VMath
Инструменты сайта
Основное
Навигация
Информация
Действия
Содержание
Касательная, нормальная плоскость, соприкасающаяся плоскость, бинормаль, главная нормаль, репер Френе
Краткие теоретические сведения
Кривая в пространстве
Рассмотрим в пространстве гладкую кривую $gamma$.
Пусть точка $M$ принадлежит данной кривой и отвечает значению параметра $t=t_0$. Тогда радиус-вектор и координаты данной точки равны:
begin vec=vec(t_0), quad x_0=x(t_0),, y_0=y(t_0), , z_0=z(t_0). end
Пусть в точке $M$ $ vec(t_0)neqvec<0>$, то есть $M$ не является особой точкой.
Касательная к кривой
Касательная к кривой, проведенная в точке $M$, имеет направляющий вектор коллинеарный вектору $vec(t_0)$.
Пусть $vec$ — радиус-вектор произвольной точки касательной, тогда уравнение этой касательной имеет вид
Здесь $lambdain(-infty,+infty)$ — параметр, определяющий положение точки на касательной (то есть разным значениям $lambda$ будут соответствовать разные значения $vec$).
Если $vec=$, $M = (x(t_0), y(t_0), z(t_0))$, то можно записать уравнение касательной в каноническом виде:
Нормальная плоскость
Плоскость, проходящую через данную точку $M$ кривой $gamma$ перпендикулярно касательной в этой точке, называют нормальной плоскостью.
Пусть $vec$ — радиус-вектор произвольной точки нормальной плоскости, тогда ее уравнение можно записать в векторном виде через скалярное произведение векторов $vec-vec(t_0)$ и $vec(t_0)$:
Если расписать покоординатно, то получим следующее уравнение:
begin x'(t_0)cdot(X-x(t_0))+y'(t_0)cdot(Y-y(t_0))+z'(t_0)cdot(Z-z(t_0))=0. end
Соприкасающаяся плоскость
Плоскость, проходящую через заданную точку $M$ кривой $gamma$ параллельно векторам $vec(t_0)$, $vec(t_0)$, когда они неколлинеарны, называют соприкасающейся плоскостью кривой.
Если $vec$ — радиус-вектор произвольной точки соприкасающейся плоскости, то ее уравнение можно записать через смешанной произведение трех компланарных векторов $vec-vec(t_0)$, $vec(t_0)$, $vec(t_0)$:
Зная координаты точки и векторов, определяющих плоскость, запишем смешанное произведение через определитель. Получим следующее уравнение соприкасающейся плоскости:
begin left| begin X-x(t_0) & Y-y(t_0) & Z-z(t_0) \ x'(t_0) & y'(t_0) & z'(t_0)\ x»(t_0) & y»(t_0) & z»(t_0) \ end right|=0 end
Бинормаль и главная нормаль
Прямая, проходящая через точку $M$ кривой $gamma$ перпендикулярно касательной к кривой в этой точке, называется нормалью.
Таких кривых можно провести бесконечно много, все они образуют нормальную плоскость. Мы выделим среди нормалей две — бинормаль и главную нормаль.
Нормаль, перпендикулярную соприкасающейся плоскости, называют бинормалью.
Нормаль, лежащую в соприкасающейся плоскости, называют главной нормалью.
Из определения бинормали (перпендикулярна касательной и перпендикулярна соприкасающейся плоскости) следует, что в качестве ее направляющего вектора мы можем взять векторное произведение $ vec(t_0)timesvec(t_0)$, тогда ее уравнение можно записать в виде:
Как и раньше, $vec$ — радиус-вектор произвольной точки бинормали. Каноническое уравнение прямой:
Из определения главной нормали (перпендикулярна касательной и перпендикулярна бинормали) следует, что в качестве ее направляющего вектора можно взять векторное произведение $vec(t_0) timesleft[vec(t_0),vec(t_0)right]$:
Уравнение в каноническом виде распишите самостоятельно.
Спрямляющая плоскость
Плоскость, проходящую через заданную точку $M$ кривой $gamma$ перпендикулярно главной нормали, называют спрямляющей плоскостью.
Другое определение: Плоскость, определяемую касательной к кривой и бинормалью в той же точке, называют спрямляющей плоскостью.
Второе определение позволяет записать уравнение спрямляющей плоскости через смешанное произведение трех компланарных векторов, определяющих эту плоскость $vec-vec(t_0)$, $vec(t_0)$, $vec(t_0)timesvec(t_0)$: begin left(vec-vec(t_0),, vec(t_0),, vec(t_0)timesvec(t_0)right)=0. end Зная координаты соответствующих векторов, можно легко записать это смешанное произведение через определитель, раскрыв который, вы получите общее уравнение спрямляющей плоскости.
Репер Френе
Орт (то есть единичный вектор) касательной обозначим: $$ vec<tau>=frac<vec(t_0)><|vec(t_0)|>. $$ Орт бинормали: $$ vec<beta>=frac<vec(t_0)timesvec(t_0)><|vec(t_0)timesvec(t_0)|>. $$ Орт главной нормали: $$ vec<nu>=frac<vec(t_0) times[vec(t_0),,vec(t_0)]><|vec(t_0) times [vec(t_0),,vec(t_0)]|>. $$
Правая тройка векторов $vec<tau>$, $vec<nu>$, $vec<beta>$ называется репером Френе.
Решение задач
Задача 1
Кривая $gamma$ задана параметрически:
Точка $M$, принадлежащая кривой, соответствует значению параметра $t=0$. Записать уравнения касательной, бинормали, главной нормали, нормальной плоскости, соприкасающейся плоскости и спрямляющей плоскости, проведенных к данной кривой в точке $M$. Записать векторы репера Френе.
Решение задачи 1
Задачу можно решать разными способами, точнее в разном порядке находить уравнения прямых и плоскостей.
Начнем с производных.
begin 1cdot X+0cdot Y+1cdot (Z-1)=0,, Rightarrow ,, X+Z=1. end
begin left| begin X-0 & Y-0 & Z-1 \ 1 & 0 & 1\ 0 & 2 & 1 \ end right|=0 end Раскрываем определитель, получаем уравнение: begin -2X-Y+2Z-2=0 end
begin 1cdot X-4cdot Y-1cdot (Z-1)=0,, Rightarrow ,, X-4Y-Z+1=0. end
Поскольку направляющий вектор главной нормали у нас был найден как векторное произведение направляющих векторов касательной и бинормали, тройка $vec<tau>$, $vec<nu>$, $vec<beta>$ не будет правой (по определению векторного произведения вектор $vec<tau>timesvec<beta>$ направлен так, что тройка векторов $vec<tau>$, $vec<beta>$, $vec<nu>=vec<tau>timesvec<beta>$
— правая). Изменим направление одного из векторов. Например, пусть
Теперь тройка $vec<tau>$, $vec<nu>$, $vec<tilde<beta>>$ образует репер Френе для кривой $gamma$ в точке $M$.
Задача 2
Написать уравнение соприкасающейся плоскости к кривой $$ x=t,,, y=frac<2>,,, z=frac<3>, $$ проходящей через точку $N(0,0,9)$.
Решение задачи 2
Нетрудно заметить, что точка $N$ не принадлежит заданной кривой $gamma$. Следовательно соприкасающаяся плоскость проведена в какой-то точке $M(t=t_0)ingamma$, но при этом плоскость проходит через заданную точку $N(0,0,9)$.
Найдем значение параметра $t_0$.
Для этого запишем уравнение соприкасающейся плоскости, проведенной в произвольной точке $M(t=t_0)$. И учтем, что координаты $N$ должны удовлетворять полученному уравнению.
Соприкасающаяся плоскость определяется векторами $vec(t_0)$, $vec(t_0)$, поэтому записываем определитель begin left| begin X-t_0 & Y-t_0^2/2 & Z-t_0^3/3 \ &&\ 1 & t_0 & t^2_0 \ &&\ 0 & 1 & 2t_0 end right|=0 quad Rightarrow end
begin (X-t_0)cdot t_0^2 — (Y-t_0^2/2)cdot 2t_0 + (Z-t_0^3/3)=0. end Подставляем вместо $X$, $Y$, $Z$ координаты точки $N$: $X=0$, $Y=0$, $Z=9$, упрощаем и получаем уравнение относительно $t_0$: begin 9-t_0^3/3=0 quad Rightarrow quad t_0=3. end Подставив найденное $t_0$ в записанное ранее уравнение, запишем искомое уравнение соприкасающейся плоскости: $$ 9X-6Y+Z-9=0. $$
Задача 3
Через точку $Pleft(-frac45,1,2right)$ провести плоскость, являющуюся спрямляющей для кривой: $$ x=t^2,,, y=1+t,,, z=2t. $$
Решение задачи 3
Как и в предыдущей задаче нам неизвестны координаты точки, в которой проведена спрямляющая плоскость к заданной кривой. Найдем их.
Спрямляющая плоскость определяется касательной и бинормалью, то есть векторами $vec(t_0)$ и $vec(t_0)timesvec(t_0)$.
Записываем уравнение спрямляющей плоскости: begin left| begin X-t_0^2 & Y-1-t_0 & Z-2t_0 \ 2t_0 & 1 & 2\ 0 & 4 & -2 end right|= 0 end
Раскрываем определитель. Подставляем в уравнение координаты точки $P$: $X=-4/5$, $Y=1$, $Z=2$. Упрощаем и получаем уравнение для нахождения $t_0$: begin 5t_0^2-8t_0-4=0 ,, Rightarrow ,, t_<01>=2,, t_<02>=-frac25. end
Уравнения соприкасающихся плоскостей к заданной кривой, проходящих через $P$, принимают вид: begin & 5X-4Y-8Z+24=0,\ & 25X+4Y+8Z=0. end
Касательный вектор и касательное пространство к многообразию
Пусть на многообразии M задана кривая x = x(t) , a £ t £ b , где x – точка многообразия. Пока кривая находится в области Up действия локальных координат  , уравнения кривой можно записать в виде
, уравнения кривой можно записать в виде

 .
.
В этих координатах имеем вектор скорости кривой
 .
.
В области действия двух координатных систем Up и Uq имеем две записи для уравнения кривой
и  ,
,
 .
.
Дифференцируя это равенство получаем
 .
.
На основании этой формулы вводится следующее определение.
Определение 1. Касательным вектором к многообразию M в произвольной точке x называется вектор, записываемый в системе локальных координат  набором чисел
набором чисел  , который при переходе к другой системе координат
, который при переходе к другой системе координат  преобразуется по закону
преобразуется по закону
 .
.
Касательные векторы к n-мерному многообразию M в данной точке x образуют n-мерное линейное пространство Tx = TxM — касательное пространство.
В частности, вектор скорости любой гладкой кривой является касательным вектором.
Выбор локальных координат  в окрестности точки x задает базис
в окрестности точки x задает базис  в касательном пространстве Tx .
в касательном пространстве Tx .
Гладкое отображение f многообразия M в многообразие N определяет индуцированное линейное отображение касательных пространств
При этом вектор скорости кривой x = x(t) на многообразии M переходит в вектор скорости кривой f(x(t)) на многообразии N.
В локальных координатах (x a ) в окрестности точки x и локальных координатах (y b ) в окрестности точки f(x) отображение f имеет вид
y b = f b (x 1 ,x 2 ,…,x n ), b = 1, 2, …, m ,
тогда индуцированное отображение f* касательных пространств задается матрицей Якоби:
 .
.
Векторное поле
Определение 1. Если в каждой точке x многообразия M определен вектор из соответствующего касательного пространства Tx, то говорят, что на многообразии задано векторное поле.
Для уточнения этого понятия отметим, что на множестве TM всех касательных пространств к многообразию M естественным образом вводится структура многообразия, картами которого служат прямые суммы карт многообразия M и касательных пространств к M в соответствующих точках многообразия M. Получаемое таким образом многообразие называется векторным расслоением многообразия M .Теперь векторное поле на многообразии M можно определить как отображение
такое, что y(x) Î TxM для каждого x Î M.
Определение 2. Векторное поле называется гладким (класса C ¥ ), если отображение y является гладким.
В локальных координатах многообразия TM векторное поле имеет вид
 . (2)
. (2)
Определение 3. Векторной линией называется такая линия многообразия, в каждой точке которой вектор поля касается этой линии. Векторные линии также называются орбитами и интегральными кривыми векторного поля.
В локальных координатах векторная линия описывается следующей системой дифференциальных уравнений:
 , i = 1,2,…,n ,
, i = 1,2,…,n ,
где  — координатное задание искомой линии, а
— координатное задание искомой линии, а  — координаты векторной части векторного поля. Граничным условием здесь является
— координаты векторной части векторного поля. Граничным условием здесь является  , где
, где  — координаты точки xo.
— координаты точки xo.
Пример 1. В трехмерном евклидовом пространстве рассмотрим векторное поле
X 1 = bx 3 – cx 2 , X 2 = cx 1 — ax 3 , X 3 = ax 2 — bx 1 .
Система дифференциальных уравнений для нахождения векторной линии принимает вид
Умножим эти уравнения на x i соответственно и, сложив, получим
x 1 dx 1 + x 2 dx 2 + x 3 dx 3 = 0 dt = 0. (3)
Аналогично, умножая эти уравнения на a, b и c и складывая получим
adx 1 + bdx 2 + cdx 3 = 0. (4)
Интегрируя уравнения (3) и (4) получаем следующую систему уравнений
 (5)
(5)
Из этой системы следует, что векторные линии рассматриваемого векторного поля получаются в результате пересечения всевозможных концентрических сфер с центрами в начале координат со всевозможными плоскостями перпендикулярными вектору (a,b,c), то есть, векторные линии данного векторного поля являются окружностями с центрами на прямой, проходящей через начало координат и имеющей направляющим вектором вектор (a,b,c) и лежащими в плоскостях перпендикулярных этой прямой.
Отметим, что рассмотренное векторное поле является полем скоростей точек твердого тела, вращающегося вокруг описанной выше прямой с постоянной угловой скоростью.
Касательная и нормаль к графику функции
Основные формулы
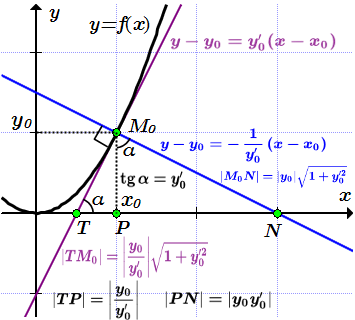
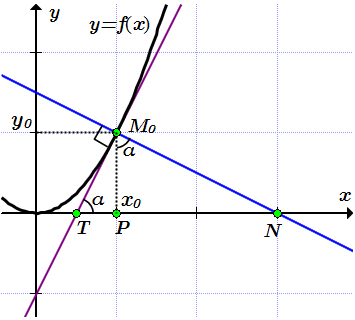
Пусть на некотором интервале X задана функция . Нас интересуют геометрические характеристики графика этой функции в некоторой заданной точке при значении аргумента , где . Пусть функция имеет в производную, которую будем обозначать как . Тогда через точку мы можем провести касательную к графику. Тангенс угла α между осью абсцисс x и касательной равен производной функции в точке :
(1) .
А само уравнение касательной имеет вид:
(2) .
В аналитической геометрии тангенс угла между прямой и осью абсцисс называют угловым коэффициентом прямой. Таким образом производная равна угловому коэффициенту касательной в .
См. Геометрический смысл производной
Прямая, перпендикулярная касательной, проведенной через точку , называется нормалью к графику функции в этой точке. Уравнение нормали имеет вид:
(3) .
См. Уравнение прямой с угловым коэффициентом ⇓
Пусть две кривые и пересекаются в точке . Тогда угол φ между касательными к этим кривым в точке называется углом между кривыми. Он определяется по формуле:
(4) , где .
Отсюда .
при .
Вывод формулы ⇓
Определения
Здесь мы приводим определения, которые встречаются в литературе, и имеют отношение к касательной и нормали. Вывод формул приводится в примере 1 ⇓.
Определение касательной приводится здесь. Уравнение касательной:
.
Касательная TM0, нормаль M0N, подкасательная TP, поднормаль PN. Нормалью к графику функции в точке называется прямая, перпендикулярная касательной, проведенной через эту точку. Уравнение нормали:
.
Отрезком касательной называют отрезок между точкой пересечения касательной с осью абсцисс и точкой .
.
Отрезком нормали называют отрезок между точкой пересечения нормали с осью абсцисс и точкой .
.
Подкасательной называют отрезок между точкой пересечения касательной с осью абсцисс и проекции точки на эту ось.
.
Поднормалью называют отрезок между точкой пересечения нормали с осью абсцисс и проекции точки на эту ось.
.
Углом между кривыми в точке их пересечения называют угол между касательными к кривым, проведенных через точку .
Полезные формулы из аналитической геометрии
Далее приводятся некоторые сведения из аналитической геометрии, которые могут оказаться полезными при решении задач.
Уравнение прямой, проходящей через две заданные точки и :
.
Здесь – направляющий вектор прямой.
Умножив это уравнение на , получим уравнение прямой в другом виде:
.
Здесь – вектор нормали прямой. Тогда само уравнение означает равенство нулю скалярного произведения векторов и .
Уравнение прямой, проходящей через точку параллельно вектору имеет вид:
.
Вектор называется направляющим вектором данной прямой. Это уравнение можно написать в параметрическом виде, введя параметр t :
Уравнение прямой, проходящей через точку перпендикулярно вектору имеет вид:
.
Вектор называется вектором нормали данной прямой.
Уравнение прямой с угловым коэффициентом k , проходящей через точку :
.
Угол α между прямой и осью x определяется по формуле:
.
Если две прямые взаимно перпендикулярны, то их угловые коэффициенты и связаны соотношением:
.
Уравнение прямой в отрезках, пересекающей оси координат в точках :
.
Примеры решения задач
Все примеры Ниже рассмотрены примеры решений следующих задач.
1. Найти уравнения касательной и нормали к кривой в точке . Найти длины отрезков касательной, нормали, подкасательной и поднормали. Решение ⇓
2. Составить уравнения касательной и нормали к циссоиде, заданной в параметрическом виде
, проведенных в точке . Решение ⇓
3. Заданной в неявном виде . Решение ⇓
4. Найти угол между кривыми и Решение ⇓
Пример 1
Составить уравнения касательной и нормали к кривой в точке . Найти длины отрезков касательной, нормали, подкасательной и поднормали.
Находим значение функции при :
.
Находим производную:
.
Находим производную в точке :
;
.
Находим уравнение касательной по формуле (2):
;
;
;
– уравнение касательной.
Строим касательную на графике. Поскольку касательная – это прямая, то нам нужно знать положения двух ее точек, и провести через них прямую.
При ;
при .
Проводим касательную через точки и .
 Касательная и нормаль к графику функции y=x 2 в точке M0(1;1).
Касательная и нормаль к графику функции y=x 2 в точке M0(1;1).
Найдем угол α между касательной и осью абсцисс по формуле (1):
.
Подставляем :
;
.
Находим уравнение нормали по формуле (3):
;
;
;
;
;
– уравнение нормали.
Строим нормаль по двум точкам.
При ;
при .
Проводим нормаль через точки и .
Находим длину отрезка касательной . Из прямоугольника имеем:
.
Поясним использованную формулу. Поскольку , то . Тогда
.
Подставляем :
.
Находим длину отрезка подкасательной . Из прямоугольника имеем:
.
Подставляем :
.
Находим длину отрезка нормали . Поскольку и , то треугольники и подобны. Тогда . Из прямоугольника имеем:
.
Подставляем :
.
Находим длину отрезка поднормали . Из прямоугольника имеем:
.
Примечание.
При выводе формул, можно сначала определить длины отрезков подкасательной и поднормали, а затем из прямоугольников, по теореме Пифагора, найти длины отрезков касательной и нормали:
;
.
Уравнение касательной: ; уравнение нормали: ;
длина отрезка касательной: ; длина отрезка нормали: ; длина подкасательной: ; длина поднормали: .
Пример 2
Составить уравнения касательной и нормали к циссоиде, заданной в параметрическом виде , проведенных в точке .
Находим значения переменных при .
;
.
Обозначим эту точку как .
Находим производные переменных x и y по параметру t .
;
;
;
;
.
Подставляя , находим производную y по x в точке .
.
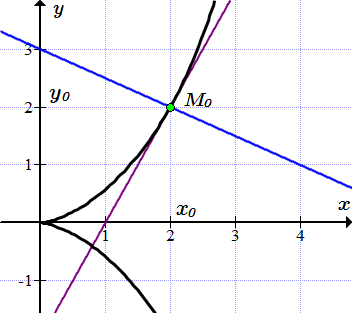 Касательная и нормаль к циссоиде в точке (2;2).
Касательная и нормаль к циссоиде в точке (2;2).
Применяя формулу (2), находим уравнение касательной к циссоиде, проходящей через точку .
;
;
;
.
Применяя формулу (3), находим уравнение нормали к циссоиде в точке .
;
;
;
.
Уравнение касательной: .
Уравнение нормали: .
Пример 3
Составить уравнения касательной и нормали к циссоиде, заданной в неявном виде:
(П3) ,
проведенных в точке .
Для получения уравнение касательной и нормали, нам нужно знать значение производной функции в заданной точке. Функция (П3) задана неявно. Поэтому применяем правило дифференцирования неявной функции. Для этого дифференцируем (П3) по x , считая, что y является функцией от x .
;
;
;
.
Отсюда
.
Находим производную в заданной точке, подставляя .
;
.
Находим уравнение касательной по формуле (2).
;
;
;
.
Находим уравнение нормали по формуле (3).
;
;
;
.
Касательная и нормаль к циссоиде изображены на рисунке ⇑.
Уравнение касательной: .
Уравнение нормали: .
Пример 4
Найти угол между кривыми и .
Найдем множество точек пересечения кривых, решая систему уравнений.
Левые части равны. Приравниваем правые части и выполняем преобразования.
;
(П4) .
Поскольку функция строго монотонна, то уравнение (П4) имеет один корень:
.
При . Кривые пересекаются в единственной точке . Обозначим ее как , где .
Введем обозначения для функций, с помощью которых заданы кривые:
.
Найдем их производные.
;
.
Найдем значения производных в точке , подставляя .
;
.
Ниже приводятся графики функций ⇓ и вывод формулы угла между кривыми.
Вывод формулы для угла между кривыми
Изложим вывод формулы (4). Для иллюстрации используем только что рассмотренный пример ⇑, в котором .
Рассмотрим две кривые, заданные уравнениями и , и пересекающиеся в некоторой точке . Докажем, что угол между кривыми определяется по формуле (4):
, где .
Или ;
при .
Проведем касательные к графикам функций в точке . Углы, которые образуют касательные с осью x обозначим как и . За положительное направление выберем направление против часовой стрелки. На рисунке . Считаем, что значения углов принадлежат интервалам . Согласно геометрическому смыслу производной,
.
В аналитической геометрии принято, что угол φ между прямыми равен наименьшему значению угла между ними.
Если , то ;
если , то .
Таким образом величина угла φ между касательными может находиться только в пределах
(Ф2) .
На рисунке угол между лучами и больше 90°, а между лучами и – меньше. Поэтому .
При доказательстве мы будем использовать соотношение:
, которое выполняется при .
Тогда в силу (Ф2),
.
Случай мы рассмотрим отдельно.
1) Пусть .
Тогда угол между прямыми . И мы имеем:
.
В конце мы подставили (Ф1).
2) Пусть .
Тогда ; . Поэтому . Это можно записать так: . Также применим формулу: . В результате получаем:
.
Этот случай изображен на рисунке ⇑.
3) Пусть .
При этом касательные взаимно перпендикулярны, . В этом случае , что указано в (4).
Использованная литература:
П.Е. Данько, А.Г. Попов, Т.Я.Кожевникова. Высшая математика в упражнениях и задачах. Часть 1. Москва, Высшая школа, 1980.
Л.Д. Кудрявцев, А.Д. Кутасов, В.И. Чехлов, М.И. Шабунин. Сборник задач по математическому анализу. Том 1. Москва, Физматлит, 2003.
Автор: Олег Одинцов . Опубликовано: 30-06-2021
http://helpiks.org/8-24441.html
http://1cov-edu.ru/mat-analiz/proizvodnaya/kasatelnaya-i-normal-k-grafiku-funktsii/
From Wikipedia, the free encyclopedia
For a more general, but more technical, treatment of tangent vectors, see Tangent space.
In mathematics, a tangent vector is a vector that is tangent to a curve or surface at a given point. Tangent vectors are described in the differential geometry of curves in the context of curves in Rn. More generally, tangent vectors are elements of a tangent space of a differentiable manifold. Tangent vectors can also be described in terms of germs. Formally, a tangent vector at the point  is a linear derivation of the algebra defined by the set of germs at .
is a linear derivation of the algebra defined by the set of germs at .
Motivation[edit]
Before proceeding to a general definition of the tangent vector, we discuss its use in calculus and its tensor properties.
Calculus[edit]
Let  be a parametric smooth curve. The tangent vector is given by
be a parametric smooth curve. The tangent vector is given by  , where we have used a prime instead of the usual dot to indicate differentiation with respect to parameter t.[1] The unit tangent vector is given by
, where we have used a prime instead of the usual dot to indicate differentiation with respect to parameter t.[1] The unit tangent vector is given by

Example[edit]
Given the curve

in  , the unit tangent vector at
, the unit tangent vector at  is given by
is given by

Contravariance[edit]
If is given parametrically in the n-dimensional coordinate system xi (here we have used superscripts as an index instead of the usual subscript) by  or
or

then the tangent vector field  is given by
is given by

Under a change of coordinates

the tangent vector  in the ui-coordinate system is given by
in the ui-coordinate system is given by

where we have used the Einstein summation convention. Therefore, a tangent vector of a smooth curve will transform as a contravariant tensor of order one under a change of coordinates.[2]
Definition[edit]
Let  be a differentiable function and let
be a differentiable function and let  be a vector in
be a vector in  . We define the directional derivative in the direction at a point
. We define the directional derivative in the direction at a point  by
by

The tangent vector at the point  may then be defined[3] as
may then be defined[3] as

Properties[edit]
Let  be differentiable functions, let
be differentiable functions, let  be tangent vectors in at , and let
be tangent vectors in at , and let  . Then
. Then



Tangent vector on manifolds[edit]
Let  be a differentiable manifold and let
be a differentiable manifold and let  be the algebra of real-valued differentiable functions on . Then the tangent vector to at a point in the manifold is given by the derivation
be the algebra of real-valued differentiable functions on . Then the tangent vector to at a point in the manifold is given by the derivation  which shall be linear — i.e., for any
which shall be linear — i.e., for any  and we have
and we have

Note that the derivation will by definition have the Leibniz property

See also[edit]
- Differentiable curve § Tangent vector
- Differentiable surface § Tangent plane and normal vector
References[edit]
- ^ J. Stewart (2001)
- ^ D. Kay (1988)
- ^ A. Gray (1993)
Bibliography[edit]
- Gray, Alfred (1993), Modern Differential Geometry of Curves and Surfaces, Boca Raton: CRC Press.
- Stewart, James (2001), Calculus: Concepts and Contexts, Australia: Thomson/Brooks/Cole.
- Kay, David (1988), Schaums Outline of Theory and Problems of Tensor Calculus, New York: McGraw-Hill.
8
Лекция 3
Дифференцируемость
функции многих переменных.
Производные и
дифференциалы высших порядков.
Геометрические
приложения частных производных.
Геометрический
смысл первого дифференциала
П.1. Производные
высших порядков.
Теорема о
равенстве смешанных производных
Пусть дана
дифференцируемая функция n
переменных
u( .
.
Пусть также вычислена производная
первого порядка по переменной

. Эта функция тоже зависит от переменных
 .
.
Возьмем от

производную по переменной
 :
:
 =
= .
.
Функция

называется
частной производной второго порядка
от функции u( по
по
переменным


Таким же образом
можно определить производные и третьего
порядка .
Таким образом,
справедлива рекуррентная формула
 .
.
Производная

называется смешанной, если среди
переменных
есть несовпадающие.
Пример.
Рассмотрим функцию двух переменных

. Производные
 ,
,

являются несмешанными производными,
 ,
,
 —
—
смешанными производными.
Теорема (о
равенстве смешанных производных).
Пусть
1)
функция

определена в некоторой окрестности
точки
 ;
;
2)
существуют частные производные
 ,
,
 ,
,
 ,
,

в этой окрестности;
2)
производные второго порядка
 ,
,

непрерывны в точке
 .
.
Тогда

в точке
 .
.
Доказательство.
Рассмотрим
вспомогательное выражение:
 .
.
Здесь
h,k
-достаточно малые чтобы оставаться в
пределах окрестности из пунктов 1)-2).
Введем вспомогательную
функцию


(*).
Очевидно,

Но

непрерывна в точке
 .
.
Пусть
 .
.
Тогда
 .
.
Рассмотрим
выражение, аналогичное предложенному
выше:
 ,
,
где
 .
.
Аналогично
получаем, что при

выполнено
 .
.
Следовательно,
 .
.
▲
Справедлива
следующая общая теорема.
Теорема
( без доказательства).
Пусть
функция

определена в области
 .
.
Пусть существуют и непрерывны все
частные производные до k
-го порядка включительно в области .
.
Тогда смешанные производные до -го
порядка не зависят от порядка
дифференцирования.
Пример.
Рассмотрим
функцию двух переменных, у которой
смешанные производные второго порядка
существуют, но не равны в точке (0,0):

Имеем:


Видим,
что

П.2. Дифференциалы
высших порядков.
Неинвариантность
дифференциалов порядка выше первого
Рассмотрим
дифференцируемую функцию n
переменных
 .
.
Вычислим ее первый дифференциал:

В правой части
этого равенства стоит функция от
переменных
 ,
,

— некоторые фиксированные постоянные.
Возьмем дифференциал от левой и правой
частей:
Формально можно
записать:

Аналогично,

Вообще, справедлива
формула:

Рассмотрим
функцию двух переменных
 .
.
Запишем формулы первого, второго и
третьего дифференциалов этой функции:



Исследуем,
является ли дифференциал порядка выше
первого инвариантной величиной. Пусть
функция

является сложной функцией переменных


x=x(u,v),
y=y(u,v);
Справедлива
формула второго дифференциала:

(*)
Докажем, что
нельзя записать, как это мы делали для
первого дифференциала, что
то есть форма второго дифференциала
зависит от того, являются ли используемые
переменные зависимыми или нет.
Имеем:

{так как первый
дифференциал инвариантен}=

Если
бы

были независимыми переменными, то была
бы справедлива формула, аналогичная
формуле (*). Но в нашем случае, когда

являются в свою очередь некоторыми
функциями, видим, что форма второго
дифференциала меняется, появляются два
новых слагаемых

и

. Видим, что форма второго дифференциала
неинвариантна.
Однако, существует
частный случай, когда можно говорить,
что форма второго дифференциала
инвариантна. Это случай линейной замены
переменных:

Отсюда в случае
линейной замены переменных действительно
получаем
П.3. Геометрические
приложения частных производных.
Касательный
вектор к кривой. Нормаль к поверхности.
Касательная
плоскость

1)
Касательный
вектор.
Рассмотрим кривую L
в пространстве, заданную параметрическими
уравнениями:

Фиксируем некоторое
значение
 ,
,
тем самым фиксируем некоторую точку M
на кривой L
:

Придадим переменной t
некоторое приращение
 ,
,
получим точку

Рассмотрим вектор



Пусть
 .
.
Тогда из рисунка мы видим, что вектор

направлен по касательной к кривой
 ,
,
в пределе можно записать формулу

Вектор

является
касательным вектором к кривой L
.
2)
Касательная
плоскость к поверхности
 .
.
Пусть задана
поверхность

Пусть
точка

— произвольная точка на поверхности
 то
то
есть ее координаты удовлетворяют
уравнению поверхности

.
Проведем через
точку M кривую L,
целиком лежащую на поверхности
 :
:
 .
.
Строим
 —
—
касательный вектор к кривой L
в точке M.
Пусть кривая L
имеет следующие параметрические
уравнения:


Но

Функция

одной переменной
t
тождественно равна 0 на отрезке [a,b]
Здесь мы ввели
вектор

— градиент функции

Вектор

перпендикулярен касательному вектору
ко кривой L
в точке M.
Соотношение
(
верно для любой кривой L,
проходящей через точку M
целиком лежащей на поверхности
 .
.
Таким образом, вектор

направлен вдоль нормали к поверхности
S
в точке M. 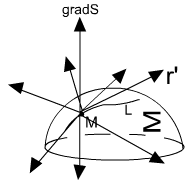
Учитывая этот
факт, получаем, что касательная
плоскость к поверхности

в
точке

имеет
уравнение:

Рассмотрим L
— нормаль к поверхности

в точке
 .
.
Вектор

является направляющим вектором этой
прямой, отсюда выписываем уравнение
нормали к поверхности

в точке
 :
:
 —
—
уравнение нормали к поверхности.
Замечания.
1)
Пусть поверхность

задана явно:

этом случае
уравнение касательной плоскости к
поверхности

имеет вид:

Нормаль
к поверхности

имеет
уравнение:

2)
Если в точке

выполнено

или хотя бы одна из частных производных
не существует в этой точке, то касательная
плоскость в точке

не существует.
Рассмотрим
геометрический
смысл первого дифференциала.
Используем
результаты, полученные выше.
Рассмотрим функцию
двух переменны
 .
.
Пусть точка

принадлежит области определения функции
z.
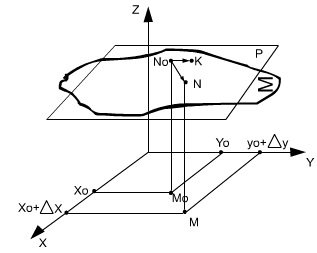
Тогда точка

лежит на
поверхности
 Фиксируем
Фиксируем
приращения
 .
.
Имеем:



точка
N
лежит на поверхности, точка M
лежит на плоскости, касающейся поверхности
в точке
 :
:
Пусть P
касательная
плоскость к поверхности

в точке


Пусть точка
 ,
,
где координата

удовлетворяет уравнению плоскости P.
Имеем:


Отсюда
получаем геометрический смысл первого
дифференциала:
первый
дифференциал
 геометрически
геометрически
равен приращению аппликаты точки
приращению
аппликаты точки касательной плоскости,
если переменным

приданы
приращения

Если функция z
дифференцируема
в точке ,
,
то верно соотношение ( точки K
и N
имеют совпадающие проекции на плоскость
OXY
)


Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Для более общей, но более технической обработки касательных векторов см. Касательное пространство .
В математике , А касательный вектор представляет собой вектор , который является касательной к кривой или поверхности в данной точке. Касательные векторы описываются в дифференциальной геометрии кривых в контексте кривых в R n . В более общем смысле , касательные векторы являются элементами касательного пространства в виде дифференцируемого многообразия . Касательные векторы также можно описать в терминах ростков . Формально касательный вектор в точке является линейным производным алгебры, определяемой множеством ростков в точке .
Мотивация
Прежде чем перейти к общему определению касательного вектора, мы обсудим его использование в исчислении и его тензорные свойства.
Исчисление
Позвольте быть параметрической гладкой кривой . Касательный вектор задается как , где мы использовали штрих вместо обычной точки для обозначения дифференцирования по параметру t . Единичный касательный вектор задается формулой


Пример
Учитывая кривую

в единичный касательный вектор в задается формулой

Контравариантность
Если задано параметрически в n -мерной системе координат x i (здесь мы использовали верхние индексы в качестве индекса вместо обычного нижнего индекса) посредством или
то касательное векторное поле задается формулой
При смене координат
касательный вектор в u i -системе координат задается формулой
где мы использовали соглашение Эйнштейна о суммировании . Следовательно, касательный вектор гладкой кривой при изменении координат преобразуется в контравариантный тензор первого порядка.
Определение
Позвольте быть дифференцируемой функцией и пусть быть вектором в . Определим производную по направлению в точке как


Касательный вектор в точке может быть определен как

Характеристики
Позвольте быть дифференцируемыми функциями, пусть быть касательными векторами в at , и пусть . потом
Касательный вектор на многообразиях
Пусть — дифференцируемое многообразие и пусть — алгебра вещественнозначных дифференцируемых функций на . Тогда касательный вектор к в точке на многообразии задается дифференцированием, которое должно быть линейным, т. Е. Для любого, и мы имеем
Обратите внимание, что вывод по определению будет обладать свойством Лейбница
Смотрите также
- Дифференцируемая поверхность # Касательная плоскость и вектор нормали
использованная литература
- ^ Дж. Стюарт (2001)
- ↑ Д. Кей (1988)
- ↑ А. Грей (1993)
Библиография
-
Грей, Альфред (1993), Современная дифференциальная геометрия кривых и поверхностей , Бока-Ратон: CRC Press.
- Стюарт, Джеймс (2001), Исчисление: концепции и контексты , Австралия: Томсон / Брукс / Коул.
- Кей, Дэвид (1988), Обзор теории и проблем тензорного исчисления Шаумсом , Нью-Йорк: МакГроу-Хилл.
1 Найти годограф вектор-функции
![]() .
.
Решение. Параметрические уравнения годографа есть
![]() ,
, ![]() ,
, ![]() .
.
Из первых двух уравнений исключаем параметр ![]() :
:
 .
.
Следовательно, годографом вектор-функции является окружность
![]() ,
, ![]() ,
,
Из которой исключена точка ![]() .
.
При изменении ![]() от
от ![]() до
до ![]() точка
точка ![]() на годографе движется от точки
на годографе движется от точки ![]() против часовой стрелки (если наблюдать из точки, расположенной выше плоскости
против часовой стрелки (если наблюдать из точки, расположенной выше плоскости ![]() ). При этом
). При этом
![]() ,
, ![]() .
.
2 Вычислить ![]() , если
, если ![]() .
.
Решение. Согласно определению
![]() .
.
3 Найти единичный касательный вектор годографа вектор-функции
![]()
При ![]() .
.
Решение. Параметрические уравнения годографа есть
![]() ,
, ![]() ,
, ![]() .
.
Найдем координаты направляющего вектора касательной к кривой ![]() :
:
![]() ,
,
В частности в точке ![]()
![]() .
.
Тогда единичный вектор годографа имеет вид
![]()
![]() .
.
4 Найти производную скалярного произведения векторов
![]() и
и ![]() .
.
Решение. Согласно свойствам дифференцируемых векторных функций, имеем
![]()
=![]()
![]()
![]() =
=![]() .
.
5 Дано уравнение движения ![]() . Определить траекторию и скорость движения.
. Определить траекторию и скорость движения.
Решение. Параметрические уравнения годографа есть
![]() ,
, ![]() ,
, ![]() .
.
Из первого уравнения исключим параметр ![]()
![]()
И подставим во второе
![]() .
.
Отсюда уравнение траектории движения
![]() ,
, ![]() .
.
Вектор скорости движения есть
![]() .
.
6 Написать уравнения касательной и нормальной плоскости к кривой
![]()
В точке ![]() .
.
Решение. Данной точке соответствует значение параметра ![]() .
.
Имеем
![]() ,
, ![]() ,
, ![]() .
.
Подставляя значение ![]() , получаем
, получаем
![]() ,
, ![]() ,
, ![]() .
.
Тогда уравнение касательной:
![]() ,
,
Уравнение нормальной плоскости:
![]()
Или ![]() .
.
7 Найти скорость и ускорение материальной точки ![]() , движущейся с постоянной угловой скоростью
, движущейся с постоянной угловой скоростью ![]() по окружности
по окружности
![]() .
.
Решение. Пусть ![]() – произвольная точка окружности. Обозначим через
– произвольная точка окружности. Обозначим через ![]() угол между радиус-вектором точки
угол между радиус-вектором точки ![]() и положительным направлением оси
и положительным направлением оси ![]() . По условию
. По условию
![]() ,
,
Где ![]() – время движения.
– время движения.
Выразим координаты точки ![]() как функции времени (рисунок 9.8):
как функции времени (рисунок 9.8):
![]() ,
,
![]() .
.
Следовательно, радиус-вектор точки ![]()
![]() ,
,
Скорость ![]() движения точки
движения точки ![]()
![]() ,
,
Модуль скорости
![]() .
.

Рисунок 9.8 – Геометрическая интерпретация задачи 7.
Скалярное произведение векторов ![]() и
и ![]() есть:
есть:
![]() ,
,
Т. е. векторы ![]() и
и ![]() перпендикулярны.
перпендикулярны.
Отсюда следует, что вектор ![]() направлен по касательной к окружности, по которой движется точка
направлен по касательной к окружности, по которой движется точка ![]() .
.
Найдем ускорение ![]() :
:
![]()
![]() .
.
Значит, векторы ![]() и
и ![]() имеют противоположные направления.
имеют противоположные направления.
Таким образом, ускорение материальной точки, движущейся с постоянной угловой скоростью по окружности, в каждый момент времени направлено к центру этой окружности.
8 К годографу винтовой линии (рисунок 9.9)
![]()
А) найти уравнения касательной прямой и нормальной плоскости в точке ![]() ;
;
Б) доказать, что касательная к винтовой линии образует постоянный угол с осью ![]() ;
;
В) записать натуральное уравнение винтовой линии;
Г) найти дифференциал длины дуги.

Рисунок 9.9 – Годограф функции
![]()
Решение. а) координаты точки касания ![]() есть:
есть:
![]() ,
, ![]() ,
, ![]() .
.
Координаты вектора ![]() :
:
![]() ,
, ![]() .
. ![]() .
.
Тогда уравнение касательной прямой имеет вид
 ,
,
А уравнение нормальной плоскости
![]() ;
;
Б) вектор касательный к годографу вектора ![]() :
:
![]() .
.
Тогда
 .
.
В) векторная функция ![]() является непрерывно дифференцируемой и
является непрерывно дифференцируемой и
![]() .
.
Тогда ![]() . Интегрируя обе части, получим
. Интегрируя обе части, получим ![]() . Из начального условия
. Из начального условия ![]() , имеем
, имеем ![]() . При этом длина винтовой линии равна
. При этом длина винтовой линии равна
![]() .
.
Следовательно, ![]() .
.
Отсюда натуральное уравнение винтовой линии в координатной форме запишется в виде:
 ,
,
Где ![]() .
.
Г) дифференциал длины дуги равен
![]() .
.
Для винтовой линии имеем
![]()
![]() .
.
| < Предыдущая | Следующая > |
|---|