Содержание
Кривизна и кручение. Натуральные уравнения кривой
Краткие теоретические сведения
Кривизна кривой
Кривизной $k$ кривой в данной точке называют модуль скорости вращения касательной по отношению к длине дуги.
Регулярная дважды дифференцируемая без особых точек кривая $gamma$, заданная векторной функцией $vec{r}=vec{r}(t)$, имеет в каждой точке определенную кривизну, причем
$$
|k(t)|=frac{|vec{r’}(t)times vec{r»}(t)|}{|vec{r'(t)}|^3}.
$$
Для кривой, заданной параметрически
$$ x=x(t), ,, y=y(t), ,, z=z(t), $$
кривизна в точке $P(t=t_0)$ находится по формуле:
$$
k^2(t_0)=frac{left| begin{array}{cc}
y’ & z’ \
y»& z» \
end{array}
right|^2+left| begin{array}{cc}
z’ & x’ \
z»& x» \
end{array}
right|^2+left| begin{array}{cc}
x’ & y’ \
x» & y» \
end{array}
right|^2}{Bigl((x’)^2+(y’)^2+(z’)^2Bigr)^3},
$$
где все производные вычисляются при $t=t_0$.
Если кривая задана естественной параметризацией $vec{r}=vec{r}(s)$, то векторы $vec{r’}(s)$ и $vec{r»}(s)$ перпендикулярны, причем $|vec{r’}(s)|=1$. Тогда выражение для кривизны принимает вид:
$$
k(s)= |vec{r»}(s)|.
$$
?
Что вы скажете о кривой, которая в каждой свой точке имеет нулевую кривизну?
Для плоской кривой, лежащей в плоскости $(xy)$, кривизну можно найти по формулам:
$$
begin{array}{rl}
x=x(t), y=y(t):& k = displaystylefrac{|x’y»-x»y’|}{left((x’)^2+(y’)^2right)^{3/2}}, \
y=y(x):& k = displaystylefrac{|y»|}{left(1+(y’)^2right)^{3/2}}, \
rho=rho(varphi):& k = displaystylefrac{|rho^2+2(rho’)^2-rhorho»|}{left(rho^2+(rho’)^2right)^{3/2}}.\
end{array}
$$
Кручение
Абсолютным кручением $varkappa$ кривой называют скорость вращения соприкасающейся плоскости вокруг касательной.
$$
|varkappa (t)|=frac{|(vec{r’}(t), vec{r»}(t), vec{r»’}(t))|}{|vec{r’}(t)times vec{r»}(t)|^2}.
$$
В случае естественной параметризации
$$
|varkappa(s)|=frac{|(vec{r’}(s), vec{r»}(s), vec{r»’}(s))|}{k^2(s)}
$$
Для плоской кривой кручение равно нулю: $varkappa=0$!
Натуральные уравнения кривой
Если кривая задана естественной параметризацией $vec{r}=vec{r}(s)$, то кривизна и кручение будут являться функциями длины дуги
$$
k=k(s), quad varkappa=varkappa(s).
$$
Система этих двух соотношений называется натуральными уравнениями кривой.
Натуральные уравнения полностью определяют форму кривой, ибо связывают инварианты, которые не меняются при преобразовании координат (при изменении положения указанной кривой в пространстве относительно системы координат).
Решение задач
Задача 1 (Феденко №351)
Найдите кривизну кривой:
$$
x=a,mbox{cos}^3t,,,y=a,mbox{sin}^3t.
$$
Задача 2 (Феденко №380)
Найдите параболу $y=ax^2+bx+c$, имеющую с синусоидой $y=mbox{sin}x$ в точке $A(pi/2,1)$ общие касательную и кривизну.
Задача 3 (Феденко №405)
Составьте натуральные уравнения кривой:
$$
x=a(mbox{cos},t+t,mbox{sin},t), ,, y=a(mbox{sin},t-t,mbox{cos},t).
$$
Краткое решение задачи 3
$$
s=frac{at^2}{2}.
$$
$$
k=frac{1}{at}.
$$
$$
t=frac{1}{ak} Rightarrow s= frac{1}{2ak^2}.
$$
Натуральные уравнения:
$$
k=frac{1}{at},,,s=frac{at^2}{2}
$$
или
$$
k^2=frac{1}{2as}.
$$
Феденко записывает ответы через радиус кривизны:
$R=frac{1}{k}$.
Задача 4 (Феденко №486, №514)
Найдите кривизну и кручение, составьте натуральные уравнения кривой:
$$
x=a,mbox{ch}t, , y=a,mbox{sh}t, , z=a, t.
$$
Решение задачи 4
Задачу можно решать двумя способами:
1 способ. Найти $k(t), varkappa(t), s(t)$.
2 способ. Сначала найти выразить $t$ через $s$ и записать естественную параметризацию кривой $vec{r}=vec{r}(s)$. А далее найти $k(s)$ и $varkappa(s)$.
Воспользуемся первым способом.
begin{gather*}
vec{r}(t_0)={a,mbox{ch}t, , a,mbox{sh}t, , at},\
vec{r’}(t_0)={a,mbox{sh}t, , a,mbox{ch}t, , a},\
vec{r»}(t_0)={a,mbox{ch}t, , a,mbox{sh}t, , 0}\
vec{r»’}(t_0)={a,mbox{sh}t, , a,mbox{ch}t, , 0}.
end{gather*}
$$
Rightarrow quad k^2(t) = frac{1}{4a^2mbox{ch}^4t}.
$$
$$
Rightarrow quad k(t) = frac{1}{2a,mbox{ch}^2t}.
$$
begin{equation*}
varkappa(t) = frac{ left|
begin{array}{ccc}
a,mbox{sh}t & a,mbox{ch}t & a \
a,mbox{ch}t & a,mbox{sh}t & 0 \
a,mbox{sh}t & a,mbox{ch}t & 0 \
end{array}
right|}{a^4cdot 2mbox{ch}^2t} = frac{1}{2a,mbox{ch}^2t}.
end{equation*}
В задаче №473 была та же кривая и мы получили, что
$$s=asqrt{2},mbox{sh},t.$$
Используя тождества для гиперболических функций, выразим $t$ через $s$ и подставим их в выражения для кривизны и кручения:
begin{equation*}
s=asqrt{2},mbox{sh}t=asqrt{2},sqrt{mbox{ch}^2t-1} ,, Rightarrow ,, mbox{ch}^2t=frac{s^2}{2a^2}+1 ,, Rightarrow
end{equation*}
begin{equation*}
k(s)=varkappa(s)=frac{1}{2a,mbox{ch}^2t} = frac{a}{s^2+2a^2}.
end{equation*}
Вычисления сделаны для $a>0$.
Задача 5 (Феденко №496)
Найдите функцию $f(t)$, для которой данная кривая — плоская:
$$
vec{r}(t)={a,mbox{cos}t, , a,mbox{sin}t, , f(t)}
$$
Решение задачи 5
$$
begin{array}{lll}
x=a,mbox{cos}t,, &y=a,mbox{sin}t, , &z=f(t),\
x’=-a,mbox{sin}t, , &y’=a,mbox{cos}t, , &z’=f'(t),\
x»=-a,mbox{cos}t, , &y»=-a,mbox{sin}t, , &z»=f»(t),\
x»’=a,mbox{sin}t, , &y»’=-a,mbox{cos}t, , &z»’=f»'(t).
end{array}
$$
Для плоской кривой кручение равно нулю:
begin{equation*}
varkappa(t) = left|
begin{array}{rrr}
-a,mbox{sin}t & a,mbox{cos}t & f'(t) \
-a,mbox{cos}t & -a,mbox{sin}t & f»(t) \
a,mbox{sin}t & -a,mbox{cos}t & f»'(t) \
end{array}
right| = left( f'(t) + f»'(t) right)cdot2a^2=0.
end{equation*}
begin{equation*}
f'(t)=-f»'(t) quad Rightarrow quad f(t)=c_1+c_2,mbox{sin}t+c_3,mbox{cos}t.
end{equation*}
?
Как найти уравнение плоскости, в которой лежит кривая?
Известно, что плоская кривая лежит в своей соприкасающейся плоскости!
Второй способ — составить уравнение плоскости по трем точкам.
Лекция 3
Формулы Френе.
Кривизна и кручение кривой в произвольной
параметризации. Винтовая линия.
Р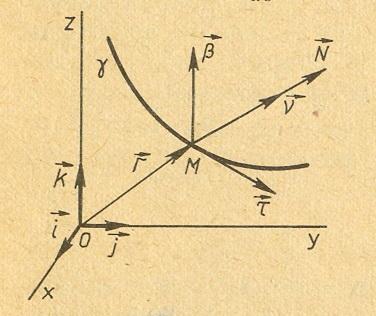 ассмотрим
ассмотрим
векторы
![]()
гладкой линии
![]()
заданной естественной параметризацией
![]() .
.
1). Так как
![]() то
то
![]() (1)
(1)
2). Вектор
![]()
– единичный вектор гладкой нормали
![]()
параллелен
спрямляющей плоскости
![]()
3).
![]() .
.
В (1) заменяем
![]()
и
![]()
по формулам (3) и (2). Получим
![]()
Подставим выражение
![]()
в (2).
![]()
4).
![]() .
.
Дифференцируем по s:
![]()
=
![]() .
.
Заменим
![]()
и
![]()
их выражениями по (3) и (4):
![]()
![]()
Формулы (3),(4),(5)
называются формулами Френе, которые
рассматривают связь между базисными
векторами сопровождающими треугольниками,
кручением и кривизной линии.
Определение 3.1.
Число
![]()
называется кручением линии
![]()
в точке М
на всей линии
![]() .
.
Кручение есть функция параметра S.
Исходя из (5) и так
как
![]() —
—
единичный вектор, то
![]() .
.
Кручение больше 0 тогда и только тогда,
когда
![]() и
и
![]()
противоположно направлены.
Геометрический
смысл кручения.
Модуль кручения
в данной точке кривой есть скорость
изменения направления функции b(S)
по отношению к естественному параметру
S.
Так как вектор b=b(S)
перпендикулярен соприкасающейся
плоскости, то абсолютная величина
кручения характеризует скорость
изменения положения соприкасающейся
плоскости по отношению к параметру S.
Если линия задана
в естественной параметризации, то
кривизна и кручение есть функция по
параметру S:
![]()
![]() .Уравнения
.Уравнения
такого вида называются натуральными
уравнениями кривой и характеризуют
кривую с точностью до движения, так как
если у двух кривых натуральные уравнение
совпадают, то кривые отличны только
положением в пространстве. Если у двух
кривых натуральные уравнения совпадают,
то на каждой из них существует естественная
параметризация, такая что в точках с
одинаковыми параметрами кривизна и
кручение одинаковы.
Вычислительная
формула для кручения линии заданной в
естественной параметризации.
![]() —
—
продифференцируем
это равенство. Используем (5).
![]()
В
ыразим смешанное произведение
векторов производных:
![]()
![]() формула
формула
кручения (6)
Определение 3.2.
Линия называется плоской, если все её
точки принадлежат некоторой плоскости
![]() .
.
Если во всех точках
гладкой плоской линии кручение равно
нулю.
Произвольная
параметризация.
Пусть кривая
![]()
задана произвольной параметризацией
своими параметрическими уравнениями:
![]()
Рассмотрим возможную
замену параметра t
на s,
причем функция s=h(t)
является допустимой заменой параметра
![]() -1
-1![]()
![]()
![]() :
:
![]() -1
-1
![]()
Найдем
![]()

![]() Вектор
Вектор
второй производной
![]() параллелен
параллелен
соприкасающейся плоскости, так как он
выражен через вектор
![]()
и
![]() .
.
Рассмотрим векторное
произведение первой и второй производной.

Винтовая линия
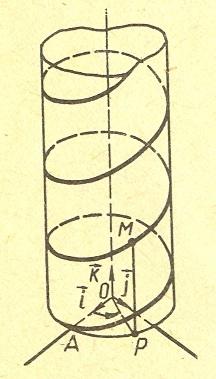 Винтовая
Винтовая
линия получена путем равномерного
вращения М
(х,у,z)
![]()
около оси Оz
и равномерного движения параллельно
оси Оz.
Является гладкой линией класса
![]() .
.
Параметрические
уравнения винтовой линии:
![]()
Направляющая винтовой линии совпадает
с направляющей кругового цилиндра (ОХУ:
![]() ,
,
значит, винтовая линия лежит на прямом
круговом цилиндре с осью Оz.
Векторное уравнение
винтовой линии:
![]() .
.
Используя формулу
![]() ,
,
имеем:
![]() .
.
Таким образом,
![]() .
.
Через М![]()
проходит прямолинейная образующая МР
цилиндра, имеющая направляющий вектор
![]()
Так как
![]() ,
,
то винтовая линия пересекает все
образующие под постоянным углом (углом
между кривой и прямой называется угол
между касательной к этой кривой и данной
прямой).
Длина дуги винтовой
линии равна
![]() .
.
Вектор главной
нормали:
![]()
Так как
![]()
(по формуле Френе), то
![]()
(k
– кривизна винтовой линии).
Главная нормаль
винтовой линии в точке М
есть
перпендикуляр к оси цилиндра, проведенный
через точку М,
т.к.
![]()
где Р
– проекция М
на ОХУ.
Вектор главной нормали направлен
противоположно вектору
![]()
Кручение винтовой
линии:
![]() .
.
Знак кручения совпадает со знаком числа
b.
Винтовая линия
является частным случаем достаточно
широкого класса линий, называемых
кривыми Бертрана. Гладкая линия
![]()
называется кривой Бертрана, если для
нее существует другая гладкая линия
![]()
и такое отображение
![]() ,
,
что в каждой паре соответствующих точек
линии
![]()
и
![]()
имеют общую главную нормаль.
Соседние файлы в папке вопрос 14
- #
- #
- #
From Wikipedia, the free encyclopedia
In the differential geometry of curves in three dimensions, the torsion of a curve measures how sharply it is twisting out of the osculating plane. Taken together, the curvature and the torsion of a space curve are analogous to the curvature of a plane curve. For example, they are coefficients in the system of differential equations for the Frenet frame given by the Frenet–Serret formulas.
Definition[edit]

Animation of the torsion and the corresponding rotation of the binormal vector.
Let r be a space curve parametrized by arc length s and with the unit tangent vector T. If the curvature κ of r at a certain point is not zero then the principal normal vector and the binormal vector at that point are the unit vectors

respectively, where the prime denotes the derivative of the vector with respect to the parameter s. The torsion τ measures the speed of rotation of the binormal vector at the given point. It is found from the equation

which means

As  , this is equivalent to
, this is equivalent to  .
.
Remark: The derivative of the binormal vector is perpendicular to both the binormal and the tangent, hence it has to be proportional to the principal normal vector. The negative sign is simply a matter of convention: it is a byproduct of the historical development of the subject.
Geometric relevance: The torsion τ(s) measures the turnaround of the binormal vector. The larger the torsion is, the faster the binormal vector rotates around the axis given by the tangent vector (see graphical illustrations). In the animated figure the rotation of the binormal vector is clearly visible at the peaks of the torsion function.
Properties[edit]
- A plane curve with non-vanishing curvature has zero torsion at all points. Conversely, if the torsion of a regular curve with non-vanishing curvature is identically zero, then this curve belongs to a fixed plane.
- The curvature and the torsion of a helix are constant. Conversely, any space curve whose curvature and torsion are both constant and non-zero is a helix. The torsion is positive for a right-handed[1] helix and is negative for a left-handed one.
Alternative description[edit]
Let r = r(t) be the parametric equation of a space curve. Assume that this is a regular parametrization and that the curvature of the curve does not vanish. Analytically, r(t) is a three times differentiable function of t with values in R3 and the vectors

are linearly independent.
Then the torsion can be computed from the following formula:

Here the primes denote the derivatives with respect to t and the cross denotes the cross product. For r = (x, y, z), the formula in components is

Notes[edit]
- ^ Weisstein, Eric W. «Torsion». mathworld.wolfram.com.
References[edit]
- Pressley, Andrew (2001), Elementary Differential Geometry, Springer Undergraduate Mathematics Series, Springer-Verlag, ISBN 1-85233-152-6
![]()
Выведем формулы для вычисления кривизны и кручения кривой ![]() , заданной в декартовых координатах.
, заданной в декартовых координатах.
Теорема 1. В каждой точке регулярной кривой класса ![]() кривизна определена и неотрицательна. Если
кривизна определена и неотрицательна. Если ![]() – натуральная параметризация, то
– натуральная параметризация, то ![]() . Если
. Если ![]() – произвольная регулярная параметризация, то
– произвольная регулярная параметризация, то ![]() .
.
Первое утверждение теоремы следует из уравнения ![]() сопровождающего репера Френе, если его возвести в квадрат и воспользоваться тем, что
сопровождающего репера Френе, если его возвести в квадрат и воспользоваться тем, что ![]() и
и ![]() .
.
Пусть кривая имеет произвольную регулярную параметризацию ![]() Выразим
Выразим ![]() через производные по
через производные по ![]() :
: ![]() , но
, но ![]() . Поэтому
. Поэтому ![]() . Продифференцируем это равенство по
. Продифференцируем это равенство по ![]() :
:  и возведем в квадрат. Поскольку
и возведем в квадрат. Поскольку ![]() и
и ![]() , то
, то  , ч. т.д.
, ч. т.д.
Если кривая плоская ![]() , то формула для кривизны примет вид
, то формула для кривизны примет вид ![]() . Если плоская кривая задана уравнением
. Если плоская кривая задана уравнением ![]() , то ее кривизна вычисляется по формуле
, то ее кривизна вычисляется по формуле ![]() .
.
Если на некотором интервале ![]() кривизна кривой равна нулю, то в натуральной параметризации
кривизна кривой равна нулю, то в натуральной параметризации ![]() и, значит,
и, значит, ![]() , где
, где ![]() – некоторые постоянные векторы из
– некоторые постоянные векторы из ![]() и кривая представляет собой отрезок прямой в пространстве.
и кривая представляет собой отрезок прямой в пространстве.
Кривизна допускает следующую геометрическую интерпретацию: пусть ![]() и
и ![]() – близкие точки регулярной кривой, обозначим через
– близкие точки регулярной кривой, обозначим через ![]() угол между касательными в этих точках, а через
угол между касательными в этих точках, а через ![]() – длину дуги кривой от точки
– длину дуги кривой от точки ![]() до точки
до точки ![]() . Тогда кривизна регулярной кривой в точке
. Тогда кривизна регулярной кривой в точке ![]() может быть вычислена по формуле
может быть вычислена по формуле ![]() . Действительно, если обозначить единичные касательные векторы в точках через
. Действительно, если обозначить единичные касательные векторы в точках через ![]() и
и![]() , то поскольку
, то поскольку ![]() , то
, то  =
=![]()
Теорема 2. В каждой точке регулярной класса ![]() кривой в
кривой в ![]() , в которой кривизна
, в которой кривизна ![]() , определено кручение кривой. Если
, определено кручение кривой. Если ![]() – натуральная параметризация, то
– натуральная параметризация, то ![]() . Если
. Если ![]() – произвольная параметризация, то
– произвольная параметризация, то ![]() .
.
Если кривая задана в натуральной параметризации, то из последнего уравнения сопровождающего репера Френе находим:  Здесь мы воспользовались тем, что, если
Здесь мы воспользовались тем, что, если ![]() , то вектор главной нормали
, то вектор главной нормали ![]() и вычислили его производную.
и вычислили его производную.
Если теперь кривая взята в произвольной параметризации ![]() , то имеем следующие формулы
, то имеем следующие формулы  . Подставляя их в полученную формулу для кручения (в случае натуральной параметризации) получим,
. Подставляя их в полученную формулу для кручения (в случае натуральной параметризации) получим, ![]() . Воспользуемся, наконец, тем, что
. Воспользуемся, наконец, тем, что ![]() и формулой для кривизны в случае произвольной параметризации и получим нужную формулу для кручения.
и формулой для кривизны в случае произвольной параметризации и получим нужную формулу для кручения.
Покажем, что если кручение некоторой пространственной кривой на интервале ![]() равно нулю, то кривая плоская. Действительно, если воспользоваться натуральной параметризацией, то
равно нулю, то кривая плоская. Действительно, если воспользоваться натуральной параметризацией, то ![]() , следовательно, бинормаль
, следовательно, бинормаль ![]() . Поскольку
. Поскольку ![]() , то
, то ![]() . Интегрируем и получаем, что
. Интегрируем и получаем, что ![]() , что и означает, что кривая, когда натуральный параметр принадлежит интервалу
, что и означает, что кривая, когда натуральный параметр принадлежит интервалу ![]() , находится в плоскости перпендикулярной постоянному вектору
, находится в плоскости перпендикулярной постоянному вектору ![]() .
.
Две функции ![]() (где
(где ![]() – дуга некоторой кривой в
– дуга некоторой кривой в ![]() ) называются натуральными уравнениями кривой. Их задание позволяет найти кривую с точностью до движения в
) называются натуральными уравнениями кривой. Их задание позволяет найти кривую с точностью до движения в ![]() .
.
Пример. Найдем все кривые в ![]() с натуральными уравнениями
с натуральными уравнениями ![]() Возьмем некоторую точку кривой с данными натуральными уравнениями. Можем считать, что точке отвечает значение дуги
Возьмем некоторую точку кривой с данными натуральными уравнениями. Можем считать, что точке отвечает значение дуги ![]() . Поскольку
. Поскольку ![]() , то кривая плоская и можно выбрать координаты в
, то кривая плоская и можно выбрать координаты в ![]() так, чтобы бинормаль
так, чтобы бинормаль ![]() . Тогда формулы Френе
. Тогда формулы Френе  можно записать как дифференциальное уравнение для двумерного вектора
можно записать как дифференциальное уравнение для двумерного вектора ![]() :
: 
![]() . Поскольку матрица
. Поскольку матрица ![]() не зависит от
не зависит от ![]() , то решение имеет вид
, то решение имеет вид ![]() . Нетрудно проверить, что
. Нетрудно проверить, что  . Отсюда получаем, что
. Отсюда получаем, что ![]() . Далее интегрируем это уравнение и находим кривую
. Далее интегрируем это уравнение и находим кривую ![]() . Если выбрать базис в плоскости
. Если выбрать базис в плоскости ![]() следующим образом
следующим образом ![]() , то уравнения кривой запишутся в виде
, то уравнения кривой запишутся в виде  . Очевидно, что это есть окружность радиуса
. Очевидно, что это есть окружность радиуса ![]() .
.
Задача. Покажите тем же методом, что кривая в ![]() , у которой
, у которой ![]() и
и ![]() есть винтовая линия.
есть винтовая линия.
Литература. 1. А. В. Погорелов, гл. 3. 2. О. А. Борисенко, гл. 1.
| < Предыдущая | Следующая > |
|---|