The pulse repetition frequency (PRF) is the number of pulses of a repeating signal in a specific time unit. The term is used within a number of technical disciplines, notably radar.
In radar, a radio signal of a particular carrier frequency is turned on and off; the term «frequency» refers to the carrier, while the PRF refers to the number of switches. Both are measured in terms of cycle per second, or hertz. The PRF is normally much lower than the frequency. For instance, a typical World War II radar like the Type 7 GCI radar had a basic carrier frequency of 209 MHz (209 million cycles per second) and a PRF of 300 or 500 pulses per second. A related measure is the pulse width, the amount of time the transmitter is turned on during each pulse.
After producing a brief pulse of radio signal, the transmitter is turned off in order for the receiver units to hear the reflections of that signal off distant targets. Since the radio signal has to travel out to the target and back again, the required inter-pulse quiet period is a function of the radar’s desired range. Longer periods are required for longer range signals, requiring lower PRFs. Conversely, higher PRFs produce shorter maximum ranges, but broadcast more pulses, and thus radio energy, in a given time. This creates stronger reflections that make detection easier. Radar systems must balance these two competing requirements.
Using older electronics, PRFs were generally fixed to a specific value, or might be switched among a limited set of possible values. This gives each radar system a characteristic PRF, which can be used in electronic warfare to identify the type or class of a particular platform such as a ship or aircraft, or in some cases, a particular unit. Radar warning receivers in aircraft include a library of common PRFs which can identify not only the type of radar, but in some cases the mode of operation. This allowed pilots to be warned when an SA-2 SAM battery had «locked on», for instance. Modern radar systems are generally able to smoothly change their PRF, pulse width and carrier frequency, making identification much more difficult.
Sonar and lidar systems also have PRFs, as does any pulsed system. In the case of sonar, the term pulse repetition rate (PRR) is more common, although it refers to the same concept.
Introduction[edit]
Electromagnetic (e.g. radio or light) waves are conceptually pure single frequency phenomena while pulses may be mathematically thought of as composed of a number of pure frequencies that sum and nullify in interactions that create a pulse train of the specific amplitudes, PRRs, base frequencies, phase characteristics, et cetera (See Fourier Analysis). The first term (PRF) is more common in device technical literature (Electrical Engineering and some sciences), and the latter (PRR) more commonly used in military-aerospace terminology (especially United States armed forces terminologies) and equipment specifications such as training and technical manuals for radar and sonar systems.
The reciprocal of PRF (or PRR) is called the pulse repetition time (PRT), pulse repetition interval (PRI), or inter-pulse period (IPP), which is the elapsed time from the beginning of one pulse to the beginning of the next pulse. The IPP term is normally used when referring to the quantity of PRT periods to be processed digitally. Each PRT having a fixed number of range gates, but not all of them being used. For example, the APY-1 radar used 128 IPP’s with a fixed 50 range gates, producing 128 Doppler filters using an FFT. The different number of range gates on each of the five PRF’s all being less than 50.
Within radar technology PRF is important since it determines the maximum target range (Rmax) and maximum Doppler velocity (Vmax) that can be accurately determined by the radar.[1] Conversely, a high PRR/PRF can enhance target discrimination of nearer objects, such as a periscope or fast moving missile. This leads to use of low PRRs for search radar, and very high PRFs for fire control radars. Many dual-purpose and navigation radars—especially naval designs with variable PRRs—allow a skilled operator to adjust PRR to enhance and clarify the radar picture—for example in bad sea states where wave action generates false returns, and in general for less clutter, or perhaps a better return signal off a prominent landscape feature (e.g., a cliff).
Definition[edit]
Pulse repetition frequency (PRF) is the number of times a pulsed activity occurs every second.
This is similar to cycle per second used to describe other types of waveforms.
PRF is inversely proportional to time period  which is the property of a pulsed wave.
which is the property of a pulsed wave.

PRF is usually associated with pulse spacing, which is the distance that the pulse travels before the next pulse occurs.

Physics[edit]
PRF is crucial to perform measurements for certain physics phenomenon.
For example, a tachometer may use a strobe light with an adjustable PRF to measure rotational velocity. The PRF for the strobe light is adjusted upward from a low value until the rotating object appears to stand still. The PRF of the tachometer would then match the speed of the rotating object.
Other types of measurements involve distance using the delay time for reflected echo pulses from light, microwaves, and sound transmissions.
Measurement[edit]
PRF is crucial for systems and devices that measure distance.
- Radar
- Laser range finder
- Sonar
Different PRF allow systems to perform very different functions.
A radar system uses a radio frequency electromagnetic signal reflected from a target to determine information about that target.
PRF is required for radar operation. This is the rate at which transmitter pulses are sent into air or space.
Range ambiguity[edit]

A real target in 100 km or a second-sweep echo in a distance of 400 km
A radar system determines range through the time delay between pulse transmission and reception by the relation:

For accurate range determination a pulse must be transmitted and reflected before the next pulse is transmitted. This gives rise to the maximum unambiguous range limit:

The maximum range also defines a range ambiguity for all detected targets. Because of the periodic nature of pulsed radar systems, it is impossible for some radar system to determine the difference between targets separated by integer multiples of the maximum range using a single PRF. More sophisticated radar systems avoid this problem through the use of multiple PRFs either simultaneously on different frequencies or on a single frequency with a changing PRT.
The range ambiguity resolution process is used to identify true range when PRF is above this limit.
Low PRF[edit]
Systems using PRF below 3 kHz are considered low PRF because direct range can be measured to a distance of at least 50 km. Radar systems using low PRF typically produce unambiguous range.
Unambiguous Doppler processing becomes an increasing challenge due to coherency limitations as PRF falls below 3 kHz.
For example, an L-Band radar with 500 Hz pulse rate produces ambiguous velocity above 75 m/s (170 mile/hour), while detecting true range up to 300 km. This combination is appropriate for civilian aircraft radar and weather radar.


Low PRF radar have reduced sensitivity in the presence of low-velocity clutter that interfere with aircraft detection near terrain. Moving target indicator is generally required for acceptable performance near terrain, but this introduces radar scalloping issues that complicate the receiver. Low PRF radar intended for aircraft and spacecraft detection are heavily degraded by weather phenomenon, which cannot be compensated using moving target indicator.
Medium PRF[edit]
Range and velocity can both be identified using medium PRF, but neither one can be identified directly. Medium PRF is from 3 kHz to 30 kHz, which corresponds with radar range from 5 km to 50 km. This is the ambiguous range, which is much smaller than the maximum range. Range ambiguity resolution is used to determine true range in medium PRF radar.
Medium PRF is used with Pulse-Doppler radar, which is required for look-down/shoot-down capability in military systems. Doppler radar return is generally not ambiguous until velocity exceeds the speed of sound.
A technique called ambiguity resolution is required to identify true range and speed. Doppler signals fall between 1.5 kHz, and 15 kHz, which is audible, so audio signals from medium-PRF radar systems can be used for passive target classification.
For example, an L band radar system using a PRF of 10 kHz with a duty cycle of 3.3% can identify true range to a distance of 450 km (30 * C / 10,000 km/s). This is the instrumented range. Unambiguous velocity is 1,500 m/s (3,300 mile/hour).


The unambiguous velocity of an L-Band radar using a PRF of 10 kHz would be 1,500 m/s (3,300 mile/hour) (10,000 x C / (2 x 10^9)). True velocity can be found for objects moving under 45,000 m/s if the band pass filter admits the signal (1,500/0.033).
Medium PRF has unique radar scalloping issues that require redundant detection schemes.
High PRF[edit]
Systems using PRF above 30 kHz function better known as interrupted continuous-wave (ICW) radar because direct velocity can be measured up to 4.5 km/s at L band, but range resolution becomes more difficult.
High PRF is limited to systems that require close-in performance, like proximity fuses and law enforcement radar.
For example, if 30 samples are taken during the quiescent phase between transmit pulses using a 30 kHz PRF, then true range can be determined to a maximum of 150 km using 1 microsecond samples (30 x C / 30,000 km/s). Reflectors beyond this range might be detectable, but the true range cannot be identified.


It becomes increasingly difficult to take multiple samples between transmit pulses at these pulse frequencies, so range measurements are limited to short distances.[2]
Sonar[edit]
Sonar systems operate much like radar, except that the medium is liquid or air, and the frequency of the signal is either audio or ultra-sonic. Like radar, lower frequencies propagate relatively higher energies longer distances with less resolving ability. Higher frequencies, which damp out faster, provide increased resolution of nearby objects.
Signals propagate at the speed of sound in the medium (almost always water), and maximum PRF depends upon the size of the object being examined. For example, the speed of sound in water is 1,497 m/s, and the human body is about 0.5 m thick, so the PRF for ultrasound images of the human body should be less than about 2 kHz (1,497/0.5).
As another example, ocean depth is approximately 2 km, so sound takes over a second to return from the sea floor. Sonar is a very slow technology with very low PRF for this reason.
Laser[edit]
Light waves can be used as radar frequencies, in which case the system is known as lidar. This is short for «LIght Detection And Ranging,» similar to the original meaning of the initialism «RADAR,» which was RAdio Detection And Ranging. Both have since become commonly-used english words, and are therefore acronyms rather than initialisms.
Laser range or other light signal frequency range finders operate just like radar at much higher frequencies. Non-laser light detection is utilized extensively in automated machine control systems (e.g. electric eyes controlling a garage door, conveyor sorting gates, etc.), and those that use pulse rate detection and ranging are at heart, the same type of system as a radar—without the bells and whistles of the human interface.
Unlike lower radio signal frequencies, light does not bend around the curve of the earth or reflect off the ionosphere like C-band search radar signals, and so lidar is useful only in line of sight applications like higher frequency radar systems.
See also[edit]
- Radar
- Pulse-Doppler radar
- Weather radar
References[edit]
- ^ «Pulse Repetition Frequency». Radartutorial.
- ^ Piper, Samuel; Wiltse, James (2007). «Continuous Wave Radar». RF and Microwave Applications and Systems. Electrical Engineering Handbook. Vol. 20071745. doi:10.1201/9781420006711.ch14. ISBN 978-0-8493-7219-3. Retrieved January 29, 2011.[permanent dead link]
Частота повторения импульсов (PRF ) — это количество импульсов в повторяющийся сигнал в определенной единице времени, обычно измеряемый в импульсах в секунду . Этот термин используется в ряде технических дисциплин, в частности, радар.
. В радаре включается и выключается радиосигнал определенной несущей частоты ; термин «частота» относится к несущей, в то время как PRF относится к количеству переключателей. Оба значения измеряются в циклах в секунду или герцах. PRF обычно намного ниже, чем частота. Например, типичный радар Второй мировой войны, такой как Тип 7, имел базовую несущую частоту 209 МГц (209 миллионов циклов в секунду) и частоту повторения импульсов 300 или 500 импульсов в секунду. Связанная мера — это ширина импульса, время, в течение которого передатчик включен во время каждого импульса.
PRF — одна из определяющих характеристик радиолокационной системы, которая обычно состоит из мощного передатчика и чувствительного приемника, подключенных к одной антенне. После создания короткого импульса радиосигнала передатчик выключается, чтобы приемные устройства слышали отражения этого сигнала от удаленных целей. Поскольку радиосигнал должен идти к цели и обратно, требуемый период молчания между импульсами является функцией желаемой дальности действия радара. Для сигналов большего диапазона требуются более длительные периоды, требующие более низких значений PRF. И наоборот, более высокие частоты повторения импульсов производят более короткие максимальные дальности, но передают больше импульсов и, следовательно, радиоэнергии в заданное время. Это создает более сильные отражения, облегчающие обнаружение. Радиолокационные системы должны уравновешивать эти два конкурирующих требования.
При использовании старой электроники PRF обычно фиксировались на определенном значении или могли переключаться между ограниченным набором возможных значений. Это дает каждой радиолокационной системе характерный PRF, который может использоваться в радиоэлектронной борьбе для определения типа или класса конкретной платформы, такой как корабль или самолет, или, в некоторых случаях, конкретного подразделения. Приемники радиолокационных предупреждений в самолетах включают библиотеку общих PRF, которые могут определять не только тип радара, но в некоторых случаях режим работы. Это позволяло предупреждать пилотов, когда, например, батарея ЗРК SA-2 «заблокирована». Современные радиолокационные системы обычно способны плавно изменять свою частоту повторения импульсов, ширину импульса и несущую частоту, что значительно затрудняет идентификацию.
Системы сонара и лидара также имеют частоту повторения импульсов, как и любая импульсная система. В случае гидролокатора термин частота повторения импульсов (PRR ) является более распространенным, хотя он относится к той же концепции.
Содержание
- 1 Введение
- 2 Определение
- 3 Физика
- 4 Измерение
- 4.1 Неопределенность диапазона
- 4.2 Низкое PRF
- 4.3 Среднее PRF
- 4.4 Высокое PRF
- 4.5 Сонар
- 4.6 Лазер
- 5 См. Также
- 6 Ссылки
Введение
Электромагнитные (например, радио- или световые) волны — концептуально чистые одночастотные явления, тогда как импульсы можно математически представить как составные из ряда чистых частот, которые суммируются и обнуляются во взаимодействиях, которые создают последовательность импульсов определенных амплитуд, PRR, базовых частот, фазовых характеристик и так далее (см. Анализ Фурье ). Первый термин (PRF) чаще встречается в технической литературе по устройствам (Электротехника и некоторые науки), а последний (PRR) чаще используется в военно-аэрокосмической терминологии (особенно United Терминология вооруженных сил государств) и спецификации оборудования, такие как учебные и технические руководства для радаров и гидролокаторов.
обратная PRF (или PRR) называется временем повторения импульсов (PRT), интервалом повторения импульсов (PRI) или межимпульсным периодом (IPP), который представляет собой прошедшее время. время от начала одного импульса до начала следующего импульса. Термин IPP обычно используется для обозначения количества периодов PRT, подлежащих цифровой обработке. Каждый PRT имеет фиксированное число вентилей диапазона, но не все из них используются. Например, радар APY-1 использовал 128 IPP с фиксированными 50 стробами диапазона, создавая 128 доплеровских фильтров с использованием БПФ. Различное количество ворот дальности на каждом из пяти PRF все меньше 50.
В радаре технология PRF важна, поскольку она определяет максимальную дальность цели (R max) и максимальной доплеровской скорости (V max), которую может точно определить радар. И наоборот, высокий PRR / PRF может улучшить распознавание целей более близких объектов, таких как перископ или быстро движущаяся ракета. Это приводит к использованию низких PRR для поисковых радаров и очень высоких PRF для радаров управления огнем. Многие двухцелевые и навигационные радары, особенно военно-морские конструкции с переменными PRR, позволяют опытному оператору настраивать PRR для улучшения и прояснения радиолокационной картины — например, в плохих условиях моря, когда действие волн вызывает ложные отражения, и в целом для уменьшения помех. или, возможно, лучший ответный сигнал от видного объекта ландшафта (например, обрыва).
Определение
Частота повторения импульсов (PRF) — это количество раз, когда импульсная активность происходит каждую секунду.
Это похоже на цикл в секунду, используемый для описания других типов сигналов.
ЧСС обратно пропорциональна периоду времени T { displaystyle mathrm {T}}, который является свойством импульсной волны.
- T = 1 PRF { displaystyle mathrm {T} = { frac {1} { text {PRF}}}}

PRF обычно связан с интервалом между импульсами, который представляет собой расстояние, которое проходит импульс. до появления следующего импульса.
- Интервал между импульсами = Скорость распространения PRF { displaystyle { text {Интервал между импульсами}} = { frac { text {Скорость распространения}} { text {PRF}}}}
Физика
PRF имеет решающее значение для выполнения измерений определенных физических явлений.
Например, тахометр может использовать стробоскоп с регулируемой частотой повторения импульсов для измерения скорости вращения. PRF для стробоскопа регулируется в сторону увеличения от низкого значения до тех пор, пока вращающийся объект не будет казаться неподвижным. Тогда PRF тахометра будет соответствовать скорости вращающегося объекта.
Другие типы измерений включают расстояние с использованием времени задержки для отраженных эхо-импульсов от передачи света, микроволн и звука.
Измерение
PRF имеет решающее значение для систем и устройств, измеряющих расстояние.
Различные PRF позволяют системам выполнять очень разные функции.
Радиолокационная система использует радиочастотный электромагнитный сигнал, отраженный от цели, для определения информации об этой цели.
PRF требуется для работы радара. Это скорость, с которой импульсы передатчика отправляются в воздух или космос.
Неопределенность дальности
Реальная цель на 100 км или эхо-сигнал второго цикла на расстоянии 400 км
Радиолокационная система определяет дальность через временную задержку между передачей и приемом импульса по соотношению:
- Range = c τ 2 { displaystyle { text {Range}} = { frac {c tau} {2}}}
Для точного определения дальности импульс должен быть передан и отражен до следующего импульса передается. Это приводит к максимальному однозначному пределу диапазона:
- Max Range = c τ PRT 2 = c 2 PRF {τ PRT = 1 PRF { displaystyle { text {Max Range}} = { frac {c tau _ { text {PRT}}} {2}} = { frac {c} {2 , { text {PRF}}}} qquad { begin {cases} tau _ { text {PRT}} = { frac {1} { text {PRF}}} end {cases}}}
Максимальный диапазон также определяет неоднозначность диапазона для всех обнаруженных целей. Из-за периодической природы импульсных радиолокационных систем для некоторых радиолокационных систем невозможно определить разницу между целями, разделенными целыми кратными максимальной дальности, с использованием одного PRF. Более сложные радиолокационные системы позволяют избежать этой проблемы за счет использования нескольких PRF одновременно на разных частотах или на одной частоте с изменяющимся PRT.
Процесс разрешения неоднозначности диапазона используется для определения истинного диапазона, когда PRF превышает этот предел.
Низкая частота повторения импульсов
Системы, использующие частоту повторения импульсов ниже 3 кГц, считаются низкой частотой повторения импульсов, поскольку прямая дальность действия может быть измерена на расстоянии не менее 50 км. Радиолокационные системы, использующие низкий PRF, обычно дают однозначную дальность.
Однозначная доплеровская обработка становится все более сложной задачей из-за ограничений когерентности, поскольку PRF падает ниже 3 кГц.
Например, радар L-диапазона с частотой следования импульсов 500 Гц выдает неоднозначную скорость выше 75 м / с (170 миль / час) при обнаружении истинного диапазона до 300 км. Эта комбинация подходит для радаров гражданских самолетов и метеорологических радаров.
- дальность 300 км = C 2 × 500 { displaystyle { text {300 км дальность}} = { frac {C} {2 times 500} }}
- Скорость 75 м / с = 500 × C 2 × 10 9 { displaystyle { text {скорость 75 м / с}} = { frac {500 times C} {2 times 10 ^ {9 }}}}
РЛС с низкой частотой повторения импульсов имеют пониженную чувствительность при наличии низкоскоростных помех, которые мешают обнаружению самолетов вблизи местности. Индикатор движущейся цели обычно требуется для приемлемых характеристик вблизи местности, но при этом возникают проблемы с зубчатостью радара, которые усложняют приемник. РЛС с низкой частотой повторения импульсов, предназначенные для обнаружения самолетов и космических аппаратов, сильно страдают от погодных явлений, которые невозможно компенсировать с помощью индикатора движущейся цели.
Средняя частота повторения импульсов
Диапазон и скорость могут быть определены с помощью средней частоты повторения импульсов, но ни один из них не может быть идентифицирован напрямую. Средняя частота повторения импульсов составляет от 3 до 30 кГц, что соответствует дальности действия РЛС от 5 до 50 км. Это неоднозначный диапазон, который намного меньше максимального диапазона. Разрешение неоднозначности дальности используется для определения истинной дальности в радаре со средней частотой повторения импульсов.
Средняя частота повторения импульсов используется с импульсным доплеровским радаром, который требуется для обзора / сбивания в военных системах. Возвращение доплеровского радара обычно не является неоднозначным до тех пор, пока скорость не превысит скорость звука.
Для определения истинного диапазона и скорости требуется метод, называемый разрешением неоднозначности. Доплеровские сигналы находятся в диапазоне от 1,5 кГц до 15 кГц, что является слышимым, поэтому аудиосигналы от радиолокационных систем со средней частотой повторения импульсов могут использоваться для пассивной классификации целей.
Например, радиолокационная система диапазона L, использующая частоту повторения импульсов 10 кГц с рабочим циклом 3,3%, может определять истинную дальность на расстоянии 450 км (30 * C / 10 000 км. / с). Это инструментальный диапазон . Однозначная скорость составляет 1500 м / с (3300 миль / час).
- 450 км = C 0,033 × 2 × 10 000 { displaystyle { text {450 км}} = { frac {C} {0,033 times 2 times 10 000}}}
- 1500 м / с = 10 000 × C 2 × 10 9 { displaystyle { text {1,500 м / с}} = { frac {10 000 times C} {2 times 10 ^ {9}}}}
Однозначный Скорость радара L-диапазона, использующего частоту повторения импульсов 10 кГц, составит 1500 м / с (3300 миль / час) (10000 x C / (2 x 10 ^ 9)). Истинная скорость может быть найдена для объектов, движущихся со скоростью менее 45 000 м / с, если полосовой фильтр пропускает сигнал (1,500 / 0,033).
Средняя частота повторения импульсов имеет уникальные проблемы с зубчатостью радара, которые требуют избыточных схем обнаружения.
Высокий PRF
Системы, использующие функцию PRF выше 30 кГц, более известную как радар с прерывистой непрерывной волной (ICW), поскольку прямая скорость может быть измерена до 4,5 км / с в L диапазоне, но разрешение диапазона становится более трудным.
Высокая частота повторения импульсов ограничена системами, требующими работы на близком расстоянии, такими как бесконтактные предохранители и радар правоохранительных органов.
Например, если во время фазы покоя между импульсами передачи отбирается 30 выборок с использованием 30 кГц PRF, то истинный диапазон может быть определен максимум до 150 км с использованием 1 микросекундных выборок (30 x C / 30 000 км / с). Отражатели за пределами этого диапазона могут быть обнаружены, но истинный диапазон не может быть идентифицирован.
- 150 км = 30 × C 2 × 30 000 { displaystyle { text {150 км}} = { frac {30 times C} {2 times 30 000}}}
- 4500 м / с = 30 000 × C 2 × 10 9 { displaystyle { text {4,500 м / с}} = { frac {30 000 times C} {2 times 10 ^ {9}}}}
Он становится становится все труднее брать несколько выборок между импульсами передачи на этих частотах импульсов, поэтому измерения дальности ограничиваются небольшими расстояниями.
Сонар
Сонарные системы работают во многом как радары, за исключением того, что среда является жидкой или воздух, а частота сигнала — звуковая или ультразвуковая. Как и радар, более низкие частоты распространяют относительно более высокие энергии на большие расстояния с меньшей разрешающей способностью. Более высокие частоты, которые затухают быстрее, обеспечивают повышенное разрешение близлежащих объектов.
Сигналы распространяются со скоростью звука в среде (почти всегда в воде), а максимальная частота повторения импульсов зависит от размера исследуемого объекта. Например, скорость звука в воде составляет 1497 м / с, а толщина человеческого тела составляет около 0,5 м, поэтому PRF для ультразвуковых изображений человеческого тела должна быть меньше примерно 2 кГц (1497 /0,5).
В качестве другого примера глубина океана составляет примерно 2 км, поэтому звук возвращается с морского дна за секунду. По этой причине сонар — очень медленная технология с очень низким PRF.
Лазер
Световые волны могут использоваться в качестве радиолокационных частот, и в этом случае система известна как лидар. Это сокращение от «LIght Detection And Ranging», аналогичное первоначальному значению инициализма «RADAR», которое было RAdio Detection And Ranging. С тех пор оба слова стали широко используемыми английскими словами и поэтому являются скорее сокращениями, чем инициализмами.
Лазерные дальномеры или другие дальномеры светового сигнала работают так же, как радар, на гораздо более высоких частотах. Нелазерное обнаружение света широко используется в автоматизированных системах управления машинами (например, электрические глаза, управляющие воротами гаража, сортировочными воротами конвейера и т. радар — без наворотов человеческого интерфейса.
В отличие от более низких частот радиосигнала, свет не огибает изгиб Земли и не отражается от ионосферы, как сигналы поисковых радаров C-диапазона, поэтому лидар полезен только в прицелы, такие как высокочастотные радарные системы.
См. Также
Справочная информация
Расчёт скважности и длительности импульсов
Одним из важных параметров периодического сигнала является скважность импульсов
Основы скважности и длительности импульсов
Частота повторения импульсов F — это количество импульсов, генерируемых в течении одной секунды.
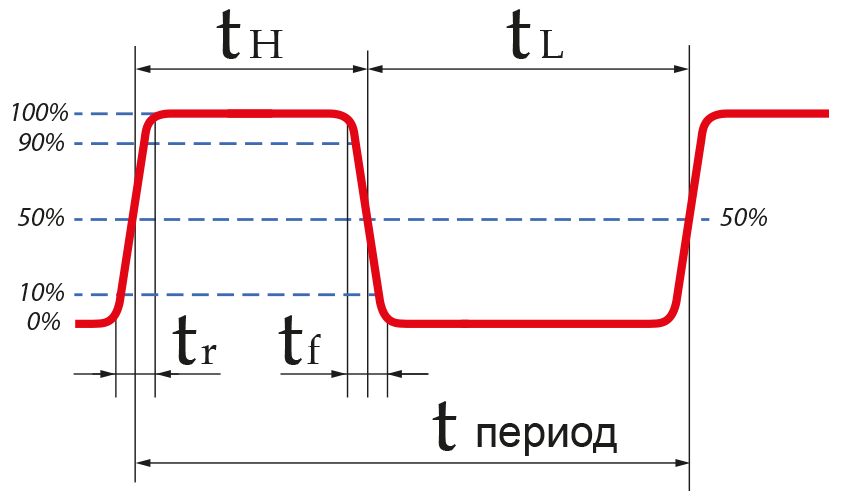
Период импульсной последовательности Т – это время импульса tH, сложенное со временем паузы tL:
T = tH + tL = 1 / F
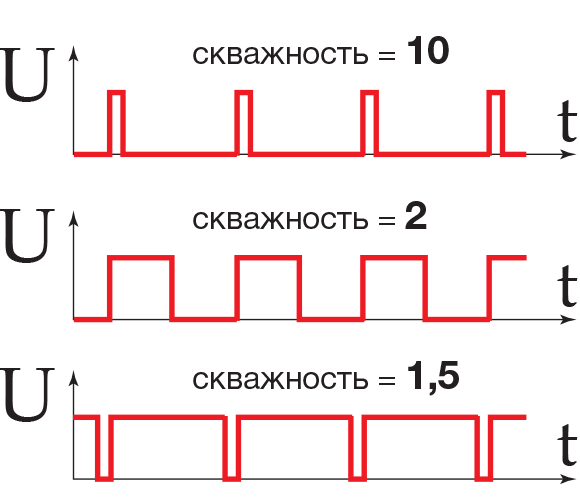
Скважность S импульсной последовательности — это отношение периода к длительности импульса:
S = T / tH (S > 1)
Обратная величина скважности — это коэффициент заполнения D:
D = tH / T
Коэффициент может быть выражен в процентах:
D = (tH / T) × 100%
Длительность прямоугольного импульса определяется на уровне 50% его амплитуды.
Время нарастания импульса tr — это интервал времени, измеренный между моментами, когда амплитуда изменяется от 0,1 до 0,9 установившегося значения. Между этими же уровнями измеряется и время спада импульса tf.
Сигнал идеальной формы имеет значение равное нулю для tr и tf.
Расчет скважности и длительности импульса
Введите любые два значения
Длительность импульсов 1
tH
Длительность импульсов 2
tL
![]()
Обнаружили ошибку или неточность в работе калькулятора? Сообщите нам об этом.
![]() Соблюдайте технику безопасности во время работы с электронными компонентами!
Соблюдайте технику безопасности во время работы с электронными компонентами!
Частота повторения импульсов


время передачи
или длительность
импульса τ
Следующий
зондирующий
импульс
Тестовые
импульсы
Эхо-сигнал
интервал приема
интервал
покоя
Время повторения импульса (PRT)
или период повторения импульса (PRP)
Рис. 1: Временные этапы периодов работы радиолокатора
время передачи
или длительность
импульса τ
Следующий
зондирующий
импульс
Тестовые
импульсы
Эхо-сигнал
интервал приема
интервал
покоя
Время повторения импульса (PRT)
или период повторения импульса (PRP)
Рис. 1: Временные этапы периодов работы радиолокатора
Что такое частота повторения?
Частота повторения импульсов
Частота повторения импульсов (англ.: Pulse Repetition Frequency PRF )
— это количество импульсов, которые формируются передатчиком в единицу времени, обычно — в секунду.
Радиолокатор излучает каждый импульс на несущей частоте в течение времени передачи (или длительности импульса τ),
ожидает возврата эхо-сигналов в течение времени «слушания» или интервала приема и затем излучает следующий импульс (что показано на Рисунке 1).
Время между началом одного импульса и началом следующего импульса называется периодом повторения (иногда — следования) импульсов или межимпульсным интервалом
(англ.: Pulse Repetition Time PRT
или Pulse Repetition Period PRP ).
Период повторения импульсов есть величина, обратная частоте повторения импульсов, то есть:
Интервал приема
В общем смысле, интервал приема — это интервал времени между излучаемыми импульсами.
Интервал приема всегда меньше чем разность между периодом повторения импульсов и длительностью импульса.
Он иногда ограничивается так называемым интервалом покоя,
в течение которого приемник уже выключен непосредственно перед следующим излучаемым импульсом.
В некоторых радиолокаторах между излучаемым импульсом и интервалом приема существует короткий интервал времени,
соответствующий времени восстановления антенного переключателя.
В течение этого времени
антенный переключатель
исключает проникновение излучаемых импульсов большой мощности в приемник.
В случае очень низкой излучаемой мощности необходимости в этом нет и прием эхо-сигналов может происходить уже во время излучения.
В таких случаях интервал приема включает в себя время излучения.


следующая пачка
пачка
(состоящая здесь из
четырех импульсов)
общий интервал покоя
Рисунок 2. Режим излучения пачек для импульсного радиолокатора
следующая пачка
пачка
(состоящая здесь из
четырех импульсов)
общий интервал покоя
Рисунок 2. Режим излучения пачек для импульсного радиолокатора
Интервал покоя
Если интервал приема заканчивается еще до момента излучения следующего импульса, то промежуток между ними называют интервалом покоя.
Как правило, в современных радиолокаторах в этом промежутке времени выполняются циклы тестирования.
Для радиолокаторов, использующих
фазированные антенные решетки,
такой интервал покоя является критически необходимым.
В это время
фазовращатели
антенны должны быть перепрограммированы для подготовки к переносу луча антенны в следующее требуемое направление.
Эта операция может занимать до 200 мкс, поэтому в таких случаях интервал покоя принимает довольно большие значения по сравнению с интервалом приема.
В течение этого интервала покоя приемник уже выключен поскольку во время перепрограммирования антенны не может выполняться прием эхо-сигналов.
Поскольку в течение интервала покоя в любом случае не могут быть обработаны никакие реальные данные,
то это время используется для выполнения внутренних процедур тестирования в модулях приемного тракта.
Это делается для проверки состояния определенных электронных цепей и, в случае необходимости, их регулировки.
Для этого генерируются сигналы с известными параметрами.
Такие сигналы поступают в приемный тракт и их обработка в отдельных модулях контролируется.
Для того, чтобы отметки этих сигналов не появлялись на индикаторе видеопроцессор отключает эти сигналы.
При необходимости, по результатам тестирования модули приемника могут быть автоматически перенастроены и сформировано детализированное сообщение об ошибке.
Режим излучения пачек импульсов
Распределение длительности интервала покоя не должно быть равномерным.
Для этого могут излучаться один за другим несколько импульсов, каждый из которых имеет короткий интервал приема до начала интервала покоя.
Например, если в течение нескольких периодов импульсы излучаются в одном направлении
(как это необходимо для обработки пары импульсов или для
обнаружения движущейся цели), тогда интервал покоя не является необходимым.
Это положительно влияет на
бюджет времени радиолокатора.
Кроме этого, в течение более короткого времени случайное нежелательное изменение фазы генерируемого сигнала маловероятно.
Поэтому радиолокатор будет более точным при измерении дальности.
Одновременно с этим в таком режиме частота повторения импульсов намного выше, чем в обычном режиме.
Благодаря этому увеличивается однозначно определяемая скорость (смотри
Противоречие Допплера).
Режим излучения пачек импульсов в основном используется в
дидактических (учебных) радиолокаторах.
В таких радиолокаторах не требуется большого интервала приема из-за коротких расстояний в лабораторных помещениях.
Однако им требуется более длительный интервал покоя для передачи данных об эхо-сигналах по относительно узкополосному последовательному интерфейсу на компьютер.
Например, они передают только 10 импульсов в секунду, что соответствует средней частоте повторения импульсов 10 Гц.
Эти десять импульсов передаются, но в течение 200 микросекунд.
Для расчета однозначной допплеровской частоты это соответствует частоте повторения импульсов 50 кГц.
Последующее время покоя составляет почти целую секунду.
В течение этого времени данные передаются по интерфейсу USB со скоростью 280 Мбит/с.
Частота повторения импульсов Калькулятор
| Search | ||
| Дом | Инженерное дело ↺ | |
| Инженерное дело | Электроника ↺ | |
| Электроника | Радиолокационная система ↺ | |
| Радиолокационная система | Параметр радара ↺ |
|
✖Максимальная дальность однозначности — это дальность, за пределами которой цель появляется, поскольку эхо-сигналы во второй раз — это максимальная дальность однозначности, Run.ⓘ Максимальный диапазон однозначности [Run] |
+10% -10% |
|
✖Частота повторения импульсов — это частота, с которой высвобождается импульс.ⓘ Частота повторения импульсов [tf] |
⎘ копия |
Частота повторения импульсов Решение
ШАГ 0: Сводка предварительного расчета
ШАГ 1. Преобразование входов в базовый блок
Максимальный диапазон однозначности: 1004 километр —> 1004000 метр (Проверьте преобразование здесь)
ШАГ 2: Оцените формулу
ШАГ 3: Преобразуйте результат в единицу вывода
149.299032868526 Герц —> Конверсия не требуется
18 Параметр радара Калькуляторы
Частота повторения импульсов формула
Частота повторения импульсов = [c]/(2*Максимальный диапазон однозначности)
tf = [c]/(2*Run)
Что такое PRT и PRF?
PRF означает частоту повторения импульсов. Он равен количеству импульсов, которые передаются в секунду. PRT означает время повторения импульса. Время между началом одного импульса и началом следующего называется временем повторения импульса. PRF и PRT связаны следующим уравнением