Как найти координаты вершин куба в пространстве
Содержание
- 11 класс. Геометрия. Метод координат в пространстве. Прямоугольная система координат.
- Вопросы
- Поделись с друзьями
- Комментарии преподавателя
- 1. Введение
- 2. Координаты вектора
- Координаты куба
- Координаты трехгранной призмы
- Координаты шестигранной призмы
- Координаты четырехугольной пирамиды
11 класс. Геометрия. Метод координат в пространстве. Прямоугольная система координат.
- Оглавление
- Занятия
- Обсуждение
- О курсе
Вопросы
Задай свой вопрос по этому материалу!
Поделись с друзьями
Комментарии преподавателя
1. Введение
Если через точку О в пространстве мы проведем три перпендикулярные прямые, назовем их, выберем направление, обозначим единичные отрезки, то мы получим прямоугольную систему координат в пространстве. Оси координат называются так: Ох – ось абсцисс, Оy – ось ординат и Оz – ось аппликат. Вся система координат обозначается – Oxyz. Таким образом, появляются три координатные плоскости: Оxy, Оxz, Оyz.
Приведем пример построения точки В(4;3;5) в прямоугольной системе координат (см. Рис. 1).

Рис. 1. Построение точки B в пространстве
Первая координата точки B – 4, поэтому откладываем на Ox 4, проводим прямую параллельно оси Oy до пересечения с прямой, проходящей через у=3. Таким образом, мы получаем точку K. Эта точка лежит в плоскости Oxy и имеет координаты K(4;3;0). Теперь нужно провести прямую параллельно оси Oz. И прямую, которая проходит через точку с аппликатой 5 и параллельна диагонали параллелограмма в плоскости Oxy. На их пересечении мы получим искомую точку B.
Рассмотрим расположение точек, у которых одна или две координаты равны 0 (см. Рис. 2).

Например, точка A(3;-1;0). Нужно продолжить ось Oy влево до значения -1, найти точку 3 на оси Ox, и на пересечении линий, проходящих через эти значения, получаем точку А. Эта точка имеет аппликату 0, а значит, она лежит в плоскости Oxy.
Точка C(0;2;0) имеет абсциссу и аппликату 0 – не отмечаем. Ордината равна 2, значит точка C лежит только на оси Oy, которая является пересечением плоскостей Oxy и Oyz.
Чтобы отложить точку D(-4;0;3) продолжаем ось Ox назад за начало координат до точки -4. Теперь восстанавливаем из этой точки перпендикуляр – прямую, параллельную оси Oz до пересечения с прямой, параллельной оси Ox и проходящей через значение 3 на оси Oz. Получаем току D(-4;0;3). Так как ордината точки равна 0, значит точка D лежит в плоскости Oxz.
Следующая точка E(0;5;-3). Ордината точки 5, аппликата -3, проводим прямые проходящие через эти значения на соответствующих осях, и на их пересечении получаем точку E(0;5;-3). Эта точка имеет первую координату 0, значит она лежит в плоскости Oyz.
2. Координаты вектора
Начертим прямоугольную систему координат в пространстве Oxyz. Зададим в пространстве прямоугольную систему координат Oxyz. На каждой из положительных полуосей отложим от начала координат единичный вектор, т. е. вектор, длина которого равна единице. Обозначим единичный вектор оси абсцисс . Эти векторы сонаправлены с направлениями осей, имеют единичную длину и ортогональны – попарно перпендикулярны. Такие вектора называют <strong>координатными векторами</strong> или <strong>базисом.</strong></p>
<p style=)

Рис. 1. Разложение вектора по трем координатным векторам
Возьмем вектор 

Коэффициенты этого разложения x, y и z называются координатами вектора в пространстве.
Рассмотрим правила, которые позволяют по координатам данных векторов найти координаты их суммы и разности, а также координаты произведения данного вектора на данное число.
 1) Сложение:
1) Сложение: 
2) Вычитание: 
3) Умножение на число: Вектор, начало которого совпадает с началом координат, называется радиус—вектором. (Рис. 2). Вектор 

Возьмем точку A(x1;y1;z1) и точку B(x2;y2;z2) (см. рис. 3). Представим вектор 

Рассмотрим примеры, иллюстрирующие свойства векторов и их выражение через координаты. Возьмем векторы 

Теперь умножаем число 3 на каждую координату в скобках, и то же самое делаем с 2:
У нас получилась сумма трех векторов, складываем их по изученному выше свойству:

Ответ: 
Дано: Треугольная пирамида AOBC (см. рис. 4). Плоскости AOB, AOC и OCB – попарно перпендикулярны. OA=3, OB=7, OC=4; M — сер.AC; N — сер.OC; P – сер. CB.
Найти: 

Решение: Введем прямоугольную систему координат Oxyz с началом отсчета в точке O. По условию обозначаем точки A, B и C на осях и середины ребер пирамиды – M, P и N. По рисунку находим координаты вершин пирамиды: A(3;0;0), B(0;7;0), C(0;0;4).
Так как координаты вектора Чтобы найти координаты вектора . Зная координаты нужных точек, найдем координаты оставшихся векторов.</p>
<p style=)
 ;
;
 .
.
Вектора $% куба до точки пересечения диагоналей грани $%BB_1C_1C$%.</li>
</ol>
<p>задан <strong>15 Мар ’15 11:56</strong> </p>
<p> melwentay <br />230 ● 6 ● 42 <br />95% принятых</p>
<p>Здесь не сказано, какая из вершин принята за начало координат а также не указан порядок выбора осей, что создаёт неоднозначность в ответах на некоторые из пунктов. Координаты вершин всегда имеют вид 000, 001, 010, 011, 100, 101, 110, 111 (пишу для простоты без скобок и промежуточных запятых). Для всего остального требуются уточнения, хотя там всё в принципе просто.</p>
<p>@falcao, начало координат-точка А. Оси x,y,z соответствуют ребрам AB, AD, AA1</p>
<p>Тогда все координаты непосредственно видны из рисунка: B(1;0;0), D(0;1;0), C(1;1;0), C1(1;1;1). Середина ребра соответствует полусумме координат: (1;1;1/2). В пункте 3 берётся середина грани, координаты (1;1/2;1/2). Расстояние до нуля — корень из суммы квадратов, то есть $%sqrt<3/2>=sqrt6/2$%.</p>
<div style=)
Метод координат — это, конечно, очень хорошо, но в настоящих задачах C2 никаких координат и векторов нет. Поэтому их придется вводить. Да-да, вот так взять и ввести: указать начало отсчета, единичный отрезок и направление осей x, y и z.
Самое замечательное свойство этого метода заключается в том, что не имеет никакого значения, как именно вводить систему координат. Если все вычисления будут правильными, то и ответ будет правильным.
Тем не менее, приведу некоторые рекомендации, как лучше ввести систему координат для самых часто встречающихся в задаче C2 многогранников. С указанием конкретных точек. Во всех случаях упор делается на минимизацию объема вычислений.
Координаты куба
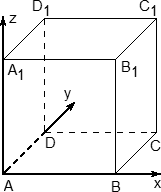
Если в задаче C2 будет куб — считайте, что вам повезло. Это самый простой многогранник, все двугранные углы которого равны 90°.
Система координат также вводится очень просто:
- Начало координат — в точке A;
- Чаще всего ребро куба не указано, поэтому принимаем его за единичный отрезок;
- Ось x направляем по ребру AB, y — по ребру AD, а ось z — по ребру AA1.
Обратите внимание: ось z направляется вверх! После двумерной системы координат это несколько непривычно, но на самом деле очень логично.
Итак, теперь у каждой вершины куба есть координаты. Соберем их в таблицу — отдельно для нижней плоскости куба:
| Точка | A | B | C | D |
| Координаты | (0; 0; 0) | (1; 0; 0) | (1; 1; 0) | (0; 1; 0) |
| Точка | A1 | B1 | C1 | D1 |
| Координаты | (0; 0; 1) | (1; 0; 1) | (1; 1; 1) | (0; 1; 1) |
Несложно заметить, что точки верхней плоскости отличаются соответствующих точек нижней только координатой z. Например, B = (1; 0; 0), B1 = (1; 0; 1). Главное — не запутаться!
Координаты трехгранной призмы
Призма — это уже намного веселее. При правильном подходе достаточно знать координаты только нижнего основания — верхнее будет считаться автоматически.
В задачах C2 встречаются исключительно правильные трехгранные призмы (прямые призмы, в основании которых лежит правильный треугольник). Для них система координат вводится почти так же, как и для куба. Кстати, если кто не в курсе, куб — это тоже призма, только четырехгранная.
Итак, поехали! Вводим систему координат:
- Начало координат — в точке A;
- Сторону призмы принимаем за единичный отрезок, если иное не указано в условии задачи;
- Ось x направляем по ребру AB, z — по ребру AA1, а ось y расположим так, чтобы плоскость OXY совпадала с плоскостью основания ABC.
Здесь требуются некоторые пояснения. Дело в том, что ось y НЕ совпадает с ребром AC, как многие считают. А почему не совпадает? Подумайте сами: треугольник ABC — равносторонний, в нем все углы по 60°. А углы между осями координат должны быть по 90°, поэтому сверху картинка будет выглядеть так:
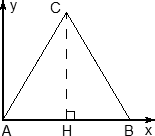
Надеюсь, теперь понятно, почему ось y не пойдет вдоль AC. Проведем в этом треугольнике высоту CH. Треугольник ACH — прямоугольный, причем AC = 1, поэтому AH = 1 · cos A = cos 60°; CH = 1 · sin A = sin 60°. Эти факты нужны для вычисления координат точки C.
Теперь взглянем на всю призму вместе с построенной системой координат:
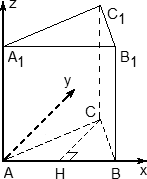
Получаем следующие координаты точек:

Как видим, точки верхнего основания призмы снова отличаются от соответствующих точек нижнего лишь координатой z. Основная проблема — это точки C и C1. У них есть иррациональные координаты, которые надо просто запомнить. Ну, или понять, откуда они возникают.
Координаты шестигранной призмы
Шестигранная призма — это «клонированная» трехгранная. Можно понять, как это происходит, если взглянуть на нижнее основание — обозначим его ABCDEF. Проведем дополнительные построения: отрезки AD, BE и CF. Получилось шесть треугольников, каждый из которых (например, треугольник ABO) является основанием для трехгранной призмы.
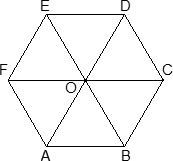
Теперь введем собственно систему координат. Начало координат — точку O — поместим в центр симметрии шестиугольника ABCDEF. Ось x пойдет вдоль FC, а ось y — через середины отрезков AB и DE. Получим такую картинку:
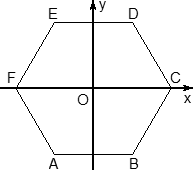
Обратите внимание: начало координат НЕ совпадает с вершиной многогранника! На самом деле, при решении настоящих задач вы обнаружите, что это очень удобно, поскольку позволяет значительно уменьшить объем вычислений.
Осталось добавить ось z. По традиции, проводим ее перпендикулярно плоскости OXY и направляем вертикально вверх. Получим итоговую картинку:
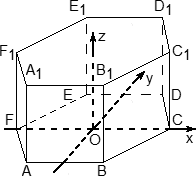
Запишем теперь координаты точек. Предположим, что все ребра нашей правильной шестигранной призмы равны 1. Итак, координаты нижнего основания:

Координаты верхнего основания сдвинуты на единицу по оси z:

Координаты четырехугольной пирамиды
Пирамида — это вообще очень сурово. Мы разберем только самый простой случай — правильную четырехугольную пирамиду, все ребра которой равны единице. Однако в настоящих задачах C2 длины ребер могут отличаться, поэтому ниже приведена и общая схема вычисления координат.
Итак, правильная четырехугольная пирамида. Это такая же, как у Хеопса, только чуть поменьше. Обозначим ее SABCD, где S — вершина. Введем систему координат: начало в точке A, единичный отрезок AB = 1, ось x направим вдоль AB, ось y — вдоль AD, а ось z — вверх, перпендикулярно плоскости OXY. Для дальнейших вычислений нам потребуется высота SH — вот и построим ее. Получим следующую картинку:
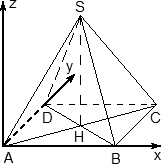
Теперь найдем координаты точек. Для начала рассмотрим плоскость OXY. Здесь все просто: в основании лежит квадрат, его координаты известны. Проблемы возникают с точкой S. Поскольку SH — высота к плоскости OXY, точки S и H отличаются лишь координатой z. Собственно, длина отрезка SH — это и есть координата z для точки S, поскольку H = (0,5; 0,5; 0).
Заметим, что треугольники ABC и ASC равны по трем сторонам (AS = CS = AB = CB = 1, а сторона AC — общая). Следовательно, SH = BH. Но BH — половина диагонали квадрата ABCD, т.е. BH = AB · sin 45°. Получаем координаты всех точек:
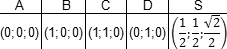
Вот и все с координатами пирамиды. Но не с координатами вообще. Мы рассмотрели лишь самые распространенные многогранники, однако этих примеров достаточно, чтобы самостоятельно вычислить координаты любых других фигур. Поэтому можно приступать, собственно, к методам решения конкретных задач C2.
«>
Оценка статьи:
![]() Загрузка…
Загрузка…
Регистрация
Ваше имя
Пароль
Хочу получать рассылку рекламных и информационных сообщений.
Нажимая на кнопку «Регистрация», вы подтверждаете свое согласие сусловиями предоставления услуг (пользовательское соглашение) и условиями обработки персональных данных
Видео
Координаты вершин куба
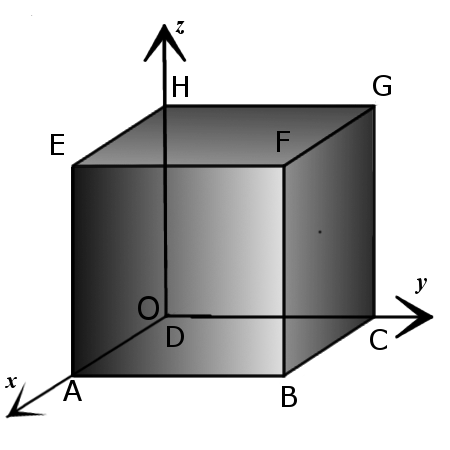
 1. Координаты вершин куба со стороной a и вершиной D в начале декартовой системы координат так, что ребра этой вершины лежат на осях координат:
1. Координаты вершин куба со стороной a и вершиной D в начале декартовой системы координат так, что ребра этой вершины лежат на осях координат:
A(a, 0, 0), B(a, a, 0), C(0, a, 0), D(0, 0, 0), E(a, 0, a), F(a, a, a), G(0, a, a), H(0, 0, a).
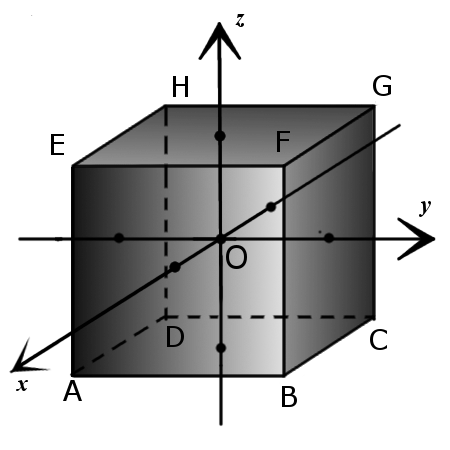
2. Координаты вершин куба с длиной стороны 2a , у которого центр куба находится в начале декартовой системы координат так, что ребра куба параллельны осям координат:
A(a , -a , -a ), B(a , a , -a ), C(-a , a , -a ), D(-a , -a , -a ),
E(a , -a , a ), F(a , a , a ), G(-a , a , a ), H(-a , -a , a ).
Куб — Вікіпедія
Матеріал з Вікіпедії — вільної енциклопедії.


Куб (від лат. cubus, первісно — «кубічна кістка для гри»)[1] або гекса́едр (від дав.-гр. ἑξα- — «шість» + ἕδρα — «грань, поверхня») — правильний многогранник, кожна грань якого є квадратом. Окремий випадок паралелепіпеда і призми.
У різних дисциплінах використовуються значення терміну, що мають відношення до тих або інших властивостей геометричного прототипу. Зокрема, в алгебрі кубом числа називають значення цього числа, піднесене до 3-го степеня. В аналітиці (OLAP-аналіз) застосовуються так звані аналітичні багатовимірні куби, що дозволяють в наочному вигляді зіставити дані з різних таблиць.
Декартові координати[ред.
Якщо центр куба сумістити з початком координат, а ре
No related posts.
Теги
Куб. Формулы, признаки и свойства куба
Определение.
Куб (гексаедр) — это трехмерная фигура, которая состоит из шести динаковых квадратов так, что каждый квадрат полностью соприкасается своими четырьмя сторонами к сторонам остальных четырех квадратов под прямым углом. Куб является правильным многогранником, у которого грани образованы из квадратов. Также кубом можно назвать прямоугольный параллелепипед, у которого все ребра равны.
Определение. Грань куба — это часть плоскости, ограниченная сторонами квадрата.
— куб имеет шесть граней;
— каждая грань куба пересекается с четырьмя другими гранями под прямым углом и параллельная шестой грани;
— грани имеют одинаковую площадь, которую можно найти, используя формулы для вычисления площади квадрата.
Определение. Ребро куба — это отрезок, образованный пересечением двух граней куба.
— куб имеет двенадцать ребер;
— каждый конец ребра соединен с двумя соседними ребрами под прямым углом;
— ребра куба имеют одинаковую длину.
Определение. Вершина куба — это самая отдаленная от центра куба точка, которая лежит на пересечения трех граней куба.
— куб имеет восемь вершин;
— каждая вершина образована только тремя гранями и тремя ребрами.
Определение. Центр грани куба (O1) — это равноудалена точка от всех ребер грани куба.
Определение. Центр куба (O) — это равноудалена точка от всех граней куба.
Определение. Ось куба (i) — это прямая, проходящая через центр куба и центры двух параллельных граней куба.
— куб имеет три оси;
— оси куба взаимно перпендикулярны.
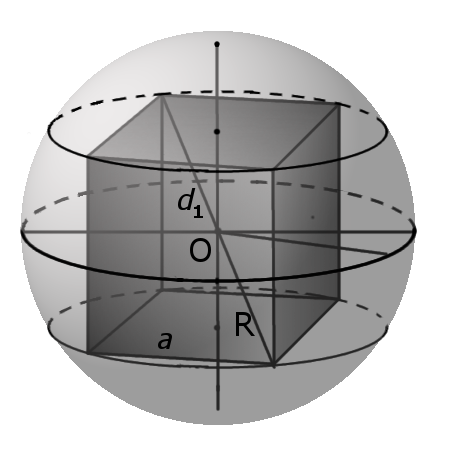
Определение. Диагональ куба (d1) — отрезок, который соединяет противоположные вершины куба и проходит через центр куба.
— куб имеет четыре диагонали;
— диагонали куба пересекаются и делятся пополам в центре куба;
— диагонали куба имеют одинаковую длину.
Формула. Диагональ куба d1 через длину ребра a:
d1 = a√3
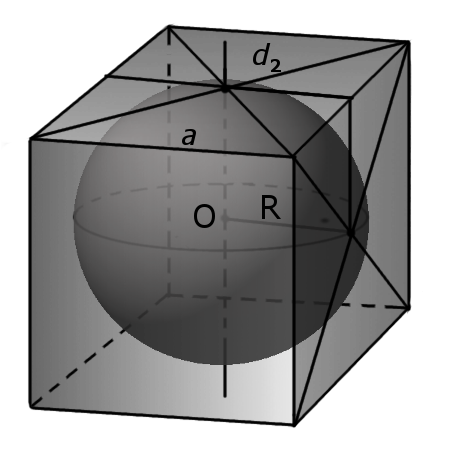
Определение. Диагональ грани куба (d2) -отрезок, который соединяет противоположные углы грани куба и проходит через центр грани куба.
Формула. Диагональ грани d2 через длину ребра a:
d2 = a√2
Определение. Объём куба — это совокупность всех точек в пространстве, ограниченные гранями куба.
Формула. Объём куба через длину ребра a:
V = a3
Формула. Объём куба через длину диагонали куба d1:
Определение. Площадь поверхности куба — это совокупность плоскостей всех граней.
Формула. Площадь поверхности куба через длину ребра a:
S = 6a2
Определение. Периметр куба — это совокупность длин всех ребер куба.
Формула. Периметр куба P через длину ребра a:
P = 12a
Определение. Сферой вписанной в куб называется сфера, центр которой совпадает с центром куба и которая касается центров граней куба.
— все шесть граней куба являются касательными плоскостями к вписанной сферы;
— радиус вписанной сферы равен половине длины ребра a.
Формула. Радиус вписанной сферы r через длину ребра a:
Формула. Объема вписанной сферы V через длину ребра a:
Определение. Сферой описанной вокруг куба называется сфера, центр которой совпадает с центром куба и которая соприкасается с восьмью вершинами куба.
— радиус описанной сферы равен половине длины диагонали (d1) куба.
Формула. Радиус описанной сферы R через длину ребра a:
Формула. Объема сферы описанной вокруг куба V через длину ребра a:
Свойства куба
1. В куб можно вписать тетраэдр так, чтобы все четыре вершины тетраэдра лежали на четырех вершинах куба, а все шесть ребер тетраэдра будут лежать на шести гранях куба и ребра будут равны диагонали грани куба.
2. В куб можно вписать правильный шестиугольник так, что все шесть вершин лежат в центрах граней куба.
Координаты вершин куба
1. Координаты вершин куба со стороной a и вершиной D в начале декартовой системы координат так, что ребра этой вершины лежат на осях координат:
A(a, 0, 0),
B(a, a, 0),
C(0, a, 0),
D(0, 0, 0),
E(a, 0, a),
F(a, a, a),
G(0, a, a),
H(0, 0, a).
2. Координаты вершин куба с длиной стороны 2a, у которого центр куба находится в начале декартовой системы координат так, что ребра куба параллельны осям координат:
A(a, —a, —a),
B(a, a, —a),
C(-a, a, —a),
D(-a, —a, —a),
E(a, —a, a),
F(a, a, a),
G(-a, a, a),
H(-a, —a, a).
Определение. Единичный куб — это куб, у которого длина ребер равна единице.
Пересечение куба плоскостью
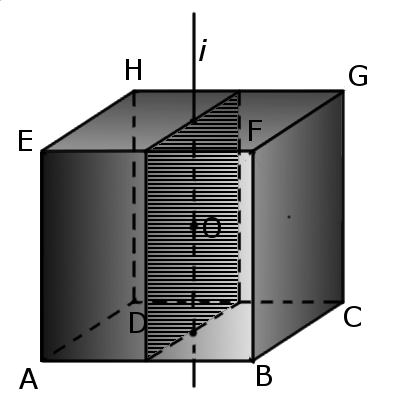
1. Если пересечь куб плоскостью, проходящей через центр куба и центры двух противоположных граней, то в сечении будет квадрат, длина стороны которого будет равна длине ребра куба. Эта плоскость делит куб два равных прямоугольных параллелепипеда.
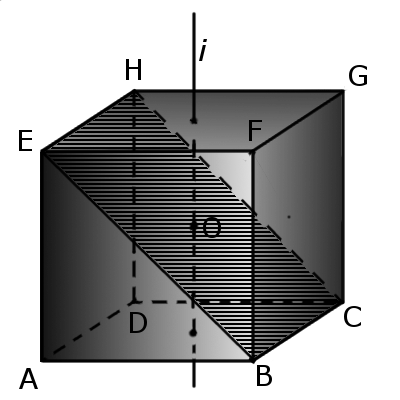
2. Если пересечь куб с ребром a плоскостью, проходящей через центр куба и два параллельных ребра, то в сечении будет прямоугольник со сторонами a и a√2, площадью сечения a2√2. Эта плоскость делит куб две равные призмы.
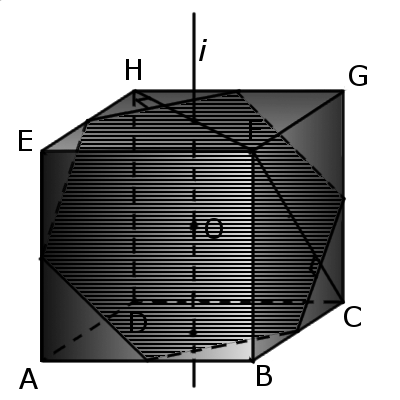
3. Если пересечь куб плоскостью, проходящей через центр и середины шести граней, то в сечении будет правильный шестиугольник со стороной a√2/2, площадью сечения a2(3√3)/4. У куба одна из диагоналей (FC) каждой грани, что пересекаются, перпендикулярна стороне шестиугольника.
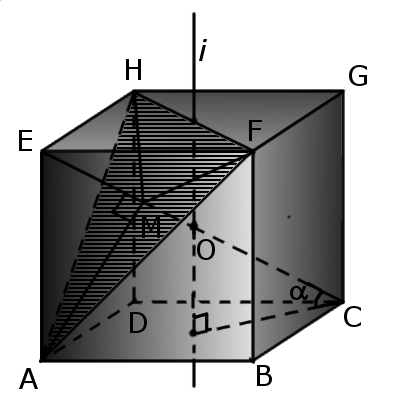
4. Если пересечь куб плоскостью, проходящей через три вершины куба, то в сечении будет правильный треугольник со стороной a√2, площадью сечения a2√3/2 и объемом большей части — 5a3/6 и меньшей — a3/6. Одна из диагоналей куба (EC) перпендикулярна к плоскости сечения и проходит через центр треугольника (M) и делится плоскостью в отношении MC:EМ = 2:1.
Обнаружение столкновений и теорема о разделяющей оси
В наше время компьютеры представляют собой мощные вычислительные машины,
способные выполнять миллионы операций в секунду. И естественно не обойтись без симуляции реального или игрового мира. Одна из задач компьютерного моделирования и симуляции состоит в определении столкновения двух объектов, одно из решений которой реализуется теоремой о разделяющей оси.
Примечание. В статье будет приведен пример с 2 параллелепипедами(далее — кубы), но идея для других выпуклых объектов будет сохранена.
Примечание. Вся реализация будет выполнена в Unity.
Акт 0. Общая теория
Для начала нужно познакомиться с «теоремой о разделяющей гиперплоскости».Именно она будет лежать в основе алгоритма.
Теорема. Две выпуклые геометрии не пересекаются, тогда и только тогда, когда между ними существует гиперплоскость, которая их разделяет. Ось ортогональная разделяющей
гиперплоскости называется разделяющей осью, а проекции фигур на нее не пересекаются.
Разделяющая ось (двумерный случай)
Разделяющая ось (трехмерный случай)
Можно заметить, что проекции на разделяющую ось не пересекаются.
Свойство. Потенциальная разделяющая ось будет находиться в следующих множествах:
- Нормы плоскостей каждого куба(красные)
- Векторное произведение ребер кубов ,
где X — ребра первого куба (зеленые), а Y — второго (синие).
Каждый куб мы можем описать следующими входными данными:
- Координаты центра куба
- Размеры куба (высота, ширина, глубина)
- Кватернион куба
Создадим для этого дополнительный класс, экземпляры которого будут предоставлять информацию о кубе.
Акт 1. Кватернионы
Как часто бывает, объект может вращаться в пространстве. Для того, чтобы найти координаты вершин, с учетом вращения куба, необходимо понять, что такое кватернион.
Кватернион — это гиперкомплексное число, которое определяет вращение объекта в пространстве.
Мнимая часть(x,y,z) представляет вектор, который определяет направление вращения
Вещественная часть(w) определяет угол, на который будет совершено вращение.
Его основное отличие от всем привычных углов Эйлера в том, что нам достаточно иметь один вектор, который будет определять направление вращения, чем три линейно независимых вектора, которые вращают объект в 3 подпространствах.
Рекомендую две статьи, в которых подробно рассказывается о кватернионах:
Теперь, когда у нас есть минимальные представления о кватернионах, давайте поймем, как вращать вектор, и опишем функцию вращение вектора кватернионом.
Формула вращения вектора
— искомый вектор
— исходный вектор
— кватернион
— обратный кватернион
Для начала, дадим понятие обратного кватерниона в ортонормированном базисе — это кватернион с противоположной по знаку мнимой частью.
Посчитаем
Теперь выпишем отдельные компоненты и из этого произведения соберем новый кватернион
Посчитаем оставшуюся часть, т.е. и получим искомый вектор.
Примечание. Чтобы не загромождать вычисления, приведем только мнимую(векторную) часть этого произведения. Ведь именно она характеризует искомый вектор.
Соберем компоненты вектора
Таким образом необходимый вектор получен
Акт 2. Нахождение вершин куба
Зная как вращать вектор кватернионом, не составит труда найти все вершины куба.
Перейдем к функцию нахождении вершин куба. Определим базовые переменные.
Далее необходимо найти такую точку(опорную точку), от которой будет легче всего найти другие вершины.
Из центра покоординатно вычитаем половину размерности куба.Потом к опорной точке прибавляем по одной размерности куба.
Можем видеть, как сформированы точки
После нахождения координат вершин, необходимо повернуть каждый вектор на соответствующий кватернион.
Перейдем к проекциям.
Акт 3. Поиск разделяющих осей
Следующим шагом необходимо найти множество осей, претендующих на разделяющую.
Вспомним, что ее можно найти в следующих множествах:
- Нормали плоскостей каждого куба(красные)
- Векторное произведение ребер кубов , где X — ребра первого куба (зеленые), а Y — второго (синие).
Для того, чтобы получить необходимые оси, достаточно иметь четыре вершины куба, которые формируют ортогональную систему векторов. Эти вершины находятся в первых четырех ячейках массива точек, которые мы сформировали во втором акте.
Необходимо найти нормали плоскостей, порожденные векторами:
- и
- и
- и
Для этого надо перебрать пары ребер куба так, чтобы каждая новая выборка образовывала плоскость, ортогональную всем предыдущим полученным плоскостям.
Еще мы должны найти все векторные произведения ребер кубов. Это можно организовать простым перебором:
Акт 4. Проекции на оси
Мы подошли к самому главному моменту. Здесь мы должны найти проекции кубов на все потенциальные разделяющие оси. У теоремы есть одно важное следствие: если объекты пересекаются, то ось на которую величины пересечения проекции кубов минимальна — является направлением(нормалью) коллизии, а длинна отрезка пересечения — глубиной проникновения.
Но для начала напомним формулу скалярной проекции вектора v на единичный вектор a:
Теперь опишем функцию, которая будет определять пересечение проекций на оси-кандидаты.
На вход подаем вершины двух кубов, и список потенциальных разделяющих осей:
Проекция на ось задается двумя точками, которые имеют максимальные и минимальные значения на самой оси:
Далее создаем функцию, которая возвращает проекционные точки каждого куба. Она принимает два возвращаемых параметра, массив вершин и потенциальную разделяющую ось.
Итого, применив данную функцию( ProjAxis ), получим проекционные точки каждого куба.
Далее, на основе проекционных вершин определяем пересечение проекций:
Для этого давайте поместим наши точки в массив и отсортируем его, такой способ поможет нам определить не только пересечение, но и глубину пересечения.
Заметим следующее свойство:
1) Если отрезки не пересекаются, то сумма отрезков будет меньше, чем отрезок сформированными крайними точками:
2) Если отрезки пересекаются, то сумма отрезков будет больше, чем отрезок сформированными крайними точками:
Вот таким простым условием мы проверили пересечение и непересечение отрезков.
Если пересечения нет, то глубина пересечения будет равна нулю:
Таким образом, нам достаточно иметь хоть один вектор, на котором проекции кубов не пересекаются, тогда и сами кубы не пересекаются. Поэтому, когда мы найдем разделяющую ось, мы сможем не проверять оставшееся вектора, и завершить работу алгоритма.
В случае пересечения кубов, все немного интереснее: проекции кубов на все вектора будет пересекаться, и мы должны определить вектор с минимальным пересечением.
Создадим этот вектор перед циклом, и будем хранить в нем вектор с минимальной длинной. Тем самым в конце работы цикла получим искомый вектор.
И каждый раз, когда мы находим ось, на которой проекции пересекаются, проверяем является ли она минимальной по длине среди всех. такую ось умножаем на длину пересечения, и результатом будет искомая нормаль(направление) пересечения кубов.
Так же я добавил определение ориентации нормали по отношению первого куба.
Заключение
Проект с реализацией и примером загружен на GitHub, и ознакомиться можно с ним здесь.
Моей целью было поделиться своим опытом в решение задач связанных с определением пересечений двух выпуклых объектов. А так же доступно и понятно рассказать о данной теореме.
Векторы в пространстве и метод координат
Существует два способа решения задач по стереометрии
Первый — классический — требует отличного знания аксиом и теорем стереометрии, логики, умения построить чертеж и свести объемную задачу к планиметрической. Способ хорош тем, что развивает мозги и пространственное воображение.
Другой метод — применение векторов и координат. Это простые формулы, алгоритмы и правила. Он очень удобен, особенно когда времени до экзамена мало, а решить задачу хочется.
Если вы освоили векторы на плоскости и действия с ними — то и с векторами в пространстве разберетесь. Многие понятия окажутся знакомыми.
Система координат в пространстве
Выберем начало координат. Проведем три взаимно перпендикулярные оси X, Y и Z. Зададим удобный масштаб.

Получилась система координат в трехмерном пространстве. Теперь каждая его точка характеризуется тремя числами — координатами по X, Y и Z. Например, запись M(−1; 3; 2) означает, что координата точки M по X (абсцисса) равна −1, координата по Y (ордината) равна 3, а координата по Z (аппликата) равна 2.
Векторы в пространстве определяются так же, как и на плоскости. Это направленные отрезки, имеющие начало и конец. Только в пространстве вектор задается тремя координатами x, y и z:

Как найти координаты вектора? Как и на плоскости — из координаты конца вычитаем координату начала.

Длина вектора в пространстве – это расстояние между точками A и B. Находится как корень квадратный из суммы квадратов координат вектора.
Пусть точка M – середина отрезка AB. Ее координаты находятся по формуле:
Для сложения векторов применяем уже знакомые правило треугольника и правило параллелограмма

Сумма векторов, их разность, произведение вектора на число и скалярное произведение векторов определяются так же, как и на плоскости. Только координат не две, а три. Возьмем векторы и .
Произведение вектора на число:
Скалярное произведение векторов:
Косинус угла между векторами:
Последняя формула удобна для нахождения угла между прямыми в пространстве. Особенно если эти прямые – скрещиваются. Напомним, что так называются прямые, которые не параллельны и не пересекаются. Они лежат в параллельных плоскостях.
1. В кубе ABCDA1B1C1D1 точки E и K — середины ребер соответственно A1B1 и B1C1. Найдите косинус угла между прямыми AE и BK.
Если вам достался куб — значит, повезло. Он отлично вписывается в прямоугольную систему координат. Строим чертеж:

Длина ребра куба не дана. Какой бы она ни была, угол между AE и BK от нее не зависит. Поэтому возьмем единичный куб, все ребра которого равны 1.
Прямые AE и BK — скрещиваются. Найдем угол между векторами и . Для этого нужны их координаты.
Запишем координаты векторов:
и найдем косинус угла между векторами и :

2. В правильной четырехугольной пирамиде SABCD, все ребра которой равны 1, точки E, K — середины ребер SB и SC соответственно. Найдите косинус угла между прямыми AE и BK.
Лучше всего выбрать начало координат в центре основания пирамиды, а оси X и Y сделать параллельными сторонам основания.

Координаты точек A, B и C найти легко:
Из прямоугольного треугольника AOS найдем
Координаты вершины пирамиды:
Точка E — середина SB, а K — середина SC. Воспользуемся формулой для координат середины отрезка и найдем координаты точек E и K.
Найдем координаты векторов и
и угол между ними:
Покажем теперь, как вписать систему координат в треугольную призму:
3. В правильной треугольной призме ABCA1B1C1, все ребра которой равны 1, точка D — середина ребра A1B1. Найдите косинус угла между прямыми AD и BC1
Пусть точка A — начало координат. Возьмем ось X параллельно стороне BC, а ось Y перпендикулярно ей. Другими словами, на оси Y будет лежать отрезок AH, являющийся высотой треугольника ABC. Нарисуем отдельно нижнее основание призмы.

Запишем координаты точек:
Точка D — середина A1B1. Значит, пользуемся формулами для координат середины
отрезка.
Найдем координаты векторов и , а затем угол между ними:
Смотрите, как легко с помощью векторов и координат найти угол между прямыми. А если требуется найти угол между плоскостями или между прямой и плоскостью? Для решения подобных задач нам понадобится уравнение плоскости в пространстве.
Плоскость в пространстве задается уравнением:
Здесь числа A, B и C — координаты вектора, перпендикулярного этой плоскости. Его называют нормалью к плоскости.

Вместо x, y и z можно подставить в уравнение координаты любой точки, принадлежащей данной плоскости. Получится верное равенство.
Плоскость в пространстве можно провести через любые три точки, не лежащие на одной прямой. Поэтому для того, чтобы написать уравнение плоскости, берем координаты трех принадлежащих ей точек. Подставляем их по очереди в уравнение плоскости. Решаем полученную систему.
Покажем, как это делается.
Напишем уравнение плоскости, проходящей через точки M (1; 0; 1), N (2; −2; 0) и K (4; 1; 2).
Уравнение плоскости выглядит так:
Подставим в него по очереди координаты точек M, N и K.
То есть A + C + D = 0.
Аналогично для точки K:
Получили систему из трех уравнений:
В ней четыре неизвестных: A, B, C и D. Поэтому одну из них мы выберем сами, а другие выразим через нее. Правило простое — вместо одной из переменных можно взять любое число, не равное нулю.
Пусть, например, D = −2. Тогда:
Выразим C и B через A и подставим в третье уравнение:
Решив систему, получим:
Уравнение плоскости MNK имеет вид:
Умножим обе части уравнения на −3. Тогда коэффициенты станут целыми:
Вектор — это нормаль к плоскости MNK.
Уравнение плоскости, проходящей через заданную точку имеет вид:
Угол между плоскостями равен углу между нормалями к этим плоскостям:
Не правда ли, знакомая формула? Скалярное произведение нормалей поделили на произведение их длин.
Заметим, что при пересечении двух плоскостей вообще-то образуется четыре угла.

Мы берем меньший из них. Поэтому в формуле стоит модуль скалярного произведения — чтобы косинус угла был неотрицателен.
4. В кубе ABCDA1B1C1D1 точки E и F — середины ребер соответственно A1B1 и A1D1. Найдите тангенс угла между плоскостями AEF и BDD1.
Строим чертеж. Видно, что плоскости AEF и BDD1 пересекаются где-то вне куба. В классическом решении пришлось бы строить линию их пересечения. Но векторно-координатный метод значительно всё упрощает. Не будем ломать голову над тем, по какой прямой пересекаются плоскости. Просто отметим координаты нужных нам точек и найдем угол между нормалями к плоскостям AEF и BDD1.

Сначала — нормаль к плоскости BDD1. Конечно, мы можем подставить координаты точек B, D и D1 в уравнение плоскости и найти коэффициенты, которые и будут координатами вектора нормали. А можем сделать хитрее — увидеть нужную нормаль прямо на чертеже. Ведь плоскость BDD1 — это диагональное сечение куба. Вектор перпендикулярен этой плоскости.
Итак, первый вектор нормали у нас уже есть:
Напишем уравнение плоскости AEF.
Берем уравнение плоскости и по очереди подставляем в него, вместо x, y и z, соответствующие координаты точек A, E и F.
Пусть С = -1. Тогда A = B = 2.
Уравнение плоскости AEF:
Нормаль к плоскости AEF:
Найдем угол между плоскостями:
5. Основание прямой четырехугольной призмы BCDA1B1C1D1 — прямоугольник ABCD, в котором AB = 5, AD = √33. Найдите тангенс угла между плоскостью грани AA1D1D и плоскостью, проходящей через середину ребра CD перпендикулярно прямой B1D, если расстояние между прямыми A1C1 и BD равно √3.
Эта задача наглядно показывает, насколько векторный метод проще классического. Попробуйте, для разнообразия, построить необходимые сечения и провести все доказательства — как это делается в «классике» 
Строим чертеж. Прямую четырехугольную призму можно по-другому назвать «параллелепипед».

Замечаем, что длина и ширина параллелепипеда у нас есть, а вот высота — вроде не дана. Как же ее найти?
«Расстояние между прямыми A1C1 и BD равно √3». Прямые A1C1 и BD скрещиваются. Одна из них — диагональ верхнего основания, другая — диагональ нижнего. Вспомним, что расстояние между скрещивающимися прямыми равно длине их общего перпендикуляра. Общий перпендикуляр к A1C1 и BD — это, очевидно, OO1, где O — точка пересечения диагоналей нижнего основания, O1 — точка пересечения диагоналей верхнего. А отрезок OO1 и равен высоте параллелепипеда.
Плоскость AA1 D1 D — это задняя грань призмы на нашем чертеже. Нормаль к ней — это любой вектор, перпендикулярный задней грани, например, вектор или, еще проще, вектор .
Осталась еще «плоскость, проходящая через середину ребра CD перпендикулярно прямой B1D». Но позвольте, если плоскость перпендикулярна прямой B1D — значит, B1D и есть нормаль к этой плоскости! Координаты точек B1 и D известны:
Координаты вектора — тоже:
Находим угол между плоскостями, равный углу между нормалями к ним:
Зная косинус угла, находим его тангенс по формуле
Получим:
Ответ:
Угол между прямой m и плоскостью α тоже вычисляется с помощью скалярного произведения векторов.
Пусть — вектор, лежащий на прямой m (или параллельный ей), — нормаль к плоскости α.

Находим синус угла между прямой m и плоскостью α по формуле:
6. В кубе ABCDA1B1C1D1 точка E — середина ребра A1B1. Найдите синус угла между прямой AE и плоскостью BDD1.
Как всегда, рисуем чертеж и выбираем систему координат

Находим координаты вектора .
Нужно ли нам уравнение плоскости BDD1? В общем-то, без него можно обойтись. Ведь эта плоскость является диагональным сечением куба, а значит, нормалью к ней будет любой вектор, ей перпендикулярный. Например, вектор .
Найдем угол между прямой и плоскостью:
Ответ:
Расстояние от точки M с координатами x0, y0 и z0 до плоскости α, заданной уравнением Ax + By + Cz + D = 0, можно найти по формуле:
7. В основании прямоугольного параллелепипеда BCDA1B1C1D1 лежит прямоугольник ABCD со сторонами AB = , AD = . Высота параллелепипеда AA1 = . Найдите расстояние от точки A до плоскости A1DB.
Построим чертеж и выпишем координаты точек:

Запишем уравнение плоскости A1DB. Вы помните, как это делается — по очереди подставляем координаты точек A1, D и B в уравнение Ax + Be + Cz + D
Решим эту систему. Выберем
Тогда
Уравнение плоскости A1DB имеет вид:
Дальше все просто. Находим расстояние от точки A до плоскости A1DB:
В некоторых задачах по стереометрии требуется найти расстояние от прямой до параллельной ей плоскости. В этом случае можно выбрать любую точку, принадлежащую данной прямой.
Геометрия
Лучшие условия по продуктам Тинькофф по этой ссылке
Дарим 500 ₽ на баланс сим-карты и 1000 ₽ при сохранении номера
. 500 руб. на счет при заказе сим-карты по этой ссылке
Лучшие условия по продуктам
ТИНЬКОФФ по данной ссылке
План урока:
Понятие вектора в пространстве
Напомним, что в курсе планиметрии мы уже подробно изучали вектора и действия с ними. При этом предполагалось, что все вектора располагаются в одной плоскости. Однако можно расширить понятие вектора так, чтобы они использовались и в стереометрии. В таком случае вектора уже могут располагаться в различных плоскостях.
Начнем с определения вектора:
Конец вектора обозначают с помощью стрелки. Посмотрим на рисунок:
Здесь показаны сразу три вектора:
У вектора АВ начало находится в точке А, а конец – в точке В. Аналогично у вектора С D точка С – это начало, а D – это конец. В обоих случаях начало и конец – это различные точки, поэтому АВ и CD именуют ненулевыми векторами. Если же начало и конец находятся в одной точке, например в Т, то получается нулевой вектор ТТ. Всякую точку в пространстве можно рассматривать как нулевой вектор:
Длина вектора АВ – это длина соответствующего ему отрезка АВ. Для обозначения длины используют квадратные скобки:
Естественно, что нулевой вектор имеет нулевую длину.
Далее напомним понятие коллинеарных векторов:
Коллинеарные вектора могут быть либо сонаправленными, либо противоположно направленными. Сонаправленные вектора находятся на сонаправленных лучах. Рассмотрим пример с кубом:
Здесь показаны вектора AD и ВС. Они сонаправленные, этот факт записывается так:
Вектора AD и FE располагаются на скрещивающихся прямых, поэтому они не коллинеарны. Их нельзя считать ни сонаправленными, ни противоположно направленными.
Сонаправленные вектора, имеющие одинаковую длину, именуются равными.
Рассмотрим несколько простейших задач.
Задание. В прямоугольном параллелепипеде АВС DA 1 B 1 C 1 D 1 известны три его измерения:
Решение. Для нахождения длин этих векторов достаточно вычислить длину отрезков СВ, DB и DB 1. Проще всего вычислить СВ, ведь отрезки СВ и AD одинаковы как стороны прямоугольника АВ CD :
Задание. На рисунке показан правильный тетраэдр АВС D . Точки M , N , P и Q являются серединами тех сторон, на которых они располагаются. Какие вектора из отмеченных на рисунке равны между собой?
Решение. Легко заметить, что вектора DP и PC находятся на одной прямой DC и сонаправлены, при этом их длина одинакова, ведь Р – середина DC . Тогда эти вектора по определению равны:
Вектора АМ и МВ также коллинеарны и имеют одинаковую длину, но они противоположно направлены, а потому равными не являются.
Теперь заметим, что отрезки MN , MQ , PQ и NP – это средние линии в ∆ ABD , ∆ АВС, ∆ BCD и ∆ ACD соответственно. По свойству средней линии получаем, что MN || BD , PQ || BD , MQ ||АС и NP ||АС. Отсюда по свойству транзитивности параллельности получаем, что MN || PQ и MQ || NP . Это значит, что четырехугольник MQPN – это параллелограмм, а у него противоположные стороны одинаковы:
Операции над векторами
Правила сложения векторов в стереометрии не отличаются от правил в планиметрии. Пусть надо сложить два вектора, а и b . Для этого отложим вектор а от какой-нибудь точки А, тогда его конец окажется в некоторой точке В. Далее от В отложим вектор b , его конец попадет в какую-то точку С. Тогда вектор АС как раз и будет суммой a и b :
Такой метод сложения векторов именуется правилом треугольника. Если нужно сложить больше двух векторов, то используют правило многоугольника. В этом случае необходимо каждый следующий вектор откладывать от конца предыдущего. При этом в стереометрии вектора могут располагаться в различных плоскостях, то есть они на самом деле многоугольник не образуют:
Напомним, что в планиметрии существовали так называемые противоположные вектора. Есть они и в стереометрии:
Главное свойство противоположных векторов заключается в том, что в сумме они дают нулевой вектор:
Заметим, что для получения противоположного вектора достаточно поменять его начало и конец, то есть в записи вектора обозначающие его буквы надо просто записать в обратном порядке:
C помощью противоположного вектора легко определить операцию вычитания векторов. Чтобы из вектора а вычесть вектор b , надо всего лишь прибавить к a вектор, противоположный b :
Далее рассмотрим умножение вектора на число. Пусть вектор а умножается на число k . В результате получается новый вектор b , причем
1) b и a будут коллинеарными векторами;
2) b будет в k раз длиннее, чем вектор a .
Если k – положительное число, то вектора a и b будут сонаправленными. Если же k a и b будут направлены противоположно.
Уточним, что если | k | b будет не длиннее, а короче вектора a . Наконец, если k = 0, то и b будет иметь нулевую длину, то есть b окажется нулевым вектором.
Задание. Дан параллелепипед АВС D А1В1С1 D 1. Постройте вектор, который будет являться суммой векторов:
Решение. В каждом случае необходимо заменить один из векторов в сумме на другой равный ему вектор так, чтобы можно было применить правило треугольника.
В задании а) вектор А1 D 1 заменить равным ему вектором ВС. В итоге получится вектор АС.
В задании б) заменяем А D 1 на вектор ВС1. Также можно было бы заменить АВ на D 1 C 1. В обоих случаях сумма окажется равной АС1.
В задании в) удобно DA заменить на C 1В1, тогда искомой суммой будет вектор С1В.
В задании г) производим замену DD 1 на равный ему вектор BB 1. Тогда сумма DB и BB 1– это вектор DB 1.
В задании д) необходимо заменить ВС на В1С1. В итоге получаем вектор DC :
Задание. В пространстве отмечены точки А, В, С и D . Выразите вектор АВ через вектора:
Решение. В случае а) сначала запишем очевидное равенство векторов, вытекающее из правило многоугольника:
Обратите внимание, что здесь у каждого следующего слагаемого начальная точка совпадает с конечной точкой предыдущего слагаемого, поэтому равенство и справедливо:
Однако по условию а) нам надо использовать другие вектора для выражения АВ. Мы можем просто заменить вектора CD и DB на противоположные:
Теперь можно составить и выражение для АВ:
Аналогично решаем и задания б) и в):
Задание. Р – вершина правильной шестиугольной пирамиды. Докажите, что сумма векторов, совпадающих с ребрами этой пирамиды и начинающихся в точке Р, в точности равна сумме векторов, которые совпадают с апофемами пирамиды и при этом также начинаются в точке Р.
Решение. Обозначим вершины буквами А1, А2, … А6, а середины сторон шестиугольника, лежащего в основании, буквами Н1, Н2, … Н6, как это показано на рисунке:
Нам надо показать, что сумма красных векторов равна сумме черных векторов:
Теперь отдельно построим правильный шестиугольник, лежащий, в основании пирамиды:
Ясно, что вектора, образованные сторонами этого шестиугольника, в сумме дают нулевой вектор (по правилу многоугольника):
Так как точки Н1, Н2, … Н6 – середины сторона, то вектора Н6А6, Н5А5,…Н1А1 будут вдвое короче векторов А1А6, А6А5, … А2А1. При этом они находятся на одних прямых, поэтому справедливы равенства:
Таким образом нам удалось из верного равенства (3) доказать (2), из которого в свою очередь следует справедливость и (1), ч. т. д.
Задание. Упростите выражения:
Решение. Здесь надо просто применить законы сложения и умножения векторов, как это делалось и в курсе планиметрии. Сначала раскрываем скобки, а потом приводим подобные слагаемые:
Компланарные векторы
Если мы отложим несколько векторов от одной точки, то они либо будут находиться в одной плос-ти, либо располагаться в различных плос-тях. В первом случае их именуют компланарными векторами, а во втором – некомпланарными.
Любые два вектора будут компланарны, ведь при их откладывании от одной точки мы получаем две пересекающихся прямых, а через них всегда можно провести плос-ть. Однако если векторов более двух, то они могут быть как компланарны, так и некомпланарны.
Рассмотрим для примера параллелепипед:
Здесь вектора АС, АВ и АD компланарны, так как все они принадлежат одной грани (то есть плос-ти) АВСD. А вектора АВ, АD и АА1 некомпланарны, ведь через них нельзя провести одну плос-ть.
Очевидно, что если из трех векторов любые два коллинеарны, то вся тройка векторов компланарна, ведь при откладывании векторов от одной точки коллинеарные вектора окажутся на одной прямой.
Существует признак компланарности векторов:
Напомним, что подразумевается под разложением вектора. Пусть есть вектора а, b и c. Если существуют такие числах и y, при которых выполняется равенство
то говорят, что вектор с разложен по векторам а и b, причем числа xи y называются коэффициентами разложения.
Докажем сформулированный признак. Пусть есть три вектора а, b и c, а также числа xи y, такие, что
Эти вектора находятся в одной плос-ти ОАВ. Теперь от той же точки О отложим вектора ха и уb, концы которых окажутся в точках А1 и В1:
Естественно, что вектора ОА1 и ОВ1 также окажутся в плос-ти ОАВ. Тогда и их сумма будет принадлежать этой плос-ти, а эта сумма как раз и есть вектор с:
В итоге получили, что а, b и с располагаются в одной плос-ти, то есть они компланарны.
Справедливо и обратное утверждение. Если вектора а, b и с компланарны, но а и b неколлинеарны, то вектор с можно разложить на вектора a и b. Это утверждение прямо следует из изученной в 9 классе теоремы о разложении векторов. Важно отметить, что коэффициенты такого разложения определяются однозначно.
Для сложения тройки некомпланарных векторов можно применить так называемое правило параллелепипеда. Если есть три некомпланарных вектора, то можно отложить их от одной точки О и далее построить параллелепипед, в котором эти вектора будут ребрами. Тогда диагональ этого параллелепипеда, выходящая из точки О, и будет суммой этих трех векторов:
Разложение вектора на некомпланарные вектора
Иногда вектор можно разложить не на два, а на три вектора. Выглядит такое разложение так:
Для доказательства рассмотрим три некомпланарных вектора а, bи c, а также произвольный вектор р. Отложим их от одной точки О. Обозначим концы этих векторов большими буквами А, В, С и Р:
Через ОВ и ОА можно провести некоторую плос-ть α. Точка С ей принадлежать не может, ведь ОА, ОВ и ОС – некомпланарные вектора. Проведем через Р прямую, параллельную ОС. Так как ОС пересекает α, то и параллельная ей прямая также пересечет α в некоторой точке Р1. (Примечание. Если Р принадлежит α, то точки Р и Р1 совпадут, то есть вектор Р1Р будет нулевым).
Далее через точку Р1 в плос-ти α проведем прямую, параллельную ОВ, которая пересечет ОА в точке Р2. Заметим, что вектор ОР2 находится на той же прямой, что и вектор ОА, то есть они коллинеарны, поэтому существует такое число х, что
Итак, мы показали, что у произвольного вектора p есть разложение на заранее заданные некомпланарные вектора. Осталось показать, что существует только одно такое разложение. Докажем это методом от противного. Пусть есть второе разложение с другими коэффициентами х1, у1 и z1:
В правой части находятся три вектора, которые в сумме нулевой вектор. По правилу сложения векторов это означает, что эти вектора образуют треугольник, то есть находятся в одной плос-ти:
Значит, они компланарны. Тогда компланарны и вектора a, b и с, что противоречит условию теоремы. Значит, второго разложения р на заданные некомпланарные векторы не существует, ч. т. д.
Задание. АВСD и А1В1С1D1 – параллелограммы, располагающиеся в разных плос-тях. Докажите, что тройка векторов ВВ1, СС1 и DD1 компланарна.
Решение. Сначала построим рисунок по условию задачи:
Для доказательства используем признак компланарности векторов. Для этого надо один из векторов, отмеченных на рисунке красным, разложить на два других вектора.
В результате нам удалось разложить СС1 на вектора BB1 и CC1. Значит, эти три вектора коллинеарны.
Задание. В параллелепипеде АВСDA1B1C1D1 запишите разложение вектора BD1 по векторам ВА, ВС и ВВ1.
Решение. Сначала представим вектор BD1 как сумму трех векторов:
Теперь заметим, что вектора С1D1 и ВА соответствуют ребрам параллелепипеда. Эти ребра одинаковы по длине и параллельны, поэтому и вектора будут равными. Аналогично равны вектора СС1 и ВВ1:
Задание. АВСD – тетраэдр, а точка К делит его ребро ВС пополам. Разложите вектор DK по векторам DA, AB и AC.
Решение. Сначала запишем очевидное выражение для вектора DK:
Задание. В точке М пересекаются медианы треугольника АВС, а О – произвольная точка в пространстве. Разложите вектор ОМ по векторам ОА, ОВ и ОС.
Решение. Медиану, проходящую через точку А, мы обозначим как АА1, то есть А1 – это середина отрезка ВС. Также буквой К обозначим середину ОВ:
Сначала разложим вектор ОА1 на ОВ и ОС. Это можно сделать, ведь они компланарны. КА1 – это средняя линия ∆ОСВ, поэтому КА1||ОС и КА1 вдвое короче ОС. Это значит, что
Так как АА1 – медиана, то точка М делит ее в отношении 2:1. Отсюда вытекает следующее соотношение:
Только что решенная задача может быть использована и при решении другого, более сложного задания.
Задание. Докажите, что в параллелепипеде АВСDА1В1С1D1 плос-ти А1ВD и СB1D1 делят диагональ АС1 на три равных отрезка.
Решение. Обозначим точкой K точку пересечения медиан ∆А1ВD. Тогда по формуле, выведенной в предыдущей задаче, мы получаем, что
Это соотношение означает, что вектора АК и АС1 коллинеарны, поэтому они располагаются на одной прямой (они не могут находиться на параллельных прямых, ведь у них есть общая точка А). Значит, точка K принадлежит диагонали АС1, и отрезок АК втрое короче диагонали.
Аналогично можно показать, что и
Из этого также вытекает, что М принадлежит диагонали АС1, и МС1 втрое короче АС1. Значит, точки М и К делят диагональ на три равных отрезка, ч. т. д.
Сегодня мы расширили понятие векторов и научились их применять не только в планиметрических, но и в стереометрических задачах. При сохраняются все правила, по которым выполняются действия над векторами. Также в стереометрии появляется новое понятие компланарных и некомпланарых векторов.
http://ege-study.ru/ru/ege/materialy/matematika/vektory-v-prostranstve-i-metod-koordinat/
http://100urokov.ru/predmety/vektora-v-prostranstve
Введение системы координат
30 мая 2011
Метод координат — это, конечно, очень хорошо, но в настоящих задачах C2 никаких координат и векторов нет. Поэтому их придется вводить. Да-да, вот так взять и ввести: указать начало отсчета, единичный отрезок и направление осей x, y и z.
Самое замечательное свойство этого метода заключается в том, что не имеет никакого значения, как именно вводить систему координат. Если все вычисления будут правильными, то и ответ будет правильным.
Тем не менее, приведу некоторые рекомендации, как лучше ввести систему координат для самых часто встречающихся в задаче C2 многогранников. С указанием конкретных точек. Во всех случаях упор делается на минимизацию объема вычислений.
Координаты куба
Если в задаче C2 будет куб — считайте, что вам повезло. Это самый простой многогранник, все двугранные углы которого равны 90°.
Система координат также вводится очень просто:
- Начало координат — в точке A;
- Чаще всего ребро куба не указано, поэтому принимаем его за единичный отрезок;
- Ось x направляем по ребру AB, y — по ребру AD, а ось z — по ребру AA1.
Обратите внимание: ось z направляется вверх! После двумерной системы координат это несколько непривычно, но на самом деле очень логично.
Итак, теперь у каждой вершины куба есть координаты. Соберем их в таблицу — отдельно для нижней плоскости куба:
| Точка | A | B | C | D |
| Координаты | (0; 0; 0) | (1; 0; 0) | (1; 1; 0) | (0; 1; 0) |
И для верхней:
| Точка | A1 | B1 | C1 | D1 |
| Координаты | (0; 0; 1) | (1; 0; 1) | (1; 1; 1) | (0; 1; 1) |
Несложно заметить, что точки верхней плоскости отличаются соответствующих точек нижней только координатой z. Например, B = (1; 0; 0), B1 = (1; 0; 1). Главное — не запутаться!
Координаты трехгранной призмы
Призма — это уже намного веселее. При правильном подходе достаточно знать координаты только нижнего основания — верхнее будет считаться автоматически.
В задачах C2 встречаются исключительно правильные трехгранные призмы (прямые призмы, в основании которых лежит правильный треугольник). Для них система координат вводится почти так же, как и для куба. Кстати, если кто не в курсе, куб — это тоже призма, только четырехгранная.
Итак, поехали! Вводим систему координат:
- Начало координат — в точке A;
- Сторону призмы принимаем за единичный отрезок, если иное не указано в условии задачи;
- Ось x направляем по ребру AB, z — по ребру AA1, а ось y расположим так, чтобы плоскость OXY совпадала с плоскостью основания ABC.
Здесь требуются некоторые пояснения. Дело в том, что ось y НЕ совпадает с ребром AC, как многие считают. А почему не совпадает? Подумайте сами: треугольник ABC — равносторонний, в нем все углы по 60°. А углы между осями координат должны быть по 90°, поэтому сверху картинка будет выглядеть так:
Надеюсь, теперь понятно, почему ось y не пойдет вдоль AC. Проведем в этом треугольнике высоту CH. Треугольник ACH — прямоугольный, причем AC = 1, поэтому AH = 1 · cos A = cos 60°; CH = 1 · sin A = sin 60°. Эти факты нужны для вычисления координат точки C.
Теперь взглянем на всю призму вместе с построенной системой координат:
Получаем следующие координаты точек:
Как видим, точки верхнего основания призмы снова отличаются от соответствующих точек нижнего лишь координатой z. Основная проблема — это точки C и C1. У них есть иррациональные координаты, которые надо просто запомнить. Ну, или понять, откуда они возникают.
Координаты шестигранной призмы
Шестигранная призма — это «клонированная» трехгранная. Можно понять, как это происходит, если взглянуть на нижнее основание — обозначим его ABCDEF. Проведем дополнительные построения: отрезки AD, BE и CF. Получилось шесть треугольников, каждый из которых (например, треугольник ABO) является основанием для трехгранной призмы.
Теперь введем собственно систему координат. Начало координат — точку O — поместим в центр симметрии шестиугольника ABCDEF. Ось x пойдет вдоль FC, а ось y — через середины отрезков AB и DE. Получим такую картинку:
Обратите внимание: начало координат НЕ совпадает с вершиной многогранника! На самом деле, при решении настоящих задач вы обнаружите, что это очень удобно, поскольку позволяет значительно уменьшить объем вычислений.
Осталось добавить ось z. По традиции, проводим ее перпендикулярно плоскости OXY и направляем вертикально вверх. Получим итоговую картинку:
Запишем теперь координаты точек. Предположим, что все ребра нашей правильной шестигранной призмы равны 1. Итак, координаты нижнего основания:
Координаты верхнего основания сдвинуты на единицу по оси z:
Координаты четырехугольной пирамиды
Пирамида — это вообще очень сурово. Мы разберем только самый простой случай — правильную четырехугольную пирамиду, все ребра которой равны единице. Однако в настоящих задачах C2 длины ребер могут отличаться, поэтому ниже приведена и общая схема вычисления координат.
Итак, правильная четырехугольная пирамида. Это такая же, как у Хеопса, только чуть поменьше. Обозначим ее SABCD, где S — вершина. Введем систему координат: начало в точке A, единичный отрезок AB = 1, ось x направим вдоль AB, ось y — вдоль AD, а ось z — вверх, перпендикулярно плоскости OXY. Для дальнейших вычислений нам потребуется высота SH — вот и построим ее. Получим следующую картинку:
Теперь найдем координаты точек. Для начала рассмотрим плоскость OXY. Здесь все просто: в основании лежит квадрат, его координаты известны. Проблемы возникают с точкой S. Поскольку SH — высота к плоскости OXY, точки S и H отличаются лишь координатой z. Собственно, длина отрезка SH — это и есть координата z для точки S, поскольку H = (0,5; 0,5; 0).
Заметим, что треугольники ABC и ASC равны по трем сторонам (AS = CS = AB = CB = 1, а сторона AC — общая). Следовательно, SH = BH. Но BH — половина диагонали квадрата ABCD, т.е. BH = AB · sin 45°. Получаем координаты всех точек:
![]()
Вот и все с координатами пирамиды. Но не с координатами вообще. Мы рассмотрели лишь самые распространенные многогранники, однако этих примеров достаточно, чтобы самостоятельно вычислить координаты любых других фигур. Поэтому можно приступать, собственно, к методам решения конкретных задач C2.
Смотрите также:
- Четырехугольная пирамида в задаче C2

- Метод координат в пространстве

- Сложение и вычитание дробей

- Не пишите единицы измерения в задаче B12
- Как решать простейшие логарифмические уравнения
- Задача B4: транзит нефти