Содержание:
Теорема об изменении кинетической энергии:
Для рассмотрения теоремы об изменении кинетической энергии необходимо ввести новое понятие «работа силы» и рассмотреть некоторые простейшие способы ее вычисления.
Работа силы
Работа силы на каком-либо перемещении является одной из основных характеристик, оценивающих действие силы на этом перемещении. Рассмотрим элементарную работу, полную работу и мощность.
Элементарная работа силы
Элементарная работа 

где  — проекция силы
— проекция силы  на направление скорости точки приложения силы или на направление элементарного перемещения, которое считается направленным по скорости точки.
на направление скорости точки приложения силы или на направление элементарного перемещения, которое считается направленным по скорости точки.
Элементарная работа является скалярной величиной. Ее знак определяется знаком проекции силы  , так как перемещение
, так как перемещение  принимаем положительным. При
принимаем положительным. При  элементарная работа
элементарная работа  , а при
, а при  , наоборот,
, наоборот,  . Так как
. Так как  , где
, где  — угол между силой
— угол между силой  и направлением скорости точки
и направлением скорости точки  , то выражение (40) можно представить в виде
, то выражение (40) можно представить в виде

В этой формуле величины  и
и  положительны и знак
положительны и знак  определяется знаком
определяется знаком  . Если — острый угол, то положительна; если тупой угол, то отрицательна.
. Если — острый угол, то положительна; если тупой угол, то отрицательна.
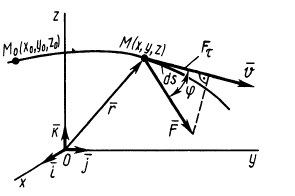
Рис. 60
Итак, элементарная работа силы равна произведению элементарного перемещения на проекцию силы на это перемещение. Отметим частные случаи, которые можно получить из (41):
Таким образом, если сила перпендикулярна элементарному перемещению, то ее элементарная работа равна нулю. В частности, работа нормальной составляющей к скорости силы  всегда равна нулю.
всегда равна нулю.
Приведем другие формулы для вычисления элементарной работы силы. Из кинематики точки известно, что  ;
;  . Следовательно,
. Следовательно,  .
.
После этого, согласно (41), элементарная работа

Элементарная работа силы равна скалярному произведению силы на дифференциал радиуса-вектора точки приложения силы.
Так как  , то, согласно (42),
, то, согласно (42),

Элементарная работа равна скалярному произведению элементарного импульса силы на скорость точки.
Если силу  и радиус-вектор
и радиус-вектор  разложить по осям координат, то
разложить по осям координат, то

Из последней формулы имеем

Подставляя в (42) значения  и
и  , получаем
, получаем

Формулу (44) называют обычно аналитическим выражением элементарной работы. Хотя выражение для элементарной работы (44) по форме и напоминает полный дифференциал функции координат точки, в действительности в общем случае элементарная работа не является полным дифференциалом. Элементарная работа является полным дифференциалом функции координат точки только для специального класса сил — так называемых стационарных потенциальных сил, которые рассмотрены ниже.
Полная работа силы
Для определения полной работы силы на перемещении от точки  до точки
до точки  разобьем это перемещение на
разобьем это перемещение на  перемещений, каждое из которых в пределе переходит в элементарное. Тогда работу
перемещений, каждое из которых в пределе переходит в элементарное. Тогда работу  можно выразить формулой
можно выразить формулой
где  — работа на
— работа на  -м элементарном перемещении, на которые разбито полное перемещение.
-м элементарном перемещении, на которые разбито полное перемещение.
Так как сумма в определении работы является интегральной суммой определения криволинейного интеграла на участке кривой  , то, используя для элементарной работы формулу (40), получаем
, то, используя для элементарной работы формулу (40), получаем

Используя другие выражения для элементарной работы, полную работу силы можно представить также в виде


где момент времени  соответствует точке
соответствует точке  , а момент времени
, а момент времени  — точке
— точке  .
.
Формула (47) особенно удобная для вычисления работы силы, когда сила известна как функция времени. Отметим, что из определения элементарной и полной работы следует:
- работа равнодействующей силы на каком-либо перемещении равна алгебраической сумме работ составляющих сил на том же перемещении;
- работа силы на полном перемещении равна сумме работ этой же силы на составляющих перемещениях, на которые любым образом разбито все перемещение.
Первое свойство, очевидно, достаточно доказать только для элементарной работы равнодействующей силы.
Если сила  является равнодействующей силой системы сил
является равнодействующей силой системы сил  , приложенных к рассматриваемой точке, то она выражается геометрической суммой этих сил. Тогда по определению элементарной работы силы имеем
, приложенных к рассматриваемой точке, то она выражается геометрической суммой этих сил. Тогда по определению элементарной работы силы имеем

Первое свойство доказано.
Второе из отмеченных свойств непосредственно следует из возможности разбиения любым образом полного промежутка интегрирования на составляющие, причем определенный интеграл по полному промежутку интегрирования равен сумме интегралов по составляющим. Единицей полной работы, так же как и элементарной, в СИ является джоуль:  .
.
Если проекция силы на направление скорости  является величиной постоянной, то из (45) получим
является величиной постоянной, то из (45) получим
где  —путь, пройденный точкой.
—путь, пройденный точкой.
Так как  , то последнюю формулу можно представить в виде
, то последнюю формулу можно представить в виде
Следует отметить, что в этой формуле как  , так и
, так и  могут быть переменными, но
могут быть переменными, но  является постоянной величиной. Это выполняется, если и
является постоянной величиной. Это выполняется, если и  постоянны. Если дополнительно угол
постоянны. Если дополнительно угол  или
или  , то тогда
, то тогда
причем эта формула применима как для прямолинейного, так и для криволинейного движения. Для этого необходимо, чтобы сила  была постоянной по модулю и все время направленной по касательной к траектории точки. В случае прямолинейной траектории сила
была постоянной по модулю и все время направленной по касательной к траектории точки. В случае прямолинейной траектории сила  , следовательно, должна быть все время направлена по траектории в одну и ту же сторону.
, следовательно, должна быть все время направлена по траектории в одну и ту же сторону.
Мощность
Мощность силы или работоспособность какого-либо источника силы часто оценивают той работой, которую он может совершить за единицу времени.
Итак, по определению, мощность
Учитывая (43) для элементарной работы, мощность  можно представить в виде
можно представить в виде

Таким образом, мощность равна скалярному произведению силы на скорость точки. Из формулы (48) получаем, что чем больше скорость, тем меньше сила при одной и той же мощности. Следовательно, если от источника силы с заданной мощностью нужно получить большую силу, то ее можно получить только при малой скорости. Так, например, когда железнодорожному локомотиву надо увеличить силу тяги, то для этого надо уменьшить скорость поезда.
В СИ единицей мощности является ватт:  .
.
Примеры вычисления работы силы
Работа силы в общем случае зависит от характера движения точки приложения силы. Следовательно, для вычисления работы надо знать движение этой точки. Но в природе имеются силы и примеры движения, для которых работу можно вычислить сравнительно просто, зная начальное и конечное положение точки.
Рассмотрим работу силы тяжести и линейной силы упругости, изменяющейся по закону Гука, и вычисление работы силы, приложенной к какой-либо точке твердого тела в различных случаях его движения. В качестве простейших примеров движения укажем случаи, когда работа равна нулю. Так, работа любой силы равна нулю, если она приложена все время в неподвижной точке или в точках, скорость которых равна нулю, как, например, в случае, когда сила все время приложена в мгновенном центре скоростей при плоском движении тела или все время в точках, лежащих на мгновенной оси вращения, в случае вращения тела вокруг неподвижной точки. Эти случаи возможны в задачах, когда рассматривают работу силы трения в точке соприкосновения двух тел при отсутствии скольжения одного тела по другому. При этом работа силы трения равна нулю.
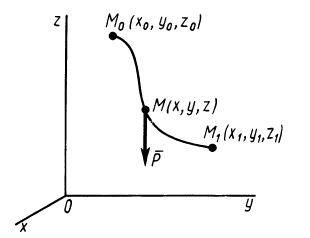
Рис. 61
Работа силы тяжести
Силу тяжести  материальной точки массой
материальной точки массой  вблизи поверхности Земли можно считать постоянной, равной
вблизи поверхности Земли можно считать постоянной, равной  , направленной по вертикали вниз. Если взять оси координат
, направленной по вертикали вниз. Если взять оси координат  , у которых ось
, у которых ось  направлена по вертикали вверх (рис. 61), то
направлена по вертикали вверх (рис. 61), то

Вычисляя работу  силы на перемещении от точки
силы на перемещении от точки  до точки
до точки  по формуле (46), имеем
по формуле (46), имеем
или

где  — высота опускания точки.
— высота опускания точки.
При подъеме точки высота  является отрицательной. Следовательно, в общем случае работа силы тяжести
является отрицательной. Следовательно, в общем случае работа силы тяжести  равна
равна

Работа силы тяжести равна произведению этой силы на высоту опускания (работа положительна) или высоту подъема (работа отрицательна). Из формулы (50) следует, что работа силы тяжести не зависит от формы траектории между точками  и
и  , и если эти точки совпадают, то работа силы тяжести равна нулю (случай замкнутого пути). Она равна нулю, если точки и лежат в одной и той же горизонтальной плоскости.
, и если эти точки совпадают, то работа силы тяжести равна нулю (случай замкнутого пути). Она равна нулю, если точки и лежат в одной и той же горизонтальной плоскости.
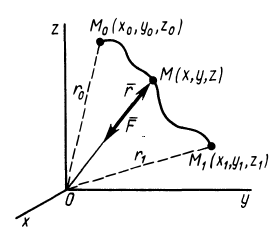
Рис. 62
Если имеем систему  материальных точек, то для каждой точки с массой
материальных точек, то для каждой точки с массой  будем иметь работу ее силы тяжести
будем иметь работу ее силы тяжести

где  и
и  — начальная и конечная координаты точки.
— начальная и конечная координаты точки.
Работа всех сил тяжести системы материальных точек

так как

где  — масса системы точек;
— масса системы точек;  и
и  — начальная и конечная координаты центра масс системы точек. Вводя обозначение для изменения высоты центра масс
— начальная и конечная координаты центра масс системы точек. Вводя обозначение для изменения высоты центра масс  , имеем
, имеем

Из (50′) следует, что для перемещений точек системы, при которых  , работа сил тяжести
, работа сил тяжести  .
.
Работа линейной силы упругости
Линейной силой упругости (или линейной восстанавливающей силой) называют силу, действующую по закону Гука (рис. 62):
где  — расстояние от точки равновесия, где сила равна нулю, до рассматриваемой точки
— расстояние от точки равновесия, где сила равна нулю, до рассматриваемой точки  ;
;  —постоянный коэффициент жесткости.
—постоянный коэффициент жесткости.
Выберем начало координат в точке равновесия  , тогда
, тогда

После этого работу на перемещении от точки  до точки
до точки  определим по формуле
определим по формуле
так как

где  .
.
Выполняя интегрирование, получаем

По этой формуле вычисляют работу линейной силы упругости пружины при перемещении по любому пути из точки , в которой ее удлинение (начальная деформация) равно  , в точку , где деформация соответственно равна
, в точку , где деформация соответственно равна  . В новых обозначениях (51) принимает вид
. В новых обозначениях (51) принимает вид

При перемещении из положения равновесия (пружина не деформирована), где  , в любое положение с деформацией
, в любое положение с деформацией  работа линейной силы упругости
работа линейной силы упругости

Работа линейной силы упругости на перемещении из состояния равновесия всегда отрицательна и равна половине произведения коэффициента жесткости на квадрат деформации. Из формулы (51) или (52) следует, что работа линейной силы упругости не зависит от формы перемещения и работа по любому замкнутому перемещению равна нулю. Она также равна нулю, если точки и лежат на одной сфере, описанной из точки равновесия.
Работа силы, приложенной к твердому телу
Получим формулы для вычисления элементарной и полной работы силы, приложенной в какой-либо точке твердого тела, которое совершает то или иное движение. Сначала рассмотрим поступательное и вращательное движения тела, а затем общий случай движения твердого тела.
При поступательном движении твердого тела все точки тела имеют одинаковые по модулю и направлению скорости (рис. 63). Следовательно, если сила  приложена к точке
приложена к точке  , то, так как
, то, так как  ,
,

где  —радиус-вектор произвольной точки твердого тела.
—радиус-вектор произвольной точки твердого тела.
На каком-либо перемещении полная работа

При вращении твердого тела вокруг неподвижной оси скорость точки  можно вычислить по векторной формуле Эйлера (рис. 64):
можно вычислить по векторной формуле Эйлера (рис. 64):
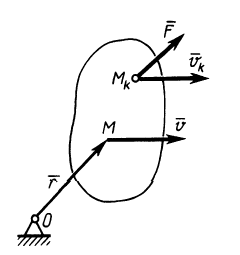
Рис. 63
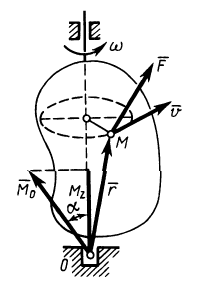
Рис. 64
тогда элементарную работу силы  определим по формуле
определим по формуле

В смешанном векторном произведении, которое выражается в виде определителя, можно переставлять сомножители в круговом порядке:

и

так как

является моментом силы относительно точки  .
.
Учитывая, что  — момент силы относительно оси вращения
— момент силы относительно оси вращения  и
и  , окончательно получаем
, окончательно получаем

Таким образом, элементарная работа силы, приложенной к какой-либо точке тела, вращающегося вокруг неподвижной оси, равна произведению момента силы относительно оси вращения на дифференциал угла поворота тела.
Полная работа

В частном случае, если момент силы относительно оси вращения является постоянным, т. е.  , работу определяют по формуле
, работу определяют по формуле

где  — угол поворота тела, на котором вычисляют работу силы.
— угол поворота тела, на котором вычисляют работу силы.
Так как  , то мощность в случае вращения твердого тела вокруг неподвижной оси
, то мощность в случае вращения твердого тела вокруг неподвижной оси

Мощность силы, приложенной к вращающемуся вокруг неподвижной оси твердому телу, равна произведению угловой скорости тела на момент силы относительно оси вращения . тела.
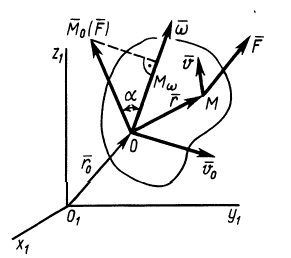
Рис. 65
Для свободного тела в общем случае движения скорость точки  , в которой приложена сила
, в которой приложена сила  (рис. 65),
(рис. 65),

следовательно,

Учитывая, что

имеем

Но так как  — момент силы относительно мгновенной оси относительного вращения вокруг точки
— момент силы относительно мгновенной оси относительного вращения вокруг точки  ,
,  — элементарный угол поворота вокруг этой оси, то окончательно получаем
— элементарный угол поворота вокруг этой оси, то окончательно получаем

Таким образом, элементарная работа силы, приложенной в какой-либо точке твердого тела, в общем случае движения складывается из элементарной работы на элементарном поступательном перемещении вместе с какой-либо точкой тела и на элементарном вращательном перемещении вокруг этой точки.
В случае вращения твердого тела вокруг неподвижной точки, выбрав эту точку за полюс , по (59) для элементарной работы имеем

Поворот на угол  следует рассматривать в каждый момент времени вокруг своей мгновенной оси вращения.
следует рассматривать в каждый момент времени вокруг своей мгновенной оси вращения.
Формулу (59) применяют и для плоского движения твердого тела, только в этом случае мгновенная ось относительного вращения перпендикулярна плоскости движения и проходит через произвольную точку тела.
При действии на твердое тело системы сил 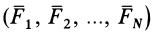 для элементарной работы силы
для элементарной работы силы  , согласно полученным формулам, имеем
, согласно полученным формулам, имеем

Элементарная работа системы сил

где

соответственно являются главным вектором и главными моментами системы сил относительно точки и мгновенной оси относительного вращения, проходящей через точку полюс. Таким образом,

т. е. элементарная работа системы сил, приложенных к свободному твердому телу в общем случае его движения, складывается из элементарной работы главного вектора системы сил на элементарном поступательном перемещении вместе с какой-либо точкой тела и элементарной работы главного момента этих сил относительно выбранной точки на элементарном вращательном перемещении вокруг этой точки.
Работа внутренних сил твердого тела
Докажем, что для твердого тела сумма работ внутренних сил равна нулю при любом его перемещении. Очевидно, достаточно доказать, что сумма элементарных работ всех внутренних сил равна нулю. Рассмотрим две любые точки твердого тела:  и
и  (рис. 66). Так как внутренние силы есть силы взаимодействия точек тела, то для этих двух точек
(рис. 66). Так как внутренние силы есть силы взаимодействия точек тела, то для этих двух точек

Введем единичный вектор  , направленный по силе
, направленный по силе  . Тогда
. Тогда

Сумма элементарных работ сил  и
и 

Рис. 66
Раскрывая скалярные произведения векторов в скобках, получаем

так как в кинематике твердого тела доказано, что проекции скоростей любых двух точек твердого тела на направление прямой линии, соединяющей эти точки, равны друг другу при любом движении твердого тела. В полученном выражении в скобках стоит разность этих проекций скоростей двух точек, т. е. величина, равная нулю.
Твердое тело можно считать состоящим из пар взаимодействующих точек, для каждой из которых сумма элементарных работ внутренних сил равна нулю.
Суммируя элементарные работы для всех пар точек, получаем  .
.
Как уже известно, главный вектор и главный момент всех внутренних сил для любой механической системы равны нулю. Сумма работ внутренних сил равна нулю только в случае твердого тела, а для любой механической системы в общем случае она не равна нулю.
В задачах в качестве механической системы часто рассматривают систему сочлененных твердых тел. При вычислении работы всех сил, приложенных к такой системе тел, очевидно, достаточно учесть работу внутренних сил в местах сочленения твердых тел. Если твердые тела сочленяются с помощью шарниров без трения, сумма работ таких двух внутренних сил равна нулю, так как внутренние силы в точке сочленения, как действие и противодействие, равны по модулю, но противоположны по направлению, а перемещение у точек приложения сил общее.
Таким образом, сочленение твердых тел с помощью шарниров без трения при вычислении работы внутренних сил не нарушает жесткости системы тел, так как сумма работ внутренних сил в этих шарнирах равна нулю при любых перемещениях системы сочлененных твердых тел. Систему сочлененных с помощью таких шарниров твердых тел при вычислении работы всех внутренних сил можно считать одним твердым телом. Это характерно и для случая сочленения системы твердых тел с помощью нерастяжимых нитей, канатов и т. п. В этом случае работа внутренних сил натяжений также равна нулю.
Кинетическая энергия
Кинетическая энергия точки и системы: Кинетической энергией материальной точки называют половину произведения массы точки на квадрат ее скорости, т.е.  или
или  , так как скалярный квадрат любого вектора равен квадрату модуля этого вектора. Кинетическая энергия является скалярной положительной величиной. В СИ единицей кинетической энергии является джоуль:
, так как скалярный квадрат любого вектора равен квадрату модуля этого вектора. Кинетическая энергия является скалярной положительной величиной. В СИ единицей кинетической энергии является джоуль:  .
.
Кинетической энергией системы  называют сумму кинетических энергий всех точек механической системы, т. е.
называют сумму кинетических энергий всех точек механической системы, т. е.

Кинетическая энергия как точки, так и системы не зависит от направления скоростей точек. Кинетическая энергия может быть равна нулю для системы только при условии, если все точки системы находятся в покое.
Вычисление кинетической энергии системы (теорема Кёнига)
Разложим движение механической системы на переносное поступательное вместе с центром масс системы и относительное по отношению к системе координат, движущейся поступательно вместе с центром масс. Аналогично тому, как это производилось при выводе формулы для кинетического момента при таком разложении абсолютного движения, для каждой точки системы  (см. рис. 57) имеем
(см. рис. 57) имеем
и соответственно
где  является относительной скоростью точки, так как подвижная система координат движется поступательно
является относительной скоростью точки, так как подвижная система координат движется поступательно  и, следовательно, полная производная по времени от
и, следовательно, полная производная по времени от  совпадает с локальной производной, равной относительной скорости точки.
совпадает с локальной производной, равной относительной скорости точки.
Подставляя значение скорости  в выражение кинетической энергии абсолютного движения системы, т. е. ее движения относительно системы координат
в выражение кинетической энергии абсолютного движения системы, т. е. ее движения относительно системы координат  , после очевидных преобразований получаем
, после очевидных преобразований получаем

Но

так как

Учитывая, что  —масса системы, и обозначая
—масса системы, и обозначая  второе слагаемое в (62), имеем
второе слагаемое в (62), имеем

где
Величина  является кинетической энергией относительного движения системы относительно системы координат, движущейся поступательно вместе с ее центром масс, или кинетической энергией системы относительно центра масс.
является кинетической энергией относительного движения системы относительно системы координат, движущейся поступательно вместе с ее центром масс, или кинетической энергией системы относительно центра масс.
Формула (63) выражает так называемую теорему Кёнига: кинетическая энергия системы в абсолютном движении складывается из кинетической энергии центра масс, если в нем сосредоточить всю массу системы, и кинетической энергии системы относительно центра масс.
Кинетическая энергия твердого тела
При поступательном движении твердого тела кинетическая энергия

так как при поступательном движении твердого тела скорости всех точек тела одинаковы, т. е.  , где
, где  — общая скорость для всех точек тела.
— общая скорость для всех точек тела.
Таким образом, кинетическая энергия твердого тела при поступательном движении вычисляется так же, как и для одной точки, у которой масса равна массе всего тела.
При вращении тела вокруг неподвижной оси кинетическую энергию можно вычислить, если учесть, что скорость какой-либо точки тела  можно выразить (см. рис. 50) как
можно выразить (см. рис. 50) как
где  — кратчайшее расстояние от точки до оси вращения;
— кратчайшее расстояние от точки до оси вращения;  — угловая скорость тела.
— угловая скорость тела.
Тогда
или

где  — момент инерции тела относительно оси вращения
— момент инерции тела относительно оси вращения  .
.
Следовательно, кинетическая энергия тела при вращательном движении вокруг неподвижной оси равна половине произведения момента инерции тела относительно оси вращения на квадрат угловой скорости тела.
Из сравнения (64) и (65) следует, что эти формулы подобны, только при вращательном движении аналогом массы является момент инерции тела относительно оси вращения, а скорости— угловая скорость тела. Такая аналогия между поступательным и вращательным движениями твердого тела может наблюдаться во многих формулах, относящихся к этим двум движениям.
При плоском движении твердого тела кинетическую энергию можно вычислить по теореме Кёнига. Так как в этом случае относительное движение относительно центра масс (точнее, относительно системы координат, движущейся поступательно вместе с центром масс) является вращением вокруг центра масс с угловой скоростью  , то
, то
где  — момент инерции тела относительно оси
— момент инерции тела относительно оси  , проходящей через центр масс тела перпендикулярно плоскости движения. Следовательно, на основании (63) для плоского движения тела имеем
, проходящей через центр масс тела перпендикулярно плоскости движения. Следовательно, на основании (63) для плоского движения тела имеем

Таким образом, при плоском движении тела кинетическая энергия складывается из кинетической энергии поступательного движения тела вместе с центром масс и кинетической энергии от вращения вокруг оси, проходящей через центр масс и перпендикулярной плоскости движения.
Учитывая, что  (
( — мгновенный центр скоростей), из (66), используя теорему Штейнера, получаем еще одну формулу для кинетической энергии твердого тела при плоском движении:
— мгновенный центр скоростей), из (66), используя теорему Штейнера, получаем еще одну формулу для кинетической энергии твердого тела при плоском движении:

где  — момент инерции тела относительно оси
— момент инерции тела относительно оси  , проходящей через мгновенный центр скоростей перпендикулярно плоскости движения,
, проходящей через мгновенный центр скоростей перпендикулярно плоскости движения,
Если механическая система состоит из нескольких твердых тел, то следует вычислить кинетическую энергию каждого тела, а затем полученные кинетические энергии сложить. Так определяется кинетическая энергия системы тел.
Теорема об изменении кинетической энергии точки
Для материальной точки массой  , движущейся под действием силы
, движущейся под действием силы  , основной закон динамики можно представить в виде
, основной закон динамики можно представить в виде
Умножая обе части этого соотношения скалярно на дифференциал радиуса-вектора точки  , имеем
, имеем
или
где  — скорость точки.
— скорость точки.
Учитывая, что  — элементарная работа, получаем
— элементарная работа, получаем
Так как

то окончательно

Формула (67) выражает теорему об изменении кинетической энергии для точки в дифференциальной форме: дифференциал кинетической энергии точки равен элементарной работе силы, действующей на точку.
Если обе части (67) разделить на  и учесть, что
и учесть, что  —мощность, то теорему можно также выразить в виде
—мощность, то теорему можно также выразить в виде

Производная по времени от кинетической энергии точки равна мощности, подводимой к этой точке.
Интегрируя обе части (67) от точки  до точки
до точки  (см. рис. 60), получаем теорему об изменении кинетической энергии точки в конечной форме:
(см. рис. 60), получаем теорему об изменении кинетической энергии точки в конечной форме:

т. е. изменение кинетической энергии точки на каком-либо перемещении равно работе силы, действующей на точку на том же перемещении.
- Заказать решение задач по теоретической механике
Пример 1. Тело, имеющее силу тяжести  , падает без начальной скорости на пружину с высоты
, падает без начальной скорости на пружину с высоты  . Определить наибольшее обжатие пружины
. Определить наибольшее обжатие пружины  , если статическое сжатие ее под действием силы тяжести этого тела равно
, если статическое сжатие ее под действием силы тяжести этого тела равно  . Массой пружины пренебречь (рис. 67).
. Массой пружины пренебречь (рис. 67).
Решение. Применим к движению тела теорему об изменении кинетической энергии точки

приняв за начальное положение тела начало его падения с высоты , а за конечное — момент максимального обжатия пружины. Изменение кинетической энергии за этот промежуток времени равно нулю, так как  и при наибольшем сжатии пружины
и при наибольшем сжатии пружины  . Следовательно, работа
. Следовательно, работа  . На тело после его соприкосновения с пружиной действуют две силы: сила тяжести тела
. На тело после его соприкосновения с пружиной действуют две силы: сила тяжести тела  и сила упругости пружины. Сила
и сила упругости пружины. Сила  совершает работу на перемещении
совершает работу на перемещении  , сила упругости — на перемещении
, сила упругости — на перемещении  . Следовательно,
. Следовательно,
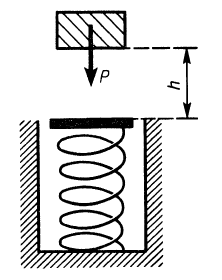
Рис. 67
Но так как в положении статического равновесия  , то
, то  . Поэтому
. Поэтому 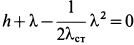 или
или
Решая это квадратное уравнение, имеем

Знак плюс перед корнем выбран потому, что  . При
. При  наибольшее обжатие пружины
наибольшее обжатие пружины  , т. е. при динамическом действии груза на пружину ее наибольшее обжатие в два раза больше статического обжатия.
, т. е. при динамическом действии груза на пружину ее наибольшее обжатие в два раза больше статического обжатия.
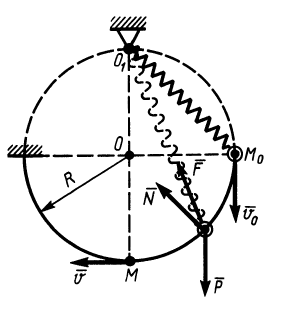
Рис. 68
Пример 2. Грузу с силой тяжести  , подвешенному в точке
, подвешенному в точке  на пружине, статическое удлинение которой под действием силы тяжести
на пружине, статическое удлинение которой под действием силы тяжести  равно
равно  , сообщена начальная скорость
, сообщена начальная скорость  из положения
из положения  вертикально вниз (рис. 68).
вертикально вниз (рис. 68).
Определить скорость груза в положении  , если груз, принимаемый за точку, скользит по кольцу радиусом
, если груз, принимаемый за точку, скользит по кольцу радиусом  без трения,
без трения,  и естественная длина пружины равна .
и естественная длина пружины равна .
Решение. Применим к движению груза теорему об изменении кинетической энергии, приняв за начальное положение груза и конечное — . Получим
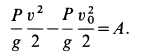
Работу совершают сила тяжести груза и сила упругости пружины. Нормальная реакция кольца  все время перпендикулярна перемещению, и ее работа равна нулю. Следовательно,
все время перпендикулярна перемещению, и ее работа равна нулю. Следовательно,

В рассматриваемом случае

поэтому

По теореме об изменении кинетической энергии имеем
и
Теорема об изменении кинетической энергии системы
Приложив к точкам системы все внешние и внутренние силы, для каждой точки системы можно выразить теорему об изменении кинетической энергии (67) в форме

Суммируя правые и левые части этих соотношений по всем точкам системы и вынося знак дифференциала за знак суммы, получаем

или

где кинетическая энергия системы
элементарная работа внешних и внутренних сил соответственно будет

Формула (69) и выражает теорему об изменении кинетической энергии системы в дифференциальной форме: дифференциал от кинетической энергии системы равен сумме элементарных работ всех внешних и внутренних сил, действующих на систему.
Если обе части (69) проинтегрировать между двумя положениями системы — начальным и конечным, в которых соответственно кинетическая энергия  и
и  , то, изменяя порядок суммирования и интегрирования, имеем
, то, изменяя порядок суммирования и интегрирования, имеем
или

где  —работа внешней силы для точки системы
—работа внешней силы для точки системы  при ее перемещении из начального положения
при ее перемещении из начального положения  в конечное положение
в конечное положение  — соответственно работа внутренней силы, действующей на точку
— соответственно работа внутренней силы, действующей на точку  .
.
Формула (70) выражает теорему об изменении кинетической энергии системы в конечной или интегральной форме: изменение кинетической энергии системы при ее перемещении из одного положения в другое равно сумме работ всех внешних и внутренних сил, действующих на систему, на соответствующих перемещениях точек системы при том же перемещении системы.
Частный случай: Для абсолютно твердого тела сумма работ всех внутренних сил системы равна нулю:
Следовательно, теорему об изменении кинетической энергии, например, в конечной форме можно представить в виде

Изменение кинетической энергии твердого тела при каком-либо перемещении равно сумме работ всех внешних сил, действующих на тело, на соответствующих перемещениях точек тела при том же перемещении твердого тела.
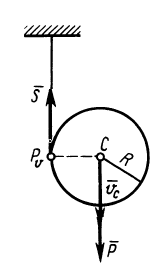
Рис. 69
Таким образом, в отличие от рассмотренных других общих теорем динамики системы в теорему об изменении кинетической энергии могут входить внутренние силы. Они не входят в эту теорему в случае абсолютно твердого тела.
Пример 1. В маятнике Максвелла однородный цилиндр силой тяжести  и радиусом
и радиусом  падает вниз без начальной скорости, разматывая нить, намотанную на цилиндр в его среднем сечении.
падает вниз без начальной скорости, разматывая нить, намотанную на цилиндр в его среднем сечении.
Определить скорость оси цилиндра в зависимости от высоты ее опускания  (рис. 69).
(рис. 69).
Решение. По теореме об изменении кинетической энергии цилиндра как твердого тела имеем
Так как в начальный момент времени цилиндр покоится, то  . Цилиндр совершает плоское движение. Его кинетическая энергия в момент достижения высоты
. Цилиндр совершает плоское движение. Его кинетическая энергия в момент достижения высоты 

Поэтому
Внешними силами являются сила тяжести и сила натяжения нити  . Сила
. Сила  все время приложена в мгновенном центре скоростей цилиндра, имеющем скорость равную нулю. Работа силы тоже равна нулю. Следовательно,
все время приложена в мгновенном центре скоростей цилиндра, имеющем скорость равную нулю. Работа силы тоже равна нулю. Следовательно,
Подставляя вычисленные величины в теорему об изменении кинетической энергии, получаем
Пример 2. Груз  , имеющий силу тяжести
, имеющий силу тяжести  , с помощью нити, переброшенной через блок
, с помощью нити, переброшенной через блок  , приводит в движение каток
, приводит в движение каток  , катящийся без скольжения по горизонтальной плоскости (рис. 70). Блок
, катящийся без скольжения по горизонтальной плоскости (рис. 70). Блок  и каток
и каток  — однородные диски радиусом
— однородные диски радиусом  . Их силы тяжести равны . Коэффициент трения качения катка
. Их силы тяжести равны . Коэффициент трения качения катка  . Трением в осях катка и блока, а также массой нити пренебречь.
. Трением в осях катка и блока, а также массой нити пренебречь.
Определить скорость груза  в зависимости от его высоты опускания.
в зависимости от его высоты опускания.
В начальный момент система покоится.
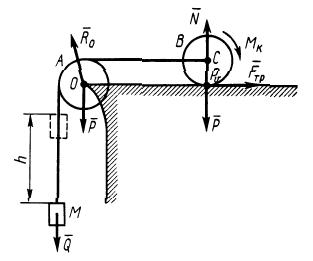
Рис. 70
Решение. По теореме об изменении кинетической энергии системы, состоящей из груза, нити, блока и катка, имеем

где  , так как вначале система покоилась. Обозначив
, так как вначале система покоилась. Обозначив  ,
,  и
и  кинетические энергии груза, блока и катка соответственно после опускания груза на высоту
кинетические энергии груза, блока и катка соответственно после опускания груза на высоту  , получаем
, получаем

Но

Следовательно,

Так как работа внутренних сил натяжений нити равна нулю, то вообще  для всей системы твердых тел, соединенных нитью. Работа сил тяжести блока и реакции оси
для всей системы твердых тел, соединенных нитью. Работа сил тяжести блока и реакции оси  равны нулю, так как эти силы приложены в неподвижной точке
равны нулю, так как эти силы приложены в неподвижной точке  . Сила тяжести катка
. Сила тяжести катка  перпендикулярна перемещению, а силы
перпендикулярна перемещению, а силы  и
и  приложены в мгновенном центре скоростей и, следовательно, работа их равна нулю. Работу производят сила
приложены в мгновенном центре скоростей и, следовательно, работа их равна нулю. Работу производят сила  и пара сил с моментом
и пара сил с моментом  , препятствующим качению катка по плоскости. Имеем
, препятствующим качению катка по плоскости. Имеем
где  — угол поворота катка при опускании груза
— угол поворота катка при опускании груза  на
на  и
и  .
.
Так как

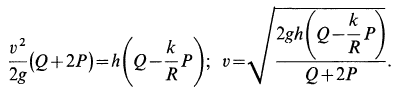
то
Подставляя значения полученных величин в теорему об изменении кинетической энергии, получаем
Заметим, что груз имеет не только силу тяжести , совершающую работу, но он еще обладает массой  и, следовательно, имеет кинетическую энергию. И работа силы тяжести, и кинетическая энергия груза входят в теорему об изменении кинетической энергии.
и, следовательно, имеет кинетическую энергию. И работа силы тяжести, и кинетическая энергия груза входят в теорему об изменении кинетической энергии.
Теорема об изменении кинетической энергии в относительном движении
Теорема об изменении кинетической энергии материальной точки. Пусть точка  совершает переносное движение вместе с подвижной системой координат
совершает переносное движение вместе с подвижной системой координат  относительно основной системы координат
относительно основной системы координат  и относительное движение по отношению к системе координат
и относительное движение по отношению к системе координат  (рис. 71). Абсолютным движением точки
(рис. 71). Абсолютным движением точки  является ее сложное движение относительно системы координат . Дифференциальное уравнение относительного движения точки в векторной форме можно представить в виде
является ее сложное движение относительно системы координат . Дифференциальное уравнение относительного движения точки в векторной форме можно представить в виде

где  — сила инерции переносного движения точки;
— сила инерции переносного движения точки;  — сила инерции Кориолиса.
— сила инерции Кориолиса.
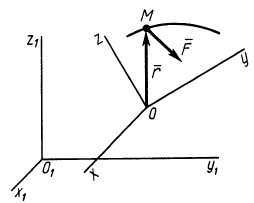
Рис. 71
Вывод теоремы об изменении кинетической энергии для точки в относительном движении произведем так же, как и вывод аналогичной теоремы в абсолютном движении, умножив обе части (72) скалярно на вектор элементарного относительного перемещения  , и преобразуем левую часть полученного выражения. Значок
, и преобразуем левую часть полученного выражения. Значок  над дифференциалом радиуса-вектора
над дифференциалом радиуса-вектора  и других векторов указывает, что при дифференцировании надо брать изменение соответствующего вектора относительно подвижной системы координат
и других векторов указывает, что при дифференцировании надо брать изменение соответствующего вектора относительно подвижной системы координат  . Таким образом,
. Таким образом,

В правую часть входят элементарные работы сил  и
и  на относительном перемещении . Оказывается, что элементарная работа силы инерции Кориолиса на относительном элементарном перемещении всегда равна нулю, так как эта сила перпендикулярна относительной скорости
на относительном перемещении . Оказывается, что элементарная работа силы инерции Кориолиса на относительном элементарном перемещении всегда равна нулю, так как эта сила перпендикулярна относительной скорости  и, следовательно, перпендикулярна относительному перемещению
и, следовательно, перпендикулярна относительному перемещению  . В выражение силы инерции Кориолиса входит векторное произведение
. В выражение силы инерции Кориолиса входит векторное произведение  , а оно всегда перпендикулярно каждому из векторов сомножителей, в частности
, а оно всегда перпендикулярно каждому из векторов сомножителей, в частности  .
.
Итак, теорема об изменении кинетической энергии точки в дифференциальной форме имеет вид

Теорема об изменении кинетической энергии в относительном движении точки выражается так же, как и в абсолютном движении, только к элементарной работе приложенной силы добавляют элементарную работу силы инерции переносного движения на относительном перемещении.
Теорема об изменении кинетической энергии системы
Для системы рассмотрим наиболее важный случай, когда в качестве переносного движения берется поступательное движение системы вместе с центром масс и, следовательно, кинетическую энергию системы в абсолютном движении можно вычислить на основании теоремы Кёнига (63):  .
.
Теорему об изменении кинетической энергии системы для абсолютного движения (см. рис. 56) можно представить в виде

Так как
и, следовательно,
то, заменяя в (74)  и
и  их значениями, получаем
их значениями, получаем

По свойству внутренних сил,  .
.
Если теорему об изменении кинетической энергии для центра масс выразить так же, как и для точки, у которой масса равна массе всей системы, и эта точка находится под действием всех внешних сил, действующих на систему, то
Отбросив в (75) эти члены, получим следующую теорему об изменении кинетической энергии системы в относительном движении по отношению к системе координат, движущейся поступательно вместе с центром масс:

Сравнивая (76) с (74), видим, что теорема об изменении кинетической энергии в относительном движении системы по отношению к системе координат, движущейся поступательно вместе с центром масс системы, формулируется так же, как и для абсолютного движения системы.
- Потенциальное силовое поле
- Закон сохранения механической энергии
- Принцип Даламбера
- Динамические реакции при вращении твердого тела вокруг неподвижной оси
- Свойства внутренних сил системы
- Дифференциальное уравнение движения системы
- Теоремы об изменении количества движения и о движении центра масс
- Теорема об изменении кинетического момента
|
Физическое понятие «энергия» |
Физическая величина, введённая в физике для характеристики способности тела совершать работу |
|
Полная механическая энергия тела как функция механического состояния системы (скалярная величина) |
Зависит от положения и скорости тела, т. е. определяется как сумма его кинетической и потенциальной энергий |
| Два вида сил |
1) При введении физического понятия «потенциальная энергия» признаком классификации сил является зависимость работы этих сил от а) формы траектории и б) последовательности перемещения тел из начальных положений в конечные. 2) Если работа сил не зависит от пунктов а) и б), то такие силы называются потенциальными (например, сила тяжести, сила упругости). Соответствующие этим силам поля называются потенциальными. 3) Если работа сил зависит от пунктов а) и б) — силы называются непотенциальными (например, сила трения скольжения) |
|
Потенциальная энергия (скалярная величина) |
1) Энергия взаимодействия тел или частей внутри тела. 2) Работа потенциальных сил со знаком «(-)» определяет изменение потенциальной энергии: (A_{потенц. сил} = -Delta E_п). ((1)) 3) Физический смысл имеет изменение потенциальной энергии: при решении задач выбор точки (нулевого уровня), где (E_п = 0), является произвольным. 4) Потенциальная энергия взаимодействия тела массой (m) на высоте (h) от горизонтального уровня Земли: (E_п = mgh). ((2)) 5) Потенциальная энергия упруго деформированного тела (сжатого или растянутого на величину (Delta l) с пружиной жёсткостью (k)): (E_п = frac{kDelta l^2}{2}) ((3)) |
|
Кинетическая энергия (скалярная величина) |
1) Работа силы или равнодействующей всех сил (механическая работа) определяет изменение кинетической энергии тела (теорема о кинетической энергии): (A_{sumlimits_{i = 1}^{N}vec{F}_i} = sumlimits_{i = 1}^{N}vec{F}_i · Deltavec{r} = Delta E_k = frac{mv^2}{2} — frac{mv_0^2}{2},) ((4)) где (N) — все силы (vec{F}_1, vec{F}_2… vec{F}_N), действующие на тело. 2) Взаимосвязь кинетической энергии и импульса: (E_k = frac{mv^2}{2} = frac{(mv)^2}{2m} = frac{p^2}{2m}) ((5)) |
| Закон изменения полной механической энергии |
Работа всех непотенциальных сил изменяет механическую энергию: (E_2 — E_1 = A_{непотенц}), ((6)) где (E_1 = E_{k1} + E_{п1}) и (E_2 =E_{k2} + E_{п2} ) — полные механические энергии системы в механических состояниях (1) и (2) |
| Закон сохранения полной механической энергии |
При отсутствии в механической системе непотенциальных сил или равенстве нулю работы этих сил механическая энергия системы сохраняется: (E_2 = E_1). ((7)) Физические системы, в которых сохраняется полная механическая энергия, называются консервативными |
Энергия.
-
Работа.
-
Мощность.
-
Механическая энергия.
-
Кинетическая энергия.
-
Потенциальная энергия тела вблизи поверхности Земли.
-
Потенциальна яэнергия деформированной пружины.
-
Закон сохранения механической энергии.
-
Закон изменения механической энергии.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: работа силы, мощность, кинетическая энергия, потенциальная энергия, закон сохранения механической энергии.
Мы приступаем к изучению энергии — фундаментального физического понятия. Но предварительно нужно разобраться с другой физической величиной — работой силы.
к оглавлению ▴
Работа.
Пусть на тело действует постоянная сила  и тело, двигаясь прямолинейно по горизонтальной поерхности, совершило перемещение
и тело, двигаясь прямолинейно по горизонтальной поерхности, совершило перемещение  . Сила не обязательно является непосредственной причиной перемещения (так, сила тяжести не является непосредственной причиной перемещения шкафа, который передвигают по комнате).
. Сила не обязательно является непосредственной причиной перемещения (так, сила тяжести не является непосредственной причиной перемещения шкафа, который передвигают по комнате).
Предположим сначала, что векторы силы и перемещения сонаправлены (рис. 1; остальные силы, действующие на тело, не указаны)
 |
| Рис. 1.A=Fs |
В этом простейшем случае работа  определяется как произведение модуля силы на модуль перемещения:
определяется как произведение модуля силы на модуль перемещения:
 . (1)
. (1)
Единицей измерения работы служит джоуль (Дж): Дж=Н  м. Таким образом, если под действием силы 1 Н тело перемещается на 1 м, то сила совершает работу 1 Дж.
м. Таким образом, если под действием силы 1 Н тело перемещается на 1 м, то сила совершает работу 1 Дж.
Работа силы, перпендикулярной перемещению, по определению считается равной нулю. Так, в данном случае сила тяжести и сила реакции опоры не совершают работы.
Пусть теперь вектор силы образует с вектором перемещения острый угол  (рис. 2).
(рис. 2).
Разложим силу на две составляющие:  (параллельную перемещению) и
(параллельную перемещению) и  (перпендикулярную перемещению). Работу совершает только . Поэтому для работы силы получаем:
(перпендикулярную перемещению). Работу совершает только . Поэтому для работы силы получаем:
 . Итак,
. Итак,
 . (2)
. (2)
Если вектор силы образует с вектором перемещения тупой угол , то работа по-прежнему определяется формулой (2). В этом случае работа оказывается отрицательной.
Например, работа силы трения скольжения, действующей на тело в рассмотренных ситуациях, будет отрицательной, так как сила трения направлена противоположно перемещению. В этом случае имеем:
 , и для работы силы трения получаем:
, и для работы силы трения получаем:
 ,
,
где  — масса тела,
— масса тела, — коэффициент трения между телом и опорой.
— коэффициент трения между телом и опорой.
Соотношение (2) означает, что работа является скалярным произведением векторов силы и перемещения:
 .
.
Это позволяет вычислять работу через координаты данных векторов:
 .
.
Пусть на тело действуют несколько сил  и — равнодействующая этих сил. Для работы силы имеем:
и — равнодействующая этих сил. Для работы силы имеем:
vec s=vec F_{1}vec s+vec F_{2}vec s+...+vec F_{n}vec s") ,
,
или
 ,
,
где  — работы сил
— работы сил  . Итак, работа равнодействующей приложенных к телу сил равна сумме работ каждой силы в отдельности.
. Итак, работа равнодействующей приложенных к телу сил равна сумме работ каждой силы в отдельности.
к оглавлению ▴
Мощность.
Часто имеет значение быстрота, с которой совершается работа. Скажем, на практике важно знать, какую работу сможет выполнить данное устройство за фиксированное время.
Мощность — это величина, характеризующая скорость совершения работы. Мощность  есть отношение работы ко времени
есть отношение работы ко времени  , за которое эта работа совершена:
, за которое эта работа совершена:
 .
.
Мощность измеряется в ваттах (Вт). 1 Вт = 1 Дж/с, то есть 1 Вт — это такая мощность, при которой работа в 1 Дж совершается за 1 с.
Предположим, что силы, действующие на тело, уравновешены, и тело движется равномерно и прямолинейно со скоростью  . В этом случае существует полезная формула для мощности, развиваемой одной из действующих сил .
. В этом случае существует полезная формула для мощности, развиваемой одной из действующих сил .
За время тело совершит перемещение  . Работа силы будет равна:
. Работа силы будет равна:
 .
.
Отсюда получаем мощность:
 ,
,
или
 ,
,
где  -угол между векторами силы и скорости.
-угол между векторами силы и скорости.
Наиболее часто эта формула используется в ситуации, когда — сила «тяги» двигателя автомобиля (которая на самом деле есть сила трения ведущих колёс о дорогу). В этом случае  , и мы получаем просто:
, и мы получаем просто:
 .
.
к оглавлению ▴
Механическая энергия.
Энергия является мерой движения и взаимодействия любых объектов в природе. Имеются различные формы энергии: механическая, тепловая, электромагнитная, ядерная. . .
Опыт показывает, что энергия не появляется ниоткуда и не исчезает бесследно, она лишь переходит из одной формы в другую. Это самая общая формулировка закона сохранения энергии.
Каждый вид энергии представляет собой некоторое математическое выражение. Закон сохранения энергии означает, что в каждом явлении природы определённая сумма таких выражений остаётся постоянной с течением времени.
Измеряется энергия в джоулях, как и работа.
Механическая энергия является мерой движения и взаимодействия механических объектов (материальных точек, твёрдых тел).
Мерой движения тела является кинетическая энергия. Она зависит от скорости тела. Мерой взаимодействия тел является потенциальная энергия. Она зависит от взаимного расположения тел.
Механическая энергия системы тел равна сумме кинетической энергии тел и потенциальной энергии их взаимодействия друг с другом.
к оглавлению ▴
Кинетическая энергия.
Кинетической энергией тела (принимаемого за материальную точку) называется величина
 ,
,
где — масса тела,  — его скорость.
— его скорость.
Кинетической энергией системы из тел называется сумма кинетических энергий каждого тела:
 .
.
Если тело движется под действием силы , то кинетическая энергия тела, вообще говоря, меняется со временем. Оказывается, именение кинетической энергии тела за некоторый промежуток времени равно работе силы . Покажем это для случая прямолинейного равноускоренного движения.
Пусть  — начальная скорость,
— начальная скорость,  — конечная скорость тела. Выберем ось
— конечная скорость тела. Выберем ось  вдоль траектории тела (и, соответственно, вдоль вектора силы ). Для работы силы получаем:
вдоль траектории тела (и, соответственно, вдоль вектора силы ). Для работы силы получаем:
 .
.
(мы воспользовались формулой для  , выведенной в статье «Равноускоренное движение»). Заметим теперь, что в данном случае проекция скорости отличается от модуля скорости разве что знаком; поэтому
, выведенной в статье «Равноускоренное движение»). Заметим теперь, что в данном случае проекция скорости отличается от модуля скорости разве что знаком; поэтому  и
и  . В результате имеем:
. В результате имеем:
 ,
,
что и требовалось.
На самом деле соотношение  справедливо и в самом общем случае криволинейного движения под действием переменной силы.
справедливо и в самом общем случае криволинейного движения под действием переменной силы.
Теорема о кинетической энергии. Изменение кинетической энергии тела равно работе, совершённой приложенными к телу внешними силами за рассматриваемый промежуток времени.
Если работа внешних сил положительна, то кинетическая энергия увеличивается ( , тело разгоняется).
, тело разгоняется).
Если работа внешних сил отрицательна, то кинетическая энергия уменьшается ( , тело замедляет движение). Пример — торможение под действием силы трения, работа которой отрицательна.
, тело замедляет движение). Пример — торможение под действием силы трения, работа которой отрицательна.
Если же работа внешних сил равна нулю, то кинетическая энергия тела за это время не меняется. Нетривиальный пример — равномерное движение по окружности, совершаемое грузом на нити в горизонтальной плоскости. Сила тяжести, сила реакции опоры и сила натяжения нити всегда перпендикулярны скорости, и работа каждой из этих сил равна нулю в течение любого промежутка времени. Соответственно, кинетическая энергия груза (а значит, и его скорость) остаётся постоянной в процессе движения.
Задача. Автомобиль едет по горизонтальной дороге со скоростью и начинает резко тормозить. Найти путь  , пройденный автомобилем до полной остановки, если коэффициент трения шин о дорогу равен .
, пройденный автомобилем до полной остановки, если коэффициент трения шин о дорогу равен .
Решение. Начальная кинетическая энергия автомобиля  , конечная кинетическая энергия
, конечная кинетическая энергия  . Изменение кинетической энергии
. Изменение кинетической энергии  .
.
На автомобиль действуют сила тяжести  , реакция опоры
, реакция опоры  и сила трения
и сила трения  . Сила тяжести и реакция опоры, будучи перпендикулярны перемещению автомобиля, работы не совершают. Работа силы трения:
. Сила тяжести и реакция опоры, будучи перпендикулярны перемещению автомобиля, работы не совершают. Работа силы трения:
 .
.
Из теоремы о кинетической энергии теперь получаем:
 .
.
к оглавлению ▴
Потенциальная энергия тела вблизи поверхности Земли.
Рассмотрим тело массы , находящееся на некоторой высоте над поверхностью Земли. Высоту считаем много меньше земного радиуса. Изменением силы тяжести в процессе перемещения тела пренебрегаем.
Если тело находится на высоте  , то потенциальная энергия тела по определению равна:
, то потенциальная энергия тела по определению равна:

где  — ускорение свободного падения вблизи поверхности Земли.
— ускорение свободного падения вблизи поверхности Земли.
Высоту не обязательно отсчитывать от поверхности Земли. Как мы увидим ниже (формулы (3), (4)), физическим смыслом обладает не сама по себе потенциальная энергия, но её изменение. А изменение потенциальной энергии не зависит от уровня отсчёта. Выбор нулевого уровня потенциальной энергии в конкретной задаче диктуется исключительно соображениями удобства.
Найдём работу, совершаемую силой тяжести при перемещении тела. Предположим, что тело перемещается по прямой из точки  , находящейся на высоте
, находящейся на высоте  , в точку
, в точку  , находящуюся на высоте
, находящуюся на высоте  (рис. 3).
(рис. 3).
 |
| Рис. 3.A=mg(h1-h2)[/math] |
Угол между силой тяжести и перемещением тела обозначим . Для работы силы тяжести получим:
 .
.
Но, как видно из рис. 3,  . Поэтому
. Поэтому
=mgh_{1}-mgh_{2}") ,
,
или
 . (3)
. (3)
Учитывая, что =- Delta W") , имеем также:
, имеем также:
 . (4)
. (4)
Можно доказать, что формулы (3) и (4) справедливы для любой траектории, по которой тело перемещается из точки в точку , а не только для прямолинейного отрезка.
Работа силы тяжести не зависит от формы траектории, по которой перемещается тело, и равна разности значений потенциальной энергии в начальной и конечной точках траектории. Иными словами, работа силы тяжести всегда равна изменению потенциальной энергии с противоположным знаком. В частности, работа силы тяжести по любому замкнутому пути равна нулю.
Сила называется консервативной, если при перемещении тела работа этой силы не зависит от формы траектории, а определяется только начальным и конечным положением тела. Сила тяжести, таким образом, является консервативной. Работа консервативной силы по любому замкнутому пути равна нулю. Только в случае консервативной силы возможно ввести такую величину, как потенциальная энергия.
к оглавлению ▴
Потенциальна яэнергия деформированной пружины.
Рассмотрим пружину жёсткости  . Начальная деформация пружины равна
. Начальная деформация пружины равна  . Предположим,
. Предположим,
что пружина деформируется до некоторой конечной величины деформации  . Чему равна при этом работа силы упругости пружины?
. Чему равна при этом работа силы упругости пружины?
В данном случае силу на перемещение не умножишь, так как сила упругости меняется в процессе деформации пружины. Для нахождения работы переменной силы требуется интегрирование. Мы не будем приводить здесь вывод, а сразу выпишем конечный результат.
Оказывается, сила упругости пружины также является консервативной. Её работа зависит лишь от величин и и определяется формулой:
 .
.
Величина

называется потенциальной энергией деформированной пружины (x — величина деформации).
Следовательно,
 ,
,
что полностью аналогично формулам (3) и (4).
к оглавлению ▴
Закон сохранения механической энергии.
Консервативные силы называются так потому, что сохраняют механическую энергию замкнутой системы тел.
Механическая энергия  тела равна сумме его кинетической и потенциальной энергий:
тела равна сумме его кинетической и потенциальной энергий:
 .
.
Механическая энергия системы тел равна сумме их кинетических энергий и потенциальной энергии их взаимодействия друг с другом.
Предположим, что тело совершает движение под действием силы тяжести и/или силы упругости пружины. Будем считать, что трения нет. Пусть в начальном положении кинетическая и потенциальная энергии тела равны  и
и  , в конечном положении —
, в конечном положении —  и
и  . Работу внешних сил при перемещении тела из начального положения в конечное обозначим .
. Работу внешних сил при перемещении тела из начального положения в конечное обозначим .
По теореме о кинетической энергии
 .
.
Но работа консервативных сил равна разности потенциальных энергий:
.
Отсюда получаем:
 ,
,
или
 .
.
Левая и правая части данного равенства представляют собой механическую энергию тела в начальном и конечном положении:
 .
.
Следовательно, при движении тела в поле силы тяжести и/или на пружине механическая энергия тела остаётся неизменной при отсутствии трения. Справедливо и более общее утверждение.
Закон сохранения механической энергии. Если в замкнутой системе действуют только консервативные силы, то механическая энергия системы сохраняется.
При этих условиях могут происходить лишь превращения энергии: из кинетической в потенциальную и наоборот. Общий запас механической энергии системы остаётся постоянным.
к оглавлению ▴
Закон изменения механической энергии.
Если между телами замкнутой системы имеются силы сопротивления (сухое или вязкое трение), то механическая энергия системы будет уменьшаться. Так, автомобиль останавливается в результате торможения, колебания маятника постепенно затухают и т. д. Силы трения неконсервативны: работа силы трения очевидным образом зависит от пути, по которому перемещается тело между данными точками. В частности, работа силы трения по замкнутому пути не равна нулю.
Снова рассмотрим движение тела в поле силы тяжести и/или на пружине. Вдобавок на тело действует сила трения, которая за рассматриваемый промежуток времени совершает отрицательную работу  . Работу консервативных сил (тяжести и упругости) по-прежнему обозначаем .
. Работу консервативных сил (тяжести и упругости) по-прежнему обозначаем .
Изменение кинетической энергии тела равно работе всех внешних сил:
 .
.
Но , следовательно
 .
.
Отсюда
=A_{TP}") ,
,
или
 .
.
В левой части стоит величина  — изменение механической энергии тела:
— изменение механической энергии тела:
 .
.
Итак,при движении тела в поле силы тяжести и/или на пружине изменение механической энергии тела равно работе силы трения. Так как работа силы трения отрицательна,изменение механической энергии также отрицательно: механическая энергия убывает.
Справедливо и более общее утверждение.
Закон изменения механической энергии. Изменение механической энергии замкнутой системы равно работе сил трения, действующих внутри системы.
Ясно, что закон сохранения механической энергии является частным случаем данного утверждения.
Конечно, убыль механической энергии не противоречит общефизическому закону сохранения энергии. В данном случае механическая энергия превращается в энергию теплового движения частиц вещества и их потенциальную энергию взаимодействия друг с другом, т. е. переходит во внутреннюю энергию тел системы.
Благодарим за то, что пользуйтесь нашими публикациями.
Информация на странице «Энергия.» подготовлена нашими авторами специально, чтобы помочь вам в освоении предмета и подготовке к ЕГЭ и ОГЭ.
Чтобы успешно сдать необходимые и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими материалами из данного раздела.
Публикация обновлена:
08.05.2023
Одним из важнейших понятий в физике является энергия, то есть способность тела совершать ту или иную работу. Механическая энергия подразделяется на кинетическую и потенциальную. Рассмотрим первый ее вид.
Кинетическая энергия – понятие и определение
Определение
Кинетическая энергия – это способность движущегося тела совершать определенную работу.
Например, движущийся автомобиль способен снести находящееся перед ним препятствие, а падающий камень – оставить вмятину на металлической пластинке.
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут.
Кинетическая энергия зависит от скорости движения и массы тела. Она описывается формулой:
(E_k=frac{mnu^2}2)
Единицей измерения кинетической энергии является Джоуль (Дж).
Проведя простые преобразования, легко вывести формулы для вычисления массы тела и скорости движения:
(m=frac{2E_k}{nu^2})
(nu=sqrt{frac{2E_k}m})
Из основной формулы видно: во сколько раз изменяется масса тела, во столько раз изменяется и величина кинетической энергии. Например, если масса будет уменьшена или увеличена в 5 раз, то и величина кинетической энергии станет соответственно меньше или больше в 5 раз.
При увеличении скорости кинетическая энергия увеличивается в квадратичной зависимости. Допустим, скорость движения тела стала в 6 раз больше. Соответственно его кинетическая энергия возросла в 36 раз.
Формула кинетической энергии тела справедлива только для скоростей значительно меньших, чем скорость света. Если же скорость движения приближается к 300 000 км/с, то тут начинает действовать теория относительности, созданная Альбертом Эйнштейном.
Кинетическая энергия зависит от особенностей рассмотрения системы. Если тело принимают как макроскопический объект, то оно будет обладать внутренней энергией. В этом случае кинетическая энергия возникнет только в момент его движения.
Это же тело можно рассматривать и с микроскопической точки зрения. Тепловое движение атомов и молекул обуславливает внутреннюю энергию тела. В то же время средняя кинетическая энергия этого движения пропорциональна абсолютной температуре тела. Коэффициент этой пропорциональной зависимости называется постоянной Больцмана.
Кинетическая энергия атомов и молекул при рассмотрении тела на микроскопическом уровне описывается формулой:
(E_k=frac32kT)
где (k) – это постоянная Больцмана.
Теорема об изменении кинетической энергии
Рассмотрим наиболее простой пример движения, при котором скорость движения и сила, действующая на тело имеют одинаковое направление. Тело совершает перемещение (S), так как сила (F) совершает работу (A). Также она изменяет и скорость движения, придавая телу некоторое ускорение. Это свидетельствует о наличии связи между работой силы и изменением скорости движения.
В данном случае работа силы будет описываться формулой:
A=FS
Запишем второй закон Ньютона в стандартном виде:
F=ma
При условии, что движение является равноускоренным (сила не зависит от координат и времени), работу можно записать так:
A=maS
Вспомним формулу из курса кинематики, связывающую перемещение, ускорение, начальную и конечную скорости движения тела:
(S=frac{nu^2-nu_0^2}{2a})
Подставляем ее в формулу работы:
(A=frac{ma(v^2-v_0^2)}{2a}=frac{mv^2}2-frac{mv_0^2}2)
Полученное равенство показывает, что разность между кинетической энергией в конечной и начальный момент времени равна работе силы. Это позволяет сформулировать теорему об изменении кинетической энергии.
Изменение кинетической энергии тела равна равнодействующей всех сил или работе силы:
(A=E_{k2}-E_{k1})
Таким образом, сила будет совершать отрицательную работу, если она направлена в сторону, противоположную движению тела. В этом случае начальная кинетическая энергия будет больше, чем конечная:
(frac{mv_0^2}2>frac{mv^2}2)
Так как сила имеет противоположное скорости направление, то модуль скорости будет уменьшаться, что и становится причиной уменьшения величины кинетической энергии.
Если же сила будет направлена в сторону движения, то кинетическая энергия будет возрастать:
(frac{mv_0^2}2<frac{mv^2}2)
Фактически теорему об изменении кинетической энергии можно рассматривать как иную формулировку второго закона Ньютона. Поэтому ее использование возможно в различных случаях, например, при рассмотрении действия силы трения, тяжести или упругости.
Примеры решения задач, как найти кинетическую энергию
Рассмотрим примеры решения задач на нахождение кинетической энергии.
Задача 1
Тело, имеющее массу 2 кг движется поступательно со скоростью 36 км/ч. Найдите, какой кинетической энергией оно обладает.
Решение
Прежде чем приступить к вычислению необходимо перевести скорость тела в единицы СИ:
36 км/ч = 10 м/с
Подставим известные значения в формулу кинетической энергии и выполним расчет:
(E_k=frac{2times10^2}2=100;Дж\)
Ответ: кинетическая энергия тела составляет 100 Джоулей.
Задача 2
Груз массой 0,2 кг прикреплен к пружине, которая закреплена горизонтально. Максимальная скорость колебания 3 м/с. Вычислить максимальную кинетическую энергию тела.
Решение
Воспользуемся выражением определения кинетической энергии:
(E_{k_{max}}=frac{mv^2}2)
Выполним вычисление:
(E_{k_{max}}=frac{0.2times3^2}2=0.9;Дж)
Ответ: максимальная кинетическая энергия пружины и груза составляет 0,9 Дж.
Задача 3
Найдите среднюю кинетическую энергию поступательного движения молекулы водорода при температуре Т = 280 К.
Решение
Для решения задачи воспользуемся уравнением, связывающим температуру и энергию:
(E_k=frac32kT)
где k – это постоянная Больцмана
Проведем вычисление:
(E_k=frac{3times1,38times10^{-23}times280}2=579,6times10^{-23};Дж)
Ответ: средняя кинетическая скорость молекулы водорода составляет (579,6times10^{-23};Дж.)
На чтение 15 мин Просмотров 2.1к.
Навигация
- Кинетическая энергия механической системы
- Энергетические характеристики
- Теорема об изменении кинетической энергии
Кинетическая энергия механической системы
Кинетической энергиейT материальной точки массы m, движущейся со скоростью V, называют величину
T=mV22 . (47)
Кинетической энергией механической системы называют сумму кинетических энергий включенных в эту систему материальных точек:
T=∑nk=1mV2k2 . (48)
В тех случаях, когда масса системы распределена непрерывно, суммирование в выражении (48) заменяют интегрированием по области распределения.
Найдем связь между значениями кинетической энергии механической системы в двух системах отсчета, одна из которых неподвижна, а другая движется поступательно со скоростью →VA . В этом случае скорость →Vkточки в неподвижной координатной системе и относительная скорость →Vrk связаны соотношением
→Vk=→VA+→Vrk .
Тогда вместо (48) получим
T=MV2A2+M→VA→VrC+Tr . (49)
Здесь →VrC=∑mk→VrkM — относительная скорость центра масс; Tr=∑nk=1mk(Vrk)22 — кинетическая энергия механической системы в подвижной системе координат.
Если за начало координат подвижной системы принимается центр масс механической системы С, то выражение (49) упрощается (теорема Кенига):
T=MV2C2+Tr. (50)
Использование выражений (48) и (50) позволяет сформулировать следующие правила вычисления кинетической энергии твердого тела: при поступательном движении тела массой M со скоростью →V
T=MV22 ; (51)
при вращении с угловой скоростью ω вокруг неподвижной оси z тела с моментом инерции Iz
T=Izω22 ; (52)
при плоскопараллельном движении твердого тела с угловой скоростью ω при значении центрального момента инерции ICz относительно оси, перпендикулярной плоскости движения, и значении IPz момента инерции относительно мгновенной оси вращения
T=MV2C2+ICzω22=IPzω22 ; (53)
при сферическом движении с угловой скоростью вращения ω
и значении момента инерции тела Iξотносительно мгновенной оси вращения ξ
T=Iξω22 ; (54)
в общем случае движения твердого тела
T=MV2C2+ICξω22 . (55)
Здесь момент инерции ICξ вычисляется относительно мгновенной оси Cξтакого сферического движения тела, которое оно совершает в системе осей, перемещающихся поступательно вместе с центром масс С.
В качестве примера вычислим кинетическую энергию механической системы, изображенной на рис.28, как сумму кинетических энергий тел ее формирующих. В этом случае
T=Tпост1+Tврбл+Tпост3+Tвр3=P1˙s212g+I2˙ϕ222+P3˙s232g+I3˙ϕ232 .
С учетом уравнений кинематических связей ˙s1=˙ϕ⋅R и ˙s3=˙ϕ3r3 выражение для кинетической энергии рассматриваемой механической системы с двумя степенями свободы может быть записано через любые две переменные, принятые за независимые. Например, если полагать независимыми s1 и s2, то выражение для кинетической энергии примет вид
T=˙s21(P1R2+I)2gR2+˙s223P34g .
Энергетические характеристики
К энергетическим характеристикам силы относят ее мощность, работу и потенциальную энергию.
Мощностью Nсилы →F, точка приложения которой движется со скоростью →V, называют величину
N=→F⋅→V. (56)
Работа силы d‘Aна элементарном интервале времени dtи соответствующем этому промежутку времени элементарному смещению d→rточки приложения определяется по правилу
d‘A=Ndt=→F⋅→Vdt=→F⋅d→r. (57)
Работой A силы на конечном интервале времени [0;t] и соответствующем изменении радиуса – вектора точки приложения этой силы от →r0 до →r называют величину
A=∫t0Ndt=∫→r→r0→Fd→r . (58)
Работа момента пары сил вычисляется аналогично.
Потенциальная энергия Попределена только в тех случаях, когда выражение (57) представляет собой полный дифференциал П:
d‘A=−dП. (59)
При выполнении условия (59) говорят, что сила потенциальна. Сопоставление формул (57) и (59) позволяет записать соотношения, связывающие проекции силы на оси выбранной координатной системы с функцией П:
Fx=−∂П∂x; Fy=−∂П∂y; Fz=−∂П∂z . (60)
Если точка приложения силы переместилась из положения M1(x1;y1;z1) в положение M2(x2;y2;z2), то путем интегрирования (59) можно получить
A12=−∫M2M1dП=П(x1;y1;z1)−П(x2;y2;z2). (61)
Заметим (см. формулы (57), (60) и (61)), что потенциальная энергия определена с точностью до постоянного слагаемого; отмеченная особенность позволяет полагать потенциальную энергию равной нулю в выбираемой нами точке (например, в начале координат). В последнем случае формула (61) принимает вид
A10=−∫M0M1dП=П(x;y;z). (62)
Иными словами – потенциальная энергия равна работе сил по переводу системы из отклоненного положения в начальное.
В том случае, когда для совокупности сил, действующих на механическую систему, можно записать выражение потенциальной энергии П, механическую систему называют консервативной. Такие механические системы обладают важными особенностями – работа действующих сил не зависит от вида траектории и закона движения по ней; работа при движении по замкнутому контуру равна нулю (см. (61)). Из (60) легко получить условия, при выполнении которых существует функция П:
∂Fx∂y=∂Fy∂x ; ∂Fx∂z=∂Fz∂x ; ∂Fz∂y=∂Fy∂z. (63)
В качестве примера вычислим потенциальную энергию для трех частных, но важных для технических приложений, случаев: действуют сила тяжести, центральная сила и сила упругости пружины.
Для силы тяжести →P=→i0+→j0−→kP выполняются критерии (63); тогда, в соответствии с формулами (58) и (62), имеем
П=A10=∫0z(Fxdx+Fydy+Fzdz)=∫0z(−P)dz=Pz. (64)
Для центральной силы →F=F(r)→rr, модуль которой зависит от расстояния rдо начала координат, так же выполняются критерии (63), поэтому
П=A10=∫r0rF(r)→rrd→r=∫r0rF(r)dr . (65)
Силу упругости пружины можно считать центральной силой, направленной к началу координат; в случае прямой пропорциональности между величиной силы Fx и удлинением x пружины имеем Fx=−cx. В этом случае
П=A10=∫0xFxdx=∫0x(−cx)dx=cx22. (66)
При определении энергетических характеристик системы сил суммируют соответствующие характеристики для всех сил, действующих на механическую систему.
Теорема об изменении кинетической энергии
Умножим уравнения (2.5) скалярно на скорость →Vk и сложим.
∑nk=1mkd→Vkdt→Vk=∑nk=1→Fek→Vk+∑nk=1→Fik→Vk=Ne+Ni ,
где Ne и Ni— мощности внешних и внутренних сил, действующих на механическую систему.
Заметим, что если связи между телами, формирующими систему, допускают деформацию (см. пружину жесткостью c2 в примере 21), то точки приложения равных и противоположно направленных внутренних сил →T2 имеют различные скорости, вследствие чего их суммарная мощность не будет равной нулю.
Изменив порядок суммирования и дифференцирования в левой части равенства, ее можно привести к виду
∑nk=1mkd→Vkdt→Vk=ddt∑nk=1mk→V2k2=ddt∑nk=1mkV2k2=dTdt .
Окончательно имеем запись теоремы об изменении кинетической энергии механической системы в дифференциальной форме:
dTdt=Ne+Ni. (67)
— производная по времени от кинетической энергии механической системы равна мощности всех действующих сил.
В дифференциальной форме, основанной на понятии работы силы за элементарный промежуток времени, получим
dT=(Ne+Ni)dt=d‘Ae+d‘Ai. (68)
Интегрируя (68) на интервале времени [0;t], получим интегральную форму записи теоремы об изменении кинетической энергии
T1−T0=Ae+Ai , (69)
где T1=T(t); T0=T(0); Ae=∫t0Nedt; Ai=∫t0Nidt.
В частном случае, когда для совокупности внешних и внутренних сил системы можно записать выражение потенциальной энергии
d‘Ae+d‘Ai=−dП,
вместо (68) имеем соотношение
d(T+П)=0 . (70)
В такой системе выполняется закон сохранения полной механической энергии
T+П=const ,
а сама система называется консервативной.