
В этой главе …
- Изучаем закон Гука
- Осваиваем основы простого гармонического движения
- Изучаем особенности простого гармонического движения
- Измеряем энергию простого гармонического движения
- Вычисляем период колебаний маятника
Эта глава посвящена описанию еще одного типа движения, а именно: описанию периодического движения. Примерами такого движения являются колебания грузика на пружинке, качания маятника и даже прыжки с высоты с помощью эластичной веревки. В этой главе рассматриваются закономерности и особенности таких повторяющихся, т.е. периодических движений. Здесь мы научимся вычислять характеристики периодического движения: период колебаний пружинки и маятника, упругую энергию сжатой пружины и т.д.
Содержание
- Постигаем закон Гука
- Растягиваем и сжимаем пружины
- Изучаем особенности закона Гука
- Движется дальше: простое гармоническое движение
- Изучаем простое гармоническое движение по горизонтали и по вертикали
- Изучаем свойства простого гармонического движения
- Изучаем траекторию простого гармонического движения
- Определяем период простого гармонического движения
- Определяем скорость в простом гармоническом движении
- Определяем ускорение в простом гармоническом движении
- Определяем частоту колебаний груза на пружине
- Вычисляем энергию простого гармонического движения
- Качаемся вместе с маятником
Постигаем закон Гука
Все объекты природы могут деформироваться, т.е. менять свою форму или объем, под действием приложенной силы. Если такие деформации (т.е. изменения) исчезают после прекращения действия приложенной силы, то они называются упругими. Упругость играет важную роль в технике. Упругие пружины используются для гашения удара при посадке космического корабля на поверхность планеты. Свернутые в спираль упругие пластины применяются в заводных механизмах часов. Даже в мышеловке используется упругая деформация пружины.
Еще в XVII-M веке английский физик Роберт Гук, изучая упругие свойства разных материалов, вывел закон, названный его именем. Согласно закону Гука, для упругого деформирования материала требуется приложить силу, величина которой прямо пропорциональна его деформации. Например, чтобы растянуть пружину на величину ( x ), потребуется приложить внешнюю силу ( F_{вн} ), которая равна:

где ( k ) — это коэффициент пропорциональности.
Точнее говоря, вектор деформации ( mathbf{x} ) всегда направлен противоположно силе сопротивления пружины (или силе упругости) ( mathbf{F} ), а потому в векторную формулировку закона Гука обычно входит знак “минус”:

Растягиваем и сжимаем пружины
Следует помнить, что закон Гука относится только к упруго деформируемым материалам.
В реальном мире, помимо упругих деформаций, имеются еще и пластические деформации. Так называют деформации, которые остаются в объекте, хотя бы частично, даже после прекращения действия внешних сил. Если сила не превосходит некоторой известной величины, которая называется пределом упругости, то возникающая деформация будет пластической. Предел упругости имеет разные значения для разных материалов. Если деформируемый объект, например пружина, испытывает только упругие деформации, то его называют идеально упругим, например, идеально упругой пружиной. Коэффициент пропорциональности ( k ) в законе Гука ( F=kx ) называется коэффициентом упругости объекта, который зависит от материала объекта, его размеров и измеряется в Н/м.
Допустим, вам нужно спроектировать подвеску автомобиля массой 1000 кг, состоящую из 4 пружин, которые могут идеально упруго деформироваться на расстояние 0,5 м. Каким коэффициентом упругости должна обладать пружина, чтобы выдержать вес автомобиля?
Вес автомобиля равен ( mg ), где ( g ) — это ускорение свободного падения под действием силы гравитационного притяжения. Это значит, что на каждую пружину приходится вчетверо меньшая нагрузка ( mg/4 ).
Определим упругую деформацию пружины под действием этой нагрузки по формуле закона Гука:

т.е. коэффициент упругости равен:

Подставляя значения, получим:

Итак, чтобы выдержать вес автомобиля, потребуется пружина с коэффициентом упругости равным 4,9·103 Н/м. Не забудьте, что каждый элемент подвески автомобиля должен обладать определенным запасом прочности, чтобы выдерживать непредсказуемые превышения нагрузки, например на ухабах. Однако эта задача выходит за рамки данного курса.
Изучаем особенности закона Гука
Как уже упоминалось выше, в векторную формулировку закона Гука обычно входит знак “минус”:

Таким образом, знак “минус” выражает следующую особенность упругой деформации: сила упругости всегда противоположна деформации. На рис. 12.1 схематически показаны направления силы упругости и деформации при сжатии и растяжении пружины.
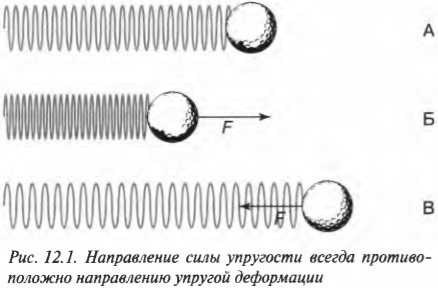
Как видите, при отсутствии растяжении или сжатия нет и деформации (см. схему А на рис. 12.1). Если пружина сжимается влево, то сила упругости направлена вправо (см. схему Б на рис. 12.1), а если пружина растягивается вправо, то сила упругости направлена влево (см. схему В на рис. 12.1).
Сила упругости пружины не зря называется силой сопротивления, ведь она стремится установить равновесие.
Движется дальше: простое гармоническое движение
Простым гармоническим движением называется такое движение, при котором сила сопротивления движению пропорциональна перемещению. При этом сила трения не учитывается, и никакие другие внешние силы не оказывают никакого влияния на движение. Такое движение будет выполняться периодически и бесконечно долго. Конечно же, в реальной ситуации так не бывает, но здесь имеется в виду именно идеализированная ситуация.
Изучаем простое гармоническое движение по горизонтали и по вертикали
На рис. 12.1 показан пример движения мячика, прикрепленного к пружине. При сжатии пружины внешней силой справа налево в пружине возникает сила упругости, которая стремится вернуть мячик в исходное положение. После возврата мячика в исходное положение он останавливается не сразу, а спустя какое-то время. Оно необходимо для торможения ускорившегося мячика с помощью силы упругости, возникающей при растягивании вправо. Дело в том, что мячик обладает некоторой массой, и инерция (см. главу 11) не позволяет ему остановиться мгновенно. В результате имеем следующую последовательность событий (см. рис. 12.1).
- Схема А. Мячик находится в состоянии равновесия. Никакие силы не действуют на него. Пружина находится в нерастянутом и в несжатом состоянии.
- Схема Б. Внешняя сила сжала пружину справа налево. В пружине возникла упругая сила сопротивления ( F ).
- Схема В. Внешняя сила отпускает пружину (и далее не участвует в процессе движения). Упругая сила сопротивления пружины ( F ) стремится распрямить пружину, т.е. вернуть мячик в исходное состояние. Мячик начинает ускоренное движение.
Когда мячик проходит точку исходного положения, его скорость становится очень большой (фактически максимальной) и он продолжает движение вправо. При этом возникает деформация растяжения и соответственно направленная противоположно упругая сила сопротивления пружины. Именно так и происходит при повторяющихся движениях мячика слева направо и, наоборот, справа налево. После первоначального толчка из неподвижного состояния мячик начинает совершать периодические колебания из самого крайнего левого положения в самое крайнее правое положение.
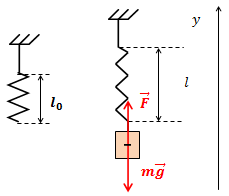
В примере на рис. 12.1 предполагается, что силы трения нет. А что будет, если пружинку с мячиком подвесить вертикально, как показано на рис. 12.2?
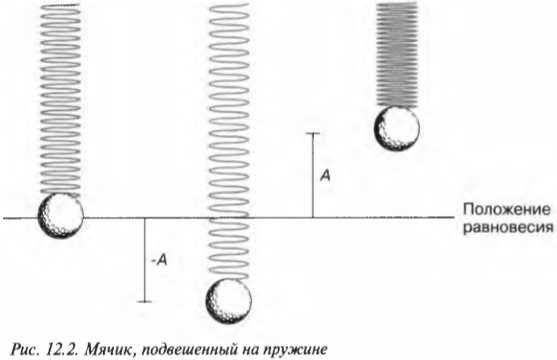
В подвешенном состоянии изменится положение равновесия, но после воздействия внешней силы мячик будет совершать аналогичные периодические движения, но теперь уже вверх-вниз.
Это новое равновесное положение определяется равенством веса мячика ( mg ) и силы упругости ( ky_0 ) растянутой пружины под действием этого веса:

Итак, новое положение исходного равновесия будет определяться формулой:

Теперь если потянуть мячик вниз с помощью внешней силы и отпустить мячик, то он начнет совершать периодическое движение, как и в прежнем примере (см. рис. 12.1), но теперь уже относительно нового положения равновесия.
Периодическое движение подобного рода называется периодическим колебанием, а крайние положения мячика при таком периодическом движении мячика называются амплитудами периодических колебаний. Амплитуда является важным элементом математического описания простого гармонического движения.
Изучаем свойства простого гармонического движения
Представьте себе, что для изучения простого гармонического движения ученые решили освещенный фонариком мячик из предыдущего примера заснять на движущуюся по горизонтали фотопленку.
После проявки фотопленки на ней оказался четкий волнообразный след, который показан на рис. 12.3.
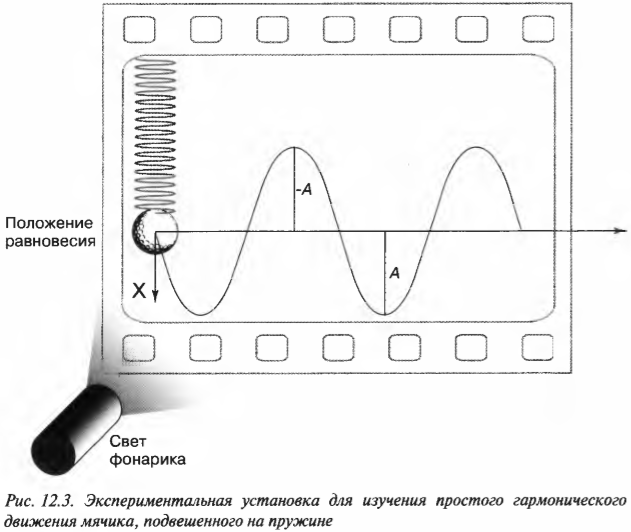
Оказывается, мячик действительно совершает периодические движения вверх-вниз относительно исходного равновесного положения с амплитудой А. Вблизи точки равновесия скорость мячика максимальна, а в точках амплитуды минимальна.
Траектория мячика очень похожа на синусоидальную кривую, т.е. след мячика на движущейся фотопленке описывается графиком функции ( sin ) (“синус”) либо ( cos ) (“косинус”) со сдвигом от начала координат. Действительно, решением уравнения простого гармонического движения является функция ( sin ) или ( cos ).
Изучаем траекторию простого гармонического движения
Построим и рассмотрим внимательно кривую функции:

Наверняка эта функция и ее графическое представление в виде синусоидальной кривой уже знакомо многим читателям этой книги из курса математики. Ее часто можно встретить на экранах разных приборов в реальной жизни или даже в виртуальном мире кино и компьютерных игр.
Пусть освещенный фонариком мячик движется по окружности перпендикулярной плоскости страницы и снимается на движущуюся по горизонтали фотопленку. Тогда после проявки фотопленки на ней снова появится синусоидальная кривая, как показано на рис. 12.4.
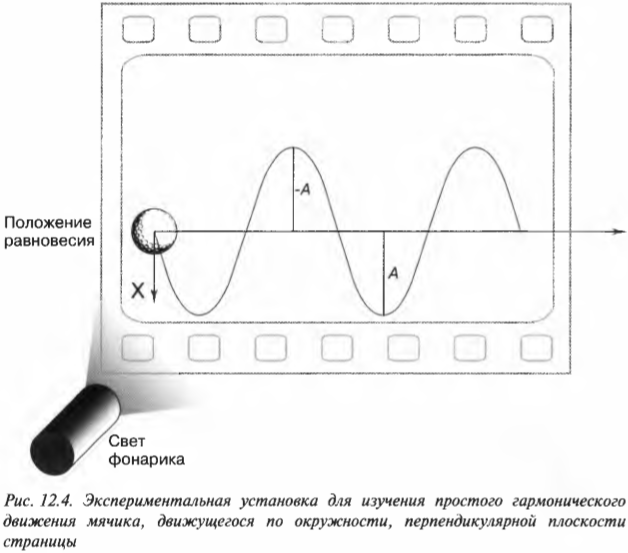
Если расположить окружность так, чтобы она была параллельна плоскости страницы (рис. 12.5), то можно легко заметить, что положение мячика определяется формулой:

где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( theta ) — это угол поворота мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
Если мячик вращается по окружности с постоянной угловой скоростью, то ( theta=omega t ) и ( x=Acos(omega t) ).
Определяем период простого гармонического движения
Прохождение мячиком пути, равного длине окружности, называется циклом, а время его прохождения — периодом. Период обозначается символом ( T ) и измеряется в секундах.
На рис. 12.4 и 12.5 полный цикл соответствует движению мячика от исходного положения с амплитудой ( A ), затем к положению с амплитудой ( -A ), а потом снова к положению с амплитудой ( A ).
Как связан период с уже знакомыми нам параметрами движения? За один цикл мячик проходит угол величиной ( 2pi ) за период ( T ), т.е. его угловая скорость равна:


Откуда получаем выражение для периода:

Для характеристики периодического движения часто используют понятие частота, которое равно количеству циклов за единицу времени. Например, если мячик на рис. 12.4 совершает 1000 полных оборотов в секунду, то его частота равна 1000 с-1. В системе СИ частоту измеряют в герцах (или сокращенно Гц), т.е. 1 с-1 = 1 Гц. Таким образом, частота вращения мячика по окружности равна 1000 Гц.
Частота ( f ) и период ( T ) связаны очень простым соотношением:

Поскольку:

то теперь можно легко найти связь между частотой и угловой скоростью:
При описании периодических движений угловую скорость ( omega ) часто называют циклической частотой.
Определяем скорость в простом гармоническом движении
На рис. 12.5 мячик совершает движение по окружности, а координата перемещения по оси X определяется формулой:
где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( omega ) — это угловая скорость мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
В любой точке с координатой х мячик обладает некоторой скоростью, которая зависит от времени. Как выразить ее с помощью математической формулы?
Очень просто, ведь для этого достаточно вспомнить о связи между угловой ( omega ) и тангенциальной ( v ) скоростью (см. главу 10):

Поскольку в данном случае ( r=A ), то в итоге получим для тангенциальной скорости:

Теперь для определения скорости периодических колебаний следа мячика по оси X на фотопленке нужно вычислить проекцию тангенциальной скорости на ось X:

(Здесь знак “минус” возникает, поскольку фотопленка движется вниз и ось Y направлена вниз, а потому угол ( beta ) между вектором скорости и осью X равен ( 180^circ+theta ), a ( sin(beta)=sin(180^circ+theta )=-sin(theta) ). — Примеч. ред.)
После подстановки выражений для ( theta=omega t ) и для ( v=Aomega ) получим:

Обратите внимание, что скорость меняется от исходного положения с амплитудой перемещения ( A ) и амплитудой скорости ( 0 ), затем к положению с амплитудой перемещения ( 0 ) и амплитудой скорости ( -Aomega ), потом к положению с амплитудой перемещения ( -A ) и амплитудой скорости ( 0 ), затем к положению с амплитудой перемещения ( 0 ) и амплитудой скорости ( Aomega ), а потом снова к положению с амплитудой перемещения ( A ) и амплитудой скорости ( 0 ).
Как видите, в простом гармоническом движении амплитуда скорости ( A_v=Aomega ) связана с амплитудой перемещения ( A_х=A ) формулой:

Рассмотрим следующий простой пример. Представьте себе, что несколько отчаянных парней и девушек прыгают с высоты с помощью эластичной веревки. Известно, что при прыжке с некоторой высоты относительно точки равновесия максимальная скорость в точке равновесия одного из смельчаков достигает величины 4 м/с. Он решает в 10 раз увеличить высоту прыжка. Какой будет его максимальная скорость в точке равновесия?
Итак, амплитуда скорости в первом прыжке ( A_{v1}=-A_{х1}omega ) равна 4 м/с. Амплитуда перемещения во втором прыжке (с новой высоты) в 10 раз больше амплитуды перемещения в начале, т.е. ( A_{х2}=10A_{х1} ). Вопрос: чему равна амплитуда скорости ( A_{v2}=-A_{х2}omega ) во втором прыжке? Подставляя выражение для ( A_{х2}=-omega/A_{v1} ) в формулу ( A_{х2}=10A_{х1} ), а затем в формулу ( A_{v2}=-A_{х2}omega ), получим:

Итак, при увеличении амплитуды прыжка в 10 раз амплитуда скорости возрастает тоже в 10 раз, т.е. становится равной 40 м/с.
Определяем ускорение в простом гармоническом движении
Вернемся к примеру на рис. 12.5, где мячик совершает движение по окружности. Его координата перемещения по оси X определяется формулой:
где ( x ) — это текущее смещение мячика по оси X от положения равновесия, ( omega ) — это угловая скорость мячика при вращении по окружности, а ( A ) — это амплитуда периодического движения.
Как мы уже выяснили в предыдущем разделе, его скорость перемещения по оси X определяется формулой:
Однако вращательное движение мячика также характеризуется центростремительным ускорением. Как выразить ее с помощью математической формулы?
Как известно (см. главу 10), угловая скорость ( omega ) центростремительное ускорение ( a ) связаны следующей формулой:

Поскольку в данном случае ( r=A ), то в итоге получим для центростремительного ускорения:

Теперь для определения ускорения периодических колебаний следа мячика по оси X на фотопленке нужно вычислить проекцию центростремительного ускорения на ось X:

(Здесь знак “минус” возникает, поскольку фотопленка движется вниз и ось Y направлена вниз, а потому угол ( gamma ) между вектором центростремительного ускорения и осью X равен ( 180^circ + theta ), a ( cos(gamma)=cos(180^circ + theta)=-cos(theta) ). — Примеч. ред.)
После подстановки выражений для ( theta=omega t ) и для ( a=Aomega^2 ) получим:

Как видите, в простом гармоническом движении амплитуда ускорения ( A_а=Aomega^2 ) связана с амплитудой перемещения ( A_х=A ) формулой:

Рассмотрим еще один простой пример. Пусть диафрагма (тоненькая пластинка) в трубке домашнего телефона совершает простое гармоническое движение с частотой ( theta=omega t ) величиной 1 кГц (т.е. 1000 Гц) и амплитудой перемещения ( A_х=A ) величиной 1,0·10-4 м. Чему равна амплитуда ускорения мембраны ( A_а )?
Поскольку ( omega=2pi!f ), то после подстановки этого выражения в предыдущую формулу ( A_а=-A_хomega^2 ) получим:

Подставляя численные значения, получим:

Как видите, мембрана обычного телефона испытывает очень большое ускорение, которое почти в 400 раз больше ускорения свободного падения ( g ) = 9,8 м/с2 под действием гравитационного притяжения Земли.
Определяем частоту колебаний груза на пружине
С математической точки зрения колебания груза на пружине и движение мячика по окружности (см. предыдущие разделы этой главы) принципиально не отличаются. Дело в том, что оба эти движения являются простыми гармоничными. Поэтому их основные характеристики (например, скорость, ускорение, частота и период колебаний) должны описываться аналогичными математическими формулами. Остановимся и подробно проследим за этой аналогией.
Как известно, согласно закону Гука (см. выше в этой главе), при растяжении пружины на величину ( x ) возникает упругая сила ( F ), которая равна:

где ( k ) — это коэффициент пропорциональности.
Согласно закону Ньютона (см. главу 5), сила и вызванное ею ускорение ( a ) связаны следующим соотношением:

откуда получаем:

Из предыдущего раздела нам уже известно, что в простом гармоническом движении перемещение и ускорение выражаются следующими формулами:
и
Подставляя эти выражения в предыдущую формулу, полученную на основе законов Гука и Ньютона, получим:

Сокращая некоторые переменные, получим:

Откуда легко можно выразить циклическую частоту:

Поскольку ( omega=2pi!f ) и ( omega=2pi/T ), то после подстановки предыдущего выражения в эти формулы получим:

и

Пусть пружина на рис. 12.1 обладает коэффициентом упругости ( k ), равным 1,0·10-2 Н/м, а к ней прикреплен груз массой 4 г. Чему будет равен период колебаний груза на пружине? Подставляя значения в предыдущую формулу для периода, получим:

А какова частота этих колебаний? Снова подставляя значения в предыдущую формулу для частоты, получим:

Используя формулы перемещения, скорости и ускорения для простого гармонического движения (см. ранее в этой главе):
можно вычислить координату, скорость и ускорение груза на пружине в произвольный момент времени. Как будут выглядеть эти формулы для задачи с грузиком на пружине?
Сначала вычислим циклическую частоту:
Если амплитуда ( A ) равна 10 см, то получим:
Вычисляем энергию простого гармонического движения
В простом гармоническом движении периодически происходит увеличение и уменьшение кинетической энергии, например груза на пружине. Ясно, что кинетическая энергия груза не пропадает, а преобразуется в энергию сжатой или растянутой пружины. Эта энергия называется упругой потенциальной энергией пружины. Сколько энергии запасено в сжатой или растянутой пружине?
Попробуем вычислить ее с помощью простых соображений. Как известно, работа ( A ) силы ( F ) при перемещении на расстояние ( s ) равна:

При сжатии или растяжении пружины сила ( F ) меняется линейно с расстоянием, поэтому работу этой силы по сжатию или растяжению пружины на расстояние ( s ) можно представить как произведение средней силы ( overline{F} ) на перемещение ( s ):

Средняя ( overline{F} ) сила определяется как:

где ( F_1=-kx_1 ) — это сила упругости в точке с координатой ( x_1 ), a ( F_2=-kx_2 ) — сила упругости в точке с координатой ( x_2 ). При этом перемещение ( s ) будет равно:

Подставляя выражения для ( s ) и ( overline{F} ) в формулу работы, получим:

Члены ( frac{kx^2_1}{2} ) и ( frac{kx^2_2}{2} ) выражают упругую потенциальную энергию пружины ( E_{у1} ) и ( E_{у2} ) в точках с координатами ( x_1 ) и ( x_2 ), соответственно. Таким образом, работа силы упругости равна изменению упругой потенциальной энергии пружины:
Рассмотрим простой пример. Насколько возрастет упругая потенциальная энергия пружины с коэффициентом упругости 1,0·10-2 Н/м при сжатии ее на 10 см? Подставляя значения в формулу

получим:

Учтите, что при изменении упругой потенциальной пружины с грузом (при отсутствии внешних сил) изменяется кинетическая энергия груза. Причем эти изменения происходят так, что неизменной остается полная энергия системы, состоящей из пружины и груза. Например, при достижении точки равновесия пружина полностью разжимается, и ее упругая потенциальная энергия становится равной нулю, а кинетическая энергия груза при этом становится максимальной. И наоборот, при максимальном сжатии или растяжении пружины ее упругая потенциальная энергия становится максимальной, а кинетическая энергия груза при этом становится равной нулю.
Качаемся вместе с маятником
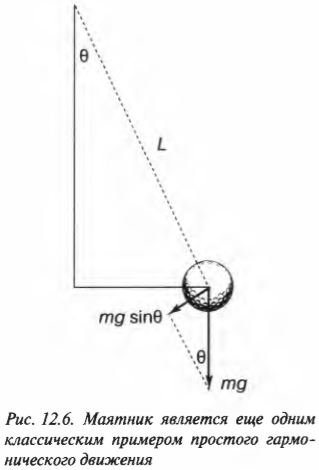
Еще одним типичным примером простого гармонического движения (кроме груза на пружине) является простой маятник, который показан на рис. 12.6.
Можно ли движение маятника описать математическими формулами простого гармонического движения, которые (выше в этой главе) использовались для описания движения груза на пружине? Да, и вот почему.
Дело в том, что на маятник, подвешенный на нити длиной ( L ) и отклоненный на угол ( theta ), действует сила гравитационного притяжения ( mathbf{F}=mmathbf{g} ). Перпендикулярная нити компонента силы создает сопротивление движению:

Момент этой компоненты силы

определяет угловое ускорение маятника ( alpha ):

Отсюда получаем формулу математического маятника:
(Математическим маятником называется идеализированная система, состоящая из невесомой и нерастяжимой нити, на которой подвешен груз с массой, сосредоточенной в одной точке. — Примеч. ред.)
При малых колебаниях, т.е. при малых значениях угла ( theta ); можно считать, что ( sin(theta)approxtheta ), и тогда прежняя формула приобретает следующий вид:

Эта формула связи ускорения и перемещения объекта очень похожа на прежние формулы простого гармонического движения груза на пружине и мячика по окружности (см. ранее в этой главе). Но прежде в эту формулу входило линейное перемещение, а теперь — угловое.
По аналогии с прежними формулами связи ускорения и перемещения объекта, совершающего простое гармоническое движение, коэффициент пропорциональности между ускорением и перемещением ( g/L ) равен квадрату циклической частоты ( omega^2 ). Отсюда получаем, что:

Далее, поскольку ( omega=2pi!f ) и ( omega=2pi/T ), то после подстановки предыдущего выражения в эти формулы получим:

и

Обратите внимание, что период качаний математического маятника не зависит от его массы!
Глава 12. Сжимаем пружины: простое гармоническое движение
3.4 (67.27%) 11 votes
Расчет пружины сжатия
Опубликовано 01 Июн 2013
Рубрика: Механика | 104 комментария
 Перед написанием этого поста я решил заглянуть в Интернет и узнать, что он мне предложит на запрос «расчет пружины сжатия». Посмотрел первый и второй в выдаче Google сайты, и не очень они мне понравились. Если честнее и точнее, то – очень не понравились…
Перед написанием этого поста я решил заглянуть в Интернет и узнать, что он мне предложит на запрос «расчет пружины сжатия». Посмотрел первый и второй в выдаче Google сайты, и не очень они мне понравились. Если честнее и точнее, то – очень не понравились…
…На первом сайте на основе семи исходных данных программно рассчитываются еще шесть параметров с огромным количеством знаков после запятой и с какой-то безысходной однозначностью. На втором — сайте специализированного завода – расчет выполняется верно, оформление – хорошее, но для меня не хватает диалога с программой по ходу работы. Почему навязывается конкретный шаг витков? Индекс пружины может быть любым? Так, все – достаточно критики. Всем не угодишь!
Предлагаю вашему вниманию свой вариант выполнения расчета в режиме диалога с пользователем. Программа была написана в далеком феврале две тысячи второго года, но не думаю, что с тех пор что-то существенно изменилось в теории расчетов пружин.
Расчет пружины сжатия будет выполняться в программе MS Excel.
Во-первых, расчет мы будем выполнять для стальных витых цилиндрических пружин.
Во-вторых, будем у всех пружин поджимать и шлифовать по ¾ витка с каждой стороны – это был наиболее приемлемый вариант для меня, как конструктора, по ряду экономических и технологических причин.
Чуть ниже этого текста представлены скриншоты программы.
Внимание!!!
После выполнения расчета по программе выполняйте проверку касательных напряжений!!!

1. Конструктор, разрабатывая узел с пружиной, примерно, из опыта и располагаемого пространства может предварительно задать диаметр проволоки (D) в мм
в ячейку C2: 3,0
2. Наружный диаметр (D1) будущей пружины в мм
в ячейку C3: 20,0
3. Программа рассчитывает индекс пружины (I)
в ячейке C4: =C3/C2-1=5,7
I = D1/D-1
*. Если индекс (I) меньше четырех («еще не пружина»), Excel выводит сообщение
в ячейке B5: Увеличь D1 или уменьши D!
*. Если индекс (I) больше двенадцати («уже не пружина»), программа выводит указание изменить D и/или D1
в ячейку B6: Уменьши D1 или увеличь D!
Если значения индекса (I) находятся между четырьмя и двенадцатью, все в порядке – никаких сообщений нет, как в нашем примере, идем дальше. Кстати, индекс (I) – это отношение среднего диаметра навивки (D1—D) к диаметру проволоки (D).
4. Жёсткость одного витка (C1) вычисляется в Н/мм
в ячейке C7: =78500*C2/8/C4^3=161,8
C1 = 78500*D/8/I^3
Здесь 78500 МПа – модуль сдвига пружинной стали.
5. Предварительная сила при рабочей деформации (~F2) конструктору так же на этом этапе обычно известна – это то, что он хочет от пружины! Записываем ее в Н
в ячейку C8: 300,0
6. Теперь Excel рассчитывает номинальный расчётный шаг пружины в свободном состоянии (Tnom) в мм
в ячейке C9: = 1,25*C8/C7+C2=5,3
Tnom = 1.25*F2/C1+D

7. Так же Excel рассчитывает максимальный расчётный шаг в свободном состоянии (Tmax) в мм
в ячейке C10: =ПИ()*(C3-C2)* TAN (ПИ()/18)=9,4
Tmax = 3,14*(D1—D)*tg (3,14/ 18)
*. Если окажется, что номинальный шаг (Tnom) больше максимального (Tmax), то программа выведет сообщение, что сила F2 очень велика
в ячейку B11: Уменьши F2!
8. В нашем примере — все в порядке, сообщений нет, идем дальше, выбираем шаг пружины в свободном состоянии (T) в мм, руководствуясь полученными выше результатами. Пишем
в ячейку C12: 6,0
*. Если пользователь ошибется и введет значение шага (T) меньше номинального расчетного шага (Tnom), тогда Excel укажет на ошибку
в ячейке B13: Увеличь T!
*. Аналогично, если пользователь ошибется и введет значение шага (T) больше максимального расчетного шага (Tmax), тогда указание на ошибку будет
в ячейке B14: Уменьши T!
9. Далее программа рассчитывает максимальную деформацию одного витка пружины (S3) в мм до соударения витков. Результат выводится
в ячейку C15: =C12-C2=3,0
S3 = T—D
10. Сила при максимальной деформации (F3) в Н рассчитывается и выводится
в ячейку C16: =C7*C15=485,3
F3 = C1*S3
11. Теперь конструктору необходимо задать длину пружины при рабочей деформации (L2) в мм
в ячейку C17: 50,0
12. Программа вычисляет расчётное число рабочих витков (Nрасч)
в ячейке C18: =(C17-C2)/(C2+C16/C7-C8/C7)=11,3
Nрасч = (L2—D)/(D+F3/C1—F2/C1)
13. Округляя полученное значение, выбираем число рабочих витков (N) и записываем
в ячейку C19: 11,5
14. Далее Excel вычисляет жёсткость пружины (C) в Н/мм
в ячейке C20: =C7/C19=14,1
C = C1/N
15. Программа определяет длину пружины в свободном состоянии (L0) в мм
в ячейке C21: =C19*C12+C2=72,0
L0 = N*T+D
*. Теперь Excel сравнивает длины и, если длина в рабочем состоянии (L2) больше длины в свободном состоянии (L0), выдает указание
в ячейку B22: Увеличь N!
В нашем примере – все хорошо, сообщений нет.
16. Длина пружины при максимальной деформации (L3) в мм выводится
в ячейку C23: =C19*C2+C2=37,5
L3 = N*D+D
*. Если длина при максимальной деформации (L3) больше длины в рабочем состоянии (L2), программа требует уменьшить число рабочих витков (N), выводя соответствующее сообщение
в ячейку B24: Уменьши N!
17. Сила пружины при рабочей деформации (F2) в Н уточняется расчетом
в ячейке C25: =C20*C21-C20*C17=309,5
F2 = C*L0—C*L2
18. И последнее, что необходимо задать конструктору, это — длину пружины при предварительной деформации (L1) в мм
в ячейку C26: 60,0
*. Если длина при предварительной деформации (L1) больше длины в свободном состоянии (L0), программа потребует уменьшить длину при предварительной деформации (L1), выводя соответствующее сообщение
в ячейку B27: Уменьши L1!
*. Если длина при предварительной деформации (L1) меньше длины при рабочей деформации (L2), программа потребует увеличить длину при предварительной деформации (L1), выводя соответствующее сообщение
в ячейку B28: Увеличь L1!
19. Далее Excel вычисляет силу пружины при предварительной деформации (F1) в Н
в ячейке C29: =C20*C21-C20*C26=168,8
F1 = C*L0—C*L1
20. Полное число витков (N1) выводится
в ячейку C30: =C19+1,5=13,0
N1 = N+1,5
21. Угол подъёма витка пружины (A) в градусах рассчитывается
в ячейке C31: =ATAN (C12/ПИ()/(C3-C2))*180/ПИ()=6,4
A = arctg (T/3,14/(D1—D))*180/3,14
По-моему, этот угол не должен превышать 10 градусов.
22. Длина развёрнутой пружины (Lразв) в мм вычисляется
в ячейке C32: =ПИ()*C30*(C3-C2)/COS (C31/180*ПИ())=698,7
Lразв =3,14*N1*(D1—D)/cos (A/180*3,14)
23. И, наконец, последний расчетный параметр — масса пружины (G) в кг выводится
в ячейку C33: =ПИ()*C2^2/4*C32*7,85/10^6=0,039
G = 3.14*D^2/4* Lразв*7.85/10^6
Итак, мы с вами прошли очень подробно, по шагам, весь расчет пружины сжатия. Надеюсь, что не очень сильно утомил вас.
Возможно, вам понравился принцип пошагового алгоритма в режиме диалога программы с пользователем? Напишите пару строк в комментариях — мне будет очень интересно ваше мнение. Мне такой подход нравится. Он «дробит» сложные и запутанные алгоритмы решений на простые «кирпичики», с которыми разобраться легко! Особенно нравятся хорошо проработанные ситуации, когда вопрос в «кирпичике» требует ответа: либо – «да», либо – «нет.
Ссылка на скачивание файла: raschet-pruzhiny-szhatiya (xls 49,5KB).
P. S. (11.03.2017)
В связи с большим интересом посетителей блога к коническим пружинам до написания статьи на эту тему выкладываю файл, присланный мне одним из читателей. Желающие могут поработать с алгоритмом и формулами. Размещаю ссылку на файл в том виде, в каком получил его от Андрея (urandart@gmail.com): konicheskaya-pruzhina-2 (xls 26KB).
P. S. (22.08.2018)
В файл программы добавлены расчеты касательных напряжений при рабочей и максимальной деформациях.
Другие статьи автора блога
На главную
Статьи с близкой тематикой
Отзывы
Деформации. Силы упругости. Закон Гука
Пластическими деформациями называются деформации, полностью или частично сохраняющиеся после прекращения действии внешних сил.
Способность к упругим и пластическим деформациям зависит от природы вещества, из которого состоит тело, условий, в которых оно находится; способов его изготовления. Например, если взять разные сорта железа или стали, то у них можно обнаружить совершенно разные упругие и пластичные свойства. При обычных комнатных температурах железо является очень мягким, пластичным материалом; закаленная сталь, наоборот, — твердый, упругий материал. Пластичность многих материалов представляет собой условие для их обработки, для изготовления из них нужных деталей. Поэтому она считается одним из важнейших технических свойств твердого вещества.
При деформации твердого тела происходит смещение частиц (атомов, молекул или ионов) из первоначальных положений равновесия в новые положения. При этом изменяются силовые взаимодействия между отдельными частицами тела. В результате в деформированном теле возникают внутренние силы, препятствующие его деформации.
Различают деформации растяжения (сжатия), сдвига, изгиба, кручения.
Силы упругости
Силы упругости имеют электромагнитную природу. Они препятствуют деформациям и направлены перпендикулярно поверхности соприкосновения взаимодействующих тел, а если взаимодействуют такие тела, как пружины, нити, то силы упругости направлены вдоль их оси.
Силу упругости, действующую на тело со стороны опоры, часто называют силой реакции опоры.
![[x=Delta l=l-l_0]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-486bf1c1ceebc465fec1e5e848b74a6c_l3.png)
где  и
и  длина тела в деформированном и недеформированном состоянии соответственно.
длина тела в деформированном и недеформированном состоянии соответственно.
![[varepsilon =frac{Delta l}{l_0} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-3fb8a5bf6b71646d7a642ba2a5f57309_l3.png)
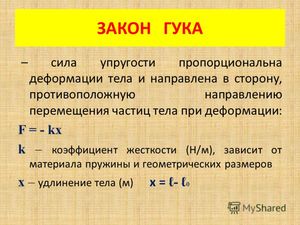
Закон Гука
Небольшие и кратковременные деформации с достаточной степенью точности могут рассматриваться как упругие. Для таких деформаций справедлив закон Гука:
- Сила упругости, возникающая при деформации тела прямо пропорциональна абсолютному удлинению тела и направлена в сторону, противоположную смещению частиц тела:
![[F_x=-kx]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-7499e62f2008d4957080b74a8e8d7427_l3.png)
где  проекция силы на ось
проекция силы на ось  жесткость тела, зависящая от размеров тела и материала, из которого оно изготовлено, единица жесткости в системе СИ Н/м.
жесткость тела, зависящая от размеров тела и материала, из которого оно изготовлено, единица жесткости в системе СИ Н/м.
Примеры решения задач
| Задание | Пружина жесткостью  Н/м в ненагруженном состоянии имеет длину 25 см. Какова будет длина пружины, если к ней подвесить груз массой 2 кг? Н/м в ненагруженном состоянии имеет длину 25 см. Какова будет длина пружины, если к ней подвесить груз массой 2 кг? |
| Решение | Сделаем рисунок. |
На груз, подвешенный на пружине, действуют сила тяжести  и сила упругости
и сила упругости  .
.
![[moverline{g}+overline{F}=0]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-4d4e8a522bb848b9a70ab0161fe35933_l3.png)
Спроектировав это векторное равенство на координатную ось  , получим:
, получим:
![[-mg+F=0]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-af167ad9c22a4029857926b1140115fb_l3.png)
![[F=mg]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-61dc0687928e1a1b5efed230cf31d17f_l3.png)
По закону Гука сила упругости:
![[F=kx=kleft(l-l_0right)]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-f77f6aa4159ab187d0010d913a6eb5ab_l3.png)
поэтому можно записать:
![[kleft(l-l_0right)=mg]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-5907c6ca2f3d7b830aaf51ca08ba1386_l3.png)
![[kl-kl_0=mg]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-02deae6d9a97c5c327ac5b6b3780c6d1_l3.png)
![[kl=mg+kl_0]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-709dff678f8d25014151b086afd4737c_l3.png)
откуда длина деформированной пружины:
![[l=l_0+frac{mg}{k} ]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-64454070aa3fb85987964ceb48d0846a_l3.png)
Переведем в систему СИ значение длины недеформированной пружины  см
см  м.
м.
Ускорение свободного падения  м/с
м/с  .
.
Подставив в формулу численные значения физических величин, вычислим:
![[l=0,25+frac{2cdot 9,8}{5cdot {10}^2}=0,29 m=29 cm]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-cea1112bd6c44f460a588d4a54b7a378_l3.png)
| Задание | По горизонтальной поверхности передвигают тело массой 3 кг с помощью пружины жесткостью  Н/м. На сколько удлинится пружина, если под ее действием при равноускоренном движении за 10 с скорость тела изменилась от 0 до 20 м/с? Трением пренебречь. Н/м. На сколько удлинится пружина, если под ее действием при равноускоренном движении за 10 с скорость тела изменилась от 0 до 20 м/с? Трением пренебречь. |
| Решение | Сделаем рисунок. |
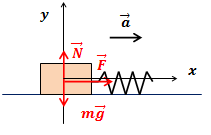
На тело действуют сила тяжести , сила реакции опоры  и сила упругости пружины .
и сила упругости пружины .
![[moverline{g}+overline{N}+overline{F}=moverline{a}]](http://ru.solverbook.com/wp-content/ql-cache/quicklatex.com-0cb280c88f7441df78e45cbd8b2f94ca_l3.png)
Выберем систему координат, как показано на рисунке и запишем это векторное равенство в проекциях на оси координат:
Как рассчитать пружину
Как найти коэффициент жёсткости пружины: формула, определение
Рано или поздно при изучении курса физики ученики и студенты сталкиваются с задачами на силу упругости и закон Гука, в которых фигурирует коэффициент жесткости пружины. Что же это за величина, и как она связана с деформацией тел и законом Гука?
Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня. В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу». Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).
Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Расчет жесткости системы
Встречаются более сложные задачи, в которых необходим расчет общей жесткости. В таких заданиях пружины соединены последовательно или параллельно.
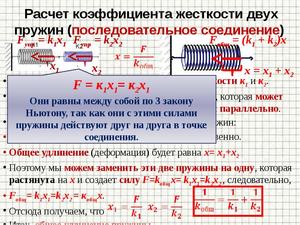
Последовательное соединение системы пружин
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
1/k = 1/k1 + 1/k2 + … + 1/ki,
где k — общая жесткость системы, k1, k2, …, ki — отдельные жесткости каждого элемента, i — общее количество всех пружин, задействованных в системе.
Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так:
k = k1 + k2 + … + ki.
Измерение жесткости пружины опытным путем — в этом видео.
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
Определение
Жесткость — способность твёрдого тела, конструкции или её элементов сопротивляться деформации от приложенного усилия вдоль выбранного направления в заданной системе координат.
Сила жесткости — сила, возникающая в теле в результате его деформации и стремящаяся вернуть его в исходное состояние.
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут.
От чего зависит жесткость
Жесткость пружины зависит от нескольких параметров:
- геометрии пружины;
- типа материала;
- коэффициента;
- срока эксплуатации.
Геометрия пружины
На жесткость витой пружины влияет:
- количество витков;
- их диаметр;
- диаметр проволоки.
Диаметр намотки измеряется от оси пружины. Так как длина проволоки в пружине значительно больше длины упругого стержня, сопротивляемость внешней деформации многократно возрастает.
Волновые пружины состоят из металлических лент, навитых ребром по окружности заданного диаметра.
Их основные геометрические параметры:
- количество витков;
- количество волн на виток;
- сечение ленты.
Тип материала
У каждого материала есть условный предел упругости, характеризующий его способность восстанавливаться после деформации. Если этот предел превышается, в структуре материала возникают необратимые изменения.
Определение
Предел упругости — механическая характеристика материала, показывающая максимальное напряжение, при котором имеют место только упругие, обратимые деформации.
Предел упругости измеряют в паскалях и определяют по формуле:
(sigma_{у;}=;frac FS)
где F — действие внешней силы на исследуемый образец, приводящее к повреждениям, а S — его площадь.
Кроме предела упругости, существуют такие характеристики упругости материалов, как модули упругости (модуль Юнга) и сдвига, коэффициент жесткости и другие. Все они взаимосвязаны, поэтому, выяснив значение одной из величин с помощью справочной таблицы, можно вычислить другие.
Коэффициент
Определение
Согласно закону Гука, при малой деформации абсолютная величина силы упругости прямо пропорциональна величине деформации.
Эта линейная зависимость описывается формулой:
(F=;k;times;x)
где k — коэффициент жесткости, а х — величина, на которую сжалась или растянулась пружина.
Примечание
Деформация считается малой в том случае, когда изменение размеров тела значительно меньше его первоначальных размеров.
Срок эксплуатации
Нахождение под напряжением приводит к постепенной необратимой деформации, называемой ослаблением пружины.
Жесткость пружины влияет на срок ее эксплуатации, как и сила воздействия. Конструкторы пружин, предварительно рассчитав эти параметры, проводят тесты на прототипах, прежде чем начать массовое производство. В специальных установках для испытания на усталость материала их сжимают и отпускают определенное количество циклов, отдельно проверяя поведение пружин при максимальной и минимальной нагрузке.
В чем измеряется жесткость
Жесткость пружины в системе СИ измеряется в ньютонах на метр, Н/м. Также встречается единица измерения ньютон на миллиметр, Н/мм. Численно жесткость равна величине силы, изменяющей размер пружины на метр длины.
Как обозначается
Коэффициент жесткости пружины обозначают буквой k.
Коэффициент жесткости пружины
Определение
Коэффициент жесткости — коэффициент, связывающий в законе Гука удлинение упругого тела и возникающую вследствие этого удлинения силу жесткости.
Применяется в механике твердого тела в разделе упругости.
Формула расчета через массу и длину
Используя закон Гука, коэффициент жесткости можно вычислить по формуле:
(k;=;frac Fx)
Чтобы выяснить силу тяжести, воздействующую на пружину, нужно воспользоваться формулой:
(F;=;m;times;g)
где m — масса подвешенного на пружине тела, а g — величина свободного ускорения, равная 9,8.
Чтобы найти х, нужно дважды измерить длину пружины и вычислить разницу между этими двумя значениями.
При соединении нескольких пружин общая жесткость системы меняется. Коэффициенты каждой из пружин суммируются при параллельном соединении. При последовательном соединении общая жесткость вычисляется по формуле:
(frac1k;=;(frac1{k_1};+;frac1{k_2};+;…;+;frac1{k_n}))
Как можно измерить жесткость
Измерительные приборы
Приборы для испытания пружин на сжатие-растяжение контролируют приложенное усилие с помощью тензометрического датчика, а также изменение их длины, выводя показатели на дисплей. Без специального прибора измерить осевую жесткость можно, используя динамометр и линейку.
Существуют приборы и для измерения поперечной жесткости пружин. Для этого нужно измерить смещение нескольких точек пружины, определив расстояние и угол между ними.
Практическая задача
Самый простой способ измерить жесткость пружины — провести стандартный школьный опыт со штативом и подвешенными на пружине грузиками.
Для измерения осевой жесткости спиральной пружины используют:
- штатив, на котором закрепляют пружину;
- крючок, который крепят на свободный ее конец;
- грузики с известной массой, которые подвешивают на свободный конец пружины;
- линейку, чтобы измерить длину пружины с грузом и без груза.
Проведя несколько измерений с грузиками разной массы и вычислив силу тяжести, воздействовавшую на пружину в каждом из них, можно построить график зависимости длины пружины от приложенного усилия и узнать среднее значение коэффициента жесткости.
Альтернативные способы определения жесткости
Жесткость пружины можно определить и через период ее колебания, воспользовавшись формулой:
(Т;=;2mathrmpisqrt{frac{mathrm m}{mathrm k}})
Или через частоту колебаний по формуле:
(omega=;sqrt{frac{mathrm k}{mathrm m}})
Проводя опыт с пружиной, закрепленной на штативе, и грузиками с известной массой, можно не измерять длину пружины, а привести ее в колебательное движение и сосчитать количество колебаний в период времени.
Формула расчета через длину, дающая более точные результаты и применимая к пружинам со значительной деформацией, различается для пружин разных геометрических параметров. Например, жесткость витой цилиндрической пружины, упруго деформируемой вдоль оси, вычисляется по формуле:
(k=;frac{d_D^4;times;G}{8;times;d_F^3;times;n})
где (d_D) — диаметр проволоки, (d_F) — диаметр намотки, (G) — модуль сдвига, который зависит от материала, а (n) — число витков.
Задача
Рассчитайте коэффициент жесткости пружины, если известно, что ее диаметр 20 мм, диаметр проволоки 1 мм, число витков — 25. Модуль сдвига равен (8times;10^{10};) Па.
Решение
Переведем числовые значения в систему СИ и подставим в формулу:
(k;=;frac{{(10^{-3})}^{4;}times8;times;10^{10}}{8;times;left(2;times;10^{-2}right)^3;times;25})
(k = 100 frac Нм)
Жесткость при деформации кручения существенно отличается от жесткости сжатия-растяжения. Предел прочности при кручении у любого материала будет меньше, чем предел прочности при сжатии-растяжении или изгибе. Торсионная жесткость, также называемая крутильной, в системе СИ измеряется в ньютон-метрах на радиан, сокращенно Н-м/рад. Ее можно определить по формуле:
(k;=;frac Malpha)
где (М) — крутящий момент, приложенный к телу, а (alpha) — угол закручивания тела по оси приложения крутящего момента.
Рано или поздно при изучении курса физики ученики и студенты сталкиваются с задачами на силу упругости и закон Гука, в которых фигурирует коэффициент жесткости пружины. Что же это за величина, и как она связана с деформацией тел и законом Гука?
Содержание:
- Сила упругости и закон Гука
- Определение коэффициента жесткости
- Расчет жесткости системы
- Последовательное соединение системы пружин
- Параллельное соединение системы пружин
- Вычисление коэффициента жесткости опытным методом
- Примеры задач на нахождение жесткости
- Видео
Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = — k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня. В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу». Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).
Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
k = F/x.
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Расчет жесткости системы
Встречаются более сложные задачи, в которых необходим расчет общей жесткости. В таких заданиях пружины соединены последовательно или параллельно.
Последовательное соединение системы пружин
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
1/k = 1/k1 + 1/k2 + … + 1/ki,
где k — общая жесткость системы, k1, k2, …, ki — отдельные жесткости каждого элемента, i — общее количество всех пружин, задействованных в системе.
Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так:
k = k1 + k2 + … + ki.
Измерение жесткости пружины опытным путем — в этом видео.
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
- Найдем силу тяжести, деформирующей пружину: F = mg = 10 · 9.8 = 98 Н.
- Определим коэффициент упругости: k = F/x = 98 / 0.04 = 2450 Н/м.
- Рассчитаем, с какой силой действует второй груз: F = mg = 25 · 9.8 = 245 Н.
- По закону Гука запишем формулу для абсолютного удлинения: x = F/k.
- Для второго случая подсчитаем длину растяжения: x = 245 / 2450 = 0,1 м.
Ответ: во втором случае пружина растянется на 10 см.
Видео
Из этого видео вы узнаете, как определить жесткость пружины.