В данной статье описывается расчет угла бокового сноса ветром в зависимости от скорости и направления ветра, вводится понятие навигационного треугольника скоростей.
Термины и определения
 Истинная (воздушная) скорость – это скорость движения воздушного судна относительно воздушной массы, в которой проходит полет.
Истинная (воздушная) скорость – это скорость движения воздушного судна относительно воздушной массы, в которой проходит полет.
Путевая скорость – скорость воздушного судна относительно земли.
Магнитный курс (МК, heading) – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета и продольной осью воздушного судна.
Магнитный путевой угол (МПУ, track) – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета, и линией пути.
Навигационный ветер (НВ) – угол между северным направлением меридиана, принятого за начало отсчета и направлением, куда дует ветер.
Метеорологический ветер – угол между северным направлением меридиана, принятого за начало отсчета и направлением, откуда дует ветер.
Угол сноса (УС) – угол, заключенный между продольной осью самолета и линией пути. Отсчитывается от продольной оси самолета до линии пути вправо со знаком плюс и влево со знаком минус.
Курсовой угол ветра (КУВ) – угол, заключенный между линией пути (фактической или заданной) и направлением навигационного ветра. Отсчитывается от линии пути до направления ветра по ходу часовой стрелки от 0 до 360°.
Навигационный треугольник скоростей
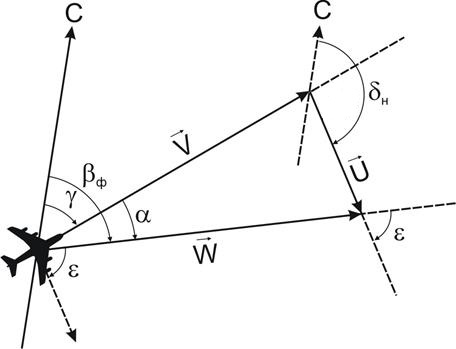
α – угол сноса
βф – МПУ
δн – навигационный ветер
ε – курсовой угол ветра
γ – магнитный курс
V – воздушная скорость
W – путевая скорость
U – скорость ветра
Самолет относительно воздушной массы перемещается с воздушной скоростью в направлении своей продольной оси. Одновременно под действием ветра он перемещается вместе с воздушной массой в направлении и со скоростью ее движения. В результате движение самолета относительно земной поверхности будет происходить по равнодействующей, построенной на слагаемых скоростях самолета и ветра. Таким образом, при полете с боковым ветром векторы воздушной скорости, путевой скорости и скорости ветра образуют треугольник, который называется навигационным треугольником скоростей. Каждый вектор характеризуется направлением и величиной.
Расчеты
Между элементами навигационного треугольника скоростей существует следующая зависимость:
γ = β – (±α)
β = γ + (±α)
α = β – γ
W = V(соs(α)) + U(соs(ε))
ε = δм ± 180° – β
δм = β + ε ± 180°
При расчетах необходимо учитывать, что все величины необходимо привести к единому измерению. Например, скорости ветра и истинную воздушную скорость необходимо выразить в в узлах или метрах в секунду.
Расчет в уме
Для простоты расчета используется методика максимального угла сноса. Для этого рассчитывается максимальный возможный угол сноса для текущего ветра, а потом вносится поправка на угол ветра.
Максимальный угол сноса равен:
αmax ≈ (60 * U) / V
Максимальный угол сноса – это такой УС, при котором ветер был бы строго боковой (90 градусов относительно магнитного курса).
Пример: скорость ветра 15 узлов, истинная воздушная скорость 450 узлов. По формуле находим:
(60*15)/450=2
2 градуса – максимальный угол сноса.
Если ветер не строго боковой, то полученный результат умножаем на коэффициент, зависящий от курсового угла ветра (КУВ), равный синусу КУВ:
| КУВ | Коэффициент |
|---|---|
| 60° | 0,8 |
| 45° | 0,7 |
| 30° | 0,5 |
| 0 | 0° |
Примечания:
- Знак для значения угла сноса определяется исходя из направления ветра. Если ветер дует в правый борт, то знак “минус”, если в левый – “плюс”.
- Для следования по ЛЗП необходимо внести поправку в курс, равную УС, но противоположную по знаку
- Скорости U и V должны быть в одной размерности
- Приборная скорость не равна истинной
- М/с, для расчётов в уме, можно переводить в узлы простым умножением на 2
Пример:
Найти угол сноса, если МПУ 130°, навигационный ветер на данной высоте 190°, 7м/с. Истинная скорость 220 узлов.
Решение:
1) Приводим значения к единой системе счисления:
МПУ=130°;
Ветер 190°;
Скорость ветра 7 м/с = 14 узлов;
Vист = 220 узлов.
2) Находим курсовой угол ветра:
КУВ=НВ-МПУ=190°-130°=60°
3) Находим максимальный угол сноса:
УСmax=(60*14)/220=4°
4) Определяем коэффициент:
К=sin(КУВ)=sin(60°)=0,8
5) Получаем угол сноса
УС=УСmax*K=(+)4°*0,8=3°
Ответ: для поправки на ветер необходимо взять 3 градуса влево. МК=127°.
Ветер
– горизонтальное движение воздуха
относительно земной поверхности,
характеризующееся скоростью и
направлением, которые меняются с течением
времени, изменением места и высоты.
Ветер
навигационный и метеорологический
С
увеличением высоты в большинстве случаев
скорость ветра увеличивается, а
направление изменяется. На больших
высотах, на которых выполняются
полеты самолетов с ГТД, скорость ветра
может достигать 200— 300 км/ч
и
более. Для обеспечения точного
самолетовождения необходимо
учитывать влияние ветра на полет
самолета. В полете ветер определяется
штурманом или пилотом путем соответствующих
промеров и расчетов. Существует два
понятия о направлении ветра: навигационное
и метеорологическое.
Навигационным
направлением ветра (НВ) называется
угол, заключенный между северным
направлением магнитного меридиана и
направлением в точку, куда дует ветер.
Отсчитывается он от северного
направления магнитного меридиана по
часовой стрелке от 0 до 360° (рис. 8.1).
Метеорологическим
направлением ветра (δ) называется
угол, заключенный между северным
направлением меридиана и направлением
из точки, откуда дует ветер. Обычно на
метеостанции отсчитывают
метеорологическое направление ветра
относительно северного направления
истинного меридиана, т. е. угол δи.
В
целях упрощения расчетов экипажам,
производящим взлет и посадку, сообщается
метеорологическое направление ветра
у Земли, отсчитанное относительно
магнитного меридиана, т. е. на метеостанции
вводят поправку на магнитное склонение,
если оно более 10°.
Направление
ветра на высотах полета, отсчитанное
от истинного меридиана, летный состав
самостоятельно переводит в направление
ветра, отсчитанное относительно
магнитного меридиана. Метеорологическое
направление ветра:
δ
= δи-(±Δм)
Магнитное
склонение Δм
берется
для района расположения метеостанции.
В
штурманских расчетах используется
навигационное направление ветра,
или так называемый навигационный ветер.
Перевод метеорологического направления
ветра в навигационное и обратно
выполняется по формулам:
НВ
= δ ± 180°; δ = НВ ± 180°.
Знак
плюс берется, если δ или НВ меньше 180°,
а знак минус — если δ или НВ больше
180°.
Скоростью
ветра U
называется
скорость движения воздушных масс
относительно земной поверхности.
Скорость ветра измеряется в километрах
в час или в метрах в секунду. Чтобы
перейти от одних единиц измерения к
другим, например от метров в секунду
к километрам в час, необходимо скорость
ветра в метрах в секунду умножить на
3,6, т. е.:
U
км/ч = U
м/сек·3,6
Перевод
скорости ветра, выраженной в метрах в
секунду, в скорость, выраженную в
километрах в час, можно осуществлять
подсчетом в уме по упрощенной формуле:
U
км/ч = U
м/сек · 4

![]()
Рис.
8.2 Ключи для перевода м/с в км/час и
обратно на НЛ-10м
Угол
ветра
– угол, заключённый между линией пути
и направлением навигационного ветра;
отсчитывается по часовой стрелке от 0
до 360º.
Курсовой
угол —
понятие навигации,
обозначающее угол между диаметральной
плоскостью судна и
направлением на какой-либо наблюдаемый
с судна объект. Курсовой угол измеряется
в градусах, отсчитываемых на азимутальном
круге от 0 до 180° в сторону правого или
левого борта от направления в нос.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
 В первую очередь необходимо определиться, что такое ветер. Ветер – это перемещение воздушных масс из одной точки в другую. Как известно, любое воздушное судно перемещается внутри воздушной массы. А что если воздушная масса, в которой проходит полет, также перемещается относительно земли? Помимо движения с собственной скоростью относительно воздушной массы, самолет будет перемещаться еще и со скоростью движения этой воздушной массы. Учитывая то, что скорость ветра на высотах может достигать значений более 200-300 км/ч, становится очевидно, что учет ветра в полете крайне важен. Несложно посчитать, что если при таком ветре (предположим строго боковом) выполнять полет по трассе в течение одного часа и при этом не учитывать ветер, то в итоге через час самолет окажется в 200-300 км в стороне от трассы. В случае же, если это ветер встречный, и экипаж не учтет его на этапе подготовки к полету, может элементарно не хватить топлива до аэродрома назначения.
В первую очередь необходимо определиться, что такое ветер. Ветер – это перемещение воздушных масс из одной точки в другую. Как известно, любое воздушное судно перемещается внутри воздушной массы. А что если воздушная масса, в которой проходит полет, также перемещается относительно земли? Помимо движения с собственной скоростью относительно воздушной массы, самолет будет перемещаться еще и со скоростью движения этой воздушной массы. Учитывая то, что скорость ветра на высотах может достигать значений более 200-300 км/ч, становится очевидно, что учет ветра в полете крайне важен. Несложно посчитать, что если при таком ветре (предположим строго боковом) выполнять полет по трассе в течение одного часа и при этом не учитывать ветер, то в итоге через час самолет окажется в 200-300 км в стороне от трассы. В случае же, если это ветер встречный, и экипаж не учтет его на этапе подготовки к полету, может элементарно не хватить топлива до аэродрома назначения.
Истинная и путевая скорость.
При учете влияния ветра на полет различают два вида скоростей: истинная воздушная скорость (обозначается Vи или по-английски TAS – true airspeed) и путевая скорость (обозначается W или по-английски GS – ground speed).
Истинная воздушная скорость – это скорость движения воздушного судна относительно воздушной массы, в которой проходит полет.
Путевая скорость – скорость воздушного судна относительно земли.
Следует запомнить, что ветер не оказывает влияния на истинную воздушную скорость. Влияние ветра сказывается только на путевой скорости.
Курс и путевой угол.
По аналогии со скоростью, при учете ветра различают два направления полета воздушного судна: курс (HDG – heading) и путевой угол (обозначается ПУ, по-английски TRK — track).
Курс – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета и продольной осью воздушного судна.
Путевой угол – это угол, заключенный между северным направлением меридиана, принятого за начало отсчета, и линией пути. Различают фактический путевой угол (ФПУ) и заданный путевой угол (ЗПУ).
Что касается отсчета направлений, в навигации применяются несколько меридианов начала отсчета: истинный, магнитный, опорный. При решении задач, связанных с учетом ветра, при условии, что все величины приведены к одному и тому же меридиану, неважно, какие направления применяются, истинные или магнитные.
Направление ветра.
В аэронавигации различают два вида ветра: навигационный (НВ) и метеорологический, их направления различаются на 180 градусов и на магнитное склонение. Дело в том, что в основном в авиации принято все расчеты выполнять от магнитного меридиана, в то время как в метеорологии гораздо удобнее пользоваться истинным направлением меридиана начала отсчета.
Навигационный ветер – угол между северным направлением меридиана, принятого за начало отсчета и направлением, куда дует ветер.
Метеорологический ветер – угол между северным направлением меридиана, принятого за начало отсчета и направлением, откуда дует ветер.
Навигационный ветер применяется исключительно как вспомогательная величина при расчетах. Метеорологическое направление ветра – та величина, к которой привык каждый из нас. Юго-западный ветер, означает, что ветер дует с Юго-запада, или если пересчитать в градусы, то получим направление 225 градусов, именно в таком виде и применяется значение направления ветра в авиации.
Навигационный треугольник скоростей.
Как известно, скорость величина векторная. Вектора воздушной скорости, ветра, и путевой скорости образуют так называемый навигационный треугольник скоростей (НТС) – основу основ аэронавигации. Применяя общие правила геометрии и тригонометрии можно вычислить все величины и углы, зная направление и величину двух векторов.
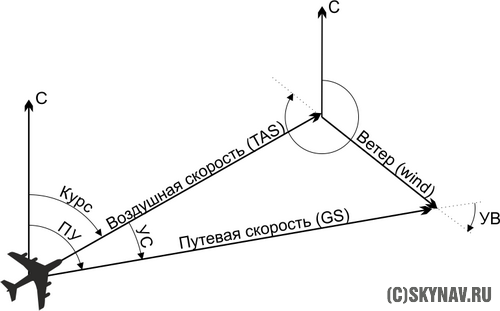
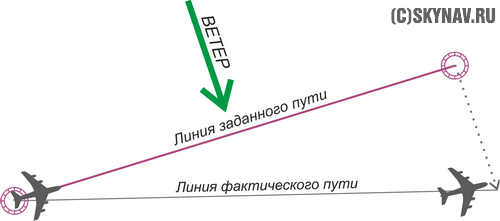
Как видно из рисунка, полет самолета проходит по определенной траектории – линии заданного пути, которая соответствует вектору путевой скорости, однако продольная ось самолета отвернута на ветер для компенсации сноса, как мы помним, продольная ось соответствует вектору воздушной скорости.
Таким образом, мы получили угол, на который нужно отвернуть на ветер, чтобы полет проходил по трассе, это и есть угол сноса – УС (по-английски WCA – wind correction angle или drift angle).
Другими словами, это угол, заключенный между векторам воздушной и путевой скоростей. Отсчитывается угол сноса всегда от вектора воздушной скорости по часовой стрелке (как в нашем случае) со знаком плюс, против часовой – со знаком минус.
Чтобы вычислить скорректированный на ветер курс полета, необходимо из путевого угла вычесть угол сноса со своим знаком.
![]()
Расчет угла сноса и путевой скорости.
Для вычисления угла сноса и путевой скорости, необходимо вычислить вспомогательную величину, которая называется угол ветра (УВ) – угол, заключенный между вектором путевой скорости и вектором ветра, то есть, это направление ветра с привязкой к направлению движения воздушного судна.
![]()
Напомним, что навигационный ветер (НВ) отличается от метеорологического на 180 градусов и, как правило, на величину магнитного склонения.
С помощью теоремы синусов получаем и формулу угла сноса:
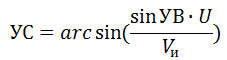
Эту формулу легко упростить, выразив угловые величины в радианах:
U – скорость ветра, Vи – истинная воздушная скорость. Для корректного расчета обе этих величины должны быть приведены к одной единице измерения, например к узлам или метрам в секунду. На практике вместо постоянного значения 57,3 применяют 60, что дает минимальную ошибку, но значительно упрощает вычисление угла сноса в уме.
Формула путевой скорости выводится методом проецирования векторов воздушной скорости и ветра на соответствующую ось и выглядит следующим образом:
![]()
При небольших значениях угла сноса можно использовать упрощенную формулу:
![]()
Если в России традиционно угол сноса принято вычислять со знаком плюс или минус, то на западе пилотов учат несколько по-другому: сам угол вычисляется как модульная величина, к которой добавляется буквы R или L, R означает, что ось самолета нужно развернуть против ветра вправо, то есть прибавить угол сноса к путевому углу, а L – наоборот влево, то есть угол сноса вычитается из путевого угла. Кроме того, вычисление угла сноса и путевой скорости в основном производится не по формулам, а с помощью механического компьютера E6B и его аналогов.
Считаем в уме.
Существует простой алгоритм вычисления угла сноса в уме.В первую очередь необходимо вычислить максимальный угол сноса при данном ветре. Как легко догадаться, максимальным он будет при боковом ветре, то есть при угле ветра в 90 градусов, а поскольку синус 90 градусов равен единице, эту часть формулы упраздняем и получаем:
Прикинув максимальное значение угла сноса, его нужно скорректировать на направление, что легко делается в уме, если знать значения синусов основных углов:
Знак же определяется исходя из направления ветра, если ветер дует в правый борт, то минус, если в левый, то плюс.
Зная косинусы основных углов легко также в уме вычислить продольную составляющую ветра, которая в свою очередь позволит вычислить путевую скорость.
Для примера рассчитаем в уме угол сноса и путевую скорость для самолета Боинг-737 при заходе на посадку, имея следующие данные:
Определяем максимальный угол сноса: 12˚, корректируем на направление ветра. Ветер встречно-боковой в правый борт под 30˚, таким образом, угол сноса равен минус 6˚, то есть необходимо довернуть вправо против ветра на 6˚. Далее рассчитываем встречную составляющую ветра: 26 узлов. Вычитаем ее из воздушной скорости, получаем путевую скорость на глиссаде 114 узлов.
ИСТИННЫЙ КУРС, ИСТИННЫЙ ПЕЛЕНГ И КУРСОВОЙ УГОЛ
Основные задачи навигации: определение направления движения судна и определение направлений на ориентиры, наблюдаемые с судна. Обычно направление движения судна определяется положением его диаметральной плоскости (ДП) относительно истинного меридиана.
Истинный курс (ИК) — угол в плоскости истинного горизонта, заключенный между нордовой (Nи) частью истинного меридиана и линией курса (рис. 9). Линия курса — линия пересечения диаметральной плоскости судна с плоскостью истинного горизонта.
Истинный курс судна измеряется углом в горизонтальной плоскости, отсчитываемым от линии истинного меридиана по часовой стрелке от 0° до 360°.
Истинный пеленг (ИП) —угол между плоскостью истинного меридиана и вертикальной плоскостью, проходящий через наблюдателя и ориентир. Линия пересечения вертикальной плоскости, проходящей через ориентир, с плоскостью истинного горизонта называется линией пеленга.
Истинный пеленг измеряется в горизонтальной плоскости от линии истинного меридиана до линии пеленга по часовой стрелке от 0° до 360°.
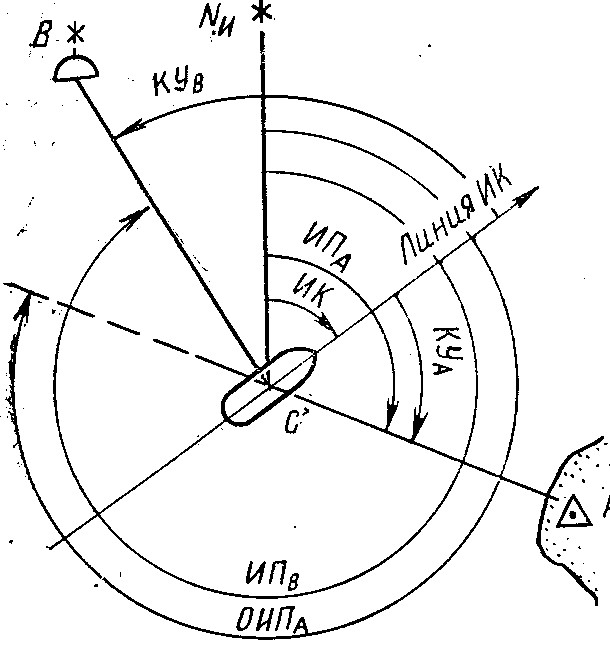
Рис. 9. Истинные направления:
С — судно; А в В — ориентиры; КУА и КУВ — соответственно курсовые углы на ориентиры А и В; ИПА и ИПВ — истинные пеленги соответственно на ориентиры А и В; ОИП — обратный истинный пеленг на ориентир А
____________________________
Угол, отличающийся от истинного пеленга на 180°, называется обратным истинным пеленгом (ОИП), т. е. ОИП=ИП±180°.
Курсовой угол (КУ) — угол, заключенный между диаметральной плоскостью судна и вертикальной плоскостью, проходящей через наблюдателя и ориентир. Курсовые углы отсчитываются от носовой части диаметральной плоскости (ДП) вправо и влево от 0° до 180°, и в зависимости от этого называются курсовыми углами правого (п/б) и левого (л/б) борта.
Если курсовой угол на ориентир составляет 90° правого или левого борта, то говорят, что ориентир находится на траверзе судна.
Условно курсовым углам правого борта приписывается знак плюс (+), а левого борта — знак минус (—).
В судовождении применяется также счет курсовых углов от носовой части диаметральной плоскости по часовой стрелке от 0° до 360°, в этом случае борт судна не указывают.
Зависимость между ИК, ИП и КУ выражается формулами:
ИП=ИК+КУ; КУ=ИП-ИК; ИК=ИП-КУ.
Указанные формулы алгебраические, и курсовой угол входит в них со своим знаком.
|
 состоит из основания, ударника, замка и паруса. Основание— сосновая рейка длиной 150 мм и сечением 10X8 мм На одном ее конце нитками с клеем привязывают скользящую петлю из скрепки и замок — П-образную пластину из алюминия шириной 8 мм. На другом конце рейки закрепляют вторую петлю. Один конец ударника, изготовленного из стальной проволоки диаметром 1,5 м .
состоит из основания, ударника, замка и паруса. Основание— сосновая рейка длиной 150 мм и сечением 10X8 мм На одном ее конце нитками с клеем привязывают скользящую петлю из скрепки и замок — П-образную пластину из алюминия шириной 8 мм. На другом конце рейки закрепляют вторую петлю. Один конец ударника, изготовленного из стальной проволоки диаметром 1,5 м .
|
||||
|