Как найти количество колебаний зная частоту и время?
Не период.
Вопрос Как найти количество колебаний зная частоту и время?, расположенный на этой странице сайта, относится к
категории Физика и соответствует программе для 10 — 11 классов. Если
ответ не удовлетворяет в полной мере, найдите с помощью автоматического поиска
похожие вопросы, из этой же категории, или сформулируйте вопрос по-своему.
Для этого ключевые фразы введите в строку поиска, нажав на кнопку,
расположенную вверху страницы. Воспользуйтесь также подсказками посетителей,
оставившими комментарии под вопросом.
Формула частоты в физике
Формула частоты
Определение
Частота — это физический параметр, которые используют для характеристики периодических процессов.
Частота равна количеству повторений или свершения событий в единицу времени.
Чаще всего в физике частоту обозначают буквой $nu ,$ иногда встречаются другие обозначения частоты, например $f$ или $F$.
Частота (наряду со временем) является самой точно измеряемой величиной.
Формула частоты колебаний
При помощи частоты характеризуют колебания. В этом случае частота является физической величиной обратной периоду колебаний $(T).$
[nu =frac{1}{T}left(1right).]
Частота, в этом случае — это число полных колебаний ($N$), совершающихся за единицу времени:
[nu =frac{N}{Delta t}left(2right),]
где $Delta t$ — время за которое происходят $N$ колебаний.
Единицей измерения частоты в Международной системе единиц (СИ) служат в герцы или обратные секунды:
[left[nu right]=с^{-1}=Гц.]
Герц — это единица измерения частоты периодического процесса, при которой за время равное одной секунде происходит один цикл процесса. Единица измерения частоты периодического процесса получила свое наименование в честь немецкого ученого Г. Герца.
Частота биений, которые возникают при сложении двух колебаний, происходящих по одной прямой с разными, но близкими по величине частотами (${nu }_1 и {nu }_2$) равна:
[{nu =nu }_1- {nu }_2left(3right).]
Еще одно величиной характеризующей колебательный процесс является циклическая частота (${omega }_0$), связанная с частотой как:
[{omega }_0=2pi nu left(4right).]
Циклическая частота измеряется в радианах, деленных на секунду:
[left[{omega }_0right]=frac{рад}{с}.]
Частота колебаний тела, имеющего массу$ m,$ подвешенного на пружине с коэффициентом упругости $k$ равна:
[nu =frac{1}{2pi sqrt{{m}/{k}}}left(5right).]
Формула (4) верна для упругих, малых колебаний. Кроме того масса пружины должна быть малой по сравнению с массой тела, прикрепленного к этой пружине.
Для математического маятника частоту колебаний вычисляют как: длина нити:
[nu =frac{1}{2pi sqrt{{l}/{g}}}left(6right),]
где $g$ — ускорение свободного падения; $ l$ — длина нити (длина подвеса) маятника.
Физический маятник совершает колебания с частотой:
[nu =frac{1}{2pi sqrt{{J}/{mgd}}}left(7right),]
где $J$ — момент инерции тела, совершающего колебания относительно оси; $d$ — расстояние от центра масс маятника до оси колебаний.
Формулы (4) — (6) приближенные. Чем меньше амплитуда колебаний, тем точнее значение частоты колебаний, вычисляемых с их помощью.
Формулы для вычисления частоты дискретных событий, частота вращения
дискретных колебаний ($n$) — называют физическую величину, равную числу действий (событий) в единицу времени. Если время, которое занимает одно событие обозначить как $tau $, то частота дискретных событий равна:
[n=frac{1}{tau }left(8right).]
Единицей измерения частоты дискретных событий является обратная секунда:
[left[nright]=frac{1}{с}.]
Секунда в минус первой степени равна частоте дискретных событий, если за время, равное одной секунде происходит одно событие.
Частотой вращения ($n$) — называют величину, равную количеству полных оборотов, которое совершает тело в единицу времени. Если $tau $ — время, затрачиваемое на один полный оборот, то:
[n=frac{1}{tau }left(9right).]
Примеры задач с решением
Пример 1
Задание. Колебательная система совершила за время равное одной минуте ($Delta t=1 мин$) 600 колебаний. Какова частота этих колебаний?
Решение. Для решения задачи воспользуемся определением частоты колебаний: Частота, в этом случае — это число полных колебаний, совершающихся за единицу времени.
[nu =frac{N}{Delta t}left(1.1right).]
Прежде чем переходить к вычислениям, переведем время в единицы системы СИ: $Delta t=1 мин=60 с$. Вычислим частоту:
[nu =frac{600}{60}=10 left(Гцright).]
Ответ. $nu =10Гц$
Пример 2
Задание. На рис.1 изображен график колебаний некоторого параметра $xi (t)$, Какова амплитуда и частота колебаний этой величины?
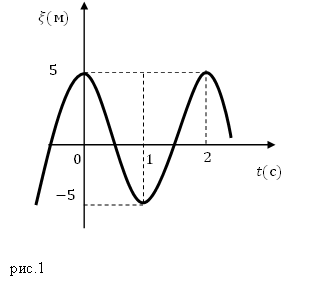
Решение. Из рис.1 видно, что амплитуда величины $xi left(tright)={xi }_{max}=5 (м)$. Из графика получаем, что одно полное колебание происходит за время, равное 2 с, следовательно, период колебаний равен:
[T=2 left(cright).]
Частота — величина обратная периоду колебаний, значит:
[nu =frac{1}{T}=0,5 left(Гцright).]
Ответ. 1) ${xi }_{max}=5 (м)$. 2) $nu =0,5$ Гц
Читать дальше: формулы математического маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Куда бы мы ни посмотрели, колебаниеs происходят. Даже атомы, из которых мы состоим, тоже в настоящее время колеблются. Итак, в этом посте мы узнаем, как рассчитывать колебания.
Нам нужно знать период колебания, чтобы рассчитать колебания. И исходя из периода времени, мы получим частоту колебаний, взяв его возвратно-поступательное движение. Частота колебаний даст нам количество колебаний в единицу времени.
Перед тем, как углубиться в то, как рассчитать колебание, мы сначала получаем краткое представление о колебании, его цикле, периоде времени и частоте.
Физика колебаний:
Колебание — это движение, которое повторяется по величине или положению вокруг точки равновесия или центральной точки на том же пути. Например, качающийся маятник, вибрирующая пружина в гитаре и т. Д. Являются примерами колебаний.
Один цикл колебаний — это одно полное колебание, которое включает возврат в начальную точку и повторение движения. Чтобы завершить этот единственный цикл, сколько бы времени ни потребовалось, это не что иное, как его временной период. Кроме того, взяв его обратно, мы будем иметь частоту колебаний, которая считается числом колебаний за период времени.
Давайте теперь посмотрим, какова формула колебания.
Какая формула колебания?
Формула колебаний — это просто частота формулы колебаний. Таким образом, мы можем записать это как
Когда вы думаете об осцилляциях, первое, что приходит на ум, — это простой гармонический осциллятор. Итак, давайте сначала взглянем на уравнение движения для простого гармонический генератор прежде чем знать, как рассчитать колебания.
Уравнение движения для SHM (простого гармонического осциллятора):
Предположим, что частица подвешена и колеблется вдоль оси Y. В результате в любой момент времени t уравнение для положения имеет следующий вид:
y (t) = A sin⍵t… .. (1)
Здесь A — амплитуда или максимальное отклонение от положения равновесия.
& — угловая частота колеблющейся частицы и определяется выражением
Or
Таким образом, уравнение (1) можно записать в виде
y (t) = A sin (2𝜋f) t… .. (2)
Первая производная уравнения (2) даст скорость частицы, а вторая производная даст ускорение частицы.
Таким образом,
v (t) = 2𝜋fA cos (2𝜋ft)… .. (3)
а (t) = — (2𝜋f)2 [Грех (2𝜋ft)]… .. (4)
Подставляя значение уравнения (2) в (4), получим,
а (t) = — (2𝜋f)2 y (t)… .. (5)
∴ а = -4𝜋2f2 у… .. (6)
Итак, если мы хотим выяснить, как рассчитать колебания, мы рассмотрим два разных сценария: система пружина-масса и маятник.
➠ Как рассчитать колебания системы пружинных масс:
Рассмотрим груз, подвешенный к одному концу пружины, как показано на рисунке ниже. Из-за веса груза пружина будет растянута на расстояние y. Таким образом, восходящее усилие пружины согласно закону Гука составляет:
F = -ки
где k постоянная пружины, который измеряет жесткость пружины, а y — растяжение пружины.
В разделе система массы пружины, сила пружины направлена вверх, а сила тяжести направлена вниз. Когда обе силы уравновешивают друг друга, масса становится неподвижной. Таким образом, мы можем написать:
мг = -ки
Поскольку г гравитационное ускорение, подставляя значение уравнения (6) в приведенное выше уравнение, получаем,
∴m (-4𝜋2f2у) = -ки
Делая частоту f объектом уравнения, мы получаем
… .. (7)
Таким образом, период времени может быть задан как:
… .. (8)
После системы пружинных масс давайте посмотрим, как рассчитать колебания маятника.
➠ Как рассчитать колебания маятника:
Для расчета колебания маятника рассмотрим три случая:
- Простой маятник
- Физический или составной маятник
- Крутильный маятник
✽ Колебания простого маятника:
Простой маятник состоит из веревки, прикрепленной к массе m. Как показано на рисунке ниже, если груз массой m удаляется от положения равновесия на угол 𝜃, то возвращающая сила возвращает его в положение равновесия. Боб подвергается действию сил тяжести и натяжения струны. Напряжение пружины уравновешивается составляющей cos веса боба. Возвратная сила маятника возникает из-за тангенциальной составляющей или синусоидальной составляющей гравитационной силы.
Таким образом, величина восстанавливающей силы составляет,
| F | = мгсин𝜃
Боб сможет ускоряться за счет возвращающей силы. В результате, согласно второму закону Ньютона,
ма = F = -mgsin𝜃
где отрицательный знак показывает, что возвращающая сила направлена в противоположном направлении движения боба.
Ускорение будет угловым, так как боб движется по дуге окружности. Угловое ускорение определяется выражением
Таким образом, из приведенных выше уравнений,
Но поскольку смещение невелико, мы можем считать sin𝜃 = 𝜃. Таким образом,
Приведенное выше уравнение показывает зависимость угловое ускорение по угловому смещению. Таким образом, из уравнения (6)
𝛼 = 4𝜋2f2𝜃
Таким образом, частота и временной период простого маятника равны:
✽ Колебания составного или физического маятника:
Система, образованная путем подвешивания твердого тела на фиксированной горизонтальной оси, известна как физический маятник. Если «I» — это момент инерции колеблющегося твердого тела, частота и период времени физического маятника равны:
✽ Колебания крутильного маятника:
Система называется крутильным маятником, когда конец тонкой проволоки или стержня прикреплен к дискообразной массе. Если «I» — это инерция диска, частота и период крутильного маятника могут быть выражены как,
Таким образом, учитывая Во всех трех случаях можно сделать вывод, что частота и период времени маятника зависят от длины шнура и не зависят от массы тела.. Вам может быть интересно, как практически рассчитать временной период колебаний. Итак, давайте посмотрим, как рассчитывается время колебаний.
Как рассчитывается время колебания?
Временной период колебания можно рассчитать как экспериментально, так и математически.
Методика эксперимента с пружинно-массовой системой и маятником практически одинакова. Разница в том, что вам не нужно выяснять жесткость пружины, поскольку мы не используем пружину в маятнике.
- Чтобы рассчитать колебания системы массовых пружин, вам необходимо найти жесткость пружины k. Чтобы найти жесткость пружины, позвольте массе висеть на пружине в неподвижном состоянии. Затем добавьте дополнительную массу и запишите изменение растяжения пружины.
мг -ky = 0
- После определения жесткости пружины необходимо записать время для десяти колебаний каждой массы. Чтобы получить точный ответ, повторите этот процесс трижды. Среднее значение этих трех периодов времени считается периодом времени этой конкретной массы. После этого возьмите обратную величину, и вы получите количество колебаний за единицу времени. Вы можете сравнить свои ответы, подставив значения в соответствующие уравнения частоты и периода времени.
Мы надеемся, что мы учли все ваши опасения по поводу расчета колебаний.
Колебательное движение очень распространено. Заставить колебаться можно любое тело, если приложить к нему силу — однократно или постоянно. К примеру, если подтолкнуть качели, они начнут качаться вперед-назад, и такое движение будет приблизительно повторяться до тех пор, пока качели полностью не остановятся.
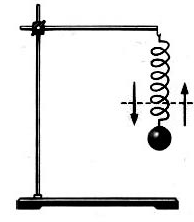
Другой пример колебательного движения — тело, подвешенное к пружине. Если его потянуть вниз и отпустить, то за счет сил упругости оно сначала поднимется вверх, а затем снова опустится вниз, затем движения вверх-вниз будут повторяться. Со временем они прекратятся под действием силы сопротивления воздуха.
Колебаниями можно назвать даже движение гири, которую поднимается тяжелоатлет вверх, а затем опускает в низ. При этом он будет прикладывать к гире силу постоянно. Гиря будет колебаться до тех пор, пока к нему будет прикладываться эта сила.
Определения
Колебания — это движения, которые точно или приблизительно повторяются через определенные интервалы времени.
Механические колебания — это колебательные движения, совершаемые физическим телом в механической системе.
Механическая система — совокупность материальных точек (тел), движения которых взаимосвязаны между собой.
Какими бывают колебания?
Напомним, что в механической системе выделяют два вида сил:
- Внутренние силы — это силы, которые возникают между телами внутри системы. Примером внутренних сил служат силы тяготения между телами солнечной системы.
- Внешние силы — силы, которые действуют на тела системы со стороны тел, которые в эту систему не входят. Примером внешней силы может стать сила ветра, под действием которой шарик, подвешенный к опоре за нить, отклоняется в сторону порыва ветра.
Свободные колебания
Определения
Свободные колебания — колебания, происходящие в системе под действием внутренних сил после того, как эта система выведена из положения равновесия.
Колебательная система — механическая система, в которой возможно совершение свободных колебаний.
Свободные колебания в колебательной системе могут возникнуть только при наличии двух условий:
- После выведения из равновесия в колебательной системе появляются силы, направленные в сторону положения равновесия. Эти силы стремятся возвратить систему в положение равновесия.
- Трение между телами колебательной системы относительно мало. В противном случае колебания либо сразу затухнут, либо не начнутся совсем.
Примеры свободных колебаний:
- колебания шарика на дне сферической чаши;
- движение качелей после однократного толчка;
- колебания груза на пружине после ее растяжения;
- колебания струны после ее отклонения.


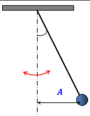
Примером колебательной системы также служит математический маятник — материальная точка, подвешенная на невесомой нерастяжимой нити. В действительности такого маятника не существует. Это идеализированная модель реального маятника, примером которого служит тяжелый шарик, подвешенный на длинной нити. В этом случае размером шарика и растяжением нити можно пренебречь.
В колебательную систему математического маятника входят:
- нить;
- тело, привязанное к нити;
- Земля, в поле тяжести которой находится привязанное к нити тело.
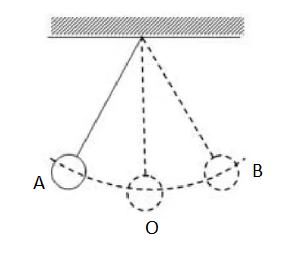
В положении равновесия (точка О) шарик висит на нити и покоится. Если его отклонить от положения равновесия до точки А и отпустить, под действием силы тяжести шарик приблизится к положению равновесия. Так как к этому моменту шарик обретет скорость, он не сможет остановиться и приблизится к точке В. Затем он снова вернется в точку А через положение равновесия в точке О. Шарик будет колебаться, пока не затухнут под действием возникающей силы сопротивления воздуха.
Вынужденные колебания
Определение
Вынужденные колебания — колебания тел под действием внешних периодически изменяющихся сил.
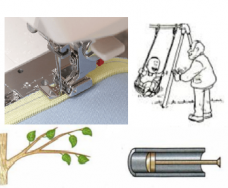
Примерами вынужденных колебаний служат:
- движение поршня в цилиндре;
- раскачивание ветки дерева на ветру;
- движение иглы швейной машинки;
- движение качелей под действием постоянных толчков.
Затухающие и незатухающие колебания
Определение
Затухающие колебания — колебания, которые со временем затухают. При этом максимальное отклонение тела от положения равновесия с течением времени уменьшается.
Колебания затухают под действием сил, препятствующих колебательному движению. Так, шарик в сферической чаше перестает колебаться под действием силы трения. Математический маятник и качели перестают совершать колебательные движения за счет силы сопротивления воздуха.
Важно!
Все свободные колебания являются затухающими, так как всегда присутствует трение или сопротивление среды.
Незатухающими колебаниями могут быть только те, которые совершаются под действием периодической внешней силы (вынужденные колебания). Так, ветка будет раскачиваться до тех пор, пока дует ветер. Когда он перестанет дуть, колебания ветки со временем затухнут. Иголка швейной машинки будет совершать колебательные движения до тех пор, пока швея вращает ручку привода. Когда она перестанет это делать, иголка сразу остановится.
Динамика колебательного движения
Для того чтобы описать количественно колебания тела пол действием силы упругости пружины или колебания шарика, подвешенного на нити, воспользуемся законами механики Ньютона.
Уравнение движения тела, колеблющегося под действием сил упругости
Рассмотрим колебательное движение шарика, вызванное силой упругости, возникшей при растяжении горизонтальной пружины вдоль оси Ох.
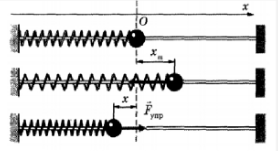
Согласно II закону Ньютона произведение массы тела на ускорение равно равнодействующей всех сил приложенных к телу. Поскольку сила трения пренебрежимо мала, мы можем считать, что в этой механической системе действует единственная сила — сила упругости. Учтем, что шарик колеблется вдоль одной прямой, и выберем одномерную систему координат Ох. Тогда:
m→a=→F
max=Fx упр
Согласно закону Гука, проекция сила упругости прямо пропорциональная смещению шарика из положения равновесия (точки О). Смещение равно координате x шарика, причем проекция силы и координаты имеют разные знаки. Это связано с тем, что сила упругости всегда направлена к точке равновесия, в то время как расстояние от этой точки во время движения увеличивается в обратную сторону. Отсюда делаем вывод, что сила упругости равна:
Fx упр=−kx
где k — жесткость пружины.
Тогда уравнение движения шарики принимает вид:
max=−kx
Или:
ax=−kmx
Так как масса шарики и жесткость пружины для данной колебательной системы постоянны, отношение km — постоянная величина. Отсюда делаем вывод, что проекция ax ускорения тела прямо пропорциональна его координате x, взятой с противоположным знаком.
Пример №1. Груз массой 0,1 кг прикрепили к пружине школьного динамометра жесткостью 40 Н/м. В начальный момент времени пружина не деформирована. После того, как груз отпускают, возникают колебания. Чему равна максимальная скорость груза?
Максимальной скорости груз достигнет при максимальном его отклонении от положения равновесия — в нижней точке траектории. Учтем, что тело движется вниз под действием силы тяжести. Но в то же время на него действует сила упругости, которая возникает в пружине и нарастает до тех пор, пока не становится равной по модулю силе тяжести. Применив III закон Ньютона получим:
∣∣∣→Fтяж∣∣∣=∣∣∣→Fупр∣∣∣
Тогда:
mg=kymax
где ymax — максимальное отклонение груза от положения равновесия. В этой точке скорость тела будет максимальная. Для нахождения этой величины используем формулу из кинематики:
ymax=v2max−v202g
Начальная скорость равна нулю. Отсюда:
ymax=v2max2g
Тогда:
mg=kv2max2g
Максимальная скорость равна:
vmax=g√2mk=10√2·0,140≈0,71 (мс)
Уравнение движения математического маятника
Ниже на рисунке представлен математический маятник. Если мы выведем из положения равновесия шарик и отпустим, возникнет две силы:
- сила тяжести, направленная вниз;
- сила упругости, направленная вдоль нити.
При колебаниях шарика также будет возникать сила сопротивления воздуха. Но так как она очень мала, мы будем ею пренебрегать.
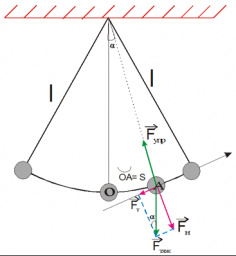
Чтобы описать динамику движения математического маятника, удобно силу тяжести разложить на две составляющие:
→Fт=→Fτ+→Fn
Причем компонента →Fτ направлена перпендикулярно нити, а →Fn — вдоль нее.
Компонента →Fτ представляет собой проекцию силы тяжести в момент, когда нить маятника отклонена от положения равновесия (точки О) на угол α. Следовательно, она равна:
→Fτ=−→Fтsinα=−mgsinα
Знак «–» мы здесь поставили по той причине, что компоненты силы тяжести →Fτ и α имеют противоположные знаки. Ведь если отклонить шарик на угол α>0, то составляющая →Fτ будет направлена в противоположную сторону, так как она будет пытаться вернуть шарик в положение равновесия. И ее проекция будет отрицательной. Если же шарик отклонить на угол α<0, то составляющая →Fτ будет направлена в обратную сторону. В этом случае ее проекция будет положительной.
Обозначим проекцию ускорения маятника на касательную к его траектории через aτ. Эта проекция характеризует быстроту изменения модуля скорости маятника. Согласно II закону Ньютона:
maτ=Fτ
Или
maτ=−mgsinα
Разделим обе части выражения на массу шарика m и получим:
aτ=−gsinα
При малом отклонении нити маятника от вертикали можно считать, что sinα≈α (при условии, что угол измерен в радианах). Тогда:
aτ=−gα
Внимание! Чтобы перевести градусы в радианы, нужно умножить градусы на число π и поделить результат на 180. К примеру 2о = 2∙3,14/180 рад., или 2о = 0,035 рад.
При малом отклонении также дугу ОА мы можем принять за длину отрезка OA, который мы примем за s. Тогда угол α будет равен отношению противолежащего катета (отрезка s) к гипотенузе (длине нити l):
α=sl
Отсюда:
aτ=−gls
Так как ускорение свободного падения и длина нити для данной колебательной системы постоянны, то отношение gl — тоже постоянная величина.
Это уравнение похоже на то уравнение, которое мы получили для описания колебательного движения шарика под действием силы упругости. И оно также позволяет сделать вывод, что ускорение прямо пропорционально координате.
Пример №2. Определить длину нити, если шарик, подвешенный к ней, отклонится на 1 см. При этом нить образовала с вертикалью угол, равный 1,5о.
При отклонениях на малый угол мы можем пользоваться следующей формулой:
α=sl
Чтобы найти длину нити, нужно выразить угол α в радианах:
1,5°=3,14·1,5180≈0,026 (рад)
1 см = 0,01 м
Тогда длина нити равна:
l=sα=0,010,026≈0,385 (м)=38,5 (см)
Основные характеристики колебательного движения
Определения
Амплитуда — максимальное отклонение тела от положения равновесия. Обозначается буквой A, иногда — xmax. Единиц измерения — метр (м).
Период — время совершения одного полного колебания. Обозначается буквой T. Единица измерения — секунда (с).
Частота — количество колебаний, совершенных в единицу времени. Обозначается как ν («ню»). Единица измерения — 1/секунда, или секунда–1, или герц (1/с, или с–1, или Гц).
Период и частота колебаний связаны между собой следующей формулой:
ν=1T
Период колебаний также можно вычислить, зная количество совершенных колебаний N за время t:
T=tN
Поскольку частота — это величина, обратная периоду колебаний, ее можно выразить в виде:
ν=Nt
Пример №3. Определить частоту колебаний груза, если суммарный путь, который он прошел за 2 секунды под действием силы упругости, составил 1 м. Амплитуда колебаний равна 10 см.
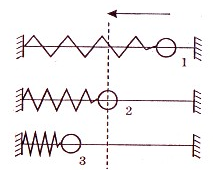
Во время одного колебания груз проходит расстояние, равное 4 амплитудам. Посмотрите на рисунок. Положение равновесия соответствует состояние 2. Чтобы совершить одно полное колебание, сначала груз отводят в положение 1. Когда его отпускают, он проходит путь 1–2 и достигает положения равновесия. Этот путь равен амплитуде колебаний. Затем он продолжает движение до состояния 3. И в это время он проходит расстояние 2–3, равное еще одной амплитуде колебаний. Чтобы вернуться в исходное положение (состояние 1), нужно снова проделать путь в обратном направлении: сначала 3–2, затем 2–1.
Следовательно, количество колебаний равно отношению пройденного пути к амплитуде, помноженной на 4:
N=s4A
10 см = 0,1 м
Так как мы знаем, что эти колебания совершались в течение 2 секунд, для вычисления частоты мы можем использовать формулу:
ν=Nt=s4At=14·0,1·2=1,25 (Гц)
Задание EF17593
В таблице представлены данные о положении шарика, колеблющегося вдоль оси Ох, в различные моменты времени.

Каков период колебаний шарика?
Ответ:
а) 1 с
б) 2 с
в) 3,2 с
г) 4 с
Алгоритм решения
1.Определить амплитуду колебаний.
2.Определить время между двумя максимальными отклонениями от положения равновесия шарика.
3.Найти полный период колебаний.
Решение
Из таблицы видно, что амплитуда колебаний равна 15 мм. Следовательно, максимальное отклонение в противоположную сторону составляет –15 мм. Расстояние между двумя максимальными отклонениями от положения равновесия шарика равно половине периода колебаний. Этим значения в таблице соответствует время 1 и 3 секунды соответственно. Следовательно, разница между ними — половина периода. Тогда период будет равен удвоенной разнице во времени:
T=2(t2−t1)=2(3−1)=4 (с)
Ответ: г
pазбирался: Алиса Никитина | обсудить разбор
Задание EF17539
Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остается растянутой. Как ведут себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вверх к положению равновесия?
Для каждой величины определите соответствующий характер изменения:
| 1) | увеличивается |
| 2) | уменьшается |
| 3) | не изменяется |
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.

Алгоритм решения
1.Вспомнить, от чего зависит потенциальная энергия пружины, и установить, как она меняется, когда она поднимает груз в поле тяжести земли к положению равновесия.
2.Вспомнить, от чего зависит кинетическая энергия тел, и установить, как она меняется в рассматриваемый промежуток времени.
3.Вспомнить, от чего зависит потенциальная энергия тел, и установить, как она меняется относительно земли.
Решение
Потенциальная энергия пружины определяется формулой:
Wp=kx22
где k — коэффициент жесткости пружины, а x — ее удлинение. Величина x была максимальной в нижней точке траектории. Когда пружина начинает сжиматься, она уменьшается. Так как потенциальная энергия зависит от квадрата x прямо пропорционально, то при уменьшении этой величины потенциальная энергия пружины тоже уменьшается.
Кинетическая энергия тела определяется формулой:
Wk=mv22
В нижней точке траектории скорость шарика была равна нулю. Но к этому времени потенциальная энергия пружины достигла максимума. Она начинает с ускорением поднимать шарик вверх, сжимаясь. Следовательно, скорость растет. Так как кинетическая энергия зависит от квадрата скорости тела прямо пропорционально, то при увеличении скорости этой величины кинетическая энергия шарика тоже увеличивается.
Потенциальная энергия тел в поле тяжести земли определяется формулой:
Wp=mgh
Масса и ускорение свободного падения шарика — постоянные величины. Следовательно, потенциальная энергия зависит только от расстояния до поверхности земли. Когда пружина поднимает шарик, расстояние между ним и землей увеличивается. Так как потенциальная энергия зависит от расстояния прямо пропорционально, то при его увеличении потенциальная энергия шарика тоже растет.
Ответ: 211
pазбирался: Алиса Никитина | обсудить разбор
Задание EF18835
В таблице представлены данные о положении шарика, прикреплённого к пружине и колеблющегося вдоль горизонтальной оси Ох, в различные моменты времени.

Из приведённого ниже списка выберите два правильных утверждения и укажите их номера.
Ответ:
А) Потенциальная энергия пружины в момент времени 1,0 с максимальна.
Б) Период колебаний шарика равен 4,0 с.
В) Кинетическая энергия шарика в момент времени 2,0 с минимальна.
Г) Амплитуда колебаний шарика равна 30 мм.
Д) Полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна.
Алгоритм решения
- Проверить истинность каждого утверждения.
- Выбрать 2 верных утверждения.
Решение
Согласно утверждению «А», потенциальная энергия пружины в момент времени 1,0 с максимальна. Потенциальная энергия пружины максимальна, когда она отклоняется от положения равновесия на максимальную возможную величину. Из таблицы видно, что в данный момент времени ее отклонение составило 15 мм, что соответствует амплитуде колебаний (наибольшему отклонению от положения равновесия). Следовательно, утверждение «А» — верно.
Согласно утверждению «Б», период колебаний шарика равен 4,0 с. Один период колебаний включает в себя 4 фазы. В течение каждой фазы шарик на пружине проделывает путь, равный амплитуде. Следовательно, мы можем найти период колебаний, умножив время одной фазы на 4. В момент времени t = 0 с, шарик находился в положении равновесия. Первый раз он отклонился на максимальную величину (15 мм) в момент времени t = 1,0 с. Значит, период колебаний равен 1∙4 = 4 с. Следовательно, утверждение «Б» — верно.
Согласно утверждению «В», кинетическая энергия шарика в момент времени 2,0 с минимальна. В этот момент времени, согласно данным таблицы, шарик проходит положение равновесия. В этом положении скорость шарика всегда максимальна. Поэтому кинетическая энергия, которая зависит от квадрата скорости прямо пропорционально, минимальной быть не может. Следовательно, утверждение «В» — неверно.
Согласно утверждению «Г», амплитуда колебаний шарика равна 30 мм. Амплитуда колебаний — есть расстояние от положения равновесия до точки максимального отклонения шарика. В данном случае оно равно 15 мм. Следовательно, утверждение «Г» — неверно.
Согласно утверждению «Д», полная механическая энергия маятника, состоящего из шарика и пружины, в момент времени 3,0 с минимальна. Полная механическая энергия колебательной системы — это совокупность кинетической и потенциальной энергий. И при отсутствии сил трения она остается величиной постоянной. Она лишь превращается из одного вида энергии в другую. Следовательно, утверждение «Д» — неверно.
Ответ: АБ
pазбирался: Алиса Никитина | обсудить разбор
Алиса Никитина | Просмотров: 9k
КОЛЕБАНИЯ И ВОЛНЫ
Колебания
Механические колебания — периодически повторяющиеся изменения положения тела (материальной точки) относительно положения равновесия.
Амплитуда  — максимальное отклонение тела от положения равновесия.
— максимальное отклонение тела от положения равновесия.
Период  — время за которое совершается одно полное колебание. Единица измерения секунда (с).
— время за которое совершается одно полное колебание. Единица измерения секунда (с).
Частота  — количество колебаний
— количество колебаний  в единицу времени
в единицу времени  . Измеряется частота в герцах (Гц) показывающих количество колебаний за секунду. К примеру величина 50 Гц говорит нам о том, что система за одну секунду совершила 50 колебаний.
. Измеряется частота в герцах (Гц) показывающих количество колебаний за секунду. К примеру величина 50 Гц говорит нам о том, что система за одну секунду совершила 50 колебаний.
![[nu=frac{N}{t}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-62fbcbbd3711751932d3830b67c73d3b_l3.png "Rendered by QuickLaTeX.com")
Так как период это время за которое совершается одно полное колебание, можно выразить частоту следующим образом:
![[nu=frac{1}{T}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-2fa064df719014451b937ed7b5115efd_l3.png "Rendered by QuickLaTeX.com")
Гармонические колебания — колебания происходящие по законам синуса или косинуса (гармоническому закону).
![[x(t)=A sin{(omega t + varphi_0)}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-fb56a73574a8623a8b9edb3d00114d46_l3.png "Rendered by QuickLaTeX.com")
Фаза колебания ( ) — аргумент периодической функции, описывающей колебательный или волновой процесс.
) — аргумент периодической функции, описывающей колебательный или волновой процесс.
Начальная фаза колебания  — значение фазы колебаний в начальный момент времени, т.е. при t = 0.
— значение фазы колебаний в начальный момент времени, т.е. при t = 0.
Циклическая частота  — скалярная физическая величина, мера частоты вращательного или колебательного движения. Единица измерения радиан в секунду (рад/с).
— скалярная физическая величина, мера частоты вращательного или колебательного движения. Единица измерения радиан в секунду (рад/с).
![[omega=frac{2pi}{T}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-a87c0a3810ffbcc9d9c2466d78bea1dd_l3.png "Rendered by QuickLaTeX.com")
![[omega=2pi nu]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-f2aeb572929310326ae4a960b497989d_l3.png "Rendered by QuickLaTeX.com")
Исходя из этого можно записать
![[x(t)=A sin{(frac{2pi t}{T} + varphi_0)}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-a9dc9ece1808032ba166b95b902ed0e2_l3.png "Rendered by QuickLaTeX.com")
![[x(t)=A sin{(2pi nu t + varphi_0)}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-44e2bac454485007f4d4dbad3052f07b_l3.png "Rendered by QuickLaTeX.com")
Свободные колебания — колебания возникающие за счет внутренних сил системы, после того как она была выведена из состояния равновесия.
Собственные частота колебаний — частота свободных колебаний колебательной системы.
Затухающие колебания — колебания в которых происходит постепенное уменьшение амплитуды в результате действия сил сопротивления движению (силы трения, силы сопротивления воздуха..).
Вынужденные колебания — колебания, происходящие под действием внешних периодически изменяющейся сил.
Резонанс — резкое увеличение амплитуды колебания при совпадении собственной частоты колебательной системы, с частотой вынуждающей силы.
Математический маятник
Математический маятник — механическая колебательная система представляющая из себя материальную точку подвешенную на нерастяжимой невесомой нити в поле силы тяжести.
Формула Гюгенса для определения периода колебаний математического маятника. l — длинна маятника.
![[T=2pi sqrt{frac{l}{g}}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-29425af3eec4256686ccf44fde46b3ca_l3.png "Rendered by QuickLaTeX.com")
Циклическая частота колебаний математического маятника.
![[omega=sqrt{frac{g}{l}}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-0bfe06ed6b704e4c7099c7f72048003f_l3.png "Rendered by QuickLaTeX.com")
Пружинный маятник
Пружинный маятник — механическая колебательная система представляющая из себя пружину жесткостью  , с материальной точкой массой
, с материальной точкой массой  на одном конце этой пружины.
на одном конце этой пружины.
![[T=2pi sqrt{frac{m}{k}}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-16e132bf91fb59cd894b34f1e11eb60a_l3.png "Rendered by QuickLaTeX.com")
![[omega=sqrt{frac{k}{m}}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-4bfc6e95605efdefbed401ba1cb2c43d_l3.png "Rendered by QuickLaTeX.com")
Колебательный контур
Электромагнитные колебания — периодические изменения напряжённости и магнитной индукции.
Колебательный контур — электрическая цепь, состоящая из конденсатора ёмкостью  и катушки индуктивностью
и катушки индуктивностью  . В этой цепи происходят свободные электромагнитные колебания.
. В этой цепи происходят свободные электромагнитные колебания.
Циклическая частота и период собственных колебаний контура определяются по формуле Томсона:
![[T=2pi sqrt{LC}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-5555d27863fd7c1d726a6a640b5c1c16_l3.png "Rendered by QuickLaTeX.com")
![[omega=frac{1}{sqrt{LC}}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-b3089fa91fd5df56d250ed66dad304e8_l3.png "Rendered by QuickLaTeX.com")
Связь между амплитудными (максимальными) значениями тока в контуре и заряда на конденсаторе:
![[I_{max}=omega q_{max}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-8c61546f50cdcb32211adf74fd31e34d_l3.png "Rendered by QuickLaTeX.com")
Энергия контура:
![[W=frac{q^2}{2C}+frac{LI^2}{2}=frac{q^2_{max}}{2C}=frac{LI^2_{max}}{2}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-7be717606195c86af9d97ee0c45a58b3_l3.png "Rendered by QuickLaTeX.com")
Связь между амплитудными (максимальными) значениями тока и напряжения в контуре (закон сохранения энергии в колебательном контуре):
![[frac{LI^2_{max}}{2}=frac{CU^2_{max}}{2}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-ebb842269b9b0d36723786e2a1357e89_l3.png "Rendered by QuickLaTeX.com")
Переменный ток
Переменный ток — электрический ток периодически меняющий свое направление.
Действующее значение силы переменного тока  равно силе постоянного тока, выделяющего в проводнике то же количество теплоты, что и переменный ток за то же время.
равно силе постоянного тока, выделяющего в проводнике то же количество теплоты, что и переменный ток за то же время.
![[I_d=frac{I_{max}}{sqrt{2}}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-867e161278524c032864fa2b7b96f73b_l3.png "Rendered by QuickLaTeX.com")
Действующее значение напряжения  в цепи переменного тока равно напряжению постоянного тока, выделяющего в проводнике то же количество теплоты, что и переменный ток за то же время.
в цепи переменного тока равно напряжению постоянного тока, выделяющего в проводнике то же количество теплоты, что и переменный ток за то же время.
![[U_d=frac{U_{max}}{sqrt{2}}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-8d521752d9a649c6d2742730a00c1cdc_l3.png "Rendered by QuickLaTeX.com")
Средняя по времени тепловая мощность переменного тока:
![[P=frac{U_{max}I_{max}}{2}=I_d^2 R=frac{U_d^2}{R}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-240280f5f035e02d944e8e98d8f48805_l3.png "Rendered by QuickLaTeX.com")
Емкостное сопротивление  — сопротивление конденсатора в цепи переменного тока. Емкостное сопротивление зависит от частоты переменного тока, чем частота выше, тем сопротивление ниже. Для постоянного тока конденсатор по сути представляет разрыв цепи, по этому для постоянного тока емкостное сопротивление стремиться к бесконечности.
— сопротивление конденсатора в цепи переменного тока. Емкостное сопротивление зависит от частоты переменного тока, чем частота выше, тем сопротивление ниже. Для постоянного тока конденсатор по сути представляет разрыв цепи, по этому для постоянного тока емкостное сопротивление стремиться к бесконечности.
![[X_C=frac{1}{omega C}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-d5d18622ed3b0db5d93251b124a4958e_l3.png "Rendered by QuickLaTeX.com")
Где циклическая частота переменного тока.
Закон Ома для участков цепи, содержащих емкость:
![[I=frac{U}{X_C}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-06aaa2456a195167e723c40bc33c9533_l3.png "Rendered by QuickLaTeX.com")
Индуктивное сопротивление  — сопротивление катушки индуктивности в цепи переменного тока. Так как изменение тока в цепи приводит к появлению токов самоиндукции противодействующих этому изменению, то увеличение частоты переменного тока приводит к увеличению индукционного сопротивления.
— сопротивление катушки индуктивности в цепи переменного тока. Так как изменение тока в цепи приводит к появлению токов самоиндукции противодействующих этому изменению, то увеличение частоты переменного тока приводит к увеличению индукционного сопротивления.
![[X_L=omega L]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-e6e99791124a058d5d20c65c11daacff_l3.png "Rendered by QuickLaTeX.com")
Закон Ома для участков цепи, содержащих индуктивность:
![[I=frac{U}{X_L}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-62306a3b7602fd2438d40baeab722c59_l3.png "Rendered by QuickLaTeX.com")
Трансформатор
Трансформатор — электромагнитное устройство, которое используется для передачи и преобразования электрической энергии из одной катушки индуктивности на сердечнике в другую. Частота переменного тока при этом не меняется.
Идеальный трансформатор — трансформатор в котором энергетические потери пренебрежимо малы.
Отношение напряжений на вторичной  и первичной
и первичной  обмотках идеального трансформатора равно отношению количеств их витков. (
обмотках идеального трансформатора равно отношению количеств их витков. ( на вторичной и
на вторичной и  первичной). Само это соотношение называют коэффициентом трансформации .
первичной). Само это соотношение называют коэффициентом трансформации .
![[frac{U_1}{U_2}=frac{N_1}{N_2}=k]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-944690534dc0ee19e63b62342301fc78_l3.png "Rendered by QuickLaTeX.com")
Если коэффициент трансформации больше единицы, то трансформатор называется понижающим, если меньше, то повышающим.
Закон сохранения энергии для идеального трансформатора:
![[U_1I_1=U_2I_2]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-b8f17b381dc6b8b7616e8533a00a2269_l3.png "Rendered by QuickLaTeX.com")
КПД неидеального трансформатора:
![[eta=frac{U_2I_2}{U_1I_1}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-2b75da971abbe025109a12c432dc05d9_l3.png "Rendered by QuickLaTeX.com")
Волны
Волны — колебания распространяющийся в упругих средах. Если направление распространения волн и направление колеблющихся частиц среды совпадают то такие волны называются продольными. А если эти направления перпендикулярны друг другу, то такие волны называют поперечными.
Так как волновые процессы являются часным случаем колебательного движения, они так же будут характеризоваться своими частотой и периодом. Но помимо этого у волн есть еще свои дополнительные характеристики, отличающие их от обычного колебательного движения.
Длина волны  — расстояние, на которое успевает распространиться волна за один период;
— расстояние, на которое успевает распространиться волна за один период;
Скорость распространения волны  — отношение длинны волны к периоду ее колебания.
— отношение длинны волны к периоду ее колебания.
![[upsilon =frac{lambda}{T}]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-14ae26d32458dd2959767995e37de7e3_l3.png "Rendered by QuickLaTeX.com")
![[upsilon =lambda nu]](https://newtonov.ru/wp-content/ql-cache/quicklatex.com-58706d2ae4577dd568a20c3ceeae9e85_l3.png "Rendered by QuickLaTeX.com")
Звуковые волны — разновидность механических волн в слышимом для человека диапазоне ( от 16 Гц до 20 кГц).