Сила: что это за величина
В повседневной жизни мы часто встречаем, как любое тело деформируется (меняет форму или размер), ускоряется или замедляется, падает. В общем, чего только с разными телами в реальной жизни не происходит. Причиной любого действия или взаимодействия является сила.
Сила — это физическая векторная величина, которая является мерой действия одного тела на другое.
Она измеряется в ньютонах — это единица измерения названа в честь Исаака Ньютона.
Сила — величина векторная. Это значит, что, помимо модуля, у нее есть направление. От того, куда направлена сила, зависит результат действия этой силы.
Вот стоите вы на лонгборде: можете оттолкнуться вправо, а можете влево — в зависимости от того, в какую сторону оттолкнетесь, результат будет разный. В данном случае результат выражается в направлении движения.

Получай лайфхаки, статьи, видео и чек-листы по обучению на почту
Узнай, какие профессии будущего тебе подойдут
Пройди тест — и мы покажем, кем ты можешь стать, а ещё пришлём подробный гайд, как реализовать себя уже сейчас

Деформация
Деформация — это изменение формы и размеров тела (или части тела) под действием внешних сил
Происходит деформация из-за различных факторов: при изменении температуры, влажности, фазовых превращениях и других воздействиях, вызывающих изменение положения частиц тела.
На появление того или иного вида деформации большое влияние оказывает характер приложенных к телу сил. Одни процессы деформации связаны с преимущественно перпендикулярно (нормально) приложенной силой, а другие — преимущественно с силой, приложенной по касательной.
По характеру приложенной к телу нагрузки виды деформации подразделяют следующим образом:
-
Деформация растяжения
-
Деформация сжатия
-
Деформация сдвига
-
Деформация при кручении
-
Деформация при изгибе
Сила упругости: Закон Гука
Давайте займемся баскетболом. Начнем набивать мяч о пол, он будет чудесно отскакивать. Этот удар можно назвать упругим. Если при ударе деформации не будет совсем, то он будет называться абсолютно упругим.
Если вы перепутали мяч и взяли пластилиновый, он деформируется при ударе и не оттолкнется от пола. Такой удар будет называться абсолютно неупругим.
Деформацию тоже можно назвать упругой (при которой тело стремится вернуть свою форму и размер в изначальное состояние) и неупругой (когда тело не может вернуться в исходное состояние).
При деформации возникает сила упругости— это та сила, которая стремится вернуть тело в исходное состояние, в котором оно было до деформации.
Сила упругости, возникающая при упругой деформации растяжения или сжатия тела, пропорциональна абсолютному значению изменения длины тела. Выражение, описывающее эту закономерность, называется законом Гука.
Какой буквой обозначается сила упругости?
Закон Гука
—сила упругости [Н]
k — коэффициент жесткости [Н/м]
х — изменение длины (деформация) [м]
Важно раз
Изменение длины может обозначаться по-разному в различных источниках.
Варианты обозначений: x, ∆x, ∆l.
Это равноценные обозначения — можно использовать любое удобное.
Важно два
Поскольку сила упругости всегда направлена против деформации (она же стремится все «распрямить»), в Законе Гука должен быть знак минус. Часто его и можно встретить в разных учебниках. Но поскольку мы учитываем направление этой силы при решении задач, знак минус можно не ставить.
Задачка
На сколько удлинится рыболовная леска жесткостью 0,3 кН/м при равномерном (без ускорения) поднятии вверх рыбы весом 300 г?
Решение:
Сначала определим силу тяжести. Не забываем массу представить в единицах СИ – килограммах.
СИ — международная система единиц.
«Перевести в СИ» означает перевод всех величин в метры, килограммы, секунды и другие единицы измерения без приставок. Исключение составляет килограмм с приставкой «кило».
m = 300 г = 0,3 кг
Если принять ускорение свободного падения равным 10 м/с*с, то модуль силы тяжести равен :
F = mg = 0,3*10 = 3 Н.
Вспомним закон Гука:
И выразим из него модуль удлинения лески:
Так как одна сила уравновешивает другую, мы можем их приравнять:
Подставим числа, жесткость лески при этом выражаем в ньютонах:
= 0,01 м = 1 см
Ответ: удлинение лески равно 1 см.
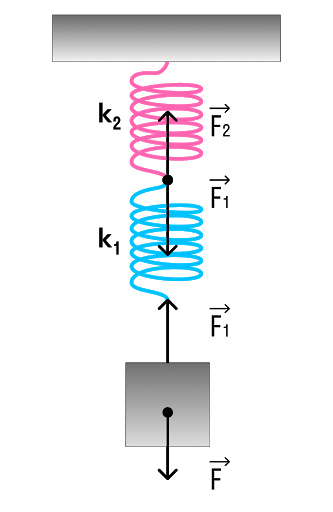
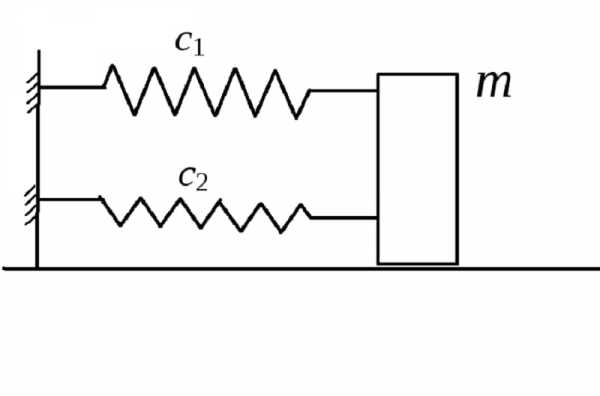
Параллельное и последовательное соединение пружин
В Законе Гука есть такая величина, как коэффициент жесткости— это характеристика тела, которая показывает его способность сопротивляться деформации. Чем больше коэффициент жесткости, тем больше эта способность, а как следствие из Закона Гука — и сила упругости.
Чаще всего эта характеристика используется для описания жесткости пружины. Но если мы соединим несколько пружин, то их суммарная жесткость нужно будет рассчитать. Разберемся, каким же образом.
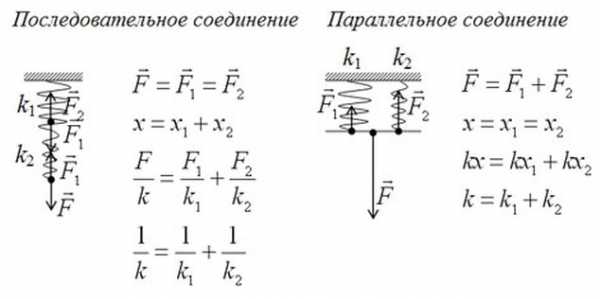
Последовательное соединение системы пружин
Последовательное соединение характерно наличием одной точки соединения пружин.
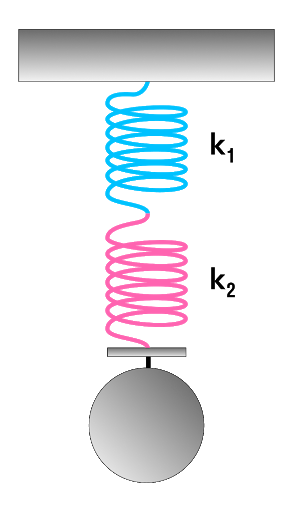
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
Коэффициент жесткости при последовательном соединении пружин
k — общая жесткость системы [Н/м]
k1, k2, …, ki — отдельные жесткости каждого элемента [Н/м]
i — общее количество всех пружин, задействованных в системе [-]
Параллельное соединение системы пружин
Последовательное соединение характерно наличием двух точек соединения пружин.
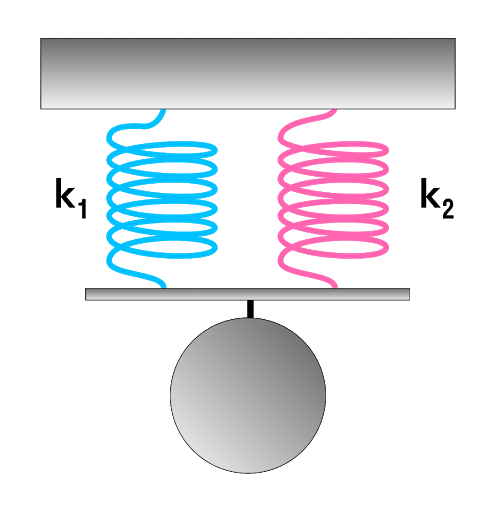
В случае когда пружины соединены параллельно величина общего коэффициента жесткости системы будет увеличиваться. Формула для расчета будет выглядеть так:
Коэффициент жесткости при параллельном соединении пружин
k — общая жесткость системы [Н/м]
k1, k2, …, ki — отдельные жесткости каждого элемента [Н/м]
i — общее количество всех пружин, задействованных в системе [-]
Задачка
Какова жесткость системы из двух пружин, жесткости которых k1 = 100 Н/м, k2 = 200 Н/м, соединенных: а) параллельно; б) последовательно?
Решение:
а) Рассмотрим параллельное соединение пружин.
При параллельном соединении пружин общая жесткость
k = k₁ + k₂ = 100 + 200 = 300 Н/м
б) Рассмотрим последовательное соединение пружин.
При последовательном соединении общая жесткость двух пружин
66,7 Н/м
Очень-очень важно!
Не забудь при расчете жесткости при последовательном соединении в конце перевернуть дробь.
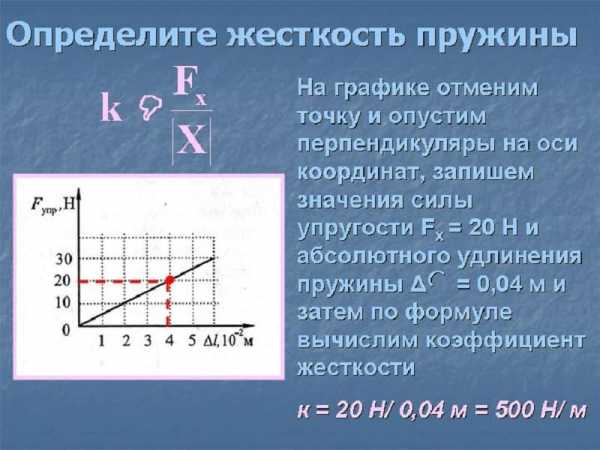
График зависимости силы упругости от жесткости
Закон Гука можно представить в виде графика. Это график зависимости силы упругости от изменения длины и по нему очень удобно можно рассчитать коэффициент жесткости. Давай рассмотрим на примере задач.
Задачка 1
Определите по графику коэффициент жесткости тела.
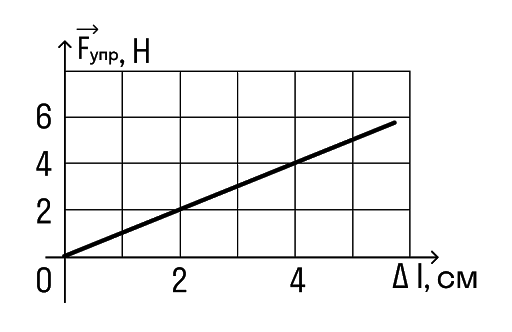
Решение:
Из Закона Гука выразим коэффициент жесткости тела:
F = kx
Снимем значения с графика. Важно выбрать одну точку на графике и записать для нее значения обеих величин.
Например, возьмем вот эту точку.
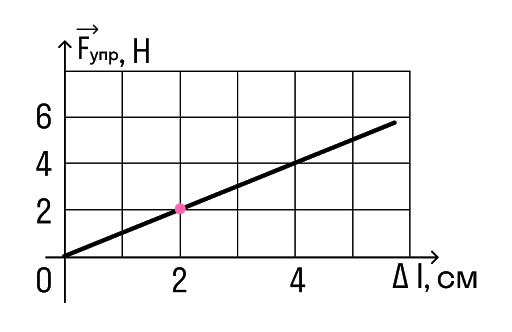
В ней удлинение равно 2 см, а сила упругости 2 Н.
Переведем сантиметры в метры:
2 см = 0,02 м
И подставим в формулу:
=100 Н/м
Ответ:жесткость пружины равна 100 Н/м
Онлайн-уроки физики в Skysmart не менее увлекательны, чем наши статьи!
Задачка 2
На рисунке представлены графики зависимости удлинения от модуля приложенной силы для стальной (1) и медной (2) проволок равной длины и диаметра. Сравнить жесткости проволок.
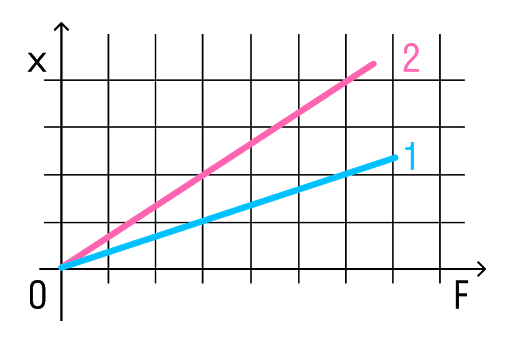
Решение:
Возьмем точки на графиках, у которых будет одинаковая сила, но разное удлинение.
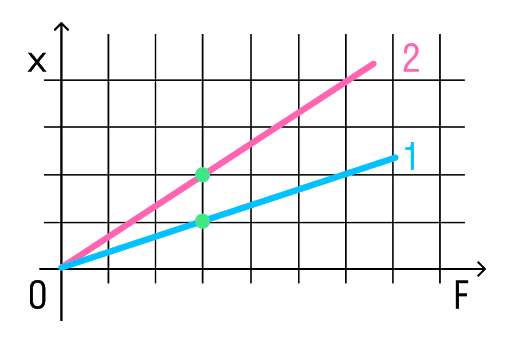
Мы видим, что при одинаковой силе удлинение 2 проволоки (медной) больше, чем 1 (стальной). Если выразить из Закона Гука жесткость, то можно увидеть, что она обратно пропорциональна удлинению.
Значит жесткость стальной проволоки больше.
Ответ: жесткость стальной проволоки больше медной.
Рано или поздно при изучении курса физики ученики и студенты сталкиваются с задачами на силу упругости и закон Гука, в которых фигурирует коэффициент жесткости пружины. Что же это за величина, и как она связана с деформацией тел и законом Гука?
Содержание:
- Сила упругости и закон Гука
- Определение коэффициента жесткости
- Расчет жесткости системы
- Последовательное соединение системы пружин
- Параллельное соединение системы пружин
- Вычисление коэффициента жесткости опытным методом
- Примеры задач на нахождение жесткости
- Видео
Сила упругости и закон Гука
Для начала определим основные термины, которые будут использоваться в данной статье. Известно, если воздействовать на тело извне, оно либо приобретет ускорение, либо деформируется. Деформация — это изменение размеров или формы тела под влиянием внешних сил. Если объект полностью восстанавливается после прекращения нагрузки, то такая деформация считается упругой; если же тело остается в измененном состоянии (например, согнутом, растянутом, сжатым и т. д. ), то деформация пластическая.
Примерами пластических деформаций являются:
- лепка из глины;
- погнутая алюминиевая ложка.
В свою очередь, упругими деформациями будут считаться:
- резинка (можно растянуть ее, после чего она вернется в исходное состояние);
- пружина (после сжатия снова распрямляется).
В результате упругой деформации тела (в частности, пружины) в нем возникает сила упругости, равная по модулю приложенной силе, но направленная в противоположную сторону. Сила упругости для пружины будет пропорциональна ее удлинению. Математически это можно записать таким образом:
F = — k·x;
где F — сила упругости, x — расстояние, на которое изменилась длина тела в результате растяжения, k — необходимый для нас коэффициент жесткости. Указанная выше формула также является частным случаем закона Гука для тонкого растяжимого стержня. В общей форме этот закон формулируется так: «Деформация, возникшая в упругом теле, будет пропорциональна силе, которая приложена к данному телу». Он справедлив только в тех случаях, когда речь идет о малых деформациях (растяжение или сжатие намного меньше длины исходного тела).

Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
k = F/x.
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Расчет жесткости системы
Встречаются более сложные задачи, в которых необходим расчет общей жесткости. В таких заданиях пружины соединены последовательно или параллельно.
Последовательное соединение системы пружин
При последовательном соединении общая жесткость системы уменьшается. Формула для расчета коэффициента упругости будет иметь следующий вид:
1/k = 1/k1 + 1/k2 + … + 1/ki,
где k — общая жесткость системы, k1, k2, …, ki — отдельные жесткости каждого элемента, i — общее количество всех пружин, задействованных в системе.

Параллельное соединение системы пружин
В случае когда пружины соединены параллельно, величина общего коэффициента упругости системы будет увеличиваться. Формула для расчета будет выглядеть так:
k = k1 + k2 + … + ki.
Измерение жесткости пружины опытным путем — в этом видео.
Вычисление коэффициента жесткости опытным методом
С помощью несложного опыта можно самостоятельно рассчитать, чему будет равен коэффициент Гука. Для проведения эксперимента понадобятся:
- линейка;
- пружина;
- груз с известной массой.
Последовательность действий для опыта такова:
- Необходимо закрепить пружину вертикально, подвесив ее к любой удобной опоре. Нижний край должен остаться свободным.
- При помощи линейки измеряется ее длина и записывается как величина x1.
- На свободный конец нужно подвесить груз с известной массой m.
- Длина пружины измеряется в нагруженном состоянии. Обозначается величиной x2.
- Подсчитывается абсолютное удлинение: x = x2-x1. Для того чтобы получить результат в международной системе единиц, лучше сразу перевести его из сантиметров или миллиметров в метры.
- Сила, которая вызвала деформацию, — это сила тяжести тела. Формула для ее расчета — F = mg, где m — это масса используемого в эксперименте груза (переводится в кг), а g — величина свободного ускорения, равная приблизительно 9,8.
- После проведенных расчетов остается найти только сам коэффициент жесткости, формула которого была указана выше: k = F/x.
Примеры задач на нахождение жесткости
Задача 1
На пружину длиной 10 см действует сила F = 100 Н. Длина растянутой пружины составила 14 см. Найти коэффициент жесткости.
- Рассчитываем длину абсолютного удлинения: x = 14—10 = 4 см = 0,04 м.
- По формуле находим коэффициент жесткости: k = F/x = 100 / 0,04 = 2500 Н/м.
Ответ: жесткость пружины составит 2500 Н/м.
Задача 2
Груз массой 10 кг при подвешивании на пружину растянул ее на 4 см. Рассчитать, на какую длину растянет ее другой груз массой 25 кг.
- Найдем силу тяжести, деформирующей пружину: F = mg = 10 · 9.8 = 98 Н.
- Определим коэффициент упругости: k = F/x = 98 / 0.04 = 2450 Н/м.
- Рассчитаем, с какой силой действует второй груз: F = mg = 25 · 9.8 = 245 Н.
- По закону Гука запишем формулу для абсолютного удлинения: x = F/k.
- Для второго случая подсчитаем длину растяжения: x = 245 / 2450 = 0,1 м.
Ответ: во втором случае пружина растянется на 10 см.
Видео
Из этого видео вы узнаете, как определить жесткость пружины.
Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Соединение пружин – Параллельное и последовательное соединение пружин
alexxlab | 16.10.2016 | 0 | Вопросы и ответы
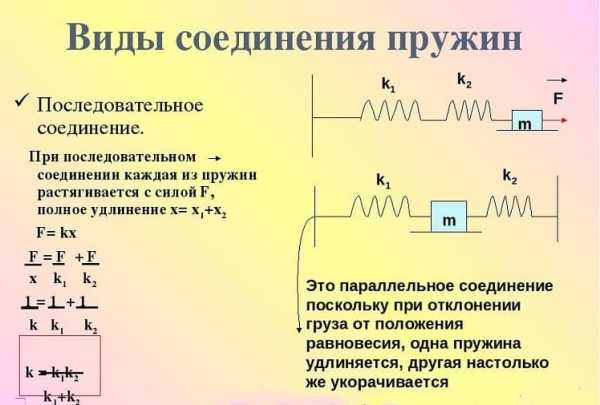
Параллельное и последовательное соединение пружин
Силу упругости обозначают буквой F с индексом Fупр.
Чтобы узнать, как найти силу упругости, мы должны познакомиться с законом Гука. Английский физик Роберт Гук впервые установил зависимость величины силы упругости от деформации тела. Эта зависимость прямо пропорциональная.
Чем больше возникает деформация, тем больше сила упругости.
То есть формула для силы упругости выглядит следующим образом:
Fупр=k*∆l,
где ∆l – величина деформации,
а k – коэффициент жесткости.Коэффициент жесткости , естественно, различен для разных тел и веществ. Коэффициент силы упругости измеряется в Н/м (ньютонах на метр).
На практике встречается часто, что пружина не одна, а несколько. Они образуют систему пружин.
Задача.
Какова жесткость системы из двух пружин, жесткости которых k1, k2, соединенных:
а) параллельно;
б) последовательно?
Решение:
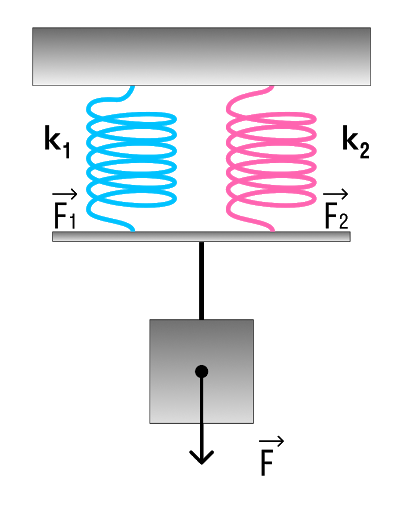
а) Рассмотрим параллельное соединение пружин. Обозначим удлинение пружин х1 и х2, х – перемещение груза. Тогда
x1 = x2 = x,
F=F1 + F2
и две пружины можно заменить одной пружиной жесткостью k, удлинение которой x.
Получим по закону Гука F = -kx:
kx = k1x1 + k2x2,
k= k1 + k2.
Итак, при параллельном соединении пружин общая жесткость
k = k1 + k2.
б) Рассмотрим последовательное соединение пружин. В этом случае по 3-ему закону Ньютона
∣F∣ = ∣F1∣ = ∣F2∣ (векторные)
и перемещение груза
x = x1 + x2.
Из закона Гука выразим удлинение
x = ∣F∣ / k
и запишем
∣F∣/ k = ∣F∣ / k1 + ∣F∣ / k2
Получим, что при последовательном соединении общая жесткость двух пружин
1 / k = 1 / k1+1 / k2
Подведем итоги в виде таблицы
Для случая, если пружин три и более:
На пружины действует одна и та же сила F.
Деформация системы пружин:
Δx = Δx1+ Δx2 + …+ Δxn = F / k1 + F / k2 +…+ F / kn.
F / k общ = F / k1 + F / k2 +…+ F / kn.
Посмотрим при решении задач:
spishy-u-antoshki.ru
Последовательное соединение пружин : жесткость, формула
Пружины являются важным элементом самых различных механизмов. Для изменения основных эксплуатационных свойств проводится использование нескольких подобных изделий, которые соединяются различным образом. Тип применяемого метода соединения учитывается при проведении самых различных расчетов.

Основные методы крепления пружин
При проведении расчетов уделяется внимание тому, каким образом проводится соединение пружин. Этот момент оказывает влияние на следующее:
- Жесткость системы. Этот показатель встречается практически во всех проводимых расчетах при последовательном подключении деталей. Зависит он от самых различных моментов, к примеру, коэффициента жесткости каждого.
- Требуемое усилие для сжатия или растяжения. Рассматриваемая деталь применяется часто по причине того, что может обеспечивает накопление кинетической энергии.
- Размер кинетической и потенциальной энергии. После того как изделие было выведено из положения равновесия начинает накапливаться кинетическая энергия. При этом она сохраняется на протяжении всего периода, пока к телу приложено усилие.
- Вероятность возникновения свободного колебательного движения, а также степень сопротивления подобному явлению. Для расчетов колебательного движения также применяются специальные формулы.
Бывают самые различные способы соединения пружин, но наибольшее распространение получил метод последовательного и параллельного подключения.
Они характеризуются довольно большим количеством особенностей. Прежде чем рассматривать применение подобных способов соединения следует уделить внимание особенностям самого изделия:
- Деталь изготавливается из проволоки, которая получается методом проката. Она обладает высоким показателем упругости, а также устойчивостью к воздействию окружающей среды.
- Прокат изготавливают из специального сплава, способного выдерживать периодическую деформацию. Под заказ может производится деталь из обычных углеродистых сплавов или легированных металлов, все зависит от конкретного случая.
- Проволока накручивается в виде колец по спирали. При этом должна выдерживаться едина ось, которая определяет распространение силы в одном направлении.
- Выделяют два основных типа детали: растяжения и сжатия. Первый вариант исполнения характеризуется тем, что витки находятся практически вплотную. В случае изготовления изделия для сжатия выдерживается определенный зазор, который позволяет кольцам сближаться, а самому изделию сжиматься.
- Характеризуется изделие самыми различными показателями. Примером можно назвать диаметр проволоки, созданных колец из нее, шаг расположения витков. Все эти параметры указываются в технической документации.
Сегодня они встречаются практически повсеместно. Это связано с тем, что подобное изделие практически незаменимо в случае, когда требуется возвратно-поступательное движение.
Последовательное соединение
При создании многих механизмов применяется последовательное соединение пружин. Среди особенностей этого метода отметим нижеприведенные моменты:
- Наиболее важным параметром можно назвать коэффициент жесткости. Он определяет практически все свойства детали. Коэффициент жесткости при последовательном соединении пружин равен каждому из показателей упругости.
- Также не стоит забывать о том, что показатель смещения тела равен сумме деформации витков. Любой тип рассматриваемого изделия характеризуется максимальным удлинение и сжатием. В случае максимального сжатия кольца расположены вплотную, зазор отсутствует практически полностью. При растяжении есть вероятность деформации витков, из-за чего изделие попросту потеряет свои основные характеристики.
Для расчетов могут применяться самые различные формулы. Среди особенностей этого метода соединения пружин отметим следующее:
- Для начала берется одна деталь с жесткостью K, сила растяжения выражается следующей формулой: x=F/k.
- Следующий шаг заключается в подсоединении второй детали. Для этого могут применяться различные крепежные элементы. При этом две пружины разной длины будут находится в одной системе.
- Если приложить усилие для растягивания обоих изделий, то сила упругости каждой будет равна по модулю. При этом удлинение каждой будет равно х.
Приведенная выше информация указывает на то, что упругость системы двух последовательно соединенных изделий будет примерно в два раза меньше. При этом удлинение будет равно сумме удлинения каждой в отдельности.
Применяемый метод соединения получил весьма широкое распространение. Однако, в некоторых случаях целесообразно применять параллельный метод соединения.
Параллельное соединение
Довольно часто встречается и параллельное соединение пружин. В этом случае смещение тела, которому передается сила, равна деформации каждой из них. Зачастую параллельно соединенные пружины используются тогда, когда нужно передать большее усилие. Особенностями этого метода назовем следующее:
- В рассматриваемом случае жесткости пружины обозначаются буквой k. Построенная схема указывает на то, что жесткость пружин при параллельном соединении остается неизменной, но общий показатель возрастает в два раза.
- Показатель удлинения остается неизменным. При этом сила упругости возрастает в два раза в случае, если обе детали обладают схожими эксплуатационными характеристиками.
Проблемой применения подобной системы можно назвать то, что обе детали должны обладать одинаковой длиной в состоянии покоя. В противном случае сила упругости будет распределяться неравномерно, при этом есть вероятность критической деформации одной из них.
Влияние сопротивления на свободные колебания
Особенности детали определяют то, что при ее применении есть вероятность возникновения свободного колебательного движения. При этом имеет значение, какими особенностями обладает параллельно и последовательно соединенные пружины. Среди особенностей влияния сопротивления на свободное колебание отметим следующие моменты:
- Проведенные тесты указывают на то, что параллельно соединенные пружины препятствуют возникновению свободного колебания. Это можно связать с существенным увеличением жесткости всей системы.
- При последовательном расположении есть вероятность снижения сопротивления, так как расстояние между точкой крепления и телом существенно увеличивается.
Именно поэтому для существенного снижения колебательного вращения на момент эксплуатации системы рекомендуется использовать параллельный метод подключения.
Динамика несвободного движения
Еще одним важным показателем можно назвать динамику несвободного движения. Она может варьировать в достаточно большом диапазоне.
Распространенные последовательно соединенные пружины могут обеспечивать условия для несвободного движения тела. Динамика может нарастать в зависимости от длины в свободном состоянии и передаваемого усилия.
Как определить жесткость системы при последовательном соединении пружин?
Довольно большое количество проблем возникает на момент вычисления жесткости системы при последовательном соединении. Особенностями проводимого расчета в этом случае назовем следующее:
- Важным показателем можно назвать жесткость, которая варьирует в достаточно большом диапазоне. Она во многом определяет свойства изделия. При слишком большой жесткости приходится прикладывать большее усилие для растяжения или сжатия детали.
- Телу придается определенное усилие (F), которое становится причиной удлинения тела на величину x.
- Для расчета применяется формула: k=F/(2x)=1/2F/x=k/2.
Приведенная выше информация указывает на то, что жесткость всей системы в этом случае в два раза меньше показателя жесткости каждого изделия. При этом формула применима только в том случае, если применяемые варианты исполнения для соединения обладают одинаковыми эксплуатационными характеристиками.
Определить жесткость системы пружин можно при самостоятельном проведении соответствующих расчетов. Сегодня система двух пружин получила весьма широкое распространение, так как при ее применении можно добиться требующихся результатов. Однако, прежде чем ее использовать следует провести соответствующие расчеты.
Если вы нашли ошибку, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
stankiexpert.ru
Параллельное соединение пружин
При параллельном соединении двух пружин, имеющих коэффициенты жесткости с1, с2 (рис. 2.5), смещение тела равно деформации каждой из пружин:
. (2.9)
Р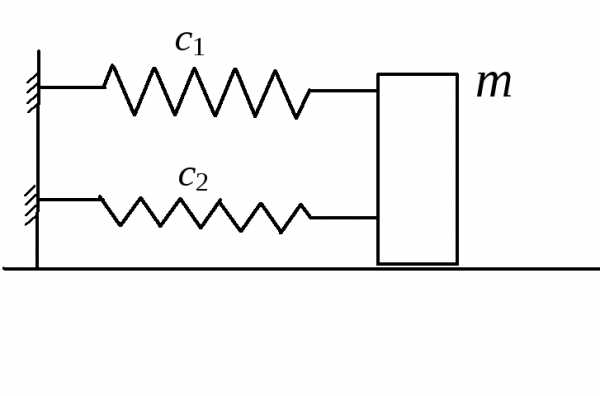 ис. 2.5 Параллельное соединение пружин
ис. 2.5 Параллельное соединение пружин
Сила упругости эквивалентной пружины с коэффициентом жесткости с* будет равна сумме сил упругости двух установленных пружин, откуда с учетом (2.9) получаем
,
окончательно
. (2.10)
Последовательное соединение пружин
При последовательном соединении двух пружин, имеющих коэффициенты жесткости с1, с2 (рис. 2.6), смещение тела равно сумме деформаций пружин:
. (2.11)
Рис. 3.6 Последовательное соединение пружин
Сила упругости эквивалентной пружины с коэффициентом жесткости с* будет равна каждой из сил упругости установленных пружин, откуда
,
,
откуда
Окончательно с учетом (2.11) получаем
. (2.12)
-
Влияние сопротивления на свободные колебания
Пусть на точку массы m, совершающую прямолинейное движение, действуют две силы (рис. 2.7):
-
Восстанавливающая сила (сила упругости пружины):
 .
. -
Сила сопротивления, пропорциональная скорости движения точки (сила сопротивления демпфера): .
 .
.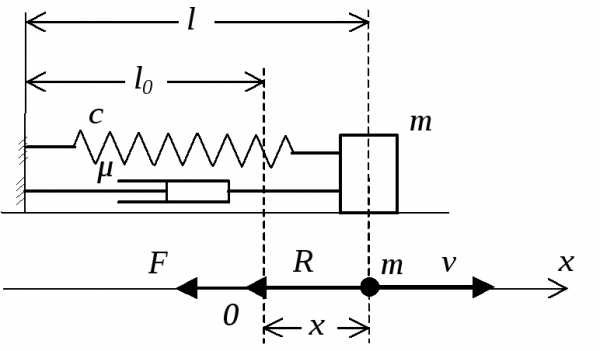
Рис. 2.7 Движение массы с демпфированием
Дифференциальное уравнение движения точки запишется как
;
,
обозначая
 ,
,  , (2.13)
, (2.13)
получаем линейное однородное дифференциальное уравнение 2-го порядка с постоянными коэффициентами:
. (2.14)
Характеристическое уравнение имеет вид
, (2.15)
его корни равны
, (2.16)
где – дискриминант.
Как известно из курса высшей математики, общее решение дифференциального уравнения (2.14) существенно зависит от знака дискриминанта , т.е. от соотношения между b и k.
1-й случай (малое сопротивление): b k , D 0.
Обозначим , причем k* k. Тогда корни (2.16) характеристического уравнения будут комплексно сопряженными:
,
Общее решение дифференциального уравнения (2.14) в данном случае имеет вид
, (2.17)
это затухающие колебания с частотой k* и периодом  (рис.3.8).
(рис.3.8).
Амплитуда колебаний убывает со временем. Отношение последующей амплитуды к предыдущей называется декрементом затухания:
 < 1 (2.18)
< 1 (2.18)
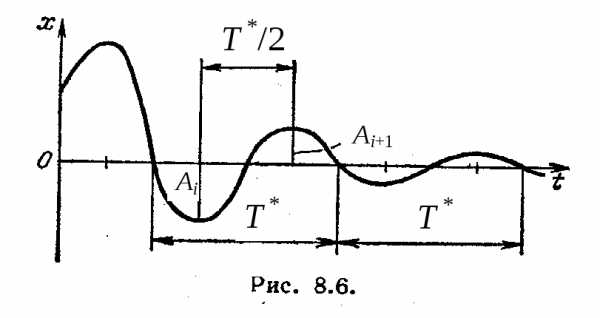
Рис. 2.8 Затухающие колебания
Часто используется также логарифмический декремент  .
.
Таким образом, амплитуды образуют геометрическую прогрессию с показателем q, меньшим единицы.
Видим также, что наличие сопротивления приводит к уменьшению частоты колебаний (k* k) и к увеличению их периода (Т* > Т).
2-й случай (граничный): b = k , D = 0.
Корни (2.16) характеристического уравнения получаются кратные, , и решение дифференциального уравнения (2.14) приобретает вид
. (2.19)
Поскольку экспонента убывает быстрее, чем растёт линейная функция времени, в зависимости от начальных условий движения получим ту или иную картину затухающего апериодического (т.е. не колебательного) движения (рис.2.9).
3-й случай (большое сопротивление): b > k, D > 0.
В этом случае обозначим >0, и оба корня (2.16) характеристического уравнения будут действительными и отрицательными:
< 0, < 0,
общее решение
. (2.20)
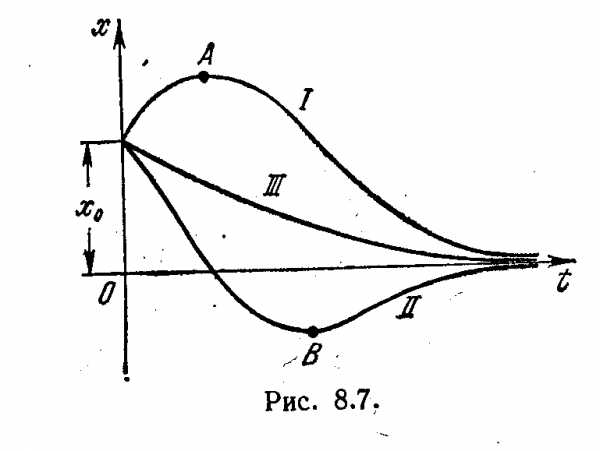
Рис. 2.9 График затухающего апериодического движения
Здесь также получаем затухающие апериодическое движение, графики будут такие же, как и в случае b= k.
studfiles.net
Репетитор-онлайн — подготовка к ЦТ
Пример 16. При последовательном соединении трех пружин, коэффициенты жесткости которых относятся как 1 : 2 : 3, сила 12 Н вызвала растяжение системы на 4,0 см. Рассчитать коэффициенты жесткости указанных пружин.
Решение. Величина силы упругости, действующей на пружину, определяется формулой
Fупр = kобщ∆x,
где kобщ — коэффициент жесткости составной пружины; ∆x — указанное в условии задачи растяжение пружины.
Величина силы упругости, с другой стороны, совпадает с величиной приложенной силы:
Fупр = F.
Значение данной силы и величина растяжения пружины под действием этой силы позволяют рассчитать коэффициент жесткости составной пружины:
kобщ=FΔx=124,0⋅10−2=300 Н/м.
Для определения коэффициентов жесткости каждой пружины запишем их коэффициенты жесткости в следующем виде:
- для первой пружины
k1 = k;
- для второй пружины
k2 = 2k;
- для третьей пружины
k3 = 3k,
так как указанные коэффициенты по условию задачи соотносятся между собой как
k1 : k2 : k3 = 1 : 2 : 3.
Для расчета величины k запишем формулу для коэффициента жесткости пружины, состоящей из трех последовательно соединенных пружин, и подставим в нее выражения k1, k2, k3:
1kобщ=1k1+1k2+1k3=1k+12k+13k=116k, или kобщ=6k11.
Найденное ранее значение kобщ = 300 Н/м позволяет рассчитать k = 550 Н/м.
Тогда коэффициенты жесткости каждой из пружин имеют значения:
- для первой пружины
k1 = k = 550 Н/м;
- для второй пружины
k2 = 2k = 1100 Н/м;
- для третьей пружины
k3 = 3k = 1650 Н/м.
vedy.by
Вопрос 8.4 Замена системы пружин эквивалентной пружиной
П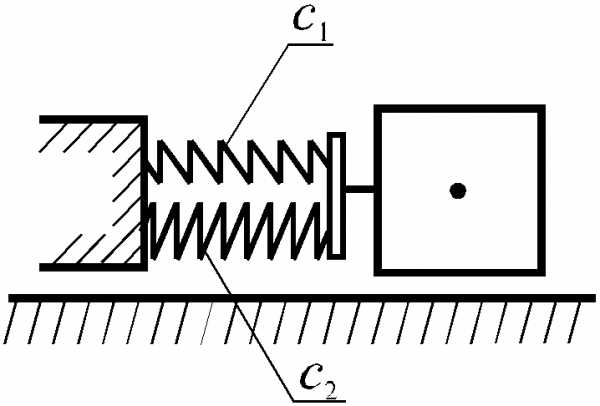 ри описании колебательного движения систему пружин, действующих на материальную точку, заменяют одной пружиной, жесткость которой равна жесткости системы. Эту пружину называют эквивалентной. Рассмотрим три основные схемы соединения пружин.
ри описании колебательного движения систему пружин, действующих на материальную точку, заменяют одной пружиной, жесткость которой равна жесткости системы. Эту пружину называют эквивалентной. Рассмотрим три основные схемы соединения пружин.
1 Параллельное соединение(рисунок 8.1).
П
Рисунок 8.1
араллельно соединенные пружины, если их деформации одинаковы, можно заменить эквивалентной пружиной, коэффициент жесткости которой равен сумме коэффициентов жесткости соединенных пружин,
.
2 Последовательное соединение(рисунок 8.2).
П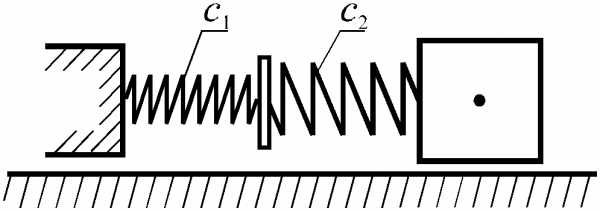 ри последовательном соединении нескольких пружин они могут быть заменены эквивалентной пружиной, податливость которой равна сумме податливостей соединенных пружин (податливостью пружины называют величину, обратную коэффициенту жесткости). Следовательно, коэффициент жесткости эквивалентной пружины в данном случае определяется следующим образом:
ри последовательном соединении нескольких пружин они могут быть заменены эквивалентной пружиной, податливость которой равна сумме податливостей соединенных пружин (податливостью пружины называют величину, обратную коэффициенту жесткости). Следовательно, коэффициент жесткости эквивалентной пружины в данном случае определяется следующим образом:
.
3
Рисунок 8.2
«Двухстороннее» соединение(рисунок 8.3).
П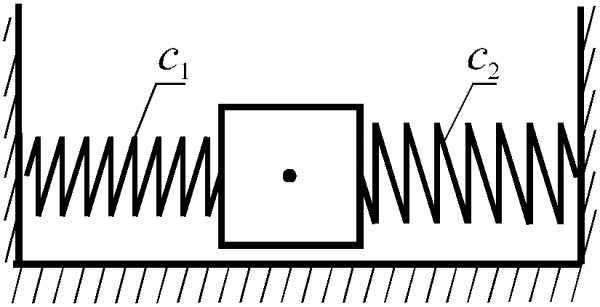 ри движении исследуемой материальной точки деформации обоих пружин будут одинаковы. Результирующая сила, действующая со стороны этих пружин на точку, будет равна сумме сил упругости в пружинах 1 и 2. Следовательно, коэффициент жесткости эквивалентной пружины будет равен сумме коэффициентов жесткости пружин 1 и 2:
ри движении исследуемой материальной точки деформации обоих пружин будут одинаковы. Результирующая сила, действующая со стороны этих пружин на точку, будет равна сумме сил упругости в пружинах 1 и 2. Следовательно, коэффициент жесткости эквивалентной пружины будет равен сумме коэффициентов жесткости пружин 1 и 2:
.
Любую систему пружин можно представить как набор рассмотренных схем.
Рисунок 8.3
Лекция 9 Динамика материальной системы.
(2 часа, 1 семестр, 2 курс)
Вопрос 9.1Теорема о движении центра масс материальной системы.
Центром масс материальной системы называют точку, радиус-вектор  которой определяется по формуле
которой определяется по формуле
 ,
,
где  – масса материальной системы;
– масса материальной системы;
mi, – масса и радиус-векторi-й материальной точки.
– масса и радиус-векторi-й материальной точки.
Координаты центра масс системы:
,
где xi,yi,zi– координаты центра массi-го тела системы.
При решении задач динамики материальной системы часто оказывается полезной теорема о движении центра масс:произведение массы материальной системы 
на ускорение ее центра массaC равно геометрической сумме внешних сил, приложенных к системе:
.
В ходе решения выражение теоремы проецируют на оси координат. При этом получается система уравнений
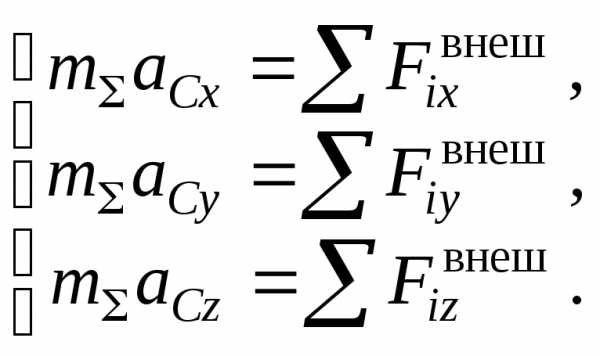
Использование теоремы о движении центра масс материальной системы для решения задач динамики рекомендуется осуществлять по следующей методике:
1 Изображается материальная система, и указываются все внешние силы, действующие на нее.
2 Выбираются оси координат.
3 Внешние силы, действующие на систему, проецируются на выбранные оси.
4 Записываются выражения координат центра масс системы через координаты центров масс одного из тел системы.
5 Дифференцируя выражения координат центра масс по времени, получают зависимости для скорости и ускорения центра масс системы.
6 Полученные выражения подставляются в систему динамических уравнений.
7 Решается дифференциальное уравнение относительно искомой координаты с учетом заданных начальных условий.
Вопрос 9.2Динамические уравнения движения твердого тела.
Динамические уравнения движения твердого тела устанавливают связь между кинематическими характеристиками движения тела и действующими на него силами.
Поступательное движение тела.В этом случае динамическое уравнение представляет собой следствие из теоремы о движении центра масс:
,
где m– масса тела;
 – ускорение центра масс тела;
– ускорение центра масс тела;
 –i-тая сила, действующая на тело.
–i-тая сила, действующая на тело.
При решении задач динамическое уравнение поступательного движения тела проецируют на оси координат.
Вращательное движение тела. Для него динамическое уравнение имеет вид:
,
где Jz– момент инерции тела относительно оси вращенияz;
– угловое ускорение тела;
Miz– моментi-й силы относительно оси вращения.
При составлении динамического уравнения вращательного движения тела выбирается направление отсчета угла поворота . Моменты сил, вращающих тело против выбранного направления, принимаются отрицательными, а по выбранному направлению – положительными.
Момент инерции Jz является мерой инертности тела при вращательном движении. Момент инерции материальной системы относительно данной осиOzопределяется как сумма произведений масс всех точек системы на квадраты их расстояний от этой оси:
.
Для абсолютно твердого тела суммирование по точкам системы заменяется интегрированием по объему
,
где ρ – плотность материала тела;
h– расстояние от точки с координатамиx,y,zдо осиOz.
Момент инерции JCтела относительно осиCz, проходящей через центр массC, называютцентральным моментом инерции. Если для тела известенрадиус инерцииi, то центральный момент
 .
.
Центральные моменты инерции некоторых тел:
1 Тонкий однородный стержень с массой mи длинойl:
 .
.
2 Тонкое круглое однородное кольцо с массой mи радиусомR:
 .
.
3 Круглый однородный диск с массой mи радиусомR:
 .
.
studfiles.net
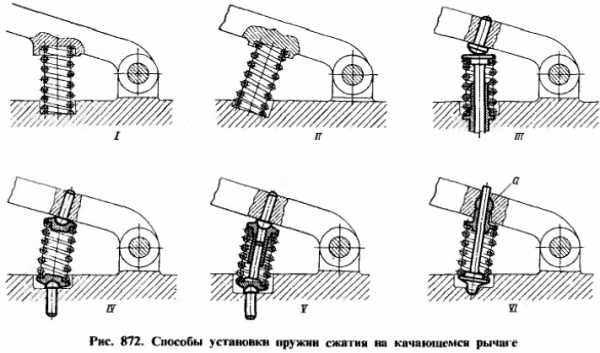
способ соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы – патент РФ 2378056
Изобретение относится к вибрационной технике и может быть использовано в различных отраслях хозяйственной деятельности. Способ соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы заключается в том, что пружины попарно соединяют с деталями колебательной системы стяжным соединением. Пружины базируют опорными торцовыми поверхностями концевых витков относительно деталей колебательной системы с помощью цилиндрических углублений и штифтов, входящих в эти углубления. Цилиндрические углубления выполняют на опорных торцовых поверхностях концевых витков пружин в количестве не менее двух на каждой опорной торцовой поверхности. Штифты устанавливают в сопрягаемых деталях колебательной системы. В результате уменьшается уровень шума и рассеяния энергии при резонансных колебаниях. 1 ил. 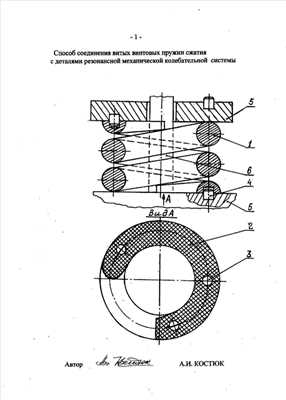
Рисунки к патенту РФ 2378056
Изобретение относится к вибрационной технике и может быть использовано в различных отраслях хозяйственной деятельности.
Известен способ соединения пружин сжатия с деталями механической колебательной системы, заключающийся в том, что пружины попарно соединяют с деталями колебательной системы с помощью стяжного соединения, причем пружины базируют относительно деталей колебательной системы с помощью углублений на этих деталях, в которые устанавливают пружины (см. рис.4 на стр.13 в книге: И.И.Быховский и др. Упругие элементы вибромашин. Обзор. ЦНИИТЭстроймаш. М., 1971).
Известен способ соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы, осуществленный в вибраторах с электромагнитным приводом моделей С-917 – С-921. Способ заключается в том, что пружины попарно соединяют с деталями колебательной системы с помощью стяжного соединения, причем пружины базируют опорными торцовыми и внутренними поверхностями концевых витков относительно деталей колебательной системы (см. стр.26 в книге: А.Н.Белоусов, Г.Г.Рекус. Вибраторы с электромагнитным приводом. Обзор. ЦНИИТЭстроймаш. М., 1969).
В качестве прототипа выбран способ соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы, заключающийся в том, что пружины попарно соединяют с деталями колебательной системы стяжным соединением, причем пружины базируют опорными торцовыми и наружными поверхностями концевых витков относительно деталей колебательной системы. Данный способ осуществлен в электромагнитном вибраторе серийного выпуска типа ВСРД (вибратор сбалансированный, резонансный, двухтактный) и описан на стр.10-11 в книге: М.В.Хвингия. Вибрации пружин. М.: Машиностроение, 1969.
Недостатком указанных аналогов и прототипа является высокий уровень шума, возникающего от соударения витков пружин с базирующими поверхностями, а также значительное рассеяние энергии при резонансных колебаниях, что обусловлено как соударениями витков пружин с базирующими поверхностями, так и микросдвигами опорных торцовых поверхностей концевых витков пружин относительно опорных поверхностей деталей колебательной системы.
Задачей изобретения является повышение эффективности способа соединения витых винтовых пружин сжатия с деталями резонансных механических колебательных систем.
Решение задачи достигается тем, что способ соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы заключается в том, что пружины попарно соединяют с деталями колебательной системы стяжным соединением, причем пружины базируют опорными торцовыми поверхностями концевых витков относительно деталей колебательной системы, при этом пружины базируют с помощью цилиндрических углублений и штифтов, входящих в эти углубления, цилиндрические углубления выполняют на опорных торцовых поверхностях концевых витков пружин в количестве не менее двух на каждой опорной торцовой поверхности, а штифты устанавливают в сопрягаемых деталях колебательной системы.
Применение предложенной совокупности существенных признаков позволяет в сравнении с прототипом получить новый технический результат: соединение витых винтовых пружин с деталями резонансной механической колебательной системы осуществляется без соударения витков пружин с базирующими поверхностями, при этом практически обеспечивается неподвижность опорных торцовых поверхностей концевых витков пружин на стыке с опорными поверхностями деталей колебательной системы. Благодаря этому уменьшается шум пружин и рассеяние энергии при резонансных колебаниях.
Анализ уровня техники в области машиностроения и вибрационной техники показал, что предложенная совокупность существенных признаков является новой, явным образом не следует из уровня техники, и, таким образом, предлагаемое изобретение является новым и имеет изобретательский уровень.
Сущность изобретения поясняется чертежом, на котором показана конструкция, реализующая предлагаемый способ. Конструкция включает витую винтовую пружину сжатия 1 с опорными торцовыми поверхностями 2 концевых витков и цилиндрическими углублениями 3 на них. Штифты 4, сопрягаемые с цилиндрическими углублениями пружины, установлены в деталях 5 резонансной механической колебательной системы. Пружина и детали колебательной системы стянуты стержнем 6 стяжного соединения (полная конструкция стяжного соединения на чертеже не показана).
Способ осуществляют следующим образом. На опорных торцовых поверхностях 2 витой винтовой пружины 1 выполняют не менее двух цилиндрических углублений 3. На деталях 5 колебательной системы устанавливают штифты 4. При этом координаты установки штифтов 4 и выполнения цилиндрических углублений 3 согласуют так, чтобы выполнить требования по базированию пружины 1 относительно деталей 5. Пружину 1 с помощью цилиндрических углублений 3 и штифтов 4 базируют относительно деталей 5 колебательной системы и стягивают стержнем 6 стяжного соединения.
В предлагаемом способе соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы решена задача изобретения – повышена эффективность способа соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы. Задача решена благодаря базированию пружин относительно деталей колебательной системы с помощью цилиндрических углублений и штифтов. Это позволило исключить в сравнении с прототипом соударение наружной поверхности витков пружины с базирующей поверхностью сопряженной детали колебательной системы. Кроме того, обеспечивается практическая неподвижность опорных торцовых поверхностей концевых витков пружин на стыке с опорными поверхностями деталей колебательной системы, поскольку штифты, входящие в цилиндрические углубления концевых витков пружин, препятствуют микросдвигам опорных торцовых поверхностей. Благодаря этому уменьшаются шум пружин и рассеяние энергии при резонансных колебаниях.
Возможность практического осуществления предложенного изобретения подтверждается следующими сведениями. Выполнение цилиндрических углублений в концевых витках пружин не вызывает затруднений для практической реализации. Однако возникает особенность, связанная с тем, что отверстия в концевых витках необходимо сверлить и калибровать в термообработанной на среднюю твердость пружинной стали. При использовании сверл и разверток, оснащенных пластинами из твердого сплава, обработка таких отверстий не вызывает затруднений (см. стр.275-276 в книге: Обработка металлов резанием: Справочник технолога. Под ред. А.А.Панова. – М.: Машиностроение, 1988).
Таким образом, предложенное изобретение промышленно применимо.
ФОРМУЛА ИЗОБРЕТЕНИЯ
Способ соединения витых винтовых пружин сжатия с деталями резонансной механической колебательной системы, заключающийся в том, что пружины попарно соединяют с деталями колебательной системы стяжным соединением, причем пружины базируют опорными торцовыми поверхностями концевых витков относительно деталей колебательной системы, отличающийся тем, что пружины базируют с помощью цилиндрических углублений и штифтов, входящих в эти углубления, цилиндрические углубления выполняют на опорных торцевых поверхностях концевых витков пружин в количестве не менее двух на каждой опорной торцевой поверхности, а штифты устанавливают в сопрягаемых деталях колебательной системы.
www.freepatent.ru
Коэффициент жесткости пружины, формула и примеры
Определение и формула коэффициента жесткости пружины
Сила упругости (), которая возникает в результате деформации тела, в частности пружины, направленная в сторону противоположную перемещению частиц, деформируемого тела, пропорциональна удлинению пружины:
Он зависит от формы тела, его размеров, материала из которого изготовлено тело (пружина).
Иногда коэффициент жесткости обозначают буквами D и с.
Величина коэффициента жёсткости пружины указывает на устойчивость ее к действию нагрузок и насколько велико ее сопротивление при воздействии.
Коэффициент жесткости соединений пружин
Если некоторое число пружин соединить последовательно, то суммарную жесткость такой системы можно вычислить как:
В том случае, если мы имеем дело с n пружинами, которые соединены параллельно, то результирующую жесткость получают как:
Коэффициент жесткости цилиндрической пружины
Рассмотрим пружину в виде спирали, которая сделана из проволоки с сечением круг. Если рассматривать деформацию пружины как совокупность элементарных сдвигов в ее объеме под воздействие сил упругости, то коэффициент жесткости можно вычислить при помощи формулы:
где — радиус пружины, — количество витков в пружине, — радиус проволоки, — модуль сдвига (постоянная, которая зависит от материала).
Единицы измерения
Основной единицей измерения коэффициента жесткости в системе СИ является:
В СГС:
= дин/см
Примеры решения задач
ru.solverbook.com
Особенности расчета жесткости соединений пружин
Важный моментом является расчет нескольких упругих элементов, соединенных последовательно или параллельно.
При параллельном расположении нескольких деталей общая жесткость этой системы определяется простой суммой коэффициентов отдельных комплектующих. Как нетрудно заметить, жесткость системы больше, чем отдельной детали.
При последовательном расположении формула более сложная: величина, обратная суммарной жесткости, равна сумме величин, обратных к жесткости каждой комплектующей. В этом варианте сумма меньше слагаемых.
Используя эти зависимости, легко определиться с правильным выбором упругих комплектующих для конкретного случая.
Определение коэффициента жесткости
Коэффициент жесткости (он также имеет названия коэффициента упругости или пропорциональности) чаще всего записывается буквой k, но иногда можно встретить обозначение D или c. Численно жесткость будет равна величине силы, которая растягивает пружину на единицу длины (в случае СИ — на 1 метр). Формула для нахождения коэффициента упругости выводится из частного случая закона Гука:
Чем больше величина жесткости, тем больше будет сопротивление тела к его деформации. Также коэффициент Гука показывает, насколько устойчиво тело к действию внешней нагрузки. Зависит этот параметр от геометрических параметров (диаметра проволоки, числа витков и диаметра намотки от оси проволоки) и от материала, из которого она изготовлена.
Единица измерения жесткости в СИ — Н/м.
Деформация.
Силы упругости возникают при деформациях тел. Деформация — это изменение формы и размеров тела. К деформациям относятся растяжение, сжатие, кручение, сдвиг и изгиб. Деформации бывают упругими и пластическими. Упругая деформация полностью исчезает после прекращения действия вызывающих её внешних сил, так что тело полностью восстанавливает форму и размеры. Пластическая деформация сохраняется (быть может, частично) после снятия внешней нагрузки, и тело уже не возвращается к прежним размерам и форме.
Частицы тела (молекулы или атомы) взаимодействуют друг с другом силами притяжения и отталкивания, имеющими электромагнитное происхождение (это силы, действующие между ядрами и электронами соседних атомов). Силы взаимодействия зависят о расстояний между частицами. Если деформации нет, то силы притяжения компенсируются силами отталкивания. При деформации изменяются расстояния между частицами, и баланс сил взаимодействия нарушается.
Например, при растяжении стержня расстояния между его частицами увеличиваются, и начинают преобладать силы притяжения. Наоборот, при сжатии стержня расстояния между частицами уменьшаются, и начинают преобладать силы отталкивания. В любом случае возникает сила, которая направлена в сторону, противоположную деформации, и стремится восстановить первоначальную конфигурацию тела.
Сила упругости — это сила, возникающая при упругой деформации тела и направленная в сторону, противоположную смещению частиц тела в процессе деформации. Сила упругости:
1. действует между соседними слоями деформированного тела и приложена к каждому слою; 2. действует со стороны деформированного тела на соприкасающееся с ним тело, вызывающее деформацию, и приложена в месте контакта данных тел перпендикулярно их поверхностям (типичный пример — сила реакции опоры).
Силы, возникающие при пластических деформациях, не относятся к силам упругости. Эти силы зависят не от величины деформации, а от скорости её возникновения. Изучение таких сил выходит далеко за рамки школьной программы.
В школьной физике рассматриваются растяжения нитей и тросов, а также растяжения и сжатия пружин и стержней. Во всех этих случаях силы упругости направлены вдоль осей данных тел.
Понятие жесткости
Жесткость как физическая величина характеризует силу, которую нужно приложить к пружине для достижения определенной степени растяжения или сжатия.
Коэффициент жесткости рассчитывается по формуле Гука:
где $F$ — сила, развиваемая пружиной, $k$ — коэффициент жесткости, зависящий от ее характеристик (см. выше) и измеряемый в ньютонах на метр, $x$ — абсолютное приращение расстояния, на которое изменилась длина пружины после приложения внешней силы. Знак минус в правой части формулы свидетельствует о том, что сила, порождаемая пружиной, действует в противоположном по отношению к нагрузке направлении.
Коэффициент жесткости можно вычислить экспериментально, подвешивая на расположенную вертикально и закрепленную за верхний конец пружину грузы с известной массой. В этом случае имеет место зависимость
$m cdot g — k cdot x = 0$,
где $m$ — масса, $g$ — ускорение свободного падения. Отсюда
Сила упругости.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: силы в механике, сила упругости, закон Гука.
Как мы знаем, в правой части второго закона Ньютона стоит равнодействующая (то есть векторная сумма) всех сил, приложенных к телу. Теперь нам предстоит изучить силы взаимодействия тел в механике. Их три вида: сила упругости, гравитационная сила и сила трения. Начинаем с силы упругости.
Как появился первый вариант формулы
Формула для расчета жесткости пружины, которая получила название закона Гука, была установлена экспериментально. В процессе опытов с подвешенными на упругом элементе грузами разной массы замерялась величина его растяжения. Так и выяснилось, что одна и та же испытуемая деталь под разными нагрузками претерпевает различные деформации. Причем подвешивание определенного количества гирек, одинаковых по массе, показало, что каждая добавленная/снятая гирька увеличивает/уменьшает длину упругого элемента на одинаковую величину.
В итоге этих экспериментов появилась такая формула: kx=mg, где k – некий постоянный для данной пружины коэффициент, x – изменение длины пружины, m – ее масса, а g – ускорение свободного падения (примерное значение – 9,8 м/с²).
Так было открыто свойство жесткости, которое, как и формула для определения коэффициента упругости, находит самое широкое применение в любой отрасли промышленности.
Закон Гука.
Деформация называется малой, если изменение размеров тела много меньше его первоначальных размеров. При малых деформациях зависимость силы упругости от величины деформации оказывается линейной.
Закон Гука. Абсолютная величина силы упругости прямо пропорциональна величине деформации. В частности, для пружины, сжатой или растянутой на величину , сила упругости даётся формулой:
где — коэффициент жёсткости пружины.
Коэффициент жёсткости зависит не только от материала пружины, но также от её формы и размеров.
Из формулы (1) следует, что график зависимости силы упругости от (малой) деформации является прямой линией (рис. 1 ):
Коэффициент жёсткости — о угловой коэффициент в уравнении прямой . Поэтому справедливо равенство:
где — угол наклона данной прямой к оси абсцисс. Это равенство удобно использовать при экспериментальном нахождении величины .
Подчеркнём ещё раз, что закон Гука о линейной зависимости силы упругости от величины деформации справедлив лишь при малых деформациях тела. Когда деформации перестают быть малыми, эта зависимость перестаёт быть линейной и приобретает более сложный вид. Соответственно, прямая линия на рис. 1 — это лишь небольшой начальный участок криволинейного графика, описывающего зависимость от при всех значениях деформации .
Примеры задач с решением
Задание. Пружина в отсутствии нагрузки имеет длину $l=0,01$ м и жесткость равную 10 $frac. $Чему будет равна жесткость пружины и ее длина, если на пружину действовать силой $F$= 2 Н? Считайте деформацию пружины малой и упругой.

Решение. Жесткость пружины при упругих деформациях является постоянной величиной, значит, в нашей задаче:
При упругих деформациях выполняется закон Гука:
[F=kDelta l left(1.2right).]
Из (1.2) найдем удлинение пружины:
Длина растянутой пружины равна:
Вычислим новую длину пружины:
Ответ. 1) $k’=10 frac$; 2) $l’=0,21$ м
Задание. Две пружины, имеющие жесткости $k_1$ и $k_2$ соединили последовательно. Какой будет удлинение первой пружины (рис.3), если длина второй пружины увеличилась на величину $Delta l_2$?
Решение. Если пружины соединены последовательно, то деформирующая сила ($overline$), действующая на каждую из пружин одинакова, то есть можно записать для первой пружины:
Для второй пружины запишем:
Если равны левые части выражений (2.1) и (2.2), то можно приравнять и правые части:
[k_1Delta l_1=k_2Delta l_2left(2.3right).]
Из равенства (2.3) получим удлинение первой пружины:
Ответ. $Delta l_1=frac$
Как найти удлинение пружины?
Эта формула, а точнее закон Гука, выглядит так: F=|kx|, где k – это коэффициент упругости пружины, x – это удлинение пружины или же, как её ещё называют, величина деформации пружины.
Интересные материалы:
Что происходит с внутренней энергией воды при нагревании? Что происходит с водой при нагревании и при охлаждении? Что происходит с водой в ночь на 19 января? Что стало причиной уменьшения стока воды в Аральское море? Что такое мутить воду? Что такое нерастворимые в воде вещества? Что такое пудровая туалетная вода? Что такое тестер туалетная вода? Что такое вода для 2 класса? Что такое вода для инъекций?