Содержание
- Определение и формула жесткости пружины
- Формула жесткости соединений пружин
- Примеры задач с решением
- Типы пружин
- Физические характеристики пружин
- Понятие жесткости
- Расчет жесткости цилиндрической пружины
Определение и формула жесткости пружины
Силу, которая возникает в результате деформации тела и пытающаяся вернуть его в исходное состояние, называют силой упругости.
Чаще всего ее обозначают $<overline>_$. Сила упругости появляется только при деформации тела и исчезает, если пропадает деформация. Если после снятия внешней нагрузки тело восстанавливает свои размеры и форму полностью, то такая деформация называется упругой.
Современник И. Ньютона Р. Гук установил зависимость силы упругости от величины деформации. Гук долго сомневался в справедливости своих выводов. В одной из своих книг он привел зашифрованную формулировку своего закона. Которая означала: «Ut tensio, sic vis» в переводе с латыни: каково растяжение, такова сила.
Рассмотрим пружину, на которую действует растягивающая сила ($overline$), которая направлена вертикально вниз (рис.1).
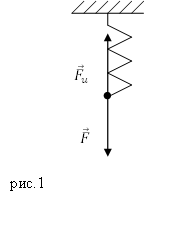
Силу $overline$ назовем деформирующей силой. От воздействия деформирующей силы длина пружины увеличивается. В результате в пружине появляется сила упругости ($<overline>_u$), уравновешивающая силу $overline$. Если деформация является небольшой и упругой, то удлинение пружины ($Delta l$) прямо пропорционально деформирующей силе:
где в коэффициент пропорциональности называется жесткостью пружины (коэффициентом упругости) $k$.
Жесткость (как свойство) — это характеристика упругих свойств тела, которое деформируют. Жесткость считают возможностью тела оказать противодействие внешней силе, способность сохранять свои геометрические параметры. Чем больше жесткость пружины, тем меньше она изменяет свою длину под воздействием заданной силы. Коэффициент жесткости — это основная характеристика жесткости (как свойства тела).
Коэффициент жесткости пружины зависит от материала, из которого сделана пружина и ее геометрических характеристик. Например, коэффициент жесткости витой цилиндрической пружины, которая намотана из проволоки круглого сечения, подвергаемая упругой деформации вдоль своей оси может быть вычислена как:
где $G$ — модуль сдвига (величина, зависящая от материала); $d$ — диаметр проволоки; $d_p$ — диаметр витка пружины; $n$ — количество витков пружины.
Единицей измерения коэффициента жесткости в Международной системе единиц (Си) является ньютон, деленный на метр:
Коэффициент жесткости равен величине силы, которую следует приложить к пружине для изменения ее длины на единицу расстояния.
Формула жесткости соединений пружин
Пусть $N$ пружин соединены последовательно. Тогда жесткость всего соединения равна:
где $k_i$ — жесткость $i-ой$ пружины.
При последовательном соединении пружин жесткость системы определяют как:
Примеры задач с решением
Задание. Пружина в отсутствии нагрузки имеет длину $l=0,01$ м и жесткость равную 10 $frac<Н><м>. $Чему будет равна жесткость пружины и ее длина, если на пружину действовать силой $F$= 2 Н? Считайте деформацию пружины малой и упругой.
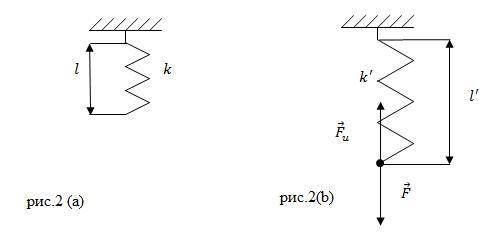
Решение. Жесткость пружины при упругих деформациях является постоянной величиной, значит, в нашей задаче:
При упругих деформациях выполняется закон Гука:
[F=kDelta l left(1.2
ight).]
Из (1.2) найдем удлинение пружины:
Длина растянутой пружины равна:
Вычислим новую длину пружины:
Ответ. 1) $k’=10 frac<Н><м>$; 2) $l’=0,21$ м
Задание. Две пружины, имеющие жесткости $k_1$ и $k_2$ соединили последовательно. Какой будет удлинение первой пружины (рис.3), если длина второй пружины увеличилась на величину $Delta l_2$?
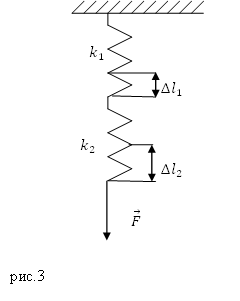
Решение. Если пружины соединены последовательно, то деформирующая сила ($overline$), действующая на каждую из пружин одинакова, то есть можно записать для первой пружины:
Для второй пружины запишем:
Если равны левые части выражений (2.1) и (2.2), то можно приравнять и правые части:
[k_1Delta l_1=k_2Delta l_2left(2.3
ight).]
Из равенства (2.3) получим удлинение первой пружины:
Ответ. $Delta l_1=frac$
Недеформированная пружина жесткостью К, укрепленная на гладком горизонтальном стержне, имеет длину l. На свободном конце пружины закрепили шарик массой m. При вращении системы с угловой скоростью w (амега) шарик растягивает пружину. Найти длину пружины при вращении.
Как вывести формулу l=kl1/k-mw^2 для этой задачи??
Пружина — упругий объект, целенаправленно подвергающийся сжатию или растяжению, в результате чего может запасать энергию, а затем, при ослабевании внешней деформирующей силы, возвращать ее. Пружины в нормальных условиях не должны подвергаться остаточным (пластическим) деформациям, т.е. таким воздействиям, после которых форма изделия уже не восстанавливается вследствие нарушения структуры их материала.
Типы пружин
Пружины можно классифицировать по направлению прилагаемой нагрузки:
- пружины растяжения; предназначены для работы в режиме растягивания, при деформации их длина увеличивается; как правило, такие устройства имеют нулевой шаг, т.е. намотаны «виток к витку»; примером могут служить пружины в весах-безменах, пружины для автоматического закрытия дверей и т.д.;
- пружины сжатия под нагрузкой, напротив, укорачиваются; в исходном состоянии между их витками есть некоторое расстояние, как, например, в амортизаторах автомобильных подвесок.
В данной статье рассматриваются пружины, представляющие собой цилиндрические спирали. В технике применяется много других разновидностей упругих устройств: пружины в виде плоских спиралей (используются в механических часах), в виде полос (рессоры), пружины кручения (в точных весах), тарельчатые (сжимающиеся конические поверхности) и т.п. Своего рода пружинами являются амортизирующие изделия из полимерных эластичных материалов, прежде всего резины. Во всех этих устройствах используется один и тот же принцип — запасать энергию упругой деформации и возвращать ее.
Попробуй обратиться за помощью к преподавателям
Физические характеристики пружин
Цилиндрические пружины характеризуются рядом параметров, сочетание которых обуславливает их жесткость — способность сопротивляться деформации:
- материал; пружины чаще всего изготавливают из стальной проволоки, причем сталь в них применялася особая, ее характеризует среднее или высокое содержание углерода, низкое содержание других примесей (низколегированный сплав) и особая термообработка (закалка), придающая материалу дополнительную упругость;
- диаметр проволоки; чем он меньше, тем эластичнее пружина, но тем меньше ее способность запасать энергию; пружины сжатия изготавливают, как правило, из более толстой проволоки, чем пружины растяжения;
- форма сечения проволоки; не всегда проволока, из которой намотана пружина, имеет круглое сечение; уплощенное сечение имеют пружины сжатия, чтобы при максимальном сокращении длины (виток «садится» на соседний виток) конструкция была более устойчивой;
- длина и диаметр пружины; длину пружины следует отличать от длины проволоки, из которой она намотана; эти два параметра согласуются через количество витков и диаметр пружины, который, в свою очередь, не следует путать с диаметром проволоки.
Задай вопрос специалистам и получи
ответ уже через 15 минут!
Существуют и другие физические характеристики, влияющие на работоспособность пружин. Например, при повышении температуры металл становится менее упругим, а при существенном ее понижении может стать хрупким. При интенсивной эксплуатации пружина со временем теряет часть упругости по причине постепенного разрушения связей между атомами кристаллической решетки.
Понятие жесткости
Жесткость как физическая величина характеризует силу, которую нужно приложить к пружине для достижения определенной степени растяжения или сжатия.
Коэффициент жесткости рассчитывается по формуле Гука:
где $F$ — сила, развиваемая пружиной, $k$ — коэффициент жесткости, зависящий от ее характеристик (см. выше) и измеряемый в ньютонах на метр, $x$ — абсолютное приращение расстояния, на которое изменилась длина пружины после приложения внешней силы. Знак минус в правой части формулы свидетельствует о том, что сила, порождаемая пружиной, действует в противоположном по отношению к нагрузке направлении.
Коэффициент жесткости можно вычислить экспериментально, подвешивая на расположенную вертикально и закрепленную за верхний конец пружину грузы с известной массой. В этом случае имеет место зависимость
$m cdot g — k cdot x = 0$,
где $m$ — масса, $g$ — ускорение свободного падения. Отсюда
Расчет жесткости цилиндрической пружины
Довольно просто понять как работает плоская пружина. Если положить на край письменного стола линейку и прижать один ее конец рукой к поверхности, но второй можно упруго изгибать, запасая и высвобождая энергию. Очевидно, что в момент изгиба расстояния между молекулами материала в некоторых фрагментах линейки увеличиваются, в некоторых уменьшаются. Электромагнитные связи, действующие между молекулами, стремятся вернуть вещество к прежнему геометрическому состоянию.
Несколько сложнее дело обстоит с цилиндрической пружиной. В ней энергия запасается не благодаря деформации изгиба, а за счет скручивания проволоки, из которой пружина навита, относительно продольной оси этой проволоки.
Представим сильно увеличенное сечение проволоки, из которой навита цилиндрическая пружина, выполненное перпендикулярной ее оси плоскостью. При таком рассмотрении можно абстрагироваться от спиральной формы и мысленно разбить весь объем проволоки на множество соприкасающихся торцевыми поверхностями «цилиндров», диаметр которых равен диаметру проволоки, а высота стремится к нулю. Между соприкасающимися торцами действуют молекулярные силы, препятствующие деформации.
При растяжении или сжатии пружины угол наклона между витками изменяется. Соседние «цилиндры» при этом вращаются друг относительно друга в противоположных направлениях вокруг общей оси. В каждом таком сечении запасается энергия. Отсюда следует, что чем из более длинного куска проволоки навита пружина (здесь играют роль диаметр и высота цилиндра, а также шаг витка), тем большее количество энергии она способна запасти. Увеличение диаметра проволоки также повышает ее энергоемкость. В целом формула, учитывающая основные факторы жесткости пружины, выглядит так:
- $R$ — радиус цилиндра пружины,
- $n$ — количество витков проволоки радиуса $r$,
- $G$ — коэффициент, зависящий от материала.
Рассчитать коэффициент жесткости пружины, выполненной из стальной проволоки с $G = 8 cdot 10^<10>$ Па и диаметром 1 мм. Радиус пружины 20 мм, количество витков — 25.
Подставим в формулу числовые значения, попутно переведя их в единицы системы СИ:
Ответ: $100 frac<Н><м>$
Так и не нашли ответ
на свой вопрос?
Просто напиши с чем тебе
нужна помощь

NettaBlackRouse
+10
Решено
8 лет назад
Физика
5 — 9 классы
Что бы пружина удлинилась до 15 см нужно приложить силу 45Н, а до 18 см — 72Н. Как найти длину пружины в недеформирлванном состоянии?
Смотреть ответ
2
Ответ
3
(8 оценок)
16

flustikova
8 лет назад
Светило науки — 5 ответов — 0 раз оказано помощи
Обозначим длину недеформированной пружины за L, тогда пружина растянется на (15-L) и (18-L)см в 1 и 2 случае соответственно.
k(15-L)=45,
k(18-L)=72,
делишь одно уравнение на второе, решаешь и получаешь L=10 см
(8 оценок)
Ответ
2
(6 оценок)
3

ваапкек
8 лет назад
Светило науки — 125 ответов — 0 раз оказано помощи
ΔL=l0-l ( Закон Гука)
(6 оценок)
https://vashotvet.com/task/7350582
Деформации. Силы упругости. Закон Гука
Деформация и ее виды
Способность к упругим и пластическим деформациям зависит от природы вещества, из которого состоит тело, условий, в которых оно находится; способов его изготовления. Например, если взять разные сорта железа или стали, то у них можно обнаружить совершенно разные упругие и пластичные свойства. При обычных комнатных температурах железо является очень мягким, пластичным материалом; закаленная сталь, наоборот, — твердый, упругий материал. Пластичность многих материалов представляет собой условие для их обработки, для изготовления из них нужных деталей. Поэтому она считается одним из важнейших технических свойств твердого вещества.
При деформации твердого тела происходит смещение частиц (атомов, молекул или ионов) из первоначальных положений равновесия в новые положения. При этом изменяются силовые взаимодействия между отдельными частицами тела. В результате в деформированном теле возникают внутренние силы, препятствующие его деформации.
Различают деформации растяжения (сжатия), сдвига, изгиба, кручения.
Силы упругости
Силы упругости имеют электромагнитную природу. Они препятствуют деформациям и направлены перпендикулярно поверхности соприкосновения взаимодействующих тел, а если взаимодействуют такие тела, как пружины, нити, то силы упругости направлены вдоль их оси.
Силу упругости, действующую на тело со стороны опоры, часто называют силой реакции опоры.
Абсолютное удлинение:
![[x=Delta l=l-l_0]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-486bf1c1ceebc465fec1e5e848b74a6c_l3.png "Rendered by QuickLaTeX.com")
где  и
и  длина тела в деформированном и недеформированном состоянии соответственно.
длина тела в деформированном и недеформированном состоянии соответственно.
Относительное удлинение:
![[varepsilon =frac{Delta l}{l_0} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3fb8a5bf6b71646d7a642ba2a5f57309_l3.png "Rendered by QuickLaTeX.com")
Закон Гука
Небольшие и кратковременные деформации с достаточной степенью точности могут рассматриваться как упругие. Для таких деформаций справедлив закон Гука:
- Сила упругости, возникающая при деформации тела прямо пропорциональна абсолютному удлинению тела и направлена в сторону, противоположную смещению частиц тела:
![[F_x=-kx]](data:image/svg+xml,%3Csvg%20xmlns='http://www.w3.org/2000/svg'%20viewBox='0%200%2081%2016'%3E%3C/svg%3E "Rendered by QuickLaTeX.com")
![[F_x=-kx]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-7499e62f2008d4957080b74a8e8d7427_l3.png "Rendered by QuickLaTeX.com")
где  проекция силы на ось
проекция силы на ось  жесткость тела, зависящая от размеров тела и материала, из которого оно изготовлено, единица жесткости в системе СИ Н/м.
жесткость тела, зависящая от размеров тела и материала, из которого оно изготовлено, единица жесткости в системе СИ Н/м.
Примеры решения задач
Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Длина — недеформированная пружина
Cтраница 1
Длина недеформированной пружины, а — коэффициент про порциональности.
[1]
Обозначим через I длину недеформированной пружины.
[2]
Какую максимальную скорость приобретет шар при своем движении, если расстояние между точками закрепления пружины не превышает удвоенной длины недеформированной пружины.
[3]
Найти максимальную скорость, которую приобретает шарик при своем движении, если расстояние между точками закрепления пружин не превышает удвоенной длины недеформированной пружины.
[4]
При указанном на рис. 1.2 выборе направления оси х проекция силы, действующей на груз в положении равновесия со стороны правой пружины, равна k ( s — se), где s0 — длина недеформированной пружины, а, s — расстояние между концами пружины при равновесном положении груза.
[5]
В таблице обозначено: G, G2 — веса тел, р — вес единицы длины тяжелой нити, ленты; L — длина нити; с — коэффициент жесткости пружины / — деформация пружины при ф 0; у — вес единицы длины стержня; / — длина недеформированной пружины; R — радиус диска; Ь, / — конструктивные размеры.
[6]
В таблице обозначено: G, G2 — веса тел / р — вес единицы длины тяжелой нити, ленты; L — длина нити; с — коэффициент жесткости пружины; / — деформация пружины при ф 0; у — вес единицы длины стержня; / () — длина недеформированной пружины; R — радиус диска; 6, / — конструктивные размеры.
[7]
В таблице обозначено: Gi, G2 — веса тел; р — вес единицы длины тяжелой нити, ленты; L — длина нити; с — коэффициент жесткости пружины; / — деформация пружины при ( р 0; 7 — вес единицы длины стержня; ( о — длина недеформированной пружины; R — радиус диска; Ь, I — конструктивные размеры.
[8]
У — За координату х принять удлинение пружины, отсчитываемое в сторону того из тел 3, 4 или 5 системы, к которому пружина прикреплена; например, если пружина прикреплена к этому телу в точке В и ее длина в произвольный момент времени равна ЛВ, то х — ЛВ — / 0, где / 0 — длина недеформированной пружины. За координату ф принять угол поворота крайнего блока ( этот блок может быть и невесомым), отсчитывая Ф от начального положения. Если в систему ни один блок не входит, а входят лишь тела 3 и 4, за координату у принять расстояние тела 4 от начального положения. Соответствующие примеры даны на рис. ДП.
[9]
Длина недеформированной пружины равна 65 см, а при равновесии груза на пружине ее длина равна 85 см. Определить: 1) уравнение движения груза; 2) амплитуду и период колебаний; 3) наибольшую упругую силу пружины.
[10]
Длина недеформированной пружины равна 65 см, а при равновесии груза на пружине ее длина равна 85 см. Определить: 1) уравнение движения груза; 2) амплитуду и период колебаний; 3) наибольшую упругую силу пружины.
[11]
Остается вычислить кинетическую энергию пружины. Введем обозначения: / — длина недеформированной пружины, — плотность пружины.
[12]
О 2.4.16; Две бусинки массы т каждая, связанные друг с другом пружиной жесткости k, удерживают на гладких жестко закрепленных в стене стержнях. Расстояние между свободными концами стержней равно длине недеформированной пружины. С какой скоростью будет двигаться пружина в направлении х после того, как бусинки соскочат со стержня.
[13]
Чему будет равен период колебаний груза массой т, скрепленного с одним из концов данной пружины, если второй конец пружины неподвижен, а груз скользит по гладкой горизонтальной поверхности. Деформация пружины во всех случаях мала по сравнению с длиной недеформированной пружины.
[14]
Тело Е, масса которого равна т, находится на гладкой горизонтальной плоскости. К телу прикреплена пружина жесткости с, второй конец которой прикреплен к шарниру Оь Длина недеформированной пружины равна / 0; 00 I. В начальный момент тело Е отклонено от положения равновесия О на конечную величину ОЕ а и отпущено без начальной скорости.
[15]
Страницы:
1
2