Часто мы слышим выражения: «он инертный», «двигаться по инерции», «момент инерции». В переносном значении слово «инерция» может трактоваться как отсутствие инициативы и действий. Нас же интересует прямое значение.
Ежедневная рассылка с полезной информацией для студентов всех направлений – на нашем телеграм-канале.
Что такое инерция
Согласно определению инерция в физике – это способность тел сохранять состояние покоя или движения в отсутствие действия внешних сил.
Если с самим понятием инерции все понятно на интуитивном уровне, то момент инерции – отдельный вопрос. Согласитесь, сложно представить в уме, что это такое. В этой статье Вы научитесь решать базовые задачи на тему «Момент инерции».
Определение момента инерции
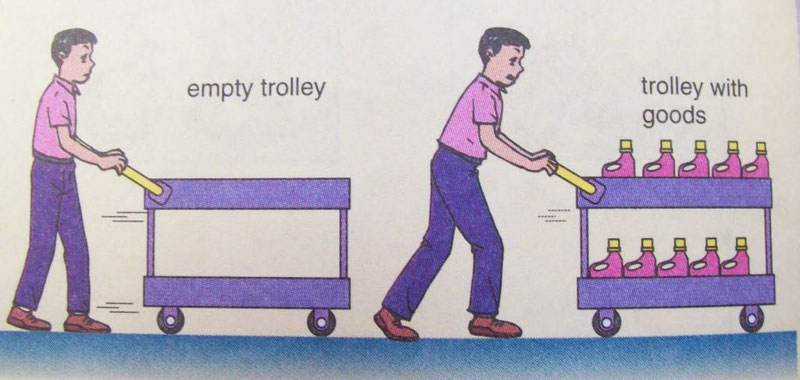
Из школьного курса известно, что масса – мера инертности тела. Если мы толкнем две тележки разной массы, то остановить сложнее будет ту, которая тяжелее. То есть чем больше масса, тем большее внешнее воздействие необходимо, чтобы изменить движение тела. Рассмотренное относится к поступательному движению, когда тележка из примера движется по прямой.
По аналогии с массой и поступательным движением момент инерции – это мера инертности тела при вращательном движении вокруг оси.
Момент инерции – скалярная физическая величина, мера инертности тела при вращении вокруг оси. Обозначается буквой J и в системе СИ измеряется в килограммах, умноженных на квадратный метр.
Как посчитать момент инерции? Есть общая формула, по которой в физике вычисляется момент инерции любого тела. Если тело разбить на бесконечно малые кусочки массой dm, то момент инерции будет равен сумме произведений этих элементарных масс на квадрат расстояния до оси вращения.

Это общая формула для момента инерции в физике. Для материальной точки массы m, вращающейся вокруг оси на расстоянии r от нее, данная формула принимает вид:
Теорема Штейнера
От чего зависит момент инерции? От массы, положения оси вращения, формы и размеров тела.
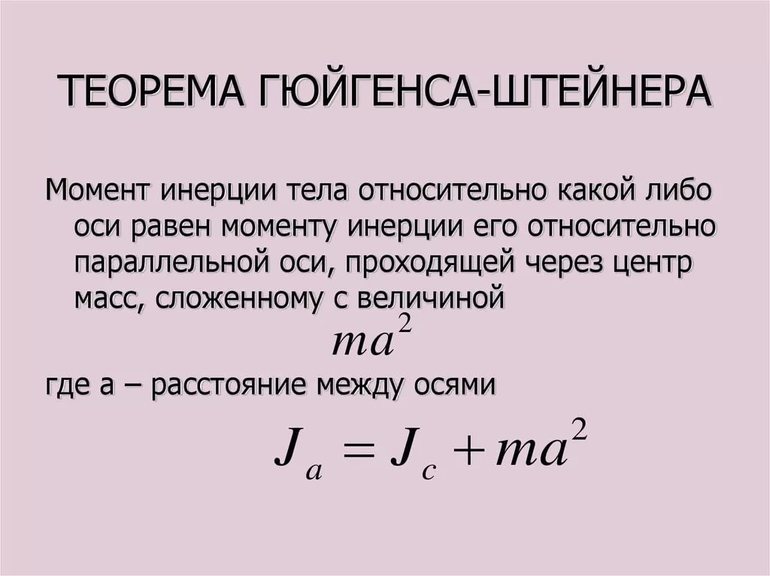
Теорема Гюйгенса-Штейнера – очень важная теорема, которую часто используют при решении задач.
Кстати! Для наших читателей сейчас действует скидка 10% на любой вид работы
Теорема Гюйгенса-Штейнера гласит:
Момент инерции тела относительно произвольной оси равняется сумме момента инерции тела относительно оси, проходящей через центр масс параллельно произвольной оси и произведения массы тела на квадрат расстояния между осями.
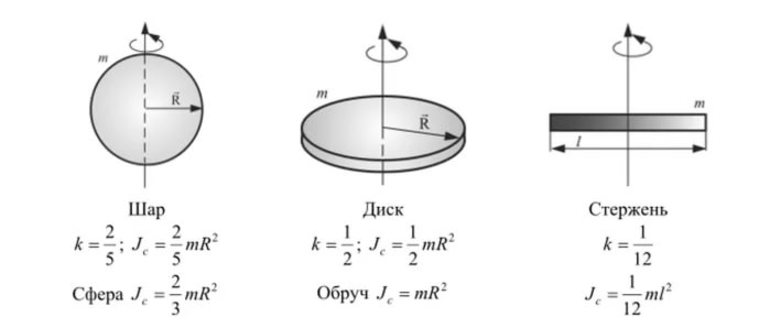
Для тех, кто не хочет постоянно интегрировать при решении задач на нахождение момента инерции, приведем рисунок с указанием моментов инерции некоторых однородных тел, которые часто встречаются в задачах:

Пример решения задачи на нахождение момента инерции
Рассмотрим два примера. Первая задача – на нахождение момента инерции. Вторая задача – на использование теоремы Гюйгенса-Штейнера.
Задача 1. Найти момент инерции однородного диска массы m и радиуса R. Ось вращения проходит через центр диска.
Решение:
Разобьем диск на бесконечно тонкие кольца, радиус которых меняется от 0 до R и рассмотрим одно такое кольцо. Пусть его радиус – r, а масса – dm. Тогда момент инерции кольца:
Массу кольца можно представить в виде:

Здесь dz – высота кольца. Подставим массу в формулу для момента инерции и проинтегрируем:

В итоге получилась формула для момента инерции абсолютного тонкого диска или цилиндра.
Задача 2. Пусть опять есть диск массы m и радиуса R. Теперь нужно найти момент инерции диска относительно оси, проходящей через середину одного из его радиусов.
Решение:
Момент инерции диска относительно оси, проходящей через центр масс, известен из предыдущей задачи. Применим теорему Штейнера и найдем:
Кстати, в нашем блоге Вы можете найти и другие полезные материалы по физике и решению задач.
Надеемся, что Вы найдете в статье что-то полезное для себя. Если в процессе расчета тензора инерции возникают трудности, не забывайте о студенческом сервисе. Наши специалисты проконсультируют по любому вопросу и помогут решить задачу в считанные минуты.

Иван Колобков, известный также как Джони. Маркетолог, аналитик и копирайтер компании Zaochnik. Подающий надежды молодой писатель. Питает любовь к физике, раритетным вещам и творчеству Ч. Буковски.
Определение:
Моментом
инерции материальной точки относительно
неподвижной оси называется скалярная
физическая величина, являющаяся мерой
инертности этой точки при вращательном
движении и, равная произведению её массы
на квадрат расстояния до оси,
т.е.
![]() ,
,
а также![]() ,
,
где![]() —
—
угловая скорость тела относительно
данной оси.
Определение:
Моментом
инерции системы материальных точек
относительно неподвижной оси называется
скалярная физическая величина, являющаяся
мерой инертности этой системы при
вращательном движении и, равная
алгебраической сумме произведений масс
всех материальных точек системы на
квадрат их расстояний до оси,
т.е.
![]() .
.
Момент
инерции определен только относительно
оси.
В случае непрерывного распределения
масс с плотностью сумма заменится
на интеграл по всему объему тела:
![]() (Интегрирование производится по всему
(Интегрирование производится по всему
объёму; пределы интегрирования
устанавливаются исходя из конфигурации
тела и его размеров). Если тело однородно,
то его плотность во всех точках постоянна
и
можно вынести из-под знака интеграла.
Найдем моменты инерции для простейших
(геометрически правильных) форм твердого
тела, масса которого равномерно
распределена по объему, т.е.
![]() .
.
1. Момент инерции
обручаотносительно оси, перпендикулярной
к его плоскости и проходящей через его
центр.
Обруч считается бесконечно тонким, т.е.
толщиной обода можно пренебречь по
сравнению с радиусом R..
Поскольку в этой системе все массы
находятся на одинаковом расстоянии от
оси вращения, R2можно вынести из-под знака интеграла:![]() ,
,
гдеm— полная масса обруча.
2. Момент инерции
дискаотносительно оси, перпендикулярной
его плоскости и проходящей через центр.
Диск считается бесконечно тонким, т.е.
его толщина много меньше радиуса
R.Момент инерции,
согласно определению, величина аддитивная:
момент инерции целого тела равен сумме
моментов инерции его частей. Разобьем
диск на бесконечно тонкие обручи радиусомsи толщинойds
(См.рис.).
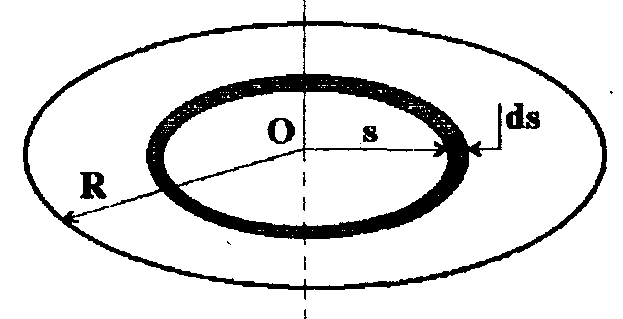
Момент инерции диска относительно
перпендикулярной оси, проходящей через
центр.
Площадь поверхности обруча равна
произведению его длины на толщину: 2
s
ds.Поскольку массатдиска распределена равномерна, масса
обручаdmпропорциональна площади его поверхности:
![]() .
.
Момент инерции обруча мы уже знаем:
![]() . Осталось просуммировать моменты
. Осталось просуммировать моменты
инерции всех таких обручей:![]() .
.
Такой же результат получится и для
момента инерции цилиндра конечной
длины относительно его продольной оси.
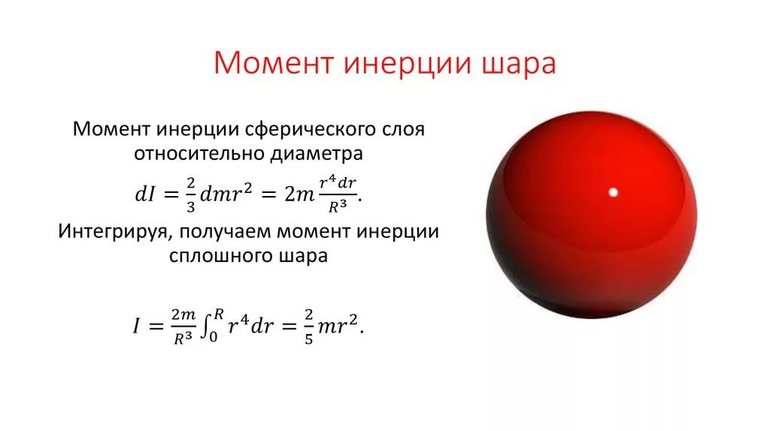
3. Момент инерции
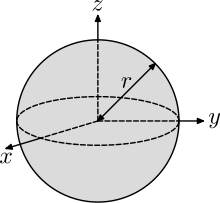
шараотносительно его диаметра.
Поступим аналогичным образом: «нарежем»
шар на бесконечно тонкие диски
толщинойdz.находящиеся на расстоянииzот центра (См.рис.).
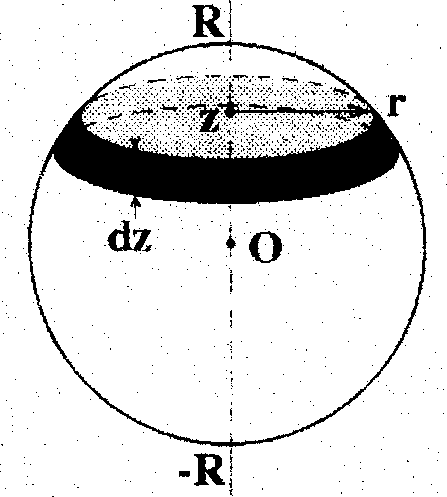
Момент инерции шара относительно
диаметра.
Радиус такого диска равен
![]() . Объем дискаdVz
. Объем дискаdVz
равен произведению его площади
на толщину:
![]() . Массу дискаdmнаходим, разделив массу шаратна его объем
. Массу дискаdmнаходим, разделив массу шаратна его объем![]() , умножив на объем диска:
, умножив на объем диска:
![]() .
.
Момент инерции диска был найден выше.
В применении к данному случаю, он
равен:
![]() .
.
Момент инерции шара находится
интегрированием по всем таким дискам:
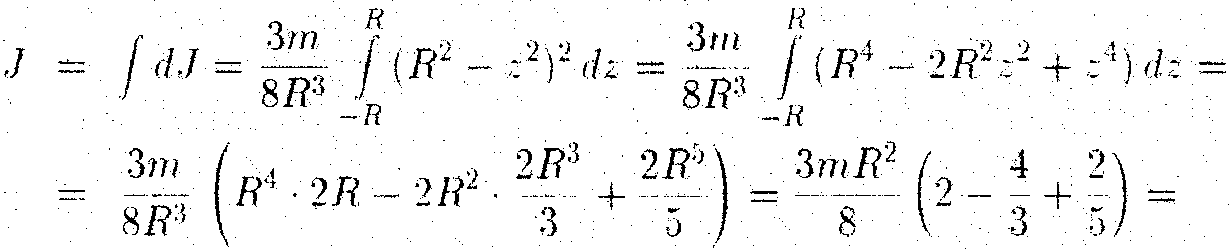
![]()
4.Момент инерции
тонкого стержняотносительно оси,
проходящей через его середину
перпендикулярно стержню.
Пусть стержень имеет длину
ℓ.Направим осьxвдоль стержня. Начало координат по
условию находится в центре стрежня.
Возьмем элемент стержня длинойdx.находящийся на расстоянииxот оси вращения. Его масса равна
dm
= (m/ℓ)
dx,а момент инерцииdJ=(m/ℓ)
x2
dx.
Отсюда находим момент инерции стрежня:
![]() (*).
(*).
Момент инерции величина аддитивная,
т.е. суммарный момент инерции системы
тел относительно какой-либо оси, равен
сумме моментов инерции каждого из тел
данной системы относительно той же оси:
![]()
Физический смысл момента инерции:Инерционные свойства при поступательном
движении характеризуются только массой
тела, т.е. зависит только от массы.
Инерционные свойства при вращательном
движении характеризуются моментом
инерции, т.е. зависят от его массы,
расстояния до оси вращения и расположению
теда по отношению к этой оси. Последнее
означает, что относительно двух разных
осей инерционные свойства вращательного
движения одного и того же движения тела
будут разными. Пример.

Основные понятия и суть

Инерция — это способность тела сохранять приданную ей скорость движения при отсутствии какого-либо внешнего воздействия. Например, во время езды на общественном транспорте всем приходится держаться за поручни. Если этого не сделать, то при изменении скорости движения транспортного средства существует большая вероятность упасть вперёд или назад. Другими словами, возникает какая-то сила, влияющая на пассажира. Когда её действие заканчивается, движение человека всё равно продолжается.
Это свойство и описывается понятием инертность. Раньше изучали это явление известные учёные Галилей, Ньютон, Мах. В соответствии с их исследованиями было установлено классическое правило момента вращения, физический смысл которого заключается в распределении массы в теле, определяемой суммой произведения простейшей массы на расстояние до начального множества в квадрате. Классическая формула, описывающая характеристику, выглядит следующим образом: Ja = Σmi*r2j. В ней:
- mi — масса в точке;
- rj — расстояние от точки до координаты.
То есть момент — это скалярная величина, являющаяся мерой инертности. В качестве единицы измерения по международной системе принято использовать произведение килограмма на квадратный метр (кг*м²). Обозначают параметр латинской буквой I или J. При умножении момента инерции на угловое ускорение можно определить сумму моментов всех сил, приложенных к телу: M = I * E. Фактически это уравнение является аналогом второго закона Ньютона.
М — это момент силы, оказывающий вращательное движение и воздействующий на ускорение тела, а E — угловое ускорение. Мера инертности тела отличается от массы тем, что вторая проявляется, когда его необходимо разогнать, а первая — при его раскручивании.
Вычисление параметра
Характеристика инерции тел зависит от их количественных показателей и формы. Для того чтобы найти характеристику, можно рассмотреть вращение материальной точки, находящейся на невесомой штанге, имеющей длину r и массу m. Для такой ситуации формулу момента инерции можно записать: I = m*r2. Длина r представляет собой радиус кольца, по которому происходит вращение объекта по оси. Таким образом, рассматриваемый момент зависит не только от массы тела, но и геометрических характеристик.
Любое тело можно описать совокупностью материальных точек. Для понятия процесса лучше всего рассмотреть простой пример. Пусть имеется невесомый цилиндр, способный вращаться по радиусу Rc. На него намотана верёвка, к которой приложена сила F. На цилиндр будут насаживаться тела с различной формой. Если известны его радиус и сила, с которой происходит раскручивание, то справедливо будет записать следующее выражение: M = F*Rc.
Допустим, на цилиндр помещены два тела. Одно имеет массу m1 и радиус вращения r1, а другое — m2 и r2. Используя основное уравнение динамики вращательного движения для первого тела с угловым ускорением ƹ1, момент силы можно определить как M1 = I1 * ƹ1. Соответственно, для второго предмета сила будет определяться по формуле: M1 = I2 * ƹ2.
Если эти два тела жёстко скрепить между собой, то они буду представлять собой составные части одного предмета, поэтому их угловые ускорения станут одинаковы (ƹ1 + ƹ2 = ƹ), а требующийся момент M станет равный сумме M1 + M2. Подставив значения, получим равенство M = I1*ƹ + I2*ƹ. Выражение можно упростить до вида M = ƹ (I1+I2). То есть нужный момент для тела, состоящего из совокупности точек, будет равен произведению суммы моментов инерции на угловое ускорение обоих тел.
Из сказанного можно сделать вывод, что момент инерции всего тела равен сумме моментов составных частей. Другим словами, он обладает свойством аддитивности. Используя это, можно составить алгоритм расчёта для любой формы.
Методика решения
Существует универсальный алгоритм, подходящий для расчёта параметра прямоугольника, треугольника, круга или другой фигуры произвольной формы. Допустим, есть сложное тело с заданной осью вращения. Необходимо найти момент его вращения. Для того чтобы решить поставленную задачу, используются два принципа:
- Аддитивность — свойство, обозначающее, что величина целого значения определяется суммой соответствующих ему частей.
- Формула нахождения момента для материальной точки I = m*r2.
Всё тело можно разделить на мельчайшие частички, которые представляют собой материальные точки. Номера этих кусков обозначают в виде i. Масса произвольной части будет определяться как дельта mi. Пусть этот кусок находится на расстоянии ri от оси вращения O. Для этой части момент вращения находится с помощью выражения Ii = Δ mi*ri2. Учитывая аддитивность, общий момент будет равен I = Σ Δ mi*ri2, где i принимает значение от 1 до n.
Эта формула является приближённой, так как точность зависит от массы частей и размера. Если кусочки, на которые разбивается тело, большие, считать их материальными точками нельзя. Чем мельче части, тем точнее будет результат. В соответствии с математическим анализом такие задачи решаются с помощью интегрирования. Понимая физический смысл момента инерции, можно отметить следующие зависимости:
- прямая пропорциональность массе;
- соответствие квадрату размера;
- изменение с учетом оси вращения.
Роль последнего пункта огромна. Например, если рассмотреть два момента вращения велосипедной спицы диаметром 2 мм и длиной 30 сантиметров, то можно увидеть зависимость от выбранной оси поворота.
Относительно вертикальной оси вращение обозначим I1, горизонтальной — I2. Подставив в формулы выражения, используемые для расчётов, можно получить отношение I1/I2 = (m*l2/12) / ((m*d2/8). После его упрощения будет верна запись I1/ I2 = (2/3)*(l/d)2. В итоге получится ответ 15000. Получается, если спицу будут закручивать с одинаковым моментом вокруг вертикальной оси и горизонтальной, то в первом случае она станет крутиться в 15 тыс. раз быстрее.
Моменты простейших объектов
Проведение интегрирования — довольно трудная операция, предполагающая хорошее знание высшей математики. Существует таблица, в которой собраны вычисления инерции для простейших геометрических фигур. При взятии сведений из неё важно обращать внимание на то, относительно какой оси приводится момент вращения объекта. Характеристика инерции для наиболее используемых объектов в физике имеет следующий вид:
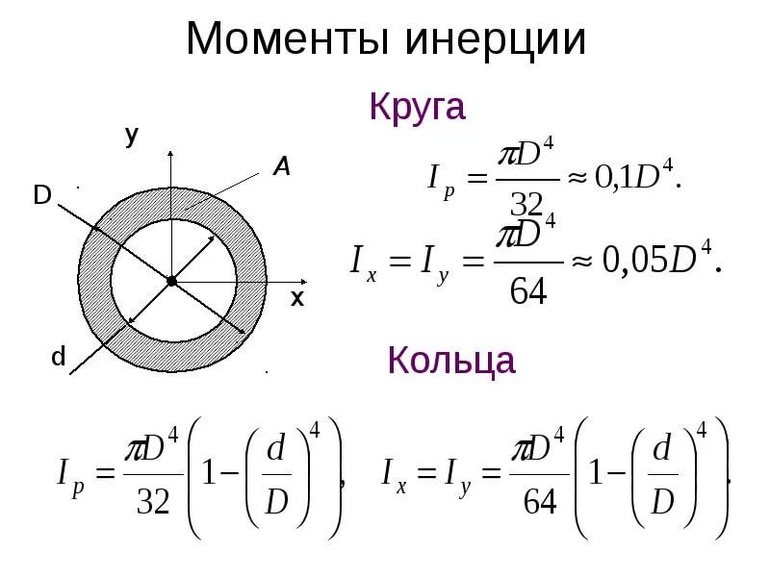
- Кольцо. Предположив, что точка имеет симметричное значение с противоположной стороны оси, можно утверждать, что формула не изменится. Если же точку распределить по плоскости перпендикулярной оси, то получится кольцо. Оно будет иметь такую же массу с кусками, находящимися на одинаковом расстоянии от центра r. Вычисление момента относительно оси вращения выполняют по той же формуле, что и для материальной точки: I = m * r2.
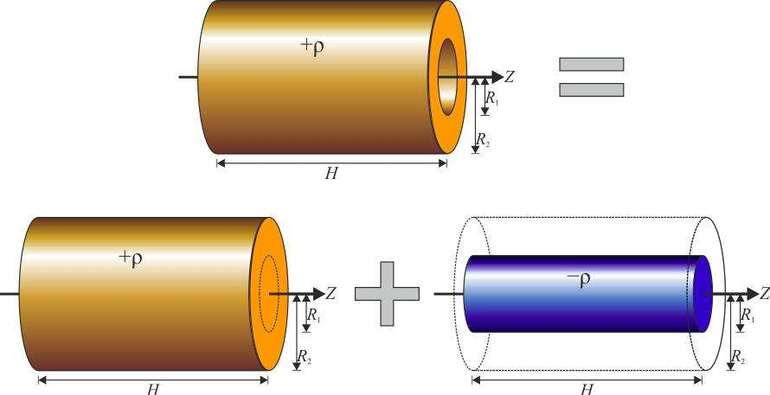
- Тонкостенный цилиндр. Нарисовав такую фигуру и указав на ней ось вращения, массу и радиус, несложно будет увидеть, что формула для нахождения момента будет аналогична кольцу.
- Диск. Вращение его происходит относительно оси, проходящей через его центр. Учитывая, что масса однородного диска распределена по всей его площади, то момент его будет меньше, чем у кольца. Проведённые расчёты показали, что момент диска будет меньше в два раза. Таким образом, формула выглядит как I = m*r2 / 2.
- Сплошной цилиндр. Получают такую фигуру простым распределением массы сплошного диска вдоль оси. По аналогии с кольцом расчёт его характеристики инерции будет совпадать с однородным диском.
- Шар. Момент проходящей оси через центр тяжести равен удвоенному произведению m*r2, разделенному на 5: I = (m*r2) * 2/5.
- Сфера. Такой объект отличается от шара лишь тем, что внутри он полый. Направление вращения оси происходит через центр. Значение параметра для неё будет больше, чем шара, так как масса собрана не статически в одном месте, а размещена по всей поверхности. Расчёты показывают, что найти момент можно по формуле I =2*m*r2 /3.
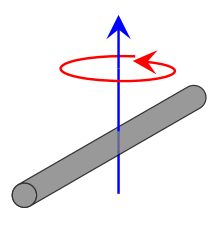
- Стержень. Момент вращения проходит через центр вдоль оси, перпендикулярной стержню: I = (1/12) * m*L2. L — длина стержня.
При использовании этих формул необходимо учитывать, что единицей измерения момента инерции является кг* м², поэтому при расчёте величины следует приводить значения к этим единицам.
Теорема Гюйгенса — Штейнера
Теорема была названа в честь двух математиков, давших формулировку определению характеристики параллельных осей. Например, пусть имеется объект произвольной формы, центробежная сила которого известна. Используя формулу Штейнера, можно вычислить момент тела относительно любой оси параллельной линии, проходящей через середину фигуры. В своём выводе учёные опирались на две формулы:
- Вычисления координаты центра масс: X = (m1*x1 + m2*x2+…+Mi*Xi) / (m1+m2+…+Mi) = (Σ Δ mi*ri 2)/ m.
- Универсального расчёта инерции любого тела: I = Σ Δ mi*ri 2.
Обозначив центр произвольной оси буквой O, а один из множества кусков — Δm, можно воспользоваться универсальной формулой. Сначала необходимо определить квадрат расстояния до оси вращения ri. Для этого через центр проведём ось Oц, а расстояние между O и Oц обозначим как d.
Указанные значения нужно выразить через координаты кусочка. Для этого строится ось абсциссы, проходящая через Oц, и ординаты — O. При таком выборе направления начала координат x центр масс равняется d, а у — нулю. Фактически получится прямоугольный треугольник. Воспользовавшись теоремой Пифагора, можно записать: I = Σ Δ mi* (xi2 + yi2).
В результате можно отметить, что момент в точке O будет прямо пропорционален расстоянию между Δ m и центром. Это и есть главный вектор на чертеже. Для его обозначения вводится длина r’.
Находится ri’2 по формулам для прямоугольного треугольника, в котором один катет равняется yi, а другой — xi — Oц. Значение ri’ совпадает с длиной гипотенузы. Таким образом, ri’2 = (xi — Oц)2 + yi2. Подставив полученное равенство в формулу нахождения параметра момента в центре, можно получить следующую формулу: Io = Σ Δ mi* ((xi — Oц)2 + yi2). После ряда подстановок и упрощения выражения в итоге получится равенство Io = I + m*x i2 — 2*m*xi2 = I — m*xi2.
Так как x центра масс совпадает с d, расстоянием между осями, одну из которых можно направить через центр, то формулу можно переписать как Io = I — m*d2. Выразив из выражения произвольный момент, формула Штейнера примет вид I = Io + m*d2.
Другими словами, теорема определяет, что характеристика инерции тела относительно любой оси находится как сумма моментов относительно параллельной оси, пересекающей центр масс, и произведению массы тела на квадрат расстояния между осями. Сопротивлением вращению пренебрегают.
Пример задачи
Допустим, есть монета с массой m и радиусом r. Вращение происходит вокруг оси, распложенной по касательной. Необходимо найти момент вращения.
Для этого нужно знать характеристику прямой, пересекающей центр монеты Io. Решение будет определяться суммой Io и расстоянием от центра до касательной, которая равняется диаметру монеты: I = Io + md2. Фактически задача состоит в нахождении Io. Определяется этот параметр согласно теореме о взаимно перпендикулярных осях.
Момент вращения относительно диска определяется с помощью выражения I1 = m* d2 / 2. Для решения задачи она будет выглядеть Io = m* d2 / 4. Подставив все данные, получим: I = (1m*d2 / 4) + (md)2 = 5*m*d2 /4.
For the quantity also known as the «area moment of inertia», see Second moment of area.
| Moment of inertia | |
|---|---|

Flywheels have large moments of inertia to smooth out changes in rates of rotational motion. |
|
|
Common symbols |
I |
| SI unit | kg⋅m2 |
|
Other units |
lbf·ft·s2 |
|
Derivations from |
 |
| Dimension | M L2 |


To improve their maneuverability, war planes are designed to have smaller moments of inertia compared to commercial planes.
The moment of inertia, otherwise known as the mass moment of inertia, angular mass, second moment of mass, or most accurately, rotational inertia, of a rigid body is a quantity that determines the torque needed for a desired angular acceleration about a rotational axis, akin to how mass determines the force needed for a desired acceleration. It depends on the body’s mass distribution and the axis chosen, with larger moments requiring more torque to change the body’s rate of rotation.
It is an extensive (additive) property: for a point mass the moment of inertia is simply the mass times the square of the perpendicular distance to the axis of rotation. The moment of inertia of a rigid composite system is the sum of the moments of inertia of its component subsystems (all taken about the same axis). Its simplest definition is the second moment of mass with respect to distance from an axis.
For bodies constrained to rotate in a plane, only their moment of inertia about an axis perpendicular to the plane, a scalar value, matters. For bodies free to rotate in three dimensions, their moments can be described by a symmetric 3-by-3 matrix, with a set of mutually perpendicular principal axes for which this matrix is diagonal and torques around the axes act independently of each other.
Introduction[edit]
When a body is free to rotate around an axis, torque must be applied to change its angular momentum. The amount of torque needed to cause any given angular acceleration (the rate of change in angular velocity) is proportional to the moment of inertia of the body. Moments of inertia may be expressed in units of kilogram metre squared (kg·m2) in SI units and pound-foot-second squared (lbf·ft·s2) in imperial or US units.
The moment of inertia plays the role in rotational kinetics that mass (inertia) plays in linear kinetics—both characterize the resistance of a body to changes in its motion. The moment of inertia depends on how mass is distributed around an axis of rotation, and will vary depending on the chosen axis. For a point-like mass, the moment of inertia about some axis is given by  , where
, where  is the distance of the point from the axis, and
is the distance of the point from the axis, and  is the mass. For an extended rigid body, the moment of inertia is just the sum of all the small pieces of mass multiplied by the square of their distances from the axis in rotation. For an extended body of a regular shape and uniform density, this summation sometimes produces a simple expression that depends on the dimensions, shape and total mass of the object.
is the mass. For an extended rigid body, the moment of inertia is just the sum of all the small pieces of mass multiplied by the square of their distances from the axis in rotation. For an extended body of a regular shape and uniform density, this summation sometimes produces a simple expression that depends on the dimensions, shape and total mass of the object.
In 1673 Christiaan Huygens introduced this parameter in his study of the oscillation of a body hanging from a pivot, known as a compound pendulum.[1] The term moment of inertia («momentum inertiae» in Latin) was introduced by Leonhard Euler in his book Theoria motus corporum solidorum seu rigidorum in 1765,[1][2] and it is incorporated into Euler’s second law.
The natural frequency of oscillation of a compound pendulum is obtained from the ratio of the torque imposed by gravity on the mass of the pendulum to the resistance to acceleration defined by the moment of inertia. Comparison of this natural frequency to that of a simple pendulum consisting of a single point of mass provides a mathematical formulation for moment of inertia of an extended body.[3][4]
The moment of inertia also appears in momentum, kinetic energy, and in Newton’s laws of motion for a rigid body as a physical parameter that combines its shape and mass. There is an interesting difference in the way moment of inertia appears in planar and spatial movement. Planar movement has a single scalar that defines the moment of inertia, while for spatial movement the same calculations yield a 3 × 3 matrix of moments of inertia, called the inertia matrix or inertia tensor.[5][6]
The moment of inertia of a rotating flywheel is used in a machine to resist variations in applied torque to smooth its rotational output. The moment of inertia of an airplane about its longitudinal, horizontal and vertical axes determine how steering forces on the control surfaces of its wings, elevators and rudder(s) affect the plane’s motions in roll, pitch and yaw.
Definition[edit]
The moment of inertia is defined as the product of mass of section and the square of the distance between the reference axis and the centroid of the section.

Video of rotating chair experiment, illustrating moment of inertia. When the spinning professor pulls his arms, his moment of inertia decreases; to conserve angular momentum, his angular velocity increases.
The moment of inertia I is also defined as the ratio of the net angular momentum L of a system to its angular velocity ω around a principal axis,[7][8] that is

If the angular momentum of a system is constant, then as the moment of inertia gets smaller, the angular velocity must increase. This occurs when spinning figure skaters pull in their outstretched arms or divers curl their bodies into a tuck position during a dive, to spin faster.[7][8][9][10][11][12][13]
If the shape of the body does not change, then its moment of inertia appears in Newton’s law of motion as the ratio of an applied torque τ on a body to the angular acceleration α around a principal axis, that is

For a simple pendulum, this definition yields a formula for the moment of inertia I in terms of the mass m of the pendulum and its distance r from the pivot point as,

Thus, the moment of inertia of the pendulum depends on both the mass m of a body and its geometry, or shape, as defined by the distance r to the axis of rotation.
This simple formula generalizes to define moment of inertia for an arbitrarily shaped body as the sum of all the elemental point masses dm each multiplied by the square of its perpendicular distance r to an axis k. An arbitrary object’s moment of inertia thus depends on the spatial distribution of its mass.
In general, given an object of mass m, an effective radius k can be defined, dependent on a particular axis of rotation, with such a value that its moment of inertia around the axis is

where k is known as the radius of gyration around the axis.
Examples[edit]
Simple pendulum[edit]
Mathematically, the moment of inertia of a simple pendulum is the ratio of the torque due to gravity about the pivot of a pendulum to its angular acceleration about that pivot point. For a simple pendulum this is found to be the product of the mass of the particle with the square of its distance to the pivot, that is
This can be shown as follows: The force of gravity on the mass of a simple pendulum generates a torque  around the axis perpendicular to the plane of the pendulum movement. Here
around the axis perpendicular to the plane of the pendulum movement. Here  is the distance vector from the torque axis to the pendulum center of mass, and
is the distance vector from the torque axis to the pendulum center of mass, and  is the net force on the mass. Associated with this torque is an angular acceleration,
is the net force on the mass. Associated with this torque is an angular acceleration,  , of the string and mass around this axis. Since the mass is constrained to a circle the tangential acceleration of the mass is
, of the string and mass around this axis. Since the mass is constrained to a circle the tangential acceleration of the mass is  . Since
. Since  the torque equation becomes:
the torque equation becomes:

where  is a unit vector perpendicular to the plane of the pendulum. (The second to last step uses the vector triple product expansion with the perpendicularity of and .) The quantity
is a unit vector perpendicular to the plane of the pendulum. (The second to last step uses the vector triple product expansion with the perpendicularity of and .) The quantity  is the moment of inertia of this single mass around the pivot point.
is the moment of inertia of this single mass around the pivot point.
The quantity also appears in the angular momentum of a simple pendulum, which is calculated from the velocity  of the pendulum mass around the pivot, where
of the pendulum mass around the pivot, where  is the angular velocity of the mass about the pivot point. This angular momentum is given by
is the angular velocity of the mass about the pivot point. This angular momentum is given by

using a similar derivation to the previous equation.
Similarly, the kinetic energy of the pendulum mass is defined by the velocity of the pendulum around the pivot to yield

This shows that the quantity is how mass combines with the shape of a body to define rotational inertia. The moment of inertia of an arbitrarily shaped body is the sum of the values for all of the elements of mass in the body.
Compound pendulums[edit]

Pendulums used in Mendenhall gravimeter apparatus, from 1897 scientific journal. The portable gravimeter developed in 1890 by Thomas C. Mendenhall provided the most accurate relative measurements of the local gravitational field of the Earth.
A compound pendulum is a body formed from an assembly of particles of continuous shape that rotates rigidly around a pivot. Its moment of inertia is the sum of the moments of inertia of each of the particles that it is composed of.[14][15]: 395–396 [16]: 51–53 The natural frequency ( ) of a compound pendulum depends on its moment of inertia,
) of a compound pendulum depends on its moment of inertia,  ,
,

where is the mass of the object,  is local acceleration of gravity, and is the distance from the pivot point to the center of mass of the object. Measuring this frequency of oscillation over small angular displacements provides an effective way of measuring moment of inertia of a body.[17]: 516–517
is local acceleration of gravity, and is the distance from the pivot point to the center of mass of the object. Measuring this frequency of oscillation over small angular displacements provides an effective way of measuring moment of inertia of a body.[17]: 516–517
Thus, to determine the moment of inertia of the body, simply suspend it from a convenient pivot point  so that it swings freely in a plane perpendicular to the direction of the desired moment of inertia, then measure its natural frequency or period of oscillation (
so that it swings freely in a plane perpendicular to the direction of the desired moment of inertia, then measure its natural frequency or period of oscillation ( ), to obtain
), to obtain

where is the period (duration) of oscillation (usually averaged over multiple periods).
Center of oscillation[edit]
A simple pendulum that has the same natural frequency as a compound pendulum defines the length  from the pivot to a point called the center of oscillation of the compound pendulum. This point also corresponds to the center of percussion. The length is determined from the formula,
from the pivot to a point called the center of oscillation of the compound pendulum. This point also corresponds to the center of percussion. The length is determined from the formula,

or

The seconds pendulum, which provides the «tick» and «tock» of a grandfather clock, takes one second to swing from side-to-side. This is a period of two seconds, or a natural frequency of  for the pendulum. In this case, the distance to the center of oscillation, , can be computed to be
for the pendulum. In this case, the distance to the center of oscillation, , can be computed to be

Notice that the distance to the center of oscillation of the seconds pendulum must be adjusted to accommodate different values for the local acceleration of gravity. Kater’s pendulum is a compound pendulum that uses this property to measure the local acceleration of gravity, and is called a gravimeter.
Measuring moment of inertia[edit]
The moment of inertia of a complex system such as a vehicle or airplane around its vertical axis can be measured by suspending the system from three points to form a trifilar pendulum. A trifilar pendulum is a platform supported by three wires designed to oscillate in torsion around its vertical centroidal axis.[18] The period of oscillation of the trifilar pendulum yields the moment of inertia of the system.[19]
Moment of inertia of area[edit]
Moment of inertia of area is also known as the second moment of area.
These calculations are commonly used in civil engineering for structural design of beams and columns. Cross-sectional areas calculated for vertical moment of the x-axis  and horizontal moment of the y-axis
and horizontal moment of the y-axis  .
.
Height (h) and breadth (b) are the linear measures, except for circles, which are effectively half-breadth derived,
Sectional areas moment calculated thus[20][edit]
- Square:

- Rectangular: and;
- Triangular:
- Circular:





Motion in a fixed plane[edit]
Point mass[edit]
Four objects with identical masses and radii racing down a plane while rolling without slipping.
From back to front:
- spherical shell,
- solid sphere,
- cylindrical ring, and
- solid cylinder.
The time for each object to reach the finishing line depends on their moment of inertia. (OGV version)
The moment of inertia about an axis of a body is calculated by summing for every particle in the body, where is the perpendicular distance to the specified axis. To see how moment of inertia arises in the study of the movement of an extended body, it is convenient to consider a rigid assembly of point masses. (This equation can be used for axes that are not principal axes provided that it is understood that this does not fully describe the moment of inertia.[21])
Consider the kinetic energy of an assembly of  masses
masses  that lie at the distances
that lie at the distances  from the pivot point , which is the nearest point on the axis of rotation. It is the sum of the kinetic energy of the individual masses,[17]: 516–517 [22]: 1084–1085 [22]: 1296–1300
from the pivot point , which is the nearest point on the axis of rotation. It is the sum of the kinetic energy of the individual masses,[17]: 516–517 [22]: 1084–1085 [22]: 1296–1300

This shows that the moment of inertia of the body is the sum of each of the terms, that is

Thus, moment of inertia is a physical property that combines the mass and distribution of the particles around the rotation axis. Notice that rotation about different axes of the same body yield different moments of inertia.
The moment of inertia of a continuous body rotating about a specified axis is calculated in the same way, except with infinitely many point particles. Thus the limits of summation are removed, and the sum is written as follows:

Another expression replaces the summation with an integral,

Here, the function  gives the mass density at each point
gives the mass density at each point  , is a vector perpendicular to the axis of rotation and extending from a point on the rotation axis to a point in the solid, and the integration is evaluated over the volume
, is a vector perpendicular to the axis of rotation and extending from a point on the rotation axis to a point in the solid, and the integration is evaluated over the volume  of the body
of the body  . The moment of inertia of a flat surface is similar with the mass density being replaced by its areal mass density with the integral evaluated over its area.
. The moment of inertia of a flat surface is similar with the mass density being replaced by its areal mass density with the integral evaluated over its area.
Note on second moment of area: The moment of inertia of a body moving in a plane and the second moment of area of a beam’s cross-section are often confused. The moment of inertia of a body with the shape of the cross-section is the second moment of this area about the  -axis perpendicular to the cross-section, weighted by its density. This is also called the polar moment of the area, and is the sum of the second moments about the
-axis perpendicular to the cross-section, weighted by its density. This is also called the polar moment of the area, and is the sum of the second moments about the  — and
— and  -axes.[23] The stresses in a beam are calculated using the second moment of the cross-sectional area around either the -axis or -axis depending on the load.
-axes.[23] The stresses in a beam are calculated using the second moment of the cross-sectional area around either the -axis or -axis depending on the load.
Examples[edit]
The moment of inertia of a compound pendulum constructed from a thin disc mounted at the end of a thin rod that oscillates around a pivot at the other end of the rod, begins with the calculation of the moment of inertia of the thin rod and thin disc about their respective centers of mass.[22]
A list of moments of inertia formulas for standard body shapes provides a way to obtain the moment of inertia of a complex body as an assembly of simpler shaped bodies. The parallel axis theorem is used to shift the reference point of the individual bodies to the reference point of the assembly.
As one more example, consider the moment of inertia of a solid sphere of constant density about an axis through its center of mass. This is determined by summing the moments of inertia of the thin discs that can form the sphere whose centers are along the axis chosen for consideration. If the surface of the ball is defined by the equation[22]: 1301

then the square of the radius of the disc at the cross-section along the -axis is

Therefore, the moment of inertia of the ball is the sum of the moments of inertia of the discs along the -axis,
![{displaystyle {begin{aligned}I_{C,{text{ball}}}&=int _{-R}^{R}{frac {pi rho }{2}}r(z)^{4},dz=int _{-R}^{R}{frac {pi rho }{2}}left(R^{2}-z^{2}right)^{2},dz\&={frac {pi rho }{2}}left[R^{4}z-{frac {2}{3}}R^{2}z^{3}+{frac {1}{5}}z^{5}right]_{-R}^{R}\&=pi rho left(1-{frac {2}{3}}+{frac {1}{5}}right)R^{5}\&={frac {2}{5}}mR^{2},end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/42e610139e74980c31f979cff68d8cdd3684dd05)
where  is the mass of the sphere.
is the mass of the sphere.
Rigid body[edit]

The cylinders with higher moment of inertia roll down a slope with a smaller acceleration, as more of their potential energy needs to be converted into the rotational kinetic energy.
If a mechanical system is constrained to move parallel to a fixed plane, then the rotation of a body in the system occurs around an axis parallel to this plane. In this case, the moment of inertia of the mass in this system is a scalar known as the polar moment of inertia. The definition of the polar moment of inertia can be obtained by considering momentum, kinetic energy and Newton’s laws for the planar movement of a rigid system of particles.[14][17][24][25]
If a system of  particles,
particles,  , are assembled into a rigid body, then the momentum of the system can be written in terms of positions relative to a reference point
, are assembled into a rigid body, then the momentum of the system can be written in terms of positions relative to a reference point  , and absolute velocities
, and absolute velocities  :
:

where is the angular velocity of the system and  is the velocity of .
is the velocity of .
For planar movement the angular velocity vector is directed along the unit vector  which is perpendicular to the plane of movement. Introduce the unit vectors
which is perpendicular to the plane of movement. Introduce the unit vectors  from the reference point to a point
from the reference point to a point  , and the unit vector
, and the unit vector  , so
, so

This defines the relative position vector and the velocity vector for the rigid system of the particles moving in a plane.
Note on the cross product: When a body moves parallel to a ground plane, the trajectories of all the points in the body lie in planes parallel to this ground plane. This means that any rotation that the body undergoes must be around an axis perpendicular to this plane. Planar movement is often presented as projected onto this ground plane so that the axis of rotation appears as a point. In this case, the angular velocity and angular acceleration of the body are scalars and the fact that they are vectors along the rotation axis is ignored. This is usually preferred for introductions to the topic. But in the case of moment of inertia, the combination of mass and geometry benefits from the geometric properties of the cross product. For this reason, in this section on planar movement the angular velocity and accelerations of the body are vectors perpendicular to the ground plane, and the cross product operations are the same as used for the study of spatial rigid body movement.
Angular momentum[edit]
The angular momentum vector for the planar movement of a rigid system of particles is given by[14][17]

Use the center of mass  as the reference point so
as the reference point so

and define the moment of inertia relative to the center of mass  as
as

then the equation for angular momentum simplifies to[22]: 1028

The moment of inertia about an axis perpendicular to the movement of the rigid system and through the center of mass is known as the polar moment of inertia. Specifically, it is the second moment of mass with respect to the orthogonal distance from an axis (or pole).
For a given amount of angular momentum, a decrease in the moment of inertia results in an increase in the angular velocity. Figure skaters can change their moment of inertia by pulling in their arms. Thus, the angular velocity achieved by a skater with outstretched arms results in a greater angular velocity when the arms are pulled in, because of the reduced moment of inertia. A figure skater is not, however, a rigid body.
Kinetic energy[edit]

This 1906 rotary shear uses the moment of inertia of two flywheels to store kinetic energy which when released is used to cut metal stock (International Library of Technology, 1906).
The kinetic energy of a rigid system of particles moving in the plane is given by[14][17]

Let the reference point be the center of mass of the system so the second term becomes zero, and introduce the moment of inertia so the kinetic energy is given by[22]: 1084

The moment of inertia is the polar moment of inertia of the body.
Newton’s laws[edit]

A 1920s John Deere tractor with the spoked flywheel on the engine. The large moment of inertia of the flywheel smooths the operation of the tractor.
Newton’s laws for a rigid system of particles, , can be written in terms of a resultant force and torque at a reference point , to yield[14][17]

where denotes the trajectory of each particle.
The kinematics of a rigid body yields the formula for the acceleration of the particle  in terms of the position and acceleration
in terms of the position and acceleration  of the reference particle as well as the angular velocity vector and angular acceleration vector of the rigid system of particles as,
of the reference particle as well as the angular velocity vector and angular acceleration vector of the rigid system of particles as,

For systems that are constrained to planar movement, the angular velocity and angular acceleration vectors are directed along perpendicular to the plane of movement, which simplifies this acceleration equation. In this case, the acceleration vectors can be simplified by introducing the unit vectors  from the reference point to a point and the unit vectors , so
from the reference point to a point and the unit vectors , so

This yields the resultant torque on the system as

where  , and
, and  is the unit vector perpendicular to the plane for all of the particles .
is the unit vector perpendicular to the plane for all of the particles .
Use the center of mass as the reference point and define the moment of inertia relative to the center of mass , then the equation for the resultant torque simplifies to[22]: 1029

Motion in space of a rigid body, and the inertia matrix[edit]
The scalar moments of inertia appear as elements in a matrix when a system of particles is assembled into a rigid body that moves in three-dimensional space. This inertia matrix appears in the calculation of the angular momentum, kinetic energy and resultant torque of the rigid system of particles.[3][4][5][6][26]
Let the system of particles, be located at the coordinates with velocities relative to a fixed reference frame. For a (possibly moving) reference point , the relative positions are

and the (absolute) velocities are

where is the angular velocity of the system, and  is the velocity of .
is the velocity of .
Angular momentum[edit]
Note that the cross product can be equivalently written as matrix multiplication by combining the first operand and the operator into a skew-symmetric matrix, ![{displaystyle left[mathbf {b} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2ce9643510bd433e0ed612edd5d3a9ed7faecfec) , constructed from the components of
, constructed from the components of  :
:
![{displaystyle {begin{aligned}mathbf {b} times mathbf {y} &equiv left[mathbf {b} right]mathbf {y} \left[mathbf {b} right]&equiv {begin{bmatrix}0&-b_{z}&b_{y}\b_{z}&0&-b_{x}\-b_{y}&b_{x}&0end{bmatrix}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b4782eb664e98a6d680dd96b77601ff9bc12ab4a)
The inertia matrix is constructed by considering the angular momentum, with the reference point of the body chosen to be the center of mass :[3][6]

where the terms containing ( ) sum to zero by the definition of center of mass.
) sum to zero by the definition of center of mass.
Then, the skew-symmetric matrix ![{displaystyle [Delta mathbf {r} _{i}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3ee5960e77611f673ab2f2050f356dbf0e403132) obtained from the relative position vector
obtained from the relative position vector  , can be used to define,
, can be used to define,
![{displaystyle mathbf {L} =left(-sum _{i=1}^{n}m_{i}left[Delta mathbf {r} _{i}right]^{2}right){boldsymbol {omega }}=mathbf {I} _{mathbf {C} }{boldsymbol {omega }},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/26ff4f4ab9aa3fff11085b8828fc71a4af7de700)
where  defined by
defined by
![{displaystyle mathbf {I} _{mathbf {C} }=-sum _{i=1}^{n}m_{i}left[Delta mathbf {r} _{i}right]^{2},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6766e8a9ce07ff8f32ec86aaa929f1e5a3ce1a21)
is the symmetric inertia matrix of the rigid system of particles measured relative to the center of mass .
Kinetic energy[edit]
The kinetic energy of a rigid system of particles can be formulated in terms of the center of mass and a matrix of mass moments of inertia of the system. Let the system of particles be located at the coordinates with velocities , then the kinetic energy is[3][6]

where is the position vector of a particle relative to the center of mass.
This equation expands to yield three terms

Since the center of mass is defined by

, the second term in this equation is zero. Introduce the skew-symmetric matrix so the kinetic energy becomes
![{displaystyle {begin{aligned}E_{text{K}}&={frac {1}{2}}left(sum _{i=1}^{n}m_{i}left(left[Delta mathbf {r} _{i}right]{boldsymbol {omega }}right)cdot left(left[Delta mathbf {r} _{i}right]{boldsymbol {omega }}right)right)+{frac {1}{2}}left(sum _{i=1}^{n}m_{i}right)mathbf {V} _{mathbf {C} }cdot mathbf {V} _{mathbf {C} }\&={frac {1}{2}}left(sum _{i=1}^{n}m_{i}left({boldsymbol {omega }}^{mathsf {T}}left[Delta mathbf {r} _{i}right]^{mathsf {T}}left[Delta mathbf {r} _{i}right]{boldsymbol {omega }}right)right)+{frac {1}{2}}left(sum _{i=1}^{n}m_{i}right)mathbf {V} _{mathbf {C} }cdot mathbf {V} _{mathbf {C} }\&={frac {1}{2}}{boldsymbol {omega }}cdot left(-sum _{i=1}^{n}m_{i}left[Delta mathbf {r} _{i}right]^{2}right){boldsymbol {omega }}+{frac {1}{2}}left(sum _{i=1}^{n}m_{i}right)mathbf {V} _{mathbf {C} }cdot mathbf {V} _{mathbf {C} }.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2c246c5646e149b67a600084c164f154ec7dda89)
Thus, the kinetic energy of the rigid system of particles is given by

where is the inertia matrix relative to the center of mass and  is the total mass.
is the total mass.
Resultant torque[edit]
The inertia matrix appears in the application of Newton’s second law to a rigid assembly of particles. The resultant torque on this system is,[3][6]

where  is the acceleration of the particle . The kinematics of a rigid body yields the formula for the acceleration of the particle in terms of the position and acceleration
is the acceleration of the particle . The kinematics of a rigid body yields the formula for the acceleration of the particle in terms of the position and acceleration  of the reference point, as well as the angular velocity vector and angular acceleration vector of the rigid system as,
of the reference point, as well as the angular velocity vector and angular acceleration vector of the rigid system as,

Use the center of mass as the reference point, and introduce the skew-symmetric matrix ![{displaystyle left[Delta mathbf {r} _{i}right]=left[mathbf {r} _{i}-mathbf {C} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b83ab9af0efe0f59204a493b10b5eb453594c19) to represent the cross product
to represent the cross product  , to obtain
, to obtain
![{displaystyle {boldsymbol {tau }}=left(-sum _{i=1}^{n}m_{i}left[Delta mathbf {r} _{i}right]^{2}right){boldsymbol {alpha }}+{boldsymbol {omega }}times left(-sum _{i=1}^{n}m_{i}left[Delta mathbf {r} _{i}right]^{2}right){boldsymbol {omega }}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b93d7ec560fb15fbaaba36a2fd0869da807fd92e)
The calculation uses the identity

obtained from the Jacobi identity for the triple cross product as shown in the proof below:
Proof
![{displaystyle {begin{aligned}{boldsymbol {tau }}&=sum _{i=1}^{n}(mathbf {r_{i}} -mathbf {R} )times (m_{i}mathbf {a} _{i})\&=sum _{i=1}^{n}{boldsymbol {Delta }}mathbf {r} _{i}times (m_{i}mathbf {a} _{i})\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times mathbf {a} _{i}];ldots {text{ cross-product scalar multiplication}}\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times (mathbf {a} _{{text{tangential}},i}+mathbf {a} _{{text{centripetal}},i}+mathbf {A} _{mathbf {R} })]\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times (mathbf {a} _{{text{tangential}},i}+mathbf {a} _{{text{centripetal}},i}+0)]\&;;;;;ldots ;mathbf {R} {text{ is either at rest or moving at a constant velocity but not accelerated, or }}\&;;;;;;;;;;;{text{the origin of the fixed (world) coordinate reference system is placed at the center of mass }}mathbf {C} \&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times mathbf {a} _{{text{tangential}},i}+{boldsymbol {Delta }}mathbf {r} _{i}times mathbf {a} _{{text{centripetal}},i}];ldots {text{ cross-product distributivity over addition}}\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times mathbf {v} _{{text{tangential}},i})]\{boldsymbol {tau }}&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))]\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3a1a1b0804a6cf8a550a81732385fca1083051df)
Then, the following Jacobi identity is used on the last term:
![{displaystyle {begin{aligned}0&={boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))+{boldsymbol {omega }}times (({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times {boldsymbol {Delta }}mathbf {r} _{i})+({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {omega }})\&={boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))+{boldsymbol {omega }}times (({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times {boldsymbol {Delta }}mathbf {r} _{i})+({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times -({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i});ldots {text{ cross-product anticommutativity}}\&={boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))+{boldsymbol {omega }}times (({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times {boldsymbol {Delta }}mathbf {r} _{i})+-[({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})];ldots {text{ cross-product scalar multiplication}}\&={boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))+{boldsymbol {omega }}times (({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times {boldsymbol {Delta }}mathbf {r} _{i})+-[0];ldots {text{ self cross-product}}\0&={boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))+{boldsymbol {omega }}times (({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times {boldsymbol {Delta }}mathbf {r} _{i})end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/88ab33d54b34674092a14d55c8ccefb765a2e7ae)
The result of applying Jacobi identity can then be continued as follows:
![{displaystyle {begin{aligned}{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))&=-[{boldsymbol {omega }}times (({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})times {boldsymbol {Delta }}mathbf {r} _{i})]\&=-[({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})({boldsymbol {omega }}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {omega }}cdot ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))];ldots {text{ vector triple product}}\&=-[({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})({boldsymbol {omega }}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot ({boldsymbol {omega }}times {boldsymbol {omega }}))];ldots {text{ scalar triple product}}\&=-[({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})({boldsymbol {omega }}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot (0))];ldots {text{ self cross-product}}\&=-[({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})({boldsymbol {omega }}cdot {boldsymbol {Delta }}mathbf {r} _{i})]\&=-[{boldsymbol {omega }}times ({boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {omega }}cdot {boldsymbol {Delta }}mathbf {r} _{i}))];ldots {text{ cross-product scalar multiplication}}\&={boldsymbol {omega }}times -({boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {omega }}cdot {boldsymbol {Delta }}mathbf {r} _{i}));ldots {text{ cross-product scalar multiplication}}\{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))&={boldsymbol {omega }}times -({boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }}));ldots {text{ dot-product commutativity}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bb1ab7d45bf04c0df3101e84282bc6695ddecf68)
The final result can then be substituted to the main proof as follows:
![{displaystyle {begin{aligned}{boldsymbol {tau }}&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i}))]\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times -({boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }}))]\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {0-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }})}]\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {[{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})]-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }})}];ldots ;{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})=0\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {[{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }})]-{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})}];ldots {text{ addition associativity}}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/66f6f583aacfd008f43218fc24e97547511a6a91)
![{displaystyle {begin{aligned}&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }})}-{boldsymbol {omega }}times {boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})];ldots {text{ cross-product distributivity over addition}}\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }})}-({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})({boldsymbol {omega }}times {boldsymbol {omega }})];ldots {text{ cross-product scalar multiplication}}\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }})}-({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})(0)];ldots {text{ self cross-product}}\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {{boldsymbol {omega }}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {Delta }}mathbf {r} _{i})-{boldsymbol {Delta }}mathbf {r} _{i}({boldsymbol {Delta }}mathbf {r} _{i}cdot {boldsymbol {omega }})}]\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {alpha }}times {boldsymbol {Delta }}mathbf {r} _{i})+{boldsymbol {omega }}times {{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {omega }}times {boldsymbol {Delta }}mathbf {r} _{i})}];ldots {text{ vector triple product}}\&=sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times -({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {alpha }})+{boldsymbol {omega }}times {{boldsymbol {Delta }}mathbf {r} _{i}times -({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {omega }})}];ldots {text{ cross-product anticommutativity}}\&=-sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {alpha }})+{boldsymbol {omega }}times {{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {omega }})}];ldots {text{ cross-product scalar multiplication}}\&=-sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {alpha }})]+-sum _{i=1}^{n}m_{i}[{boldsymbol {omega }}times {{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {omega }})}];ldots {text{ summation distributivity}}\{boldsymbol {tau }}&=-sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {alpha }})]+{boldsymbol {omega }}times -sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {omega }})];ldots ;{boldsymbol {omega }}{text{ is not characteristic of particle }}P_{i}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/adeb5bbad0d607e038f18398c83a2761c4af3102)
Notice that for any vector  , the following holds:
, the following holds:
![{displaystyle {begin{aligned}-sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times mathbf {u} )]&=-sum _{i=1}^{n}m_{i}left({begin{bmatrix}0&-Delta r_{3,i}&Delta r_{2,i}\Delta r_{3,i}&0&-Delta r_{1,i}\-Delta r_{2,i}&Delta r_{1,i}&0end{bmatrix}}left({begin{bmatrix}0&-Delta r_{3,i}&Delta r_{2,i}\Delta r_{3,i}&0&-Delta r_{1,i}\-Delta r_{2,i}&Delta r_{1,i}&0end{bmatrix}}{begin{bmatrix}u_{1}\u_{2}\u_{3}end{bmatrix}}right)right);ldots {text{ cross-product as matrix multiplication}}\[6pt]&=-sum _{i=1}^{n}m_{i}left({begin{bmatrix}0&-Delta r_{3,i}&Delta r_{2,i}\Delta r_{3,i}&0&-Delta r_{1,i}\-Delta r_{2,i}&Delta r_{1,i}&0end{bmatrix}}{begin{bmatrix}-Delta r_{3,i},u_{2}+Delta r_{2,i},u_{3}\+Delta r_{3,i},u_{1}-Delta r_{1,i},u_{3}\-Delta r_{2,i},u_{1}+Delta r_{1,i},u_{2}end{bmatrix}}right)\[6pt]&=-sum _{i=1}^{n}m_{i}{begin{bmatrix}-Delta r_{3,i}(+Delta r_{3,i},u_{1}-Delta r_{1,i},u_{3})+Delta r_{2,i}(-Delta r_{2,i},u_{1}+Delta r_{1,i},u_{2})\+Delta r_{3,i}(-Delta r_{3,i},u_{2}+Delta r_{2,i},u_{3})-Delta r_{1,i}(-Delta r_{2,i},u_{1}+Delta r_{1,i},u_{2})\-Delta r_{2,i}(-Delta r_{3,i},u_{2}+Delta r_{2,i},u_{3})+Delta r_{1,i}(+Delta r_{3,i},u_{1}-Delta r_{1,i},u_{3})end{bmatrix}}\[6pt]&=-sum _{i=1}^{n}m_{i}{begin{bmatrix}-Delta r_{3,i}^{2},u_{1}+Delta r_{1,i}Delta r_{3,i},u_{3}-Delta r_{2,i}^{2},u_{1}+Delta r_{1,i}Delta r_{2,i},u_{2}\-Delta r_{3,i}^{2},u_{2}+Delta r_{2,i}Delta r_{3,i},u_{3}+Delta r_{2,i}Delta r_{1,i},u_{1}-Delta r_{1,i}^{2},u_{2}\+Delta r_{3,i}Delta r_{2,i},u_{2}-Delta r_{2,i}^{2},u_{3}+Delta r_{3,i}Delta r_{1,i},u_{1}-Delta r_{1,i}^{2},u_{3}end{bmatrix}}\[6pt]&=-sum _{i=1}^{n}m_{i}{begin{bmatrix}-(Delta r_{2,i}^{2}+Delta r_{3,i}^{2}),u_{1}+Delta r_{1,i}Delta r_{2,i},u_{2}+Delta r_{1,i}Delta r_{3,i},u_{3}\+Delta r_{2,i}Delta r_{1,i},u_{1}-(Delta r_{1,i}^{2}+Delta r_{3,i}^{2}),u_{2}+Delta r_{2,i}Delta r_{3,i},u_{3}\+Delta r_{3,i}Delta r_{1,i},u_{1}+Delta r_{3,i}Delta r_{2,i},u_{2}-(Delta r_{1,i}^{2}+Delta r_{2,i}^{2}),u_{3}end{bmatrix}}\[6pt]&=-sum _{i=1}^{n}m_{i}{begin{bmatrix}-(Delta r_{2,i}^{2}+Delta r_{3,i}^{2})&Delta r_{1,i}Delta r_{2,i}&Delta r_{1,i}Delta r_{3,i}\Delta r_{2,i}Delta r_{1,i}&-(Delta r_{1,i}^{2}+Delta r_{3,i}^{2})&Delta r_{2,i}Delta r_{3,i}\Delta r_{3,i}Delta r_{1,i}&Delta r_{3,i}Delta r_{2,i}&-(Delta r_{1,i}^{2}+Delta r_{2,i}^{2})end{bmatrix}}{begin{bmatrix}u_{1}\u_{2}\u_{3}end{bmatrix}}\&=-sum _{i=1}^{n}m_{i}[Delta r_{i}]^{2}mathbf {u} \[6pt]-sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times mathbf {u} )]&=left(-sum _{i=1}^{n}m_{i}[Delta r_{i}]^{2}right)mathbf {u} ;ldots ;mathbf {u} {text{ is not characteristic of }}P_{i}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/059812b4501e0672712b5b7adff834e79c3b4bff)
Finally, the result is used to complete the main proof as follows:
![{displaystyle {begin{aligned}{boldsymbol {tau }}&=-sum _{i=1}^{n}m_{i}[{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {alpha }})]+{boldsymbol {omega }}times -sum _{i=1}^{n}m_{i}{boldsymbol {Delta }}mathbf {r} _{i}times ({boldsymbol {Delta }}mathbf {r} _{i}times {boldsymbol {omega }})]\&=left(-sum _{i=1}^{n}m_{i}[Delta r_{i}]^{2}right){boldsymbol {alpha }}+{boldsymbol {omega }}times left(-sum _{i=1}^{n}m_{i}[Delta r_{i}]^{2}right){boldsymbol {omega }}end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0971bbc71e7ceb3c810afa1043b08aca54608486)
Thus, the resultant torque on the rigid system of particles is given by

where is the inertia matrix relative to the center of mass.
Parallel axis theorem[edit]
The inertia matrix of a body depends on the choice of the reference point. There is a useful relationship between the inertia matrix relative to the center of mass and the inertia matrix relative to another point . This relationship is called the parallel axis theorem.[3][6]
Consider the inertia matrix  obtained for a rigid system of particles measured relative to a reference point , given by
obtained for a rigid system of particles measured relative to a reference point , given by
![{displaystyle mathbf {I} _{mathbf {R} }=-sum _{i=1}^{n}m_{i}left[mathbf {r} _{i}-mathbf {R} right]^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/93e62233b3acff4fc919fc24e8d6241551543087)
Let be the center of mass of the rigid system, then

where  is the vector from the center of mass to the reference point . Use this equation to compute the inertia matrix,
is the vector from the center of mass to the reference point . Use this equation to compute the inertia matrix,
![{displaystyle mathbf {I} _{mathbf {R} }=-sum _{i=1}^{n}m_{i}[mathbf {r} _{i}-left(mathbf {C} +mathbf {d} right)]^{2}=-sum _{i=1}^{n}m_{i}[left(mathbf {r} _{i}-mathbf {C} right)-mathbf {d} ]^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/0063409d605348215928372e62f294287f06fb98)
Distribute over the cross product to obtain
![{displaystyle mathbf {I} _{mathbf {R} }=-left(sum _{i=1}^{n}m_{i}[mathbf {r} _{i}-mathbf {C} ]^{2}right)+left(sum _{i=1}^{n}m_{i}[mathbf {r} _{i}-mathbf {C} ]right)[mathbf {d} ]+[mathbf {d} ]left(sum _{i=1}^{n}m_{i}[mathbf {r} _{i}-mathbf {C} ]right)-left(sum _{i=1}^{n}m_{i}right)[mathbf {d} ]^{2}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/68eee7fefe0e716823fd5d80384303b8aef58b99)
The first term is the inertia matrix relative to the center of mass. The second and third terms are zero by definition of the center of mass . And the last term is the total mass of the system multiplied by the square of the skew-symmetric matrix ![{displaystyle [mathbf {d} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a5785dcf9605fb6ace7c1a8c8b4d6b365af48366) constructed from .
constructed from .
The result is the parallel axis theorem,
![{displaystyle mathbf {I} _{mathbf {R} }=mathbf {I} _{mathbf {C} }-M[mathbf {d} ]^{2},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1c59b0848c4b1d69fff75c4257005225cd42c74d)
where is the vector from the center of mass to the reference point .
Note on the minus sign: By using the skew symmetric matrix of position vectors relative to the reference point, the inertia matrix of each particle has the form ![{displaystyle -mleft[mathbf {r} right]^{2}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6b3ed54432828b43d6ae23e9a2e9c009c7336024) , which is similar to the that appears in planar movement. However, to make this to work out correctly a minus sign is needed. This minus sign can be absorbed into the term
, which is similar to the that appears in planar movement. However, to make this to work out correctly a minus sign is needed. This minus sign can be absorbed into the term ![{displaystyle mleft[mathbf {r} right]^{mathsf {T}}left[mathbf {r} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/27fed5e06e85cd3d74847c333b7a32cbd6a31fe7) , if desired, by using the skew-symmetry property of
, if desired, by using the skew-symmetry property of ![{displaystyle [mathbf {r} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/ba4c4e0b7a62e35392117d1331b60c9e3276b5c9) .
.
Scalar moment of inertia in a plane[edit]
The scalar moment of inertia,  , of a body about a specified axis whose direction is specified by the unit vector and passes through the body at a point is as follows:[6]
, of a body about a specified axis whose direction is specified by the unit vector and passes through the body at a point is as follows:[6]
![{displaystyle I_{L}=mathbf {hat {k}} cdot left(-sum _{i=1}^{N}m_{i}left[Delta mathbf {r} _{i}right]^{2}right)mathbf {hat {k}} =mathbf {hat {k}} cdot mathbf {I} _{mathbf {R} }mathbf {hat {k}} =mathbf {hat {k}} ^{mathsf {T}}mathbf {I} _{mathbf {R} }mathbf {hat {k}} ,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/78bb7c062959fd615347939341b32bf66de221c6)
where is the moment of inertia matrix of the system relative to the reference point , and is the skew symmetric matrix obtained from the vector .
This is derived as follows. Let a rigid assembly of particles, , have coordinates . Choose as a reference point and compute the moment of inertia around a line L defined by the unit vector through the reference point ,  . The perpendicular vector from this line to the particle is obtained from
. The perpendicular vector from this line to the particle is obtained from  by removing the component that projects onto .
by removing the component that projects onto .

where  is the identity matrix, so as to avoid confusion with the inertia matrix, and
is the identity matrix, so as to avoid confusion with the inertia matrix, and  is the outer product matrix formed from the unit vector along the line .
is the outer product matrix formed from the unit vector along the line .
To relate this scalar moment of inertia to the inertia matrix of the body, introduce the skew-symmetric matrix ![{displaystyle left[mathbf {hat {k}} right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a515c7495954477be07dee4f29d4c4c4ec50cf98) such that
such that ![{displaystyle left[mathbf {hat {k}} right]mathbf {y} =mathbf {hat {k}} times mathbf {y} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/10d1281a399f50084c4d71e516f5d56b1cf5426f) , then we have the identity
, then we have the identity
![{displaystyle -left[mathbf {hat {k}} right]^{2}equiv left|mathbf {hat {k}} right|^{2}left(mathbf {E} -mathbf {hat {k}} mathbf {hat {k}} ^{mathsf {T}}right)=mathbf {E} -mathbf {hat {k}} mathbf {hat {k}} ^{mathsf {T}},}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d92be0b3adbb50fbe61b31dc0237f0fc102476a0)
noting that is a unit vector.
The magnitude squared of the perpendicular vector is
![{displaystyle {begin{aligned}left|Delta mathbf {r} _{i}^{perp }right|^{2}&=left(-left[mathbf {hat {k}} right]^{2}Delta mathbf {r} _{i}right)cdot left(-left[mathbf {hat {k}} right]^{2}Delta mathbf {r} _{i}right)\&=left(mathbf {hat {k}} times left(mathbf {hat {k}} times Delta mathbf {r} _{i}right)right)cdot left(mathbf {hat {k}} times left(mathbf {hat {k}} times Delta mathbf {r} _{i}right)right)end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9d205a6da935ecfa8f5e13feb1a930f1d032022a)
The simplification of this equation uses the triple scalar product identity

where the dot and the cross products have been interchanged. Exchanging products, and simplifying by noting that and are orthogonal:
![{displaystyle {begin{aligned}&left(mathbf {hat {k}} times left(mathbf {hat {k}} times Delta mathbf {r} _{i}right)right)cdot left(mathbf {hat {k}} times left(mathbf {hat {k}} times Delta mathbf {r} _{i}right)right)\={}&left(left(mathbf {hat {k}} times left(mathbf {hat {k}} times Delta mathbf {r} _{i}right)right)times mathbf {hat {k}} right)cdot left(mathbf {hat {k}} times Delta mathbf {r} _{i}right)\={}&left(mathbf {hat {k}} times Delta mathbf {r} _{i}right)cdot left(-Delta mathbf {r} _{i}times mathbf {hat {k}} right)\={}&-mathbf {hat {k}} cdot left(Delta mathbf {r} _{i}times Delta mathbf {r} _{i}times mathbf {hat {k}} right)\={}&-mathbf {hat {k}} cdot left[Delta mathbf {r} _{i}right]^{2}mathbf {hat {k}} .end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/62111ff66a6922e2705a7eb60478088077b7d9bf)
Thus, the moment of inertia around the line through in the direction is obtained from the calculation
![{displaystyle {begin{aligned}I_{L}&=sum _{i=1}^{N}m_{i}left|Delta mathbf {r} _{i}^{perp }right|^{2}\&=-sum _{i=1}^{N}m_{i}mathbf {hat {k}} cdot left[Delta mathbf {r} _{i}right]^{2}mathbf {hat {k}} =mathbf {hat {k}} cdot left(-sum _{i=1}^{N}m_{i}left[Delta mathbf {r} _{i}right]^{2}right)mathbf {hat {k}} \&=mathbf {hat {k}} cdot mathbf {I} _{mathbf {R} }mathbf {hat {k}} =mathbf {hat {k}} ^{mathsf {T}}mathbf {I} _{mathbf {R} }mathbf {hat {k}} ,end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/1f4a4a61db87467a4b76294e68bba221a2810cdf)
where is the moment of inertia matrix of the system relative to the reference point .
This shows that the inertia matrix can be used to calculate the moment of inertia of a body around any specified rotation axis in the body.
Inertia tensor[edit]
For the same object, different axes of rotation will have different moments of inertia about those axes. In general, the moments of inertia are not equal unless the object is symmetric about all axes. The moment of inertia tensor is a convenient way to summarize all moments of inertia of an object with one quantity. It may be calculated with respect to any point in space, although for practical purposes the center of mass is most commonly used.
Definition[edit]
For a rigid object of point masses  , the moment of inertia tensor is given by
, the moment of inertia tensor is given by

Its components are defined as

where
Note that, by the definition,  is a symmetric tensor.
is a symmetric tensor.
The diagonal elements are more succinctly written as

while the off-diagonal elements, also called the products of inertia, are

Here denotes the moment of inertia around the -axis when the objects are rotated around the x-axis,  denotes the moment of inertia around the -axis when the objects are rotated around the -axis, and so on.
denotes the moment of inertia around the -axis when the objects are rotated around the -axis, and so on.
These quantities can be generalized to an object with distributed mass, described by a mass density function, in a similar fashion to the scalar moment of inertia. One then has

where  is their outer product, E3 is the 3×3 identity matrix, and V is a region of space completely containing the object.
is their outer product, E3 is the 3×3 identity matrix, and V is a region of space completely containing the object.
Alternatively it can also be written in terms of the angular momentum operator ![{displaystyle [mathbf {r} ]mathbf {x} =mathbf {r} times mathbf {x} }](https://wikimedia.org/api/rest_v1/media/math/render/svg/0f32ba1c18fa5966e4dcd2275a7f7e3bc21f6dc0) :
:
![{displaystyle mathbf {I} =iiint _{V}rho (mathbf {r} )[mathbf {r} ]^{textsf {T}}[mathbf {r} ],dV=-iiint _{Q}rho (mathbf {r} )[mathbf {r} ]^{2},dV}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3f468dc8f2e4246bf78b1916390083f90998be5c)
The inertia tensor can be used in the same way as the inertia matrix to compute the scalar moment of inertia about an arbitrary axis in the direction  ,
,

where the dot product is taken with the corresponding elements in the component tensors. A product of inertia term such as  is obtained by the computation
is obtained by the computation

and can be interpreted as the moment of inertia around the -axis when the object rotates around the -axis.
The components of tensors of degree two can be assembled into a matrix. For the inertia tensor this matrix is given by,

It is common in rigid body mechanics to use notation that explicitly identifies the , , and -axes, such as and , for the components of the inertia tensor.
Alternate inertia convention[edit]
There are some CAD and CAE applications such as SolidWorks, Unigraphics NX/Siemens NX and MSC Adams that use an alternate convention for the products of inertia. According to this convention, the minus sign is removed from the product of inertia formulas and instead inserted in the inertia matrix:
![{displaystyle {begin{aligned}I_{xy}=I_{yx} &{stackrel {mathrm {def} }{=}} sum _{k=1}^{N}m_{k}x_{k}y_{k},\I_{xz}=I_{zx} &{stackrel {mathrm {def} }{=}} sum _{k=1}^{N}m_{k}x_{k}z_{k},\I_{yz}=I_{zy} &{stackrel {mathrm {def} }{=}} sum _{k=1}^{N}m_{k}y_{k}z_{k},\[3pt]mathbf {I} ={begin{bmatrix}I_{11}&I_{12}&I_{13}\I_{21}&I_{22}&I_{23}\I_{31}&I_{32}&I_{33}end{bmatrix}}&={begin{bmatrix}I_{xx}&-I_{xy}&-I_{xz}\-I_{yx}&I_{yy}&-I_{yz}\-I_{zx}&-I_{zy}&I_{zz}end{bmatrix}}={begin{bmatrix}sum _{k=1}^{N}m_{k}left(y_{k}^{2}+z_{k}^{2}right)&-sum _{k=1}^{N}m_{k}x_{k}y_{k}&-sum _{k=1}^{N}m_{k}x_{k}z_{k}\-sum _{k=1}^{N}m_{k}x_{k}y_{k}&sum _{k=1}^{N}m_{k}left(x_{k}^{2}+z_{k}^{2}right)&-sum _{k=1}^{N}m_{k}y_{k}z_{k}\-sum _{k=1}^{N}m_{k}x_{k}z_{k}&-sum _{k=1}^{N}m_{k}y_{k}z_{k}&sum _{k=1}^{N}m_{k}left(x_{k}^{2}+y_{k}^{2}right)end{bmatrix}}.end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8a01acaa1d453d5d3f4c7faf8a74da5b2637bb01)
Determine inertia convention (Principal axes method)[edit]
If one has the inertia data  without knowing which inertia convention that has been used, it can be determined if one also has the principal axes. With the principal axes method, one makes inertia matrices from the following two assumptions:
without knowing which inertia convention that has been used, it can be determined if one also has the principal axes. With the principal axes method, one makes inertia matrices from the following two assumptions:
- The standard inertia convention has been used .
- The alternate inertia convention has been used .


Next, one calculates the eigenvectors for the two matrices. The matrix whose eigenvectors are parallel to the principal axes corresponds to the inertia convention that has been used.
Derivation of the tensor components[edit]
The distance of a particle at  from the axis of rotation passing through the origin in the
from the axis of rotation passing through the origin in the  direction is
direction is  , where is unit vector. The moment of inertia on the axis is
, where is unit vector. The moment of inertia on the axis is

Rewrite the equation using matrix transpose:

where E3 is the 3×3 identity matrix.
This leads to a tensor formula for the moment of inertia

For multiple particles, we need only recall that the moment of inertia is additive in order to see that this formula is correct.
Inertia tensor of translation[edit]
Let  be the inertia tensor of a body calculated at its center of mass, and be the displacement vector of the body. The inertia tensor of the translated body respect to its original center of mass is given by:
be the inertia tensor of a body calculated at its center of mass, and be the displacement vector of the body. The inertia tensor of the translated body respect to its original center of mass is given by:
![{displaystyle mathbf {I} =mathbf {I} _{0}+m[(mathbf {R} cdot mathbf {R} )mathbf {E} _{3}-mathbf {R} otimes mathbf {R} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/22568fa28674e243955b8fdddced7496b8e6487d)
where is the body’s mass, E3 is the 3 × 3 identity matrix, and  is the outer product.
is the outer product.
Inertia tensor of rotation[edit]
Let be the matrix that represents a body’s rotation. The inertia tensor of the rotated body is given by:[27]

Inertia matrix in different reference frames[edit]
The use of the inertia matrix in Newton’s second law assumes its components are computed relative to axes parallel to the inertial frame and not relative to a body-fixed reference frame.[6][24] This means that as the body moves the components of the inertia matrix change with time. In contrast, the components of the inertia matrix measured in a body-fixed frame are constant.
Body frame[edit]
Let the body frame inertia matrix relative to the center of mass be denoted  , and define the orientation of the body frame relative to the inertial frame by the rotation matrix , such that,
, and define the orientation of the body frame relative to the inertial frame by the rotation matrix , such that,

where vectors  in the body fixed coordinate frame have coordinates in the inertial frame. Then, the inertia matrix of the body measured in the inertial frame is given by
in the body fixed coordinate frame have coordinates in the inertial frame. Then, the inertia matrix of the body measured in the inertial frame is given by

Notice that changes as the body moves, while remains constant.
Principal axes[edit]
Measured in the body frame, the inertia matrix is a constant real symmetric matrix. A real symmetric matrix has the eigendecomposition into the product of a rotation matrix  and a diagonal matrix
and a diagonal matrix  , given by
, given by

where

The columns of the rotation matrix define the directions of the principal axes of the body, and the constants  ,
,  , and
, and  are called the principal moments of inertia. This result was first shown by J. J. Sylvester (1852), and is a form of Sylvester’s law of inertia.[28][29] The principal axis with the highest moment of inertia is sometimes called the figure axis or axis of figure.
are called the principal moments of inertia. This result was first shown by J. J. Sylvester (1852), and is a form of Sylvester’s law of inertia.[28][29] The principal axis with the highest moment of inertia is sometimes called the figure axis or axis of figure.
A toy top is an example of a rotating rigid body, and the word top is used in names the types of types of rigid bodies. When all principal moments of inertia are distinct, the principal axes through center of mass are uniquely specified and the rigid body is called an asymmetric top. If two principal moments are the same, the rigid body is called a symmetric top and there is no unique choice for the two corresponding principal axes. If all three principal moments are the same, the rigid body is called a spherical top (although it need not be spherical) and any axis can be considered a principal axis, meaning that the moment of inertia is the same about any axis.
The principal axes are often aligned with the object’s symmetry axes. If a rigid body has an axis of symmetry of order , meaning it is symmetrical under rotations of 360°/m about the given axis, that axis is a principal axis. When  , the rigid body is a symmetric top. If a rigid body has at least two symmetry axes that are not parallel or perpendicular to each other, it is a spherical top, for example, a cube or any other Platonic solid.
, the rigid body is a symmetric top. If a rigid body has at least two symmetry axes that are not parallel or perpendicular to each other, it is a spherical top, for example, a cube or any other Platonic solid.
The motion of vehicles is often described in terms of yaw, pitch, and roll which usually correspond approximately to rotations about the three principal axes. If the vehicle has bilateral symmetry then one of the principal axes will correspond exactly to the transverse (pitch) axis.
A practical example of this mathematical phenomenon is the routine automotive task of balancing a tire, which basically means adjusting the distribution of mass of a car wheel such that its principal axis of inertia is aligned with the axle so the wheel does not wobble.
Rotating molecules are also classified as asymmetric, symmetric, or spherical tops, and the structure of their rotational spectra is different for each type.
Ellipsoid[edit]

An ellipsoid with the semi-principal diameters labelled  ,
,  , and
, and  .
.
The moment of inertia matrix in body-frame coordinates is a quadratic form that defines a surface in the body called Poinsot’s ellipsoid.[30] Let be the inertia matrix relative to the center of mass aligned with the principal axes, then the surface

or

defines an ellipsoid in the body frame. Write this equation in the form,

to see that the semi-principal diameters of this ellipsoid are given by

Let a point on this ellipsoid be defined in terms of its magnitude and direction,  , where is a unit vector. Then the relationship presented above, between the inertia matrix and the scalar moment of inertia
, where is a unit vector. Then the relationship presented above, between the inertia matrix and the scalar moment of inertia  around an axis in the direction , yields
around an axis in the direction , yields

Thus, the magnitude of a point in the direction on the inertia ellipsoid is

See also[edit]
- Central moment
- List of moments of inertia
- Planar lamina
- Rotational energy
- Moment of inertia factor
References[edit]
- ^ a b Mach, Ernst (1919). The Science of Mechanics. pp. 173–187. Retrieved November 21, 2014.
- ^ Euler, Leonhard (1765). Theoria motus corporum solidorum seu rigidorum: Ex primis nostrae cognitionis principiis stabilita et ad omnes motus, qui in huiusmodi corpora cadere possunt, accommodata [The theory of motion of solid or rigid bodies: established from first principles of our knowledge and appropriate for all motions which can occur in such bodies.] (in Latin). Rostock and Greifswald (Germany): A. F. Röse. p. 166. ISBN 978-1-4297-4281-8. From page 166: «Definitio 7. 422. Momentum inertiae corporis respectu eujuspiam axis est summa omnium productorum, quae oriuntur, si singula corporis elementa per quadrata distantiarum suarum ab axe multiplicentur.» (Definition 7. 422. A body’s moment of inertia with respect to any axis is the sum of all of the products, which arise, if the individual elements of the body are multiplied by the square of their distances from the axis.)
- ^ a b c d e f Marion, JB; Thornton, ST (1995). Classical dynamics of particles & systems (4th ed.). Thomson. ISBN 0-03-097302-3.
- ^ a b Symon, KR (1971). Mechanics (3rd ed.). Addison-Wesley. ISBN 0-201-07392-7.
- ^ a b Tenenbaum, RA (2004). Fundamentals of Applied Dynamics. Springer. ISBN 0-387-00887-X.
- ^ a b c d e f g h
Kane, T. R.; Levinson, D. A. (1985). Dynamics, Theory and Applications. New York: McGraw-Hill. - ^ a b Winn, Will (2010). Introduction to Understandable Physics: Volume I — Mechanics. AuthorHouse. p. 10.10. ISBN 978-1449063337.
- ^ a b Fullerton, Dan (2011). Honors Physics Essentials. Silly Beagle Productions. pp. 142–143. ISBN 978-0983563334.
- ^ Wolfram, Stephen (2014). «Spinning Ice Skater». Wolfram Demonstrations Project. Mathematica, Inc. Retrieved September 30, 2014.
- ^ Hokin, Samuel (2014). «Figure Skating Spins». The Physics of Everyday Stuff. Retrieved September 30, 2014.
- ^ Breithaupt, Jim (2000). New Understanding Physics for Advanced Level. Nelson Thomas. p. 64. ISBN 0748743146.
- ^ Crowell, Benjamin (2003). Conservation Laws. Light and Matter. pp. 107. ISBN 0970467028.
ice skater conservation of angular momentum.
- ^ Tipler, Paul A. (1999). Physics for Scientists and Engineers, Vol. 1: Mechanics, Oscillations and Waves, Thermodynamics. Macmillan. p. 304. ISBN 1572594918.
- ^ a b c d e
Paul, Burton (June 1979). Kinematics and Dynamics of Planar Machinery. Prentice Hall. ISBN 978-0135160626. - ^
Halliday, David; Resnick, Robert; Walker, Jearl (2005). Fundamentals of physics (7th ed.). Hoboken, NJ: Wiley. ISBN 9780471216438. - ^
French, A.P. (1971). Vibrations and waves. Boca Raton, FL: CRC Press. ISBN 9780748744473. - ^ a b c d e f
Uicker, John J.; Pennock, Gordon R.; Shigley, Joseph E. (2010). Theory of Machines and Mechanisms (4th ed.). Oxford University Press. ISBN 978-0195371239. - ^ C. Couch and J. Mayes, Trifilar Pendulum for MOI, Happresearch.com, 2016.
- ^ Gracey, William, The experimental determination of the moments of inertia of airplanes by a simplified compound-pendulum method, NACA Technical Note No. 1629, 1948
- ^ Morrow, H. W.; Kokernak, Robert (2011). Statics and Strengths of Materials (7 ed.). New Jersey: Prentice Hall. pp. 192–196. ISBN 978-0135034521.
- ^ In that situation this moment of inertia only describes how a torque applied along that axis causes a rotation about that axis. But, torques not aligned along a principal axis will also cause rotations about other axes.
- ^ a b c d e f g h i Ferdinand P. Beer; E. Russell Johnston; Jr., Phillip J. Cornwell (2010). Vector mechanics for engineers: Dynamics (9th ed.). Boston: McGraw-Hill. ISBN 978-0077295493.
- ^ Walter D. Pilkey, Analysis and Design of Elastic Beams: Computational Methods, John Wiley, 2002.
- ^ a b Goldstein, H. (1980). Classical Mechanics (2nd ed.). Addison-Wesley. ISBN 0-201-02918-9.
- ^ L. D. Landau and E. M. Lifshitz, Mechanics, Vol 1. 2nd Ed., Pergamon Press, 1969.
- ^ L. W. Tsai, Robot Analysis: The mechanics of serial and parallel manipulators, John-Wiley, NY, 1999.
- ^ David, Baraff. «Physically Based Modeling — Rigid Body Simulation» (PDF). Pixar Graphics Technologies.
- ^ Sylvester, J J (1852). «A demonstration of the theorem that every homogeneous quadratic polynomial is reducible by real orthogonal substitutions to the form of a sum of positive and negative squares» (PDF). Philosophical Magazine. 4th Series. 4 (23): 138–142. doi:10.1080/14786445208647087. Retrieved June 27, 2008.
- ^ Norman, C.W. (1986). Undergraduate algebra. Oxford University Press. pp. 360–361. ISBN 0-19-853248-2.
- ^ Mason, Matthew T. (2001). Mechanics of Robotics Manipulation. MIT Press. ISBN 978-0-262-13396-8. Retrieved November 21, 2014.
External links[edit]
- Angular momentum and rigid-body rotation in two and three dimensions
- Lecture notes on rigid-body rotation and moments of inertia
- The moment of inertia tensor
- An introductory lesson on moment of inertia: keeping a vertical pole not falling down (Java simulation)
- Tutorial on finding moments of inertia, with problems and solutions on various basic shapes
- Notes on mechanics of manipulation: the angular inertia tensor
- Easy to use and Free Moment of Inertia Calculator online
Содержание:
Геометрия масс:
Центр масс
При рассмотрении движения твердых тел и других механических систем важное значение имеет точка, называемая центром масс. Если механическая система состоит из конечного числа материальных точек 

где  — масса системы. Обозначая декартовы координаты материальных точек
— масса системы. Обозначая декартовы координаты материальных точек  , из (1) проецированием на декартовы оси координат получим следующие формулы для координат центра масс:
, из (1) проецированием на декартовы оси координат получим следующие формулы для координат центра масс:

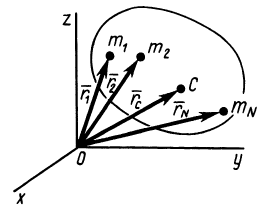
Рис. 21
Центр масс является не материальной точкой, а геометрической. Он может не совпадать ни с одной материальной точкой системы, как, например, в случае кольца. Центр масс системы характеризует распределение масс в системе.
Векторная величина  называется статическим моментом массы относительно точки
называется статическим моментом массы относительно точки  . Скалярная величина
. Скалярная величина  называется статическим моментом
называется статическим моментом
массы относительно координатной плоскости  . Величины
. Величины  и
и  являются соответственно статическими моментами массы относительно координатных плоскостей
являются соответственно статическими моментами массы относительно координатных плоскостей  и
и  .
.
Радиус-вектор и координаты центра масс через статические моменты массы выражаются формулами

Если механическая система представляет собой сплошное тело, то его разбивают на элементарные частицы с бесконечно малыми массами  и с изменяющимися от частицы к частице радиусом-вектором
и с изменяющимися от частицы к частице радиусом-вектором  .
.
Суммы в пределе переходят в интегралы. Формулы (1) и (Г) принимают форму

где  — масса тела.
— масса тела.
Для однородных сплошных тел  , где
, где  — плотность тела, общая для всех элементарных частиц;
— плотность тела, общая для всех элементарных частиц;  —объем элементарной частицы;
—объем элементарной частицы;  —объем тела.
—объем тела.
Для тел типа тонкого листа, которые можно принять за однородные материальные поверхности,  , где
, где  — поверхностная плотность;
— поверхностная плотность;  —площадь поверхности элементарной частицы;
—площадь поверхности элементарной частицы;  —площадь поверхности.
—площадь поверхности.
Для тонкой проволоки, которую можно принять за отрезок линии,  , где
, где  — линейная плотность;
— линейная плотность;  —длина элемента линии;
—длина элемента линии;  —длина отрезка линии.
—длина отрезка линии.
В этих случаях определение центра масс тел сводится к вычислению центра масс объемов, площадей и длин линий соответственно.
Моменты инерции
Для характеристики распределения масс в телах при рассмотрении вращательных движений требуется ввести понятия моментов инерции.
Моменты инерции относительно точки и оси
Моментом инерции механической системы, состоящей из  материальных точек, относительно точки
материальных точек, относительно точки  называется сумма произведений масс этих точек на квадраты их расстояний до точки
называется сумма произведений масс этих точек на квадраты их расстояний до точки  (рис. 22), т. е.
(рис. 22), т. е.

Момент инерции относительно точки часто называют полярным моментом инерции. В случае сплошного тела сумма переходит в интеграл и для полярного момента инерции имеем

где  — масса элементарной частицы тела, принимаемой в пределе за точку;
— масса элементарной частицы тела, принимаемой в пределе за точку;  —ее расстояние до точки .
—ее расстояние до точки .
Моментом инерции  системы материальных точек относительно оси
системы материальных точек относительно оси  называется сумма произведений масс этих точек на квадраты их расстояний
называется сумма произведений масс этих точек на квадраты их расстояний  до оси
до оси  (рис. 22), т. е.
(рис. 22), т. е.

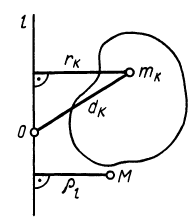
Рис. 22
В частном случае сплошного тела сумму следует заменить интегралом:

Моменты инерции одинаковых по форме однородных тел, изготовленных из разных материалов, отличаются друг от друга. Характеристикой, не зависящей от массы материала, является радиус инерции. Радиус инерции  относительно оси
относительно оси  определяется по формуле
определяется по формуле

где  —масса тела.
—масса тела.
Момент инерции относительно оси через радиус инерции относительно этой оси определяется выражением

В справочниках по моментам инерции приводят таблицы значений радиусов инерции различных тел.
Формула (5′) позволяет считать радиус инерции тела относительно оси расстоянием от этой оси до такой точки, в которой следует поместить массу тела, чтобы ее момент инерции оказался равным моменту инерции тела относительно рассматриваемой оси.
Моменты инерции относительно оси и точки имеют одинаковую размерность — произведение массы на квадрат длины  .
.
Кроме моментов инерции относительно точки и оси используются также моменты инерции относительно плоскостей и центробежные моменты инерции. Эти моменты инерции удобно рассмотреть относительно координатных плоскостей и осей декартовой системы координат.
Моменты инерции относительно осей координат
Моменты инерции относительно декартовых осей координат  ,
,  и
и  и их начала — точки
и их начала — точки  (рис. 23) — определяются выражениями
(рис. 23) — определяются выражениями

где  — координаты материальных точек системы. Для сплошных тел эти формулы примут вид
— координаты материальных точек системы. Для сплошных тел эти формулы примут вид

Из приведенных формул следует зависимость

Если через точку провести другую систему декартовых осей координат  , то для них по формуле (8) получим
, то для них по формуле (8) получим

Из сравнения (8) и (8′) следует, что

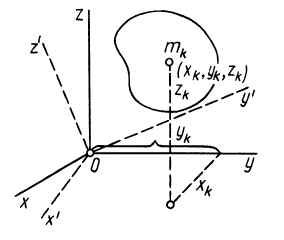
Рис. 23
Сумма моментов инерции относительно декартовых осей координат не зависит от ориентации этих осей в рассматриваемой точке, т. е. является величиной, инвариантной по отношению к направлению осей координат.
Для осей координат  можно определить следующие три центробежных момента инерции:
можно определить следующие три центробежных момента инерции:
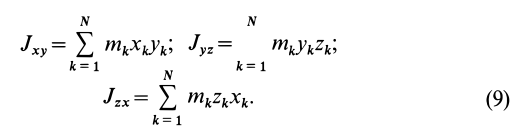
Центробежные моменты инерции часто называют произведениями инерции.
Моменты инерции относительно осей и точек — величины положительные, так как в них входят квадраты координат. Центробежные моменты инерции содержат произведения координат и могут быть как положительными, так и отрицательными.
Центробежные моменты инерции имеют важное значение при рассмотрении давлений на подшипники при вращении твердого тела вокруг неподвижной оси и в других случаях.
Кроме рассмотренных моментов инерции иногда используются моменты инерции относительно координатных плоскостей  , которые определяются выражениями
, которые определяются выражениями

Теорема о моментах инерции относительно параллельных осей (теорема Штейнера)
Установим зависимость между моментами инерции системы относительно параллельных осей, одна из которых проходит через центр масс. Пусть имеем две системы прямоугольных, взаимно параллельных осей координат  и
и  . Начало системы координат
. Начало системы координат  находится в» центре масс системы (рис. 24).
находится в» центре масс системы (рис. 24).
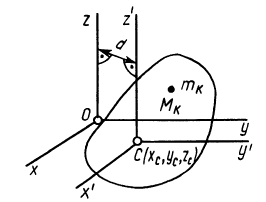
Рис. 24
По определению момента инерции относительно оси имеем
где  — масса точки
— масса точки  , а
, а  и
и  — координаты этой точки относительно систем координат и соответственно. Если обозначить
— координаты этой точки относительно систем координат и соответственно. Если обозначить  координаты центра масс относительно системы координат , то для взаимно параллельных осей координаты одной и той же точки связаны соотношениями параллельного переноса
координаты центра масс относительно системы координат , то для взаимно параллельных осей координаты одной и той же точки связаны соотношениями параллельного переноса

Подставим эти значения координат в выражение момента инерции  . После преобразований получим
. После преобразований получим

В этом соотношении  —масса системы,
—масса системы,  , так как
, так как  и
и  вследствие k = 1
вследствие k = 1
того, что по условию центр масс находится в начале координат этой системы координат.
Величина  , где
, где  —расстояние между осями
—расстояние между осями  и
и  . Окончательно
. Окончательно

Связь моментов инерции относительно двух параллельных осей, одна из которых проходит через центр масс, составляет содержание так называемой теоремы Штейнера или Гюйгенса— Штейнера: момент инерции системы относительно какой-либо оси равен моменту инерции относительно параллельной оси, проходящей через центр масс, плюс произведение массы системы на квадрат расстояния между этими осями.
Из теоремы Штейнера следует, что для совокупности параллельных осей момент инерции является наименьшим относительно оси, проходящей через центр масс.
Если взять ось  параллельной
параллельной  , то для нее получим
, то для нее получим
где  — расстояние между параллельными осями
— расстояние между параллельными осями  и
и  .
.
Исключая момент инерции  из двух последних формул, получим зависимость моментов инерции относительно двух параллельных осей, не проходящих через центр масс:
из двух последних формул, получим зависимость моментов инерции относительно двух параллельных осей, не проходящих через центр масс:

Установим изменение центробежных моментов инерции при параллельном переносе осей координат. Имеем

Учитывая, что  получаем
получаем

где  — координаты центра масс относительно системы координат
— координаты центра масс относительно системы координат  . Аналогичные формулы получаются для двух других центробежных моментов инерции:
. Аналогичные формулы получаются для двух других центробежных моментов инерции:

Так как начало системы координат находится в центре масс, то  ,
,  ,
,  и тогда
и тогда

т. е. центробежные моменты инерции при параллельном переносе осей координат из любой точки в центре масс изменяются в соответствии с (10).
Если производится параллельный перенос осей  из точки
из точки  в центр масс, то, согласно (10), имеем:
в центр масс, то, согласно (10), имеем:

Исключая из (10) и (10′) центробежные моменты инерции Л’з» Лу, получим формулы для изменения центробежных моментов инерции при параллельном переносе осей координат из точки  в точку
в точку  :
:

где  и
и  — координаты центра масс в двух системах взаимно параллельных осей координат.
— координаты центра масс в двух системах взаимно параллельных осей координат.
Моменты инерции простейших однородных тел
Моменты инерции тел сложной формы часто удается вычислить, если их предварительно разбить на тела простой формы. Моменты инерции сложных тел получают суммируя моменты инерции частей этих тел. Получим формулы для вычисления моментов инерции некоторых однородных простейших тел.
Однородный стержень
Имеем однородный стержень длиной  и массой
и массой  (рис. 25). Направим по стержню ось
(рис. 25). Направим по стержню ось  . Вычислим момент инерции стержня относительно оси
. Вычислим момент инерции стержня относительно оси  , проходящей перпендикулярно стержню через его конец. Согласно определению момента инерции сплошного тела относительно оси, имеем
, проходящей перпендикулярно стержню через его конец. Согласно определению момента инерции сплошного тела относительно оси, имеем
так как  , где
, где  —плотность стержня.
—плотность стержня.
Вычисляя интеграл, получаем
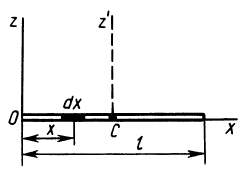
Рис. 25
Таким образом,

Момент инерции стержня относительно оси  , проходящей через центр масс и параллельной оси
, проходящей через центр масс и параллельной оси  , определяется по теореме Штейнера:
, определяется по теореме Штейнера:

Следовательно,

т. е.

Прямоугольная пластина
Прямоугольная тонкая пластина имеет размеры  и
и  и массу
и массу  (рис. 26). Оси
(рис. 26). Оси  и
и  расположим в плоскости пластины, а ось
расположим в плоскости пластины, а ось  —перпендикулярно ей. Для определения момента инерции пластины относительно оси
—перпендикулярно ей. Для определения момента инерции пластины относительно оси  разобьем пластину на элементарные полоски шириной
разобьем пластину на элементарные полоски шириной  и массой
и массой  и проинтегрируем по
и проинтегрируем по  от 0 до
от 0 до  . Получим
. Получим
так как  .
.
Аналогичные вычисления для оси  дадут
дадут
так как эта ось проходит через середину пластины. Для определения момента инерции пластины относительно оси  следует предварительно вычислить момент инерции отдельной заштрихованной полоски относительно параллельной оси
следует предварительно вычислить момент инерции отдельной заштрихованной полоски относительно параллельной оси  по формуле (12) для стержня и применить затем теорему Штейнера. Для элементарной полоски имеем
по формуле (12) для стержня и применить затем теорему Штейнера. Для элементарной полоски имеем
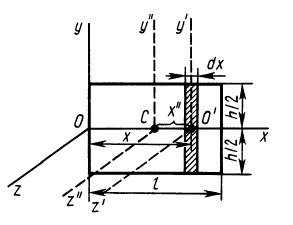
Рис. 26
Интегрируя это выражение в пределах от 0 до  , получим
, получим

Итак, для моментов инерции пластины относительно осей координат получены следующие формулы:

Круглый диск
Имеем тонкий однородный диск радиусом  и массой
и массой  (пис. 27). Вычислим момент его инерции
(пис. 27). Вычислим момент его инерции  относительно точки . Этот момент инерции для тонкого диска совпадает с моментом инерции
относительно точки . Этот момент инерции для тонкого диска совпадает с моментом инерции  относительно координатной оси
относительно координатной оси  , перпендикулярной плоскости диска. Разобьем диск на концентрические полоски шириной
, перпендикулярной плоскости диска. Разобьем диск на концентрические полоски шириной  , принимаемые в пределе за материальные окружности. Масса полоски равна ее площади
, принимаемые в пределе за материальные окружности. Масса полоски равна ее площади  , умноженной на плотность
, умноженной на плотность  , т.е.
, т.е.  . Момент одной полоски относительно точки равен
. Момент одной полоски относительно точки равен  . Для всего диска
. Для всего диска
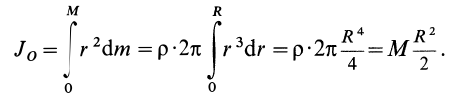
Таким образом,

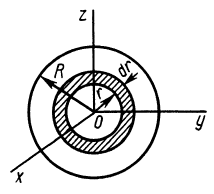
Рис. 27
Для осей координат  и
и  , расположенных в плоскости диска, в силу симметрии
, расположенных в плоскости диска, в силу симметрии  . Используя (8), имеем
. Используя (8), имеем  , но
, но  , поэтому
, поэтому

В случае тонкого проволочного кольца или круглого колеса, у которых масса распределена не по площади, а по его ободу, имеем

Круглый цилиндр
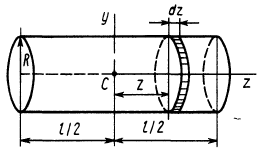
Рис. 28
Для круглого однородного цилиндра, масса которого  , радиус
, радиус  и длина
и длина  (рис. 28), вычислим прежде всего его момент инерции относительно продольной оси симметрии
(рис. 28), вычислим прежде всего его момент инерции относительно продольной оси симметрии  . Для этого разобьем цилиндр плоскостями, перпендикулярными оси , на тонкие диски массой
. Для этого разобьем цилиндр плоскостями, перпендикулярными оси , на тонкие диски массой  и толщиной
и толщиной  . Для такого диска момент инерции относительного оси
. Для такого диска момент инерции относительного оси  равен
равен  . Для всего цилиндра
. Для всего цилиндра
т.е.

Вычислим момент инерции цилиндра относительно его поперечной оси симметрии  . Для этого разобьем цилиндр поперечными сечениями, перпендикулярными его продольной оси, на элементарные диски толщиной
. Для этого разобьем цилиндр поперечными сечениями, перпендикулярными его продольной оси, на элементарные диски толщиной  . Момент инерции элементарного диска массой
. Момент инерции элементарного диска массой  относительно оси , по теореме Штейнера,
относительно оси , по теореме Штейнера,  .
.
Чтобы получить момент инерции всего цилиндра относительно оси , следует проинтегрировать полученное выражение по  в пределах от 0 до
в пределах от 0 до  и результат удвоить. Получим
и результат удвоить. Получим

Но  — масса цилиндра. Следовательно,
— масса цилиндра. Следовательно,

Таким образом, момент инерции цилиндра относительно его поперечной оси симметрии получается как сумма моментов инерции относительно этой оси диска и стержня, массы которых равны по отдельности массе цилиндра. Диск получается из цилиндра симметричным сжатием его с торцов до срединной плоскости при сохранении радиуса, а стержень — сжатием цилиндра в однородный стержень, расположенный по оси цилиндра, при сохранении длины.
Шар
Пусть масса шара  , радиус
, радиус  (рис. 29). Разобьем шар на концентрические сферические слои радиусом
(рис. 29). Разобьем шар на концентрические сферические слои радиусом  и толщиной
и толщиной  . Масса такого слоя
. Масса такого слоя  , где
, где  ;
;  —объем слоя, равный произведению площади поверхности сферы радиусом на толщину слоя , т.е.
—объем слоя, равный произведению площади поверхности сферы радиусом на толщину слоя , т.е.  . Таким образом, масса элементарного слоя
. Таким образом, масса элементарного слоя  . Для момента инерции шара относительно его центра
. Для момента инерции шара относительно его центра  имеем
имеем
т.е.

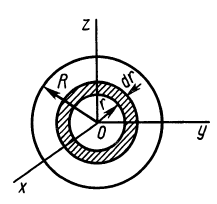
Рис. 29
Для осей координат, проходящих через центр шара, в силу симметрии  . Но
. Но  . Следовательно,
. Следовательно,

Моменты инерции относительно осей, проходящих через заданную точку
В заданной точке выберем декартову систему осей координат  . Ось
. Ось  образует с осями координат углы
образует с осями координат углы  (рис. 30). По определению момента инерции относительно оси имеем
(рис. 30). По определению момента инерции относительно оси имеем

или для сплошных тел
В дальнейшем используется определение (20). Сплошные тела считаются разбитыми на  малых частей, принимаемых за точки.
малых частей, принимаемых за точки.
Из прямоугольного треугольника  получаем
получаем

где  — координаты точки
— координаты точки  . Отрезок
. Отрезок  является проекцией радиуса-вектора
является проекцией радиуса-вектора  на ось
на ось  . Для получения проекции вектора
. Для получения проекции вектора  на ось
на ось  его следует умножить скалярно на единичный вектор этой оси
его следует умножить скалярно на единичный вектор этой оси  . Имеем
. Имеем

Умножая в (21)  , выраженный через координаты точки
, выраженный через координаты точки  , на единицу в виде
, на единицу в виде  и используя значение (22) для
и используя значение (22) для  , получим
, получим

Подставляя (23) в (20) и вынося косинусы углов за знаки сумм, имеем
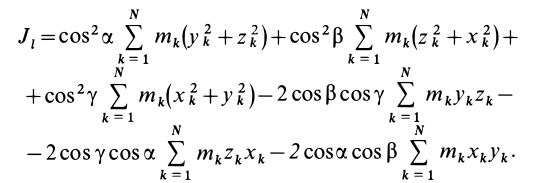
Учитывая, что

— моменты инерции относительно осей координат, а

— центробежные моменты инерции относительно тех же осей, получим

Для определения момента инерции  , кроме углов
, кроме углов  , определяющих направление оси, необходимо знать в точке
, определяющих направление оси, необходимо знать в точке  шесть моментов инерции:
шесть моментов инерции:  . Их удобно расположить как элементы единой таблицы или матрицы:
. Их удобно расположить как элементы единой таблицы или матрицы:

Матрица, или таблица (25), составленная из осевых и центробежных моментов инерции относительно декартовых осей координат, называется тензором инерции в точке . В тензоре инерции условились центробежные моменты инерции брать со знаком минус. Компоненты тензора инерции (отдельные осевые или центробежные моменты инерции) зависят не только от выбора точки, но и от ориентации осей координат в этой точке.
Для определения момента инерции относительно какой-либо оси, проходящей через заданную точку, для рассматриваемого тела необходимо иметь тензор инерции в этой точке и углы, определяющие направление оси с осями координат.
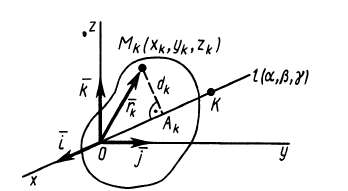
Рис. 30
Эллипсоид инерции
Для характеристики распределения моментов инерции тела относительно различных осей, проходящих через заданную точку, используется поверхность второго порядка — эллипсоид инерции. Для построения этой поверхности на каждой оси (см. рис. 31), проходящей через точку , откладывают от этой точки отрезок

Геометрическое место концов отрезков  расположится на поверхности, которая называется эллипсоидом инерции. Получим уравнение эллипсоида инерции. Для этого выразим косинусы углов
расположится на поверхности, которая называется эллипсоидом инерции. Получим уравнение эллипсоида инерции. Для этого выразим косинусы углов  через координаты
через координаты  точки
точки  . Имеем:
. Имеем:

Подставляя эти значения косинусов углов в (24) и сокращая на  , получим уравнение поверхности второго порядка:
, получим уравнение поверхности второго порядка:

Это действительно уравнение эллипсоида, так как отрезок  имеет конечную длину для всех осей, для которых моменты инерции не обращаются в нуль. Другие поверхности второго порядка, например гиперболоиды и параболоиды, имеют бесконечно удаленные точки. Эллипсоид инерции вырождается в цилиндр для тела в виде прямолинейного отрезка, если точка расположена на самом отрезке. Для оси, направленной по этой прямой линии, момент инерции обращается в нуль и соответственно отрезок равен бесконечности.
имеет конечную длину для всех осей, для которых моменты инерции не обращаются в нуль. Другие поверхности второго порядка, например гиперболоиды и параболоиды, имеют бесконечно удаленные точки. Эллипсоид инерции вырождается в цилиндр для тела в виде прямолинейного отрезка, если точка расположена на самом отрезке. Для оси, направленной по этой прямой линии, момент инерции обращается в нуль и соответственно отрезок равен бесконечности.
Для каждой точки имеется свой эллипсоид инерции. Эллипсоид инерции для центра масс тела называют центральным эллипсоидом инерции. Оси эллипсоида инерции (его сопряженные диаметры) называются главными осями инерции. В общем случае эллипсоид инерции имеет три взаимно перпендикулярные главные оси инерции. Они являются его осями симметрии.
В случае эллипсоида вращения все прямые, расположенные в экваториальной плоскости эллипсоида, перпендикулярной оси вращения, будут главными осями инерции. Для шара любая прямая, проходящая через его центр, есть главная ось инерции.
Моменты инерции относительно главных осей инерции называются главными моментами инерции, а относительно главных центральных осей инерции — главными центральными моментами инерции.
Если уравнение эллипсоида инерции отнести к его главным осям  , то оно примет вид
, то оно примет вид

где  —текущие координаты точки, расположенной на эллипсоиде инерции, относительно главных осей инерции;
—текущие координаты точки, расположенной на эллипсоиде инерции, относительно главных осей инерции; 
 — главные моменты инерции. Уравнение эллипсоида инерции (27′) не содержит слагаемых с произведениями координат точек. Поэтому центробежные моменты инерции относительно главных осей инерции равны нулю, т. е.
— главные моменты инерции. Уравнение эллипсоида инерции (27′) не содержит слагаемых с произведениями координат точек. Поэтому центробежные моменты инерции относительно главных осей инерции равны нулю, т. е.

Справедливо и обратное утверждение: если центробежные моменты инерции относительно трех взаимно перпендикулярных осей равны нулю, то эти оси являются главными осями инерции. Обращение в нуль трех центробежных моментов инерции является необходимым и достаточным условием того, что соответствующие прямоугольные оси координат есть главные оси инерции.
Главные моменты инерции часто обозначают  , вместо . Для главных осей инерции формула (24) принимает форму
, вместо . Для главных осей инерции формула (24) принимает форму

- Заказать решение задач по теоретической механике
Свойства главных осей инерции
Теорема 1. Если одна из декартовых осей координат, например  (рис. 31), является главной осью инерции для точки
(рис. 31), является главной осью инерции для точки  , а две другие оси
, а две другие оси  и
и  — любые, то два центробежных момента инерции, содержащих индекс главной оси инерции , обращаются в нуль, т.е.
— любые, то два центробежных момента инерции, содержащих индекс главной оси инерции , обращаются в нуль, т.е.  и
и  .
.
Главная ось инерции  является осью симметрии эллипсоида инерции. Поэтому каждой точке эллипсоида, например
является осью симметрии эллипсоида инерции. Поэтому каждой точке эллипсоида, например  , соответствует симметричная относительно этой оси точка
, соответствует симметричная относительно этой оси точка  . Подставляя в уравнение эллипсоида инерции (27) последовательно координаты этих точек, получим
. Подставляя в уравнение эллипсоида инерции (27) последовательно координаты этих точек, получим

Вычитая из первого уравнения второе, имеем
Так как всегда можно выбрать точки, для которых  и
и  отличны от нуля, то
отличны от нуля, то  .
.
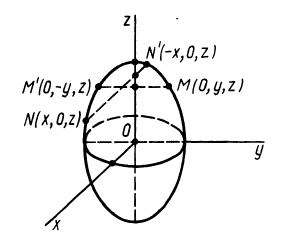
Рис. 31
Аналогичные рассуждения для двух симметричных относительно оси  точек
точек  и
и  приводят к заключению, что
приводят к заключению, что  . В аналитической геометрии при исследовании уравнений поверхностей второго порядка доказывается обратное утверждение, что если
. В аналитической геометрии при исследовании уравнений поверхностей второго порядка доказывается обратное утверждение, что если  и
и  , то ось есть главная ось. Таким образом, обращение в нуль центробежных моментов инерции
, то ось есть главная ось. Таким образом, обращение в нуль центробежных моментов инерции  и
и  является необходимым и достаточным условием, чтобы ось была главной осью инерции для точки .
является необходимым и достаточным условием, чтобы ось была главной осью инерции для точки .
Теорема 2. Если однородное тело имеет плоскость симметрии, то для любой точки, лежащей в этой плоскости, одна из главных осей инерции перпендикулярна плоскости симметрии, а две другие главные оси инерции расположены в этой плоскости.
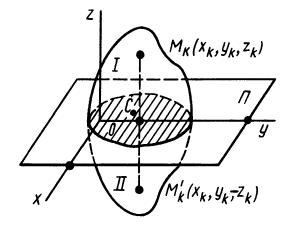
Рис. 32
Для доказательства теоремы выберем в плоскости симметрии  точку и в ней оси прямоугольной системы координат
точку и в ней оси прямоугольной системы координат  , причем ось направим перпендикулярно плоскости симметрии (рис. 32). Тогда каждой точке тела
, причем ось направим перпендикулярно плоскости симметрии (рис. 32). Тогда каждой точке тела  массой
массой  соответствует симметричная относительно плоскости точка
соответствует симметричная относительно плоскости точка  с такой же массой. Координаты точек
с такой же массой. Координаты точек  и
и  отличаются только знаком у координат
отличаются только знаком у координат  .
.
Для центробежного момента инерции  имеем
имеем

так как часть тела (I), соответствующая точкам с положительными координатами , одинакова с частью тела (II), у которой точки имеют такие же координаты , но со знаком минус. Аналогично доказывается, что
Так как центробежные моменты инерции и обращаются в нуль, то ось есть главная ось инерции для точки . Другие две главные оси инерции перпендикулярны оси и, следовательно, расположены в плоскости симметрии.
Центр масс однородного симметричного тела находится в плоскости симметрии. Поэтому одна из главных центральных осей инерции перпендикулярна плоскости симметрии, а две другие расположены в этой плоскости.
Доказанная теорема справедлива и для неоднородного тела, имеющего плоскость материальной симметрии.
Теорема 3. Если однородное тело имеет ось симметрии или неоднородное тело имеет ось материальной симметрии, то эта ось является главной центральной осью инерции.
Теорема доказывается аналогично предыдущей. Для каждой точки тела  с положительными координатами
с положительными координатами  и массой
и массой  существует симметричная относительно оси точка с такой же массой и такими же по величине, но отрицательными координатами
существует симметричная относительно оси точка с такой же массой и такими же по величине, но отрицательными координатами  , если осью симметрии является ось . Тогда
, если осью симметрии является ось . Тогда

так как суммы по симметричным относительно оси частям тела (I) и (II) отличаются друг от друга только знаком у координаты  .
.
Аналогично доказывается, что  .
.
Таким образом, ось является главной осью инерции для любой точки, расположенной на оси симметрии тела. Она есть главная центральная ось инерции, так как центр масс находится на оси симметрии.
Теорема 4. Главные оси инерции для точки , расположенной на главной центральной оси инерции, параллельны главным центральным осям инерции (рис. 33).
Выберем в точке главной центральной оси инерции  систему декартовых осей координат
систему декартовых осей координат  , взаимно параллельных главным центральным осям инерции
, взаимно параллельных главным центральным осям инерции  . Тогда координаты точки тела
. Тогда координаты точки тела  в двух системах осей координат будут связаны между собой формулами параллельного переноса осей
в двух системах осей координат будут связаны между собой формулами параллельного переноса осей

где  . Используя эти формулы, вычисляем центробежные моменты инерции
. Используя эти формулы, вычисляем центробежные моменты инерции  и
и  . Имеем
. Имеем

так как

где  —масса тела;
—масса тела;  — координата центра масс относительно системы координат . Аналогично получаем
— координата центра масс относительно системы координат . Аналогично получаем

Если  — центр масс системы, то
— центр масс системы, то  и
и  . Для главных центральных осей инерции центробежные моменты инерции равны нулю, т. е.
. Для главных центральных осей инерции центробежные моменты инерции равны нулю, т. е.

Используя полученные формулы при этих условиях, имеем:

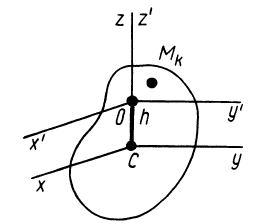
Рис. 33
Следовательно, оси  есть главные оси инерции для произвольной точки
есть главные оси инерции для произвольной точки  , расположенной на главной центральной оси инерции
, расположенной на главной центральной оси инерции  . Теорема доказана.
. Теорема доказана.
Из доказанной теоремы в качестве следствия получаем: главная центральная ось инерции является главной осью инерции для всех своих точек. Действительно, главная ось инерции  для точки
для точки  , лежащей на главной центральной оси инерции
, лежащей на главной центральной оси инерции  , совпадает с этой осью. Главная ось инерции таким свойством не обладает. Главные оси инерции для точки
, совпадает с этой осью. Главная ось инерции таким свойством не обладает. Главные оси инерции для точки  , расположенной на главной оси инерции точки
, расположенной на главной оси инерции точки  , не параллельны главным осям инерции для этой точки. Они в общем случае повернуты относительно этих осей.
, не параллельны главным осям инерции для этой точки. Они в общем случае повернуты относительно этих осей.
Определение главных моментов инерции и направления главных осей
Пусть известны компоненты тензора инерции в точке  относительно осей координат
относительно осей координат  . Для определения направления главных осей инерции в точке
. Для определения направления главных осей инерции в точке  используем уравнение эллипсоида инерции относительно этих осей
используем уравнение эллипсоида инерции относительно этих осей

Если оси координат  являются главными осями инерции, то радиус-вектор
являются главными осями инерции, то радиус-вектор  точки
точки  эллипсоида инерции, расположенной на главной оси инерции, например оси (рис. 34), направлен по нормали к эллипсоиду, т. е. параллельно вектору
эллипсоида инерции, расположенной на главной оси инерции, например оси (рис. 34), направлен по нормали к эллипсоиду, т. е. параллельно вектору  , который, согласно его определению, вычисляется по формуле
, который, согласно его определению, вычисляется по формуле
Параллельные векторы отличаются друг от друга скалярным множителем, который обозначим  . Тогда для параллельных векторов и и их проекций на оси координат имеем:
. Тогда для параллельных векторов и и их проекций на оси координат имеем:
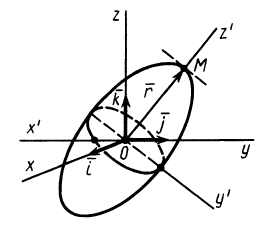
Рис. 34
В этих уравнениях  являются координатами точки конца вектора , проведенного из точки
являются координатами точки конца вектора , проведенного из точки  вдоль какой-либо главной оси инерции для этой точки.
вдоль какой-либо главной оси инерции для этой точки.
Для частных производных из (27′) получаем:
Подставляя их значения в (28′) и перенося все слагаемые в левую часть, после объединения и сокращения на общий множитель получим следующую систему уравнений для определения координат точки , находящейся на главной оси инерции:
Так как (29) является однородной системой линейных уравнений, то отличные от нуля решения для координат получаются только при условии, что определитель этой системы равен нулю, т. е.

Это кубическое уравнение для определения  называется уравнением собственных значений тензора инерции.
называется уравнением собственных значений тензора инерции.
В общем случае имеется три различных действительных корня кубического уравнения  , которые являются главными моментами инерции. Действительно, если ось
, которые являются главными моментами инерции. Действительно, если ось  совпадает с главной осью инерции, то для точки
совпадает с главной осью инерции, то для точки  эллипсоида инерции, расположенной на этой оси,
эллипсоида инерции, расположенной на этой оси,  и
и  . Первое уравнение (29) принимает вид
. Первое уравнение (29) принимает вид
Так как  , то
, то  и
и  , которое следует обозначить
, которое следует обозначить  . Аналогично можно получить
. Аналогично можно получить  , если оси
, если оси  и
и  — главные оси инерции.
— главные оси инерции.
Подставляя в (29)  получим только два независимых уравнения для определения координат точки
получим только два независимых уравнения для определения координат точки  эллипсоида инерции, соответствующих главной оси инерции, для которой главный момент инерции есть . Третье уравнение системы будет следствием двух других уравнений, так как определитель этой системы равен нулю. Из (29) можно найти только две величины, например
эллипсоида инерции, соответствующих главной оси инерции, для которой главный момент инерции есть . Третье уравнение системы будет следствием двух других уравнений, так как определитель этой системы равен нулю. Из (29) можно найти только две величины, например  и
и  . Они определят направление вектора вдоль главной оси инерции, момент инерции относительно которой есть . Модуль радиуса-вектора
. Они определят направление вектора вдоль главной оси инерции, момент инерции относительно которой есть . Модуль радиуса-вектора  остается неопределенным. Аналогично определяются направления векторов
остается неопределенным. Аналогично определяются направления векторов  и
и  вдоль двух других главных осей инерции, для которых главные моменты инерции равны
вдоль двух других главных осей инерции, для которых главные моменты инерции равны  и . Можно доказать, что векторы ,
и . Можно доказать, что векторы ,  ,
,  , направленные вдоль главных осей инерции, взаимно перпендикулярны.
, направленные вдоль главных осей инерции, взаимно перпендикулярны.
Таким образом, если известен тензор инерции для осей  , то можно определить как направление главных осей инерции, так и главные моменты инерции. Для главных осей инерции тензор инерции (25) принимает форму
, то можно определить как направление главных осей инерции, так и главные моменты инерции. Для главных осей инерции тензор инерции (25) принимает форму
Выражение компонентов тензора инерции через главные моменты инерции
Определим компоненты тензора инерции в точке  относительно осей координат , если в этой точке известны главные моменты инерции относительно главных осей инерции
относительно осей координат , если в этой точке известны главные моменты инерции относительно главных осей инерции  , т. е.
, т. е.  . Предположим, что ориентация осей координат относительно главных осей инерции задана таблицей углов:
. Предположим, что ориентация осей координат относительно главных осей инерции задана таблицей углов:
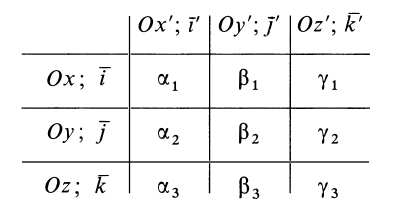
Осевые моменты инерции относительно осей  через главные моменты инерции определяются по формуле (24′). Принимая последовательно за ось
через главные моменты инерции определяются по формуле (24′). Принимая последовательно за ось  оси координат
оси координат  , получим
, получим
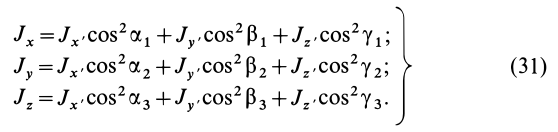
Для выражения центробежных моментов инерции через главные моменты инерции используем формулы преобразования координат точек тела при повороте осей координат вокруг точки  (рис. 35). Эти формулы получим проецированием на оси радиуса-вектора
(рис. 35). Эти формулы получим проецированием на оси радиуса-вектора  точки
точки  , разложенного предварительно на составляющие, параллельные осям двух систем осей координат в точке
, разложенного предварительно на составляющие, параллельные осям двух систем осей координат в точке  . Имеем
. Имеем

где  — координаты точки
— координаты точки  относительно системы осей координат
относительно системы осей координат  , а
, а  — относительно
— относительно  . Проецирование вектора на какую-либо ось прямоугольной системы координат эквивалентно скалярному умножению этого вектора на единичный вектор оси. Умножая обе части (32) последовательно на единичные векторы осей координат
. Проецирование вектора на какую-либо ось прямоугольной системы координат эквивалентно скалярному умножению этого вектора на единичный вектор оси. Умножая обе части (32) последовательно на единичные векторы осей координат  и учитывая таблицу углов для осей, получим
и учитывая таблицу углов для осей, получим
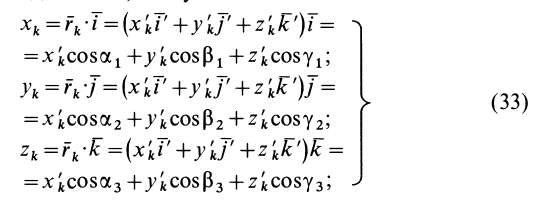
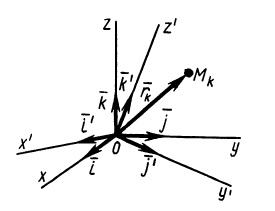
Рис. 35
Используя (33) для центробежного момента инерции  , имеем
, имеем
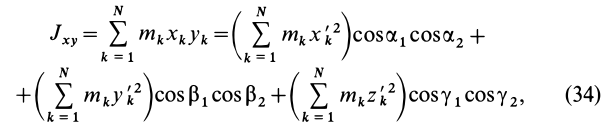
так как центробежные моменты инерции относительно главных осей инерции равны нулю, т. е.
Оси координат  и
и  взаимно перпендикулярны, поэтому косинусы их углов удовлетворяют условию
взаимно перпендикулярны, поэтому косинусы их углов удовлетворяют условию

или

Используя это соотношение для исключения величины  и добавляя в первом слагаемом (34) под знаком суммы
и добавляя в первом слагаемом (34) под знаком суммы  , а во втором
, а во втором  , после объединения слагаемых с одинаковыми произведениями косинусов получим
, после объединения слагаемых с одинаковыми произведениями косинусов получим
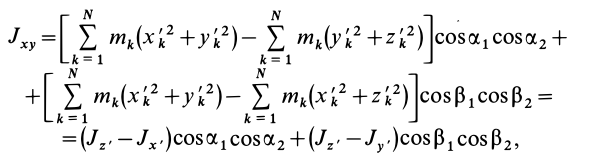
где 
— главные моменты инерции. Аналогично получаются выражения для  и
и  . Итак имеем
. Итак имеем

Формулы (31) и (35) дают выражения всех компонентов тензора инерции для осей координат  через главные моменты инерции, если известны углы этих осей с главными осями инерции. В приложениях встречаются частные случаи, когда одна из осей координат
через главные моменты инерции, если известны углы этих осей с главными осями инерции. В приложениях встречаются частные случаи, когда одна из осей координат  совпадает с главной осью инерции.
совпадает с главной осью инерции.
Если ось  совпадает с главной осью инерции
совпадает с главной осью инерции  (рис. 36), то
(рис. 36), то  . Это же можно получить из (35). Необходимые для вычисления углы соответственно равны:
. Это же можно получить из (35). Необходимые для вычисления углы соответственно равны:

Из (35) имеем

В формуле (35′) с полюсом следует брать главный момент инерции с индексом той оси, на положительное направление которой указывает дуговая стрелка поворота осей  на угол
на угол  до совпадения с осями
до совпадения с осями  . В рассматриваемом случае поворот осей
. В рассматриваемом случае поворот осей  вокруг
вокруг  до совпадения с главными осями производится от оси
до совпадения с главными осями производится от оси  к оси
к оси  ; следовательно, с плюсом следует взять главный момент инерции
; следовательно, с плюсом следует взять главный момент инерции  и с минусом —
и с минусом —  .
.
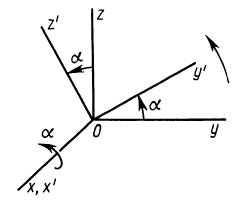
Рис. 36
Если оси расположены, как показано на рис. 37, то дуговая стрелка поворота осей  до совпадения с главными осями инерции
до совпадения с главными осями инерции  на угол направлена к отрицательному направлению оси
на угол направлена к отрицательному направлению оси  . Поэтому в (35′)
. Поэтому в (35′)  , следует взять со знаком минус, а
, следует взять со знаком минус, а  знаком плюс, в чем нетрудно убедиться, используя (35) и таблицу углов. Имеем:
знаком плюс, в чем нетрудно убедиться, используя (35) и таблицу углов. Имеем:
= 90°; р2 = а; Р3 = 90° + а;
Рис. 37
Аналогично при совпадении осей  с Оу’ и повороте осей Oxz вокруг
с Оу’ и повороте осей Oxz вокруг  до совпадения с осями
до совпадения с осями  на угол
на угол  от
от  к
к  в направлении против часовой стрелки имеем:
в направлении против часовой стрелки имеем:

При совпадении осей  и
и  и повороте осей вокруг на угол
и повороте осей вокруг на угол  от
от  к
к  против часовой стрелки получим:
против часовой стрелки получим:

- Свойства внутренних сил системы
- Дифференциальное уравнение движения системы
- Теоремы об изменении количества движения и о движении центра масс
- Теорема об изменении кинетического момента
- Прямолинейное движение точки
- Криволинейное движение материальной точки
- Движение несвободной материальной точки
- Относительное движение материальной точки