Механические и физические приложения поверхностного интеграла первого рода
Масса поверхности
Пусть на поверхности $sigma $ распределена масса с поверхностной плотностью $mu (mathbf { textit { x } } $,$mathbf { textit { y } } $,$mathbf { textit { z } } )$. Тогда масса $mathbf { textit { m } } $ поверхности равна
$mathbf { textit { m } } =iintlimits_sigma { mu (x,y,z)dsigma } $.
Статические моменты и центр масс
Статические моменты поверхности относительно координатных плоскостей $mathbf { textit { OYZ } } $, $mathbf { textit { OXZ } } $, $mathbf { textit { OXY } } $ равны соответственно $M_ { yz } =iintlimits_sigma { xmu dsigma } , M_ { xz } =iintlimits_sigma { ymu dsigma } , M_ { xy } =iintlimits_sigma { zmu dsigma } $
Координаты центра масс поверхности
$sigma $ равны $mathbf { textit { x } } _ { c } =frac { M_ { yz } } { m } $, $mathbf { textit { y } } _ { c } =frac { M_ { xz } } { m } $, $mathbf { textit { z } } _ { c } =frac { M_ { xy } } { m } $.
Моменты инерции
Момент инерции поверхности $sigma $ относительно прямой $mathbf { textit { L } } $ равен $mathbf { textit { I } } _ { L } =iintlimits_sigma { r_L^2 mu dsigma } $, где $r_L =mathbf { textit { r } } _ { L } (mathbf { textit { x } } ,mathbf { textit { y } } ,mathbf { textit { z } } )$ — расстояние от точки { $mathbf { textit { x } } ,mathbf { textit { y } } ,mathbf { textit { z } } $ } , лежащей на поверхности $sigma $, до прямой $mathbf { textit { L } } $. В частности, моменты инерции относительно координатных осей $mathbf { textit { OX } } ,mathbf { textit { OY } } $, $mathbf { textit { OZ } } $ равны
$I_x =iintlimits_sigma { (y^2+z^2)mu dsigma } $,
$I_y =iintlimits_sigma { (x^2+z^2)mu dsigma } $,
$I_z =iintlimits_sigma { (x^2+y^2)mu dsigma } $.
Момент инерции относительно точки $mathbf { textit { P } } (mathbf { textit { x } } _ { 0 } $,$mathbf { textit { y } } _ { 0 } $,$mathbf { textit { z } } _ { 0 } )$ равен $ I_p =iintlimits_sigma { ((x-x_0 )^2+(y-y_0 )^2+(z-z_0 )^2)mu (x,y,z)dsigma } $
Момент инерции относительно начала координат равен $ I_0 =iintlimits_sigma { (x^2+y^2+z^2)mu (x,y,z)dsigma =frac { 1 } { 2 } (I_x +I_y +I_z ). } $
Пример 1
Найти координаты центра масс полусферы $mathbf { textit { x } } ^ { 2 } +mathbf { textit { y } } ^ { 2 } +mathbf { textit { z } } ^ { 2 } =mathbf { textit { R } } ^ { 2 } ,mathbf { textit { z } } leqslant 0$, если поверхностная плотность в каждой точке сферы равна расстоянию от этой точки до оси $mathbf { textit { OZ } } $.
Решение
Масса полусферы $sigma $ равна
$ begin{array} { l } M=iintlimits_sigma { mu dsigma =iintlimits_sigma { sqrt { x^2+y^2 } dsigma = } } iintlimits_ { x^2+y^2leqslant R^2 } { sqrt { x^2+y^2 } cdot sqrt { 1+((sqrt { R^2-x^2-y^2 } { ) } ‘_x )^2+((sqrt { R^2-x^2-y^2 } { ) } ‘_y )^2 } } dxdy= \ =iintlimits_ { x^2+y^2leqslant R^2 } { sqrt { x^2+y^2 } cdot sqrt { 1+frac { x^2+y^2 } { R^2-x^2-y^2 } } dxdy= } iintlimits_ { x^2+y^2leqslant R^2 } { sqrt { x^2+y^2 } cdot frac { Rdxdy } { sqrt { R^2-x^2-y^2 } } =Rintlimits_0^ { 2pi } { dvarphi } intlimits_0^R { frac { r^2dr } { sqrt { R^2-r^2 } } = } } \ =2pi Rintlimits_0^R { frac { r^2-R^2+R^2 } { sqrt { R^2-r^2 } } dr=2pi Rleft( { R^2arcsin left. { frac { r } { R } }right|_0^R -intlimits_0^R { sqrt { R^2-r^2 } } dr }right)=frac { pi ^2R^3 } { 2 } . } \ end{array} $
{ Мы воспользовались тем, что интеграл $intlimits_0^R { sqrt { R^2-r^2 } dr } $ равен четверти площади круга радиуса $mathbf { textit { R } } $ , т.е. $frac { pi R^2 } { 4 } $ } .
Пример 2
Найти массу поверхности $G:left { { { begin{array} { * { 20 } c } { x^2+y^2+z^2=16 } hfill \ { ygeqslant 0 } hfill \ { 0leqslant zleqslant 3 } hfill \ end{array} } }right.$ с поверхностной плотностью $gamma = 2z^ { 2 } + 3$.
Решение
На рассматриваемой поверхности $z=sqrt { 16-x^2-y^2 } $,
$frac { partial z } { partial x } =-frac { x } { sqrt { 16-x^2-y^2 } } ,frac { partial z } { partial y } =-frac { y } { sqrt { 16-x^2-y^2 } } .$ Тогда
$ dS=sqrt { 1+frac { x^2 } { 16-x^2-y^2 } +frac { x^2 } { 16-x^2-y^2 } } dxdy=frac { 4 } { sqrt { 16-x^2-y^2 } } dxdy. $
Проекцией $D$ этой поверхности на координатную плоскость $Oxy$ является полукольцо с границами в виде дуг концентрических окружностей радиусов 3 и 4.
Применяя формулу массы поверхности и перехода к полярным координатам, получим:
$ begin{array} { c } M=4iintlimits_D { frac { 2(16-x^2-y^2)+3 } { sqrt { 16-x^2-y^2 } } } dxdy=4intlimits_0^pi { dvarphi } intlimits_3^4 { frac { 2(16-rho ^2)+3 } { sqrt { 16-rho ^2 } } } rho drho = \ =4pi left( { -frac { 1 } { 2 } }right)intlimits_7^0 { frac { 2t+3 } { sqrt t } } dt=2pi intlimits_0^7 { left( { 2t^ { frac { 1 } { 2 } } +3t^ { -frac { 1 } { 2 } } }right) } dt=2pi left( { frac { 4 } { 3 } t^ { frac { 3 } { 2 } } +6t^ { frac { 1 } { 2 } } }right)left| { { begin{array} { * { 20 } c } { ^7 } hfill \ { _0 } hfill \ end{array} } }right.= \ =2pi left( { frac { 28 } { 3 } sqrt 7 +6sqrt 7 }right)=frac { 92sqrt 7 } { 3 } pi . \ end{array} $
Андрей Геннадьевич Блохин
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Сущность понятия «центр масс»
Понятие «центр масс» широко используется в физике для решения задач, связанных с движением тел. Например, математический маятник удобно представить себе как подвешенное на нити тело, вся масса которого сконцентрирована в единой точке. В законе всемирного тяготения тоже речь идет о расстоянии не между телами, а между центрами тел, под каковыми подразумеваются именно центры масс, а не геометрические центры.
Определение 1
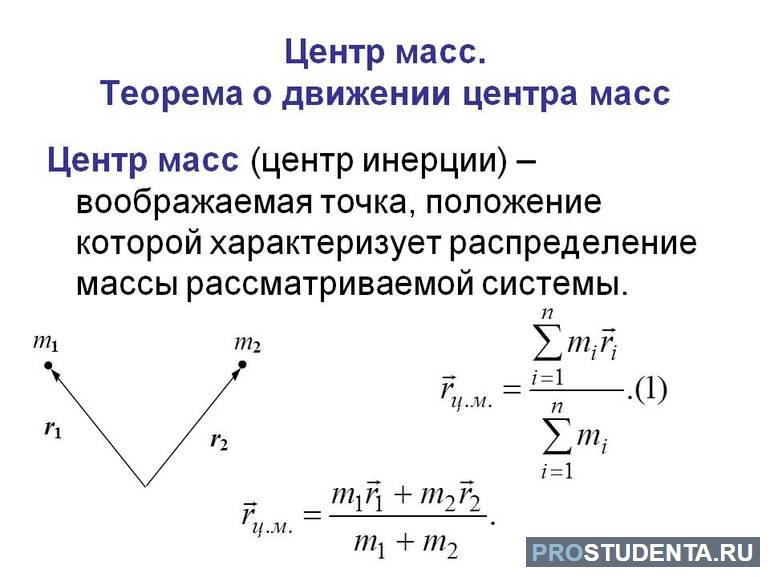
Центр масс — точка, характеризующая размещение и движение исследуемой системы как единого целого.
Признаком центра масс является то, что если тело подвесить, закрепив за эту точку, оно останется в покое, т.е. не будет раскачиваться или вращаться относительно этого центра. В простейшем случае, если речь идет о симметричном теле с равномерной плотностью, центр масс находится на пересечении осей симметрии рассматриваемого тела. Например, если взять линейку длиной 30 см, то ее центр масс будет расположен на отметке «15 см». Подложив карандаш под эту отметку, легко привести линейку в положение равновесия.
На практике далеко не все тела, центр масс которых нужно найти, являются симметричными и однородными по плотности. Более того, многие исследуемые объекты представляют собой системы из нескольких тел с различными геометрическими и химическими характеристиками. Для расчетов их разбивают на элементарные фрагменты и производят вычисления поэтапно.
Нахождение координат центра масс
Определение 2
Центр масс двух тел с точечными массами $m_1$ и $m_2$ и координатами на координатной прямой $x_1$ и $x_2$ находится в точке, делящей расстояние между этими телами на отрезки с длинами обратно пропорциональными массам рассматриваемых тел.
Отсюда следует, что чем массивнее тело в такой элементарной системе, тем ближе оно к общему центру масс.
Расстояние между точечными телами равно:
$Delta x = x_2 — x_1$
Пропорция между массами и расстояниями, согласно определению:
$frac{l_1}{l_2} = frac{m_2}{m_1}$,
«Как найти координаты центра масс» 👇
где $l_1$, $l_2$ — расстояния от соответствующих тел до центра масс.
Выразив, длины через координаты
$l_1 = x_c — x_1; l_2 = x_2 — x_c$,
центр масс можно определить как
$x_c = frac{m_1 cdot x_1 + m_2 cdot x_2}{m_1 + m_2}$.
где $x_c$ — координата центра тяжести.
Разложив любую сложную систему на множество элементарных тел с точечными массами, можно обобщить изложенный принцип в виде формулы (для оси абсцисс):
$x_c = frac{sumlimits^N_{i=1}{m_i cdot x_i}}{sumlimits^N_{i=1}{m_i}}$
В большинстве случаев центр масс требуется найти не на координатной прямой, а в двух- или трехмерной системе координат. Для дополнительных осей координаты центра масс ($y_c$, $z_c$) находят по аналогичному принципу.
Замечание 1
Центр тяжести системы тел представляет собой точку, подобную центру масс, но рассчитывается не для масс, а для весов (обусловленных гравитацией сил), действующих на точечные тела, входящие в систему. Центр тяжести определяется так же, как и центр масс, если размеры системы малы в сравнении с радиусом планеты Земля. Он в большинстве случаев с достаточной для практики точностью совпадает с центром масс рассматриваемой системы.
Пример 1
Найти центр масс двух линеек, изготовленных из одинакового материала, одинаковой толщины и ширины, левые концы линеек совмещены. Длины линеек — 10 и 30 см. Толщиной линеек можно пренебречь.
Поскольку толщиной можно пренебречь, найти нужно лишь координату центра масс по оси $x$.
Разобьем мысленно систему на два отрезка. Первый — где толщина линеек складывается. Его координаты — $[0, 10]$. Второй отрезок — где длинная линейка продолжается одна. Его координаты — $[10, 30]$. Примем за единицу измерения массу одного погонного сантиметра линейки. Тогда масса второго фрагмента:
$m_2 = 30 — 10 = 20$
На каждый сантиметр первого фрагмента приходится вдвое больше массы, поскольку там сложены две линейки:
$m_1 = 10 cdot 2 = 20$
Центры масс отрезков находятся на их осях симметрии, т.е. на середине длины каждого:
$x_{c1} = frac{10}{2} = 5$;
$x_{c2} = 10 + frac{20}{2} = 20$
Подставим значения в формулу:
$x_c = frac{m_1 cdot x_1 + m_2 cdot x_2}{m_1 + m_2}$
$x_c = frac{20 cdot 5 + 20 cdot 20}{20 +20} = frac{100 + 400}{40} = 12, 5$
Ответ: центр масс находится на расстоянии 12,5 см от левого конца системы линеек.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Точку, в которой происходит равное распределение величины, определяющей инерционные и гравитационные свойства, называют центром масс. Формула для определения параметра зависит от радиус-вектора частиц системы и их полной энергии. Эту характеристику тела отличают от тяжести, при этом в трудах советских учёных Ландау, Лифшица для неё используется термин «центр инерции».
Оглавление:
- Общие сведения
- Связь с центром тяжести
- Вычисление положения
- Геометрический способ определения
Общие сведения
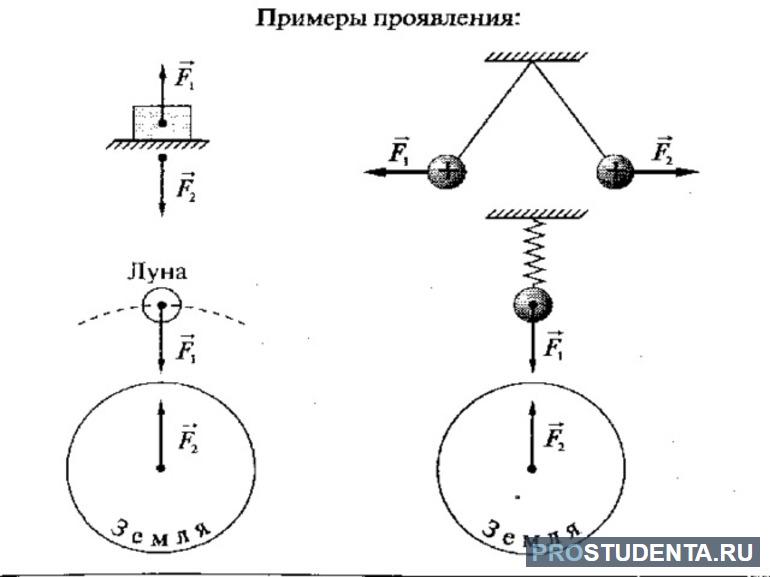
Допустим, имеется тело, на которое действуют скомпенсированные силы. В этом случае оно будет в состоянии покоя или прямолинейного равномерного движения. Пусть тело будет неподвижным. Например, лодка на воде. К ней можно приложить воздействие F1 в районе её кормы. Под действием силы она начнёт разворачиваться. Аналогично если воздействовать на её нос F2, то она тоже будет поворачиваться, но при этом разворот будет происходить в другую сторону.
Получается, что можно подобрать такую линию, на которой действие сил приведёт её к ускоренно поступательному движению. Пусть это будет F3. На самом деле таких сил может быть несколько. При этом их можно перемещать вдоль линии их воздействия. Если все такие силы изобразить в виде линий, то они пересекутся в одной точке. Такое место и называют центром масс тела (ЦМ). То есть точку, в которой пересекаются линии действия сил, вызывающие только ускоренное поступательное механическое движение.
Эта важная точка в теле и движется она довольно просто. Перемещение любого тела можно представить, как комбинацию двух видов движения:
- центра масс;
- вращения.
Существует теорема: ЦМ тела движется так, как перемещалась бы материальная точка, в которой сосредоточена вся масса и к которой приложены все воздействия, действующие на объект. Таким образом, различные виды изменения положения точек в пространстве можно описать с помощью законов Ньютона. Согласно же теореме их можно применять и к телу, если считать, что все силы приложены к центру масс.
Рассматривая объект, можно не учитывать его размер, форму, а брать во внимание только инерцию, ускорение и принцип парного взаимодействия. Фактически в механике перемещение сколь угодно сложного вида рассматривается по принципу суперпозиции и закона сохранении энергии. При этом довольно удобно изучать изменение положения в системе отсчёта связанной с этим центром. В ней полный импульс всегда будет равным нулю, что позволяет упростить уравнение движения.
Связь с центром тяжести
Пусть имеется объект, находящийся на Земле. Говорят, что на него действует сила тяжести. Но на самом деле она воздействует не на вещество, а на каждый его атом, частичку. Если предположить, что ускорение свободного падения буде одинаковым, то на объект действует очень множество сил тяжести. Рассматривать такую систему неудобно. Поэтому все воздействия заменяют равнодействующей. И считают, что действует одна сила, которая приложена к центру тяжести твёрдого тела.
Для того чтобы найти взаимосвязь между тяжестью и массой нужно представить, что объект вдруг распался на отдельные равные кусочки. Они держатся вместе, но не прикреплены друг к другу. Если тело отпустить, то они будут падать вместе, так как ускорение свободного падения не зависит от массы. При этом движение будет поступательным. Значит, сила, приложенная к телу в целом, будет приложена к центру масс.
Получается, что центральная точка является общей как для тяжести, так и для масс. Это две точки положение которых совпадает несмотря на разный их принцип определения в физике. Но существуют условия, когда это правило не выполняется. Например, если система материальных точек неоднородна по объёму плотности в гравитационном поле, то центры не совпадут.
Для примера можно привести список однородных фигур с указанием их центральной точки:
- отрезок — середина;
- параллелограмм — место пересечения диагоналей;
- треугольник — точка пересечения медиан (центроид);
- любой правильный многоугольник — центр поворотной симметрии;
- полукруг — точка, в которой перпендикулярный радиус делится в отношении 4:3p считая от центра круга.
Чтобы найти координату центра масс объекта, который можно представить, как совокупность связанных материальных точек используют два метода: аналитический и геометрический. Но второй способ не всегда можно применить. В однородном гравитационном поле центры тяжести и масс всегда совпадают. И это часто подтверждается на практике, из-за того, что внешнее гравитационное поле в задачах, связанных с действиями на Земле, считают постоянным в пределах объёма тела.
Поэтому эти термины объединяют в геометрии, статике и так далее. То есть в тех областях, где применение определения можно назвать метафорическим и предполагается ситуация их эквивалентности.
При таком понимании оба термина синонимичны, но при этом чаще предпочитают использовать термин, связанный с тяжестью. Это происходит в силу того, что исторически он появился раньше.
Вычисление положения
Пусть тело представляет собой совокупность материальных точек, лежащих на одной прямой при этом их массы разные. Задача состоит в нахождении его центра. Для этого следует вести систему координат с осью икс, которая будет совпадать с линией расположения точек. При этом тело пусть подвешено на невесомой опоре и находится под действием Земного тяготения. Это условие даёт возможность воспользоваться тем фактом, что положения центров масс и тяжести совпадают.
На каждую из материальных точек действует своя сила: m1g, m2g… mng. Если предоставить это тело самому себе, то оно будет в состоянии свободного падения. Остановить тело — подпереть, но при этом так, чтобы оно находилось в равновесии. Это значит, что сила реакции опоры должна проходить через центр тяжести, так как равнодействующая тоже её пересекает.
Получится, что сила реакции опоры будет лежать на одной прямой с силой тяжести действующей на тело в совокупности и их моменты тоже будут проходить через неё. С помощью координатной оси точкам можно присвоить положение, x1, x2… xn, а ЦМ xц. Чтобы тело находилось в равновесии необходимо выполнение двух условий:
- векторная сумма всех сил должна быть равной нулю: m1g + m2g +…+mng + F = 0;
- сумма моментов равняться нулю: Mm 1 g + Mm 2 g +…+ Mmng + MF = 0.
Из первого условия можно найти силу реакции опоры: F = (m1 + m2 +…+mn) * g. Если вращение выбрать против часовой стрелки, тогда относительно оси все моменты силы тяжести будут отрицательными, а опоры — положительные. Тогда справедливо записать: F * хц = (m1 x 1 + m2 x 2 +…+mn xn) * g.
Из последнего равенства можно выразить координату ЦМ: xц = ((m1 x 1 + m2 x 2 +…+mn xn) * g) / F. В эту формулу можно подставить выражение для F. В результате ускорение свободного падения сократится и получится: xц = (m1 x 1 + m2 x 2 +…+mn xn) / (m1 + m2 +…+mn). Это формула выглядит громоздко, но запомнить её легко. В числителе стоят произведения масс материальных точек на их координаты, а в знаменателе — вес всего тела.
Если точки не будут лежать на одной прямой, то координата ЦМ тоже не изменится. То есть приведённая формула справедлива для любого положения тела относительно координаты y.
При этом её можно применять и для рассмотрения предметов в пространстве, так как все направления в существующем мире равноправные.
Геометрический способ определения
Для простейших симметричных фигур ЦМ можно определить геометрическим методом. Для этого используются свойства диагоналей и медиан. Пусть имеется произвольной формы четырёхугольник. Изготовлен он из однородного материала.
Идея вычисления состоит в том, что эту фигуру необходимо разбить на два треугольника. Для этого нужно провести диагональ, которая разделит фигуру на два тела. Затем провести в каждом треугольном теле три медианы. Точка их пересечения и будет ЦМ. В результате вместо четырёхугольника можно рассматривать две материальные точки.
Несмотря на то что масса у них разная ЦМ будет находиться на соединяющем их отрезке. Теперь четырёхугольник можно разбить на два других треугольника и выполнить аналогичные действия уже для них. Получится два отрезка, на которых одновременно расположен ЦМ. Значит, его положение будет определяться точкой их пересечения.
Для более сложной фигуры, например, шести или восьмиугольника можно использовать такой же подход. Сначала нужно разделить тело на прямоугольники, а затем треугольники. Найти ЦМ для полученных фигур и определить точку пересечения. Следует понимать, что ЦМ может находиться и за пределами объекта.
Но в реальных ситуациях бывают фигуры, которые имеют неправильную форму. Для них нельзя применить расчёт или геометрический метод. Поэтому выясняют, где расположен ЦМ экспериментальным путём.
Например, пусть имеется тело сложной неправильной формы. Чтобы найти ЦМ необходимо фигуру подвесить в пространстве. На неё действует две силы: тяжести и реакции оси. Первая заставляет фигуру поворачиваться с определённой скоростью до тех пор, пока момент силы тяжести относительно оси крепления не станет равным нулю. То есть точка опоры, ось и центр тяжести окажутся на одной вертикале.
Чтобы узнать, где же находится ЦМ, тело нужно подвесить, используя другую точку. При этом на самой фигуре следует отметить, как проходит вертикаль.
Повторяя такой опыт минимум три раза, можно увидеть точку пересечения осей, которая и будет искомым ЦМ. Причём чем будет больше экспериментов, тем точнее он будет определён.
2018-01-21 ![]()
Определите положение центра масс однородного полушара радиусом $R$.
Решение:

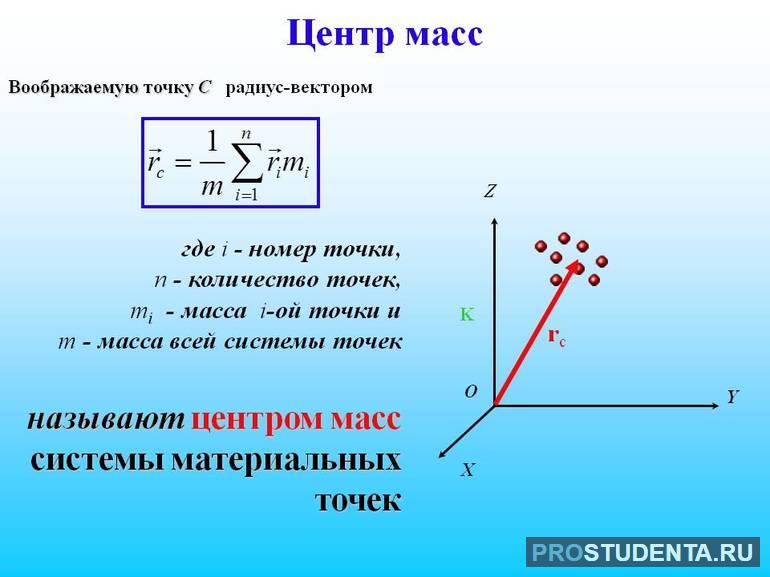
Полушар симметричен относительно оси $x$ (рис.), поэтому его центр масс будет находиться на этой оси:
$r_{c} = x_{c} = frac{ sum_{i} Delta m_{i} x_{i}}{m}$, где $Delta m_{i}$ — элемент массы в виде диска радиусом $y$ и толщиной $Delta x$. Так как полушар сплошной, то от суммировании необходимо перейти к интегрированию, тогда $x_{c} = frac{ int_{0}^{R} xdm}{m}$.
$dm = rho dV = rho pi y^{2} dx; y^{2} = R^{2} — x^{2}; dm = rho pi (R^{2} — x^{2})dx$;
$rho$ — плотность материала полушара, $dV$ — элемент объема (диск). Масса полушара $m = frac{4}{6} pi R^{3} rho$, отсюда
$x_{c} = frac{6}{4 pi R^{3} rho } int_{0}^{R} rho pi (R^{2} — x^{2}) xdx = frac{3}{8}R$.
We calculate the centre of mass of a half-ball of radius $1$. Without loss of generality we may assume that the ball is made of material with density $1$.
Imagine that the ball is sitting on a table, flat side down. By symmetry the centre of mass is on the vertical line through the centre of the ball. The only question is: How far up?
We will calculate the moment of the ball about the plane of the table, and divide by the mass of the half-ball. By a standard formula, the mass of the half-ball is $dfrac{2pi}{3}$.
Imagine now that the half-ball is an industrial ham. Imagine a very thin slice of that ham, sliced parallel to the table, but left in place. Let the slice be taken from height $z$ to height $z+dz$, where $dz$ is extremely small. The slice is almost a cylinder of very small height $dz$.
We first calculate the radius $r=r(z)$ of the slice. By the Pythagorean Theorem, we have $r^2+z^2=1$, so $r=sqrt{1-z^2}$.
Thus the area of the slice is $pi r^2=pi(1-z^2)$. The thickness is $dz$, so the volume, and therefore the mass, of the slice is approximately $pi (1-z^2),dz$.
The slice is at perpendicular distance $z$ from the table. So the moment of the slice about the plane of the table is approximately $pi (1-z^2)(z),dz$.
«Add up» (integrate) from $z=0$ and $z=1$. The full moment of the ball is
$$int_0^1 pi (1-z^2)(z),dz.$$
Calculate. We get $dfrac{pi}{4}$.
Finally, divide by the mass $dfrac{2pi}{3}$. We get $dfrac{3}{8}$.
For a ball of radius $R$, just multiply by $R$. The centre of mass is $dfrac{3 R}{8}$ above the centre of the half-ball.