Министерство
образования Российской Федерации
Сибирский
государственный аэрокосмический
университет имени академика М.Ф.
Решетнева.
Курсовой
проект
по
дисциплине: Цифровые системы управления
и обработки информации.
«Анализ
и синтез цифровой системы управления
с заданной передаточной функцией
непрерывной её части»
Вариант
10б
Выполнила
студентка группы ИУТ-01
Конохова Ю.Е.
Проверил
доцент каф. ИУС
Серегин
Ю.Н.
Красноярск
2012
Содержание
Исходные
данные и задание на курсовой проект
Дан
объект управления, представленный в
виде логарифмической амплитудной
характеристики и следующими показателями:
k=120
– коэффициент усиления
wC=444с-1
– частота среза
Вид
логарифмической амплитудной характеристики
представлен на рисунке 1.


Рис.
1. ЛЧХ исходного объекта регулирования
Структурная
схема исходного объекта регулирования
изображена на рисунке 2.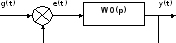
Рис.2.
Структурная схема объекта регулирования
Задание
-
Получить
исходную передаточную функцию объекта
регулирования -
Представить
исходный объект регулирования в виде
ЦСУ и провести его анализ -
Определить
передаточную функцию ЦСУ, отвечающую
показателям качества -
Проверить
показатели качества синтезированной
ЦСУ -
Вычислить
разностное уравнение корректирующей
системы -
Построить
блок-схему алгоритма вычисления
разностного уравнения коррекции
Определение
передаточной функции и параметров
непрерывной части системы
Общий
вид передаточной функции для данной
схемы
(1)



Моей
задачей стояло подобрать коэффициенты
Т1,Т2,
Т3
из формулы (1)
Коэффициенты
Т1
и Т2
находятся левее частоты среза, но Т3,
правее.
Значит, первые две точки надо подобрать
так, чтобы они были больше 1/444,
а третья находилась в промежутке между
1/444 и периодом дискретности 1/(2.5*444).
Т1=0.05
с.
Т2=0.003
с. T3=0.001
с.
Период
дискретности T=
0.0009 с.
Построим
ЛАХ и ФЧХ исходной передаточной функции
(рис 3).

Рис.
3. ЛАХ и ФЧХ исходной передаточной функции
Уравнение
разомкнутой системы


(2)
Исходную
непрерывную систему преобразуем к
цифровому виду, для этого в структурную
схему вводим дискретный элемент, который
в общем виде можно представить в виде
экстраполятора 0 порядка с передаточной
фунцией:

Тогда
структурная схема приобретет вид,
представленный на рисунке 4.
Рис.4.
Структурная схема объекта регулирования
с экстраполятором 0 порядка
Передаточную
функцию разомкнутой системы можно
представить в виде:
(3)
(4)

Z-изображение
формулы (3) имеет вид:

Чтобы
оценить устойчивость необходимо перейти
к замкнутой системе. Общий вид формулы
замкнутой системы:

Используя
выше представленную формулу, получили
уравнение замкнутой системы:

(5)
Для
того чтобы найти корни замкнутой системы
необходимо знаменатель уравнения (5)
приравнять к 0. В результате получаем
следующие значения:
Z1= 1.1430
Z2=0.7684
Исходя
из критерия устойчивости, так как корни
выходят за окружность единичного радиуса
— система не устойчива.
Преобразование дискретной передаточной функции относительно псевдо частоты
Чтобы
использовать частотный метод для синтеза
дискретную передаточную функцию
преобразуем относительно псевдо частоты.
После преобразования получим передаточную
функцию:


(6)
Построим
неизменяемую ЛАХ на псевдо частоте
(рис.5).

Рис.
5. ЛАХ и ФЧХ неизменяемой части системы
на псевдо частоте
Для
того чтобы сделать систему устойчивой
избавимся от звена 2 порядка, разделив
его на 2 апериодических звена. Желаемая
передаточная функция примет вид.
(7)
Для
желаемой системы вычислим передаточную
функцию в z-форме.
(8)

Из
формулы (8) получаем уравнение
скорректированной передаточной функции
на псевдо частоте.

(9)
Построим
ЖЛАХ и ЖФЧХ и ЛАХ и ФЧХ на псевдо частоте
(рис.6).


Рис.
6. ЖЛАХ и ЖФЧХ и неизменяемые ЛАХ и ФЧХ.
Оценка устойчивости жлах
Для
оценки устойчивости синтезированной
системы необходимо привести ее к
замкнутому виду.

(10)
Приравняем
знаменатель уравнения (10) к нулю и найдем
корни синтезированной системы.
Z1= 0.8890
+ 0.0708i
Z2=
0.8890 — 0.0708i
Исходя
из критерия устойчивости, так как корни
находятся внутри окружности единичного
радиуса, значит система устойчива.
Построение
переходного процесса и определение
показателей качества.
Построим
переходной процесс синтезированной
системы для оценки качества.
Используем
единичное воздействие H(z)=Fскорр
(z)*Z{1(t)}

Рис.
7. Переходной процесс синтезированной
системы
Используя
график переходного процесса синтезированной
системы можно определить следующие
динамические характеристики:
tпп=0,032
с. — время переходного процесса.

 =1/(2.5*444)=0,0009
=1/(2.5*444)=0,0009
с. – период дискретности;
Tпп=0.032/
0.0009 — время
регулирования 35 тактов.
σ=
16,7% — перерегулирование.
Из
показателей качества переходного
процесса (рис. 7) следует, что спроектированная
цифровая система управления соответствует
показателям качества, предъявляемым к
техническим системам.
Соседние файлы в папке курсовая docx200
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
![]()
f(t)
x(t)
 |
||||||||
![]()
![]() ε(t)
ε(t)
g(t)=0
Рис.1.12
Эквивалентная
передаточная функция системы, структурная схема которой изображена на рис.1.12,
может быть выражена как
 ;
;

 .
.
Схема моделирования в Matlab
представлена на рис.1.13
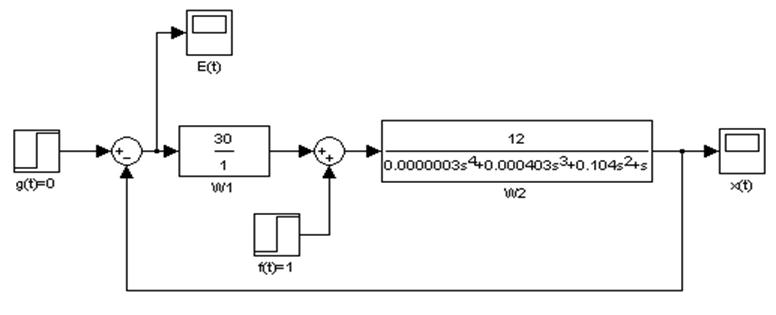
Рис.1.13
Переходная характеристика
замкнутой системы при нулевом задающем воздействии изображения на рис.1.14.
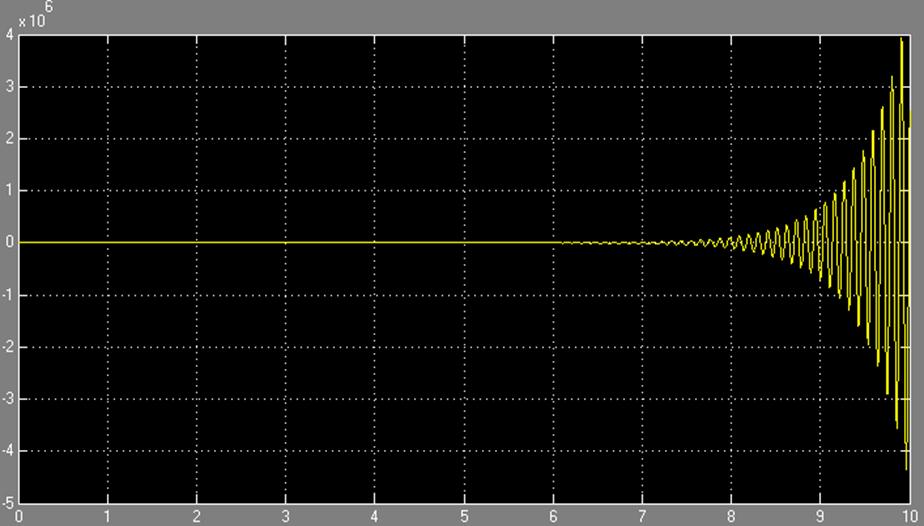
Рис.1.14
Структурная схема
замкнутой системы при нулевом задающем воздействии представлена на рис.1.15.
Выходной сигнал – ошибка.
![]() g(t)=0
g(t)=0
![]()
![]()
![]()
f(t)
ε(t)
 |
||||
Рис.1.15
Эквивалентная
передаточная функция системы по ошибке, структурная схема которой изображена на
рис.1.15, может быть выражена как
 ;
;

Переходная характеристика
ошибки замкнутой системы изображена на рис.1.16.
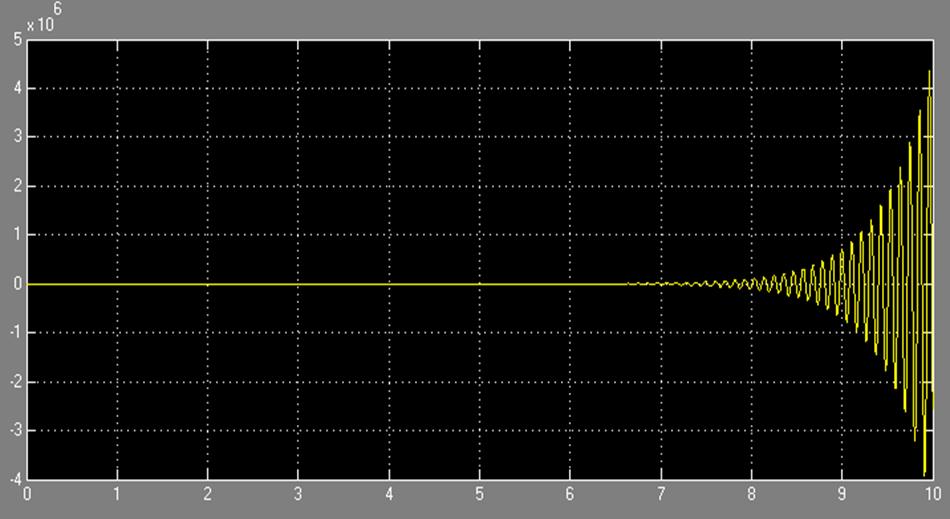
Рис.1.16
В ходе анализа структуры
нескорректированной САУ были получены передаточные функции и переходные
характеристики в разомкнутом и замкнутом состоянии.
2.Анализ устойчивости
нескорректированной САУ.
2.1.Критерий
Гурвица.
Алгебраический критерий
Гурвица звучит следующим образом: необходимым и достаточным условием
устойчивости замкнутой САУ будет выполнение условия, согласно которому все
определители матриц составленных из коэффициентов характеристического уравнения
должны иметь тот же знак что и b0.
Передаточная функция
замкнутой системы имеет вид
 .
.
Характеристическим полиномом
замкнутой системы является знаменатель ее передаточной функции
![]() .
.
Из полученного
характеристического полинома определяют коэффициенты
b0=0.0000003, b1=0.000403, b2=0.104, b3=1, b4=360.
b0>0
![]()
![]()

![]()

![]()
Условие устойчивости по
критерию Гурвица не выполняется. Система не устойчива.
2.2.Критерий
Найквиста.
Замкнутая система
устойчива, если при изменении частоты от 0 до +∞ годограф передаточной функции
разомкнутой САУ охватывал точку (–1 ,j0) λ/2 раз, вращаясь в положительном
направлении.
В рамках критерия
Найквиста рассматривают передаточную функцию разомкнутой системы, которая имеет
вид
 .
.
Откуда характеристическое
уравнение будет выражено как
![]() .
.
Корни характеристического
уравнения разомкнутой системы можно найти с помощью Matlab (рис.2.1)
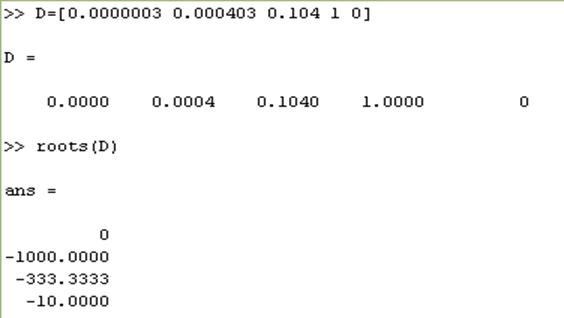
Рис.2.1
Все корни
характеристического уравнения расположены в левой полуплоскости.
Построение АФХ можно
выполнить с помощью Matlab (рис.2.2):
![]()
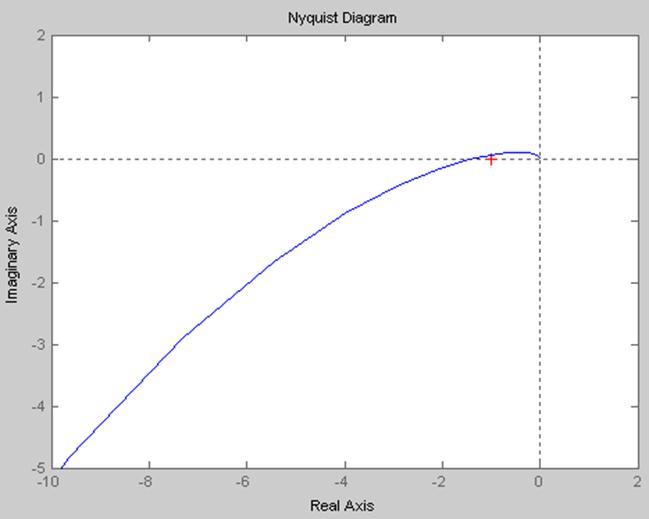
Рис.2.2
Годограф передаточной
функции разомкнутой САУ, изображенный на рис.2.2 охватывает точку (–1 ,j0). Что говорит о не устойчивости системы.
2.3.Критерий
Михайлова.
Для устойчивости линейной
САУ необходимым и достаточным условием является то, что годограф Михайлова при
изменении частоты от 0 до +∞, начав движение из точки, лежащей на положительной
вещественной полуоси, вращаясь только против часовой стрелки, нигде на
обращаясь в нуль, прошел последовательно n-квадрантов и повернулся на угол nπ/2, где n– степень характеристического полинома.
Передаточная функция замкнутой
системы имеет вид
 .
.
Откуда характеристическое
уравнение можно записать как
![]() .
.
С помощью Matlab можно определить корни
характеристического уравнения замкнутой системы (рис.2.3)
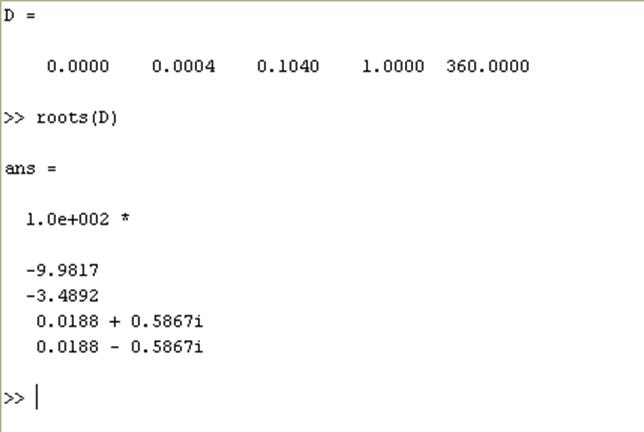
Рис.2.3
На рис.2.4 изображен годограф
Михайлова для замкнутой системы.
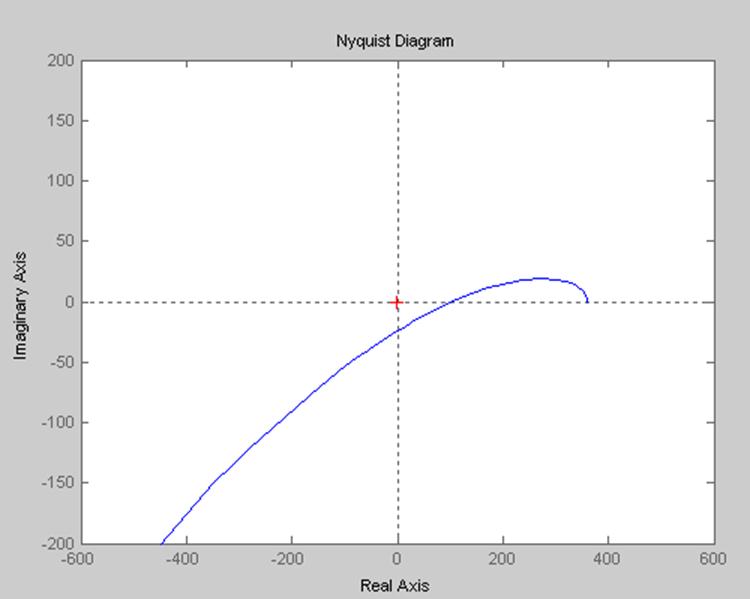
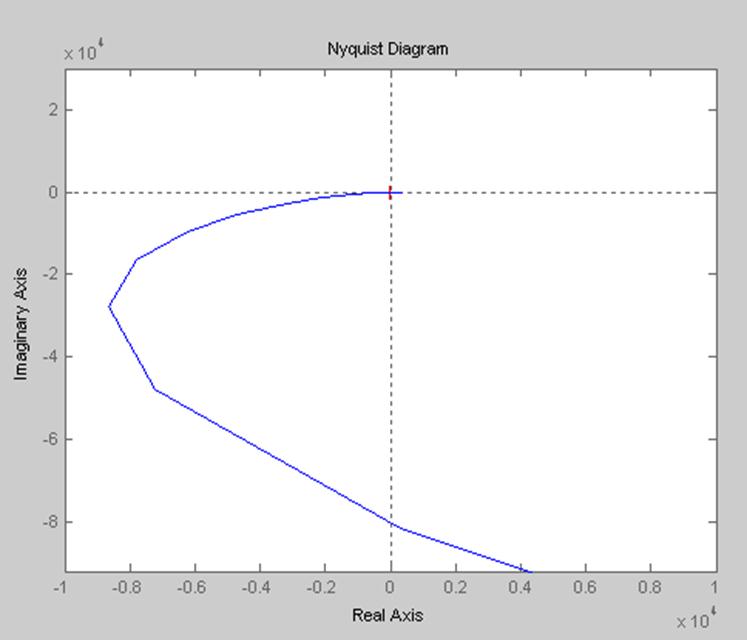
Рис.2.4
Система неустойчива, так
как годограф Михайлова, при изменении частоты от 0 до +∞, повернулся по часовой
стрелке.
2.4.Анализ
логарифмических частотных характеристик.
На рис.2.5 изображены логарифмическая
амплитудная характеристика (ЛАХ) и логарифмическая фазная характеристика (ЛЧХ),
полученные с помощью Matlab.
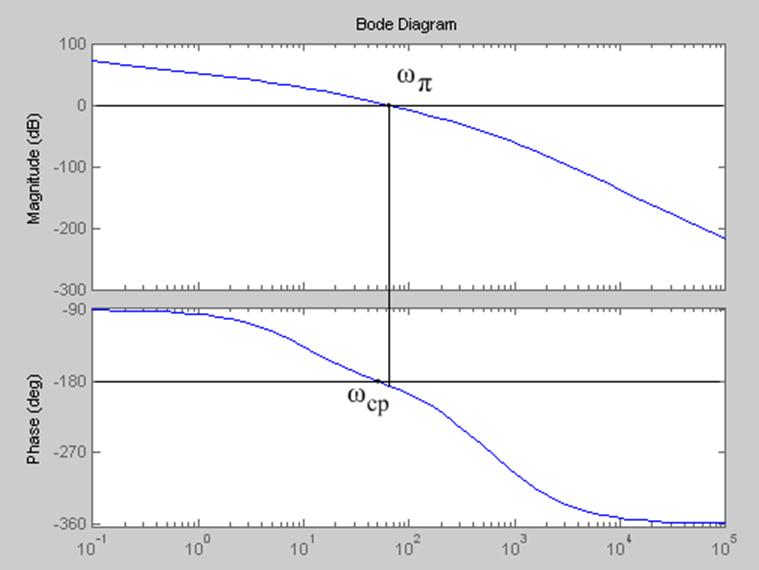
Рис.2.5
По рис.2.5 можно определить ωπ и ωср.
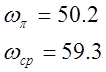
Система неустойчива, так как ![]() .
.
3.Анализ
качества нескорректированной САУ.
Переходные характеристики
замкнутой системы (рис.1.10) расходятся, что делает невозможным определение
времени регулирования и перерегулирование, имеется характерные колебания.
Показатель
колебательности μ – это отношение максимального значения мнимой части
корней характеристического уравнения к соответствующей вещественной.
С помощью Matlab найдем корни характеристического
уравнения замкнутой системы (рис.3.1)
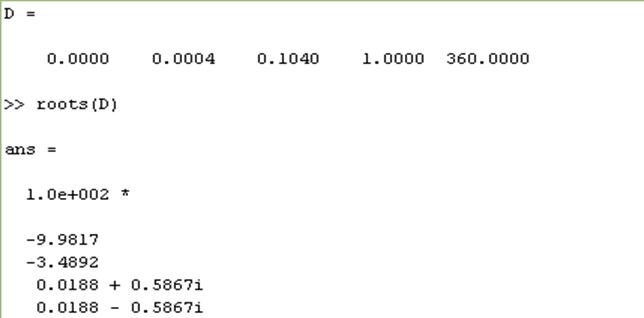
Рис.3.1
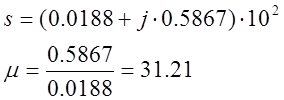
Корень с максимальным значением мнимой части:
Карта
корней характеристического уравнения изображена на рис.3.2
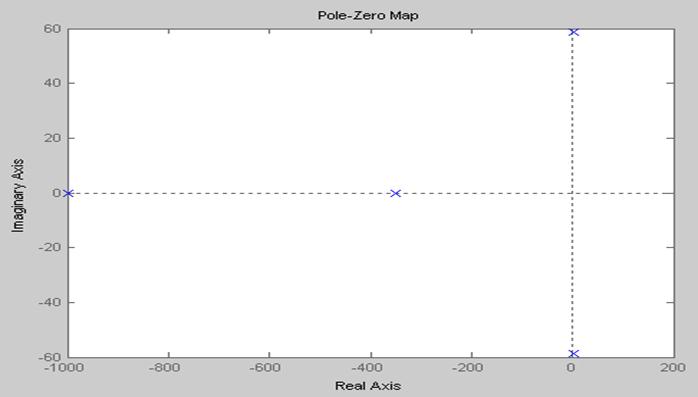
Рис.3.2
Частотные оценки. Запасы
устойчивости.
ЛАХ и ЛЧХ
нескорректированной САУ (рис.3.3)
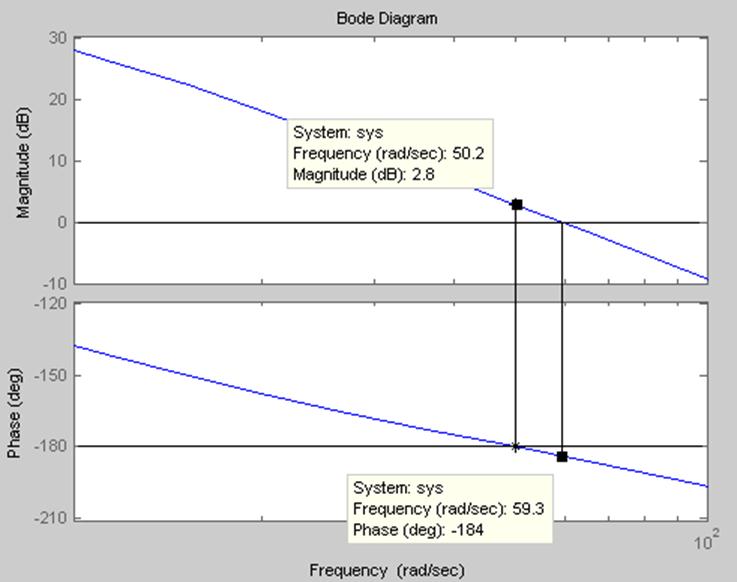
Рис.3.3
Система имеет
отрицательные запасы устойчивости.
4.Синтез
корректирующего устройства.
4.1.Синтез
корректирующего устройства методом Соколова.
На
первом этапе определяется разность порядков полиномов знаменателя (n1) и числителя (m1) передаточной
функции замкнутой нескорректированной системы
(n1—m1).
n1—m1=4-0=4
ν=1
На втором этапе формируется желаемая передаточная функция замкнутой
системы, удовлетворяющая заданным требованиям к качеству синтезируемой
системы на основе нормированных передаточных функций.
Требования к
синтезируемой системе:
sзад=20 %;
![]() =0,25, с
=0,25, с
При
формировании желаемой передаточной функции
 степени m и n соответственно
степени m и n соответственно
полиномов B(S) и A(S) выбирают,
исходя из
следующих соотношений:
m=ν-1=1-1=0,
n=(n1—m1)+ν-l=4+1-1=4,
Нормированная
передаточная функция Фн(р) будет иметь те же порядки n и m. Коэффициенты
этой функции определяют из соответствующей Таблицы А.1 Приложение.
Минимальное время регулирования в приложении.


По переходной
характеристике нормированной функции (рис.4.1) определяют время
переходного процесса τн.
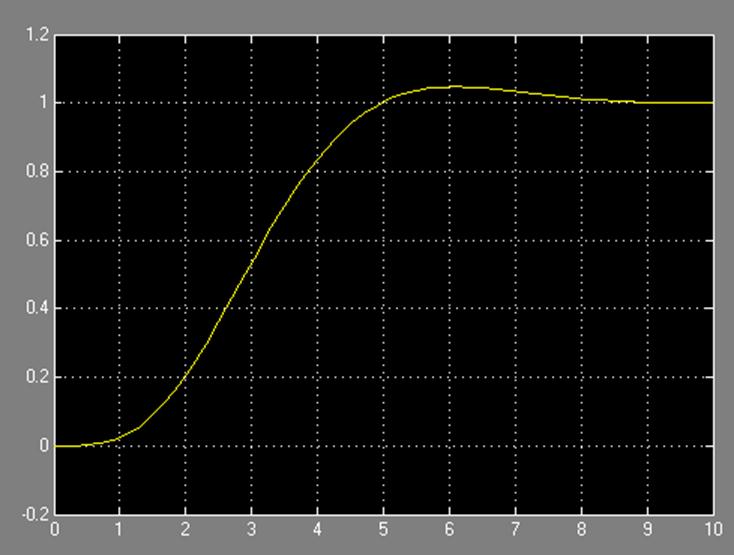
Рис.4.1
τн=4.58 c.
корней характеристического уравнения
Одним из косвенных показателей качества систем управления является степень удаленности корней характеристического уравнения замкнутой САУ от мнимой оси комплексной плоскости. Пусть ближайшие к мнимой оси комплексно-сопряженные корни устойчивой системы имеют значение
 . (7.1)
. (7.1)
Расстояние  (рис. 8.2) ближайших к мнимой оси комплексно-сопряженных корней называется степенью устойчивости системы.
(рис. 8.2) ближайших к мнимой оси комплексно-сопряженных корней называется степенью устойчивости системы.
Угол φ, образуемый лучами, проведенными из начала координат через эти корни, характеризует колебательность системы. Степенью колебательности системы (коэффициентом затухания колебаний) называют количественную характеристику, определяемую выражением
 . (7.2)
. (7.2)
Чтобы система обладала заданной колебательностью, все корни характеристического уравнения должны вписываться в угол 2φ (см. рис. 7.2). Для большинства систем управления допустимое перерегулирование  не должно превышать (10…20)%, что соответствует m=0,2…0,5.
не должно превышать (10…20)%, что соответствует m=0,2…0,5.

Рис. 7.2. Область расположения корней
с заданными показателями и 
При корневых методах оценки качества системы, т. е. по расположению корней характеристического полинома, исходят из следующих соображений.
Решение однородного уравнения, характеризующего свободное движение системы, представляет собой сумму затухающих экспонент вида (6.2). Полагая, что качество САУ в основном определяется ближайшим к мнимой оси вещественным корнем или ближайшей к мнимой оси парой комплексно-сопряженных корней (доминирующих корней), можно записать
 .
.
Полагая, что зона δ установления переходного процесса составляет (2…5)% от установившегося значения  , можно найти требуемое соотношение степени устойчивости системы и времени регулирования tр:
, можно найти требуемое соотношение степени устойчивости системы и времени регулирования tр:
 . (7.3)
. (7.3)
Следовательно, задаваясь временем регулирования, можно рассчитать минимальное (по модулю) значение вещественных частей корней характеристического уравнения.
Аналогично можно связать степень колебательности m системы со степенью затухания колебаний. Пусть по условиям технологии требуется, чтобы каждая последующая амплитуда колебаний затухала в k раз по сравнению с предыдущей. Тогда
 . (7.4)
. (7.4)
Пусть k=10, тогда в соответствие с (7.4) получим m=0,336 и
 .
.
Таким образом, задаваясь временем регулирования  и соотношением амплитуд колебаний k, можно определить допустимую область расположения корней на комплексной плоскости или решить обратную задачу расчета параметров и k переходного процесса по расположению доминирующих корней характеристического уравнения. Следует отметить, что данный подход дает приемлемую точность оценки качества регулирования, если действительные части остальных корней характеристического уравнения больше действительной части доминирующих корней, по крайней мере, в 5 раз [6].
и соотношением амплитуд колебаний k, можно определить допустимую область расположения корней на комплексной плоскости или решить обратную задачу расчета параметров и k переходного процесса по расположению доминирующих корней характеристического уравнения. Следует отметить, что данный подход дает приемлемую точность оценки качества регулирования, если действительные части остальных корней характеристического уравнения больше действительной части доминирующих корней, по крайней мере, в 5 раз [6].
Для построения в плоскости параметров областей, обеспечивающих требуемые показатели качества регулирования целесообразно использовать метод D-разбиения [6]. В качестве примера используем уравнение Вышнеградского, описывающего в параметрической форме характеристический полином 3-го порядка,
 . (7.5)
. (7.5)
где A и B – обобщенные параметры характеристического уравнения.
Подставим выражение для комплексного корня  в (7.5). Тогда получим
в (7.5). Тогда получим
 .
.
Приравнивая нулю вещественную и мнимую части, получим
 ,
,  (7.6)
(7.6)
Полагая  в (7.6), получим границу области устойчивости системы в параметрической форме
в (7.6), получим границу области устойчивости системы в параметрической форме
 (7.7)
(7.7)
 — уравнение гиперболы Вышнеградского (кривая 1, рис. 7.3).
— уравнение гиперболы Вышнеградского (кривая 1, рис. 7.3).

Рис. 7.3. Границы областей устойчивости,
колебательности и апериодичности на
Полагая  в (7.6), получим границу области апериодичности системы в параметрической форме (кривые 2 и 3 на рис. 7.3)
в (7.6), получим границу области апериодичности системы в параметрической форме (кривые 2 и 3 на рис. 7.3)
 .
.
Поскольку на кривой 1 ω ≠ 0, а на кривых 2 и 3 ω = 0, то области I и III являются областями комплексных, а область II – вещественных корней (см. рис. 7.3). Следовательно, если параметры A, B принадлежат области II, то переходные процессы имеют апериодический характер, причем, чем эти параметры больше, тем процессы более затянуты. Если параметры принадлежат области I, то переходные процессы имеют колебательный характер, причем, чем больше A и меньше B, тем выше колебательность. Область III является областью монотонности решения однородного дифференциального уравнения, соответствующего (7.5), а, следовательно, переходные процессы, имея колебательный характер, тем не менее, затухают монотонно (без перерегулирования).
Диаграмма Вышнеградского [19] помимо приведенных кривых содержит кривые равных вещественных частей комплексных корней (равной степени устойчивости), причем для двух случаев расположения корней, когда ближайшими к мнимой оси являются комплексные корни и, когда ближайшим к мнимой оси расположен вещественный корень (на рис. 7.3 эти кривые не показаны). В частности, на границе областей I и III (кривая 4) все три корня равно удалены от мнимой оси.
Требования повысить быстродействие и одновременно снизить перерегулирование в системе являются противоречивыми друг другу, что заставляет искать компромисс. В общем случае, с точки зрения переходного процесса наилучшей считается САУ, у которой все корни характеристического уравнения n-го порядка равны друг другу (на практике редко реализуется), т. е.
 , i=1, 2, 3…n.
, i=1, 2, 3…n.
В этом случае перерегулирование не превышает 10%, а время нарастания регулирования является минимальным.
Если все корни являются вещественными, то система характеризуется отсутствием перерегулирования, т. е. апериодическими переходными процессами. Время регулирования будет тем меньше, чем меньше среднегеометрический корень  или, иначе, чем ближе к мнимой оси расположен центр корней.
или, иначе, чем ближе к мнимой оси расположен центр корней.
При анализе качества системы корневыми методами необходимо учитывать влияние нулей передаточной функции на переходный процесс.
Прежде всего, нужно проверить, насколько близки нули к полюсам.
Если нуль и полюс совпадают, то их нужно сократить, и они не будут влиять на качество системы. Порядок системы при этом, естественно, будет понижен.
Если полюсы и нули передаточной функции не совпадают, то полюсы определяют отдельные составляющие переходного процесса (апериодические и гармонические), а нули определяют удельный вес каждой из этих составляющих. Чем ближе нуль передаточной функции расположен к какому-либо полюсу, тем меньше его вклад в переходную характеристику составляющей, соответствующей данному полюсу.
7.2.2. Интегральные оценки качества
В основе интегральных оценок качества лежит предположение, что качество регулирования тем выше, чем меньше площадь между кривой переходного процесса и заданным значением регулируемой переменной. Интегральные оценки качества являются строгой математической формулировкой понятия качества системы, и их минимизация позволяет определить оптимальные параметры системы управления, т. е. решить задачу параметрического синтеза системы. Для этой цели применяются процедуры безусловной и условной оптимизации [2, 6, 10-12, 19-21].
Наибольшее применение для косвенной оценки качества САУ находят интегральные оценки вида [6, 11, 12, 19]:
 ; (7.8)
; (7.8)
 ; (7.9)
; (7.9)
 ; (7.10)
; (7.10)
 ; (7.11)
; (7.11)
 , (7.12)
, (7.12)
где  — текущая ошибка регулирования, являющаяся функцией времени,
— текущая ошибка регулирования, являющаяся функцией времени,
С – некоторый весовой коэффициент, характеризующий допустимую скорость изменения ошибки регулирования, а, следовательно, выходной координаты в переходном процессе.
В критерии (7.8) подынтегральное выражение линейно относительно ошибки регулирования и такая оценка применяется только для апериодического переходного процесса, когда ошибка имеет положительный знак.
Интегральная квадратичная оценка (ИКО) вида (7.9) применяется при колебательном характере переходных процессов, характеризующихся сменой знака ошибки регулирования. Интегральная квадратичная оценка (7.10) применяется в тех случаях, когда требуется учитывать ограничения энергии управления.
Широко используемым видом оценки качества является интеграл от модуля ошибки (ИМО) – (7.11), позволяющем учесть смену знака подынтегральной функции.
Чтобы уменьшить вклад начальной ошибки в интеграл (7.11) и учесть связанную с этим ошибку была предложена [6] оценка в виде интеграла от взвешенного модуля ошибки (ИВМО) в виде (7.12).
Рассмотрим пример. Пусть передаточная функция замкнутой системы 2-го порядка имеет вид:
 , (7.13)
, (7.13)
где  — коэффициент затухания.
— коэффициент затухания.
Нормированное значение собственной частоты принято  . На рис. 7.4 приведены кривые, отражающие изменение двух из приведенных выше интегральных оценок системы (ИКО и ИВМО) в функции коэффициента затухания [6].
. На рис. 7.4 приведены кривые, отражающие изменение двух из приведенных выше интегральных оценок системы (ИКО и ИВМО) в функции коэффициента затухания [6].

Рис. 7.4. Интегральные оценки
качества системы второго порядка
Как видим, оценка ИВМО по сравнению с ИКО имеет ярко выраженный минимум (хорошую избирательность), соответствующий = 0,707, что для данной системы 2-го порядка обеспечивает наиболее быстрое протекание переходного процесса с перерегулированием около 4,3%.
Рассмотрим еще один пример. Пусть передаточная функция замкнутой системы имеет достаточно общий вид нерекурсивного фильтра n-го порядка:
 . (7.14)
. (7.14)
Безусловная оптимизация систем первого-четвертого порядка (n=1…4), описываемых передаточными функциями (7.14), по критерию ИВМО дает оптимальные значения коэффициентов полиномов знаменателей этих передаточных функций, приведенные в табл. 7.1. Значения коэффициентов нормированы относительно собственной частоты колебаний  .
.
На рис. 7.5 приведены кривые переходных процессов, соответствующих оптимальным по критерию ИВМО фильтрам первого-четвертого порядка.
Значения коэффициентов нормированы относительно собственной частоты колебаний . На рис. 7.5 приведены кривые переходных процессов, соответствующие оптимизации фильтров первого-четвертого порядка по критерию ИВМО.

Рис. 7.5. Переходные характеристики, соответствующие
оптимизации систем по ИВМО
Графики построены в зависимости от нормированного времени  .
.
Кроме приведенных оценок для оптимизации систем управления применяются и другие интегральные критерии качества, в частности, лежащие в основе синтеза фильтров Баттерворта, широко применяемых при настройке контуров электромеханических систем управления.
8. Метод пространства состояний
Широкое распространение компьютеров и мощных систем программирования побуждает к исследованию САУ во временной области, а, следовательно, к непосредственному использованию описания динамических систем управления в форме обыкновенных дифференциальных уравнений без перехода к операторной форме. Кроме того, как уже отмечалось, векторно-матричные формы описания и исследования применимы не только к одномерным, линейным, стационарным САУ, но и к широкому классу многомерных, нелинейных и нестационарных САУ.
Чтобы получить пригодную для компьютерного синтеза и анализа модель САУ, необходимо представить ее в переменных состояния системы, используя далеко не единственный набор переменных. Следует отметить, что описание систем во временной области в векторно-матричной форме лежит в основе современной теории управления и оптимизации. В настоящей главе рассмотрены вопросы применения метода пространства состояния к непрерывным системам управления.
8.1. Векторно-матричное описание САУ
Состояние системы – это совокупность значений переменных системы (координат состояния), существенных с точки зрения решаемой задачи. В общем случае, в это число включают не только выходные и внутренние переменные САУ, но и задающие воздействия, и доминирующие возмущающие воздействия внешней среды. Чем полнее достоверной информации о состоянии системы в текущий момент времени, тем проще определить будущие значения всех ее переменных. Инженерно-технический персонал, разрабатывающий и эксплуатирующий технические системы управления, оперирует, как правило, с такими физическими переменными, которые могут быть измерены с помощью соответствующих датчиков. К таким физическим переменным САУ относят ускорение, скорость, перемещение, давление, расход, температуру, уровень и т. п. Координатами датчиков технологических координат САУ являются другие переменные — напряжение, ток, частота следования импульсов, двоичный код и т. п., что дает исследователю возможность выбора для синтеза и анализа необходимого набора координат состояния САУ.
Векторно-матричная модель многомерной, нелинейной, нестационарной САУ записывается в виде [6, 10, 11, 19]

 ,
,
 , (8.1)
, (8.1)
где X(t), U(t),F(t), Y(t) – соответственно векторы состояния, управления, возмущения и выходных (управляемых) координат системы,
 – вектор первых производных координат состояния,
– вектор первых производных координат состояния,
 – нелинейные, нестационарные функции координат состояния, управления и возмущения системы.
– нелинейные, нестационарные функции координат состояния, управления и возмущения системы.
В уравнении (8.1) вектор управления U(t) является, в общем случае, некоторой нелинейной нестационарной функцией задающих координат, координат состояния и возмущения САУ и призван обеспечить оптимальное управление системой. Описание многомерных, нелинейных, нестационарных САУ в форме (8.1) не позволяет, как правило, получить инженерное решение задачи структурно-параметрического синтеза оптимального управления U(t) или такое решение приводит к неоправданным затратам на реализацию (в техническом или экономическом аспектах). В большинстве случаев такие модели сводят к одномерным или многомерным линейным (линеаризованным) квазистационарным моделям, для которых имеются развитые методы и инженерные методики синтеза оптимального управления.
Линейную (линеаризованную) модель многомерной стационарной (квазистационарной) САУ представляют в виде системы обыкновенных дифференциальных уравнений первого порядка в форме Коши:

 ,
,
 , (8.2)
, (8.2)
 .
.
Эту же систему дифференциальных уравнений можно представить в векторно-матричной форме [6, 11, 19]:
 , (8.3)
, (8.3)
где  — векторы (векторы-столбцы) соответственно состояния и управления САУ,
— векторы (векторы-столбцы) соответственно состояния и управления САУ,
 ,
,  ;
;
 — символ транспонирования (иногда для обозначения транспонирования применяют буквенный символ “т”);
— символ транспонирования (иногда для обозначения транспонирования применяют буквенный символ “т”);
 — стационарные матрицы соответственно состояния и управления,
— стационарные матрицы соответственно состояния и управления,
 ,
,  .
.
В общем случае, на объект управления помимо управляющих воздействий действуют возмущающие воздействия. В этом случае векторно-матричную модель системы представляют в виде
 , (8.4)
, (8.4)
где  — вектор-столбец возмущающих воздействий САУ, C – стационарная матрица возмущений,
— вектор-столбец возмущающих воздействий САУ, C – стационарная матрица возмущений,
 ,
,
 .
.
Выходные (управляемые) переменные не всегда непосредственно принадлежат вектору состояния. В линейных САУ они линейно связаны с переменными состояния, управляющими и возмущающими переменными. В этом случае к уравнениям (8.3), (8.4) присоединяют алгебраические линейные уравнения
 (8.5)
(8.5)
или  , (8.6)
, (8.6)
где  — вектор выходных переменных САУ,
— вектор выходных переменных САУ,  ;
;
K, L, M – стационарные матрицы соответственно размерностей (r  n), (r m), (r d).
n), (r m), (r d).
Следует отметить, что приведенные уравнения (8.1)…(8.6) дают описание лишь объекта управления или разомкнутой системы, если вектор управления U(t) не является функцией координат состояния САУ. В замкнутых линейных САУ управление обычно формируют как линейную форму координат состояния и, в общем случае, возмущения САУ.
В качестве примера приведем векторно-матричное описание ранее рассматриваемого электродвигателя постоянного тока как объекта регулирования по цепи якоря. Пусть выходной (регулируемой) координатой является скорость вращения двигателя. Полагая, что напряжение возбуждения  , а магнитный поток
, а магнитный поток  , математическую модель электродвигателя можно представить в виде:
, математическую модель электродвигателя можно представить в виде:

 ,
,
 . (8.7)
. (8.7)
Воспользуемся векторно-матричной моделью линейных САУ в виде (8.4), (8.5). Зададимся векторами состояния, управления и возмущения в виде:

 ;
;  ;
;
 (8.8)
(8.8)
По уравнениям (8.7) найдем матрицы состояния, управления и возмущения:

 ;
;  ;
;  . (8.9)
. (8.9)
Поскольку выходная переменная всего одна и ей является координата состояния  , уравнение выхода преобразуется к скалярной форме
, уравнение выхода преобразуется к скалярной форме
 . (8.10)
. (8.10)
По описанию системы в форме векторно-матричных уравнений (ВМУ) можно непосредственно получить эквивалентную передаточную функцию (ПФ) и, наоборот, зная ВМУ системы, можно получить ее ПФ. Для этого в системе MATLAB имеется две функции: функция tf и функция ss.
Пусть ВМУ системы имеет вид (8.3), (8.5). Применительно к системе MATLAB ВМУ записывают в виде



Для получения ВМУ в системе MATLAB необходимо определить функцию ss(A,B,C,D). Для преобразования ВМУ к ПФ системы необходимо записать:
sys_ss=ss(A,B,C,D); % Формирование ВМУ системы;
sys_tf=tf(sys_ss), % Преобразование ВМУ к ПФ системы.
Для обратного преобразования ПФ к ВМУ необходимо записать:
sys_tf=tf(num,den); % Формирование ПФ системы;
sys_ss=ss(sys_tf); Преобразование ПФ к ВМУ системы.
Рассмотрим пример. Пусть ПФ системы имеет вид
 .
.
Тогда запишем скрипт преобразования ПФ к ВМУ и обратного преобразования ВМУ к ПФ:
sys_tf=tf(num,den); % Формирование ПФ системы;
sys_ss=ss(sys_tf); %Преобразование ПФ к ВМУ системы;
Корни характеристического уравнения замкнутой системы
Характер свободного движения всей системы при наличии различных корней определяется суммой свободных составляющих формулы (3.3.), причем система бывает устойчивой, если все вещественные корни отрицательные и комплексные корни имеют отрицательную вещественную часть. Если корни нанести на плоскость комплексного переменного, то можно выделить устойчивые, неустойчивые и нейтральные зоны.
 устойчивые
устойчивые


 неустойчивые
неустойчивые
Линейная САУ устойчива, если корни характеристического уравнения расположены слева от мнимой оси. Система считается нейтральной, если корни принадлежат мнимой оси.
Неустойчивой система считается для случая, когда корни лежат справа от мнимой оси.
Вышеперечисленные условия устойчивости используются для формулирования необходимого условия устойчивости линейных САУ.
Кроме выше записанного необходимое условие устойчивости можно записать, используя известное в математике выражение:
 (3.6.)
(3.6.)
Подставив в выражение (3.6.) только устойчивые корни характеристического уравнения можно заметить, что после раскрытия скобок в уравнении (3.6.) устойчивой системы все коэффициенты характеристического уравнения будут положительными.
Необходимое условие устойчивости – положительность всех коэффициентов характеристического уравнения. В том случае, если один из коэффициентов отрицателен – линейную систему нельзя считать устойчивой.
Для уравнений первого и второго порядка условие положительности коэффициентов характеристического уравнения является кроме необходимого еще и достаточное условие. Это можно охарактеризовать тем, что уравнения первого и второго порядка просты для нахождения корней. Начиная с третьего и выше порядков характеристические уравнения трудно разрешить в нахождении корней простыми способами вычисления. Поэтому в теории автоматического управления разработаны упрощенные правила – критерии нахождения устойчивости линейных систем.
Существует два вида критериев: алгебраические и частотные. С математической точки зрения все рассматриваемые критерии равнозначны.
§ 3.2.3 Алгебраический критерий устойчивости. Критерий Рауса
Данный критерий устойчивости был разработан в 1878 г . английским математиком Раусом и который был сформулирован в виде некого правила или алгоритма, который можно представить в виде таблицы (матрицы).
Таблица Рауса составляется на основании характеристического уравнения линейной системы вида:
 (3.7.)
(3.7.)
Покажем эту таблицу:

















Порядок заполнения таблицы Рауса:
1) в первой строке таблицы Рауса в порядке увеличения индексов записываются коэффициенты характеристического уравнения (3.7), имеющие четный индекс:  ;
;
2) во второй строке записывают в порядке возрастания индексов коэффициенты характеристического уравнения (3.7.) с нечетными индексами:  и т.д.
и т.д.
Любой из остальных коэффициентов таблицы Рауса записывается в соответствии со следующими выражениями:
 (3.8.)
(3.8.)
к – столбец, i – строка
 (3.9.)
(3.9.)
Число строк таблицы Рауса равно степени характеристического уравнения + 1  .
.
Условие устойчивости Рауса: для того, чтобы линейная САУ была устойчивой необходимо и достаточно чтобы коэффициенты первого столбца таблицы Рауса имели один и тот же знак, т.е. при  должны быть положительными.
должны быть положительными.

§ 3.2.4 Алгебраический критерий устойчивости. Критерий Гурвица
В 1895 г . немецкий математик Гурвиц разработал алгебраический критерий устойчивости в форме определителей, состоящих из коэффициентов характеристического уравнения (3.7).
В основе рассматриваемого критерия лежит построение главного определителя Гурвица из коэффициентов характеристического уравнения (3.7).
Порядок составления главного определителя Гурвица:
1. Записываем главную диагональ определителя Гурвица, составленную из коэффициентов характеристического уравнения от  до
до  ;
;
2. Вверх от главной диагонали записывают столбцы, составленные из коэффициентов характеристического уравнения с последовательно возрастающими индексами;
3. Вниз от главной диагонали записываем столбцы составленные из коэффициентов характеристического уравнения с последовательно убывающими индексами;
4. Оставшиеся пустые места определителя заполняются нулями, т.е. нули проставляются на места, где должны быть коэффициенты с индексами больше 0 и меньше  .
.
Главный определитель Гурвица имеет вид:
После построения главного определителя Гурвица, в нем очеркиваются диагональные миноры и тем самым получаются определители более низших порядков.


 (3.11)
(3.11)
 ……………….
……………….
Критерий устойчивости Гурвица: для того, чтобы система автоматического управления (САУ) была устойчивой необходимо и достаточно, чтобы все определители Гурвица (3.11) имели знаки одинаковые со знаком первого коэффициента характеристического уравнения  , т.е. при
, т.е. при  все определители должны быть положительными:
все определители должны быть положительными:


 (3 .12)
(3 .12)

В случае, если хоть одно из условий не выполняется, то систему считают неустойчивой.
Раскрывая все определители Гурвица можно для уравнений 1-го, 2-го, 3-го и 4-го порядков записать более простую форму критерия устойчивости. Такая форма записи получила название следствия из критерия Гурвица или ее называют критерием Леера-Шепорда.
1) Для характеристического уравнения 1-го порядка:


необходимым и достаточным является, чтобы:
, 
2) Для характеристического уравнения 2-го порядка:


необходимым и достаточным является, чтобы:

3) Для характеристического уравнения 3-го порядка:


необходимым и достаточным является, чтобы:


4) Для характеристического уравнения 4-го порядка:


необходимым и достаточным является, чтобы:
§ 3.2.5 Частотный критерий устойчивости. Критерий Михайлова
Все частотные критерии, в том числе и критерий Михайлова, основаны на хорошо известном из курса высшей математики «Принципа аргумента», который позволяет отобразить необходимое условие устойчивости на частотной плоскости.
Все элементарные вектора  изображаются на комплексной плоскости. Задаваясь изменением частоты
изображаются на комплексной плоскости. Задаваясь изменением частоты  от
от  до
до  будем наблюдать поворот единичных векторов. Анализ их изменения показывает, что устойчивые вектора поворачиваются отлично от неустойчивых. Такое наблюдение позволило сделать четкий вывод о значении угла поворота устойчивой системы в зависимости от числа правых и левых корней (левыми считаются устойчивые корни, а правыми – неустойчивые корни).
будем наблюдать поворот единичных векторов. Анализ их изменения показывает, что устойчивые вектора поворачиваются отлично от неустойчивых. Такое наблюдение позволило сделать четкий вывод о значении угла поворота устойчивой системы в зависимости от числа правых и левых корней (левыми считаются устойчивые корни, а правыми – неустойчивые корни).
Этот частотный критерий устойчивости был сформулирован в 1938 г . советским ученым Михайловым и является интерпретацией принципа аргумента, позволяя судить об устойчивости системы наблюдая за поведением кривой называемой кривой Михайлова.
За основание построения кривой берется характеристический полином вида:

Произведя замену  получим характеристический полином Михайлова:
получим характеристический полином Михайлова:
 (3.18)
(3.18)


При изменении частоты вектор  будет изменяться как по величине, так и по направлению, описывая своим окончанием некоторую кривую, называемую кривой Михайлова или годографом Михайлова.
будет изменяться как по величине, так и по направлению, описывая своим окончанием некоторую кривую, называемую кривой Михайлова или годографом Михайлова.
Для устойчивых систем кривая Михайлова начинаясь при  на вещественной положительной полуоси, при увеличении частоты , описывает относительно начала координат некую линию.
на вещественной положительной полуоси, при увеличении частоты , описывает относительно начала координат некую линию.
Критерий Михайлова: для того, чтобы САУ была устойчивой, необходимо и достаточно, чтобы кривая или годограф Михайлова при изменении  начинаясь при на вещественной полуоси, обходила только против часовой стрелки последовательно n -квадрантов комплексной плоскости, нигде не обращаясь в нуль ( n – степень характеристического полинома (уравнения)).
начинаясь при на вещественной полуоси, обходила только против часовой стрелки последовательно n -квадрантов комплексной плоскости, нигде не обращаясь в нуль ( n – степень характеристического полинома (уравнения)).

Нейтральные САУ (граница устойчивости):
Анализируя кривую Михайлова можно вывести следствие из него: при прохождении кривой Михайлова числа квадрантов комплексной плоскости, происходит последовательное поочередное пересечение действительной и мнимой соей, т.е.:

Значение частот при которых происходит пересечение кривой с вещественной или мнимой осью, должны является корнями уравнений (3.20) и (3.21), причем  корни уравнения (3.21), а
корни уравнения (3.21), а  — корни уравнения (3.20). При этом корень с большим индексом по значению, также больше корня с меньшим индексом, то обязательно должно выполняться следующее неравенство:
— корни уравнения (3.20). При этом корень с большим индексом по значению, также больше корня с меньшим индексом, то обязательно должно выполняться следующее неравенство:

В связи с выше записанным следствие кривой Михайлова можно сформулировать следующим образом: САУ будет устойчивой тогда и только тогда, когда вещественная  и мнимая
и мнимая  функции Михайлова приравненные к нулю, имеют все действительные и перемеживающиеся корни, причем общее число корней равно n и при выполняется следующее условие:
функции Михайлова приравненные к нулю, имеют все действительные и перемеживающиеся корни, причем общее число корней равно n и при выполняется следующее условие:

Для реализации этого следствия определяются только корни уравнения  . Перемежаемость корней можно проверить подставив в
. Перемежаемость корней можно проверить подставив в  найденные корни . Знаки значений при подстановке возрастающих по значению корней должны чередоваться (+ — + — + и т.д.). Если что-то не так – система является неустойчивой.
найденные корни . Знаки значений при подстановке возрастающих по значению корней должны чередоваться (+ — + — + и т.д.). Если что-то не так – система является неустойчивой.
§ 3.2.6 Частотный критерий. Критерий Найквиста
Этот критерий разработан в 1923 г . американским ученым Найквистом. Он позволяет судить об устойчивости замкнутой системы по поведению АФЧХ разомкнутой системы.
Вектор  разомкнутой системы при изменении частоты от до меняется по величине и фазе.
разомкнутой системы при изменении частоты от до меняется по величине и фазе.
Кривая, описываемая окончанием этого вектора есть АФЧХ разомкнутой системы, причем следует отметить, что вид этой характеристики симметричен относительно начала координат, т.е.
Для доказательства критерия Найквиста используют дополнительную функцию вида:

Причем в знаменателе такой функции будет записан характеристический полином разомкнутой системы, а в числителе характеристический полином замкнутой системы:
В случае замены оператора Лапласа р на , получим частотную функцию вида:
Пусть характеристическое уравнение замкнутой системы  имеет
имеет  — правых корней и
— правых корней и  — левых корней, а характеристическое уравнение разомкнутой системы
— левых корней, а характеристическое уравнение разомкнутой системы  имеет
имеет  правых и
правых и  левых корней (под правыми корнями подразумевают корни лежащие справа от мнимой оси комплексной плоскости и определяющие неустойчивость функционирования системы).
левых корней (под правыми корнями подразумевают корни лежащие справа от мнимой оси комплексной плоскости и определяющие неустойчивость функционирования системы).
При рассмотрении этого критерия так же работает принцип аргумента, который определяет, что устойчивой система является, когда вектор  повернется на соответствующий угол.
повернется на соответствующий угол.
Разомкнутая система являющееся неустойчивой и имеющая правых корней будет определять, что замкнутая система устойчивая тогда и только тогда, когда АФЧХ вспомогательной функции при изменении частоты от  до охватывает начало координат в положительном направлении
до охватывает начало координат в положительном направлении  — раз.
— раз.
Найквистом было отмечено, что движение вектора вокруг начала координат равно числу оборотов вектора  вокруг точки с координатами
вокруг точки с координатами  .
.
Критерий устойчивости Найквиста: если разомкнутая система автоматического управления неустойчива, то для того чтобы замкнутая система была устойчивой необходимо и достаточно, чтобы АФЧХ разомкнутой системы при изменении частоты от до охватывала точку с координатами в положительном направлении — раз (где число правых корней характеристического уравнения разомкнутой системы).
При сложной форме характеристик может возникнуть затруднение при определении числа оборотов вокруг критической точки с координатами  .
.
Для анализа поведения таких характеристик применяют «правило переходов» Ципкина. Назовем переход АФЧХ через действительную ось слева от точки при возрастании положительным (если характеристика пересекает вещественную ось сверху-вниз), а справа от точки отрицательным. Также отрицательным считается переход слева от точки , но совершённым при пересечении вещественной оси снизу-вверх. В этом случае, если АФЧХ начинается на отрезке  при или заканчивается на нем при
при или заканчивается на нем при  , считается, что АФЧХ совершила пол перехода.
, считается, что АФЧХ совершила пол перехода.
Критерий Найквиста для рассматриваемого варианта: если разомкнутая САУ неустойчива, то для того чтобы замкнутая система стала устойчива необходимо и достаточно, чтобы разность между положительным и отрицательным переходами АФЧХ разомкнутой системы через отрезок вещественной оси при изменении от до была равна — раз.
Критерий Найквиста для случая, когда разомкнутая система устойчива имеет следующую формулировку: если САУ разомкнутая устойчива, то замкнутая система будет устойчивой, если АФЧХ разомкнутой системы не охватывает точку с координатами .
Достоинство критерия Найквиста заключается в том, что его можно использовать даже если неизвестны структуры отдельных звеньев системы, достаточно получить АФЧХ. Кроме того, рассматриваемый критерий позволяет анализировать устойчивость систем обладающих запаздыванием.
§ 3.2.7. Частотный критерий устойчивости – логарифмический частотный критерий
Критерий Найквиста позволяет судить от устойчивости системы по логарифмическим частотным характеристикам, т.е. можно заметить, что критерий Найквиста можно анализировать используя простые с точки зрения построения логарифмические частотные характеристики. Поэтому рассматриваемый критерий часто называют критерием Найквиста в логарифмической форме.
Передаточная функция разомкнутой системы обычно представляет собой произведение элементарных динамических звеньев, асимптотические характеристики которых представляют собой ломаные прямые линии.
Устойчивость с использованием логарифмического критерия позволяет построив совмещено ЛАЧХ и ЛФЧХ разомкнутой системы судить об устойчивости замкнутой системы.
Замкнутая система автоматического управления устойчива, если при  соответствующая ЛФЧХ проходит таким образом, что фаза
соответствующая ЛФЧХ проходит таким образом, что фаза  не превосходит значения
не превосходит значения  .
.
1) система устойчивая в разомкнутом состоянии будет устойчивой и в замкнутом, если точка А ЛФЧХ определяемая фазой соответствует области отрицательных значений логарифмической амплитуды  ;
;
2) САУ неустойчивая в разомкнутом состоянии будет устойчива в замкнутой, если при изменении от 0 до разность чисел положительных и отрицательных переходов ЛФЧХ через значение  лежащих в области положительных равна половине числа корней , где
лежащих в области положительных равна половине числа корней , где  — число правых корней характеристического уравнения разомкнутой системы.
— число правых корней характеристического уравнения разомкнутой системы.
Следствие к первому случаю: САУ будет устойчивая в замкнутом состоянии, если ЛФЧХ неустойчивой разомкнутой системы при будет проходить через ординату -180º одинаковое число раз как в положительном, так и отрицательном направлениях.
§ 3.2.8. Запасы устойчивости
При проектировании систем автоматики стремятся обеспечить их устойчивость с некоторой гарантией, чтобы изменение параметров системы в процессе ее работы не могли привести к неустойчивости системы. Для реализации такого тезиса необходимо, чтобы система обладала определенным запасом устойчивости. Запас устойчивости определяет удаленность параметров системы от границы устойчивости.
Положение системы на границе устойчивости можно определить, используя критерий устойчивости. Качественную характеристику удаления системы от границы устойчивости дают критерии Гурвица и Михайлова. Четкую количественную характеристику запаса устойчивости как по амплитуде, так и по фазе дает критерий Найквиста и логарифмический критерий.
В соответствии с критерием Найквиста система находится на границе устойчивости, если годограф Найквиста проходит через точку с координатами  . Такая граница носит название колебательной границы устойчивости. В логарифмических координатах такое действие может произойти, если частота среза совпадает с точкой пересечения ЛФЧХ значения — 180º.
. Такая граница носит название колебательной границы устойчивости. В логарифмических координатах такое действие может произойти, если частота среза совпадает с точкой пересечения ЛФЧХ значения — 180º.
Покажем использование критерия Найквиста для нахождения запаса устойчивости по фазе и амплитуде:
 — запас по фазе.
— запас по фазе.
Запас устойчивости по модулю может быть в данном случае рассчитан как:
Значение модуля АФЧХ разомкнутой системы  при
при  зависит от значения коэффициента усиления (передачи). Поэтому часто запас устойчивости по модулю называют запасом по усилению и определяют как отношение предельного коэффициента передачи к текущему:
зависит от значения коэффициента усиления (передачи). Поэтому часто запас устойчивости по модулю называют запасом по усилению и определяют как отношение предельного коэффициента передачи к текущему:
 ,
,
где  — значение коэффициента, при котором модуль частотной передаточной функции разомкнутой системы равен единице и система находится на границе устойчивости. В том случае если
— значение коэффициента, при котором модуль частотной передаточной функции разомкнутой системы равен единице и система находится на границе устойчивости. В том случае если  , то система уходит за пределы устойчивости.
, то система уходит за пределы устойчивости.
Запас устойчивости по фазе измеряется по дуге окружности единичного радиуса между отрицательной частью  и ближайшей точкой пересечения окружности с годографом Найквиста.
и ближайшей точкой пересечения окружности с годографом Найквиста.
Определение устойчивости по логарифмическим частотным характеристикам может быть осуществлено достаточно простым способом. Необходимо на совмещенных логарифмических частотных характеристиках построить вертикальные проекции между осью абсцисс и значением -180º которые проведены через точки  и А. В результате чего получим:
и А. В результате чего получим:
 — запас по амплитуде.
— запас по амплитуде.
Запасы устойчивости влияют не только на работоспособность (устойчивость) системы, но также характеризуют качество работы системы. В реальных системах обычно = 15…20 дБ, = 30…50º.
§ 3.2.9. Устойчивость систем обладающих запаздыванием
Значительное число объектов сельскохозяйственного назначения описываются математической моделью, в состав которой входит звено транспортного запаздывания, при этом общая передаточная функция такой системы состоит из произведения передаточной функции линейной части системы и передаточной функции звена транспортного запаздывания

Частотная передаточная функция в данном случае может быть записана в виде:
 ,
,
где  — АЧХ линейной части;
— АЧХ линейной части;
 — ФЧХ системы с учетом звена транспортного запаздывания.
— ФЧХ системы с учетом звена транспортного запаздывания.
Звено чистого запаздывания не изменяет амплитуду АФЧХ, но создает дополнительный отрицательный сдвиг по фазе, зависящий от частоты . Устойчивость САУ с запаздыванием наиболее просто определить по критерию Найквиста, при этом АФЧХ такой системы строится следующим образом: сначала строят годограф  , а затем каждую i -тую точку годографа доворачивают на угол
, а затем каждую i -тую точку годографа доворачивают на угол  по часовой стрелке.
по часовой стрелке.
Оценку устойчивости систем с запаздыванием можно также выполнить используя логарифмический частотный критерий.
Очень часто анализируя устойчивость рассмотренных систем необходимо бывает установить значение запаздывания при котором система находится на границе устойчивости. Такое время носит название критического времени запаздывания и оно определяется из следующего выражения:

§ 3.3. Качества работы САУ
§ 3.3.1. Общие положения о качестве работы
Факт устойчивости или неустойчивости САУ говорит лишь о том, что переходная или свободная составляющая процесса регулирования с течением времени расходится или затухает, но такой анализ не дает ответа на такие важные вопросы как: быстрота затухания переходного процесса, форма кривой процесса регулирования и т.д. Поэтому следует отметить, что теория устойчивости является необходимым, но не достаточным условием практической пригодности САУ. Любая такая система кроме устойчивости должна еще обладать и требуемым качеством работы. Качество работы систем автоматики характеризует точность ее работы как в установившемся так и переходном режимах. Иными словами можно отметить, что качество работы системы автоматики характеризует точность воспроизведения системой задающего воздействия.
Проблема качества систем автоматики может быть поставлена как задача анализа, т.е. оценка уже спроектированной САУ или как задача синтеза, т.е. проектирование САУ заранее оговоренными показателями качества. При рассмотрении таких задач будем полагать, что САУ описывается системой дифференциальных уравнений с постоянными коэффициентами. При изменении воздействия  на входе системы выходную величину
на входе системы выходную величину  можно записать:
можно записать:
 ,
,
где — решение дифференциального уравнения, описывающего движение САУ;
 — общее решение, соответствующее однородному дифференциальному уравнению. В случае отсутствия кратных корней зависит от вида корней характеристического уравнения;
— общее решение, соответствующее однородному дифференциальному уравнению. В случае отсутствия кратных корней зависит от вида корней характеристического уравнения;
 — вынужденная или установившаяся составляющая переходного процесса, обуславливаемая законом изменения .
— вынужденная или установившаяся составляющая переходного процесса, обуславливаемая законом изменения .
Качество работы системы автоматики можно оценить по виду переходного процесса и по его составляющим и . В связи с чем различают две группы показателей качества:
1) показатели качества переходного процесса ;
2) показатели качества, характеризующие вынужденную составляющую и определяющие точность воспроизведения предписанной величины.
Показатели качества, определяемые непосредственно по кривой переходного процесса называют прямыми оценками качества, косвенные оценки качества не требуют нахождение кривой переходного процесса. Косвенные методы разделяют на: корневые, интегральные и частотные.
§ 3.3.2. Оценка качества регулирования при гармонических воздействиях
При гармонических воздействиях качество системы принято оценивать по амплитудо-фазовой, амплитудо-частотной и логарифмическим частотным характеристикам.
Для оценки качества переходных процессов системы можно использовать следующие величины: показатель колебательности М, резонансная (собственная частота)  , полоса пропускания системы
, полоса пропускания системы  , частота среза
, частота среза  , запасы устойчивости по модулю и по фазе.
, запасы устойчивости по модулю и по фазе.
Показатель колебательности М – это отношение максимального значения АЧХ  замкнутой системы к ее значению при
замкнутой системы к ее значению при
при  .
.
Показатель колебательности характеризует склонность системы к колебаниям. Чем выше М, тем менее качественная система при прочих равных условиях.
Частоту  , при которой АЧХ замкнутой системы имеет максимум, называют резонансной частотой системы, т.е. на этой частоте гармонические колебания проходят через систему с наименьшим усилием.
, при которой АЧХ замкнутой системы имеет максимум, называют резонансной частотой системы, т.е. на этой частоте гармонические колебания проходят через систему с наименьшим усилием.
Полоса пропускания системы – это интервал частот от до  , при котором выполняется условие:
, при котором выполняется условие:
 ,
,
или при  величина
величина  . Полоса пропускания не должна быть слишком широкой, иначе система будет воспроизводить высокочастотные помехи.
. Полоса пропускания не должна быть слишком широкой, иначе система будет воспроизводить высокочастотные помехи.
Частота среза  — частота, при которой АЧХ системы принимает значение равное 1, т.е.
— частота, при которой АЧХ системы принимает значение равное 1, т.е.  . Эта частота косвенно характеризует длительность переходного процесса. Чем меньше частота среза, тем хуже быстродействие системы
. Эта частота косвенно характеризует длительность переходного процесса. Чем меньше частота среза, тем хуже быстродействие системы
 ,
,
если переходный процесс имеет одно-два колебания, то время достижения переходной характеристикой первого максимума

Склонность системы к колебаниям характеризуется величинами ее запасов устойчивости по модулю и по фазе. Запасы устойчивости рассчитывают по АФЧХ и ЛЧХ. В хорошо демпфированных системах запас устойчивости по амплитуде колеблется в пределах от 6 до 20 дБ, а запас по фазе – от 30 до 60º.
Т.к. рассмотренные выше показатели косвенно определяют быстродействие, перерегулирование и т.п., то они могут быть использованы и для расчета систем, находящихся под воздействием непериодических возмущений.
Типовые передаточные функции и характеристическое уравнение
Для описания системы вводят передаточные функции, связывающие определенные входы и выходы.
1. Передаточная функция разомкнутой системы определяется как произведение всех передаточных функций по основному контуру. Она единственная и не зависит от точки размыкания:

2. Передаточная функция замкнутой системы по задающему воздействию определяется как отношение изображения выходной координаты (в данном случае – скорости вращения двигателя) к изображению задающего воздействия:

3. Передаточная функция замкнутой системы по возмущающему воздействию определяется как отношение изображения выходной координаты к изображению возмущающего воздействия (в данном случае – момента нагрузки):

Стандартная схема системы
В целях унификации вводится стандартная структурная схема системы с единичной обратной связью, стандартными обозначениями входов и выходов и типовых передаточных функций.

Рисунок 7.2. стандартная схема системы
1. Передаточная функция разомкнутой системы:

 и
и  состоят из сомножителей не выше второго порядка.
состоят из сомножителей не выше второго порядка.
 – характеристическое уравнение разомкнутой системы, его корни определяют свойства разомкнутой системы.
– характеристическое уравнение разомкнутой системы, его корни определяют свойства разомкнутой системы.
2. Передаточная функция по задающему воздействию:

Приравниваем знаменатель к нулю, получаем характеристическое уравнение замкнутой системы.

 – характеристическое уравнение замкнутой системы, его корни определяют свойства замкнутой системы.
– характеристическое уравнение замкнутой системы, его корни определяют свойства замкнутой системы.
3. Передаточная функция по возмущению:

4. Передаточная функция по ошибке:

Понятие устойчивости
Очень важно изучить поведение системы во времени. В некоторых случаях процессы оказываются расходящимися, что свидетельствует о неустойчивости системы.
Для нормальной эксплуатации система должна быть устойчивой, т.е. после действия возмущения она должна возвращаться в состояние равновесия.
В качестве примера рассмотрим поведение шарика на вогнутой поверхности (желоб), выпуклой поверхности и плоской поверхности.
Устойчивая система (вогнутая поверхность), процесс сходится:
Неустойчивая система (выпуклая поверхность), процесс расходится:
Нейтральная система (горизонтальная поверхность), координата (процесс) остается постоянной.
Эти примеры являются механической аналогией понятия устойчивости. Рассмотрим математическое определение понятия устойчивости.
Система описывается дифференциальным уравнением:

 – решение дифференциального уравнения.
– решение дифференциального уравнения.
 –однородное уравнение определяет свободную составляющую решения
–однородное уравнение определяет свободную составляющую решения  .
.

 – корни характеристического уравнения.
– корни характеристического уравнения.
 – частное решение неоднородного дифференциального уравнения, определяется видом внешней функции;
– частное решение неоднородного дифференциального уравнения, определяется видом внешней функции;
 – постоянные коэффициенты, определяются из начальных условий и полного (общего) решения.
– постоянные коэффициенты, определяются из начальных условий и полного (общего) решения.
Строго устойчивость определяется в смысле Ляпунова. Для линейных систем с постоянными параметрами считается, что система устойчива, если предел свободной составляющей равен 0
 .
.
Устойчивость — внутреннее свойство системы, присущее ей вне зависимости от действующих на нее сигналов, поэтому рассматривается только свободная составляющая.
Это есть определение асимптотической устойчивости.
Свяжем требование устойчивости с расположением корней характеристического уравнения:
 ,
,
 — корни , i=1,2,…,n,
— корни , i=1,2,…,n,
вещественные обозначим  ,
,
комплексные –  .
.
Рассмотрим свободные составляющие соответствующие различным корням.
1. Корень вещественный, положительный: 


2. Корень вещественный, отрицательный: 
 +j
+j

3. Корни комплексные, сопряженные, с положительной вещественной частью: 



 система неустойчива
система неустойчива
4. Корни комплексные, сопряженные, с отрицательной вещественной частью: 

 система устойчива.
система устойчива.
Условием устойчивости является расположение корней характеристического уравнения в левой полуплоскости.
Система на границе устойчивости, если корни на мнимой оси.
Устойчивость – необходимое условие функционирования системы, поэтому в курсе уделяется много внимания методам оценки устойчивости системы.
источники:
http://feklistovstudio.narod.ru/12.htm
http://megaobuchalka.ru/12/9337.html