Материалы этого поста задержались с выходом в свет на 4 месяца. Мы — молодая команда разработчиков, и только учимся нарушать dead-лайны, но кажется, что получается уже неплохо. Предыстория в этой статье, где мы и обещали выложить продолжение. Рассказ пойдёт о том, как же наше приложение работает (или не работает, решать читателю).
Какое приложение? Мы — команда проекта Viewaide (бывший EyeDoc) и пишем софт, который при помощи веб-камеры определяет параметры усталости глаз и выводит уведомления, задача которых снизить риск ухудшения зрения вследствие долгой работы у монитора. Чем 100 раз услышать, лучше 1 раз увидеть.
Скачать и попробовать можно по этой ссылке, как говорится, “бесплатно, без смс”. Кроме софта, у нас имеется ещё и часть web-сервиса, но обо всём по порядку.
О том, как нам больно осознавать, что монитор вреден для глаз, описано в предыдущей статье, но вкратце хочется сказать, что заниматься такими вещами мы начали не ради наживы (хотя кто от неё откажется), а ради решения собственной проблемы. Еще год назад, когда мы только начинали работу над проектом, проблема стояла остро: один сооснователь с трудом ловил маршрутки, а второй активно приближался к показателям зрения первого. Чтобы не быть голословным, немного цифр.

Компьютерный зрительный синдром (КЗС) — это временное состояние, возникающее в результате длительной беспрерывной фокусировки глаз на дисплее.
По некоторым источникам, зрительным симптомам данного синдрома подвергается около 75% людей, которые работают за компьютером более 3 часов в день.
КЗС возникает в результате усталости глаз, следствием чего являются: головные боли, затуманенное зрение, покраснение в глазах, напряжение, усталость, сухость глаз, а в результате — потеря остроты зрения. Также это может послужить поводом для развития более серьезных глазных заболеваний. Что уж говорить, если около 40 миллионов американцев страдают от синдрома сухого глаза. Симптомы сухого глаза являются причиной № 1 для визитов к офтальмологу в Соединенных Штатах.
Изучив подробнее материал по этой теме в сети, пообщавшись с офтальмологами, мы узнали, что усталость глаз можно определить по некоторым параметрам:
- прищуривание
- частота моргания
- средняя дистанция между монитором и юзером и т.д.
Это именно те факторы, по которым можно определить, устали ли глаза у человека. А впоследствии и само игнорирование этих мелочей может еще больше усугубить ситуацию.
Откровенно говоря, идея пришла не после дотошного исследования рынка и анализа современных тенденций IT, а после того, как мы подумали: “Чего бы такого закодить, чтоб покруче?” Год назад крутым показался Image Processing. Затем мы пораскинули мозгами: “Web-камера постоянно перед носом, неужели она нужна только для того, чтобы поговорить в Skype?” Хотелось создать не только что-то крутое, но и полезное. Так и появилась мысль, что если глаза всегда находятся в зоне видимости камеры, то нужно только правильно обработать их изображение, учитывая различные факторы (параметры усталости глаз приведены выше), и авось что-то получится.
Выбор средств разработки пал на Qt + OpenCV. Qt приглянулся не только потому, что был красивого зелёного цвета, c удобным редактором кода и подсветкой синтаксиса, а и потому, что давал шанс создавать кроссплатформенные приложения людям с закалкой С++. Сейчас зарождается надежда на то, что можно будет писать полноценные мобильные приложения. Поживём — увидим. Если Qt отвечал за GUI, то нужно было еще что-то для работы с изображениями. OpenCV — библиотека, написанная адептами компьютерного зрения из Intel. В ней есть очень подробная документация и множество примеров в сети. Ах да, все эти инструменты разработки являются бесплатными, в том числе и для коммерческого пользования, что является большим плюсом.
Задача №1 Получить изображения глаз с помощью web-камеры.
Если с изображением можно совершать какие-то манипуляции, то для начала его нужно получить. А в данном случае достаточно получить всего лишь изображение глаз. Получение потокового видео из web-камеры опустим, в сети имеется предостаточно примеров.
Поиск объектов на изображении в OpenCV реализован методом Виолы-Джонса. Тема распознавания образов не пристрастна к частым инновациям, метод был представлен в 2001 году, и спустя 13 лет всё ещё является ведущим в своей области. Если вкратце, метод подставляет к изображению так называемые примитивы Хаара, которые являются набором элементарных сочетаний тёмных и светлых областей, и если на изображении найдена область, в которой подходит достаточное количество примитивов, то объект найден. Для того чтобы понять, светлая эта область или тёмная, необходимо просуммировать значение соседних пикселей. Для того чтобы не делать это много раз в процессе поиска объекта, изображение переводится в интегральное представление. Несмотря на все оптимизации по скорости работы метода, поиска лица на видео в real-time на бюджетном ПК добиться нельзя. Или всё же можно?

Итак, задача — найти глаза пользователя с помощью web-камеры. Возьмем изображение разрешения 640х480.
сvHaarDetectObjects(frame,left_eye_cascade,storage,1.1,3,CV_HAAR_DO_CANNY_PRUNING,cvSize(22,22);Цель этой функции — найти левый глаз. Если решать задачу в лоб, то скорость будет просто ужасной, а загрузка процессора слишком большой для фонового приложения. К тому же произойдет много лишних срабатываний. Поэтому решено — нужно начинать с поиска лица.
сvHaarDetectObjects(frame,face_cascade,storage,1.1,3,CV_HAAR_DO_CANNY_PRUNING,cvSize(80,80);Работает уже пошустрее. Что же изменилось? Последний аргумент функции определяет минимальный размер искомого объекта. В многочисленных примерах OpenCV указано, что для глаз нужно искать область как минимум 22х22 пикселя, а для лица можно и 80х80. Тут становится понятно, почему поиск лица работает быстрее: пройти по всему изображению областью 22х22 — это далеко не так быстро, как 80х80. Для сравнения, на моей машине Intel Core 2 Duo 2.2 GHz, RAM 2 Gb функция поиска глаз осуществляется в среднем за 900 миллисекунд, а поиск лица – за 200 миллисекунд.
Как известно, лицо не квадратное (если только наш пользователь не Губка Боб). Давайте сделаем минимальную область поиска прямоугольной. При таких цифрах время работы занимает уже 160 миллисекунд.
сvHaarDetectObjects(frame,face_cascade,storage,1.1,3,CV_HAAR_DO_CANNY_PRUNING,cvSize(80,120);Что это за 3-й аргумент, равный 1.1? Это шаг, с которым “поисковое окно” расширяется. То есть, если не нашлось лица с размерами 80х120, то размер умножается на 1.1. А что если увеличивать не на 10%, а на 20%? Неплохо, время работы уже 100 миллисекунд.
сvHaarDetectObjects(frame,face_cascade,storage,1.2,3,CV_HAAR_DO_CANNY_PRUNING,cvSize(80,120);И ещё одна мысль. Зачем нам изображение 640х480? Если уменьшить его в 2 раза (теперь 320х240), то и искать нужный объект можно быстрее. Уменьшив изображение, мы видим, что лицо видно всё так же хорошо. Логично, что и скорость увеличилась в 2 раза, время работы — 50 миллисекунд.


сvHaarDetectObjects(frame,face_cascade,storage,1.2,3,CV_HAAR_DO_CANNY_PRUNING,cvSize(40,60);Поиск лица работает более или менее сносно, но нам всё-таки нужны глаза. Нет смысла искать их на всём лице. Лучше выделить области, где они в принципе могут располагаться. Идею легко проиллюстрировать.

Уже внутри этих областей мы и будем искать глаза. Согласитесь, что объёма работы стало значительно меньше по сравнению с объемом работы при поиске по всему изображению. К тому же, вероятность ложного срабатывания уже невысока.
А нужно ли нам искать лицо в каждом кадре? Вряд ли. Главная цель — найти глаза. Чтобы не усложнять процессору жизнь, усложним её себе. Когда глаз найден, берём прямоугольник, в котором он находится, и увеличиваем площадь в 2 раза. Затем накладываем эту область на следующий кадр видео с web-камеры, и вуаля! При достаточно высоком fps (а мы только что постарались, чтобы ускорить обработку каждого кадра) в этой области очень вероятно найти наш глаз.

На скриншоте — основные этапы оптимизированного поиска глаз. Если глаза не будут найдены, то после нескольких попыток нужно вернуться к поиску лица.Теперь функция поиска, со всеми её составляющими, занимает в среднем 30 миллисекунд процессорного времени, что в 30 раз меньше, чем подход “в лоб”.
Задача №2 Определение расстояния до монитора.
Для решения данной задачи нам запредельно помогла эта статья.В данном примере автор приводит нам достаточно простую геометрию, демонстрируя работу веб-камеры:

В этом случае, мы видим, что треугольники ABC и ECD подобны. Проведем две высоты от точки С и уберем всю лишнюю информацию.

Теперь, глядя на геометрический вариант работы веб-камеры, мы понимаем, что отношение сторон AB/CF равно отношению ED/CH. Давайте же вычислим это соотношение. Делается это очень даже просто. Расположим линейку 10-и см длиной перед веб-камерой так, чтобы она вмещалась в кадр от края до края. После чего, измерим расстояние от камеры до линейки. Наш результат будет равен 16 см. Отношение расстояния к длине линейки, соответственно, 16/10=1.6.
Если область лица полностью войдет в кадр, мы получим расстояние, равное 24-м см (1.6*15). Почему 15 см? Потому что средняя длина лица человека именно такая. Погрешность из-за усреднённого значения почти незаметна (только если вы, повторюсь, не Губка Боб). Теперь дело за малым. Нужно определить расстояние, если лицо занимает менее 100% в кадре. Для этого достаточно определить количество сантиметров в одном проценте. А это 24/100=0.24. Таким образом, мы вычисляем, что расстояние до монитора = 24 + (100% — процент занятого пространства лицом в кадре) * 0.24.
В действительности, мы берем за точку отсчёта не область лица, а расстояние между глазами. Это обусловлено тем, что поиск глаз осуществляется при каждой итерации работы приложения, а поиск лица — только при необходимости. Да и вообще, It`s all about eyes.
Задача №3 Определение прищуривания/моргания.
В общем-то, прищуривание — параметр очень субъективный. И можно было бы не задумываться о нем, если бы не замечания родителей в детстве “не щурься, юзернейм”. Тем не менее о его реализации нужно рассказать, так как отсюда вытекает распознавание морганий.
Вопрос первый: что отличает полностью открытый глаз от полузакрытого или закрытого? Расстояние между веками. Значит, его и нужно искать. На изображении веки представлены тонкой границей цветового перехода. Тогда решением становится поиск границы на изображении.
Между делом, хотелось бы посоветовать весьма занимательную книгу Марр Д. — Зрение. Информационный подход к изучению представления и обработки зрительных образов. В ней описан достаточно интересный подход к человеческому зрению в соответствии с теорией информации. Если придерживаться описываемой в приведённой литературе теории, то даже такие чудеса зрения, как стереоскопия, начинаются с поиска границ на изображении. Самый популярный детектор границ — детектор границ Кенни. То ли изображение было уж очень маленьким, то ли руки были кривые, то ли луна не в той фазе пребывала, но результаты оказались неточными, поэтому пришлось немного углубиться в детали.

Классический поиск границ мы начинаем с применения фильтра Гаусса, который помогает избавиться от шумов. На деле же оказывается, что изображения глаз настолько малы и пикселизированны, что в дополнительном размытии не нуждаются. Следующий шаг — поиск граней. Грани являются ничем иным, как резкими цветовыми переходами. Для удобства можно преобразовать изображение в монохромное. Всё равно границы век представляют собой контрастный переход, а чёрно-белое изображение прекрасно это отражает, только обрабатывать его легче.
Чтобы найти резкий переход яркости, мы используем дифференциальный оператор (для данной операции лучше всего подходит оператор Лапласса. Так же применяют оператор Собеля). Не вдаваясь в подробности, давайте подумаем, почему дифференциальный? Если края представляют собой резкий цветовой переход, то разница между суммой значений соседних пикселей на границе и возле неё должна быть больше, чем на области одного цвета. Если заменить “сумма значений пикселей” словом “функция”, то понятно, что нас интересует места резкого её изменения. Как раз для таких ситуаций товарищи Лейбниц и Ньютон придумали дифференциальное исчисление.
сvLaplace(eye, dst, 9);OpenCV имеет готовую реализацию данного оператора с простым применением. Поэтому достаточно указать исходное изображение, адрес для результирующего, а так же размерность квадратной матрицы пикселей, которым оператор будет “идти” по изображению, совершая обряд дифференциала.
Чтобы убрать лишние участки в области выделения, да и вообще облегчить себе жизнь, можно бинаризировать изображение (проще говоря, оставить всего 2 цвета: чёрный и белый, никаких оттенков). Для этого можно воспользоваться пороговым преобразованием. Для начала считаем средний цвет пикселей, а затем всё, что ниже этого значения, преобразуем в чёрное, что выше — в белое.
cvThreshold(dst,dst,threshold,255,CV_THRESH_BINARY);Здесь threshold и есть наше среднее значение. Далее необходимо выполнить несколько косметических улучшений, таких как: кластеризация белых пикселей (граней), чтобы выделить наибольшие скопления и удалить ложные; сортировка кластеров по площади (но это уже не столь важно, к тому же не хочется утомлять читателя или забрасывать его кодом, особенно, если он дочитал досюда, что уже приятно).Проиллюстрируем поэтапно вышеописанный процесс.

Остаётся только посчитать количество пикселей между верхней границей и нижней (верхним и нижним веком) и сравнить с нормальным состоянием, которое сохраняется во время калибровки.
Ах да, как же реализовать распознавание моргания? Всё просто, закрытый глаз характеризуется тем, что его верхнее веко ниже средней линии глаза, именно это условие и проверяется.

Задача №4 — Определение уровня освещения.
Уровень освещения также играет важную роль, если вы беспокоитесь о своем зрении. Рабочую зону можно считать не слишком удачно организованной, если вы работаете в темной комнате, а яркий дисплей запредельно слепит ваши глаза. Также лучше не стоит засиживаться перед компьютером, если за экраном вам в глаза светит другой яркий источник света. Еще не надо забывать о бликах, которые монитор может создавать от источника света, располагающийся у вас за спиной. Вряд ли возможно полностью устранить такую проблему с помощью веб-камеры. Но мы все же попытались осуществить частичное ее решение.
Итак, что для этого нужно сделать? Для начала нам необходимо разделить изображение на 2 части: лицо и все остальное, то есть фон. Мы будем сравнивать яркость этих двух картинок. Можно с легкостью преобразовать изображение в монохромное, так как нам неважно, какую насыщенность считать, суммарную или разделенную по трем каналам (RGB). Следующий наш шаг состоит в том, чтобы построить гистограммы по двум изображениям. Эта процедура необходима нам для того, чтобы впоследствии иметь представление об общем уровне яркости изображения.
В итоге, по горизонтальной оси представлена яркость, а по вертикали — относительное число пикселей с конкретным значением яркости. Далее мы условно делим пиксели на светлые и темные. Из каждого изображения выделяется 4 группы. Теперь при определенном анализе и сравнении между собой этих 4 групп мы можем сделать несколько выводов: когда все кол-во темных пикселей значительно преобладает и на лице, и на фоне, то, мы работаем в темной комнате, а свечение издает лишь монитор. Когда кол-во светлых пикселей на лице значительно больше, чем на фоне, то значит, что за монитором есть еще какой-то источник света, который светит нам прямо в лицо. Это может быть как настольная лампа, так и солнце за окном. Пример разбиения изображения на лицо и фон с последующим построением гистограмм представлен ниже.

В данном случае пользователь находится в тёмной комнате, а настольная лампа светит прямо в лицо, что не есть правильно. Вполне логично полагать, что здесь мы не можем учитывать разницу между кол-вом света, цветом и его насыщенностью. Мы пытались осуществить это несколькими способами. Однако гистограммы оказались самым эффективным способом спрогнозировать уровень освещения.
Нельзя не сказать, как занимателен процесс тестирования всей этой радости. И как обидно, когда у тебя дома всё работает “на ура”, а при демонстрации приложения знакомым — то в носу глаз определит, то ещё где похуже. Алгоритмы определённо нуждаются в постоянной оптимизации. Но если после месяца работы результаты пугали своей неточностью, то через год мы сами начали пользоваться своим приложением. В нем всё ещё много неожиданных багов, но на собственном опыте можно сказать, что в целом всё работает сносно. Иногда ты начинаешь щуриться из-за непривычной яркости, иногда, погруженный в работу, ты приближаешься к монитору и действительно не замечаешь этого. Вот тут-то Viewaide и подсказывает тебе невнимательному. Сейчас настал момент поделиться результатом нашей работы с IT-сообществом, с теми, кто чаще задумывается о возможном ухудшении зрения или о снижении работоспособности.
На данный момент доступна полноценная Windows-версия, а так же Beta-версия на Mac. В течение месяца мы планируем выпустить готовое приложение на Mac и Linux. И если хабрасообщество заинтересуется, то в свет выйдут 2 статьи о тонкостях портирования Qt приложения с Windows на Mac и Linux.
Мы будем признательны за любую критику. И если вы ещё не скачали Viewaide, то самое время это сделать.
A «haar cascade classifier» is an effective machine learning based approach for object detection. To train a haar cascade classifier for eye detection, the algorithm initially needs a lot of positive images (images of eyes) and negative images (images without eyes). Then the classifier is trained from these positive and negative images. It is then used to detect eyes in other images. We can use already trained haar cascades for eye detection.
For eye detection in the input image, we need two haar cascades one for face detection and other for eye detection. We will use the following two haar cascades −
-
haarcascade_frontalface_alt.xml
-
haarcascade_eye_tree_eyeglasses.xml
How to Download Haarcascades?
You can find different haarcascades following the GitHub website address −
https://github.com/opencv/opencv/tree/master/data/haarcascades
To download the haar cascade for eye detection click on the haarcascade_eye_tree_eyeglasses.xml file. Open it in raw format, right click and save.
Note − Save all haarcascade xml files in the haarcascades folder.
Steps
To detect eyes in an image and draw bounding boxes around them, you can follow the steps given below −
-
Import the required library. In all the following examples, the required Python library is OpenCV. Make sure you have already installed it.
-
Read the input image using cv2.imread() in a grayscale. Specify the full image path.
-
Initiate the Haar cascade classifier objects face_cascade = cv2.CascadeClassifier() for face detection and eye_cascade = cv2.CascadeClassifier for eyes detection. Pass the full path of the haar cascade xml files. You can use the haar cascade file haarcascade_frontalface_alt.xml to detect faces in the image and haarcascade_eye_tree_eyeglasses.xml to detect eyes.
-
Detect faces in the input image using face_cascade.detectMultiScale(). It returns the coordinates of detected faces in (x,y,w,h) format.
-
Define roi as image[y:y+h, x:x+w] for the detected face. Now detect eyes within the detected face area (roi). Use eye_cascade.detectMultiScale(). It also returns the coordinate of the bounding rectangle of eyes in (ex,ey,ew,eh) format.
-
Draw the bounding rectangles around the detected eyes in the original image using cv2.rectangle().
-
Display the image with the drawn bounding rectangles around the eyes.
Let’s have a look at some examples for more clear understanding.
Example
In this Python program, we detect eyes in the input image using a haar cascade.
import cv2 img = cv2.imread('woman.jpg') gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) face_cascade = cv2.CascadeClassifier('haarcascadeshaarcascade_frontalface_default.xml') eye_cascade = cv2.CascadeClassifier('haarcascadeshaarcascade_eye_tree_eyeglasses.xml') faces = face_cascade.detectMultiScale(gray, 1.3, 4) print('Number of detected faces:', len(faces)) for (x,y,w,h) in faces: roi_gray = gray[y:y+h, x:x+w] roi_color = img[y:y+h, x:x+w] eyes = eye_cascade.detectMultiScale(roi_gray) for (ex,ey,ew,eh) in eyes: cv2.rectangle(roi_color,(ex,ey),(ex+ew,ey+eh),(0,255,255),2) cv2.imshow('Eyes Detection',img) cv2.waitKey(0) cv2.destroyAllWindows()
Consider the following image as the Input File for this program −

When you run the above Python program, it will produce the following output window −
Number of detected faces: 1
And we get the following output window showing the detected eyes in the image —
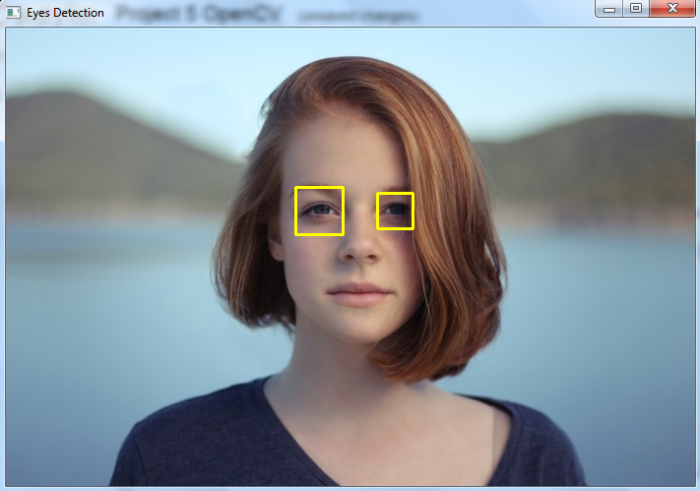
The bounding boxes around the detected eyes are drawn with yellow color.

Распознавание лиц — одна из задач, которую люди пытались решить с самого начала вычислительной эры. В настоящее время его можно найти где угодно, и наши лица, вероятно, сканируют несколько сотен раз в день.
В этой статье мы будем использовать каскадный классификатор на основе признаков Хаара. Сам алгоритм довольно старый, изобретен в 2001 году. Несмотря на свой возраст, алгоритм до сих пор используется благодаря своей удивительной скорости — его легко использовать в маломощных устройствах.
Подготовка
Прежде чем мы начнем, нам нужна хотя бы одна картинка для классификации. Вы можете выбрать его из своей личной коллекции или найти что-то в Интернете. Пожалуйста, имейте в виду, что классификатор, который мы используем, очень прост, поэтому у него могут быть проблемы с обнаружением всех типов лиц. Если ваша программа не определяет лицо, попробуйте изменить тестовое изображение. В моем случае у классификатора были трудности с поиском людей в очках. Это также не работает для повернутых лиц. Это можно исправить, обучив собственный классификатор, но этот процесс выходит далеко за рамки темы следующей статьи.
Для классификации нам также нужен предварительно обученный классификатор в файле XML. Я использую классификаторы в комплекте с самим OpenCV, я нашел haarcascade_frontalface_alt2 наиболее надежным. Вы можете найти это здесь». В будущем мы будем использовать другие предварительно обученные классификаторы из этого репозитория.
Распознавание лиц
Для начала нам нужно загрузить изображение. Изображения, которые я использовал, были довольно большими, поэтому я дополнительно изменил их размер. Вы можете пропустить это, если ваши изображения меньше. Преобразование изображения в оттенки серого необходимо, поскольку классификаторы работают только в оттенках серого.
orgimg = cv2.imread('img/test1.jpg')
img = cv2.resize(orgimg, (0,0), fx=0.2, fy=0.2)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
Теперь мы можем загрузить и использовать наш детектор:
face_cascade = cv2.CascadeClassifier('classifiers/haarcascade_frontalface_alt2.xml')
faces = face_cascade.detectMultiScale(gray, 1.3, 5)
После запуска этого кода мы получим все координаты лиц в массиве faces.
Вам может быть интересно, что это за магические числа, которые передаются методу detectMultiScale. Это в основном параметры для тонкой настройки алгоритма:
- scaleFactor — параметр, указывающий, насколько уменьшается размер изображения при каждом масштабе изображения.
- minNeighbors — параметр, указывающий, сколько соседей должен иметь каждый прямоугольник-кандидат, чтобы сохранить его.
Теперь мы можем пройтись по списку лиц:
for (x,y,w,h) in faces:
cv2.rectangle(img, (x,y), (x+w, y+h), (255,0,0), 2)
Для каждого обнаруженного нами лица мы рисуем прямоугольник в том месте, где оно было найдено. Обратите внимание, что мы рисуем поверх исходного (цветного) изображения, а не поверх серого, который мы передали классификатору. Делая это, мы можем классифицировать уменьшенное изображение, но по-прежнему показывать результат на полной цветной версии.
Последнее, что нам нужно сделать, это показать результат. Мы можем сделать это, используя самый распространенный и простой способ отображения изображений в OpenCV:
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
Полный код на данный момент
import cv2
orgimg = cv2.imread('img/test1.jpg')
img = cv2.resize(orgimg, (0,0), fx=0.2, fy=0.2)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
face_cascade = cv2.CascadeClassifier('classifiers/haarcascade_frontalface_alt2.xml')
faces = face_cascade.detectMultiScale(gray, 1.3, 5)
for (x,y,w,h) in faces:
cv2.rectangle(img, (x,y), (x+w, y+h), (255,0,0), 2)
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
Результат

Рисование кругов
Результат вполне удовлетворительный, но большинство граней круглые. Почему бы нам не нарисовать круг вместо прямоугольника, чтобы отметить их:
center = (x+w//2, y+h//2) radius = (w+h)//4 cv2.circle(img, center, radius, (255, 0, 0), 2)
Вместо использования cv2.rectangle мы используем метод cv2.circle. Радиус — это среднее значение ширины и высоты, деленное на два. Поскольку наш классификатор всегда возвращает квадрат, мы могли бы просто использовать w//2 или h//2 напрямую, но это решение позволит нам использовать разные классификаторы, не меняя часть рисунка (мы могли бы нарисовать многоточие, но в случае граней разница между двумя радиусами должна быть меньше). быть таким большим).
Результат

Обнаружение глаз
Следующее, что мы можем сделать, это обнаружить глаза. В данных OpenCV для этого есть файл haarcascade_eye.xml с предварительно обученным классификатором. Вместо того, чтобы вызывать его на нашем полном изображении, мы можем искать только глаза на лицах. Кроме того, при этом у нас будет ссылка на то, сколько глаз мы нашли на одном лице, поэтому мы можем, например, отбросить все лица, на которых люди закрыли глаза (или сделать постапокалиптический детектор лиц, который не даст доступ для любых мутантов).
face_cascade = cv2.CascadeClassifier('classifiers/haarcascade_frontalface_alt2.xml')
eye_cascade = cv2.CascadeClassifier('classifiers/haarcascade_eye.xml')
faces = face_cascade.detectMultiScale(gray, 1.2, 3)
for (x,y,w,h) in faces:
center = (x+w//2, y+h//2)
radius = (w+h)//4
face_color = img[y:y+h, x:x+w]
face_gray = img[y:y+h, x:x+w]
eyes = eye_cascade.detectMultiScale(face_gray, 1.2, 3)
if (len(eyes) != 2):
break
cv2.circle(img, center, radius, (255, 0, 0), 2)
for (ex, ey, ew, eh) in eyes:
eye_center = (ex+ew//2, ey+eh//2)
eye_radius = (ew+eh)//4
cv2.circle(face_color, eye_center, eye_radius, (128, 128, 0), 2)
Код по-прежнему довольно прост. Для каждого лица мы извлекаем его область из изображения (обратите внимание, что мы берем y в качестве первого аргумента, x в качестве второго — img — это пустой ndarray). Срезы не копируются, они по-прежнему ссылаются на исходную память, поэтому мы можем легко рисовать на них, а также будет обновляться основная картинка. Мы отбрасываем все лица, на которых нет 2 глаз.
Полный код
import cv2
orgimg = cv2.imread('img/test1.jpg')
img = cv2.resize(orgimg, (0,0), fx=0.2, fy=0.2)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
face_cascade = cv2.CascadeClassifier('classifiers/haarcascade_frontalface_alt2.xml')
eye_cascade = cv2.CascadeClassifier('classifiers/haarcascade_eye.xml')
faces = face_cascade.detectMultiScale(gray, 1.2, 3)
for (x,y,w,h) in faces:
center = (x+w//2, y+h//2)
radius = (w+h)//4
face_color = img[y:y+h, x:x+w]
face_gray = img[y:y+h, x:x+w]
eyes = eye_cascade.detectMultiScale(face_gray, 1.2, 3)
if (len(eyes) != 2):
break
cv2.circle(img, center, radius, (255, 0, 0), 2)
for (ex, ey, ew, eh) in eyes:
eye_center = (ex+ew//2, ey+eh//2)
eye_radius = (ew+eh)//4
cv2.circle(face_color, eye_center, eye_radius, (128, 128, 0), 2)
cv2.imshow('img', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
Результат

использованная литература
Статья в стиле Харра в Википедии
Изображение, использованное для тестов с Unsplash
Документальная статья из OpenCV
Фото на обложке Даниил Авилов на Unsplash
Первоначально опубликовано на странице http://heapster.net/blog/detecting-faces-in-opencv-python/ 3 декабря 2017 г.
Задача очень нетривиальна и, предваряя поиск решения, требует конкретизации условий, в которых необходимо производить детекцию моргания или просто текущего состояния глаз в кадре: открыты или закрыты.
Возьмём, к примеру, стандартный случай.
Если на исходном изображении лицо не заполняет всю видимую область, то таковую необходимо локализовать. Для решения этой задачи существует не так уж и много решений, но то, что имеется в подавляющем количестве случаев более чем удобоваримо. Речь прежде всего о каскаде Хаара. Во многих фреймворках, так или иначе касающихся тематики компьютерного зрения, имеется реализация данного инструмента, позволяющая с относительно высокой точностью локализовать местоположение лица в кадре.
После нахождения региона, содержащего лицо, уже в нём необходимо локализовать местоположение обоих глаз. Как правило, начав с каскада Хаара в случае с лицом, не останавливаются в использовании этого же инструмента и для глаз. Просто берут соответствующий файл классификатора, заранее обученный на поиск желаемого типа объекта. К слову сказать, оба типа классификаторов (для лиц, глаз, да и других объектов) имеются во многим известном фреймворке OpenCV, ориентированном как раз на решение задач, навроде той, что встала перед автором вопроса.
Не стану останавливаться на задаче, как реализовать детекторы лиц и глаз посредством каскада Хаара (метод Виолы-Джонса) в том же OpenCV, так как об этом расписано в сети, наверное, вдоль и поперёк, да и вопрос конкретно не затрагивает эту область.
Предположим, что после применения алгоритмов детекции мы получили следующие изображения, отражающие два состояния глаз: открыты и закрыты.

Изображения мною взяты исключительно для примера, но в реальности, если съёмка ведётся с обычной вебкамеры, области глаз получаются значительно меньше. Это просто в следствие того, что специально подносить собственную физиономию близко к объективу редко у кого возникает желание. Но именно в следствие этого (условий съёмки, упоминаемых мною в самом начале) как правило и начинаются расхождения в подходах к определению местоположения зрачка.
Методов по детекции зрачка разработано довольно много. От самых простых, до комплексных. Очень многие подробно расписаны (к сожалению в подавляющем большинстве случаев на английском). А для некоторых имеется и вполне свободный доступ к исходникам. На том же гитхабе можно обнаружить довольно много различных решений. Например такое или такое. Последнее, кстати, не требует локализации области глаз, только лишь лица.
Вообще, детекция зрачка кажется очевидным путём для решения поставленной задачи: зрачок есть — глаз открыт, нет зрачка — глаз закрыт. Но у многих методов, идущих этим путём, имеется проблема с детекцией в том случае, если глаз полуприкрыт или закрыт вовсе. В этом случае происходят ложные срабатывания алгоритмов и те выдают местоположение зрачка аккурат на ресницах, «лежащих» на соединении верхнего и нижнего века. То есть, искомое состояние о закрытии глаза способны выдавать далеко не все методы.
Для решения этой проблемы можно использовать машинное обучение или даже предварительно сделать образцы открытого и закрытого глаз, а затем сравнивать с этими шаблонами новые кадры. Но можно пойти и от обратного, например, применив самый простой детектор кожи. Очевидно, что если глаз закрыт, цветом кожи будет покрыто практически всё изображение глаза, а если открыт, то далеко не всё.
int main() {
// Загрузить изображения открытого и закрытого глаз из файлов.
cv::Mat eye_opened_mat = cv::imread("eye-opened.jpg");
cv::Mat eye_closed_mat = cv::imread("eye-closed.jpg");
// Показать, что загрузили в отдельных окошках.
cv::imshow("eye-opened", eye_opened_mat);
cv::imshow("eye-closed", eye_closed_mat);
// Сконвертировать цветовое пространство изображений в YCbCr.
cv::Mat opened_mat, closed_mat;
cv::cvtColor(eye_opened_mat, opened_mat, cv::COLOR_BGR2YCrCb);
cv::cvtColor(eye_closed_mat, closed_mat, cv::COLOR_BGR2YCrCb);
// Изъять из картинок указанные диапазоны значений пикселей
// для каждого из цветовых каналов YCbCr.
cv::inRange(opened_mat, cv::Scalar(0,133,77), cv::Scalar(255,173,127), opened_mat);
cv::inRange(closed_mat, cv::Scalar(0,133,77), cv::Scalar(255,173,127), closed_mat);
// Показать результат в отдельных окошках.
cv::imshow("grd-opened", opened_mat);
cv::imshow("grd-closed", closed_mat);
cv::waitKey();
return 0;
}
Этот код использует OpenCV. Результат будет следующий:

Разница между закрытым и открытым глазами очевидна и не составит никакого труда алгоритму выдать правильный ответ о состоянии глаза. Преимуществом данного подхода является скорость. Работает он очень быстро. Недостаток: чувствительность к перепадам освещённости, ну и конечно к неграм (без обид), для цвета кожи которых придётся подбирать иные коэффициэнты.
Отправьте статью сегодня! Журнал выйдет 10 июня, печатный экземпляр отправим 14 июня.
Опубликовать статью в журнале
Библиографическое описание:
Трекин, А. Н. Метод проекций яркости при поиске зрачка на изображении / А. Н. Трекин, И. А. Матвеев. — Текст : непосредственный // Технические науки: теория и практика : материалы I Междунар. науч. конф. (г. Чита, апрель 2012 г.). — Чита : Издательство Молодой ученый, 2012. — С. 24-28. — URL: https://moluch.ru/conf/tech/archive/7/2227/ (дата обращения: 30.05.2023).
- Предлагается метод быстрого определения на изображении глаза
точки, лежащей внутри зрачка, которая может далее использоваться как
его приближённый центр. Используются проекции яркости
бинаризованного изображения на вертикальную и горизонтальную оси.
Произведена экспериментальная проверка на доступных базах
изображений радужки. - Ключевые слова: сегментация изображений,
распознавание радужки, проекция яркости
Введение
- Идентификация личности человека по изображению радужной оболочки
— один из развивающихся методов биометрии, уже имеющий применение в
системах доступа. Он основан на том, что рисунок радужной оболочки
глаза имеет индивидуальную, слабо меняющуюся со временем структуру.
Одним из этапов распознавания радужной оболочки является выделение
зрачка на изображении глаза. Это необходимо, чтобы локализовать
радужную оболочку, которую затем сравнивают с эталоном. -

-
Рис 1. Исходное изображение глаза, база CASIA, 640*480, 256 градаций
серого. -
Зрачок большинства людей имеет форму, близкую к кругу [14], и
отражает очень мало света, если направление освещения не совпадает с
направлением камеры. Это позволяет искать его как тёмный круг на
изображении. Наиболее часто используемым является метод Даугмана
[1]. На нём основано большинство разработанных коммерческих
приложений. Поиск трёх параметров положения окружности (две
координаты центра и радиус) осуществляется при помощи следующего
интегро-дифференциального оператора: -

-
где
 –
–
яркость изображения. - Оператор ищет область на изображении, где достигается максимум
частной производной от нормализованного интеграла по

по направлению увеличения величины радиуса. Многие методы основаны
на работе с градиентом яркости и различными вариантами
преобразования Хафа. В таких методах сначала производится
градиентное преобразование изображения, то есть приближенное
вычисление частных производных яркости изображения в каждой точке.
Так как зрачок сильно отличается от окружающей его радужки по
яркости, на его границе — окружности — значения градиента принимают
большие значения. Затем необходимо найти параметры этой окружности,
для чего применяют преобразование Хафа [9], позволяющее найти
параметры кривых заданного типа, в данном случае — окружностей.
Таковы методы, используемые в [2], [3]. В [4] для ускорения также
используется предварительная бинаризация изображения. -
Нашей целью было создание алгоритма, предлагающего оценку координат
центра зрачка, причём основной идеей было сократить время работы
программы за счёт точности определения центра, по сути, мы
претендуем лишь на то, что обнаружили точку, лежащую внутри зрачка.
Для ускорения работы, в основном, используется уменьшение объёма
данных, с которыми работает алгоритм, а именно — переход от
исследования двумерного массива
 изображения,
изображения,
к исследованию одномерных массивов — «проекций» зрачка
на координатные оси. Полученный результат может быть использован для
уменьшения зоны поиска зрачка другим, более точным и менее быстрым
методом, что может уменьшить суммарное время. Также результат можно
использовать в алгоритмах, которые ищут параметры зрачка, используя
точку, лежащую не далее, чем половина радиуса от истинного центра
зрачка, например [6]. В работе [7] также применяются проекции,
которые строятся как сумма яркостей всех точек с данной координатой
по одной из осей. Для нахождения глаза на фотографии лица человека
использовался тот факт, что проекции испытывают большие изменения в
районе глаз. В работе [8] используется горизонтальная проекция
бинаризованного изображения для грубого определения расположения
глаза.

Описание алгоритма
- Алгоритм состоит из следующих шагов.
- Бинаризация изображения с плавающим порогом.
- Проекции на координатные оси
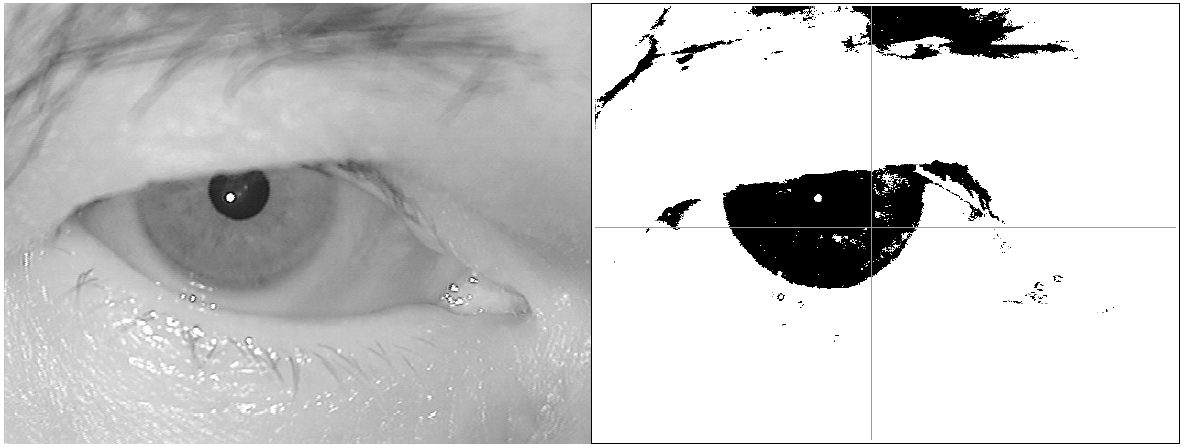
- Поиск координат центра зрачка
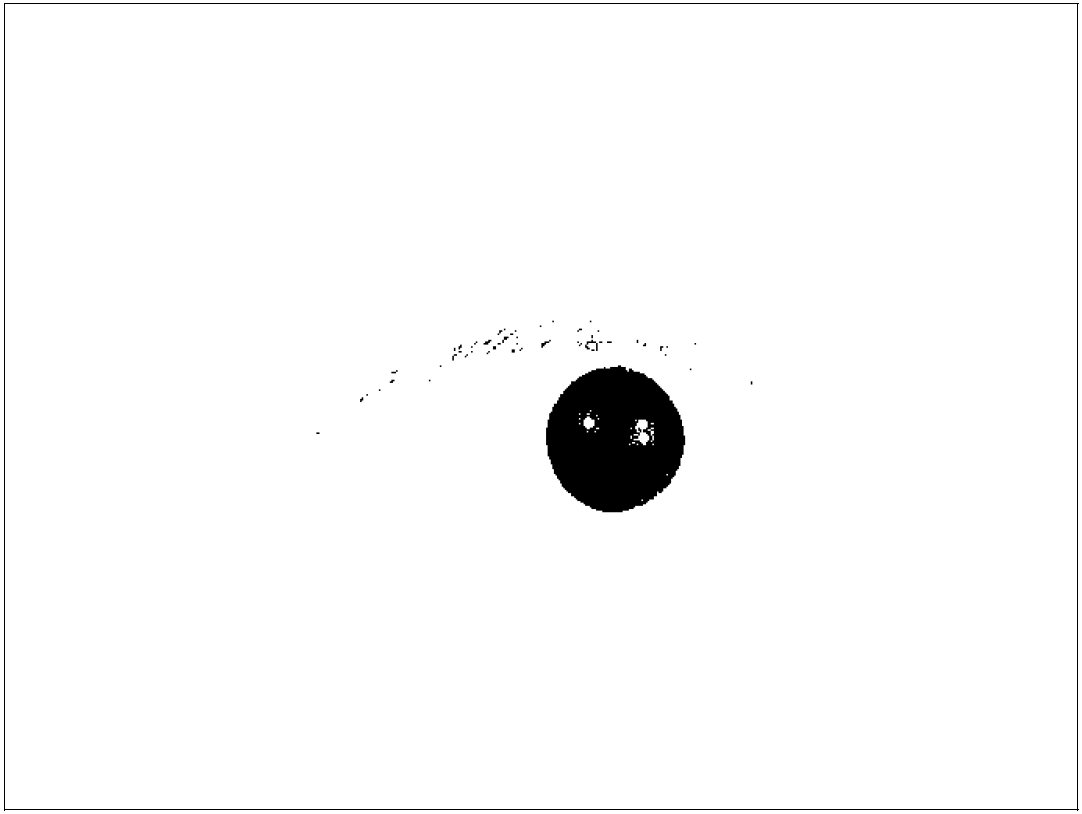
Шаг 1.Бинаризация
- Бинаризация — получение бинарного изображения из
изображения с 256 градациями серого. В данном случае используется
простая пороговая функция: -

-
где

— яркости точки исходного и бинаризованного изображений
соответственно,

— некий порог, который подбирается в с помощью исследования
гистограммы изображения.Предполагается, что зрачок, как крупная по
площади область с небольшой и практически равномерной яркостью, даст
первый достаточно резкий и высокий максимум на гистограмме. Этот
максимум ищется как первая точка, отвечающая условиям: -
1)

— условие локального максимума, -
2)
 —
—
условие достаточной высоты, -
3)
 ;
;
—
условие резкости максимума. - где

— эмпирически подбираемые параметры ( —
—
окно,

— порог,

— перепад). Подобное преобразование используется в [4] и в [5] — с
фиксированным порогом. 
-
Рис.2. Гистограмма изображения, первый резкий максимум показан
стрелкой. 
- Рис.3.Бинаризованное изображение.

Шаг 2. Проецирование на ось X.
- Проецированием мы называем процедуру получения из бинарного
изображения распределения количества точек с яркостью 1 в
зависимости от координаты. В работе [7] также применяются проекции,
но там проецируется само исходное изображение. Проекция —
одномерный массив — получается из изображения по следующей
формуле: -

-
Предположение: максимум

располагается на координате, соответствующей центру зрачка.
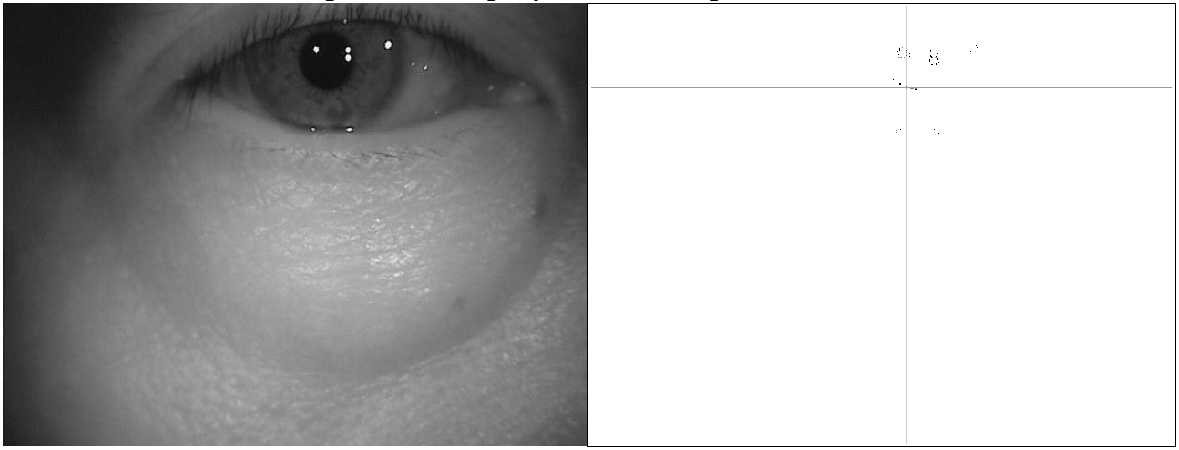
Шаг 3. Поиск Y-координаты центра зрачка.
- Для поиска
 -координаты
-координаты
этот метод оказался ненадёжным, так как зачастую максимум проекции
на ось

доставляет не зрачок, а бровь или ресницы. Поэтому оценкой для
координаты центра зрачка положим середину пересечения прямой

с тёмной областью на бинаризованном изображении. Основанием для
подобной оценки является то, что если максимум проекции на ось

достигается в середине зрачка, то середина этого пересечения будет
расположена внутри зрачка.
Экспериментальная проверка
- Проверка работы алгоритма производилась на открытых базах
фотографий человеческих глаз:UBIRIS.v1
[10], CASIA—IrisV3
[15], ND—IRIS
[12], BATH [16]. Истинные параметры зрачка
на каждом изображении, проставленные экспертом, известны, с ними и
сравнивается полученный результат. В таблицах 1-3 приведена
статистика работы алгоритма. Для удобства восприятия выделены
количества изображений, на которых разница между полученным и
истинным значением меньше, чем десятая часть истинного радиуса
зрачка; меньше половины радиуса зрачка; меньше радиуса зрачка.
Таблица 1
Статистика
пересечений вертикальной прямой x=x0
со зрачком
|
Название базы |
Всего изображений |
Количество пересечений в 10% от |
Количество пересечений в |
Количество пересечений со зрачком |
|
ND-IRIS |
64979 |
22430 |
62726 |
64701 |
|
BATH |
13177 |
1486 |
12832 |
13081 |
|
CASIA |
16180 |
8889 |
16058 |
16173 |
|
Всего |
95513 |
40217 |
85577 |
93955 |
Таблица 2
Статистика
пересечений вертикальной прямой y=y0
со зрачком.
|
Название базы |
Всего изображений |
Количество пересечений в |
Количество пересечений в |
Количество пересечений со зрачком |
|
ND-IRIS |
64979 |
44714 |
64500 |
64875 |
|
BATH |
13177 |
12164 |
13056 |
13093 |
|
CASIA |
16180 |
13506 |
16121 |
16170 |
|
Всего |
95513 |
71398 |
94842 |
95296 |
- Этот метод показывает даже более высокую точность, чем
определение
 -координаты
-координаты
зрачка.
Таблица 3
Статистика
точности определения центра зрачка
|
Название базы |
Всего изображений |
Количество пересечений в |
Количество пересечений в |
Количество пересечений со зрачком |
|
ND-IRIS |
64979 |
15092 |
61751 |
64481 |
|
BATH |
13177 |
1314 |
12686 |
13059 |
|
CASIA |
16180 |
7225 |
15986 |
16164 |
|
Всего |
95513 |
23727 |
91525 |
94864 |
- Средняя по всем базам фотографий точность попадания результата:
расстояние от истинного центра менее 10% от радиуса зрачка — 24,8%,
менее 50% радиуса зрачка — 95,8%, менее радиуса зрачка — 99,3%. -
Оценка сложности алгоритма. Оценка сложности при размерах
изображения ,
,
глубине цвета .
. -
Гистограмма:
операций
сложения. -
Поиск максимума гистограммы:
 операций
операций
сравнения. -
Бинаризация:
операций сравнения и присваивания. -
Проекция на ось
:
операций сложения. -
Поиск максимума по
:
операций сравнения. -
Поиск
-координаты:

операций сравнения и инкремента. -
Итого, если считать каждую операцию занимающей единицу
вычислительного ресурса, то выходит
 .
.
В нашем случае это около

операций. Для сравнения, методы основанные на преобразовании Хафа
или методе Даугмана, имеют минимальную сложность порядка
 ,
,
что даёт сложность порядка. -
Анализ результатов. Метод показывает достаточно хорошую в
большинстве случаев точность попадания внутрь зрачка, средняя по
всем базам изображений (доля ошибок, то есть попаданий найденной
точки за пределы зрачка, составляет 0,13%, а также небольшую
сложность. При этом он не использует градиентного преобразования,
поэтому качество результата нечувствительно к четкости изображения,
но падает при плохой освещенности, когда тени на лице становятся
такими же темными, как зрачок.Возникающие ошибки обычно связаны с
неудачной бинаризацией, когда либо зрачок оказывается слишком
светлым, как на Рис.4, или наоборот, в темную область включается
значительная площадь ресниц или радужки, как на Рис.5. 
- Рис.4.Пример некорректной обработки изображения.

- Рис.5.Пример некорректной обработки изображения.
- В дальнейшем необходимо изучить возможность улучшения частоты
попадания внутрь зрачка, а еще лучше — в 50% радиуса зрачка. Это
позволит использовать результат для дальнейшего уточнения параметров
зрачка. Также нужно построить критерии оценки результата,
позволяющие отбраковывать заведомо неверные варианты, предлагаемые
алгоритмом.
Литература:
-
[1] Daugman J. http://www.cl.cam.ac.uk/ jgd1000/
-
[2] Xu L., Oja E., Kultanan P. A new curve detection method:
Randomized Hough transform (RHT). // Pattern Recog. Lett. 1990. N11.
P.331-338. -
[3] Rad A.A., Faez K., Qaragozlou N. Fast Circle Detection Using
Gradient Pair Vectors. // Proc. 7th Digital Image Computing:
Techniques and Applications. 2003. P.879-887. -
[4] Boyd M., Carmaciu D., Giannaros F., et al MSc Computing Science
Group Project Iris Recognition. // Imperial College, London. 2010. -
[5] Dey S., Samanta D. A Novel Approach to Iris Localization for
Iris Biometric Processing. // Int. J. Biological and Life Sciences.
2007. N3. V.3. -
[6] Матвеев И.А., Ганькин К.А. Распознавание человека по радужке //
Системы безопасности. 2004. N.5. P.72-76. -
[7] Zhou Z.-H., Geng X. Projection functions for eye detection. //
State Key Laboratory for Novel Software Technology, Nanjing
University. 2002. -
[8] Moravcik T. An Approach to Iris and Pupil Detection in Eye
Image. // University of Zilina. 2010. -
[9] Гонсалес Р., Вудс Р. Цифровая обработка изображений //
М.:Техносфера. 2005. 1072 с. -
[10] Proenca H., Alexandre L. UBIRIS: A noisy iris image database.
// 13th Int. Conf. Image Analysis and Processing. P.970-977.
Cagliari, Italy. Springer. -
[11] ISO/IEC 19794-6 Information technology — Biometric data
interchange formats — -
Part 6: Iris image data.
-
[12] Phillips P., Scruggs W., O’Toole A. et al
Frvt2006 and ice2006 large-scale experimental results. IEEE PAMI.
2010. N.32. V.5. P.831-846. -
[13] Матвеев И.А. Метод поиска окружности с известной внутренней
точкой на изображении. // Труды ИСА РАН. Динамика неоднородных
систем. 2007. №31. Т.1. С.288-293. -
[14] Бирич Т.А., Марченко Л.Н., Чекина А.Ю. Офтальмология. // Минск.
Вышэйшая школа. 2007.
576 с. -
[15] Chinese Academy of Sciences Institute of Automation. Iris image
database, version 3. (2005) Available from
http://www.cbsr.ia.ac.cn/IrisDatabase.htm -
[16] University of Bath. Iris Image Database. (2005) Available from
http://www.bath.ac.uk/elec-eng/research/sipg/irisweb/
Основные термины (генерируются автоматически): BATH, CASIA, ND-IRIS, зрачок, изображение, радиус зрачка, операция сравнения, пересечение, радужная оболочка, темная область.
Похожие статьи
Методы определения объектов на изображении
При использовании данного алгоритма для каждого пикселя изображения рассматривается круговой регион фиксированного радиуса.
По итогам сравнения пиксели региона разделяются на две категории: интенсивность которых близка к интенсивности ядра (область с…
Кластеризация эталонов радужки как метод оптимизации поиска…
1.получение изображения; 2.определение границ объектов (зрачка и радужки)
Основные термины (генерируются автоматически): класс, эталон, время поиска, кластер, баз, BATH, расстояние, CASIA, соответствующий эталон, сравнение.
Исследование и применение eye-tracking технологии на человеке
Дрейф — это постепенное снижение точности данных eye-tracker по сравнению с истинным положением глаз.
Метод проекций яркости при поиске зрачка на изображении.
Так как зрачок сильно отличается от окружающей его радужки по яркости, на его границе.
Сравнительный анализ прямой и содружественной реакций…
Однако при патологических состояниях зрачки могут становиться овальными, фестончатыми, эксцентрично расположенными (ирит, частичное отсутствие или атрофия радужной оболочки). Кроме того, овально-горизонтальная форма зрачков указывает на недостаточное…
Береги зрение смолоду
В центре глаза, позади радужной оболочки и зрачка, расположена овальная линза – хрусталик. Для того чтобы сформировать изображение
С наступлением сумерек колбочки сменяют палочки, поэтому в темной комнате можно различать предметы, но нельзя определить цвета.
Распознавание световых пятен лазера на изображении
Метод проекций яркости при поиске зрачка на изображении. Бинаризация: операций сравнения и присваивания. Проекция на ось : операций сложения. Распознавание световых пятен лазера на изображении.
Анализ методов и систем регистрации окуломоторной активности
Распознавание объекта (радужки или зрачка) в видеопотоке не даёт достаточно информации для определения направления взгляда, важно следить за объектом, совмещая при этом определение точки пересечения оптической оси глазного яблока и плоскости экрана…
Исследование механизмов защиты цифровой видеоинформации…
Метод проекций яркости при поиске зрачка на изображении. Ключевые слова: сегментация изображений, распознавание радужки, проекция яркости. Рис 1. Исходное изображение глаза, база CASIA, 640*480, 256 градаций серого.
Методы распознавания образов | Статья в журнале…
Такое упрощение конечно, не позволяет более широкого диапазона операций, таких как анализ, однако
Когда присутствуют одновременно, как маленькие объекты, так и большие, то анализ изображения в разных разрешениях позволит значительно расширить области обработки.
- Как издать спецвыпуск?
- Правила оформления статей
- Оплата и скидки
Похожие статьи
Методы определения объектов на изображении
При использовании данного алгоритма для каждого пикселя изображения рассматривается круговой регион фиксированного радиуса.
По итогам сравнения пиксели региона разделяются на две категории: интенсивность которых близка к интенсивности ядра (область с…
Кластеризация эталонов радужки как метод оптимизации поиска…
1.получение изображения; 2.определение границ объектов (зрачка и радужки)
Основные термины (генерируются автоматически): класс, эталон, время поиска, кластер, баз, BATH, расстояние, CASIA, соответствующий эталон, сравнение.
Исследование и применение eye-tracking технологии на человеке
Дрейф — это постепенное снижение точности данных eye-tracker по сравнению с истинным положением глаз.
Метод проекций яркости при поиске зрачка на изображении.
Так как зрачок сильно отличается от окружающей его радужки по яркости, на его границе.
Сравнительный анализ прямой и содружественной реакций…
Однако при патологических состояниях зрачки могут становиться овальными, фестончатыми, эксцентрично расположенными (ирит, частичное отсутствие или атрофия радужной оболочки). Кроме того, овально-горизонтальная форма зрачков указывает на недостаточное…
Береги зрение смолоду
В центре глаза, позади радужной оболочки и зрачка, расположена овальная линза – хрусталик. Для того чтобы сформировать изображение
С наступлением сумерек колбочки сменяют палочки, поэтому в темной комнате можно различать предметы, но нельзя определить цвета.
Распознавание световых пятен лазера на изображении
Метод проекций яркости при поиске зрачка на изображении. Бинаризация: операций сравнения и присваивания. Проекция на ось : операций сложения. Распознавание световых пятен лазера на изображении.
Анализ методов и систем регистрации окуломоторной активности
Распознавание объекта (радужки или зрачка) в видеопотоке не даёт достаточно информации для определения направления взгляда, важно следить за объектом, совмещая при этом определение точки пересечения оптической оси глазного яблока и плоскости экрана…
Исследование механизмов защиты цифровой видеоинформации…
Метод проекций яркости при поиске зрачка на изображении. Ключевые слова: сегментация изображений, распознавание радужки, проекция яркости. Рис 1. Исходное изображение глаза, база CASIA, 640*480, 256 градаций серого.
Методы распознавания образов | Статья в журнале…
Такое упрощение конечно, не позволяет более широкого диапазона операций, таких как анализ, однако
Когда присутствуют одновременно, как маленькие объекты, так и большие, то анализ изображения в разных разрешениях позволит значительно расширить области обработки.