-
Радиус, центр и круг кривизны. Эволюта и эвольвента
Радиусом
кривизны называется величина, обратная
кривизне, т. е.
![]()
.
Если
плоская кривая отнесена к прямоугольной
системе координат и задана уравнением
,
то радиус кривизны
![]()
выражается формулой

.
Eсли
плоская кривая отнесена к прямоугольной
системе координат и задана параметрически
системой уравнений
, то радиус кривизны
выражается формулой
,
где
,
![]()
,
,
.
Если
плоская кривая отнесена к полярной
системе координат и задана уравнением
,
то радиус кривизны
выражается формулой

,
где
,
.
Окружностью
кривизны данной линии её точке А
называется
предельное положение окружности,
проходящей через три точки A,
B,
C
кривой, когда
![]()
и
![]()
.
Радиус
окружности кривизны равен радиусу
кривизны. Центр окружности кривизны
называется центром кривизны и находится
на нормали к линии, проведенной в точке
А
в сторону вогнутости этой линии.
Координаты
![]()
и
![]()
центра кривизны линии
вычисляются по формулам:
![]()
,
![]()
.
Эволютой
линии называется множество её центров
кривизны, а сама линия относительно
своей эволюты называется эвольвентой.
Формулы
для координат центра кривизны можно
рассматривать как параметрические
уравнения эволюты, где параметром
является абсцисса х
исходной линии.
Данная
линия может иметь лишь одну эволюту, но
у данной эволюты существует бесконечное
множество эвольвент.
Пример.
Найти
радиус кривизны линии
![]()
в
точке с абсциссой
.
Решение.
Найдем значения производных первого и
второго порядков функции
в точке с абсциссой
:
![]()
,
![]()
.
Подставим
найденные значения
![]()
и
![]()
в
формулу
:
![]()
.
Следовательно,
радиус кривизны
линии
в
точке с абсциссой
![]()
.
Пример.
Найти
радиус кривизны линии
![]()
в
точке
![]()
.
Решение.
Дифференцируя по t,
получим
![]()
,
![]()
,
![]()
,
![]()
.
Вычислим
значения производных в
точке
:
![]()
![]()
![]()
,
![]()
.
Подставляя
найденные значения
![]()
![]()
![]()
,
![]()
в
формулу
,
имеем

Следовательно,
радиус кривизны
линии
в
точке с абсциссой
![]()
Пример.
Найти
радиус кривизны кардиоиды
![]()
в
любой её точке.
Решение.
Найдем
и
:
![]()
![]()
.
Подставим
найденные выражения в формулу
:

Следовательно,
радиус кривизны
кардиоиды
в
любой её точке
![]()
Пример.
Найти
координаты
и
центра кривизны линии
![]()
в
точке
![]()
.
Решение.
Найдем значения производных первого
и второго порядков функции
в точке с абсциссой
:
![]()
,
![]()
.
Подставим
значения
,
![]()
и найденные
значения
![]()
и
в
формулы
,
:
![]()
,
![]()
Следовательно,
координаты
центра кривизны линии
в
точке
![]()
и
![]()
Пример.
Составить
уравнение эволюты кривой
![]()
.
Решение.
Продифференцируем дважды уравнение
параболы:
![]()
;
![]()
.
Так
как
![]()
,
то
.
Найдем
координаты
и
центра кривизны линии ,
предварительно выразив х
из уравнения
:
![]()
.
Имеем
![]()
![]()
—
уравнение эволюты в параметрической
форме. Выразим параметр у
из
![]()
и
:
;

.
Окончательно
получаем,
Следовательно,
уравнение
эволюты кривой
![]()
имеет вид
![]()
(уравнение
полукубической параболы).
Упражнения
1.
Найти радиус кривизны линии
![]()
в
точке A:
а)
![]()
,
A
(
2; 2 ), б)
![]()
,
A
(
0; 1 ) .
2.
Найти радиус кривизны трехлепестковой
розы
![]()
, при
![]()
.
3.
Найти координаты
![]()
и
![]()
центра кривизны линии
в
точке A:
а)
![]()
,
A
(
1; 1 ), б)
![]()
,
A
(
1; 0 ) .
4.
Составить уравнение эволюты кривой
:
а)
,
б)
![]()
.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

Эксперт по предмету «Математика»
Задать вопрос автору статьи
Смысл понятий радиуса, круга и центра кривизны
В технических приложениях часто оказывается удобным использовать окружности для приближенной замены кривой в окрестностях рассматриваемых точек. Это существенно упрощает решение целого ряда задач за счет применения более удобных выражений.
Наиболее употребительными характеристиками любой кривой являются касательная и нормаль. Касательная — предельное положение секущей $MN$ при неограниченном приближении точки $N$ к точке $M$ вдоль кривой. Нормаль — прямая, проходящая через точку касания перпендикулярно касательной.
Уравнение касательной в точке $Mleft(x_{0} ,y_{0} right)$ к кривой $y=fleft(xright)$ имет вид $y-y_{0} =y’left(x_{0} right)cdot left(x-x_{0} right)$, уравнение нормали $y-y_{0} =-frac{1}{y’left(x_{0} right)} cdot left(x-x_{0} right)$.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
Задача 1
Записать уравнения касательной и нормали к кривой $y=3cdot x^{2} -x+2$ в заданной точке $x_{0} =1$.
Значение функции в заданной точке: $y_{0} =yleft(x_{0} right)=yleft(1right)=3cdot 1^{2} -1+2=4$.
Значение производной в заданной точке:
[y’=left(3cdot x^{2} -x+2right)^{{‘} } =6cdot x-1; y’left(x_{0} right)=y’left(1right)=6cdot 1-1=5.]
Уравнение касательной: $y-4=5cdot left(x-1right)$ или $5cdot x-y-1=0$.
Уравнение нормали: $y-4=-frac{1}{5} cdot left(x-1right)$ или $x+5cdot y-21=0$.
Определение
Радиус кривизны — это параметр кривой, значение которого обратно значению кривизны $R=frac{1}{K} $. Следовательно, это такая же переменная величина, как и кривизна.
Если в данной точке $M$ построить нормаль к кривой и отложить на ней в сторону вогнутости кривой отрезок, равный по длине радиусу кривизны кривой в этой точке, то получим точку — центр кривизны. Окружность с центром в полученной точке и радиусом, равным радиусу кривизны — это круг кривизны. Так как данная кривая и её круг кривизны касаются в данной точке, то они имеют в данной точке общую касательную. Кроме того, значения кривизны кривой и круга кривизны в данной точке совпадают.
Важным свойством круга кривизны является то, что он является соприкасающимся кругом, то есть предельным положением круга, проходящего через три точки кривой, стремящимся к совпадению в данной.
Если некоторая точка перемещается вдоль кривой, то и соответствующий ей центр кривизны также описывает некоторую кривую. Геометрическое место центров кривизны данной кривой называется её эволютой. При этом данная кривая по отношению к своей эволюте называется её эвольвентой.
Вычисление радиуса и определение центра круга кривизны
Формулы для радиуса кривизны получить легко, если известны формулы для вычисления кривизны кривой.
При произвольном параметрическом задании кривой $x=xleft(tright)$ и $y=yleft(tright)$ имеем $R=frac{sqrt{left(left(x’_{t} right)^{2} +left(y’_{t} right)^{2} right)^{3} } }{y»_{tt} cdot x’_{t} -x»_{tt} cdot y’_{t} } $.
Если кривая задана в явном виде $y=fleft(xright)$, то $R=frac{sqrt{left(1+left(y’right)^{2} right)^{3} } }{y»} $.
Если кривая задана в полярных координатах $rho =rho left(phi right)$, то $R=frac{sqrt{left(rho ^{2} +left(rho ‘_{phi } right)^{2} right)^{3} } }{rho ^{2} +2cdot left(rho ‘_{phi } right)^{2} -rho cdot rho »_{phi phi } } $.
«Радиус, круг и центр кривизны» 👇
Задача 2
Найти радиус кривизны экспоненты $y=e^{x} $ при $x=0$.
Находим производные: $y’=e^{x} $; $y»=e^{x} $.
По формуле для радиуса кривизны получаем:
[R=frac{sqrt{left(1+left(y’right)^{2} right)^{3} } }{y»} =frac{sqrt{left(1+left(e^{x} right)^{2} right)^{3} } }{e^{x} } =frac{sqrt{left(1+e^{2cdot x} right)^{3} } }{e^{x} } .]
Вычисляем радиус кривизны экспоненты при $x=0$:
[Rleft(0right)=frac{sqrt{left(1+e^{2cdot 0} right)^{3} } }{e^{0} } =2cdot sqrt{2} . ]
Задача 3
Найти радиус кривизны кардиоиды $rho =1+cos phi $.
Находим производные: $rho ‘=-sin phi $; $rho »=-cos phi $.
Вычисляем:
[rho ^{2} +rho ‘^{2} =left(1+cos phi right)^{2} +left(-sin phi right)^{2} =2cdot left(1+cos phi right);]
[rho ^{2} +2cdot rho ‘^{2} -rho cdot rho »=left(1+cos phi right)^{2} +2cdot left(-sin phi right)^{2} -left(1+cos phi right)cdot left(-cos phi right)=]
[=3cdot left(1+cos phi right).]
По формуле для радиуса кривизны получаем:
[R=frac{sqrt{left(rho ^{2} +left(rho ‘_{phi } right)^{2} right)^{3} } }{rho ^{2} +2cdot left(rho ‘_{phi } right)^{2} -rho cdot rho »_{phi phi } } =frac{sqrt{left(2cdot left(1+cos phi right)right)^{3} } }{3cdot left(1+cos phi right)} =frac{2}{3} cdot sqrt{2cdot left(1+cos phi right)} =frac{4}{3} cdot cos frac{phi }{2} .]
Найдем координаты центра кривизны $Pleft(x_{C} ;y_{C} right)$ кривой $y=fleft(xright)$.
Координаты центра кривизны для точки $Mleft(x;yright)$ удовлетворяют уравнению нормали $y_{C} -y=-frac{1}{y’left(xright)} cdot left(x_{C} -xright)$.
Уравнение круга кривизны: $left(x-x_{C} right)^{2} +left(y-y_{C} right)^{2} =R^{2} $.
Решив систему $left{begin{array}{c} {y_{C} -y=-frac{1}{y’left(xright)} cdot left(x_{C} -xright)} \ {left(x-x_{C} right)^{2} +left(y-y_{C} right)^{2} =R^{2} } end{array}right. $, получим искомые координаты центра кривизны: $left{begin{array}{c} {x_{C} =x-frac{y’cdot left(1+y’^{2} right)}{y»} } \ {y_{C} =y+frac{1+y’^{2} }{y»} } end{array}right. $.
Координаты центра кривизны по существу являются параметрическими уравнения эволюты.
Задача 4
Найти эволюту параболы $y=x^{2} $. Результаты представить графически.
Находим производные: $y’=2cdot x$; $y»=2$.
По формулам $left{begin{array}{c} {x_{C} =x-frac{y’cdot left(1+y’^{2} right)}{y»} } \ {y_{C} =y+frac{1+y’^{2} }{y»} } end{array}right. $ находим координаты центра кривизны для произвольной точки $Mleft(x;yright)$.
Получаем:
[x_{C} =x-frac{2cdot xcdot left(1+left(2cdot xright)^{2} right)}{2} =-4cdot x^{3} ;]
[y_{C} =y+frac{1+left(2cdot xright)^{2} }{2} =3cdot x^{2} +frac{1}{2} .]
Полученные выражения фактически представляют собой параметрические уравнения эволюты, в которых $x$ является параметром. Если исключить параметр $x$ из этих уравнений, то может быть получено уравнение вида $Fleft(x_{C} ;y_{C} right)=0$, которое непосредственно связывает координаты эволюты.
Совмещенный график эвольвенты $y=x^{2} $ и её эволюты:
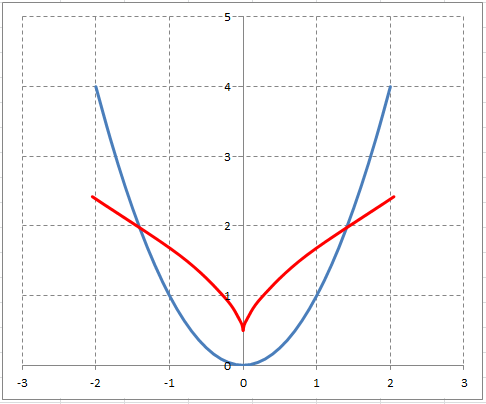
На графике синей линией изображена парабола $y=x^{2} $, а красной линией — её эволюта. Эволюта представляет собой полукубическую параболу.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Пример 3. Найти координаты центра кривизны и построить кривую и круг кривизны кривой:
1) в ее вершине;
2) в точке, где
.
Решение. 1) Данное уравнение определяет параболу, ось которой параллельна оси . Найдем ее вершину как точку, где касательная параллельна оси
, т. е. где
:
при
Далее по формулам

находим координаты центра кривизны данной параболы в ее вершине (2; 4)
и строим параболу и круг кривизны в ее вершине (рис. 82).
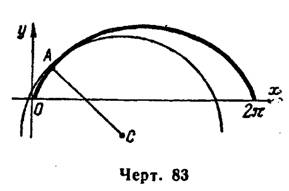
2) Находим производные , их значения при
:
и по формулам (2) координаты центра кривизны
Затем строим данную циклоиду, ее точку , где
, найденный центр кривизны
и круг кривизны (рис. 83).
Пример 4. В каких точках параболы радиус кривизны равен единице?
Решение. Находим производные и по формуле (1)
радиус кривизны параболы в любой ее точке с абсциссой :
Полагая , получим абсциссы искомых точек
$
Пример 5. В какой точке кривая имеет наибольшую кривизну?
Решение. Находим производные и кривизну данной кривой в любой точке:
Далее ищем наибольшее значение функции , которая определена и непрерывна на всей числовой оси:
при
т.е. в единственной точке . Определяя знаки
слева и справа от этой критической точки:

Это параметрические уравнения эволюты. Исключая из них параметр , получим
— уравнение полукубической параболы. Данная парабола и найденная ее эволюта изображены на рис. 84.
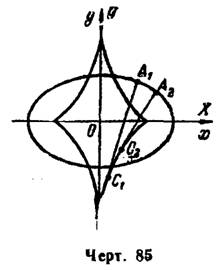
2) Из уравнений эллипса найдем производные и по формулам (2) получим, после упрощений, параметрические уравнения эволюты эллипса
где
Эллипс и его эволюта построены на рис. 85.
Радиусом кривизны данной линии в данной ее точке называется величина К, обратная кривизне к этой линии в рассматриваемой точке:

(15.13) К Уа
На нормали к кривой в точке М отложим отрезок МС = К в сторону вогнутости кривой (рис. 15.14). Точка С называется центром кривизны данной линии в точке М. Окружность радиуса К с центром в точке С называется окружностью кривизны этой линии в точке М. Очевидно, в данной точке М кривизна кривой и кривизна окружности равны между собой.
Координаты центра кривизны определяются формулами










^у+^Чг1- (1514>

У» У

Если кривая задана параметрическими уравнениями х=х(1), У = У(0. то формулы (15.14) с учетом равенств (14.20) и (14.22) примут вид

+ (15.15)
ХУ’-х’У хУ’-х’У
Щ Множество всех центров кривизны дан

Ной линии называется ее эволютой. По отношению к своей эволюте исходная линия называется эвольвентой (или разверткой).

Если линия задана уравнением у = /(х), то уравнения (15.14) можно рассматривать как параметрические уравнения ее эволюты (с параметром х).

В случае параметрического задания кривой уравнения (15.15) являются параметрическими уравнениями эволюты (входящие в правые части этих уравнений величины зависят от параметра I).

| < Предыдущая | Следующая > |
|---|
From Wikipedia, the free encyclopedia
This article is about the general mathematical concept. For its optical applications, see Radius of curvature (optics).

In differential geometry, the radius of curvature (Rc), R, is the reciprocal of the curvature. For a curve, it equals the radius of the circular arc which best approximates the curve at that point. For surfaces, the radius of curvature is the radius of a circle that best fits a normal section or combinations thereof.[1][2][3]
Definition[edit]
In the case of a space curve, the radius of curvature is the length of the curvature vector.
In the case of a plane curve, then R is the absolute value of[3]

where s is the arc length from a fixed point on the curve, φ is the tangential angle and κ is the curvature.
Formula[edit]
In 2D[edit]
If the curve is given in Cartesian coordinates as y(x), i.e., as the graph of a function, then the radius of curvature is (assuming the curve is differentiable up to order 2):

and |z| denotes the absolute value of z.
Also in Classical mechanics branch of Physics Radius of curvature is given by (Net Velocity)²/Acceleration Perpendicular
If the curve is given parametrically by functions x(t) and y(t), then the radius of curvature is

Heuristically, this result can be interpreted as[2]

In n dimensions[edit]
If γ : ℝ → ℝn is a parametrized curve in ℝn then the radius of curvature at each point of the curve, ρ : ℝ → ℝ, is given by[3]
 .
.

As a special case, if f(t) is a function from ℝ to ℝ, then the radius of curvature of its graph, γ(t) = (t, f(t)), is

Derivation[edit]
Let γ be as above, and fix t. We want to find the radius ρ of a parametrized circle which matches γ in its zeroth, first, and second derivatives at t. Clearly the radius will not depend on the position γ(t), only on the velocity γ′(t) and acceleration γ″(t). There are only three independent scalars that can be obtained from two vectors v and w, namely v · v, v · w, and w · w. Thus the radius of curvature must be a function of the three scalars |γ′(t)|2, |γ″(t)|2 and γ′(t) · γ″(t).[3]
The general equation for a parametrized circle in ℝn is

where c ∈ ℝn is the center of the circle (irrelevant since it disappears in the derivatives), a,b ∈ ℝn are perpendicular vectors of length ρ (that is, a · a = b · b = ρ2 and a · b = 0), and h : ℝ → ℝ is an arbitrary function which is twice differentiable at t.
The relevant derivatives of g work out to be

If we now equate these derivatives of g to the corresponding derivatives of γ at t we obtain

These three equations in three unknowns (ρ, h′(t) and h″(t)) can be solved for ρ, giving the formula for the radius of curvature:

or, omitting the parameter t for readability,

Examples[edit]
Semicircles and circles[edit]
For a semi-circle of radius a in the upper half-plane


An ellipse (red) and its evolute (blue). The dots are the vertices of the ellipse, at the points of greatest and least curvature.
For a semi-circle of radius a in the lower half-plane

The circle of radius a has a radius of curvature equal to a.
Ellipses[edit]
In an ellipse with major axis 2a and minor axis 2b, the vertices on the major axis have the smallest radius of curvature of any points, R = b2/a; and the vertices on the minor axis have the largest radius of curvature of any points, R = a2/b.
The ellipse’s radius of curvature, as a function of parameter t

[4]
And as a function of θ

Where e is the eccentricity of the ellipse and is given by:

Applications[edit]
- For the use in differential geometry, see Cesàro equation.
- For the radius of curvature of the earth (approximated by an oblate ellipsoid); see also: arc measurement
- Radius of curvature is also used in a three part equation for bending of beams.
- Radius of curvature (optics)
- Thin films technologies
- Printed electronics
- Minimum railway curve radius
- AFM probe
Stress in semiconductor structures[edit]
Stress in the semiconductor structure involving evaporated thin films usually results from the thermal expansion (thermal stress) during the manufacturing process. Thermal stress occurs because film depositions are usually made above room temperature. Upon cooling from the deposition temperature to room temperature, the difference in the thermal expansion coefficients of the substrate and the film cause thermal stress.[5]
Intrinsic stress results from the microstructure created in the film as atoms are deposited on the substrate. Tensile stress results from microvoids (small holes, considered to be defects) in the thin film, because of the attractive interaction of atoms across the voids.
The stress in thin film semiconductor structures results in the buckling of the wafers. The radius of the curvature of the stressed structure is related to stress tensor in the structure, and can be described by modified Stoney formula.[6] The topography of the stressed structure including radii of curvature can be measured using optical scanner methods. The modern scanner tools have capability to measure full topography of the substrate and to measure both principal radii of curvature, while providing the accuracy of the order of 0.1% for radii of curvature of 90 meters and more.[7]
See also[edit]
- Base curve radius
- Bend radius
- Degree of curvature (civil engineering)
- Osculating circle
- Track transition curve
References[edit]
- ^ Weisstien, Eric. «Radius of Curvature». Wolfram Mathworld. Retrieved 15 August 2016.
- ^ a b Kishan, Hari (2007). Differential Calculus. Atlantic Publishers & Dist. ISBN 9788126908202.
- ^ a b c d Love, Clyde E.; Rainville, Earl D. (1962). Differential and Integral Calculus (Sixth ed.). New York: MacMillan.
- ^ Weisstein, Eric W. «Ellipse». mathworld.wolfram.com. Retrieved 2022-02-23.
- ^ «Controlling Stress in Thin Films». Flipchips.com. Retrieved 2016-04-22.
- ^ «On the determination of film stress from substrate bending : Stoney’s formula and its limits» (PDF). Qucosa.de. Retrieved 2016-04-22.
- ^ Peter Walecki. «Model X». Zebraoptical.com. Retrieved 2016-04-22.
Further reading[edit]
- do Carmo, Manfredo (1976). Differential Geometry of Curves and Surfaces. ISBN 0-13-212589-7.
External links[edit]
- The Geometry Center: Principal Curvatures
- 15.3 Curvature and Radius of Curvature
- Weisstein, Eric W. «Principal Curvatures». MathWorld.
- Weisstein, Eric W. «Principal Radius of Curvature». MathWorld.