитс, Диагностика: 500 кбитс.
- Volvo: МоторШасси: 500 кбитс, СалонКомфорт – 500 кбитс, 125 кбитс, Диагностика: 500 кбитс.
- Renault: 500 кбитс
- Peugeot: МоторШасси – 500 кбитс, Комфорт 125 кбитс.
- Lada: 500 кбитс
- Коммерческая и специальная техника: Стандарт J1939 250 или 500 кбитс.
Сегментация CAN шины по функциональному назначению
- Как правило разные, сегменты сети разделены специальным устройством, которое называется Гейтвей (Gateway, ZGW, ETACS, ICU) .
- В роли гейтвея может выступать панель приборов (для простых автомобилей) или отдельный специальный модуль межсетевого интерфейса.
- Гейтвей разделяет потоки данных в разных сегментах сети и обеспечивает связь сегментов сети работающих на разных скоростях.
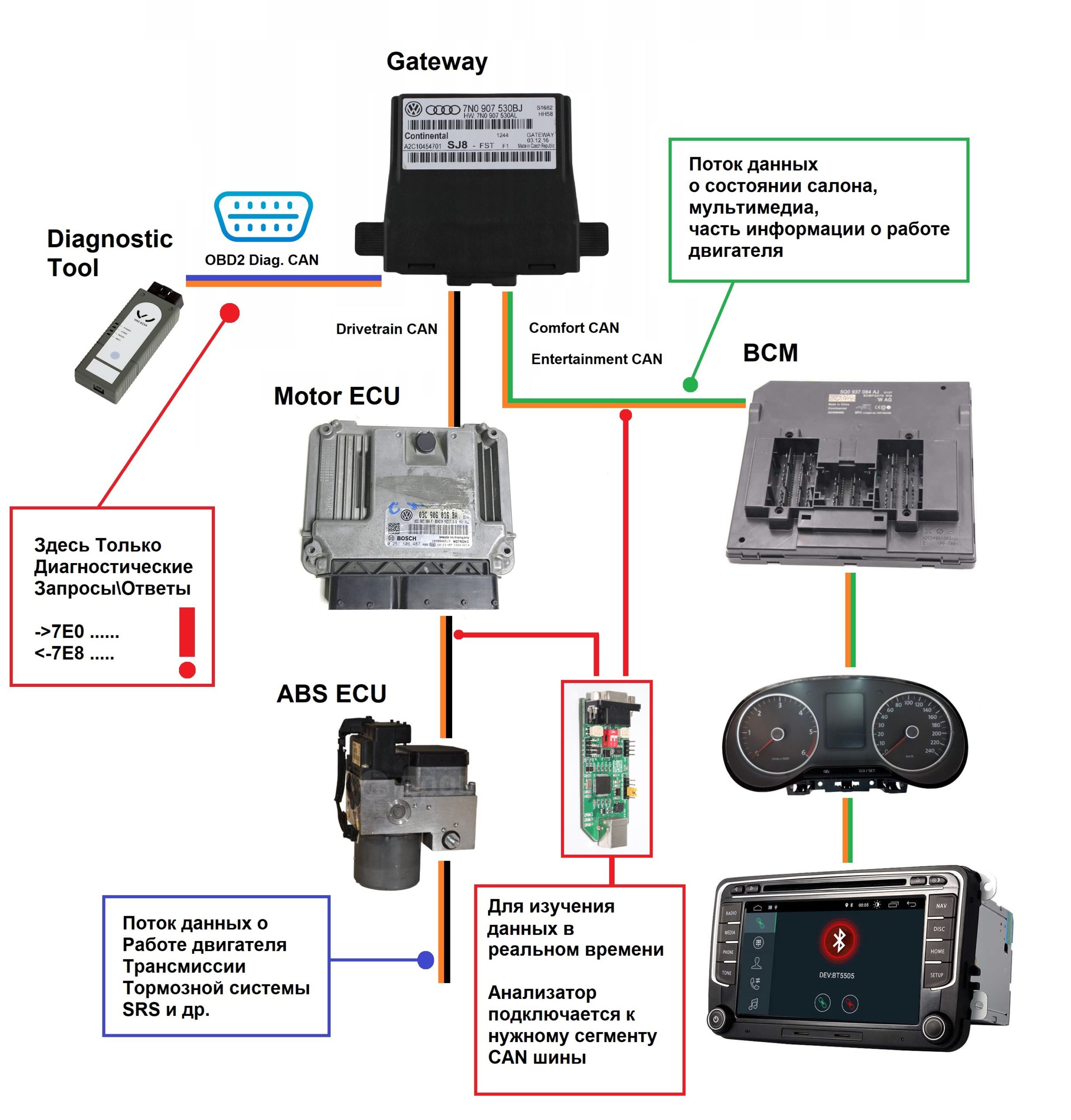
- ВАЖНО: На многих современных автомобилях CAN шина в диагностическом разъеме OBD2 отделена от других участков сети при помощи гейтвея (Gateway), поэтому подключившись к CAN шине OBD разъема невозможно увидеть поток данных. В этом случае можно увидеть только обмен между диагностическим инструментом и автомобилем во время процесса диагностики! Так же модулем Gateway оборудованы автомобили японских марок >2016г. в зависимости от модели. Автомобили немецких марок оборудуются таким модулем с момента появления в них CAN шины.
- ОБЯЗАТЕЛЬНО изучайте схемы на исследуемый автомобиль, чтобы знать к какому сегменту сети Вы подключаетесь!
Схема ниже изображена в общем виде для упрощения понимания роли Гейтвея. Количество CAN шин и варианты включения блоков управления к тому или другому сегменту сети могут отличаться.
Реализации CAN на уровне электрических сигналов
CAN шина может быть реализована физически тремя способами:
1 ISO11898-2 или CAN-High Speed.
Классическая витая пара нагруженная с обоих концов резисторами 120 Ом.
В этом случае уровни на шине CAN выглядят так:
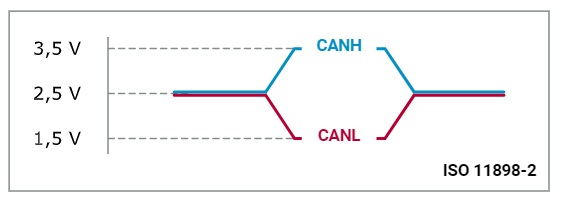
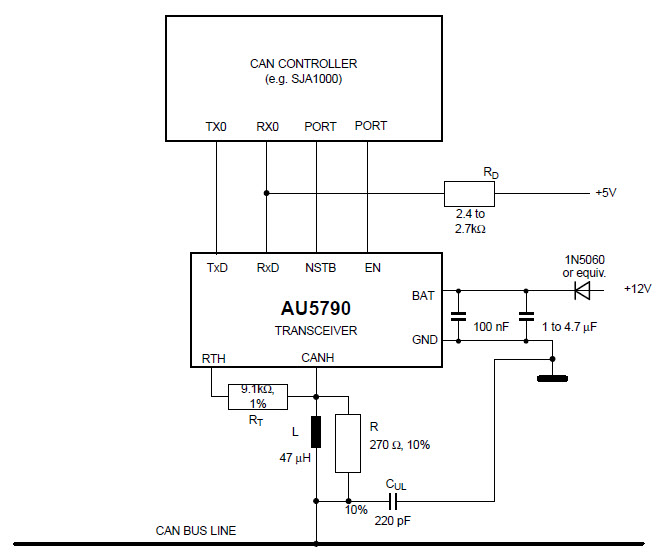
Для такой реализации сети используются как правило обычные CAN трансиверы в 8 выводном корпусе, аналоги PCA82C250, TJA1050 и им подобные. Работает такая конфигурация на скоростях 500 кбитс и выше. (Но могут быть исключения) .
2 ISO11898-3 или CAN-Low Speed или Faut Tolerant CAN
В этом варианте используется та же витая пара, но линии CAN-Low и CAN-High подтянуты к напряжению питания и массе соответственно.
Подробное описание FT-CAN по ссылке
 Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбитс.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий.
Такой вариант CAN шины способен переключаться в однопроводный режим в случае повреждения одной из линий. Работает на скоростях до 250 кбитс.Уровни сигнала на шине отличаются от High Speed CAN, при этом не теряется возможность работы с шиной FT-CAN используя трансиверы High-Speed CAN и соблюдая ряд условий.
Подробнее в нашей статье о FT-CAN – ссылка.
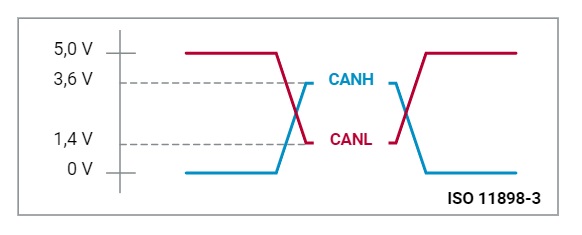
Fault tolerant CAN обычно используется для низкоскоростного обмена между блоками управления относящимися к сегменту сети СалонКомфортМультимедиа.
ВАЖНО: При подключении к шине Faul tolerant CAN, подключать терминальный резистор 120 Ом между линиями CAN-High и CAN-Low НЕ НУЖНО !
3 Single Wire CAN или SW-CAN
Однопроводный вариант шины CAN. Работает на скорости 33.333 кбитс
Используется специальный тип трансиверов. Для того что бы подключиться к такому варианту шины CAN необходимо линию CAN-High анализатора подключить к шине SW-CAN а линию CAN-Low к массеземле.
Именно так выглядит ( в основном) та самая «шина CAN«, с которой в последнее время нам придется сталкиваться все чаще и чаще:
фото 1
Это обыкновенный двухпроводной кабель получивший название Twisted Pair.
На приведенном фото 1 показаны провода CAN High и CAN Low силового агрегата.
По этим проводам производится обмен данными между блоками управления, они могут нести информацию о скорости автомобиля, скорости вращения коленчатого вала, угле опережения зажигания и так далее.
Обратите внимание, что один из проводов дополнительно помечен черной полоской. Именно таким образом отмечается и визуально определяется провод CAN High (оранжево-черный).
Цвет провода CAN-Low — оранжево-коричневый.
За основной цвет шины CAN принят оранжевый цвет.
На рисунках и чертежах принято изображать цвета проводов шины CAN другими цветами, а именно:
фото 2
CAN-High — желтым цветом
CAN-Low — зеленым цветом
Всего существует несколько разновидностей шин CAN, определяемых выполняемыми ими функциями:
Шина CAN силового агрегата (быстрый канал).
Она позволяет передавать информацию со скоростью) 500 кбит/с и служит для связи между блоками управления (двигатель — трансмиссия)
Шина CAN системы «Комфорт» (медленный канал).
Она позволяет передавать информацию со скоростью 100 кбит/с и служит для связи между блоками управления, входящими в систему «Комфорт».
Шина данных CAN информационно—командной системы (медленный канал), позволяющая передавать данные со скоростью 100 kBit/s. Обеспечивает связь между различными обслуживающими системами ( например, телефонной и навигационной системами).
Новые модели автомобилей все более становятся похожими на самолеты — по количеству заявленных функций для безопасности, комфорта и экологичности. Блоков управления становится все больше и больше и «тянуть» от каждого грозди проводов — нереально.
Поэтому кроме шины CAN уже существуют другие шины, получившие названия:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetooth
Но не будем «расплываться мыслью по древу», заострим наше внимание пока что на одной конкретной шине: CAN ( по взглядам корпорации BOSCH).
На примере шины CAN силового агрегата можно посмотреть форму сигнала:
фото 3
Когда на High шине CAN доминантное состояние, то напряжение проводе повышается до 3.5 вольт.
В рецессивном состоянии напряжение на обоих проводах равняется 2.5 вольта.
Когда на проводе Low доминантное состояние, то напряжение падает до 1.5 вольта.
(«Доминанта» — явление, доминирующее, главенствующее или господствующее в какой-либо сфере,- из словарей).
Для повышения надежности передачи данных, в шине CAN применяется дифференциальный способ передачи сигналов по двум проводам, имеющим название Twisted Pair. А провода, которые образуют эту пару, называются CAN High и CAN Low.
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Такое исходное состояние называется «состоянием покоя» или «рецессивом».
Каким образом передаются и преобразуются сигналы по CAN шине?
Каждый из блоков управления подсоединен к CAN шине посредством отдельного устройства под названием трансивер, в котором имеется приемник сигналов, представляющий собой дифференциальный усилитель, установленный на входе сигналов:
фото 4
Поступающие по проводам High и Low сигналы, поступают в дифференциальный усилитель, обрабатываются и поступают на вход блока управления.
Эти сигналы представляют собою напряжение на выходе дифференциального усилителя.
Дифференциальный усилитель формирует это выходное напряжение как разность между напряжениями на проводах High и Low шины CAN.
Таким образом исключается влияние величины базового напряжения (у шины CAN силового агрегата оно равно 2,5 В) или какого либо напряжения, вызванного, например, внешними помехами.
Кстати, насчет помех. Как говорят, «шина CAN довольно устойчива к помехам, поэтому она нашла такое широкое применение».
Попробуем разобраться с этим.
Провода шины CAN силового агрегата расположены в моторном отсеке и на них могут воздействовать помехи различного порядка, например, помехи от системы зажигания.
Так как шина CAN состоит из двух проводов, которые перекручены между собой, то помеха одновременно воздействует на два провода:
фото 5
Из вышеприведенного рисунка видно, что происходит далее: в дифференциальном усилителе напряжение на проводе Low (1,5 В – «Pp«) вычитается из напряжения
на проводе High (3,5 В – «Pp«) и в обработанном сигнале помеха отсутствует ( «Pp» — помеха).
Примечание: По наличию времени статья может иметь продолжение — много еще остается «за кадром».
Кучер В.П.
© Легион-Автодата
Вас также может заинтересовать:
Шина CAN — это страшно?
Шина CAN системы «Комфорт»
Шина данных CAN — небольшая заметка по устройству
CAN Технологии
Применяемая на автомобилях система CAN (Controller_Area_Network) позволяет установить связь между отдельными электронными блоками управления. При эксплуатации автомобиля и при диагностике его агрегатов эта система предоставляет возможность использования новых функций, которые не могут быть возложены на отдельно действующие блоки управления.
Применяемая на автомобилях система CAN позволяет объединить в локальную сеть электронные блоки управления или сложные датчики, как, например, датчик угла поворота рулевого колеса. Обозначение CAN является сокращением от выражения Controller:Area:Network (локальная сеть, связывающая блоки управления). Применение системы CAN на автомобиле дает следующие преимущества:
Обмен данными между блоками управления производится на унифицированной базе. Эту базу называют протоколом. Шина CAN служит как бы магистралью для передачи данных.
Независимо действующие системы, например, система курсовой стабилизации ESP, могут быть реализованы с меньшими затратами.
Упрощается подключение дополнительного оборудования.
Шина данных CAN является открытой системой, к которой могут быть подключены как медные провода, так и стекловолоконные проводники.
Диагностика электронных блоков управления производится посредством кабеля «К».
Диагностика некоторых компонентов оборудования салона автомобиля уже сегодня производится через шину CAN (например, это подушки безопасности и блоки управления в дверях автомобиля). В данном случае речь идет о так называемом виртуальном кабеле «К». В будущем необходимость в кабеле «К» должна отпасть.
Можно проводить одновременную диагностику нескольких блоков управления, входящих в систему.
CAN
Промышленная сеть CAN (Controller Area Network) была создана в конце 80-х годов фирмой Bosch как решение для распределенных систем, работающих в режиме реального времени. Первая реализация CAN применялась в автомобильной электронике, однако сейчас CAN находит применение практически в любых типах машин и промышленных установок, от простейших бытовых приборов до систем управления ускорителями элементарных частиц. В настоящий момент CAN-протокол стандартизован в международном стандарте ISO 11898.
Основные положения стандарта CAN.
В качестве среды передачи в CAN используется дифференциальная линия связи — витая пара, сигналы по которой передаются в дифференциальном режиме.
Для контроля доступа к среде передачи используется метод недеструктивного арбитража.
Данные передаются короткими (максимальная длина поля данных — 8 байт) пакетами, которые защищены контрольной суммой.
В CAN отсутствует явная адресация сообщений. Вместо этого каждый пакет снабжен полем арбитража (идентификатор+RTR-бит), которое задает приоритет сообщения в сети.
CAN имеет исчерпывающую схему контроля ошибок, которая гарантирует повторную передачу пакета, в случае возникновения ошибок передачи/приема сообщения.
В CAN существует способ автоматического устранения узла, являющегося источником ошибочных пакетов в сети.
CAN контроллеры.
Протокол CAN полностью реализован аппаратно — в виде микросхем- CAN контроллеров или в виде стандартного периферийного устройства в составе микросхемы- микроконтроллера. Все производители современных микроконтроллеров по крайней мере в одном из семейств имеют микроконтроллеры со встроенным периферийным одним или несколькими CAN-контроллерами. Таким образом, сегодня, СAN-контроллер является таким же стандартным периферийным устройством как контроллер SPI, I2C или UART.
Что такое CAN-шина
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.
Рецессивные и доминантные биты
Для повышения надежности в CAN-шине используется принцип дифференциальной передачи данных, требующий двух проводов, CAN-High (CAN-H) высокий и CAN-Low (CAN-L) низкий уровень напряжения.

Как это исполнено физически
Физически CAN-шина – система из специального кабеля с разветвителями для подключения электронных блоков и конечных устройств-терминаторов (резисторов).
Содержание
- Используемый кабель
- Указания по проверке
- Информация по шине CAN
- Осциллографирование K-CAN, PT-CAN, F-CAN
- Порядок измерения сопротивления с согласующим сопротивлением K-CAN, PT-CAN и F-CAN
- PT‐CAN, F‐CAN
- Указание!
- Шина CAN не работает
Используемый кабель
Указания по проверке
- Проверка напряжения (осциллограф): Для проверки напряжения должна быть подсоединена АКБ и включено зажигание.
- Измерение сопротивления: При измерении сопротивления необходимо, чтобы измеряемый объект перед измерением был приведен в обесточенное состояние. Для этого отсоединяется аккумуляторная батарея. Подождать 3 минуты пока разрядятся все конденсаторы в системе.
Информация по шине CAN
Шина CAN (Controller Area Network) является последовательной системой шин связи и отличается следующими признаками:
- распространение сигнала происходит в обоих направлениях.
- Каждое сообщение принимают все абоненты шины. Каждый абонент шины сам решает, будет ли он использовать сообщение,
- Дополнительные абоненты шины добавляются простым параллельным включением.
- Шинная система образует систему с задающим устройством. Каждый абонент шины может быть задающим или исполнительным устройством, в зависимости от того, подключен ли он в качестве передатчика или приемника.
- В качестве средства передачи используется двухпроводное соединение. Обозначения проводов: низкий уровень CAN и высокий уровень CAN.
- Как правило, каждый абонент шины может поддерживать связь по шине со всеми другими абонентами шины. Обмен данными по шине регулируется по правилам доступа. Основным отличием между шиной передачи данных K-CAN (кузовная шина CAN), шиной PT-CAN (шина CAN двигателя и трансмиссии) и шиной F-CAN (шина CAN ходовой части)является:
- K-CAN: скорость передачи данных ок. 100 Кбит/с. Возможен однопроводной режим.
- PT-CAN: скорость передачи данных ок. 500 Кбит/с. Однопроводной режим не возможен.
- F-CAN: скорость передачи данных ок. 500 Кбит/с. Однопроводной режим не возможен.
Задающее устройство: задающее устройство является активным партнером по связи, от которого исходит инициатива связи. Задающее устройство имеет приоритет и управляет связью. Оно может посылать пассивному абоненту шины (исполнительному устройству) сообщения по системе шин и после запроса принимать его сообщения.
Исполнительное устройство: исполнительное устройство является пассивным участником связи. Оно получает команду получать и передавать данные.
Система с задающим устройством: в системе с задающим устройством участники связи могут в определенный момент времени брать на себя роль задающего или исполнительного устройства.
Осциллографирование K-CAN, PT-CAN, F-CAN
Для большей ясности, работает ли шина CAN безупречно, необходимо понаблюдать связь по шине. При этом нет необходимости анализировать отдельные биты, а нужно лишь убедиться, что шина CAN работает. Осциллографирование показывает: ”шина CAN очевидно работает без нарушений”.
При измерении с помощью осциллографа напряжения между проводом низкого уровня CAN (или высокого CAN-High) и массой получают прямоугольный сигнал в пределах напряжения :
Низкий уровень CAN относительно массы: U мин = 1 В и U макс = 5 В
Высокий уровень CAN относительно массы: U мин = 0 В и U макс = 4 В
Эти значения являются приблизительными и могут отличаться, в зависимости от нагрузки шины, на величину до 100 мВ.
Настройки осциллографа для измерения на шине K-CAN:
| CH1: | Щуп 1, ранг 2 В/дел; соединение DC |
| CH2: | Щуп 2, ранг 2 В/дел; соединение DC |
| Время: | 50 мс/дел |
Рис. 1: Измерение K-CAN: CH1 низкий уровень CAN, CH2 высокий уровень CAN
При измерении с помощью осциллографа напряжения между проводом низкого уровня CAN (или высокого CAN-High) и массой получают прямоугольный сигнал в пределах напряжения :
Низкий уровень CAN относительно массы: U мин = 1,5 В и U макс = 2,5 В
Высокий уровень CAN относительно массы: U мин = 2,5 В и U макс = 3,5 В
Эти значения являются приблизительными и могут отличаться, в зависимости от нагрузки шины, на величину до 100 мВ.
Настройки осциллографа для измерения на шине PT-CAN (или F-CAN):
| CH1: | Щуп 1, ранг 1 В/дел; соединение DC |
| CH2: | Щуп 2, ранг 1 В/дел; соединение DC |
| Время: | 10 мс/дел |
Рисунок 2: Измерение PT-CAN: CH1 низкий уровень CAN, CH2 высокий уровень CAN
Порядок измерения сопротивления с согласующим сопротивлением K-CAN, PT-CAN и F-CAN
- Шина CAN должна находиться в обесточенном состоянии
- Не должны быть подключены другие измерительные приборы (параллельное включение измерительных приборов)
- Измерение производится между проводами низкого уровня CAN и высокого уровня CAN
- Фактические значения могут отличаться от заданных значений на несколько Ом.
На шине K-CAN нельзя провести отдельное измерение сопротивления, так как сопротивление изменяется в зависимости от логики включения ЭБУ!
PT‐CAN, F‐CAN
Для предотвращения отражения сигнала два абонента шины CAN (с максимальным удалением в сети PT-CAN) нагружаются сопротивлением 120 Ом. Оба нагрузочных сопротивления включаются параллельно и образуют эквивалентное сопротивление 60 Ом. При отключенном напряжении питания это эквивалентное сопротивление можно измерить между линиями передачи данных. Кроме этого, можно по отдельности измерить отдельные сопротивления.
Указания по измерению с сопротивлением 60 Ом: Отсоединить от шины легкодоступный ЭБУ. Измерить сопротивление на разъеме между проводами CAN низкого и высокого уровней.
Указание!
Не на всех автомобилях имеется согласующее сопротивление на шине CAN Наличие встроенного согласующего сопротивления на подключенном автомобиле можно проверить по соответствующей электрической схеме.
Шина CAN не работает
Если шина передачи данных K-CAN или PT-CAN не работает, то, возможно, имеется КЗ или обрыв провода CAN высокого или низкого уровней. Или неисправен ЭБУ.
Для локализации причины неисправности рекомендуется действовать следующим образом:
- По очереди отсоединять абонентов шины CAN до тех пор, пока не будет найден блок, являющийся причиной неисправности (= ЭБУ X).
- Проверить провода к ЭБУ X на отсутствие КЗ или обрыва.
- При возможности проверить ЭБУ X.
- Такая последовательность действий приводит к успеху только в том случае, если короткое замыкание имеет проверяемый провод от ЭБУ к шине CAN. Если провод в шине CAN сам имеет короткое замыкание, то нужно проверить жгут проводов.
Оставляем за собой право на опечатки, смысловые ошибки и технические изменения.
Между проводами главной шины V и/или вспомогательных шин CAN может быть короткое замыкание, если сопротивление между контактами 6 (CANH) и 14 (CANL) разъема DLC3 составляет менее 54 Ом.
Короткое замыкание в главной шине CAN
Короткое замыкание во вспомогательной шине CAN
Щиток приборов в сборе
ЭБУ рулевого управления с усилителем
Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи)
Датчик положения рулевого колеса
ЭБУ системы SRS в сборе
ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе)
Блок управления системой кондиционирования в сборе
ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе)
ЭБУ предупреждения о недопустимой дистанции
ЭБУ сетевого шлюза
(для моделей с ЭБУ сетевого шлюза)
Дополнительный разъем (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
ЭБУ стояночного тормоза в сборе
Приемник системы навигации в сборе
(для моделей с приемником системы навигации)
Радиоприемник с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
Разъем распределительного блока шины CAN № 3
Разъем распределительного блока шины CAN № 4
ПРЕДОСТЕРЕЖЕНИЕ / ПРИМЕЧАНИЕ / УКАЗАНИЕ
Перед измерением сопротивления шины CAN, выключите зажигание и оставьте автомобиль в покое на 1 минуту или более, не приводя в действие ключ, любые другие переключатели и не открывая/закрывая двери. После этого, отсоедините провод от отрицательного (-) вывода аккумуляторной батареи и перед измерением сопротивления оставьте автомобиль в покое на 1 минуту или более.
После выключения зажигания следует подождать некоторое время, прежде чем отсоединять провод от отрицательного (-) вывода аккумуляторной батареи. Поэтому, прежде чем приступать к этой работе, обязательно ознакомьтесь с примечанием относительно отсоединения провода от отрицательного (-) вывода аккумуляторной батареи.
Так как порядок проведения диагностики важен для получения корректных результатов, начните поиск неисправностей с раздела «Порядок поиска неисправностей», если выводятся коды DTC, связанные с системой передачей данных CAN.
После ремонта выполните процедуру проверки кодов DTC и убедитесь, что коды DTC не выводятся снова.
Процедура проверки кодов DTC: Включите зажигание (IG), подождите не менее 61 с и затем двигайтесь на автомобиле со скоростью не менее 20 км/час (12 миль в час) в течение не менее 10 минут.
После ремонта выполните проверку шины CAN и убедитесь, что отображаются все ЭБУ и датчики, подсоединенные к системе передачи данных CAN.
Перед заменой главного ЭБУ кузова (бортового ЭБУ сети мультиплексной связи), ECM или ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) обратитесь к бюллетеню технического обслуживания.
Управление выключателем зажигания, какими-либо выключателями или дверями приводит к обмену данными между ЭБУ и датчиками по шине CAN. При осуществлении обмена данными сопротивление изменяется.
Если DTC регистрируется при непродолжительном движении на автомобиле даже после удаления кодов DTC, неисправность может возникать вследствие вибрации автомобиля. В подобных случаях необходимо пошевелить разъемы ЭБУ или жгутов проводов во время проверки, чтобы установить причину неисправности.
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЩИТОК ПРИБОРОВ)
Отсоедините провод от отрицательного (-) вывода аккумуляторной батареи.
Отсоедините разъем G16 щитка приборов.
Вид спереди разъема со стороны жгута проводов:
(к щитку приборов в сборе)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G16-23 (CANH) – G16-22 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
| Результат |
|---|
| Результат |
| OK |
| NG |
ЗАМЕНИТЕ ЩИТОК ПРИБОРОВ В СБОРЕ Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ECM)
Подсоедините разъем G16 щитка приборов в сборе.
Отсоедините разъем A53 ECM.
Вид спереди разъема со стороны жгута проводов:
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| A53-13 (CANH) – A53-26 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108-132 Ом |
| Результат |
|---|
| Результат |
| OK |
| NG |
ЗАМЕНИТЕ ECM Нажмите здесь Click here
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
Подсоедините разъем A53 ECM.
Отсоедините разъем G98 распределительного блока шины CAN № 4.
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 4)
*b к разъему № 3 распределительного блока шины CAN *c К щитку приборов в сборе *d к ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) *e К блоку управления системой кондиционирования *f к ЭБУ предупреждения о недопустимой дистанции *g
К ЭБУ сетевого шлюза
(для моделей с ЭБУ сетевого шлюза)
к дополнительному разъему (ЭБУ буфера шины)
(для моделей без ЭБУ сетевого шлюза)
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
Номинальное сопротивление Подключение диагностического прибора Условие Заданные условия Куда подсоединить G98-1 (CANH) – G98-11 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 108 – 132 Ом Разъем распределительного блока шины CAN № 3 G98-2 (CANH) – G98-12 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 108 – 132 Ом Щиток приборов в сборе G98-3 (CANH) – G98-13 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более ЭБУ сертификации (ЭБУ электронного ключа зажигания в сборе) G98-5 (CANH) – G98-15 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более Блок управления системой кондиционирования в сборе G98-6 (CANH) – G98-16 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более ЭБУ предупреждения о недопустимой дистанции G98-7 (CANH) – G98-17 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи 200 Ом или более ЭБУ сетевого шлюза*1 G98-7 (CANH) – G98-17 (CANL) Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи
200 Ом или более*3
1 МОм или более*4
Дополнительный разъем (ЭБУ буфера шины)*2
| Результат | |
|---|---|
| Результат | Следующий шаг |
| OK | А |
| NG (главная шина распределительного блока шины CAN № 3) | B |
| NG (отводная линия ЭБУ или датчика) | C |
| NG (главная шина щитка приборов) | D |
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4
ПЕРЕЙДИТЕ К ШАГУ 5 Click here
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ЩИТОК ПРИБОРОВ – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4)
ПРОВЕРЬТЕ ШИНЫ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
Отсоедините разъем G97 распределительного блока шины CAN № 3.
Вид спереди разъема со стороны жгута проводов:
(к разъему распределительного блока шины CAN № 3)
*b К DLC3 *c к датчику положения рулевого колеса *d К ECM *e К главному ЭБУ кузова (бортовому ЭБУ сети мультиплексной связи) *f К ЭБУ системы SRS в сборе *g К ЭБУ стояночного тормоза в сборе *h к ЭБУ системы противоскольжения (блоку управления рабочими цилиндрами тормозов) *i к разъему № 4 распределительного блока шины CAN *j
К приемнику системы навигации в сборе
(для моделей с приемником системы навигации)
к радиоприемнику с дисплеем в сборе
(для моделей с радиоприемником с дисплеем)
*l к ЭБУ рулевого управления с усилителем в сборе
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия | Куда подсоединить |
|---|---|---|---|
| G97-1 (CANH) – G97-11 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | DLC3 |
| G97-2 (CANH) – G97-12 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Датчик положения рулевого колеса |
| G97-3 (CANH) – G97-13 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 108 – 132 Ом | ECM |
| G97-4 (CANH) – G97-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Главный ЭБУ кузова (бортовой ЭБУ сети мультиплексной связи) |
| G97-5 (CANH) – G97-15 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы SRS в сборе |
| G97-6 (CANH) – G97-16 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ стояночного тормоза в сборе |
| G97-7 (CANH) – G97-17 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ системы противоскольжения (блок управления рабочими цилиндрами тормозов в сборе) |
| G97-8 (CANH) – G97-18 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 1 МОм или более | Разъем распределительного блока шины CAN № 4 |
| G97-9 (CANH) – G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Приемник системы навигации в сборе*1 |
| G97-9 (CANH) – G97-19 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | Радиоприемник с дисплеем в сборе*2 |
| G97-10 (CANH) – G97-20 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 200 Ом или более | ЭБУ рулевого управления с усилителем |
| Результат | |
|---|---|
| Результат | Следующий шаг |
| OK | А |
| NG (главная шина распределительного блока шины CAN № 4) | B |
| NG (отводная линия ЭБУ или датчика) | C |
| NG (вспомогательная шина DLC3) | D |
| NG (главная шина ECM) | E |
ЗАМЕНИТЕ РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ГЛАВНУЮ ШИНУ CAN ИЛИ РАЗЪЕМ (РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 4 – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА ШИНЫ CAN № 3)
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНЫЕ ШИНЫ CAN, ПОДКЛЮЧЕННЫЕ К DLC3
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ЛИНИИ ГЛАВНОЙ ШИНЫ CAN ИЛИ РАЗЪЕМ (ECM – РАЗЪЕМ РАСПРЕДЕЛИТЕЛЬНОГО БЛОКА CAN № 3)
ПРОВЕРЬТЕ ШИНУ CAN НА КОРОТКОЕ ЗАМЫКАНИЕ (ЭБУ, ДАТЧИК)
Подсоедините все жгуты проводов.
Отсоедините разъем, содержащий контакты CANH и CANL, от ЭБУ (или датчика), к которому подсоединена замкнутая накоротко вспомогательная шина.
| *1 | DLC3 |
Измерьте сопротивление в соответствии со значениями, приведенными в таблице ниже.
| Номинальное сопротивление |
|---|
| Подключение диагностического прибора | Условие | Заданные условия |
|---|---|---|
| G9-6 (CANH) – G9-14 (CANL) | Провод отсоединен от отрицательного (-) вывода аккумуляторной батареи | 54 – 69 Ом |
Если при отсоединении разъема от ЭБУ (или датчика) сопротивление стало нормальным (54–69 Ом), возможно короткое замыкание в ЭБУ (или датчике).
| Результат |
|---|
| Результат |
|---|
| OK |
| NG |
ЗАМЕНИТЕ СООТВЕТСТВУЮЩИЙ ЭБУ ИЛИ ДАТЧИК
ОТРЕМОНТИРУЙТЕ ИЛИ ЗАМЕНИТЕ ВСПОМОГАТЕЛЬНУЮ ШИНУ ИЛИ РАЗЪЕМ СООТВЕТСТВУЮЩЕГО ЭБУ ИЛИ ДАТЧИКА