Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы Траектория и Путь), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.
На рис. 1.1:
![]()
Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия.
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).
Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения ![]() (см.рис. 1.3).
(см.рис. 1.3).
Выберем ось ОХ так, чтобы вектор ![]() лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
Sx = AxBx
ВАЖНО!
Напоминаю для тех, кто не очень хорошо знает математику: не путайте вектор ![]() с проекцией вектора на какую-либо ось (например, Sx). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.
с проекцией вектора на какую-либо ось (например, Sx). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.
Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть
Sx = x – x0
Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
Sy = y – y0 Sz = z – z0
Здесь x0, y0, z0 — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).
Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х0 и у0, то есть А(х0, у0). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).
Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
Sx = x – x0 Sy = y – y0
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора, с помощью которой можно найти модуль вектора перемещения, так как
АС = sx CB = sy
По теореме Пифагора
S2 = Sx2 + Sy2
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:
![]()
Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
Конспект по физике для 8 класса «Перемещение и описание движения». Как определить координаты тела, движущегося равномерно и прямолинейно. Что такое уравнение движения.
Конспекты по физике Учебник физики Тесты по физике
Перемещение и описание движения
Система отсчёта используется для того, чтобы определить положение тела в пространстве в некоторый момент времени. В случае когда тело движется, возникает задача вычисления его координат в некоторые моменты времени.
ПРОЕКЦИИ ПЕРЕМЕЩЕНИЯ НА КООРДИНАТНЫЕ ОСИ
Если известен вектор перемещения тела, то при расчетах, как правило, используют не координаты вектора, как такового, а его проекции на оси координат. Если опустить перпендикуляры из начала и конца вектора перемещения s на координатную ось X, то получится отрезок sx, который называют проекцией перемещения. При этом проекция вектора на ось считается положительной, если координата конца вектора перемещения оказывается больше координаты его начала. В противном случае проекция считается отрицательной.
Если вектор и ось параллельны, то длина вектора равна его проекции на эту ось.

При решении многих задач необходимо уметь находить проекции вектора перемещения на координатные оси. Если (х0; у0) и (х; у) — координаты начала и конца вектора, то его проекции на оси абсцисс и ординат будут равны соответственно
sx = x – x0, (1)
sy = y – y0
Зная проекции вектора перемещения, можно найти его длину (модуль) по теореме Пифагора:
![]()
ОПРЕДЕЛЕНИЕ КООРДИНАТ ДВИЖУЩЕГОСЯ ТЕЛА И ЕГО ПЕРЕМЕЩЕНИЯ
Если тело движется прямолинейно, то траектория его движения совпадает с перемещением. При этом пройденный телом путь равен значению модуля вектора перемещения.

А как описать движение тела в более сложном случае? На рисунке представлен график движения самолёта. Сначала он набирал высоту, двигаясь из точки А в точку В, затем двигался на одной и той же высоте (до точки С) и, наконец, приземлился в точке D. На какой высоте проходил полёт? Высоте полёта соответствуют координаты по оси OY, значит, в точке В самолёт набрал высоту 3 км.
Теперь ответим на вопрос: какой путь проделал самолёт на этой высоте? Проекция перемещения s2x = 80 — 20 = 60 км.
Так как всё это время самолёт двигался параллельно оси ОХ, длина вектора перемещения равна его проекции на эту ось. Следовательно, модуль перемещения самолёта из точки В в точку С равен 60 км. Этому же значению равен и путь самолёта из точки В в точку С.
И наконец, определим дальность полёта самолёта. Для этого нам надо найти модуль перемещения самолёта из точки А в точку D: |s| = sx = 100 — 0 = 100 км.
Таким образом, при помощи перемещения и его проекций мы описали сложное движение самолёта.
ПЕРЕМЕЩЕНИЕ И СКОРОСТЬ ПРИ РАВНОМЕРНОМ ПРЯМОЛИНЕЙНОМ ДВИЖЕНИИ
Так как при прямолинейном движении пройденный телом путь равен значению модуля вектора перемещения, мы можем сказать, что скоростью равномерного прямолинейного движения называют векторную величину, равную отношению перемещения тела ко времени, за которое это перемещение произошло. При равномерном прямолинейном движении векторы скорости и перемещения направлены в одну сторону. Зная скорость равномерного движения, можно найти перемещение тела за любой промежуток времени:
![]()
Поскольку скорость υ является векторной величиной, её тоже можно изобразить графически. Обозначим её проекцию на координатную ось υx. Если направление координатной оси совпадает с направлением движения тела, то для расчёта перемещения тела можно использовать формулу
![]()
УРАВНЕНИЕ ДВИЖЕНИЯ
Уравнение зависимости координаты тела от времени называют уравнением движения.
Пусть тело совершило перемещение s. Направим координатную ось X по направлению перемещения тела. Обозначим начальную координату тела х0, а конечную координату тела х. Тогда по формуле (1) sx = х – х0.
Но по формуле (3) sx = υxt. Следовательно,

Таким образом, координату тела при равномерном прямолинейном движении в любой момент времени можно определить, если известны его начальная координата и проекция скорости движения на ось X.
Ранее при решении задач мы использовали формулу s = υt без стрелочек. Почему? Символом s здесь обозначался путь, пройденный телом, а символом и — модуль скорости. Теперь нам известно, что при равномерном прямолинейном движении путь равен модулю перемещения. Поэтому если нас не интересует направление движения тела, а необходимо только найти его путь, то эта формула поможет нам найти решение.
Вы смотрели Конспект по физике для 8 класса «Перемещение и описание движения».
Вернуться к Списку конспектов по физике (Оглавление).
Просмотров: 13 233
Используя вектор перемещения, мы можем показать положение движущегося тела в определенный момент времени графически, но на практике нам необходим не рисунок, а определенные координаты. Их мы можем вычислить, чем и займемся на данном уроке.
Использование физических величин и понятий для вычислений
Определяя координаты движущегося тела, мы будем использовать модель материальной точки. Также нам потребуется система отсчета: нужно будет определиться с количеством координатных осей и их расположением относительно движущегося тела.
С какими величинами производят вычисления — с векторными или скалярными?
Обратите внимание, что мы не можем производить арифметические вычисления с векторами. Поэтому мы будем использовать соответствующие им скалярные величины — их модули и их проекции на координатные оси.
Проекция вектора перемещения
Проекция любого вектора строится по двум его точкам: начальной и конечной. Поэтому сначала мы рассмотрим, что же такое проекция точки на координатную ось.
Проекция точки — это основание перпендикуляра, опущенного из данной точки на ось.
Взгляните на рисунок 1. Точка $A_x$ является проекцией точки $A$ на ось OX, а точка $A_y$ — проекцией точки $A$ на ось OY.

Теперь перейдем к проекции вектора (рисунок 2).
Проекция вектора на ось — это длина отрезка, образованного проекциями начала и конца вектора на эту ось.

Соответственно, чтобы получить проекцию вектора перемещения на ось OX, мы сначала построили проекции точек $A$ и $B$ ($A_x$ и $B_x$). Отрезок на координатной оси, образованный этими точками (а точнее — длина этого отрезка) и будет являться проекцией вектора перемещения $vec s$ на ось OX — $s_x$.
Вектор перемещения и определение координаты тела
Рассмотрим разные варианты. Начнем с самого простого. Пусть наше тело двигалось из точки $1$ в точку $2$ прямолинейно. Изобразим вектор его перемещения $vec s$ (рисунок 3).

Движение происходило вдоль прямой. Значит, нам потребуется всего одна координатная ось. Ее направление будет совпадать с направлением движения тела. Далее нам нужно определить проекцию вектора перемещения на оси OX. Для этого мы сначала определяем координаты точек $1$ и $2$ (рисунок 4). Проекции этих точек на ось и будут являться их координатами.
Как мы это делаем? Опускаем из точки $1$ перпендикуляр на координатную ось и получаем координату этой точки — $x_1$. То же самое проделываем с точкой $2$ и получаем ее координату — $x_2$. Отмечаем на чертеже проекцию вектора перемещения $s_x$.

Чему равна эта проекция вектора перемещения?
Проекция перемещения — это разность конечной и начальной координат:
$s_x = x_2 space − space x_1$.
Обратите внимание, что в данном случае проекция вектора перемещения $s_x$ равна модулю перемещения $|vec s|$.
Если мы знаем начальную координату и перемещение, то сможем найти конечную координату тела по формуле:
$x_2 = x_1 space + space s_x$.
Направление вектора перемещения не совпадает с направлением координатной оси
Рассмотрим случай, если вектор перемещения направлен противоположно координатной оси (рисунок 5).

Опустив перпендикуляры на ось OX, получим координаты точек $1$ и $2$ ($x_1$ и $x_2$). По определению проекция перемещения $s_x$ будет равна:
$s_x = x_2 space − space x_1$.
Что изменилось? $x_1 > x_2$, поэтому рассчитывая проекцию перемещения, мы получим отрицательное число.
При каком условии проекция вектора на ось будет положительной, а при каком — отрицательной?
Если проекция вектора перемещения представляет собой отрицательное число, то тело движется в противоположную сторону от направления координатной оси.
При этом конечная координата тела будет определяться точно так же, как и в предыдущем случае:
$x_2 = x_1 space + space s_x$.
Вектор перемещения находится под углом к оси координат
Если вектор перемещения расположен под некоторым углом к оси OX, то нам потребуется вторая ось OY. Теперь мы должны определить две проекции вектора перемещения: $s_x$ и $s_y$ (рисунок 6).

Определяем эти проекции:
$s_x = x_2 space − space x_1$,
$s_y = y_2 space − space y_1$.
Обратите внимание, что эти проекции получаются меньше самого вектора перемещения, ведь они не совпадают с ним. Поэтому мы будем их использовать, чтобы найти модуль перемещения $|vec s|$ по теореме Пифагора (рисунок 7):
$|vec s| = sqrt{{s_x}^2 space + space {s_y}^2}$.

В случае вектора, расположенного под углом к оси, действует правило, проиллюстрированное на рисунке 8.
Проекция вектора является положительной, если угол между вектором и осью острый, и отрицательной, если угол тупой.

А если вектор перпендикулярен оси? Тогда проекция этого вектора равна нулю (рисунок 9).

Пример решения задачи
Два катера идут по реке в противоположных направлениях и встречаются в $100 space км$ к востоку от пристани П (рисунок 10). Продолжая движение, за некоторый промежуток времени $t$ первый катер переместился от места встречи на $60 space км$ к востоку, а второй — на $50 space км$ к западу. Определите координаты каждого катера относительно пристани и расстояние между катерами через промежуток времени $t$ после их встречи.

Для того, чтобы записать условия задачи и решить ее, нам нужно выбрать координатную ось и спроецировать на нее векторы перемещений двух катеров. Проведем координатную ось OX параллельно движению катеров. Точку O (начало координат: $x = 0$) совместим с пристанью П.
Теперь спроецируем векторы перемещений на ось OX. Мы получаем два отрезка: $s_{1x}$ и $s_{2x}$ (рисунок 11).

Далее мы смотрим, какой знак будут иметь эти проекции:
- вектор $vec s_1$ сонаправлен оси OX, поэтому $s_{1x} > 0$;
- вектор $vec s_2$ направлен противоположно оси OX, поэтому $s_{2x} < 0$.
Вот теперь мы можем записать условия задачи и перейти к ее решению.
Дано:
$x_0 = 100 space км$
$s_{1x} = 60 space км$
$s_{2x} = −50 space км$
$x_1 — ?$
$x_2 — ?$
$l — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Из рисунка 11 видно, что мы можем определить конечные координаты катеров по формулам:
$x_1 = x_0 space + space s_{1x}$,
$x_2 = x_0 space + space s_{2x}$.
Рассчитаем эти координаты:
$x_1 = 100 space км space + space 60 space км = 160 space км$,
$x_2 = 100 space км space − space 50 space км = 50 space км$.
Расстояние между двумя катерами будет равно модулю разности их координат:
$l = |x_1 space − space x_2|$,
$l = |160 space км space − space 50 space км| = 110 space км$.
Ответ: $x_1 = 160 space км$, $x_2 = 50 space км$, $l = 110 space км$.
Упражнения
Упражнение №1
Мотоциклист, переехав через мост, движется по прямолинейному участку дороги. У светофора, находящегося на расстоянии $10 space км$ от моста, мотоциклист встречает велосипедиста. За $0.1 space ч$ с момента встречи мотоциклист перемещается на $6 space км$, а велосипедист — на $2 space км$ от светофора (при этом оба они продолжают двигаться прямолинейно в противоположных направлениях).
Определите координаты мотоциклиста и велосипедиста и расстояние между ними спустя $0.1 space ч$ после их встречи.
Начертим ось OX, направив ее в сторону движения мотоциклиста и приняв за тело отсчета мост (рисунок 12). Обозначим на этой оси координату светофора ($x_с$), координаты велосипедиста ($x_в$) и мотоциклиста ($x_м$), которые они имели через $0.1 space ч$ после встречи. Над осью обозначим векторы перемещений велосипедиста ($vec s_в$) и мотоциклиста ($vec s_м$), а на оси — проекции этих векторов ($s_{вx}$ и $s_{мx}$).

Дано:
$x_с = 10 space км$
$x_{мx} = 6 space км$
$x_{вx} = −2 space км$
$x_м — ?$
$x_в — ?$
$l — ?$
Посмотреть решение и ответ
Скрыть
Решение:
Сначала вычислим конечную координату мотоциклиста:
$x_м = x_с space + space s_{мx}$,
$x_м = 10 space км space + space 6 space км = 16 space км$.
Теперь рассчитаем конечную координату велосипедиста:
$x_в = x_с space + space s_{вx}$.
$x_в = 10 space км space − space 2 space км = 8 space км$.
Расстояние между мотоциклистом и велосипедистом будет равно модулю разности их координат:
$l = |x_м space − space x_в$,
$l = |16 space км space − space 8 space км| = 8 space км$.
Ответ: $x_м = 16 space км$, $x_в = 8 space км$, $l = 8 space км$.
Упражнение №2
Мальчик держит в руках мяч на высоте $1 space м$ от поверхности земли. Затем он подбрасывает мяч вертикально вверх. За некоторый промежуток времени $t$ мяч успевает подняться на $2.4 space м$ от своего первоначального положения, достигнув при этом точки наибольшего подъема, и опуститься от этой точки на $1.25 space м$ (рисунок 13).
Пользуясь этим рисунком, определите:
а) координату $x_0$ начального положения мяча;
б) проекцию $s_{tx}$ вектора перемещения $vec s_t$, совершенного мячом за время $t$;
в) координату $x_t$, которую имел мяч через промежуток времени $t$ после броска.

Дано:
$x_0 = 1 space м$
$s_{1x} = 2.4 space м$
$s_{2x} = −1.25 space м$
$x_0 — ?$
$s_{tx} — ?$
$x_t — ?$
Посмотреть решение и ответ
Скрыть
Решение:
На рисунке 13 мы видим, что начало оси OX совпадает с поверхностью земли. Также в условии задачи сказано, что мальчик держит мяч на высоте, равной $1 space м$. Это и есть координата начального положения мяча: $x_0 = 1 space м$.
Что такое вектор перемещения $s_t$? По определению это вектор, соединяющий начальное положение тела с его конечным положением в пространстве. Начальное положение мяча — это координата $x_0$, а конечное положение — координата $x_t$. При этом мяч сначала летел вверх (вектор перемещения $vec s_1$) , а потом вниз (вектор перемещения $vec s_2$). Если мы сложим эти векторы, то получим итоговый вектор перемещения $vec s_t$, показанный на рисунке 13.
Далее мы используем формулу с рисунка, не забывая при этом о знаках векторов, чтобы рассчитать проекцию вектора перемещения $s_{tx}$:
$s_{tx} = s_{1x} space + space s_{2x}$,
$s_{tx} = 2.4 space м space − space 1.25 space м = 1.15 space м$.
Теперь найдем координату мяча, в которой он оказался по прошествии времени $t$. Из рисунка 13 видно, что:
$x_t = x_0 space + space s_{tx}$,
$x_t = 1 space м space + 1.15 space м = 2.25 space м$.
Ответ: $x_0 = 1 space м$, $s_{tx} = 1.15 space м$, $x_t = 2.25 space м$.
Механическое движение. Траектория. Путь. Перемещение

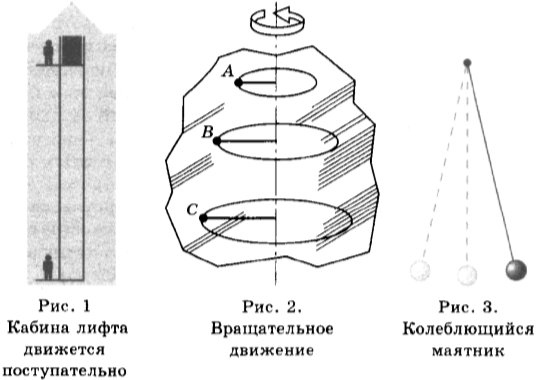
1. Механическим движением называют изменение положения тела в пространстве относительно других тел с течением времени. Существуют различные виды механического движения. Если все точки тела движутся одинаково и любая прямая, проведённая в теле, при его движении остаётся параллельной самой себе, то такое движение называется поступательным (рис. 1).
Точки вращающегося колеса описывают окружности относительно оси этого колеса. Колесо как целое и все его точки совершают вращательное движение (рис. 2).
Если тело, например шарик, подвешенный на нити, отклоняется от вертикального положения то в одну, то в другую сторону, то его движение является колебательным (рис. 3).
2. В определение понятия механического движения входят слова «относительно других тел». Они означают, что данное тело может покоиться относительно одних тел и двигаться относительно других тел. Так, пассажир, сидящий в автобусе, движущемся относительно зданий, тоже движется относительно них, но покоится относительно автобуса. Плот, плывущий по течению реки, неподвижен относительно воды, но движется относительно берега (рис. 4). Таким образом, говоря о механическом движении тела, необходимо указывать тело, относительно которого данное тело движется или покоится. Такое тело называют телом отсчёта. В приведённом примере с движущимся автобусом в качестве тела отсчёта может быть выбран какой-либо дом, или дерево, или столб около автобусной остановки.

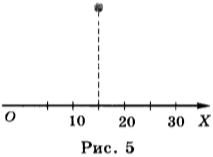
Для определения положения тела в пространстве вводят систему координат, которую связывают с телом отсчёта. При рассмотрении движения тела вдоль прямой линии используют одномерную систему координат, т.е. с телом отсчёта связывают одну координатную ось, например ось ОХ (рис. 5).
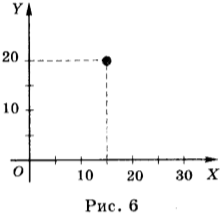
Если тело движется по криволинейной траектории, то система координат будет уже двухмерной, поскольку положение тела характеризуют две координаты X и Y (рис. 6). Таким движением является, например, движение мяча от удара футболиста или стрелы, выпущенной из лука.
Если рассматривается движение тела в пространстве, например движение летящего самолёта, то система координат, связанная с телом отсчёта, будет состоять из трёх взаимно перпендикулярных координатных осей (OX, OY и OZ) (рис. 7).
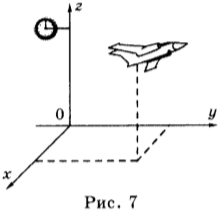
Поскольку при движении тела его положение в пространстве, т.е. его координаты, изменяются с течением времени, то необходим прибор (часы), который позволяет измерять время и определить, какому моменту времени соответствует та или иная координата.
Таким образом, для определения положения тела в пространстве и изменения этого положения с течением времени необходимы тело отсчёта, связанная с ним система координат и способ измерения времени, т.е. часы, которые все вместе представляют собой систему отсчёта (рис. 7).
3. Изучить движение тела — это значит определить, как изменяется его положение, т.е. координата, с течением времени.
Если известно, как изменяется координата со временем, можно определить положение (координату) тела в любой момент времени.
Основная задача механики состоит в определении положения (координаты) тела в любой момент времени.
Чтобы указать, как изменяется положение тела с течением времени, нужно установить связь между величинами, характеризующими это движение, т.е. найти математическое описание движения или, иными словами, записать уравнение движения тела.
Раздел механики, изучающий способы описания движения тел, называют кинематикой.
4. Любое движущееся тело имеет определённые размеры, и его различные части занимают разные положения в пространстве. Возникает вопрос, как в таком случае определить положение тела в пространстве. В делом ряде случаев нет необходимости указывать положение каждой точки тела и для каждой точки записывать уравнение движения.
Так, поскольку при поступательном движении все точки тела движутся одинаково, то нет необходимости описывать движение каждой точки тела.
Движение каждой точки тела не нужно описывать и при решении таких задач, когда размерами тела можно пренебречь. Например, если нас интересует, с какой скоростью пловец проплывает свою дистанцию, то рассматривать движение каждой точки пловца нет необходимости. Если же необходимо определить действующую на мяч выталкивающую силу, то пренебречь размерами пловца уже нельзя. Если мы хотим вычислить время движения космического корабля от Земли до космической станции, то корабль можно считать единым целым и представить в виде некоторой точки. Если же рассчитывается режим стыковки корабля со станцией, то, представив корабль в виде точки, решить эту задачу невозможно.
Таким образом, для решения ряда задач, связанных с движением тел, вводят понятие материальной точки.
Материальной точкой называют тело, размерами которого можно пренебречь в условиях данной задачи.
В приведённых выше примерах материальной точкой можно считать пловца при расчёте скорости его движения, космический корабль при определении времени его движения.
Материальная точка — это модель реальных объектов, реальных тел. Считая тело материальной точкой, мы отвлекаемся от несущественных для решения конкретной задачи признаков, в частности, от размеров тела.
5. При перемещении тело последовательно проходит точки пространства, соединив которые, можно получить линию. Эта линия, вдоль которой движется тело, называется траекторией. Траектория может быть видимой или невидимой. Видимую траекторию описывают трамвай при движении по рельсам, лыжник, скользя по лыжне, мел, которым пишут на доске. Траектория летящего самолёта в большинстве случаев невидима, невидимой является траектория ползущего насекомого.
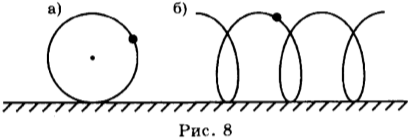
Траектория движения тела относительна: её форма зависит от выбора системы отсчёта. Так, траекторией точек обода колеса велосипеда, движущегося по прямой дороге, относительно оси колеса является окружность, а относительно Земли — винтовая линия (рис. 8 а, б).
6. Одной из характеристик механического движения является путь, пройденный телом. Путём называют физическую величину, равную расстоянию, пройденному телом вдоль траектории.
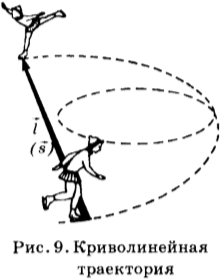
Если известны траектория тела, его начальное положение и пройденный им путь за время ( t ), то можно найти положение тела в момент времени ( t ). (рис. 9)
Путь обозначают буквой ( l ) (иногда ( s )), основная единица пути 1 м: ( [,mathrm{l},] )= 1 м. Кратная единица пути — километр (1 км = 1000 м); дольные единицы — дециметр (1 дм = 0,1 м), сантиметр (1 см = 0,01 м) и миллиметр (1 мм = 0,001 м).
Путь — величина относительная, значение пути зависит от выбора системы отсчёта. Так, путь пассажира, переходящего из конца движущегося автобуса к его передней двери, равен длине автобуса в системе отсчёта, связанной с автобусом. В системе отсчёта, связанной с Землёй, он равен сумме длины автобуса и пути, который проехал автобус относительно Земли.
7. Если траектория движения тела неизвестна, то значение пути не позволит установить его положение в любой момент времени, поскольку направление движения тела не определено. В этом случае используют другую характеристику механического движения — перемещение.
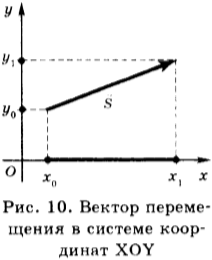
Перемещение — вектор, соединяющий начальное положение тела с его конечным положением (рис. 10)
Перемещение — векторная физическая величина, имеет направление и числовое значение, обозначается ( overrightarrow{s} ). Единица перемещения ( [,mathrm{s},] ) = 1 м.
Зная начальное положение тела, его перемещение (направление и модуль) за некоторый промежуток времени, можно определить положение тела в конце этого промежутка времени.
Следует иметь в виду, что перемещение в общем случае не совпадает с траекторией, а модуль перемещения — с пройденным путём. Это совпадение имеет место лишь при движении тела по прямолинейной траектории в одну сторону. Например, если пловец проплыл 100-метровую дистанцию в бассейне, длина дорожки которого 50 м, то его путь равен 100 м, а модуль перемещения равен нулю.
Перемещение, так же как и путь, величина относительная, зависит от выбора системы отсчёта.
При решении задач пользуются проекциями вектора перемещения. На рисунке 10 изображены система координат и вектор перемещения в этой системе координат.
Координаты начала перемещения — ( x_0, y_0 ); координаты конца перемещения — ( x_1, y_1 ). Проекция вектора перемещения на ось ОХ равна: ( s_x=x_1-x_0 ). Проекция вектора перемещения на ось OY равна: ( s_y=y_1-y_0 ).
Модуль вектора перемещения равен: ( s=sqrt{s^2_x-s^2_y} ).
Содержание
- ПРИМЕРЫ ЗАДАНИЙ
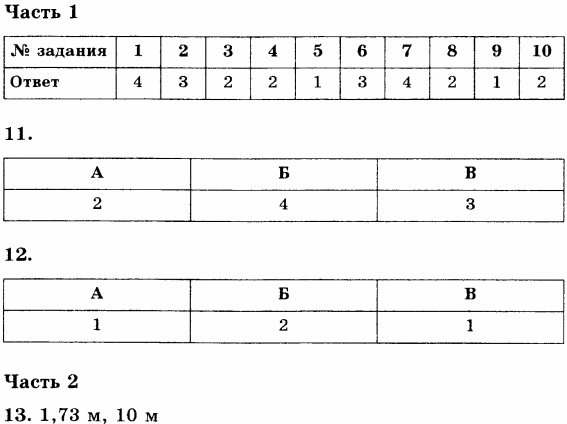
- Часть 1
- Часть 2
- Ответы
ПРИМЕРЫ ЗАДАНИЙ
Часть 1
1. В состав системы отсчёта входят
1) только тело отсчёта
2) только тело отсчёта и система координат
3) только тело отсчёта и часы
4) тело отсчёта, система координат, часы
2. Относительной величиной является: А. Путь; Б. Перемещение. Правильный ответ
1) только А
2) только Б
3) и А, и Б
4) ни А, ни Б
3. Пассажир метро стоит на движущемся вверх эскалаторе. Он неподвижен относительно
1) пассажиров, стоящих на другом эскалаторе, движущемся вниз
2) других пассажиров, стоящих на этом же эскалаторе
3) пассажиров, шагающих вверх по этому же эскалатору
4) светильников на баллюстраде эскалатора
4. Относительно какого тела покоится автомобиль, движущийся по автостраде?
1) относительно другого автомобиля, движущегося с такой же скоростью в противоположную сторону
2) относительно другого автомобиля, движущегося с такой же скоростью в ту же сторону
3) относительно светофора
4) относительно идущего вдоль дороги пешехода
5. Два автомобиля движутся с одинаковой скоростью 20 м/с относительно Земли в одном направлении. Чему равна скорость одного автомобиля в системе отсчёта, связанной с другим автомобилем?
1) 0
2) 20 м/с
3) 40 м/с
4) -20 м/с
6. Два автомобиля движутся с одинаковой скоростью 15 м/с относительно Земли навстречу друг другу. Чему равна скорость одного автомобиля в системе отсчёта, связанной с другим автомобилем?
1) 0
2) 15 м/с
3) 30 м/с
4) -15 м/с
7. Какова относительно Земли траектория точки лопасти винта летящего вертолёта?
1) прямая
2) окружность
3) дуга
4) винтовая линия
8. Мяч падает с высоты 2 м и после удара о пол поднимается на высоту 1,3 м. Чему равны путь ( l ) и модуль перемещения ( s ) мяча за всё время движения?
1) ( l )= 3,3 м, ( s ) = 3,3 м
2) ( l ) = 3,3 м, ( s ) = 0,7 м
3) ( l )= 0,7 м, ( s ) = 0,7 м
4) ( l )= 0,7 м, ( s ) = 3,3 м
9. Решают две задачи. 1. Рассчитывают скорость движения поезда между двумя станциями. 2. Определяют силу трения, действующую на поезд. При решении какой задачи поезд можно считать материальной точкой?
1) только первой
2) только второй
3) и первой, и второй
4) ни первой, ни второй
10. Точка обода колеса при движении велосипеда описывает половину окружности радиуса ( R ). Чему равны при этом путь ( l ) и модуль перемещения ( s ) точки обода?
1)( l=2R ), ( s=2R )
2)( l=pi R ),( s=2R )
3)( l=2R ),( s=pi R )
4) ( l=pi R ), ( s=pi R ).
11. Установите соответствие между элементами знаний в левом столбце и понятиями в правом столбце. В таблице под номером элемента знаний левого столбца запишите соответствующий номер выбранного вами понятия правого столбца.
ЭЛЕМЕНТ ЗНАНИЙ
A) физическая величина
Б) единица величины
B) измерительный прибор
ПОНЯТИЕ
1) траектория
2) путь
3) секундомер
4) километр
5) система отсчёта
12. Установите соответствие между величинами в левом столбце и характером величины в правом столбце. В таблице под номером элемента знаний левого столбца запишите соответствующий номер выбранного вами понятия правого столбца.
ВЕЛИЧИНА
A) путь
Б) перемещение
B) проекция перемещения
ХАРАКТЕР ВЕЛИЧИНЫ
1) скалярная
2) векторная
Часть 2
13. Автомобиль свернул на дорогу, составляющую угол 30° с главной дорогой, и совершил по ней перемещение, модуль которого равен 20 м. Определите проекцию перемещения автомобиля на главную дорогу и на дорогу, перпендикулярную главной дороге.
Ответы
Механическое движение. Траектория. Путь. Перемещение
2.9 (57.2%) 214 votes