1.21.
3АТУХАЮЩИЕ, ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ
Дифференциальное
уравнение затухающих колебаний и его
решение. Коэффициент затухания.
Логарифмический декремент
затухания. Добротность
колебательной
системы. Апериодический
процесс. Дифференциальное уравнение
вынужденных колебаний и его решение.
Амплитуда
и фаза вынужденных колебаний. Процесс
установления колебаний. Случай резонанса.
Автоколебания.
Затуханием
колебаний называется постепенное
уменьшение амплитуды колебаний с
течением времени, обусловленное потерей
энергии колебательной системой.
Собственные
колебания без затухания – это идеализация.
Причины затухания могут быть разные. В
механической системе к затуханию
колебаний приводит наличие трения.
Когда израсходуется вся энергия,
запасенная в колебательной системе,
колебания прекратятся. Поэтому амплитуда
затухающих
колебаний
уменьшается,
пока не станет равной нулю.
Затухающие колебания,
как и собственные, в системах, разных
по своей природе, можно рассматривать
с единой точки зрения – общих признаков.
Однако, такие характеристики, как
амплитуда и период, требуют переопределения,
а другие – дополнения и уточнения по
сравнению с такими же признаками для
собственных незатухающих колебаний.
Общие признаки и понятия затухающих
колебаний следующие:
-
Дифференциальное
уравнение должно быть получено с учетом
убывания в процессе колебаний
колебательной энергии. -
Уравнение колебаний
– решение дифференциального уравнения. -
Амплитуда затухающих
колебаний зависит от времени. -
Частота и период
зависят от степени затухания колебаний. -
Фаза и начальная
фаза имеют тот же смысл, что и для
незатухающих колебаний.
Механические
затухающие колебания.
Механическая
система:
пружинный маятник с учетом сил трения.
Силы,
действующие на маятник:
Упругая
сила.
![]() ,
,
где k
– коэффициент жесткости пружины, х –
смещение маятника от положения равновесия.
Сила
сопротивления.
Рассмотрим силу сопротивления,
пропорциональную скорости v
движения (такая зависимость характерна
для большого класса сил сопротивления):
![]() .
.
Знак “минус” показывает, что направление
силы сопротивления противоположно
направлению скорости движения тела.
Коэффициент сопротивления r
численно равен силе сопротивления,
возникающей при единичной скорости
движения тела:

Закон
движения
пружинного
маятника – это второй закон Ньютона:
ma
= Fупр.
+ Fсопр.
Учитывая,
что
![]() и
и
 ,
,
запишем второй закон Ньютона в виде:
 . (21.1)
. (21.1)
Разделив
все члены уравнения на m,
перенеся их все в правую часть, получим
дифференциальное
уравнение
затухающих колебаний:

Обозначим
![]() ,
,
где β
– коэффициент
затухания,
![]() ,
,
где ω0
– частота незатухающих свободных
колебаний в отсутствии потерь энергии
в колебательной системе.
В новых обозначениях
дифференциальное уравнение затухающих
колебаний имеет вид:
 .
.
(21.2)
Это линейное
дифференциальное уравнение второго
порядка.
Это
линейное дифференциальное уравнение
решается заменой переменных. Представим
функцию х, зависящую от времени t,
в виде:
![]() .
.
Найдем
первую и вторую производную этой функции
от времени, учитывая, что функция z
также является функцией времени:
![]() ,
,
 .
.
Подставим выражения
в дифференциальное уравнение:
 .
.
Приведем
подобные члены в уравнении и сократим
каждый член на
![]() ,
,
получим уравнение:
 .
.
Обозначим
величину
![]() .
.
Решением
уравнения
 являются
являются
функции
![]() ,
,
![]() .
.
Возвращаясь к
переменной х, получим формулы уравнений
затухающих колебаний:
![]()
![]() .
.
Таким
образом,
уравнение затухающих колебаний есть
решение дифференциального уравнения
(21.2):
![]()
![]()
(21.3)
Частота
затухающих колебаний:
![]() (физический
(физический
смысл имеет только вещественный корень,
поэтому
![]() ).
).
Период
затухающих колебаний:
 (21.5)
(21.5)
Смысл,
который вкладывался в понятие периода
для незатухающих колебаний, не подходит
для затухающих колебаний, так как
колебательная система никогда не
возвращается в исходное состояние из-за
потерь колебательной энергии. При
наличии трения колебания идут медленнее:
![]() .
.
Периодом
затухающих колебаний
называется минимальный промежуток
времени, за который система проходит
дважды положение равновесия в одном
направлении.
Для механической
системы пружинного маятника имеем:
 ,
,
 .
.
Амплитуда
затухающих колебаний:
![]() ,
,
для пружинного маятника
![]() .
.
Амплитуда
затухающих колебаний – величина не
постоянная, а изменяющаяся со временем
тем быстрее, чем больше коэффициент β.
Поэтому определение для амплитуды,
данное ранее для незатухающих свободных
колебаний, для затухающих колебаний
надо изменить.
При
небольших затуханиях амплитудой
затухающих колебаний
называется
наибольшее отклонение от положения
равновесия за период.
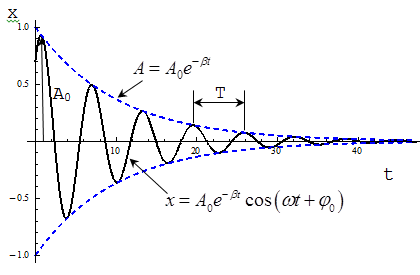
Графики
зависимости
смещения от времени
![]() и
и
амплитуды от времени
![]() представлены
представлены
на Рисунках 21.1 и 21.2.

Рисунок
21.1 – Зависимость смещения от времени
для затухающих колебаний.

Рисунок
21.2 – Зависимости амплитуды от времени
для затухающих колебаний
Характеристики
затухающих колебаний.
1.
Коэффициент затухания
β.
Изменение амплитуды
затухающих колебаний происходит по
экспоненциальному закону:
![]() .
.
Пусть за
время τ
амплитуда колебаний уменьшится в “e
” раз (“е” – основание натурального
логарифма, е ≈ 2,718). Тогда, с одной стороны,
 ,
,
а с другой стороны, расписав амплитуды
Азат.(t)
и Азат.(t+τ),
имеем
 .
.
Из этих соотношений следует βτ
= 1, отсюда
![]() .
.
Промежуток
времени τ,
за который амплитуда уменьшается в “е”
раз, называется временем релаксации.
Коэффициент
затухания β
– величина, обратно пропорциональная
времени релаксации.
2.
Логарифмический
декремент затухания δ
—
физическая величина, численно равная
натуральному логарифму отношения двух
последовательных амплитуд, отстоящих
по времени на период .


Если
затухание невелико, т.е. величина β
мала, то амплитуда незначительно
изменяется за период, и логарифмический
декремент можно определить так:
 ,
,
где
Азат.(t)
и Азат.(t+NT)
– амплитуды колебаний в момент времени
е и через N
периодов, т.е.в момент времени (t
+ NT).
3.
Добротность Q
колебательной системы
– безразмерная физическая величина,
равная произведению величины (2π)
νа
отношение энергии W(t)
системы в произвольный момент времени
к убыли энергии за один период затухающих
колебаний:
 .
.
Так как энергия
пропорциональна квадрату амплитуды,
то
 .
.
При малых
значениях логарифмического декремента
δ
добротность колебательной системы
равна
![]() ,
,
где Ne
– число колебаний, за которое амплитуда
уменьшается в “е” раз.
Так,
добротность пружинного маятника —
 .Чем
.Чем
больше добротность колебательной
системы, тем меньше затухание, тем дольше
будет длиться периодический процесс в
такой системе. Добротность
колебательной системы — безразмерная
величина, которая характеризует
диссипацию энергии во времени.
4. При
увеличении коэффициента β,
частота затухающих колебаний уменьшается,
а период увеличивается. При ω0
= β
частота затухающих колебаний становится
равной нулю ωзат.
= 0, а Тзат.
=
∞. При этом колебания теряют периодический
характер и называются апериодическими.
При ω0
= β
параметры системы, ответственные за
убывание колебательной энергии, принимают
значения, называемые критическими.
Для пружинного маятника условие ω0
= β
запишется так: ,
,
откуда найдем величину критического
коэффициента сопротивления:
![]() .
.

Рис. 21.3.
Зависимсть амплитуды апериодических
колебаний от времени
Вынужденные
колебания.
Все реальные колебания
являются затухающими. Чтобы реальные
колебания происходили достаточно долго
нужно периодически пополнять энергию
колебательной системы, действуя на нее
внешней периодически изменяющейся
силой
Рассмотрим
явление колебаний, если внешняя
(вынуждающая)
сила изменяется в зависимости от времени
по гармоническому закону. При этом в
системах возникнут колебания, характер
которых в той или иной мере повторит
характер вынуждающей силы. Такие
колебания называются вынужденными.
Общие признаки
вынужденных механических колебаний.
1. Рассмотрим
вынужденные механические колебаний
пружинного маятника, на который действует
внешняя (вынуждающая)
периодическая сила
![]() .
.
Силы, которые действуют на маятник,
однажды выведенный из положения
равновесия, развиваются в самой
колебательной системе. Это сила упругости
![]() и
и
сила сопротивления
![]() .
.
Закон
движения
(второй закон Ньютона) запишется следующим
образом:
 (21.6)
(21.6)
Разделим
обе части уравнения на m,
учтем, что
![]() ,
,
и получим дифференциальное
уравнение
вынужденных
колебаний:

Обозначим
![]() (β
(β
– коэффициент
затухания),
![]() (ω0
(ω0
– частота незатухающих свободных
колебаний),
![]() сила,
сила,
действующая на единицу массы. В этих
обозначениях дифференциальное
уравнение
вынужденных колебаний примет вид:
 (21.7)
(21.7)
Это дифференциальное
уравнение второго порядка с правой
частью, отличной от нуля. Решение такого
уравнения есть сумма двух решений
![]() .
.
![]() –
–
общее
решение однородного дифференциального
уравнения, т.е. дифференциального
уравнения без правой части, когда она
равна нулю. Такое решение нам известно
– это уравнение затухающих колебаний,
записанное с точностью до постоянной,
значение которой определяется начальными
условиями колебательной системы:
![]() ,
,
где
![]() .
.
Мы обсуждали ранее,
что решение может быть записано через
функции синуса.
Если
рассматривать процесс колебаний маятника
через достаточно большой промежуток
времени Δt
после включения вынуждающей силы
(Рисунок 21.2), то затухающие колебания в
системе практически прекратятся. И
тогда решением дифференциального
уравнения с правой частью будет решение
![]() .
.
Решение
![]() —
—
это частное решение неоднородного
дифференциального уравнения, т.е.
уравнения с правой частью. Из теории
дифференциальных уравнений известно,
что при правой части, изменяющейся по
гармоническому закону, решение
![]() будет
будет
гармонической функцией (sin
или cos)
с частотой изменения, соответствующей
частоте Ω
изменения правой части:
![]() , (21.8)
, (21.8)
где Аампл.
– амплитуда вынужденных колебаний, φ0
–сдвиг
фаз,
т.е. разность фаз между фазой вынуждающей
силы и фазой вынужденных колебаний. И
амплитуда Аампл.,
и сдвиг фаз φ0
зависят от параметров системы (β,
ω0)
и от частоты вынуждающей силы Ω.
Период
вынужденных колебаний равен
![]() (21.9)
(21.9)
График вынужденных
колебаний на Рисунке 4.1.

Рис.21.3. График
вынужденных колебаний
Установившиеся
вынужденные колебания являются так же
гармоническими.
Зависимости
амплитуды вынужденных колебаний и
сдвига фаз от частоты внешнего воздействия.
Резонанс.
1. Вернемся к
механической системе пружинного
маятника, на который действует внешняя
сила, изменяющаяся по гармоническому
закону. Для такой системы дифференциальное
уравнение и его решение соответственно
имеют вид:
 ,
,
![]() .
.
Проанализируем
зависимость амплитуды колебаний и
сдвига фаз от частоты внешней вынуждающей
силы, для этого найдем первую и вторую
производную от х и подставим в
дифференциальное уравнение.
![]() ,
,
 ,
,

Воспользуемся
методом векторной диаграммы. Из уравнения
видно, что сумма трех колебаний в левой
части уравнения (Рисунок 4.1) должна быть
равна колебанию в правой части. Векторная
диаграмма выполнена для произвольного
момента времени t.
Из нее можно определить
![]() .
.

Рисунок
21.4.
 , (21.10)
, (21.10)
 . (21.11)
. (21.11)
Учитывая
значение
![]() ,
,
![]() ,
,![]() ,
,
получим формулы для φ0
и Аампл.
механической системы:
 ,
,
 .
.
2. Исследуем
зависимость амплитуды вынужденных
колебаний от частоты вынуждающей силы
и величины силы сопротивления в
колеблющейся механической системе, по
этим данным построим график
![]() .
.
Результаты исследования отражены в
Рисунке 21.5, по ним видно, что при некоторой
частоте вынуждающей силы
![]() амплитуда
амплитуда
колебаний резко возрастает. И это
возрастание тем больше, чем меньше
коэффициент затухания β.
При
![]() амплитуда
амплитуда
колебаний становится бесконечно большой
![]() .
.
Явление
резкого возрастания амплитуды
вынужденных
колебаний при частоте вынуждающей силы,
равной
![]() ,
,
называется резонансом.
![]() (21.12)
(21.12)
Кривые
на Рисунке 21.5 отражают зависимость
![]() и
и
называются амплитудными
резонансными кривыми.

Рисунок
21.5 – Графики зависимости амплитуды
вынужденных колебаний от частоты
вынуждающей силы.
Амплитуда резогансных
колебаний примет вид:

(21.13)
Вынужденные
колебания – это незатухающие
колебания. Неизбежные потери энергии
на трение компенсируются подводом
энергии от внешнего источника периодически
действующей силы. Существуют системы,
в которых незатухающие колебания
возникают не за счет периодического
внешнего воздействия, а в результате
имеющейся у таких систем способности
самой регулировать поступление энергии
от постоянного источника. Такие системы
называются автоколебательными,
а процесс незатухающих колебаний в
таких системах – автоколебаниями.
В автоколебательной
системе можно выделить три характерных
элемента – колебательная система,
источник энергии и устройство обратной
связи между колебательной системой и
источником. В качестве колебательной
системы может быть использована любая
механическая система, способная совершать
собственные затухающие колебания
(например, маятник настенных часов).
Источником
энергии может служить энергия деформация
пружины или потенциальная энергия груза
в поле тяжести. Устройство обратной
связи представляет собой некоторый
механизм, с помощью которого
автоколебательная система регулирует
поступление энергии от источника. На
рис. 21.6 изображена схема взаимодействия
различных элементов автоколебательной
системы.
|
|
|
Рисунок |
 3
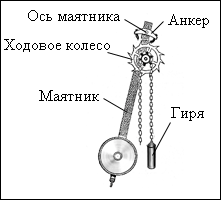
3Примером
механической автоколебательной системы
может служить часовой механизм с анкерным
ходом (рис. 21.7.). Ходовое колесо с косыми
зубьями жестко скреплено с зубчатым
барабаном, через который перекинута
цепочка с гирей. На верхнем конце маятника
закреплен анкер (якорек) с двумя
пластинками из твердого материала,
изогнутыми по дуге окружности с центром
на оси маятника. В ручных часах гиря
заменяется пружиной, а маятник –
балансиром – маховичком, скрепленным
со спиральной пружиной.
|
|
|
Рисунок |
Балансир совершает
крутильные колебания вокруг своей оси.
Колебательной системой в часах является
маятник или балансир. Источником энергии
– поднятая вверх гиря или заведенная
пружина. Устройством, с помощью которого
осуществляется обратная связь, является
анкер, позволяющий ходовому колесу
повернуться на один зубец за один
полупериод.
Обратная связь
осуществляется взаимодействием анкера
с ходовым колесом. При каждом колебании
маятника зубец ходового колеса толкает
анкерную вилку в направлении движения
маятника, передавая ему некоторую порцию
энергии, которая компенсирует потери
энергии на трение. Таким образом,
потенциальная энергия гири (или
закрученной пружины) постепенно,
отдельными порциями передается маятнику.
Механические
автоколебательные системы широко
распространены в окружающей нас жизни
и в технике. Автоколебания совершают
паровые машины, двигатели внутреннего
сгорания, электрические звонки, струны
смычковых музыкальных инструментов,
воздушные столбы в трубах духовых
инструментов, голосовые связки при
разговоре или пении и т. д.
13
Соседние файлы в папке физика лекцыи
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Уравнение затухающих колебаний
Затухание колебаний
Свободные колебания в реальных условиях не могут продолжаться вечно. Для механических систем всегда имеет место сопротивление среды, вследствие чего энергия движения объекта рассеивается при трении. В электромагнитных контурах колебания затухают за счет сопротивления проводников.
Уравнение затухающих колебаний
Уравнение затухающих колебаний описывает движение реальных колебательных систем. В дифференциальной форме оно записывается следующим образом:
![[frac{partial^2 x}{partial t^2} +2beta frac{partial x}{partial t} +omega_0^2 x=0]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-025c3ab74212aaf456b7f033ad4922d9_l3.png "Rendered by QuickLaTeX.com")
Из этого выражения можно получить еще одну каноническую форму:
![[x=Ae^{-beta t} cos (omega t +varphi_0 )]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-aed612bae577852aa1b11646b6cb51f2_l3.png "Rendered by QuickLaTeX.com")
либо 
Здесь x и t – координаты пространства и времени, А – первоначальная амплитуда.  – коэффициент затухания, который зависит от сопротивления среды r и массы колеблющегося объекта m:
– коэффициент затухания, который зависит от сопротивления среды r и массы колеблющегося объекта m:
![[beta = frac{r}{2m} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3ae054e2f8532577b7980d9526435491_l3.png "Rendered by QuickLaTeX.com")
Чем больше сопротивление среды, тем больше энергии рассеивается при вязком трении. И наоборот – чем больше масса (а значит, инерционность) тела, тем дольше оно будет продолжать движение.
Циклическая частота свободных колебаний (такой же системы, но без трения)  учитывает силу упругости в системе (например, жесткость пружины k):
учитывает силу упругости в системе (например, жесткость пружины k):
![[omega_0 =frac{k}{m} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-fc0978b4cd2f68e8618e7881ab644533_l3.png "Rendered by QuickLaTeX.com")
Строго говоря, в случае затухающих колебаний нельзя говорить про период – время между повторяющимися движениями системы постоянно увеличивается. Однако если колебания затухают медленно, для них с достаточной точностью можно определить период Т:
![[T=frac{2pi}{sqrt{omega_0^2 -beta^2}} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-5b45546f9a3738923adb8d809c7a41ab_l3.png "Rendered by QuickLaTeX.com")
Циклическая частота затухающих колебаний
Еще одна характеристика затухающих колебаний – циклическая частота:
![[omega =sqrt{omega_0^2 -beta^2} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-cedd6e8a399ee62b1bdd7487d7251271_l3.png "Rendered by QuickLaTeX.com")
Время релаксации – это коэффициент, показывающий, за какое время амплитуда колебаний уменьшится в е раз:
![[tau = frac{1}{beta} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-1de394d3c596fb7f3a09239697568c40_l3.png "Rendered by QuickLaTeX.com")
Отношение амплитуды изменяющейся величины в двух последовательных периодах называют декрементом затухания:
![[D= frac{A(t)}{A(t+T)} =e^{beta T} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-352471658c0470349e0281b87ec9ad5b_l3.png "Rendered by QuickLaTeX.com")
Эту же характеристику при расчетах часто представляют в виде логарифма:
![[lambda =lnD=beta T]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-6517c3a62d5f257da175c0809a103dc5_l3.png "Rendered by QuickLaTeX.com")
Добротность Q характеризует, насколько силы упругости системы превышают силы сопротивления среды, препятствуя диссипации энергии:
![[Q= frac{sqrt{mk}}{r} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-949034f5443a0373a420745136f3d039_l3.png "Rendered by QuickLaTeX.com")
Примеры решения задач
Собственная частота затухающих колебаний, формула
В любой колебательной системе затухание приводит к уменьшению частоты и соответственно увеличению периода колебаний.
Если
| ωзат | угловая частота затухающих колебаний, | радиан/сек |
|---|---|---|
| ω0 | угловая частота незатухающих колебаний, | радиан/сек |
| δ | коэффициент затухания, | радиан/сек |
то выражение отклонения будет решением дифференциального уравнения затухающих колебаний только при условии
[
ω_{зат} = sqrt{ ω_{0}^2 — δ^2 }
]
Вычислить, найти собственную частоту затухающих колебаний по формуле (1)
Собственная частота затухающих колебаний |
стр. 553 |
|---|