Формулы математического маятника в физике
Формулы математического маятника
Определение и формулы математического маятника
Определение
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого
сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
[ddot{varphi }+{omega }^2_0varphi =0 left(1right),]
где $varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
[varphi (t)={varphi }_0{cos left({omega }_0t+alpha right)left(2right), }]
где $alpha $ — начальная фаза колебаний; ${varphi }_0$ — амплитуда колебаний; ${omega }_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
[ {omega }_0=sqrt{frac{g}{l}}left(3right).]
Период колебаний математического маятника ($T$) в этом случае равен:
[T=frac{2pi }{{omega }_0}=2pi sqrt{frac{l}{g}}left(4right).]
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
[E=E_k+E_p=frac{mv^2}{2}+mgh=frac{mv^2}{2}+frac{mgx^2}{2l}=constleft(5right),]
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
[varphi =frac{x}{l}left(6right).]
Максимальное значение потенциальной энергии математического маятника равно:
[E_{pmax}=mgh_m=frac{mg{x^2}_m}{2l}left(7right);;]
Максимальная величина кинетической энергии:
[E_{kmax}=frac{mv^2_m}{2}=frac{m{omega }^2_0{x^2}_m}{2l}=E_{pmax}left(8right),]
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m={omega }_0x_m$ — максимальная скорость.
Примеры задач с решением
Пример 1
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
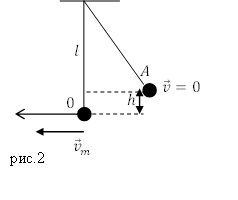
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
[frac{mv^2}{2}=mgh left(1.1right).]
Из уравнения (1.1) найдем искомую высоту:
[h=frac{v^2}{2g}.]
Ответ. $h=frac{v^2}{2g}$
Пример 2
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit{}
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
[T=2pi sqrt{frac{l}{g}}left(2.1right).]
Выразим из нее ускорение:
[g=frac{4{pi }^2l}{T^2} .]
Проведем вычисления ускорения силы тяжести:
[g=frac{4{pi }^2cdot 1}{2^2}={pi }^2approx 9,87 left(frac{м}{с^2}right).]
Ответ. $g=9,87 frac{м}{с^2}$
Читать дальше: формулы пружинного маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Частота математического маятника

Виктор Матвеевич Скоков
Эксперт по предмету «Физика»
Задать вопрос автору статьи
Замечание 1
Колебаниям математический маятника — тела с точечной массой, подвешенного на упругой нити — свойственен изохронизм. Это значит, что их частота не зависит от амплитуды и массы подвешенного тела. Такая система обладает свойствами гармонического осциллятора — устройства, график движения тела, в котором представляет собой синусоиду.
Функция, описывающая гармонические колебания:
$varphi (t) = varphi_0 cdot cos(omega_0 + alpha)$, где:
- $ alpha$- начальная фаза колебаний,
- $varphi_0$ — их амплитуда,
- $omega_0$ — циклическая частота.
Циклическая частота связана с длиной подвеса математического маятника зависимостью:
$omega_0 = sqrt{frac{g}{l}}$,
где $g$ — ускорение свободного падения, $l$ — длина нити.
![]()
Сдай на права пока
учишься в ВУЗе
Вся теория в удобном приложении. Выбери инструктора и начни заниматься!
Получить скидку 3 000 ₽
Эта зависимость получается исходя из того, что при малых отклонениях от вертикали касательную (тангенциальную) составляющую силы, тянущей маятник по дуге, можно найти как сумму векторов силы упругости нити (направлена от тела к центру вращения вдоль нити) и силы тяжести (направлена вертикально вниз). Ускорение, создаваемое касательной силой, относится к ускорению свободного падения в следующем соотношении:
$a = g cdot frac{x}{l}$,
где $l$ — длина нити, $x$ — модуль касательной силы.
Поскольку же уравнение колебательного движения выглядит как
$a = — omega_0^2 cdot x$,
где $omega_0$ — частота циклических колебаний, можно подставить в формулу для нахождения периода колебаний полученное соотношение:
$T = frac{2pi}{omega_0}; omega_0 = sqrt{frac{g}{l}} implies T = 2pi cdot sqrt{frac{l}{g}}$
Частоту можно найти как величину, обратную периоду.
$f = frac{1}{T}$
Пример 1
Найти частоту колебаний маятника с длиной подвеса 1 м.
$T = 2 cdot 3,14 cdot sqrt{frac{1}{9,8}} approx 2 с$.
$f = frac{1}{2} = 0,5$
Ответ: 0,5 колебаний в секунду.
Находи статьи и создавай свой список литературы по ГОСТу
Поиск по теме
Дата последнего обновления статьи: 22.04.2023
Похожие материалы по теме
Автор(ы):
Алексей Алексеевич Ивахно
Автор(ы):
Алексей . Малеев
Автор(ы):
Андрей Геннадьевич Блохин
Автор(ы):
Сергей Феликсович Савельев
Автор(ы):
Наталья Николаевна Пушкина
Решение любого учебного вопроса за 300₽
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
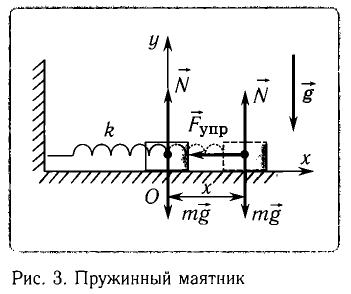
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
Формулы математического маятника
Определение и формулы математического маятника
Математический маятник — это колебательная система, являющаяся частным случаем физического маятника, вся масса которого сосредоточена в одной точке, центре масс маятника.
Обычно математический маятник представляют как шарик, подвешенный на длинной невесомой и нерастяжимой нити. Это идеализированная система, совершающая гармонические колебания под действием силы тяжести. Хорошим приближением к математическому маятнику массивный маленький шарик, осуществляющий колебания на тонкой длинной нити.
Галилей первым изучал свойства математического маятника, рассматривая качание паникадила на длинной цепи. Он получил, что период колебаний математического маятника не зависит от амплитуды. Если при запуске мятника отклонять его на разные малые углы, то его колебания будут происходить с одним периодом, но разными амплитудами. Это свойство получило название изохронизма.
Уравнение движения математического маятника
Математический маятник — классический пример гармонического осциллятора. Он совершает гармонические колебания, которые описываются дифференциальным уравнением:
где $varphi $ — угол отклонения нити (подвеса) от положения равновесия.
Решением уравнения (1) является функция $varphi (t):$
где $alpha $ — начальная фаза колебаний; $<varphi >_0$ — амплитуда колебаний; $<omega >_0$ — циклическая частота.
Колебания гармонического осциллятора — это важный пример периодического движения. Осциллятор служит моделью во многих задачах классической и квантовой механики.
Циклическая частота и период колебаний математического маятника
Циклическая частота математического маятника зависит только от длины его подвеса:
Период колебаний математического маятника ($T$) в этом случае равен:
Выражение (4) показывает, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения.
Уравнение энергии для математического маятника
При рассмотрении колебаний механических систем с одной степенью свободы часто берут в качестве исходного не уравнения движения Ньютона, а уравнение энергии. Так как его проще составлять, и оно является уравнением первого порядка по времени. Предположим, что трение в системе отсутствует. Закон сохранения энергии для совершающего свободные колебания математического маятника (колебания малые) запишем как:
где $E_k$ — кинетическая энергия маятника; $E_p$ — потенциальная энергия маятника; $v$ — скорость движения маятника; $x$ — линейное смещение груза маятника от положения равновесия по дуге окружности радиуса $l$, при этом угол — смещение связан с $x$ как:
Максимальное значение потенциальной энергии математического маятника равно:
Максимальная величина кинетической энергии:
где $h_m$ — максимальная высота подъема маятника; $x_m$- максимальное отклонение маятника от положения равновесия; $v_m=<omega >_0x_m$ — максимальная скорость.
Примеры задач с решением
Задание. Какова максимальная высота подъема шарика математического маятника, если его скорость движения при прохождении положения равновесия составляла $v$?
Решение. Сделаем рисунок.
Пусть ноль потенциальной энергии шарика в его положении равновесия (точка 0).В этой точке скорость шарика максимальна и равна по условию задачи $v$. В точке максимального подъема шарика над положением равновесия (точка A), скорость шарика равна нулю, потенциальная энергия максимальна. Запишем закон сохранения энергии для рассмотренных двух положений шарика:
Из уравнения (1.1) найдем искомую высоту:
Ответ. $h=frac<2g>$
Задание. Каково ускорение силы тяжести, если математический маятник имеющий длину $l=1 м$, совершает колебания с периодом равным $T=2 с$? Считайте колебания математического маятника малыми.textit<>
Решение. За основу решения задачи примем формулу для вычисления периода малых колебаний:
Выразим из нее ускорение:
Проведем вычисления ускорения силы тяжести:
Ответ. $g=9,87 frac<м><с^2>$
Период колебаний математического маятника
Математический маятник — что это такое
Маятник — твердое тело, которое совершает под действием приложенных сил механические колебания около неподвижной точки или оси.
Простейший маятник состоит из небольшого груза массой m, подвешенного на невесомой нити или тонком стержне длиной l и совершающего колебания под воздействием земного притяжения. Если нить считать нерастяжимой, размер груза незначительным по сравнению с длиной нити, а массу нити незначительной по сравнению с массой груза, то груз можно считать материальной точкой массой m, находящейся на постоянном расстоянии l от точки подвеса. Такой маятник называют математическим.
Определение модели системы
Математические модели динамических систем часто используют для анализа самых разных технических, социально-экономических, естественнонаучных систем, в которых происходят циклические процессы.
Существуют различные классификации динамических процессов. Одна из них изображена на схеме:
Маятник Фуко
Маятник Фуко — подвес, плоскость колебаний которого со временем изменяется. Он был создан для экспериментальной демонстрации суточного вращения Земли. Впервые опыт, доказывающий, что Земля вращается, был проведен французским ученым Жаном Фуко в 1851 году в Парижской обсерватории. Маятник имел вид металлического шара массой 28 кг, подвешенного на нити длиной 67 м. Период его колебаний составлял 16,4 с.
Наблюдая за его колебаниями, можно было заметить, что плоскость, в которой они происходят, медленно поворачивается, причем в разных местах земного шара с различной скоростью. Она минимальна, т. е. равна нулю, на экваторе планеты, а максимальна — на ее полюсах.
Если мы обозначим период вращения Земли вокруг ее оси Т, а географическую широту местности — φ , тогда время t, за которое плоскость колебаний маятника совершает полный оборот, окажется равно
Отсюда следует, что если бы Земля не вращалась, данного эффекта просто не существовало бы. Это обстоятельство указывает на то, что причиной неинерциальности земной системы отсчета является вращение планеты.
Центробежное ускорение на экваторе равно 0 , 034 м / с 2 . По сравнению с экваториальным ускорением свободного падения g = 9 , 78 м / с 2 это величина малая, но она заметно влияет на изменение веса тела на экваторе по сравнению с его весом на полюсе. Если, например, взвешивать на пружинных весах тело массой 10 кг, то уменьшение веса на экваторе за счет действия центробежной силы составит около 35 г.
Период колебаний математического маятника
Период колебаний — время, за которое происходит одно полное колебание. В СИ измеряется в секундах.
Чему равен, от чего зависит частота
Если за время t совершается N колебаний, то период, обозначаемый буквой T, равен
где v — частота колебаний. Она обратно пропорциональна периоду.
Колебания можно изобразить в виде графика:
Источник: physik.ucoz.ru.
Период колебаний математического маятника можно рассчитать по формуле
g — ускорение свободного падения. Не зависит от амплитуды колебаний и массы груза.
Циклическая частота — число колебаний, которые система совершает за 2 π секунды. Также циклическую частоту называют угловой, круговой или радиальной. Кратко ее записывают греческой буквой ω . Она позволяет упростить расчеты с использованием радианов, так как при ее введении сокращаются множители 2 π .
В случае математического маятника она определяется длиной подвеса и ускорением свободного падения:
Для физического маятника в уравнение добавляются инерция и масса подвеса:
Для пружинного маятника частоту определяет жесткость пружины k:
Уравнения движения и их решение, формулы с примерами
Математический маятник — это материальная точка, имеющая массу m и подвешенная на нити с неизменяемой длиной l. Покидая положение равновесия, подвес совершает колебательные движения по дуге.
Источник: osu.ru.
Угловое ускорение ε — вторая производная от угла поворота α , вращающий момент относительно точки А создает только сила тяжести:
M = — m g × l sin α .
Угол отклонения мал, поэтому мы учитываем только то, что он отрицателен. Синус угла α считаем приблизительно равным α . Тогда:
m l 2 × α ‘ ‘ = — m g l α ;
Это дает нам дифференциальное уравнение гармонических колебаний
Из уравнения следует, что при малых углах отклонения от положения равновесия маятник будет колебаться с периодом
T = 2 π ω = 2 π l g .
Все кинематические характеристики движения меняются по гармоническим законам, т. е. по закону синуса или косинуса. Рассмотрим, от чего зависят константы амплитуды А и начальной фазы движения φ 0 .
Амплитуда колебаний определяется энергией, переданной маятнику при отклонении от положения равновесия. В случае пружинного маятника в крайнем положении скорость груза и кинетическая энергия равны нулю, полная энергия состоит только из потенциальной энергии:
E п о л н а я = k A 2 2 .
Из этого следует, что
А = 2 E п о л н а я k .
Начальная фаза зависит от того, как маятник вывели из положения равновесия. Рассмотрим ситуацию, в которой маятник отклонили от положения равновесия на расстояние А и отпустили без начальной скорости. Запишем уравнение движения колеблющегося тела с учетом того факта, что в начальный момент координата тела будет равна А:
x = A × cos ω t + φ 0 ;
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = А ⇒ cos φ 0 = 1 ⇒ φ 0 = 1 .
Уравнение движения маятника:
Если маятник толкнули, когда он находился в положении равновесия, начальная координата колеблющейся точки будет равна нулю:
x ( 0 ) = A × cos ω × 0 + φ 0 = A × cos φ 0 = 0 ⇒ cos φ 0 = 0 ⇒ φ 0 = ± π 2 .
Будет ли начальная координата положительной или отрицательной, определяет выбор положительного направления оси. Если направление оси совпадет с направлением начальной скорости, то в уравнении движения будет знак «плюс», если не совпадет — знак «минус».
Уравнение движения маятника:
x ( 0 ) = A × cos ω t ± π 2 = ± A × sin ω t .
Рассмотрим задачи, для которых требуется составлять и решать уравнения движения.
Необходимо определить амплитуду и частоту колебаний точки, если известно, что при смещении точки от положения равновесия на 5 см ее скорость равна 6 см/с, а при смещении на 3 см — 10 см/с.
x = A × cos ω t + φ 0 v x = x ‘ = — A ω × sin ω t + φ 0
Исключаем время из системы:
x = A × cos ω t + φ 0 v x = x ‘ = — A ω × sin ω t + φ 0 ⇒ x = A × cos ω t + φ 0 v x ω = — A × sin ω t + φ 0 ⇒ x 2 = A 2 × cos 2 ω t + φ 0 v 2 ω 2 = A 2 × sin 2 ω t + φ 0
x 2 + v 2 ω 2 = А 2 .
x 2 А 2 + v 2 v 2 m a x = 1 .
x 1 2 + v 1 2 ω 2 = А 2 x 2 2 + v 2 2 ω 2 = А 2
Преобразовав выражения и подставив значения, данные в условиях задачи, получаем:
ω = v 2 2 — v 1 2 x 1 2 — x 2 2 = 2 c — 1 ;
A = x 1 2 v 2 2 — x 2 2 v 1 2 v 1 2 — v 2 2 ≈ 5 , 57 с м ;
v = ω 2 π ≈ 0 , 32 Г ц .
Необходимо вычислить циклическую частоту колебаний точки, если известно, что при скорости 13 см/с ускорение равнялось 6 с м / с 2 , а при уменьшении скорости до 12 см/с произошло увеличение ускорения до 10 с м / с 2 .
Решение:
Координата точки меняется по закону
Запишем уравнения скорости и ускорения точки:
v x = — A × ω × sin ω t a x = — A × ω 2 × cos ω t ⇒ v x A ω = — sin ω t a x A ω 2 = — cos ω t ⇒ v 2 ω 2 + a 2 ω 4 = A 2 .
Преобразуем уравнение, исключив из него А, и подставим значения, данные в условиях задачи:
ω = a 2 2 — a 1 2 v 1 2 — v 2 2 = 1 , 6 c — 1 .
Практическое применение математического маятника
С помощью математического моделирования динамических систем можно обнаружить схожесть динамических процессов в реальных физических, технических, биологических, химических и социально-экономических системах. Разработка моделей, позволяющих предсказывать время и другие характеристики периодических процессов в этих системах, является эффективным способом анализировать, например, сельскохозяйственные или производственно-экономические процессы.
Пружинные и математические маятники в физике — виды, формулы и определения с примерами
Содержание:
Пружинные и математические маятники:
Тело или система тел, совершающие периодические колебательные движения, называются маятниками. Большинство колебательных движений, встречающихся в природе, напоминают движение пружинных и математических маятников.
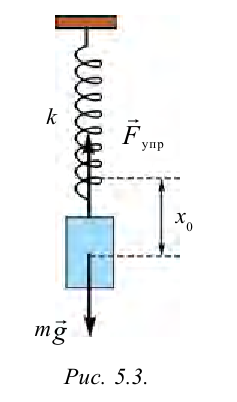
Система, состоящая из груза массой 

Если немножко растянуть пружину и отпустить, то груз придет в колебательное движение в вертикальном направлении.
С помощью опытов мы определили, что смещение груза в зависимости от времени изменяется следующbм образом:
Если учесть, что ускорение тела, совершающего гармонические колебания  , то уравнение (5.10) примет вид:
, то уравнение (5.10) примет вид:
Из этого уравнения мы имеем:

Значит, частота циклического колебания тела, совершающего гармоническое колебание, зависит от параметров тел, входящих в систему колебания. Формула (5.12) называется формулой для
определения циклической (периодической) частоты пружинного маятника .
.
Период колебания пружинного маятника прямо пропорционален выведенному из-под квадратного корня значению массы груза и обратно пропорционален выведенному из-под квадратного корня значению упругости пружины.
Рассмотрим обмен энергиями в пружинном маятнике. Кинетическая энергия маятника, если не учитывать массу пружины, равна кинетической энергии груза,  . В предыдущих темах было показано, что скорость можно выразить формулой
. В предыдущих темах было показано, что скорость можно выразить формулой  . В таком случае кинетическая энергия маятника равна
. В таком случае кинетическая энергия маятника равна

Потенциальная энергия пружинного маятника равна энергии деформации пружины, т.е.:

В большинстве случаев важно знать полную энергию системы:

Если учесть, что  ,
,


Обратите внимание, что полная энергия пружинного маятника является постоянной величиной, не зависящей от времени, т.е. соблюдается выполнение закона сохранения механической энергии.
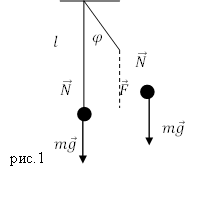
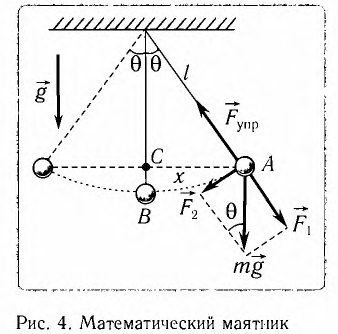
Материальная точка, подвешенная на нерастяжимой и невесомой нити и совершающая периодическое колебательное движение вокруг равновесного состояния, называется математическим маятником.
Когда маятник находится в устойчивом равновесном состоянии, вес материальной точки  уравновешивает силу натяжения
уравновешивает силу натяжения  (рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол
(рис. 5.4), так как их модули равны и направлены по одной линии в противоположные стороны. Если наклонить маятник на угол  , силы
, силы  и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
и не смогут уравновесить друг друга из-за взаимного расположения под углом. В результате сложения таких сил появится возвращающая сила, которая вернет маятник в равновесное состояние. Если отпустить маятник, то под воздействием возвращающей силы он начинает двигаться в сторону равновесного состояния.
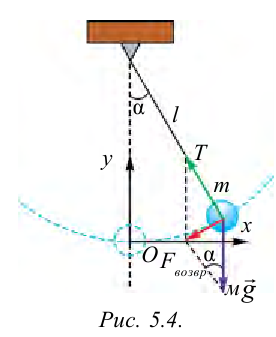
Из рис. 5.4. видим, что:

Согласно второму закону Ньютона, сила  придает материальной точке ускорение
придает материальной точке ускорение  , поэтому
, поэтому

Из-за того, что угол наклона очень маленький  , а сила
, а сила  направлена противоположно смещению, формулу (5.19) можно записать в виде
направлена противоположно смещению, формулу (5.19) можно записать в виде

Если смещение материальной точки (шарика) во время колебательного процесса отметить буквой  и учитывать соотношение
и учитывать соотношение  , получим
, получим 
Следовательно 
Исходя из смысла периода колебания и учитывая, что  получаем
получаем

Эта формула, определяющая период колебания математического маятника, называется формулой Гюйгенса. Отсюда вытекают следующие законы математического маятника:
- при маленьких углах наклона (а) математического маятника, его период колебания не зависит от амплитуды колебания.
- период колебания математического маятника также не зависит от массы подвешенного на него груза;
- период колебания математического маятника прямо пропорционален выведенному из-под квадратного корня значению длины маятника и обратно пропорционален выведенному из-под квадратного корня значению ускорения свободного падения.
Отсюда колебание математического маятника записывается следующим выражением:
Следует отметить, что когда амплитуда колебания или угол наклона велики, колебания математического маятника не являются гармоническим. В этом случае нельзя считать  и для решения уравнения движения не применяется закон синусов или косинусов.
и для решения уравнения движения не применяется закон синусов или косинусов.
Пример:
Период колебания первого маятника равен 3 сек, второго – 4 сек. Найдите период колебания маятника с длиной, равной сумме длин этих маятников.

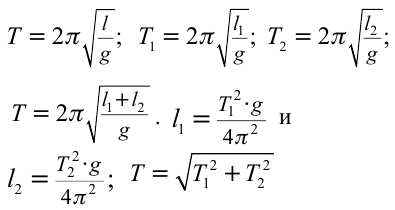
Решение: 
Ответ: 5 cек.
Пружинный и математический маятники
Второй закон Ньютона (основной закон динамики): ускорение, приобретаемое материальной точкой, прямо пропорционально равнодействующей всех сил, действующих на нее, и обратно пропорционально массе материальной точки:
Закон Гука: модуль силы упругости  , возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)
, возникающей в теле при упругих деформациях, прямо пропорционален его абсолютному удлинению (сжатию)  :
:

где k — жесткость тела,  — длина недеформированного тела, l — длина деформированного тела.
— длина недеформированного тела, l — длина деформированного тела.
Рассмотрим пружинный маятник, представляющий собой колебательную систему, образованную грузом на пружине.
Пусть груз массой т, лежащий на гладкой горизонтальной поверхности, прикреплен к свободному концу невесомой пружины жесткостью k (рис. 3). Второй конец пружины закреплен относительно данной инерциальной системы отсчета (ИСО).
Выведем груз из положения равновесия, сместив его на расстояние х вправо. В пружине возникнет сила упругости  направленная влево.
направленная влево.
Запишем второй закон Ньютона для движения груза:

В проекции на ось Ох действующих на груз сил с учетом закона Гука получаем
 или
или 
Это уравнение аналогично уравнению гармонических колебаний
Сравнивая эти два уравнения, находим циклическую частоту колебаний пружинного маятника:
Тогда период колебаний пружинного маятника можно найти по формуле
Как следует из полученной формулы, период колебаний пружинного маятника не зависит от амплитуды его колебаний (в пределах выполнимости закона Гука).
Свойство независимости периода колебаний маятника от амплитуды называется изохронностью (от греческих слов  , — равный и
, — равный и  — время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
— время). Таким образом, колебания пружинного маятника обладают свойством изохронности.
Изохронность колебаний маятника была открыта Галилео Галилеем в 1583 г. при изучении движения грузика, подвешенного на нити. Моделью данной колебательной системы является математический маятник.
Математическим маятником называется материальная точка массой т, подвешенная на невесомой нерастяжимой нити длиной l в поле каких-либо сил, например силы тяжести Земли (рис. 4).
Математический маятник — это идеализированная модель реального маятника при условии, что длина нити намного больше размеров подвешенного на ней тела и масса нити намного меньше массы тела. Кроме того, деформацией нити можно пренебречь.
Галилео Галилей экспериментально определил, что период малых колебаний (9
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://wika.tutoronline.ru/fizika/class/11/period-kolebanij-matematicheskogo-mayatnika
http://www.evkova.org/pruzhinnyie-i-matematicheskie-mayatniki-v-fizike
|
Колебания математического маятника. |
|
|
Математический маятник – материальная точка, подвешенная на невесомой нерастяжимой нити (физическая модель). |
|
|
Будем рассматривать движение маятника при условии, что угол отклонения мал, тогда, если измерять угол в радианах, справедливо утверждение: |
|
|
На тело действуют сила тяжести и сила натяжения нити. Равнодействующая этих сил имеет две составляющие: тангенциальную, меняющую ускорение по величине, и нормальную, меняющую ускорение по направлению (центростремительное ускорение, тело движется по дуге). |
|
|
Т.к. угол мал, то тангенциальная составляющая равна проекции силы тяжести на касательную к траектории: |
|
|
Сравним полученное уравнение с уравнением колебательного движения Видно, что |
|
|
Период колебаний |
Формула Галилея |
|
Важнейший вывод: период колебаний математического маятника не зависит от массы тела! |
|
|
Аналогичные вычисления можно проделать с помощью закона сохранения энергии. Учтем, что потенциальная энергия тела в поле тяготения равна |
|
|
Запишем закон сохранения энергии и возьмем производную от левой и правой частей уравнения: Т.к. производная от постоянной величины равна нулю, то Производная суммы равна сумме производных: |
|
|
Следовательно: |

 или
или  (формула Галилея).
(формула Галилея).