Л е к ц и я 9
Расчет на прочность
при действии ударной нагрузки
Понятие об ударной
нагрузке. Определение динамических
напряжений и перемещений при ударе.
Понятие об ударной
нагрузке
У
даром
называется взаимодействие неподвижной
конструкции с движущимся телом. Например,
ударное воздействие испытывает
конструкция, на которую с высоты h
падает груз весом Q
(рис. 9.1).
После удара
происходит торможение груза конструкцией
и через некоторый промежуток времени
скорость груза становится равной нулю.
В этот момент времени напряжения и
перемещения в конструкции имеют
максимальные значения и называются
динамическими. Затем происходят
затухающие колебания системы
«конструкция-груз» и устанавливается
состояние статического равновесия.
Напряжения и перемещения в конструкции
становятся равными тем значениям,
которые имеют место при статическом
приложении силы Q.
Основной задачей расчета на удар является
определение динамических напряжений
и перемещений.
Определение
динамических
напряжений и
перемещений при ударе
При определении
динамических напряжений и перемещений
используются следующие допущения
-
удар является
неупругим, т.е. груз не отскакивает от
конструкции, а перемещается вместе с
ней; -
в процессе удара
выполняется закон Гука; -
изменение
температуры системы «конструкция-груз»
является незначительным и им можно
пренебречь; -
вес конструкции
является малым и его можно не учитывать.
Для определения
динамических параметров конструкции
используем закон сохранения механической
энергии. Согласно этому закону в процессе
удара потенциальная энергия груза
преобразуется в потенциальную энергию
деформации конструкции
![]() (9.1)
(9.1)
Потенциальная
энергия груза равна работе, совершаемой
силой Q
до полной остановки груза
![]() (9.2)
(9.2)
где h
– высота падения груза; δд
– динамическое перемещение точки
приложения силы Q.
Потенциальную
энергию деформации конструкции найдем
как работу статически приложенной
динамической силы Qд
на динамическом перемещении δд
![]() (9.3)
(9.3)
Динамическая сила
Qд
равна сумме силы Q
и силы инерции, возникающей в результате
торможения груза конструкцией.
Из формул (9.1) –
(9.3) следует
![]() (9.4)
(9.4)
В области действия
закона Гука между силами и соответствующими
им перемещениями существует прямая
пропорциональность. Поэтому
![]() (9.5)
(9.5)
где k
– коэффициент пропорциональности.
Используя (9.4) и
(9.5), получаем уравнение для определения
динамического перемещения
![]() (9.6)
(9.6)
Решая (9.6), находим
![]() (9.10)
(9.10)
Так как динамическое
перемещение не может быть меньше
статического перемещения, то в соотношении
(9.10) оставляем знак плюс. Окончательно
будем иметь
![]() (9.11)
(9.11)
где
![]() (9.12)
(9.12)
– динамический
коэффициент.
В зоне действия
закона Гука между перемещениями и
напряжениями существует прямо
пропорциональная зависимость. Поэтому
![]() (9.13)
(9.13)
Таким образом,
согласно формулам (9.11) и (9.13) динамическое
напряжения (перемещение) при ударе равно
произведению напряжения (перемещения),
возникающего в конструкции при статическом
приложении силы Q,
на динамический коэффициент.
Рассмотрим частные
случаи.
-
Если h
>> δ,
то из (9.12) следует, что с достаточной
степенью точности динамический
коэффициент можно вычислять по
приближенной формуле
![]()
-
При мгновенном
приложении нагрузки (h
= 0) kд
= 2.
Из зависимости
(9.12) видно, что для уменьшения значений
динамических параметров нужно уменьшать
жесткость (увеличивать податливость)
конструкции. Этого можно достичь,
например, за счет использования в
конструкции пружин или рессор (рис.
9.2).

3
Соседние файлы в папке Лекции.Сопромат
- #
- #
- #
- #
- #
- #
Удар. Механические колебания
Явление удара возникает в том случае, когда скорость движения рассматриваемого тела или связанных с ним тел изменяется за очень короткий период времени, измеряемый иногда тысячными долями секунды. Благодаря такому резкому изменению скорости от ударяемого тела на ударяющее во время удара передаются весьма большие ускорения, направленные в сторону, обратную движению ударяющего тела, а значит, передаются и большие силы инерции, вызывающие значительные напряжения в обоих соударяющихся телах.
Исследования характера изменений инерционных сил в процессе удара весьма затруднительно, поэтому решение инженерных задач строится обычно на основе приближенной теории упругого удара, в которой применяются следующие основные допущения:
1) Кинематическая энергия ударяющего тела полностью переходит в потенциальную энергию деформации ударяемого тела; при этом пренебрегают энергией, идущей на деформацию ударяющего тела и основания, на котором находится ударяемое тело, а также на тепловые, магнитные и электрические явления.
2) Закон распределения напряжений и деформаций по объему ударяемого тела остается таким же, как и при статическом действии тел; при этом не учитывается изменение этого распределения в том месте, где происходит соударение тел, а также за счет колебаний высокой частоты, сопровождающих явление удара во всем объеме тела.
При выборе расчетных схем в условиях динамического нагружения вводится допущение о неизменности физико-механических характеристик Е, G, μ, σт и т.п., соответствующих статическим условиям нагружения.
Для движущейся системы можно в каждый момент времени рассматривать состояние равновесия любой ее части под действием внешних усилий и сил инерции.
В практических расчетах на удар широко используется энергетический метод, основанный на законе сохранения энергии.
Динамические напряжения, возникающие при ударе, вычисляются следующим образом:![]()
![]()
где σст и τст – нормальное и касательное напряжения в рассматриваемой точке при статическом нагружении системы, μ – динамический коэффициент (динамический коэффициент может обозначаться как μ или kд)..
Если задана высота падения ударяющего тела Н, динамический коэффициент определяется по формуле: , где
, где![]() это перемещение точки соударения в ударяемой системе при статическом действии веса ударяющего тела (может быть обозначено как ∆ст ).
это перемещение точки соударения в ударяемой системе при статическом действии веса ударяющего тела (может быть обозначено как ∆ст ).
Если известна скорость падения ударяющего тела в момент касания с ударяемым телом υ, для вычисления динамического коэффициента используется выражение:
![]()
где: g=9,81м/сек2 –ускорение свободного падения,
С учетом масс соударяемых тел расчет kд можно проводить по следующим формулам

здесь m– масса ударяющего тела; М=m+mк, где mк – приведенная масса ударяемой системы.
Для вычисления приведенной массы ударяемой системы часто применяется выражение  , где mi— масса i– го элемента системы, δkk – перемещение точки сосредоточения приведенной массы ударяемой системы при действии единичной силы, прикладываемой в этой же точке, δik – перемещение точки сосредоточения массы i– го элемента ударяемой системы при действии единичной силы, прикладываемой в точке сосредоточения приведенной массы системы.
, где mi— масса i– го элемента системы, δkk – перемещение точки сосредоточения приведенной массы ударяемой системы при действии единичной силы, прикладываемой в этой же точке, δik – перемещение точки сосредоточения массы i– го элемента ударяемой системы при действии единичной силы, прикладываемой в точке сосредоточения приведенной массы системы.
Механические колебания
Механические колебания представляют собой движения точек или частей деформируемой системы, обладающие той или иной степенью повторяемости.
В режиме свободных колебаний для систем с одной степенью свободы без учета сил сопротивления:
— круговая частота свободных (собственных) колебаний

где с – жесткость упругой системы, m – масса колеблющегося тела, ∆ст –перемещение колеблющегося тела при статическом его действии на упругую систему, Im – массовый момент инерции (применительно к крутильным колебаниям);
– период свободных колебаний
![]()
— секундная частота свободных колебаний
![]()
При наличии в колебательной системе сил сопротивления, пропорциональных скорости движения, круговая частота собственных колебаний определяется следующим образом
где n=α/2m – коэффициент затухания колебаний.
В режиме вынужденных колебаний при действии гармонической возмущающей силы ![]()
где F0 – амплитуда возмущающего усилия, р – круговая частота возмущающего усилия для системы с одной степенью свободы выражение для вычисления динамического коэффициента имеет вид
![]() , где ∆F0 – перемещение колеблющегося тела при статическом действии амплитуды возмущающей силы, ∆F – перемещение колеблющегося тела при статическом действии его веса, β – коэффициент нарастания колебаний, определяемый по формулам:
, где ∆F0 – перемещение колеблющегося тела при статическом действии амплитуды возмущающей силы, ∆F – перемещение колеблющегося тела при статическом действии его веса, β – коэффициент нарастания колебаний, определяемый по формулам:
-для систем при отсутствии сил сопротивления:
![]()
— для систем при наличии сил сопротивления:
![]()
Условия прочности при динамическом действии нагрузок записываются в виде:

Динамическая деформация динамические напряжения
Динамических деформаций
При решении ряда задач динамики механизм с одной степенью свободы можно заменить одной эквивалентной ему материальной точкой или вращающимся вокруг неподвижной оси телом. Хотя масса этой заменяющей точки и момент инерции этого заменяющего тела в общем случае и являются величинами переменными тем не менее такая замена позволяет получить динамические уравнения движения механизма в более простом и компактном виде и облегчает задачу составления указанных уравнений. Для осуществления такой замены вводим понятие приведенной массы и приведенного момента инерции механизма.
§ 5. Динамические уравнения Эйлера. 191
§ 5. ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА
§ 5. Динамические уравнения Эйлера
§ 5. ДИНАМИЧЕСКИЕ УРАВНЕНИЯ ЭЙЛЕРА 193
неизвестными: тремя неизвестными служат интересующие нас координаты—эйлеровы углы, а остальными тремя неизвестными — вспомогательные переменные р, q, r. В этом смысле подразделение уравнений Эйлера на кинематические соотношения (53) и динамические уравнения (60) условно и неточно. Обе эти группы уравнений совершенно равноценны, и лишь совместно они описывают движение тел с неподвижной точкой.
представляет собой формальный математический прием, удобный для решения задач динамики, так как позволяет динамические уравнения движения записывать в форме уравнений равновесия *). В случае криволинейного движения точки а = а^ — ап, и формула (11.10) может быть записана в виде
В настоящей главе разъясняются физическая природа возникновения и распространения возмущений, рассматриваются разнообразные методы измерения кинематических и динамических параметров. Приводятся динамические уравнения и определяющие соотношения, даются необходимые механические пояснения, важные для понимания сущности рассматриваемой проблемы. Приведена физико-математическая постановка динамической задачи и изложен общий эффективный метод ее решения. Достаточно детально обсуждены условия на фронте волны возмущений, выяснены области возмущений, инициированные волнами нагрузки и разгрузки, а также проанализировано отражение и взаимодействие волн напряжений ^при их распространении.
Результаты исследований позволяют объяснить эффект безызнос-ности на основе законов неравновесной термодинамики и теории образования структур при неравновесных процессах. Согласно термодинамике неравновесных процессов новые структуры могут появляться в природе в тех случаях, когда выполняются следующие четыре необходимых условия: 1) система является термодинамически открытой, т.е. может обмениваться веществом и (или) энергией со средой; 2) динамические уравнения системы нелинейны; 3) отклонение от равновесия превышает критическое значение; 4) микроскопические процессы происходят коопе-рированно (согласованно) [59, 71]. Названные условия могут быть реализованы в некоторых трибосистемах, которые при определенных условиях обладают свойствами открытых термодинамических систем, а микроскопические физико-химические процессы при трении происходят кооперирование и ведут к возникновению и самоорганизации структур, связанных с производством отрицательной энтропии и увеличением упорядоченности системы. Установлено, что свойства открытой термодинамической системы и самоорганизация структур присущи трибо-системам в условиях избирательного переноса при трении.
составляющими сил сопротивления на рабочем органе (канатном барабане) и определять прочность всех элементов системы, а также и мощность двигателя, исходя только из чисто статических предпосылок. Однако, по мере увеличения скоростей подъема, динамические составляющие возросли до таких величин, что пренебрежение ими уже не гарантировало достаточной надежности конструкции. Эти динамические составляющие на первых порах определяли приближенно и сводили к предположению, что запуск машины происходит равноускоренно в течение ограниченного времени (3—4 сек), которое само по себе принимали без достаточных обоснований. Следующий этап уточнения расчетов потребовал рассмотрения динамической системы машины, включая и приводной электродвигатель, как единого целого, где наряду с чисто механическими параметрами (вес груза, жесткость»канатов) учитывали и пусковые характеристики электропривода, что позволило составить общие динамические уравнения запуска машин, принимая пока ее механическую систему абсолютно жесткой. Следующим этапом явился отказ от последнего допущения и учет упругих деформаций, имеющих место как в жестких (валах, передачах), так и в гибких (канаты) элементах грузоподъемных машин. Это направление наиболее полно отражено в работах М. С. Комарова [35].v
и три уравнения движения тела относительно центра масс (динамические уравнения Эйлера)
Деформации ускоряемых тел часто называют динамическими деформациями, чтобы подчеркнуть их отличие от статических деформаций, возникновение которых не сопряжено с ускорениями деформированных тел. Различать динамические и статические деформации следует потому, что характер распределения этих двух типов деформаций в одном и том же теле обычно бывает различным. Это видно из того, что динамические деформации обычно бывают неоднородны, в то время как статические деформации во многих случаях оказываются однородными. Конечно, происхождение статических и динамических деформаций одно и то же. Как те, так и другие являются результатом того, что разные части тел в течение некоторого времени двигались по-разному. Но если взаимодействуют более чем два тела, то может случиться, что силы, возникшие в результате деформаций, в конце концов уравновесятся и ускорения тел прекратятся; вместе с тем прекратятся дальнейшие изменения деформаций. Эти неизменные деформации тела, покоящегося или движущегося без ускорений, и называют статическими деформациями.
Обычно, чтобы объяснить происхождение статических деформаций, ограничиваются только тем, что указывают силы, которыми «данная деформация вызвана». Однако это объяснение — неполное. Силы являются причиной движений, а деформации — результатом движений. Поэтому, не рассматривая движений, нельзя дать полной картины возникновения деформаций. Чтобы объяснить происхождение всякой деформации, нужно на основании законов движения объяснить, почему отдельные части деформированного тела в течение некоторого времени двигались по-разному. Правда, в случае статических деформаций связь между силами и движениями, о одной стороны, и между движениями и деформациями,—с другой, столь очевидна, что можно обойтись без детального рассмотрения и прямо связывать силы с деформациями. В случае же динамических деформаций эта связь далеко не так очевидна, и для объяснения их происхождения необходимо (как это было сделано в наших примерах) рассмотреть движения, в результате которых данная деформация возникла.
В ЦНИИТМАШе [166] разработано устройство для измерения динамических деформаций на базе стандартных стрелочных индикаторов часового типа с ценой деления от 0,01 до 0,002 мм.
Соотношение между статической жесткостью и модулем динамической жесткости существенно зависит от типа амортизатора и условий нагружения. Так, для колец и кубиков статическая жесткость мало отличается от динамической, полученной на частотах 0,001—0,01 Гц, а для углового амортизатора с относительно большой площадью закрепления резины динамическая жесткость превышает статическую в 1,4 раза. Коэффициент поглощения амортизатора изменяется в диапазоне 0,01—100 Гц от 0,1 до 0,3. На более высоких частотах поглощение энергии амортизатором повышается за счет неравномерности динамических деформаций по толщине резинового массива. Гистерезисные свойства амортизатора можно учитывать введением комплексной жесткости (начиная с частотного диапазона 10
а Гц). При этом модуль жесткости и коэффициент поглощения должны определяться по установившимся кривым деформирования после 15—20 циклов нагружения.
Для измерения динамических деформаций, а следовательно, и напряжений на деталях сопряжения с двух сторон под углом 45° к оси устанавливают датчики из константановой проволоки диаметром 0,02 мм, базой 10 мм и сопротивлением 120 Ом. Изменение напряжений регистрируется восьмишлейфовым осциллографом 10 и электронным измерителем деформации 14 типа ИД-2, приспособленным для исследования динамических процессов и работающим на принципе несущей частоты.
Вторая комплексная тема, разрабатываемая с 1963 года яа кафедре, «Влияние жесткости технологической системы на точность при протягивании», является продолжением ранее выполненных Л. Р. Апиным работ в области внутреннего протягивания [31, 32]. Работы ведутся по трем основным направлениям: а) влияние механических свойств и структуры сталей на •точность; б) -исследование динамических процессов при протягивании; в) исследование рассеивания при протягивании. Некоторые результаты исследований изложены в статьях (см. стр. 49 и 57). Наиболее существенным результатом является создание оригинальной динамометрической аппаратуры для записи динамических деформаций детали в процессе резания, а также выявления ряда закономерностей протекания тепловых процессов.
Большая точность струнных тензометров и многообразие схем обработки частотно-модулированных сигналов позволяют использовать эти тензометры для измерения как статических, так и динамических деформаций.
выпускаемым или широко используемым приборам, предназначенным для измерения статических, медленно изменяющихся, и динамических деформаций.
Измерения динамических деформаций и перемещений с частотами до 10 Гц, имеющих статическую составляющую, могут быть выполнены с помощью тензометра с упругим элементом в форме рамы (рис. 49). Тензометр устанавливают между двумя конусными опорами, заделанными в поверхность объекта исследования.
Блок-схема испытательного стенда приведена на рис. 2. Сигналы, поступающие от датчиков измерения нормального усилия (Дк) и крутящего момента (Дмкр), усиливаются усилителем динамических деформаций с коэффициентами 1.25ХЮ3 и 5,ОХЮ3 относительных единиц соответственно и регистрируются осциллографом. Для записи сигналов используются гальванометры с чувствительностью 0,04 и 2,5 мм/а соответственно. Максимальный коэффициент нелинейности измерительной цепи при расчете по [1] составляет
2,8%. Кинематические параметры ключа при экспериментировании регистрировались кинокамерой (32 кадра в сек.)-
Использование датчиков [8, 14, 25, 29]. Проволочные датчики применяются для измерения и регистрации статических и динамических деформаций, а также для большого числа других измерений: давлений, нагрузок, вибраций, скоростей, ускорений, температур, влажности и пр.
Источник
Лекция 15 (продолжение). Примеры решения на динамические нагрузки
Расчеты при ударных нагрузках
Пример 1.
Груз весом Р = 2 кН, скользя без трения вдоль стального бруса, падает на приваренную к нему жесткую пластину и вызывает ударное растяжение бруса. Площадь поперечного сечения бруса А = 0,0005 м 2 (рис. а ), его длина l = 1,8 м, модуль продольной упругости материала бруса Е =2·10 5 МПа; высота падения груза Н равна 0,02 м.
Требуется определить максимальное нормальное напряжение в брусе в момент его наибольшей деформации. Собственной массой стального бруса, испытывающего удар, пренебречь.



Определим величину  (рис. б)
(рис. б)

Рассчитываем динамический коэффициент, используя формулу 

Определяем статическое нормальное напряжение

Находим максимальное динамическое напряжение
 .
.
Груз весом Р = 200 Н падает с высоты Н = 0,3 м посередине на шарнирно опертую двухопорную деревянную балку квадратного поперечного сечения со стороной а = 15 см и длиной l = 3 м. Рассчитать запас прочности балки, если модуль продольной упругости материала балки Е = 10 4 МПа, а предел прочности при расчете на изгиб R И = 20 МПа. Собственной массой балки, испытывающей удар, пренебречь.
Проводим статический расчет, т.е. определяем максимальное напряжение и перемещение в серединном сечении балки при нагружении ее статической сосредоточенной силой Р = 200 Н.
Максимальный изгибающий момент равен

Статический момент площади сечения равен

Определяем максимальное нормальное статическое напряжение

Статическое перемещение посередине балки определяем по известной из теории изгиба формуле

Рассчитываем динамический коэффициент

Находим динамическое напряжение
 МПа.
МПа.
Для заданной упругой системы определить:
— максимальные напряжения, возникающие при ударе об нее груза  , падающего с высоты
, падающего с высоты  ;
;
— величину перемещения в направлении удара в том сечении, в котором прикладывается ударная нагрузка в направлении удара.
Материал упругой системы: Сталь (  ). Массой упругой системы пренебречь. Рычаг в заданиях на скручивающий удар считать абсолютно жестким.
). Массой упругой системы пренебречь. Рычаг в заданиях на скручивающий удар считать абсолютно жестким.
Рассмотрим различные примеры ударного нагружения.
Осевое действие ударной нагрузки.

Пусть на ступенчатый стержень квадратного поперечного сечения с высоты падает груз .
Стороны квадратного сечения :  ;
;  .
.
Длины участков 
Динамические напряжения в стальном стержне определяются по формуле
 ,
,
где  — напряжение, возникающее в материале стержня при воздействии на стержень статически приложенной нагрузки
— напряжение, возникающее в материале стержня при воздействии на стержень статически приложенной нагрузки  в месте удара.
в месте удара.
 — коэффициент динамичности.
— коэффициент динамичности.
При статическом приложении нагрузки в месте удара в любом сечении стержня будет возникать продольная сила
 .
.
При этом максимальное напряжение будет в сечениях с меньшей площадью поперечного сечения, т. е. в любом сечении участка с длиной  , для которого сторона квадратного сечения равна
, для которого сторона квадратного сечения равна  .
.

Знак минус указывает на сжимающее нормальное напряжение.
Коэффициент динамичности зависит от высоты падения груза и статической деформации 
Статическая деформация будет складываться из деформаций участков
Максимальное динамическое напряжение

Динамическая деформация сечения, в котором прикладывается ударная нагрузка


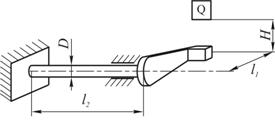
Пусть стержень, длиной  и диаметром , испытывает скручивающий удар от нагрузки , падающей с высоты на абсолютно жесткий рычаг длиной
и диаметром , испытывает скручивающий удар от нагрузки , падающей с высоты на абсолютно жесткий рычаг длиной  . Определим максимальное напряжение и величину перемещения сечения в месте приложения ударной нагрузки.
. Определим максимальное напряжение и величину перемещения сечения в месте приложения ударной нагрузки.
Предварительно определим статические значения напряжения и перемещения.
Пренебрегая деформацией рычага и полагая, что вследствие малости перемещения проекция на вертикаль перемещения точки соударения равна длине дуги с радиусом  , можно вычислить по формуле
, можно вычислить по формуле
 ,
,
где  — модуль сдвига
— модуль сдвига  . Принимаем
. Принимаем  ;
;
 — полярный момент инерции. Для круглого поперечного сечения
— полярный момент инерции. Для круглого поперечного сечения


Коэффициент динамичности

Максимальное статическое напряжение при действии закручивающего момента 
 .
.
 — полярный момент сопротивления. Для круглого поперечного сечения
— полярный момент сопротивления. Для круглого поперечного сечения





Пусть на свободный конец консольной балки длиной прямоугольного поперечного сечения с шириной сечения  и высотой сечения
и высотой сечения  падает груз с высоты .
падает груз с высоты .
Определим максимальное напряжение и величину перемещения сечения в месте приложения ударной нагрузки.
Статическое перемещение определим способом Верещагина


Максимальное статическое напряжение будет возникать в опорном сечении



Стальной стержень диаметром d = 20 мм и длиной l = 1 м растягивается падающим с высоты Н = 200 мм грузом массой m = 12,5 кг (см. рис.). Определить динамические напряжение и деформацию. Как изменятся их значения при замене материала стержня на дюралюмин, модуль упругости которого  МПа ?
МПа ?
Динамическое напряжение  , где статическое напряжение
, где статическое напряжение
 .
.
Вес груза  ,
,
Статическое напряжение  .
.
Коэффициент динамичности  (без учета собственной массы стержня), где статическая деформация
(без учета собственной массы стержня), где статическая деформация
 .
.
Коэффициент динамичности 
Для жесткого стержня единицами в формуле  можно было бы пренебречь.
можно было бы пренебречь.
Динамическое напряжение  .
.
Для дюралюминиевого стержня
 ,
,
 .
.
Таким образом, замена материала позволяет снизить напряжения в 1,69 раза.
Для данной схемы определить максимальные ударные напряжения и максимальный прогиб, если масса падающего груза m = 50 кг, высота падения h = 40 мм, сечение балки – двутавр № 14: WX = 81,7 см 3 , IX = = 572 см 4 , материал балки – сталь.
Определяем опорные реакции
 ;
; 

 ;
; 
 ;
; 
 — верно
— верно
Определяем статический прогиб балки
Прогиб балки определим по методу начальных параметров.
Составляем уравнение прогибов для точки С

Определяем начальные параметры
 . Для нахождения
. Для нахождения  составим уравнение прогибов для точки В , приравняв его к нулю, найдем искомую величину.
составим уравнение прогибов для точки В , приравняв его к нулю, найдем искомую величину.




Определяем ударный коэффициент

Определяем напряжения в балке от статического действия нагрузки
Изгибающий момент будет иметь максимальное значение в точке С (см. рис.), а его величина определится по формуле:

Тогда напряжения в точке С:
Определяем динамический прогиб и напряжения


Найти наибольшее нормальное напряжение в шарнирно опертой двутавровой балке, возникающее при падении на нее груза весом  кН с высоты
кН с высоты  см (см. рис.). Оценить прочность балки при
см (см. рис.). Оценить прочность балки при  кН/см 2 . Номер двутавра – 20,
кН/см 2 . Номер двутавра – 20,  м,
м,  .
.
Наибольшее нормальное напряжение  , возникающее в балке при ударе, определяется по формуле
, возникающее в балке при ударе, определяется по формуле
 ,
,
где  – коэффициент динамичности при ударе;
– коэффициент динамичности при ударе;  – наибольшее нормальное напряжение, которое возникло бы в балке при статическом приложении нагрузки, равной G .
– наибольшее нормальное напряжение, которое возникло бы в балке при статическом приложении нагрузки, равной G .
Коэффициент динамичности при ударе вычисляется по формуле
 ,
,
где  – статический прогиб балки в месте падения груза весом G , вызванный его статическим приложением.
– статический прогиб балки в месте падения груза весом G , вызванный его статическим приложением.
1. Строим эпюру изгибающих моментов  от силы кН, приложенной к балке статически.
от силы кН, приложенной к балке статически.
Сначала определяем опорную реакцию  . Направим ее вверх и составим уравнение статики
. Направим ее вверх и составим уравнение статики  . Получим:
. Получим:
 .
.
 .
.
Тогда изгибающий момент под сосредоточенной силой равен:
 кНм .
кНм .
2. В месте падения груза весом G прикладываем к балке единичную силу  и строим от нее единичную эпюру изгибающих моментов
и строим от нее единичную эпюру изгибающих моментов  .
.
В этом случае  и тогда ордината единичной эпюры моментов под силой равна
и тогда ордината единичной эпюры моментов под силой равна
 м.
м.
3. Определяем статический прогиб балки  в месте падения груза весом G , перемножая полученные эпюры по правилу трапеций :
в месте падения груза весом G , перемножая полученные эпюры по правилу трапеций :
 .
.
Для двутавра № 20 осевой момент инерции  см 4 . Модуль Юнга
см 4 . Модуль Юнга  кН/см 2 . Тогда статический прогиб:
кН/см 2 . Тогда статический прогиб:
 см .
см .
4. Коэффициент динамичности равен :
 .
.
5. Вычисляем наибольшее статическое напряжение, возникающее в поперечном сечении балки (  кНм = 63 кНсм ;
кНм = 63 кНсм ;  см 3 ):
см 3 ):
 кН/см 2 .
кН/см 2 .
6. Вычисляем наибольшее динамическое напряжение в балке:
 кН/см 2 .
кН/см 2 .
Прочность балки при ударе обеспечена, поскольку
 кН/см 2 кН/см 2 .
кН/см 2 кН/см 2 .
Груз G = 1,2 кН падает с высоты h = 0,12 м в точку С двутавровой балки КD, опирающейся на упругое сооружение, состоящее из двух балок АК и DМ (рис. 1, а). Сечение балки КD — двутавр №18 (  м 4 ;
м 4 ;  м 3 ). Сечение балок АК и DМ — двутавр №30 (
м 3 ). Сечение балок АК и DМ — двутавр №30 (  м 4 ;
м 4 ;  м 3 ). Длина балок l = 1,2 м. Модуль упругости
м 3 ). Длина балок l = 1,2 м. Модуль упругости  кН/м 2 .
кН/м 2 .
Определить динамические напряжения в опасных сечениях балок. Сравнить полученные напряжения с теми, которые появятся в балках, если балка КD будет опираться на абсолютно жесткое основание.
Из уравнений равновесия балки  и
и  находим опорные реакции RK , RD :
находим опорные реакции RK , RD :
 кН;
кН;
 кН.
кН.
Для проверки правильности найденных опорных реакций составляем уравнение равновесия  : 0,8 + 0,4 — 1,2 = 0; 0=0.
: 0,8 + 0,4 — 1,2 = 0; 0=0.
Затем строим эпюры изгибающих моментов и поперечных сил для рассматриваемой балки КD и двух консольных балок АК и DМ (рис. 1, б, в, г, д, е).
1. Определение полного статического прогиба сечения С балки КD .
Сначала определим статический прогиб сечения С балки КD при опирании ее на абсолютно жесткое основание. Составим уравнение прогиба методом начальных параметров, приняв начало координат в сечении К:
 . (1)
. (1)
При этом ,  ;
;  ;
;  ;
;  . Для нахождения
. Для нахождения  используем условие отсутствия прогиба в сечении D:
используем условие отсутствия прогиба в сечении D:  . При z = l м имеем:
. При z = l м имеем:
 ;
;  .
.
Теперь, подставив найденное значение в уравнение (1), получим формулу для определения прогиба сечения С :
 м.
м.
Для определения полного прогиба сечения С с учетом упругого характера опирания балки КD (рис. 1, ж) необходимо предварительно найти прогибы концов консольных балок АК и DМ. Для этого воспользуемся формулой, полученной в примере 34:
 м ;
м ;
 м.
м.
Эпюра перемещений для составной конструкции из балок изображена на рис. 1, ж. Величину полного перемещения сечения С балки с учетом перемещения его в результате смещения опор балки КD, опирающейся на консольные балки, определяем по формуле:

 .
.
2. Определение динамических коэффициентов и напряжений .
Динамический коэффициент при падении груза G на балку КD, опирающуюся на консольные балки АК и DМ, определяем по формуле:

а при опирании балки КD на абсолютно жесткое основание —
 .
.
Для вычисления динамических напряжений необходимо вначале определить статические напряжения, возникающие в сечении С:
 кН/м 2 ,
кН/м 2 ,
а затем динамические напряжения:
 .
.
Динамические напряжения, возникающие в сечении С балки КD, опирающейся на консольные балки,
 кН/м 2 ,
кН/м 2 ,
и динамические напряжения, возникающие в сечении С балки КD, опирающейся на абсолютно жесткое основание:
 кН/м 2 .
кН/м 2 .
Таким образом, если опоры лежат на абсолютно жестком основание, то в сечении С возникают динамические напряжения в  раза большие по величине. Статические напряжения, возникающие в сечении А:
раза большие по величине. Статические напряжения, возникающие в сечении А:
 кН/м 2 .
кН/м 2 .
При динамическом коэффициенте КД = 78,1, полученном в предположении упругого опирания балки КD в точках К и D, находим динамические напряжения в сечении А:
 кН/м 2 .
кН/м 2 .
Статическое и динамическое напряжения в сечении М балки DМ:
 кН/м 2 .
кН/м 2 .
 кН/м 2 .
кН/м 2 .
Следовательно, вне зависимости от того, на какое основание опирается балка KD, опасное сечение находится в точке удара.
На раму, показанную на рис. 1, падает груз Q с высоты  . Вес груза
. Вес груза  , поперечное сечение рамы – двутавр № 20. Требуется найти максимальные нормальные напряжения в опасном сечении рамы и прогиб в точке удара от ударного действия нагрузки.
, поперечное сечение рамы – двутавр № 20. Требуется найти максимальные нормальные напряжения в опасном сечении рамы и прогиб в точке удара от ударного действия нагрузки.
Чтобы определить динамический коэффициент по формуле  , необходимо найти прогиб
, необходимо найти прогиб  точки С (точки приложения нагрузки Q ) от статического действия нагрузки. Найдем этот прогиб, используя метод Максвелла–Мора и интегрируя формулу Максвелла–Мора с помощью правила Верещагина. Для этого построим эпюры изгибающих моментов от нагрузки Q (рис. 2, а) и от единичной силы, соответствующей искомому перемещению (рис. 2, б). Перемножим эти эпюры по правилу Верещагина:
точки С (точки приложения нагрузки Q ) от статического действия нагрузки. Найдем этот прогиб, используя метод Максвелла–Мора и интегрируя формулу Максвелла–Мора с помощью правила Верещагина. Для этого построим эпюры изгибающих моментов от нагрузки Q (рис. 2, а) и от единичной силы, соответствующей искомому перемещению (рис. 2, б). Перемножим эти эпюры по правилу Верещагина:

 .
.
Подставляя величину жесткости для двутавра № 20, сосчитаем прогиб в «см»
 .
.
Найдем динамический коэффициент по формуле
 .
.
Определим максимальные нормальные напряжения в опасном сечении от статического действия нагрузки. В рассматриваемом примере несколько равно опасных сечений с изгибающим моментом  . Максимальные статические напряжения равны
. Максимальные статические напряжения равны
 .
.
Динамические напряжения от действия ударной нагрузки увеличатся согласно формуле  в раз.
в раз.
 .
.
Видно, что динамические напряжения не превосходят предела пропорциональности  = 200 МПа, и материал работает упруго.
= 200 МПа, и материал работает упруго.
Во столько же раз увеличится и динамический прогиб:
 .
.
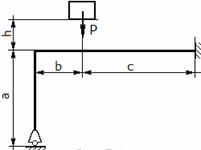
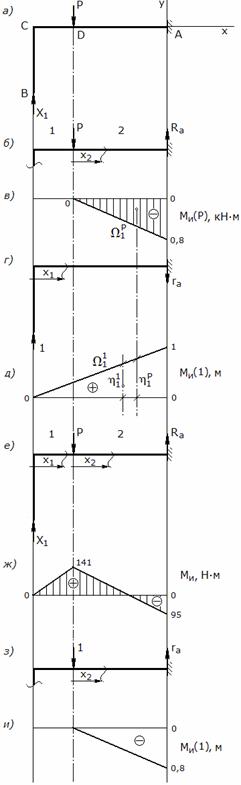
Дано: на раму падает груз весом P с некоторой высоты h (рис.1)
материал – сталь,  = 160 МПа,
= 160 МПа,  МПа;
МПа;
a = 0,6 м, b = 0,2 м, c = 0,8 м; d = 11 см, P = 1 кН, h = 14 см;
1) раскрыть статическую неопределимость рамы;
2) определить динамический коэффициент;
3) определить динамические напряжения и прогибы;
1. Раскрытие статической неопредимости рамы
Выбираем эквивалентную систему, отбрасывая реакцию катка и заменяя ее неизвестной силой X 1 (рис. 2, а).
а) построение грузовой эпюры
Определяем реакцию заделки A , проецируя все внешние силы на ось y (рис. 2, б):

Изгибающий момент от статической силы P на 2 участке будет:

в сечении D момент равен 0, в сечении A :

Строим эпюру моментов от силы P (рис. 2, в).
б) построение эпюры моментов от единичной силы
Вместо неизвестной X 1 прикладываем единичную силу  и рассматриваем ее действие на раму (рис. 2, г). Реакция заделки в этом случае равна:
и рассматриваем ее действие на раму (рис. 2, г). Реакция заделки в этом случае равна:
Изгибающий момент от единичной силы равен:

в сечении C момент равен 0, в сечении A :

Строим эпюру моментов от единичной силы (рис.2, д).
в) решение канонического уравнения
В сечении B приложения неизвестной реакции прогиб равен 0 (т.к. катковая опора препятствует вертикальному перемещению), поэтому и в сечении C прогиб равен 0, т.е. суммарный прогиб от действия неизвестной реакции X 1 и силы P равен 0:

где  ,
,  – прогибы от действия единичной силы и силы P .
– прогибы от действия единичной силы и силы P .
Находим прогибы способом Верещагина:

где  – площадь фигуры на грузовой эпюре,
– площадь фигуры на грузовой эпюре,  – ордината под центром тяжести этой фигуры на эпюре единичной силы.
– ордината под центром тяжести этой фигуры на эпюре единичной силы.
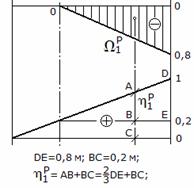
Находим прогиб от единичной силы: площадью фигуры в формуле Верещагина будет площадь эпюры единичной силы, ординатой – ордината под центром тяжести эпюры единичной силы (2/3 высоты эпюры); поэтому:

Находим прогиб от силы P : площадью фигуры будет площадь грузовой эпюры, ординатой – ордината на эпюре единичной силы под центром тяжести грузовой эпюры (рис. 3); поэтому:

Тогда, решая каноническое уравнение получаем:
Неизвестная реакция X 1 равна по величине  и направлена по направлению единичной силы.
и направлена по направлению единичной силы.
2. Определение статического прогиба и динамического коэффициента
а) построение эпюры изгибающих моментов
Определяем реакцию заделки A с учетом реакции отброшенной опоры (рис. 2, е):

Изгибающий момент на 1 участке равен:

в сечении C момент равен 0, в сечении D :

Изгибающий момент на 2 участке:


Строим эпюру изгибающих моментов (рис. 2, ж).
б) построение эпюры единичной силы
В сечении D прикладываем единичную силу и рассматриваем ее действие на раму (рис. 2, з). Момент от единичной силы возникает только на 2 участке рамы:

в сечении D момент равен 0, в сечении A :

Строим эпюру изгибающего момента от единичной силы (рис. 2, и).
в) определение статического прогиба
Определяем статический прогиб с помощью интеграла Мора:
где M и( P ), M и(1) – изгибающие моменты, возникающие под действием силы P и единичной силы.

но т.к. на 1 участке единичная сила момента не создает, то первое слагаемое обращается в ноль:
с учетом моментов, создаваемых силой P и единичной силой на 2 участке получаем:

Учитывая, что сечение рамы круглое, находим его момент инерции:

тогда статический прогиб равен:

Вычисляем динамический коэффициент по приближенной формуле:
3. Определение динамических напряжений и прогибов
Динамические напряжения определяются как:

Учитывая, что сечение рамы круглое, находим его момент сопротивления:

Считая статический изгибающий момент максимальным, действующим в сечениях рамы, находим максимальные динамические напряжения:
Таким образом, максимальные динамические напряжения превышают допустимые напряжения  подбираем новое сечение рамы, исходя из условия прочности:
подбираем новое сечение рамы, исходя из условия прочности:

Округляем диаметр нового сечения рамы до стандартного  выбранного из ряда Ra 40 нормальных линейных размеров (ГОСТ 6636–69), тогда для нового сечения:
выбранного из ряда Ra 40 нормальных линейных размеров (ГОСТ 6636–69), тогда для нового сечения:
Максимальные динамические напряжения, возникающие в раме с новым сечением:

Определяем статический прогиб для рамы с новым сечением:

Пересчитываем динамический коэффициент:
Динамический прогиб в сечении падения груза будет:

Онлайн-калькулятор «Расчет коэффициента динамичности при падении груза на конструкцию»
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Источник
Метод, предложенный Бюргерсом [5], совершенно иной, так как он использует динамическое определение вязкости через напряжения. Тем самым Бюргере избегает, что суш ественно, определения вязкости, основанного на диссипации энергии. Многие исследователи, по-видимому, не знают об этих двух различных методах определения (или фактического экспериментального измерения) вязкости суспензии. [c.510]
Энергетический подход является наиболее предпочтительным в тех случаях, когда требуется определить только максимальные значения напряжений, динамических прогибов и не ставится задача определения законов движения заданной системы. [c.167]
Измерения на натурных деталях и узлах и их металлических моделях сохраняют свое значение и используются в первую очередь для определения действующих нагрузок, оценки условий работы конструкции в натурном выполнении, исследований на воздействия, которые трудно воспроизвести на моделях из пластмасс (неизвестное распределение нагрузок, температурные напряжения, динамические деформации). [c.72]
О (р, Я, г), соответствующее массовой силе т. е. (см. п. 1, 11), если известны вектор смещения и = ( ) и тензор напряжения х = , определенные в 11, то можно вычислить деформации по формулам (5.4) и тем самым определить деформированное и напряженное состояние среды. Но для определения упруго-динамического состояния, соответствующего массовой силе [c.53]
Следует различать статическую и динамическую стабилизации выпрямленного напряжения. Статическая стабилизация — это способность выпрямителя поддерживать номинальное напряжение при медленных измене ниях нагрузки. Однако к выпрямителям для питания усилителей ТЛГ и.ОМ сигналов обязательно предъявляется также требование динамической стабилизации, т. е. поддержания номинального напряжения (с определенным допуском) при быстрых и сильных изменениях нагрузка от нуля до максимального значения. Радиолюбители не всегда уделяют достаточное внимание динамической стабилизации источников питания, от которой существенно зависит качество сигнала (уровень искажений, ширина полосы излучения). [c.210]
При движении звеньев механизма в кинематических парах возникают дополнительные динамические нагрузки от сил инерции звеньев. Так как всякий механизм имеет неподвижное звено-стойку, то и стойка механизма также испытывает вполне определенные динамические нагрузки. В свою очередь через стойку эти нагрузки передаются на фундамент механизма. Динамические нагрузки, возникающие при движении механизма, являются источниками дополнительных сил трения в кинематических парах, вибраций в звеньях и фундаменте, дополнительных напряжений в отдельных звеньях механизма, причиной шума и т. д. Поэтому при проектировании механизма часто ставится задача о рациональном подборе масс звеньев механизма, обеспе- [c.275]
Выше были рассмотрены условия старта макротрещины, обусловленного хрупким или вязким зарождением разрушения в ее вершине. Сам факт такого старта в общем случае не является гарантом глобального разрушения элемента конструкции. Так, для развития трещины по вязкому механизму требуется непрерывное увеличение нагрузки до момента, когда трещина подрастает до такой длины, при которой дальнейший ее рост может быть нестабильным [33, 253, 339, 395]. При хрупком разрушении нестабильное развитие трещины начинается сразу после ее старта, но тем не менее трещина может остановиться, не разрушив конструкции, что может быть связано с малой энергоемкостью конструкции (не хватает энергии на обеспечение динамического роста трещины) или определенной системой остаточных напряжений (попадание трещины в область сжатия). [c.239]
Концентрация напряжений может существенно влиять на общую прочность бруса в случае действия динамической нагрузки. При статической нагрузке и пластичном материале ее можно в расчетах не учитывать, ограничиваясь определением основных напряжений. [c.215]
Вывод расчетных формул для определения динамических напряжений проведем на примере простейшей системы (рис. 581), состоящей из вертикально расположенного упругого призматического [c.626]
Сказанное удобно проиллюстрировать на примере определения максимальных динамических напряжений, возникающих в трех типах стержней при продольном ударе грузом Q, падающим с одной и той же высоты Н. [c.630]
На практике встречаются такие случаи, когда на основании полученных выше формул динамические напряжения найти нельзя. К числу таких задач может быть отнесена, например, задача об определении напряжений в стальном канате, поднимающем груз Q со скоростью о при внезапном торможении подъемника (рис. 586). [c.633]
В расчетах напряжений при ударе [формула (22.41)1 не учитывалась также масса ударяемого тела, которая после прихода в соприкосновение с ударяющим телом приобретает определенные ускорения и тем самым влияет на возникающие в балке динамические напряжения. В некоторых случаях учет массы упругой системы, испытывающей удар, может оказаться также весьма существенным. [c.644]
Тогда формула (22.43) для определения максимального динамического напряжения в балке при ударе с учетом массы балки должна быть записана в виде [c.646]
Расчет деталей сооружений на динамическую нагрузку более сложен, чем расчет на статическую нагрузку. Трудность заключается, с одной стороны, в более сложных методах определения внутренних усилий и напряжений, возникающих от действия динамической нагрузки, и, с другой — в более сложных методах определения механических свойств материалов при динамической нагрузке. [c.287]
В то же время при решении конкретных динамических задач механики разрушения, выдвигаемых практикой, возникает необходимость определения коэффициентов интенсивности напряжений в телах конечных размеров с трещинами. Как правило, для этого привлекаются различные численные методы и строятся численные алгоритмы решения указанных выше задач. [c.318]
На рис. В.З показан стержень, лежащий на упругом основании, ио которому движется сила P t) (или масса, на которую действует сила). Интерес представляет определение прогибов стержня и возникающих в нем напряжений. Подобные задачи возникают при исследовании скоростного движения железнодорожного транспорта. В настоящее время разрабатываются проекты движения поездов при скоростях до 500 км/ч, поэтому вопрос о динамических эффектах, возникающих при движении поезда. [c.4]
Уравнения динамического пограничного слоя используются для определения напряжения трения на поверхности теплообмена, по которому на основе зависимости между теплоотдачей и трением находится величина коэффициента теплоотдачи. Уравнение теплового пограничного слоя используется для оценки распределения температур с последующим определением теплового потока и коэффициента теплоотдачи. [c.322]
Расчет теплоотдачи пластины при турбулентном пограничном слое можно выполнить на основе теории динамического пограничного слоя с использованием интегрального соотношения количества движения, однако отсутствие надежных уравнений для определения напряжения трения на поверхности теплообмена затрудняет этот расчет и заставляет прибегать к информации, полученной из эксперимента. [c.330]
U v), может быть принята любая потерянная скорость в пр< делах потока, например, динамическая скорость. Для определения связи между динамической скоростью и базовой скоростью формулу касательного напряжения (3.20) преобразуем и с учетом формулы (3.31) получим [c.72]
Из уравнения (1.10) следует, что динамическая вязкость р = = т (du/dy) численно равна касательному напряжению т при градиенте скорости du/dy, равном единице, т. е. имеет вполне определенный физический смысл и полностью характеризует вязкость жидкости. [c.11]
В теле при динамическом и импульсивном нагружениях возникают возмущения различной природы (нагрузки, разгрузки, отражения и т. д.), распространяющиеся с определенными конечными скоростями, величина которых зависит от состояния тела и характера деформаций, в виде волн возмущений (волн нагрузки, волн разгрузки, отраженных волн), называемых волнами напряжений. [c.7]
Задачи на определение напряжений с учетом влияния сил инерции решаются па основе известного нз курса теоретической механики метода кинетостатики, позволяющего сводить задачи динамики к задачам статики. Напомним, что, применяя метод кинетостатики, мы придаем уравнениям движения тела вид уравнений равновесия, присоединяя к действующим на тело силам и динамическим реакциям связей силы инерции точек тела. Под силой инерции точки понимают силу, равную по величине произведению массы точки на ее ускорение и направленную в сторону, обратную ускорению. [c.321]
С некоторым приближением, по аналогии с методиками определения скорости по головной дислокации линии скольжения или луча розетки микротвердости, может принять модель цуга дислокаций и попытаться определить скорость движения головной дислокации. Что же касается соблюдения методического условия т = onst, можно полагать, что при минимальной скорости движения траверсы и узком диапазоне изменения напряжений динамическое нагружение приближается к условиям статического. С другой стороны, зависимость скорости движения дислокаций в кремнии от напряжений довольно слабая [454, 455]. Кроме того, как видно из табл. 6, приповерхностный деформированный слой при температурах 680—900 С образуется в довольно узком интервале напряжений, когда конечное значение отличается от начального всего на 10-30%. Исходя из этих соображений, вполне разумно оценить скорость движения дисло-каццй по формуле [c.135]
Определение динамических коэффициентов и напряжений. Динамический коэффициент при падении фуза G на балку KD, опирающуюся на консольные балки АК и DM, определяем по формуле [c.171]
Величина имеет размерность скорости и ее иногда условно на-зьГвают скоростью касательного напряжения или в силу своего чисто динамического определения через величины хо и р—динамической скоростью (следует иметь в виду, что у не является скоростью движения частиц жидкости). Таким образом, [c.234]
Характерным свойством большинства полимеров с достаточно высокой молекулярной массой или степенью сшивки является то, что они представляют собой эластичные твердые веш,ества при комнатной температуре. Если к образцу вязкоэластического твердого полимера приложить постоянную механическую нагрузку (эксперимент по изучению ползучести) или усилие растяжения (эксперимент определения релаксации напряжения), то отклик будет преимуш,ественно эластическим в том случае, если времени для перемещения макромолекул или их сегментов относительно друг друга недостаточно. В отвеТ на механическое воздействие они могут передвигаться путем изменения конфигурации, вытягиваясь и изменяя начальные длины связей и углы между ними. Когда нагрузка снимается, макромолекула возвращается в исходное состояние. Так запасается и освобождается механическая энергия (эластический отклик). Аналогичный процесс запасания и выделения механической колебательной энергии имеет место, если колебательное (синусоидальное) механическое напряжение (динамический эксперимент) прилагается к образцу, причем частота достаточно высока. [c.397]
Исследования показали [49], что при сообщении инструменту ультразвуковых колебаний динамические силы в несколько раз превышают статические нагрузки. Сложение статического напряжения с амплитудой знакопеременного напряжения в определенной части цикла делает суммарное напряжение достаточным для преодоления дислокациями потенциальных барьеров и иолеу раннего пластического течения. Воздействие ультразвука может также активизировать движение дислокаций, задержанных на препятствиях, способствовать зарождению дислокаций внутри существующих источников и таким образом облегчать процесс пластической деформации. Для определения эф- [c.173]
Схема расчета траектории трещины при динамическом ее росте аналогична алгоритму определения траектории усталостной трещины (см. подраздел 4.1.3) при этом вместо анализа нормальных напряжений Оп при двух экстремальных нагрузках Pmin и Ртах вычисляется а при нагрузке Я(т), отвечающей началу очередного шага продвижения трещины на величину AL. [c.244]
Однако определение силы удара (/) по формуле (22.1) весьма затруднительно, так как не известно время соударения, т. е. время, в течение которого скорость движущегося тела снижается от своего максимального значения в момент соприкосновения с ударяемым телом (начало удара) до нуля после деформации последнего (конец удара). В связи с указанными труд-1ЮСТЯМИ, определяя напряжения в элементах упругих систем, вызываемые действием ударных нагрузок (динамические напряжения), в инженерной практике обычно пользуются так называемым энергетическим методом, основанным на законе сохранения энергии. Согласно этому методу полагают, что при соударении движущихся тел уменьшение запаса кинетической энергии их равно увеличению потенциальной энергии. деформации соударяющихся упругих тел. [c.626]
Постепенный отход от расчетных формул в виде произведения многих коэффициентов, рассматриваемых независи-Mbiivtn, к комплексному определению контактных и изгибных напряжений, статических и динамических напряжений, распределения их по контактным линиям и между парами зубьев в зацеплении. [c.487]
Перемещения, а также напряжения, возникающие в упругой системе при ударной нагрузке, могут быть приближенно определены через соответствующие перемещения и напряжения при статическом приложении данной.нагрузки путем умножения их на динамический коэффициент йдин. Динамический коэффициент определяется экспериментально. В простейших случаях он может бйть определен аналитически. [c.268]
Учебное пособие написано в рамках чтения лекций в МГТУ им. Н.Э. Баумана по курсу Конструкционная прочность машиностроительных материалов на факультете Машиностроительные технологии (кафедра Материаловедение ) и предназначено для студентов, обучающихся на материаловедов и машиностроителей. Среди механических свойств конструкционных металлических материалов усталостные характеристики занимают очень важное место. Известно, что долговечность и надежность машин во многом определяется их сопротивлением усталости, так как в подавляющем большинстве случаев для деталей машин основным видом нагружения являются динамические, повторные и знакопеременные на1 рузки, а основной вид разрушения — усталостный. В последние годы на стыке материаловедения, физики и механики разрушения сделаны большие успехи в области изучения физической природы и микромеханизмов зарождения усталостных трещин, а также закономерностей их распространения. Сложность оценки циклической прочности конструкционных материалов связана с тем, что на усталостное разрушение оказывают влияние различные факторы (структура, состояние поверхностного слоя, температура и среда испытания, частота нагружения, концентрация напряжений, асимметрия цикла, масштабный фактор и ряд других). Все это сильно затрудняет создание общей теории усталостного разрушения металлических материалов. Однако в общем случае процесс устаттости связан с постепенным накоплением и взаимодействием дефектов кри-сталтгической решетки (вакансий, междоузельных атомов, дислокаций и дискли-наций, двойников, 1 раниц блоков и зерен и т.п.) и, как следствие этого, с развитием усталостных повреждений в виде образования и распространения микро — и макроскопических трещин. Поэтому явлению усталостного разрушения присуща периодичность и стадийность процесса, характеризующаяся вполне определенными структурными и фазовыми изменениями. Такой анализ накопления струк-туршз1х повреждений позволяет отвлечься от перечисленных выше факторов. В учебном пособии кратко на современном уровне рассмотрены основные аспекты и характеристики усталостного разрушения металлических материалов. [c.4]
В схемы устройств для измерения кинематических и динамических параметров процесса распространения волн напряжений входят датчики, являющиеся преобразователями механических возмущений в электрические сигналы, и измерительная аппаратура, позволяющая регистрировать эти сигналы. Рассмотрим принцип работы и устройство датчиков и измерительной аппаратуры. Установим требования, предъявляемые к ним, на примере аксельрометра [прибора для замера ускорения, представляющего собой систему с одной степенью свободы и состоящую из инерционного элемента массы М, упругого чувствительного элемента с жесткостью К. и демпфера с коэффициентом затухания т (рис. 14)]. При определенных допущениях [1] систему можно считать линейной и ее движение характеризовать уравнением X + 20х Ь = / t), решение которого имеет вид X = gn/(o — Г], (1.2.10) [c.24]
При динамическом нагружении тела возмущения распространяются с определенной конечной скоростью в виде волн напряжений. Фронт волны напряжений является поверхностью разрыва 5, на которой дожны выполняться кинематические и динамические условия. В момент времени I с одной стороны поверхности 5 среда возмущена, имеют место перемещения и ее частиц с другой стороны поверхности среда находится в покое, перемещений частиц нет. Однако выполнение гипотезы сплошности среды (материала тела) требует, чтобы при переходе через поверхность 3 перемещения оставались непрерывными, вследствие чего они должны исчезать на поверхности 3 [c.36]
Параметры ДЛтпрь Отпрг находим в результате решения системы уравнений (1.3.79), учитывая физико-механические свойства материала фиктивного тела при разгрузке. Итак, тензор А (Т) построен, следовательно, определен и тензор кинетических напряжений (Т )рдзгр-Все вышеизложенное позволяет исследовать напряженное состояние тела при нагрузке и разгрузке в условиях динамического нагружения, которому соответствует распространение волн напряжений в теле. [c.70]
Изучение состояния преграды в области внедрения сводится к определению давления среды на поверхность внедряющегося тела и характеристик напряженно-деформированного состояния среды в пограничном слое. Исследование проводится в цилиндрических координатах г, 9, 2 при следующих предположениях а) материал преграды идеально пластический с характеристикой о., д-, б) внедряющееся тело абсолютно жесткое, причем геометрическая форма при аэродинамическом и переходном внедрении известна, при кратерном внедрении форма тела сферическая в) сопротивление преграды внедрению можно представить в виде совокупности двух составляющих собственного сопротивления Одод и динамического сопротивления Один- [c.162]