Формула частоты колебаний пружинного маятника в физике
Формула частоты колебаний пружинного маятника
Частота колебаний
Определение
Частота колебаний ($nu$) является одним из параметров, которые характеризуют колебания Это величина обратная периоду колебаний ($T$):
[nu =frac{1}{T}left(1right).]
Таким образом, частотой колебаний называют физическую величину, равную числу повторений колебаний за единицу времени.
[nu =frac{N}{Delta t}left(2right),]
где $N$ — число полных колебательных движений; $Delta t$ — время, за которые произошли данные колебания.
Циклическая частота колебаний (${omega }_0$) связана с частотой $nu $ формулой:
[nu =frac{{omega }_0}{2pi }left(3right).]
Единицей измерения частоты в Международной системе единиц (СИ) является герц или обратная секунда:
[left[nu right]=с^{-1}=Гц.]
Пружинный маятник
Определение
Пружинным маятником называют систему, которая состоит из упругой пружины, к которой прикреплен груз.
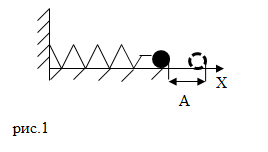
Допустим, что масса груза равна $m$, коэффициент упругости пружины $k$. Масса пружины в таком маятнике обычно не учитывается. Если рассматривать горизонтальные движения груза (рис.1), то он движется под действием силы упругости, если систему вывели из состояния равновесия и предоставили самой себе. При этом часто считают, что силы трения можно не учитывать.
Уравнения колебаний пружинного маятника
Пружинный маятник, который совершает свободные колебания — это пример гармонического осциллятора. Пусть он выполняет колебания вдоль оси X. Если колебания малые, выполняется закон Гука, то уравнение движения груза запишем как:
[ddot{x}+{omega }^2_0x=0left(4right),]
где ${omega }^2_0=frac{k}{m}$ — циклическая частота колебаний пружинного маятника. Решение уравнения (4) это функция синуса или косинуса вида:
[x=A{cos left({omega }_0t+varphi right)=A{sin left({omega }_0t+{varphi }_1right) } }left(5right),]
где ${omega }_0=sqrt{frac{k}{m}}>0$- циклическая частота колебаний пружинного маятника, $A$ — амплитуда колебаний; ${(omega }_0t+varphi )$ — фаза колебаний; $varphi $ и ${varphi }_1$ — начальные фазы колебаний.
Частота колебаний пружинного маятника
Из формулы (3) и ${omega }_0=sqrt{frac{k}{m}}$, следует, что частота колебаний пружинного маятника равна:
[nu =frac{1}{2pi }sqrt{frac{k}{m}} left(6right).]
Формула (6) справедлива в случае, если:
- пружина в маятнике считается невесомой;
- груз, прикрепленный к пружине, является абсолютно твердым телом;
- крутильные колебания отсутствуют.
Выражение (6) показывает, что частота колебаний пружинного маятника увеличивается с уменьшением массы груза и увеличением коэффициента упругости пружины. Частота колебаний пружинного маятника не зависит от амплитуды. Если колебания не являются малыми, сила упругости пружины не подчиняется закону Гука, то появляется зависимость частоты колебаний от амплитуды.
Примеры задач с решением
Пример 1
Задание. Период колебаний пружинного маятника составляет $T=5cdot {10}^{-3}с$. Чему равна частота колебаний в этом случае? Какова циклическая частота колебаний этого груза?
Решение. Частота колебаний — это величина обратная периоду колебаний, следовательно, для решения задачи достаточно воспользоваться формулой:
[nu =frac{1}{T}left(1.1right).]
Вычислим искомую частоту:
[nu =frac{1}{5cdot {10}^{-3}}=200 left(Гцright).]
Циклическая частота связана с частотой $nu $ как:
[{omega }_0=2pi nu left(1.2right).]
Вычислим циклическую частоту:
[{omega }_0=2pi cdot 200approx 1256 left(frac{рад}{с}right).]
Ответ. $1) nu =200$ Гц. 2) ${omega }_0=1256 frac{рад}{с}$
Пример 2
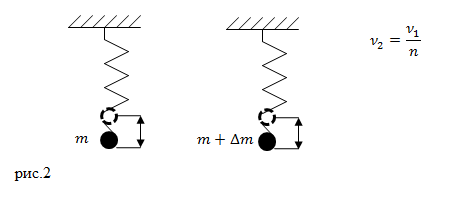
Задание. Массу груза, висящего на упругой пружине (рис.2), увеличивают на величину $Delta m$, при этом частота уменьшается в $n$ раз. Какова масса первого груза?
Решение. Будем считать, что грузы на пружине совершают свободные гармонические колебания, тогда за основу решения задачи примем формулу:
[nu =frac{1}{2pi }sqrt{frac{k}{m}} left(2.1right).]
Для первого груза частота будет равна:
[{nu }_1=frac{1}{2pi }sqrt{frac{k}{m}} left(2.2right).]
Для второго груза:
[{nu }_2=frac{1}{2pi }sqrt{frac{k}{m+Delta m}} left(2.2right).]
По условию задачи ${nu }_2=frac{{nu }_1}{n}$, найдем отношение $frac{{nu }_1}{{nu }_2}:frac{{nu }_1}{{nu }_2}=sqrt{frac{k}{m}cdot frac{m+Delta m}{k}}=sqrt{1+frac{Delta m}{m}}=n left(2.3right).$
Получим из уравнения (2.3) искомую массу груза. Для этого обе части выражения (2.3) возведем в квадрат и выразим $m$:
[1+frac{Delta m}{m}=n^2to frac{Delta m}{m}=n^2-1to m=frac{Delta m}{n^2-1}.]
Ответ. $m=frac{Delta m}{n^2-1}$
Читать дальше: формула частоты.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Андрей Геннадьевич Блохин
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Свойства пружинного маятника
Определение 1
Идеальный пружинный маятник представляет собой пружину, массой которой можно пренебречь, с закрепленным на ней телом с точечной массой. При этом один или оба конца пружины закреплены, а силой трения можно пренебречь.
Такую конструкцию можно рассматривать лишь как математическую модель. Примерами реальных пружинных маятников (навитых из упругой проволоки цилиндрических спиралей) могут служить всевозможные устройства, гасящие колебания: амортизаторы, подвески, рессоры и т.п. Пружинные маятники, хотя и несколько иной конструкции (в виде плоских спиралей) используются в механических часах.
Свойства пружин зависят от вещества, из которого они изготовлены (как правило, это особая пружинная сталь), диаметра проволоки, формы ее сечения, диаметра цилиндра пружины, его длины. Эти показатели в совокупности обуславливают ключевую характеристику пружины — ее жесткость.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
Пружина запасает энергию при продольном растяжении или сжатии за счет упругих деформаций в кристаллической решетке своего вещества.
Замечание 1
При слишком сильном растяжении или сжатии материал пружины теряет упругие свойства. Такая деформация называется пластической или остаточной.
Формула для расчета частоты колебаний
Если пружину с закрепленной на ней грузом, подвергнуть продольной упругой деформации, а затем отпустить, она начнет совершать возвратно-поступательные гармонические колебания, в ходе которых перемещение закрепленного на ней груза описывается формулой:
$x = A cdot cos(omega_0 cdot t + phi)$
Здесь $A$ — амплитуда колебаний, $phi$ — начальная фаза, $omega_0$ — собственная циклическая частота колебаний пружинного маятника, рассчитываемая как
$omega_0 = sqrt{frac{k}{m}}$ > $0$,
где:
- $k$ — жесткость пружины,
- $m$ — масса закрепленного на ней тела.
Циклическая частота отличается тем, что характеризует не количество полных циклов за единицу времени, а количество «пройденных» колеблющейся по гармоническому закону точкой радиан.
Период колебаний пружинного маятника вычисляется как
$T = 2 cdot pi cdot sqrt{frac{m}{k}}$.
Пример 1
Найти частоту и циклическую частоту пружинного маятника, период колебаний которого составляет 0,1 с.
Частоту можно найти как величину обратную к периоду:
$f = frac{1}{T}$
$f = frac{1}{0,1} = 10 Гц$
Циклическую частоту можно выразить как
$omega_0 = 2 cdot pi cdot f$
$omega_0 = 2 cdot 3,1415927 cdot 10 approx 62,831854 frac{рад}{с}$
Ответ: 10 герц и $approx$ 62,831854 радиан в секунду.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме

В этой главе …
- Изучаем закон Гука
- Осваиваем основы простого гармонического движения
- Изучаем особенности простого гармонического движения
- Измеряем энергию простого гармонического движения
- Вычисляем период колебаний маятника
Эта глава посвящена описанию еще одного типа движения, а именно: описанию периодического движения. Примерами такого движения являются колебания грузика на пружинке, качания маятника и даже прыжки с высоты с помощью эластичной веревки. В этой главе рассматриваются закономерности и особенности таких повторяющихся, т.е. периодических движений. Здесь мы научимся вычислять характеристики периодического движения: период колебаний пружинки и маятника, упругую энергию сжатой пружины и т.д.
Содержание
- Постигаем закон Гука
- Растягиваем и сжимаем пружины
- Изучаем особенности закона Гука
- Движется дальше: простое гармоническое движение
- Изучаем простое гармоническое движение по горизонтали и по вертикали
- Изучаем свойства простого гармонического движения
- Изучаем траекторию простого гармонического движения
- Определяем период простого гармонического движения
- Определяем скорость в простом гармоническом движении
- Определяем ускорение в простом гармоническом движении
- Определяем частоту колебаний груза на пружине
- Вычисляем энергию простого гармонического движения
- Качаемся вместе с маятником
Постигаем закон Гука
Все объекты природы могут деформироваться, т.е. менять свою форму или объем, под действием приложенной силы. Если такие деформации (т.е. изменения) исчезают после прекращения действия приложенной силы, то они называются упругими. Упругость играет важную роль в технике. Упругие пружины используются для гашения удара при посадке космического корабля на поверхность планеты. Свернутые в спираль упругие пластины применяются в заводных механизмах часов. Даже в мышеловке используется упругая деформация пружины.
Еще в XVII-M веке английский физик Роберт Гук, изучая упругие свойства разных материалов, вывел закон, названный его именем. Согласно закону Гука, для упругого деформирования материала требуется приложить силу, величина которой прямо пропорциональна его деформации. Например, чтобы растянуть пружину на величину ( x ), потребуется приложить внешнюю силу ( F_{вн} ), которая равна:

где ( k ) — это коэффициент пропорциональности.
Точнее говоря, вектор деформации ( mathbf{x} ) всегда направлен противоположно силе сопротивления пружины (или силе упругости) ( mathbf{F} ), а потому в векторную формулировку закона Гука обычно входит знак “минус”:

Растягиваем и сжимаем пружины
Следует помнить, что закон Гука относится только к упруго деформируемым материалам.
В реальном мире, помимо упругих деформаций, имеются еще и пластические деформации. Так называют деформации, которые остаются в объекте, хотя бы частично, даже после прекращения действия внешних сил. Если сила не превосходит некоторой известной величины, которая называется пределом упругости, то возникающая деформация будет пластической. Предел упругости имеет разные значения для разных материалов. Если деформируемый объект, например пружина, испытывает только упругие деформации, то его называют идеально упругим, например, идеально упругой пружиной. Коэффициент пропорциональности ( k ) в законе Гука ( F=kx ) называется коэффициентом упругости объекта, который зависит от материала объекта, его размеров и измеряется в Н/м.
Допустим, вам нужно спроектировать подвеску автомобиля массой 1000 кг, состоящую из 4 пружин, которые могут идеально упруго деформироваться на расстояние 0,5 м. Каким коэффициентом упругости должна обладать пружина, чтобы выдержать вес автомобиля?
Вес автомобиля равен ( mg ), где ( g ) — это ускорение свободного падения под действием силы гравитационного притяжения. Это значит, что на каждую пружину приходится вчетверо меньшая нагрузка ( mg/4 ).
Определим упругую деформацию пружины под действием этой нагрузки по формуле закона Гука:

т.е. коэффициент упругости равен:

Подставляя значения, получим:

Итак, чтобы выдержать вес автомобиля, потребуется пружина с коэффициентом упругости равным 4,9·103 Н/м. Не забудьте, что каждый элемент подвески автомобиля должен обладать определенным запасом прочности, чтобы выдерживать непредсказуемые превышения нагрузки, например на ухабах. Однако эта задача выходит за рамки данного курса.
Изучаем особенности закона Гука
Как уже упоминалось выше, в векторную формулировку закона Гука обычно входит знак “минус”:

Таким образом, знак “минус” выражает следующую особенность упругой деформации: сила упругости всегда противоположна деформации. На рис. 12.1 схематически показаны направления силы упругости и деформации при сжатии и растяжении пружины.
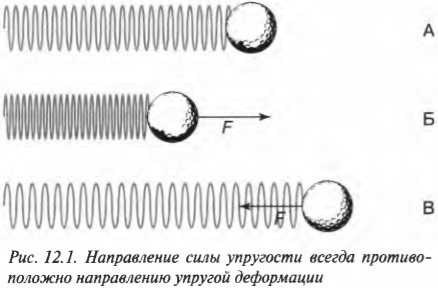
Как видите, при отсутствии растяжении или сжатия нет и деформации (см. схему А на рис. 12.1). Если пружина сжимается влево, то сила упругости направлена вправо (см. схему Б на рис. 12.1), а если пружина растягивается вправо, то сила упругости направлена влево (см. схему В на рис. 12.1).
Сила упругости пружины не зря называется силой сопротивления, ведь она стремится установить равновесие.
Движется дальше: простое гармоническое движение
Простым гармоническим движением называется такое движение, при котором сила сопротивления движению пропорциональна перемещению. При этом сила трения не учитывается, и никакие другие внешние силы не оказывают никакого влияния на движение. Такое движение будет выполняться периодически и бесконечно долго. Конечно же, в реальной ситуации так не бывает, но здесь имеется в виду именно идеализированная ситуация.
Изучаем простое гармоническое движение по горизонтали и по вертикали
На рис. 12.1 показан пример движения мячика, прикрепленного к пружине. При сжатии пружины внешней силой справа налево в пружине возникает сила упругости, которая стремится вернуть мячик в исходное положение. После возврата мячика в исходное положение он останавливается не сразу, а спустя какое-то время. Оно необходимо для торможения ускорившегося мячика с помощью силы упругости, возникающей при растягивании вправо. Дело в том, что мячик обладает некоторой массой, и инерция (см. главу 11) не позволяет ему остановиться мгновенно. В результате имеем следующую последовательность событий (см. рис. 12.1).
- Схема А. Мячик находится в состоянии равновесия. Никакие силы не действуют на него. Пружина находится в нерастянутом и в несжатом состоянии.
- Схема Б. Внешняя сила сжала пружину справа налево. В пружине возникла упругая сила сопротивления ( F ).
- Схема В. Внешняя сила отпускает пружину (и далее не участвует в процессе движения). Упругая сила сопротивления пружины ( F ) стремится распрямить пружину, т.е. вернуть мячик в исходное состояние. Мячик начинает ускоренное движение.
Когда мячик проходит точку исходного положения, его скорость становится очень большой (фактически максимальной) и он продолжает движение вправо. При этом возникает деформация растяжения и соответственно направленная противоположно упругая сила сопротивления пружины. Именно так и происходит при повторяющихся движениях мячика слева направо и, наоборот, справа налево. После первоначального толчка из неподвижного состояния мячик начинает совершать периодические колебания из самого крайнего левого положения в самое крайнее правое положение.
В примере на рис. 12.1 предполагается, что силы трения нет. А что будет, если пружинку с мячиком подвесить вертикально, как показано на рис. 12.2?
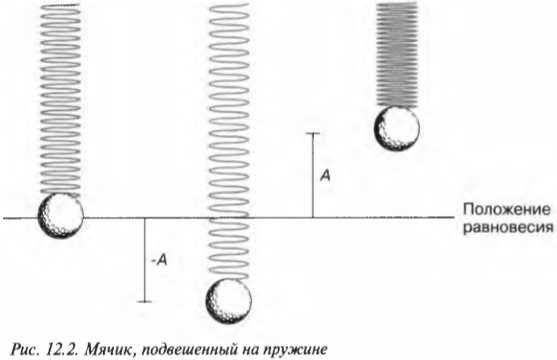
В подвешенном состоянии изменится положение равновесия, но после воздействия внешней силы мячик будет совершать аналогичные периодические движения, но теперь уже вверх-вниз.
Это новое равновесное положение определяется равенством веса мячика ( mg ) и силы упругости ( ky_0 ) растянутой пружины под действием этого веса:

Итак, новое положение исходного равновесия будет определяться формулой:

Теперь если потянуть мячик вниз с помощью внешней силы и отпустить мячик, то он начнет совершать периодическое движение, как и в прежнем примере (см. рис. 12.1), но теперь уже относительно нового положения равновесия.
Периодическое движение подобного рода называется периодическим колебанием, а крайние положения мячика при таком периодическом движении мячика называются амплитудами периодических колебаний. Амплитуда является важным элементом математического описания простого гармонического движения.
Изучаем свойства простого гармонического движения
Представьте себе, что для изучения простого гармонического движения ученые решили освещенный фонариком мячик из предыдущего примера заснять на движущуюся по горизонтали фотопленку.
После проявки фотопленки на ней оказался четкий волнообразный след, который показан на рис. 12.3.
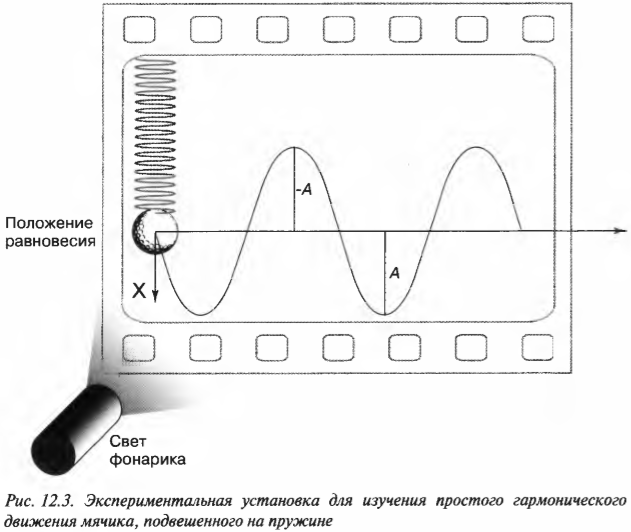
Оказывается, мячик действительно совершает периодические движения вверх-вниз относительно исходного равновесного положения с амплитудой А. Вблизи точки равновесия скорость мячика максимальна, а в точках амплитуды минимальна.
Траектория мячика очень похожа на синусоидальную кривую, т.е. след мячика на движущейся фотопленке описывается графиком функции ( sin ) (“синус”) либо ( cos ) (“косинус”) со сдвигом от начала координат. Действительно, решением уравнения простого гармонического движения является функция ( sin ) или ( cos ).
Изучаем траекторию простого гармонического движения
Построим и рассмотрим внимательно кривую функции:

Наверняка эта функция и ее графическое представление в виде синусоидальной кривой уже знакомо многим читателям этой книги из курса математики. Ее часто можно встретить на экранах разных приборов в реальной жизни или даже в виртуальном мире кино и компьютерных игр.
Пусть освещенный фонариком мячик движется по окружности перпендикулярной плоскости страницы и снимается на движущуюся по горизонтали фотопленку. Тогда после проявки фотопленки на ней снова появится синусоидальная кривая, как показано на рис. 12.4.
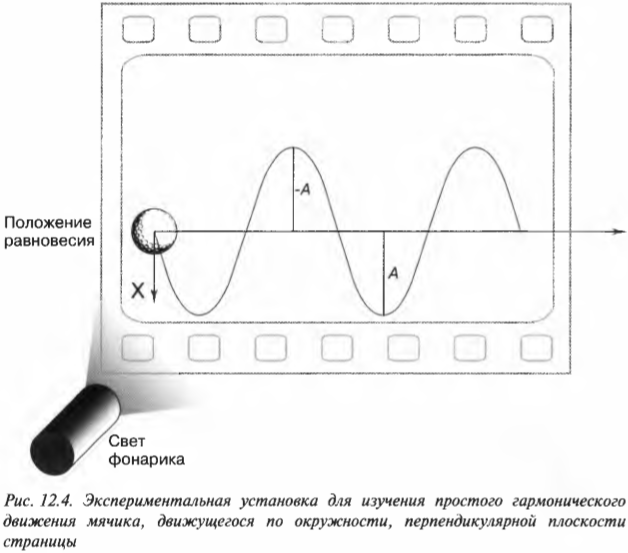
Если расположить окружность так, чтобы она была параллельна плоскости страницы (рис. 12.5), то можно легко заметить, что положение мячика определяется формулой:

где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( theta ) — это угол поворота мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
Если мячик вращается по окружности с постоянной угловой скоростью, то ( theta=omega t ) и ( x=Acos(omega t) ).
Определяем период простого гармонического движения
Прохождение мячиком пути, равного длине окружности, называется циклом, а время его прохождения — периодом. Период обозначается символом ( T ) и измеряется в секундах.
На рис. 12.4 и 12.5 полный цикл соответствует движению мячика от исходного положения с амплитудой ( A ), затем к положению с амплитудой ( -A ), а потом снова к положению с амплитудой ( A ).
Как связан период с уже знакомыми нам параметрами движения? За один цикл мячик проходит угол величиной ( 2pi ) за период ( T ), т.е. его угловая скорость равна:


Откуда получаем выражение для периода:

Для характеристики периодического движения часто используют понятие частота, которое равно количеству циклов за единицу времени. Например, если мячик на рис. 12.4 совершает 1000 полных оборотов в секунду, то его частота равна 1000 с-1. В системе СИ частоту измеряют в герцах (или сокращенно Гц), т.е. 1 с-1 = 1 Гц. Таким образом, частота вращения мячика по окружности равна 1000 Гц.
Частота ( f ) и период ( T ) связаны очень простым соотношением:

Поскольку:

то теперь можно легко найти связь между частотой и угловой скоростью:
При описании периодических движений угловую скорость ( omega ) часто называют циклической частотой.
Определяем скорость в простом гармоническом движении
На рис. 12.5 мячик совершает движение по окружности, а координата перемещения по оси X определяется формулой:
где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( omega ) — это угловая скорость мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
В любой точке с координатой х мячик обладает некоторой скоростью, которая зависит от времени. Как выразить ее с помощью математической формулы?
Очень просто, ведь для этого достаточно вспомнить о связи между угловой ( omega ) и тангенциальной ( v ) скоростью (см. главу 10):

Поскольку в данном случае ( r=A ), то в итоге получим для тангенциальной скорости:

Теперь для определения скорости периодических колебаний следа мячика по оси X на фотопленке нужно вычислить проекцию тангенциальной скорости на ось X:

(Здесь знак “минус” возникает, поскольку фотопленка движется вниз и ось Y направлена вниз, а потому угол ( beta ) между вектором скорости и осью X равен ( 180^circ+theta ), a ( sin(beta)=sin(180^circ+theta )=-sin(theta) ). — Примеч. ред.)
После подстановки выражений для ( theta=omega t ) и для ( v=Aomega ) получим:

Обратите внимание, что скорость меняется от исходного положения с амплитудой перемещения ( A ) и амплитудой скорости ( 0 ), затем к положению с амплитудой перемещения ( 0 ) и амплитудой скорости ( -Aomega ), потом к положению с амплитудой перемещения ( -A ) и амплитудой скорости ( 0 ), затем к положению с амплитудой перемещения ( 0 ) и амплитудой скорости ( Aomega ), а потом снова к положению с амплитудой перемещения ( A ) и амплитудой скорости ( 0 ).
Как видите, в простом гармоническом движении амплитуда скорости ( A_v=Aomega ) связана с амплитудой перемещения ( A_х=A ) формулой:

Рассмотрим следующий простой пример. Представьте себе, что несколько отчаянных парней и девушек прыгают с высоты с помощью эластичной веревки. Известно, что при прыжке с некоторой высоты относительно точки равновесия максимальная скорость в точке равновесия одного из смельчаков достигает величины 4 м/с. Он решает в 10 раз увеличить высоту прыжка. Какой будет его максимальная скорость в точке равновесия?
Итак, амплитуда скорости в первом прыжке ( A_{v1}=-A_{х1}omega ) равна 4 м/с. Амплитуда перемещения во втором прыжке (с новой высоты) в 10 раз больше амплитуды перемещения в начале, т.е. ( A_{х2}=10A_{х1} ). Вопрос: чему равна амплитуда скорости ( A_{v2}=-A_{х2}omega ) во втором прыжке? Подставляя выражение для ( A_{х2}=-omega/A_{v1} ) в формулу ( A_{х2}=10A_{х1} ), а затем в формулу ( A_{v2}=-A_{х2}omega ), получим:

Итак, при увеличении амплитуды прыжка в 10 раз амплитуда скорости возрастает тоже в 10 раз, т.е. становится равной 40 м/с.
Определяем ускорение в простом гармоническом движении
Вернемся к примеру на рис. 12.5, где мячик совершает движение по окружности. Его координата перемещения по оси X определяется формулой:
где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( omega ) — это угловая скорость мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
Как мы уже выяснили в предыдущем разделе, его скорость перемещения по оси X определяется формулой:
Однако вращательное движение мячика также характеризуется центростремительным ускорением. Как выразить ее с помощью математической формулы?
Как известно (см. главу 10), угловая скорость ( omega ) центростремительное ускорение ( a ) связаны следующей формулой:

Поскольку в данном случае ( r=A ), то в итоге получим для центростремительного ускорения:

Теперь для определения ускорения периодических колебаний следа мячика по оси X на фотопленке нужно вычислить проекцию центростремительного ускорения на ось X:

(Здесь знак “минус” возникает, поскольку фотопленка движется вниз и ось Y направлена вниз, а потому угол ( gamma ) между вектором центростремительного ускорения и осью X равен ( 180^circ + theta ), a ( cos(gamma)=cos(180^circ + theta)=-cos(theta) ). — Примеч. ред.)
После подстановки выражений для ( theta=omega t ) и для ( a=Aomega^2 ) получим:

Как видите, в простом гармоническом движении амплитуда ускорения ( A_а=Aomega^2 ) связана с амплитудой перемещения ( A_х=A ) формулой:

Рассмотрим еще один простой пример. Пусть диафрагма (тоненькая пластинка) в трубке домашнего телефона совершает простое гармоническое движение с частотой ( theta=omega t ) величиной 1 кГц (т.е. 1000 Гц) и амплитудой перемещения ( A_х=A ) величиной 1,0·10-4 м. Чему равна амплитуда ускорения мембраны ( A_а )?
Поскольку ( omega=2pi!f ), то после подстановки этого выражения в предыдущую формулу ( A_а=-A_хomega^2 ) получим:

Подставляя численные значения, получим:

Как видите, мембрана обычного телефона испытывает очень большое ускорение, которое почти в 400 раз больше ускорения свободного падения ( g ) = 9,8 м/с2 под действием гравитационного притяжения Земли.
Определяем частоту колебаний груза на пружине
С математической точки зрения колебания груза на пружине и движение мячика по окружности (см. предыдущие разделы этой главы) принципиально не отличаются. Дело в том, что оба эти движения являются простыми гармоничными. Поэтому их основные характеристики (например, скорость, ускорение, частота и период колебаний) должны описываться аналогичными математическими формулами. Остановимся и подробно проследим за этой аналогией.
Как известно, согласно закону Гука (см. выше в этой главе), при растяжении пружины на величину ( x ) возникает упругая сила ( F ), которая равна:

где ( k ) — это коэффициент пропорциональности.
Согласно закону Ньютона (см. главу 5), сила и вызванное ею ускорение ( a ) связаны следующим соотношением:

откуда получаем:

Из предыдущего раздела нам уже известно, что в простом гармоническом движении перемещение и ускорение выражаются следующими формулами:
и
Подставляя эти выражения в предыдущую формулу, полученную на основе законов Гука и Ньютона, получим:

Сокращая некоторые переменные, получим:

Откуда легко можно выразить циклическую частоту:

Поскольку ( omega=2pi!f ) и ( omega=2pi/T ), то после подстановки предыдущего выражения в эти формулы получим:

и

Пусть пружина на рис. 12.1 обладает коэффициентом упругости ( k ), равным 1,0·10-2 Н/м, а к ней прикреплен груз массой 4 г. Чему будет равен период колебаний груза на пружине? Подставляя значения в предыдущую формулу для периода, получим:

А какова частота этих колебаний? Снова подставляя значения в предыдущую формулу для частоты, получим:

Используя формулы перемещения, скорости и ускорения для простого гармонического движения (см. ранее в этой главе):
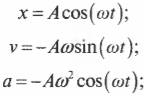
можно вычислить координату, скорость и ускорение груза на пружине в произвольный момент времени. Как будут выглядеть эти формулы для задачи с грузиком на пружине?
Сначала вычислим циклическую частоту:
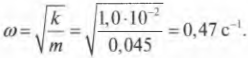
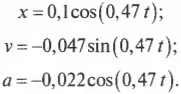
Если амплитуда ( A ) равна 10 см, то получим:
Вычисляем энергию простого гармонического движения
В простом гармоническом движении периодически происходит увеличение и уменьшение кинетической энергии, например груза на пружине. Ясно, что кинетическая энергия груза не пропадает, а преобразуется в энергию сжатой или растянутой пружины. Эта энергия называется упругой потенциальной энергией пружины. Сколько энергии запасено в сжатой или растянутой пружине?
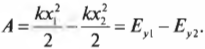
Попробуем вычислить ее с помощью простых соображений. Как известно, работа ( A ) силы ( F ) при перемещении на расстояние ( s ) равна:

При сжатии или растяжении пружины сила ( F ) меняется линейно с расстоянием, поэтому работу этой силы по сжатию или растяжению пружины на расстояние ( s ) можно представить как произведение средней силы ( overline{F} ) на перемещение ( s ):

Средняя ( overline{F} ) сила определяется как:

где ( F_1=-kx_1 ) — это сила упругости в точке с координатой ( x_1 ), a ( F_2=-kx_2 ) — сила упругости в точке с координатой ( x_2 ). При этом перемещение ( s ) будет равно:

Подставляя выражения для ( s ) и ( overline{F} ) в формулу работы, получим:

Члены ( frac{kx^2_1}{2} ) и ( frac{kx^2_2}{2} ) выражают упругую потенциальную энергию пружины ( E_{у1} ) и ( E_{у2} ) в точках с координатами ( x_1 ) и ( x_2 ), соответственно. Таким образом, работа силы упругости равна изменению упругой потенциальной энергии пружины:
Рассмотрим простой пример. Насколько возрастет упругая потенциальная энергия пружины с коэффициентом упругости 1,0·10-2 Н/м при сжатии ее на 10 см? Подставляя значения в формулу

получим:

Учтите, что при изменении упругой потенциальной пружины с грузом (при отсутствии внешних сил) изменяется кинетическая энергия груза. Причем эти изменения происходят так, что неизменной остается полная энергия системы, состоящей из пружины и груза. Например, при достижении точки равновесия пружина полностью разжимается, и ее упругая потенциальная энергия становится равной нулю, а кинетическая энергия груза при этом становится максимальной. И наоборот, при максимальном сжатии или растяжении пружины ее упругая потенциальная энергия становится максимальной, а кинетическая энергия груза при этом становится равной нулю.
Качаемся вместе с маятником
Еще одним типичным примером простого гармонического движения (кроме груза на пружине) является простой маятник, который показан на рис. 12.6.
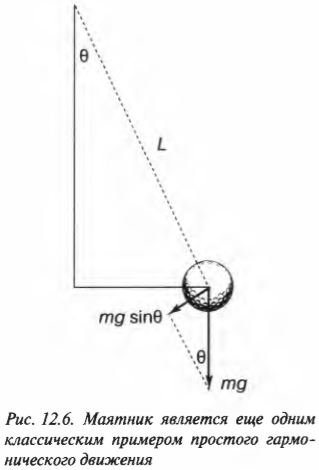
Можно ли движение маятника описать математическими формулами простого гармонического движения, которые (выше в этой главе) использовались для описания движения груза на пружине? Да, и вот почему.
Дело в том, что на маятник, подвешенный на нити длиной ( L ) и отклоненный на угол ( theta ), действует сила гравитационного притяжения ( mathbf{F}=mmathbf{g} ). Перпендикулярная нити компонента силы создает сопротивление движению:

Момент этой компоненты силы

определяет угловое ускорение маятника ( alpha ):

Отсюда получаем формулу математического маятника:
(Математическим маятником называется идеализированная система, состоящая из невесомой и нерастяжимой нити, на которой подвешен груз с массой, сосредоточенной в одной точке. — Примеч. ред.)
При малых колебаниях, т.е. при малых значениях угла ( theta ); можно считать, что ( sin(theta)approxtheta ), и тогда прежняя формула приобретает следующий вид:

Эта формула связи ускорения и перемещения объекта очень похожа на прежние формулы простого гармонического движения груза на пружине и мячика по окружности (см. ранее в этой главе). Но прежде в эту формулу входило линейное перемещение, а теперь — угловое.
По аналогии с прежними формулами связи ускорения и перемещения объекта, совершающего простое гармоническое движение, коэффициент пропорциональности между ускорением и перемещением ( g/L ) равен квадрату циклической частоты ( omega^2 ). Отсюда получаем, что:

Далее, поскольку ( omega=2pi!f ) и ( omega=2pi/T ), то после подстановки предыдущего выражения в эти формулы получим:

и

Обратите внимание, что период качаний математического маятника не зависит от его массы!
Глава 12. Сжимаем пружины: простое гармоническое движение
3.4 (67.27%) 11 votes
Пружинный маятник — колебательная система, которая состоит из тела, подвешенного к пружине. Эта система способна к совершению свободных колебаний.
Подобные системы довольно широко распространены за счет своей функциональной гибкости. Механизмы на основе таких маятников часто используются как элементы средств автоматики.
В том числе они нашли применение в контактных взрывателях различных боеприпасов, в качестве акселерометров в контурах управления ракет. Так же они активно используются в предохранительных клапанах, устанавливаемых в трубопроводах.
Что такое пружинный маятник
Пружинным маятником в физике называют систему, совершающую колебательные движения под действием силы упругости.
Приняты следующие обозначения:
-
m — масса тела;
-
k — коэффициент жесткости пружины.
Общий вид маятника:

Особенностями пружинных маятников являются:
-
Сочетание тела и пружины. Массой пружины обычно в расчетах пренебрегают. Роль тела могут играть различные объекты. На них оказывают действие внешние силы. Груз может крепиться разными способами. Витки пружины, которыми она начинается и заканчивается, изготавливают с учетом повышенной нагрузки;
-
У любой пружины есть исходное положение, предел сжатия и растяжения. При максимальном сжатии зазора между витками нет. Когда она максимально растянута, возникает необратимая деформация;
-
Полная механическая энергия появляется с началом процесса обратимого деформирования. В этот момент на объект не оказывает действие сила упругости;
-
Колебательные движения происходят под влиянием силы упругости. Масштаб влияния определяется несколькими причинами (тип сплава, расположение витков и т. д.). Так как может происходить и сжатие и растяжение, можно сделать вывод, что сила упругости действует в двух противоположных направлениях;
-
От массы тела, величины и направления прикладываемой силы зависит скорость в плоскости его перемещения. Например, если подвесить груз к пружине и, растянув её, отпустить, то груз будет перемещаться в двух плоскостях: вертикально и горизонтально.
Виды пружинных маятников

Существует два типа данной системы:
-
Вертикальный маятник — на тело довольно сильно влияет сила тяжести. Это влияние обуславливает увеличение инерционных движений, которые совершает тело в исходной точке.
-
Горизонтальный — в таком варианте при движении на груз начинает действовать сила трения, возникающая по причине того, что груз лежит на поверхности.

Сила упругости в пружинном маятнике
До начала деформирования пружина находится в равновесном состоянии. Прикладываемое усилие может как растягивать, так и сжимать её.
Применяя к пружинному маятнику закон сохранения энергии, мы можем рассчитать силу упругости в нем. Упругость прямо пропорциональна расстоянию, на которое сместился груз.
Расчёт силы упругости может быть проведен таким образом:
Fупр = — k*x
где k — коэффициент жесткости пружины (Нм),
x – смещение (м).
Уравнения колебаний пружинного маятника
Свободные колебания пружинного маятника описываются с помощью гармонического закона.
Если допустить вероятность того, что колебания идут вдоль оси Х, и при этом выполняется закон Гука, то уравнение примет вид:
F(t) = ma(t) = — mw2x(t),
где w — радиальная частота гармонического колебания.
Для проведения расчета колебаний, учитывая все вероятности, применяют следующие формулы:

Период и частота свободных колебаний пружинного маятника
При разработке проектов всегда определяется период колебаний и их частота. Для их измерения используются известные в физике формулы.

Изменение циклической частоты покажет формула, приведенная на рисунке:

Факторы, от которых зависит частота:
-
Коэффициент упругости. На этот коэффициент влияет количество витков, их диаметр, расстояние между ними, длина пружины, жесткость используемого сплава и т. д.
-
Масса груза. От этого фактора зависит возникающая инерция и скорость перемещения.
Амплитуда и начальная фаза пружинного маятника
Учитывая начальные условия и рассчитав уравнение колебаний, можем точно описать колебания пружинного маятника.
В качестве начальных условий используются: амплитуда (А) и начальная фаза колебаний (ϕ).

Энергия пружинного маятника
При рассмотрении колебания тел учитывают, что груз движется прямолинейно. Полная механическая энергия тела в каждой точке траектории является константой и равняется сумме его потенциальной энергии и кинетической энергии.

Потенциальная энергия:

Кинетическая энергия:

Полная энергия:


Расчет имеет особенности. При его проведении нужно учитывать несколько условий:
-
Колебания проходят в двух плоскостях: вертикальной и горизонтальной.
-
В качестве равновесного положения выбирается ноль потенциальной энергии. Находясь в этом положении пружина сохраняет свою форму.
-
Влияние силы трения при расчете не учитывают.
Дифференциальное уравнение гармонических колебаний пружинного маятника

Отметим, что пружинный маятник — это обобщенное определение. Скорость движения груза (тела) напрямую зависит от комплекса условий, в том числе приложенного к нему усилия.
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023