Пробник Pandora ALT-205 научился распознавать CAN и LIN шины
Часто у меня спрашивают: «Как можно распознать can шину в автомобиле?». Самый простой способ – провода can идут всегда в витой паре (скрученные между собой). Но в современных авто этих витых пар очень много бывает. Как же определить нужную нам пару?
На помощь приходит прибор от компании Алармтрейд: пробник Pandora ALT-205, про который уже упоминалось в статье «Пробник для установщиков от Pandora». С 28-го июля 2015 года на сайте alarmtrade в разделе «Сервис» можно скачать новое ПО для пробника.

Данный прибор разработан специально для облегчения установки охранных систем и доп.оборудования в автомобили. В нём уместилось множество алгоритмов работы, которые позволяют найти специфические сигналы и точки подключения, необходимые для установки автосигнализаций и другого дополнительного оборудования.

Благодаря встроенному micro USB разъёму можно с лёгкостью обновить ПО пробника, тем самым расширив его функционал.
В новую прошивку инженеры Alarm Trade добавили режим распознавания цифровых шин. Главная задача нового режима – это помощь специалисту по автоэлектрооборудованию в правильном подключении к цифровым шинам автомобиля проводами автосигнализации.

При работе в режиме распознавания цифровых шин Pandora ALT-205 может определить большинство современных can-шин со скоростями 50-500 кбит/с (с определением конкретно Can-High и Can-Low), Lin-шину, тахометрический сигнал, отличить сигнал тахометра от цифровой шины уникального формата, аудиосигнала и т.п.

В итоге, если раньше насчитывалось 4 режима работы Pandora ALT-205, то теперь этих режимов 5.
Видео определения шин CAN и LIN в автомобиле при помощи пробника Pandora ALT-205
Источник
Что такое LIN шина и как я восстанавливал стекло подъемники.

Для начала предыстория.
При покупке машины мне сказали что есть проблема со стекло подъемниками, а точнее с водительским и пультом управления на двери водителя. А по весне в одно утро выйдя к машине я обнаружил наполовину открытое задние правое стекло.
Изучив кучу статей как и кто ремонтировал стекло подъемники был составлен план действий.
1- Проверка всех разъемов в стойках
2- Проверка жгутов проводов в дверях
3- По очередное отключение исполнительных блоков для выявления неисправного.
4- Визуальный осмотр исполнительных блоков
5- Проверка шины управления LIN

Так выглядит сигнал в спокойном состояние при подаче команды добавляется еще один БИТ и его добавление выглядит как всплеск амплитуды. Проверять сигнал я решил на блоке кнопок водителя так как все вело к нему. Проверив предварительно что шина не коратит на массу я подключил осциллограф к тонкому красному проводу с синей полосой.
И увиденное меня удивило сигнал был сильно искажен дополнительными помехами но откуда они взялись? Отключаю по одному блоки управления на дверях нет изменения отключаю по одному блоки кнопок и после отключения водительского блока сигнал выравнялся.
Так истина где то рядом). разрезаю провод LIN блика кнопок водителя и подсоединяю его обратно. Смотрю что твориться по сигналу чисто с блока и понимаю что искажения идут с него.Но при этом при нажатие на клавиши в сигнале присутствуют изменения.
Причина ясна что то в блоке кнопок водителя работает не так. Для полной уверенности разобрал его и осмотрел сфоткал все элементы (микросхемы). И обнаружил что на выходе блока стоит преобразователь сигнала и судя по всему именно он то и бздит.
Стоимость нового блока за номером 3746100XK80XA89 от 4800 до 6300
Б.У. 900 р
Заказал с разбора не заюзаный.
После установки все заработало.
Одновременно с работой над стекло подъемниками переделал подключение авто сигнализации — убрал не нужные сопли.и пере подключил концевики дверей через диоды для развязки.
Источник
LIN — цифровая шина в автомобиле


Sync Break — передача данных всегда начинается с притягиванию к нулю шины не менее чем на 13 тактов. Увидев эту притяжку, все устройства на шине оживают, и понимают, что сейчас пойдет что то интересное и начинают ждать. А далее следует:
Sync Field — сигнал синхронизации. Все устройства на шине обязаны подстроится под этот сигнал и подстроить свои тактовые сигналы.
PID Field — служебный байт, который содержит адрес конкретного устройства на шине, последующую длину данных байт и два бита контроля ошибок
Data — передаваемые данные, до восьми байт
Checksum — контрольная сумма
Общее описание стало понятно, пора было собрать макетную плату контроллера шины.
За основу взят микроконтроллер ATTiny13 и транслятор-приемник шины LIN TJA1020 Регулятор положения сделан на обычном энкодере. Вот получилась такая схема:

Далее пошло изучение даташита контроллера шагового мотора. AMIS-30621 это контроллер последнего поколения, который включает в себя все, что можно. Он имеет ЦАП, контроль тока, контроль температуры, напряжения, режим разгона-торможения, настройку силы тока и еще кучу настраиваемых параметров. Достаточно ему подать команду, насколько нужно нашагать, остальное полностью он делает сам. Очень умный драйвер короче. Даташит немного замудреный, много неясностей было при прочтении, но в итоге удалось оживить этого монстра, читать с него данные и управлять им. Вот пример из анализатора:

А вот пример из кода:
Сначала нужно считать данные состояния, это обязательное условие из даташита:
void GetFullStatus (void)
<
// PREPARING FRAME
SyncLIN (); // Sync Break и Sync Field
DataTX(0b00111100); // Identifier
DataTX(0x80); // AppCMD
DataTX(0x81); // CMD
DataTX(0b11110000); // slave address
DataTX(0xff); // DATA
DataTX(0xff); // DATA
DataTX(0xff); // DATA
DataTX(0xff); // DATA
DataTX(0xff); // DATA
DataTX(0b00001101); // CHK байт контроля ошибок
// READING FRAME
SyncLIN (); // Sync Break и Sync Field
DataTX(0B01111101);
В ответ драйвер мотора посылает восемь байт своего состояния, после этого можно слать команду установки на нужную позицию — мотор оживает и делает нужное количество шагов:
SyncLIN ();// Sync Break и Sync Field
DataTX(0x3c); // Identifier
DataTX(0x80); // AppCMD
DataTX(0x8b); // CMD
DataTX(0xf0); // AD1[6:0] slave address 1 шагового мотора
DataTX(0x55); // DATA нужная позиция 1 мотора (16 бит, поэтому в два захода)
DataTX(0xff); // DATA нужная позиция 1 мотора
DataTX(0xNN); // DATA slave address 2-го шагового мотора
DataTX(0xNN); // DATA нужная позиция 2 мотора (16 бит, поэтому в два захода)
DataTX(0xNN); // DATA нужная позиция 2 мотора
DataTX(0xNN); // CHK контрольная сумма
Это минимальный код, заставляющий двигаться шаговый мотор. В железе это вышло так:

Внизу: плата контроллера
Слева: программатор
Вверху: шаговый мотор и драйвер
Плата драйвера крупнее:

В итоге можно организовать корректор вертикального положения фар, управляемый при помощи энкодера (управлять шаговым мотором при помощи шагового энкодера — что может быть лучше?) с отдельным управлением левой и правой фарой (для сервисной настройки фар) с возможностью оперативного изменения угла энкодером и все это от одного управляющего проводка.
Источник
Применение локальной шины LIN в современном автомобиле
Развитие прогресса в автомобилестроении неуклонно ведет к повышению требований к управлению, возрастает объем функций, на совершенно новый уровень переходит информационная составляющая о работе и поведении автомобиля. В связи с этим бортовая электроника наращивает свое присутствие в современном автомобиле. По статистике, количество блоков управления в нем за последние 15 лет увеличилоь более чем в пять раз, и эта тенденция сохраняется. Потребителю хочется иметь полный контроль над любимым авто и над дорогой. Последние модели могут обойтись в сложной ситуации без водителя и принять решение согласно заложенной программе. Такие вопросы, как парковка или проезд по размытому участку сельской дороги машина может решить самостоятельно, без участия человека. С каждым годом все реальнее и ближе введение элементов автопилотирования, применяемых в авиации.
Увеличившееся число электронных модулей вынудило, в свою очередь, находить и внедрять новые технологии передачи данных между отдельными блоками управления. В вычислительной технике они уже давно существовали, поэтому оставалось только перенести опыт их использования и стандартизировать применительно к автомобилю. Сначала произошло внедрение шины данных CAN. У ведущих проиводителей это случилось в середине 90-х годов. Однако пропускной способности и скорости этой технологии хватило примерно лет на 10, после чего встал вопрос о дальнейшем развитии системы передачи информации. Особенно заметны проблемы стали после повсеместного применения инормационно-развлекательного контента. Вместе с ним пришли и технологии, применяемые в кабельном телевидении и в современных системах связи, включая диагностику и сервис.
В итоге к завоевавшей уважение и известной шине CAN на сегодня добавились:
— шина LIN (однопроводная шина);
— шина MOST (оптоволоконная шина) (рис. 1);
— беспроводная шина Bluetooth™.
Рис. 1. Оптоволоконная шина MOST в современном автомобиле
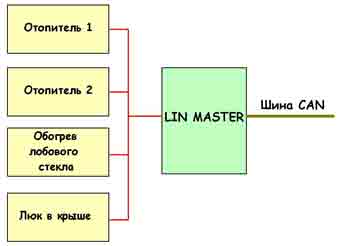
В этой статье мы рассмотрим алгоритм работы однопроводной шины LIN. Local Interconnect означает, что все блоки управления данной сети находятся в пределах одного условно ограниченного модуля (к примеру: багажника, крыши, мотора вентилятора и др.).
Блок управления LIN Master
Напомним, что блоки управления LIN Master сопряжены с шиной данных CAN и выполняют мастер-функции управления определенной шиной LIN.
Приведем основные функции блока LIN Master:
— контролирует передачу данных в шине LIN и скорость обмена;
— отправляет посылки-телеграммы в шину LIN. В его ПО заложен цикл, какому подчиненному блоку, когда, как часто и какие посылки-телеграммы отправлять;
— выполняет функцию сопряжения подчиненных блоков шины LIN с шиной данных CAN, так как является единственным блоком управления отдельной шины LIN, подключенным к шине данных CAN (рис. 2);
Рис. 2. Применение шины LIN в современном автомобиле
— обеспечивает процесс диагностики подключенных блоков управления LIN Slave (рис. 3).
Рис. 3. Блоки управления LIN Slave
Блоки управления LIN Slave
Подключенные или подчиненные блоки управления LIN Slave в рамках отдельной системы шины данных LIN выполняют функции контроля и управления работой отдельных устройств, например, мотора вентилятора, привода люка в крыше, а также датчиков и исполнительных механизмов (датчик уклона, ручного тормоза, сирена противоугонной сигнализации и т.д.). Датчики измеряют или контролируют какие-либо величины и передают сигнал в аналоговом виде. Блок управления LIN Slave анализирует и преобразовывает принятые параметры в цифровую форму. Затем эти величины передаются по шине LIN в виде цифрового сигнала.
Блок управления LIN Master опрашивает исполнительные устройства (посылает телеграмму), получает информацию о состоянии, что позволяет провести сравнительный анализ между фактическим и расчетным состоянием и влиять на работу исполнительных механизмов через блоки управления LIN Slave. Каждый блок LIN Slave обладает электронными или электромеханическими функциями и имеет свой адрес. Адрес передается в заголовке посылки-телеграммы и его опознает блок, за которым закреплен этот адрес, иными словами происходит идентификация обращения.
Технически интерфейс LIN реализуется просто и надежно. Сопряжение блоков LIN Slave с управляющим блоком LIN (Master) осуществляется по однопроводной линии с помощью одноконтактного разъема, одного на всех.
Рассмотрим алгоритм передачи данных.
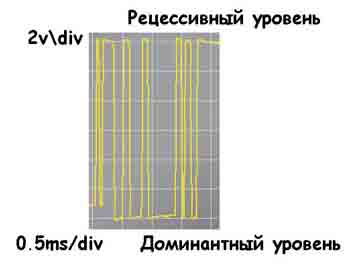
Если по шине LIN не происходит передача телеграмм или передается «рецессивный» бит, то уровень сигнала будет около 12 В, если будет передан «доминантный» бит, то передатчик замыкает на «массу» и уровень будет близок к нулю (рис. 4) Последовательность доминантных и рецессивных битов и составляет телеграмму, с помощью которой блок управления LIN Master обменивается с блоками LIN Slave. В различных модификациях приемопередатчиков (трансиверов) внешний вид рецессивных и доминантных уровней может иметь отличия.
Рис. 4. Осциллограмма сигналов шины LIN
Чтобы устранить влияние различных факторов на качество работы шины LIN, при передаче возможны отклонения от заданных уровней (0 и 12 В) не более чем на 2 В (рис. 5).
Рис. 5. Диапазон напряжений при передаче
Уровень приема еще более защищен и сигналы принимаются амплитудой с отклонением до 40% от заданных (рис. 6).
Рис. 6. Диапазон напряжений при приеме
Опишем непосредственно «телеграммы», с помощью которых происходит общение блоков по шине LIN.
По такому алгоритму и происходит обмен между блоками, сопряженными шиной LIN.
Реализация этого алгоритма начинается с того, что блок LIN Master с определенным циклом обращается к блокам LIN Slave, посылая заголовок телеграммы (рис. 7). Цикл обращения установлен программным обеспечением и может изменяться в зависимости от ситуации, режимов работы автомобиля и других факторов.
Рис. 7. Осциллограмма заголовка телеграммы
Обращение относится ко всему возможному оборудованию, если каких-либо устройств нет на шине LIN, а это зависит от количества опций, которое оплачено владельцем, то обмен с отсутствующими блоками не состоится. Иными словами, на свой запрос к некоторым возможным блокам LIN Slave останется без ответа, ибо эти блоки просто отсутствуют в данной модификации. Это обстоятельство не влияет на работу. Если данные блоки будут поставлены, алгоритм работы с ними восстановится, напомним, что их может быть до 16-ти на каждый блок управления LIN Master.
Теперь подробнее о самой реализации взаимодействия.
Как было сказано ранее, блок управления LIN Master посылает с разной периодичностью, зашитой в программном обеспечении, опросные телеграммы. Каждая телеграмма содержит заголовок (Header) и собственно текст, состоящий из переданных данных.
Заголовок состоит из четырех частей (рис. 7):
— пауза в синхронизации;
Опишем каждую из них.
Пауза в синхронизации (synch break)
Представляет собой не менее 13-ти битов, пересылаемых доминантным уровнем, что в вычислительной технике расценивается как передача не менее 13-ти «нулей». Блоки LIN Slave имеют возможность настроиться на прием телеграммы, ибо в тексте самой телеграммы не может быть подобной информации и столь долгая передача только доминантного уровня подсказывает блокам, что после этого поля последуют другие.
Окончание синхронизации (synch delimiter)
Эта часть передается рецессивным уровнем (около 12 В), что соответствует передаче «единицы» и сообщает блокам LIN Slave о том, что пауза закончилась и необходимо приготовиться к синхронизации.
Поле синхронизации (synch field)
Эта часть заголовка служит для непосредственной настройки блоков LIN Slave на работу с блоком управления LIN Master. Поле состоит из последовательности доминантных и рецессивных битов, то есть последовательности «нулей» и «единиц». Таким образом синхронизируется частота, на которой блоки LIN Slave должны работать по шине LIN, принять поле идентификатора и последующие за ним данные.
Это поле состоит из восьми бит. В первых 6-ти битах передаются адрес блока LIN Slave для его опознавания (идентификации) и количество полей для передачи данных, отведенных для ответа (от 0 до 8). Два оставшихся бита предназначены для передачи контрольной суммы. Контрольная сумма вычисляется согласно определенному алгоритму и необходима для того, чтобы избежать ошибок в передаче. При совпадении контрольной суммы оборудование считает что информация передана корректно.
Рис. 8. Осциллограмма ответа
Если необходимо изменить скорость вращения вентилятора, то блок управления LIN Master посылает телеграмму с нужной скоростью вращения, и блок LIN Slave, получив указание, изменяет скорость вентилятора (рис. 9).
Рис. 9. Регулировка скорости вращения вентилятора
Напомним, что опрос блоков LIN Slave осуществляется с частотой, заложенной в программном обеспечении, но при изменении ситуации эта частота может меняться. Факторов к изменению частоты обращения к блокам LIN Slave тем больше, чем лучше ПО и чем современнее бортовое оборудование автомобиля.
Комплектация современного автомобиля может быть разной, и если блок управления LIN Master имеющий полное ПО, посылает запрос несуществующему блоку LIN Slave, то заголовки телеграмм возвращаются к LIN Master без ответа (рис. 10). Это не мешает алгоритму работу шины LIN и при установке соответствующего блока LIN Slave незамедлительно начинается его опрос и контроль работы со стороны блока управления LIN Master.
Рис. 10. Осциллограммы с заголовками телеграмм без ответов
Алгоритм работы шины LIN постоянно находится под контролем блока управления LIN Master и потому защищен от несанкционированного внешнего доступа (от блоков, размещенных за наружной обшивкой автомобиля), что и позволяет размещать блоки LIN Slave, которые работают только на выполнение команд от LIN Master и не требуют передачи данных на внешних деталях машины. Вмешательство извне затруднено, поэтому, к примеру, блок управления открытием гаражных ворот может располагаться в переднем бампере.
Диагностика шины LIN и всех блоков, сопряженных с этой линией, осуществляется через диагностический разъем. При тестировании происходит имитация обмена между блоками, анализируются ответы от блоков LIN Slave и задающие команды от LIN Master.
Автор: Михаил Митин (г. Москва)
Мнения читателей
Нет комментариев. Ваш комментарий будет первый.
Вы можете оставить свой комментарий, мнение или вопрос по приведенному выше материалу:
Источник
Что такое шина LIN
Шина LIN – это простая последовательная однопроводная шина для автомобильных применений и используется в тех случаях когда применение CAN шины – дорого. По шине LIN управляются различные приводы (корректоры фар, заслонки климатической системы, приводы центрального замка), а так же собирается информация с простых датчиков (датчики дождя, света, температуры).
Для изучения шины LIN Вы можете использовать наш адаптер CAN-Hacker 3.0 с дополнительной опцией LIN анализатора.
А так же интерфейс CAN-Hacker CH-P
Пример системы управления дверью с шиной LIN и без нее:

Еще пример, в автомобиле Porsche Macan 2015 г. все привода и датчики климатической системы подключены к шине LIN а сам блок климат контроля связан с автомобилем при помощи CAN шины.
Дешевизна LIN обусловлена тем что реализация протокола LIN полностью программная и строится на базе обычного UART (родственник RS232, COM порт). Так же LIN не требует применения точных времязадающих цепей – кварцевых резонаторов и генераторов. Поэтому можно применять дешевые микроконтроллеры.
Скорость передачи данных
Скорость передачи данных на шине LIN стандартная для устройств построенных на базе UART: 2400; 9600; 10400; 19200; 20000 Бод. Это немного но достаточно для передачи данных от датчиков и для управления медленными механизмами.
Электрическая реализация LIN
Электрически интерфейс LIN реализован так же просто. В каждом узле линия шины подтянута к шине питания +12V. Передача осуществляется опусканием уровня шины до уровня массы GND. Микроконтроллер подключается к шине LIN при помощи специальной микросхемы Трансивера, например TJA1021

Подключение LIN трансивера к микроконтроллеру

Архитектура сети LIN

Особенностью шины LIN является то, что в сети присутствует два вида узлов: Master и Slave, Master – ведущий, Slave – подчиненный.
Master может опрашивать Slave о его состоянии, будить его, отправлять ему команды. Обмен информации на шине LIN происходит в формате обмена пакетами, и на первый взгляд может показаться что механизм идентичен шине CAN, это не так. Объясняем почему:
Структура LIN пакета выглядит так:

Frame – Header – заголовок кадра, который отправляется в шину Мастером. Включает в себя ID кадра
Уловите разницу – в шине CAN все узлы передают и ID кадра и данные. В шине LIN – заголовок пакета это задача Мастер-узла.

Поле Frame-Header состоит из полей:
BREAK – Это сигнал шине о том что мастер сейчас будет говорить
Поле синхронизации – это просто байт = 0x55. При его передаче приемники подстраивают свою скорость.
PID – это поле защищенного идентификатора. В дальнейшем будем писать просто – идентификатор.
Идентификатор может принимать значения от 0 до 59 (0x3B в HEX) для пользовательских пакетов. Так же возможно использование специальных служебных пакетов с ID 0x3C, 0x3D, 0x3E и 0x3F. Защищенность идентификатора заключена в следующем:

В структуре байта ID мы видим биты собственно самого идентификатора с ID0 по ID5, а затем идут два контрольных бита P0 и P1, которые рассчитываются так:
P0 = ID0 ⊕ ID1 ⊕ ID2 ⊕ ID4
P1 = ¬ (ID1 ⊕ ID3 ⊕ ID4 ⊕ ID5)
ID = 0x0C PID = 0x4C
Если в PID контрольные биты рассчитаны неверно то пакет не будет обработан принимающей стороной.
В случае если мы будем эмулировать работу какого либо узла Master, предварительно изучив отправляемые им данные при помощи LIN сниффера, то нам не придется задумываться о расчете контрольных битов ID, поскольку в пакетах которые мы видим сниффером все уже посчитано до нас.
После того как Slave принял Header мастера он отвечает полем Frame Response который состоит из байтов данных в количестве от 1 до 8 и байта контрольной суммы.
Обратите внимание на отсутствие поля DLC отвечающего за количество байтов данных как в CAN шине. В шине LIN количество байтов данных определяется на этапе написания ПО контроллера. Поэтому процесс обмена на шине LIN сложнее анализировать при помощи сниффера – приходится вводить специальный алгоритм разделения пакетов, который угадывает сколько байтов данных было в принятом пакете.

На этой схеме мы видим как один Мастер общается с двумя узлами Slave. Обратите внимание на третий кадр, в нем заголовок Header и тело пакета Response передает Мастер – это важный момент, такие кадры используются для диагностики и конфигурирования Slave узлов.
На осциллограмме обмен одного Master и одного Slave выглядит так:

Здесь мы видим запрос мастера состоящий из полей Break – S – затем следует ответ узла Slave состоящий из четырех байт и контрольной суммы равной 0x3F.
Если мы отключим узел Slave от шины LIN, то увидим уже такую осциллограмму:

ID=0x3C DATA : FF FF FF FF FF FF FF FF
Обмен диагностическими сообщениями на шине LIN выглядит так :

При помощи длинных пакетов Master может конфигурировать и программировать узлы Slave. Если для программирования или конфигурирования узла LIN необходимо более 8 байт, то поток данных сегментируется и пересылается частями. Механика передачи данных определяется специальным транспортным протоколом работающим поверх физики шины LIN, о нем мы напишем в следующих статьях.
Видео пример работы с шиной LIN и адаптером CAN-Hacker 3.2
Источник
- Новости 12 Вольт
- Определение can и lin шин с помощью пробника Pandora ALT-205
Часто у меня спрашивают: «Как можно распознать can шину в автомобиле?». Самый простой способ – провода can идут всегда в витой паре (скрученные между собой). Но в современных авто этих витых пар очень много бывает. Как же определить нужную нам пару?
На помощь приходит прибор от компании Алармтрейд: пробник Pandora ALT-205, про который уже упоминалось в статье «Пробник для установщиков от Pandora». С 28-го июля 2015 года на сайте alarmtrade в разделе «Сервис» можно скачать новое ПО для пробника.
Данный прибор разработан специально для облегчения установки охранных систем и доп.оборудования в автомобили. В нём уместилось множество алгоритмов работы, которые позволяют найти специфические сигналы и точки подключения, необходимые для установки автосигнализаций и другого дополнительного оборудования.
Благодаря встроенному micro USB разъёму можно с лёгкостью обновить ПО пробника, тем самым расширив его функционал.
В новую прошивку инженеры Alarm Trade добавили режим распознавания цифровых шин. Главная задача нового режима – это помощь специалисту по автоэлектрооборудованию в правильном подключении к цифровым шинам автомобиля проводами автосигнализации.
При работе в режиме распознавания цифровых шин Pandora ALT-205 может определить большинство современных can-шин со скоростями 50-500 кбит/с (с определением конкретно Can-High и Can-Low), Lin-шину, тахометрический сигнал, отличить сигнал тахометра от цифровой шины уникального формата, аудиосигнала и т.п.
В итоге, если раньше насчитывалось 4 режима работы Pandora ALT-205, то теперь этих режимов 5.
Это режимы:
- Частотометра TAHO/DATA
- Генератора GENERATOR
- Измерения длительности одиночного импульса PULSE TIMING
- Вольтметра и детектора «земли» VOLT/SENS
- Определения цифровых шин CAN DETECT
Видео определения шин CAN и LIN в автомобиле при помощи пробника Pandora ALT-205
Щиток приборов:
Лев. р-ём жёлто/зелёный ручник, в разрыв с диодом.
Прав. р-ём тёмно/зелёный…
Автор: Дмитрий
impreza wrx gh 2008 силовое открытие багажника седан
сине чёрный из блока uim над педелью газа…
Автор: seis
Solio 2017 центральный замок, жгут из двери водителя, большой разъем, крайние тонкий белый и…
Автор: Евгений
В водительской двери силы нет, только слаботочка
Автор: Stuf74
Здравствуйте, что можно заблокировать на этом авто?
Автор: Виталий 484
Как проверить lin шину мультиметром
Диагностика и ремонт: Шина системы Lin
В середине 90-х годов для обеспечения безопасности и комфорта на автомобиле «представительского» класса могло быть от 10 до 15 блоков управления.
В настоящее время такого количества блоков управления уже недостаточно, оно увеличилось, возможно, в два раза (или больше).
Такое стремительное увеличение количества блоков управления заставило производителей искать новые пути решения задач для поддержания бесперебойной и стабильной связи между блоками управления.
И в настоящий момент уже существуют следующие технологии передачи данных:
– шина LIN (однопроводная шина)
– шина MOST (оптоволоконная шина)
– беспроводная шина Bluetoot h
В данной статье мы рассмотрим шину LIN .
Шина под названием » LIN » — это сокращение от полного названия: » Local Interconnect Network «, то есть, «локальная коммутируемая сеть».
Это означает. что все коммутируемые блоки управлению подключены и располагаются в пределах одного ограниченного пространства, например, крыши автомобиля, двери автомобиля и так далее.
Обмен данными между коммутируемыми блоками системы LIN происходят по шине данных CAN .
У шины LIN есть особенность: она однопроводная.
Цвет изоляции провода — фиолетовый (на нем может быть цветная маркировка).
Толщина провода (площадь поперечного сечения) составляет около 0.35 мм2.
Провода шины LIN экранировать не обязательно.
Однако, как уже говорилось, скорости передачи данных по шине CAN и шине LIN различные.
Различными также являются и сигналы.
Для этого был придуман так называемый «Блок управления LIN-Master «, который является своеобразным «переводчиком» между шиной LIN и шиной CAN :
У этого блока существует довольно много задач:
— контроль передачи данных
— контроль скорости передачи данных
— постоянная диагностика работоспособоности всех блоков, подключенных к шине LIN
Итак, что такое LIN Master мы разобрались.
Но есть еще такое понятие, как LIN Slave .
Это не что иное, как исполнительные механизмы, электронные или электронномеханические узлы или блоки, получающие команды от блока LIN Master .
Но не только команды.
Может (и постоянно идет) опрос всех подключенных компонентов по текущему и фактическому состоянию, для своевременного обнаружения неисправности и возможности выполнять заданные функции.
Как видно из фото 1, для нескольких исполнительных механизмов требуется только один контакт () в блоке pin LIN Master .
Скорость передачи данных в шине LIN невысокая и составляет приблизительно от 5 до 25 кбитсек.
Рецессивный уровень
Если на шину данных LIN не будет послана телеграмма или рецессивный бит, то на шину данных подается напряжение, практически равное напряжению аккумуляторной батареи.
Для передачи доминирующего бита по шине данных LIN в передающем блоке управления шина данных замыкается на массу через приемопередатчик (трансивер) — см. фото 2 :
Надежность и стабильность передачи данных обеспечивается установлением определенных допусков в сигналах на рецессивном и доминантном уровнях.
Между блоками Slave и Master постоянно «курсируют» телеграммы определенной формы.
Блок управления LIN Master периодически посылает телеграммы, которые строго разделены на четыре составляющие:
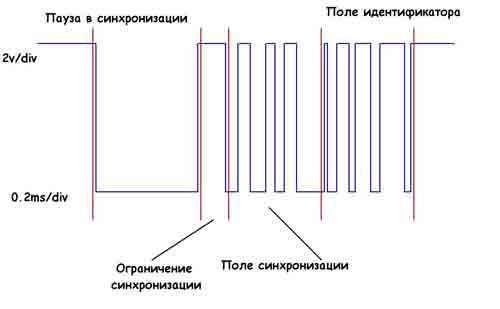
1 — пауза в синхронизации
2 — ограничение синхронизации
3 — поле синхронизации
4 — поле идентификатора
В посланной телеграмме, так называемая «пауза в синхронизации» нужна для того, что бы «сообщить» блокам о том, что посылается телеграмма. Минимальная пауза в синхронизации равняется времени передачи 13 битов. Пауза посылается с доминантным уровнем.
Поле синхронизации требуется для того, что бы все исполнительные блоки могли настроиться или проверить свои настройки перед приемом телеграммы — оно состоит из строго определенной последовательности битов 0101010101.
Источник
Шина LIN. Сканирование “молчащих” блоков и датчиков
Как было описано в предыдущей статье, в структуре шины LIN есть Master узел и Slave узлы. Master опрашивает узлы Slave, а те ему отвечают. В большинстве случаев если просто подать питание на Slave и посмотреть что происходит на его выходе шины LIN, то мы ничего не увидим, поскольку Slave ожидает запрос или пакет от Master узла.
Master узлом как правило является какой-либо блок управления: Блок управления двигателем, салоном, креслами и т. д. А Slave узлы это различные цифровые датчики, приводы, блоки кнопок управления или джойстики.
Что же делать если стоит задача “оживить” Slave в отрыве от мастера? Например во время проведения ремонта с целью выяснить исправность Slave узла и вообще шины LIN.
Для решения этой задачи удобно использовать LIN адаптер LIN-K совместно с USB-CAN интерфейсом CAN-Hacker. Программное обеспечение нашего анализатора шины LIN позволяет автоматически искать запросы для Slave узлов сети LIN.

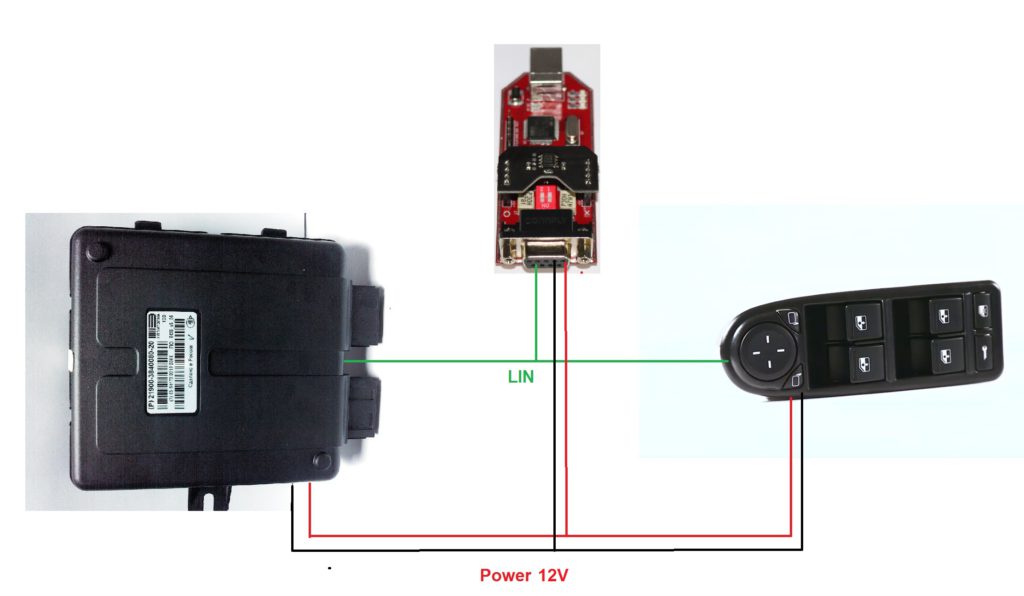
Блок управления стеклоподъемниками автомобиля LADA. Slave узел на шине LIN
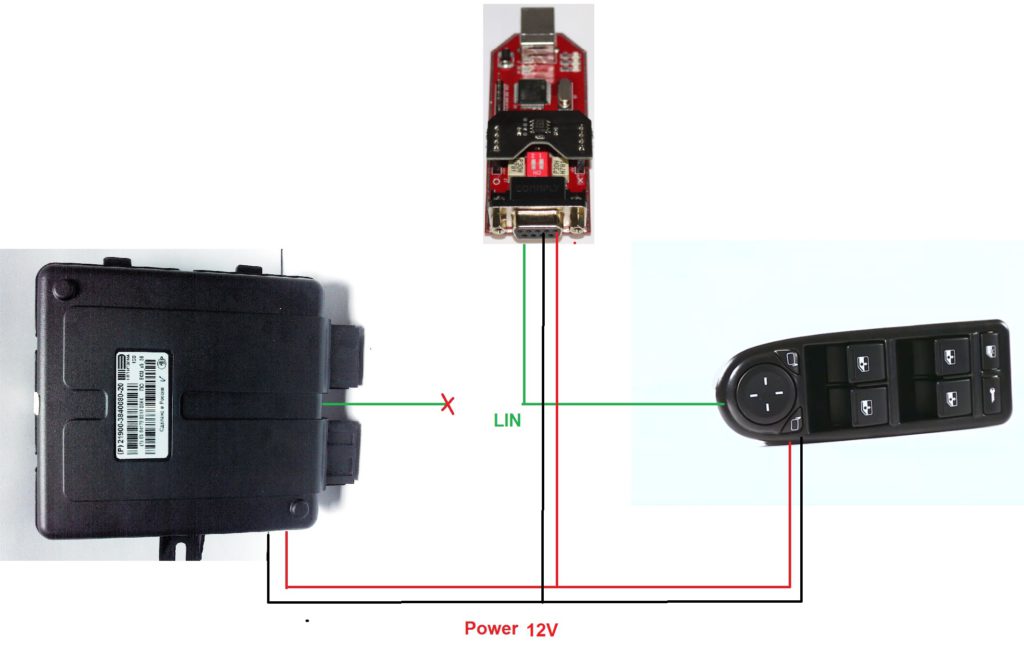
В качестве примера рассмотрим работу с блоком управления стеклоподъемниками от автомобиля LADA Granta.
Блок управления стеклоподъемнками является Slave узлом в LIN шине автомобиля LADA, а Master узлом является блок управления комфортом, который отправляет запросы на Slave узлы, а те в свою очередь отвечают ему о своем состоянии. В частности блок управления стеклоподъемниками отвечает статусом нажатия кнопок.

Блок комфорта автомобиля LADA. Master на шине LIN
Если соединить эти блоки в сеть и параллельно подключить LIN анализатор LIN-K на скорости 9600 бод и будем нажимать кнопки на блоке стеклоподъемников, то мы увидим следующий обмен с пакетами имеющими >
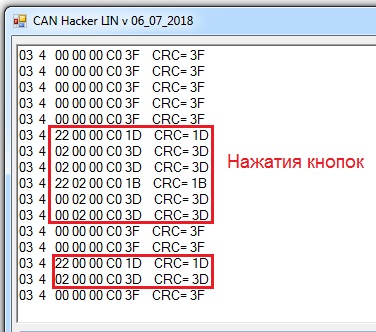
Пакеты с данными: 00 00 00 C0 – говорят о том, что кнопки не нажаты, если же нули меняются на другие числа, например 20 02 00 С0 говорят о нажатии кнопок.
Теперь представим, что мастер узла в лице блока комфорта у нас нет, а запустить Slave – блок стеклоподъемников нужно. Для этого подадим питание на исследуемый блок и LIN адаптер и подключимся к выводу LIN.
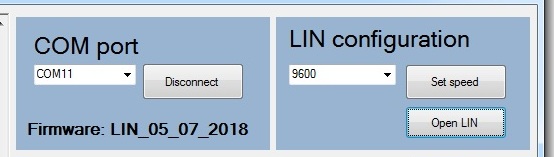
Выберем в программе LIN-K виртуальный COM порт к которому подключен наш LIN адаптер, нажмем Connect. Затем установим скорость LIN 9600 бод и нажмем Open LIN.
В окне принятых сообщений ничего нет. Это следствие того, что Slave ждет запроса от Master -а.
Настроим LIN-K на передачу запросов в заданном диапазоне – функция Bombing
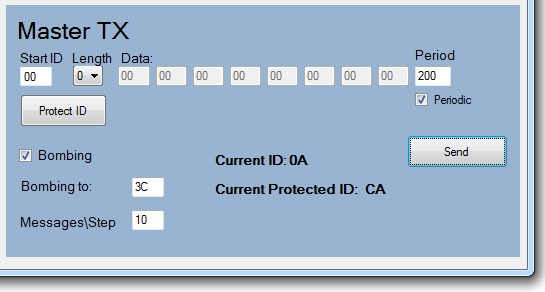
В такой конфигурации LIN-K будет передавать запросы узлу Slave в диапазоне всех возможных ID на шине LIN от 0 до 0x3C. С каждым ID будет передаваться по 10 запросов.
В случае если Slave прореагирует на отправленный запрос мы увидим этот факт в окне приема:
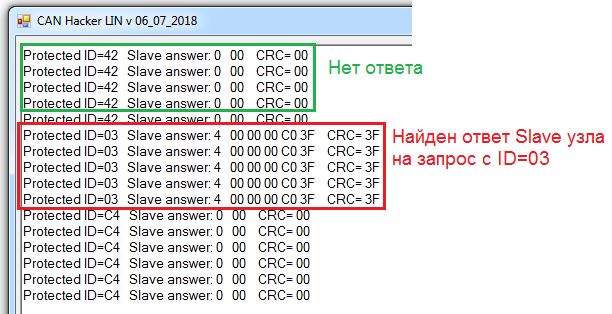
Как видно из скриншота Slave прореагировал на посылаемый ему запрос с >
Следует обратить внимание на то, что в передаваемых LIN анализатором ID автоматически рассчитываются биты защиты и значение ID отличается от значения в счетчике, например по счетчику а передаваемое значение с битами защиты будет равно =0x42
Далее мы можем убрать флаг Bombing и установить значение ID для Master запроса = 03 и мы будем получать ответы от “ожившего” блока кнопок
Источник
Автомобильный справочник
для настоящих любителей техники
LIN шина

LIN протокол разработан для создания дешевых локальных сетей обмена данными на коротких расстояниях. Он служит для передачи входных воздействий, состояний переключателей на панелях управления, а также ответных действий различных устройств, соединенных в одну систему через LIN.
Первая спецификация стандарта под брендом LIN была издана в 1999 году по инициативе консорциума европейских автопроизводителей и других известных компаний, включая Audi AG, BMW AG, Daimler Chrysler AG, Motorola Inc., Volcano Communications Technologies AB, Volkswagen AG и VolvoCar Corporation. Последняя спецификация, LIN 2.2, издана в 2010 году. В настоящее время документы стандарта переданы под контроль Международной организации по стандартизации (ISO), где стандарту был присвоено новое наименование ISO 17987. В связи с политикой ISO копия стандарта стала платной.

Шина LIN
LIN шина (локальная сеть воздействия) была разработана для удовлетворения потребностей в связи для систем класса А (см. табл. «Классификация шинных систем» ) с использованием самого экономичного оборудования. Типичные области применения:
- Дверной модуль с дверным замком;
- Приводы стеклоподъемников;
- Регулировка боковых зеркал заднего вида;
- Система кондиционирования (передача сигналов от элемента управления, активация вентилятора свежего воздуха).
Текущую спецификацию LIN можно найти на сайте консорциума LIN.
Важные особенности шины LIN:
- Концепции с одним ведущим и несколькими ведомыми устройствами;
- Небольшая стоимость оборудования за счет передачи данных по неэкранированному однопроводному кабелю;
- Самосинхронизация ведомых устройств без кварцевого генератора;
- Связь в виде очень коротких сообщений;
- Скорость передачи данных до 20 кбит/с;
- Длина шины до 40 м, до 16 узлов.
Система передачи в шине LIN
Шина LIN представляет собой неэкранированный однопроводный кабель. Уровень шины может принимать два логических состояния. Доминантный уровень соответствует напряжению приблизительно 0 В (масса) и представляет собой логический 0. 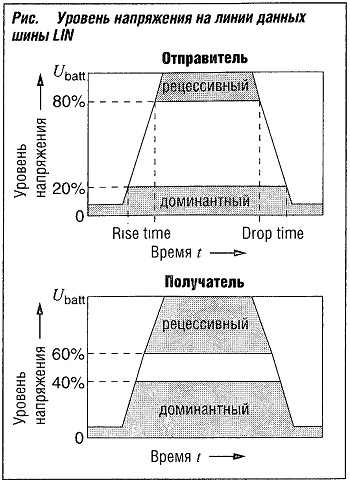 Рецессивный Уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Рецессивный Уровень соответствует напряжению батареи Ubatt и представляет собой логическую 1.
Из-за наличия разных вариантов электрических цепей уровни могут быть разными. Определение допусков на передачу и прием в области рецессивных и доминантных уровней обеспечивает стабильную передачу данных. Диапазоны допусков шире на приемном конце (рис. «Уровень напряжения на линии данных шины LIN» ), чтобы действительные сигналы тоже можно было получать, несмотря па излучаемые помехи.
Скорость передачи по шине LIN ограничена величиной 20 кбит/с. Это компромисс между большой крутизной фронта импульсов, необходимой для синхронизации ведомых устройств, с одной стороны, и небольшой его крутизной, необходимой для улучшения ЕМС — с другой. Рекомендуемая скорость передачи составляют 2400, 9600 и 19200 бит/с. Минимально допустимая скорость составляет 1 кбит/с.
Максимальное количество узлов не регламентируется в спецификации LIN. Теоретически оно ограничено количеством доступных идентификаторов сообщений. Возможности линии и узла и крутизна фронта импульсов ограничивают сочетание длины и количества узлов сети LIN. Рекомендуется не более 16 узлов.
Пользователи шины обычно располагаются в линейной топологии; однако эта топология не является обязательной.
Доступ к шине LIN
Доступ к шине LIN обеспечивается на основе доступа «ведущий-ведомый». В сети имеется ведущее устройство, инициирующее каждое сообщение. Ведомое устройство имеет возможность ответить. Обмен сообщениями происходит между ведущим и одним, несколькими либо всеми ведомыми устройствами.
Во время обмена сообщениями между ведущим и ведомым устройством возможны следующие взаимосвязи:
- Сообщение с ответом ведомого: ведущее устройство передает сообщение одному или нескольким ведомым устройствам и запрашивает данные (например, состояния измеренных значений);
- Сообщение с инструкцией ведущего: ведущее устройство передает инструкции ведомому устройству (например, включение сервопривода);
- Сообщение для использования: ведущее устройство инициирует связь между двумя ведомыми устройствами.
Протокол LIN
Фрейм данных LIN
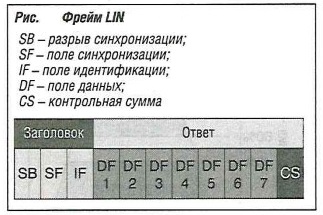 Информация на шине LIN встраивается в определенный фрейм данных, фрейм LIN (рис. «Фрейм LIN» ). Инициированное ведущим устройством сообщение начинается с заголовка. В поле сообщения (ответ) содержится различная информация, зависящая от типа сообщения. Если ведущее устройство передает инструкции ведомому устройству, то оно описывает поле сообщения данными, которые должно использовать ведомое устройство. В случае запроса данных адресуемое ведомое устройство описывает поле сообщения данными, запрошенными ведущим устройством.
Информация на шине LIN встраивается в определенный фрейм данных, фрейм LIN (рис. «Фрейм LIN» ). Инициированное ведущим устройством сообщение начинается с заголовка. В поле сообщения (ответ) содержится различная информация, зависящая от типа сообщения. Если ведущее устройство передает инструкции ведомому устройству, то оно описывает поле сообщения данными, которые должно использовать ведомое устройство. В случае запроса данных адресуемое ведомое устройство описывает поле сообщения данными, запрошенными ведущим устройством.
Заголовок
Заголовок состоит из разрыва синхронизации, поля синхронизации и поля идентификации.
Синхронизация LIN
Синхронизация происходит в начале каждого фрейма для обеспечения последовательной передачи данных между ведущим и ведомыми устройствами. Сначала разрывом синхронизации четко определяется начало фрейма. Он состоит из не менее 13 последовательных доминантных уровней и одного рецессивного уровня.
После разрыва синхронизации ведущее устройство передает поле синхронизации, состоящее из последовательности битов 01010101. Это дает ведомым устройствам возможность адаптироваться к временной оси ведущего. Тактовый импульс ведущего устройства не должен отличаться от номинального значения более чем на ±0,5%. Тактовый импульс ведомых устройств перед синхронизацией может иметь разброс ±15 %, если синхронизация к концу сообщения достигает уровня ±2 %. Таким образом, ведомым устройствам не нужен дорогой кварцевый генератор — они могут быть выполнены, например, с экономичной резистивно-емкостной цепью.
Идентификатор LIN
Третий байт в заголовке служит идентификатором LIN. По аналогии с шиной CAN здесь используется адресация по содержанию — идентификатор дает информацию о содержании сообщения. Все подключенные к шине узлы на основании этой информации решают, намерены ли они получить и обработать сообщение или же проигнорировать его (фильтрация при приемке).
Шесть или восемь битов в поле идентификатора определяют сам идентификатор; из них получается 64 возможных идентификатора (ID). Имеются следующие значения:
- ID = 0 — 59: передача сигналов;
- ID = 60: запрос команд и диагностики от ведущего устройства;
- ID = 61: отклик ведомого устройства на ID 60;
- ID = 62: зарезервирован для связи с изготовителем;
- ID = 63: зарезервирован для будущих расширений протокола.
Из 64 возможных сообщений 32 могут содержать только два байта данных, 16 — четыре байта данных, и остальные 16 — восемь байтов данных.
Последние два разряда в поле идентификации содержат контрольные суммы, защищающие идентификатор от ошибок при передаче и неправильного распределения сообщений.
Поле данных
После передачи ведущим устройством заголовка начинается передача фактических данных. Ведомые устройства по переданному идентификатору определяют, являются ли они адресатами и, при необходимости, отправляют ответ в поле данных.
В один фрейм можно включить несколько сигналов. Здесь у каждого сигнала есть один генератор, т.е. он всегда описывается одним и тем же узлом сети. Во время работы не разрешается сопоставлять сигналу другой генератор, что возможно в других сетях с управлением по времени.
Данные в ответе ведомого устройства защищаются контрольной суммой (CS).
Описательный файл LIN
Конфигурация шины LIN, т.е. спецификация пользователей сети, сигналов и фреймов, выполняется в описательном файле LIN. Спецификация LIN для этой цели имеет подходящий язык конфигурации.
Из описательного файла LIN автоматически генерируется набор кодов на С и файлов заголовков; эти коды и файлы используются для реализации функций ведущего и ведомых устройств в ЭБУ, расположенных на шине. Таким образом, описательный файл LIN служит для конфигурации всей сети LIN. Это общий интерфейс между автопроизводителем и поставщиками ведущих и ведомых устройств.
Составление графика отправки сообщений
Таблица-график в описательном файле LIN определяет порядок и время отправки сообщений. Часто запрашиваемая информация отправляется время от времени. Когда таблица проработана, ведущее устройство снова начинает с первого сообщения. Последовательность обработки можно изменить в зависимости от режима работы (например, активна/неактивна диагностика, включено/ выключено зажигание).
Таким образом, известен фрейм передачи каждого сообщения. Детерминированные характеристики гарантируются тем фактом, что все передачи инициируются ведущим Устройством в случае управления доступом по принципу «ведущий-ведомый».
Управление сетью LIN
Для минимизации тока замкнутой цепи узлы сети LIN можно переводить в спящий режим. Это можно сделать двумя способами. Ведущее устройство передает команду «перейти в спящий режим» зарезервированным идентификатором 60, либо ведомые устройства переходят в спящий режим автоматически, если в течение относительно длительного времени (4 секунды) не было передачи данных по шине. И ведущее, и ведомые устройства могут снова активировать сеть. Для этого необходимо передать сигнал активации. Он состоит из байта данных с номером 128, обозначающим содержание. После перерыва времени бита 4-64 (разграничитель активации) все узлы должны быть инициализированы и способны ответить ведущему устройству.
Источник
Купил новую машину, узнал что там есть CAN-LIN шина поэтому купил A63 и модуль CAN-LIN к ней. В магазине сразу обновили прошивку для CAN-LIN модуля и выставили в настройках мой автомобиль. С подключением CAN шины проблем вроде не возникло, все как написано в инструкциях http://can.starline.ru/. А вот с LIN шиной возникла заминочка. В качестве точки подключения написан красно-зеленый провод из косы двери водителя. Но там провода с таким цветом нет! Более того, там вообще красных нет! И количество проводов приводимых на картинке 8 а у меня 12! Разобрал карту двери, подключился в разрыв КОРИЧНЕВОГО провода который идёт на замок. Сигнализация стала закрывать все двери кроме водительской! При этом, видимо обнаруживая, что водительский замок открыт, через 5-10 секунд отпирает все двери обратно. А если после постановки на охрану и закрытия остальных замков, закрыть ВРУЧНУЮ водительскую дверь, то всё нормально, она так и оставляет закрытыми двери! Помогите разобраться куда и как подключится.

Для обхода имобилайзера нужна LIN шина (на диагностическом разъеме CAN). Старлайн дает точку подключения за щитком приборов (белый разъем). Но он даже не просматривается за воздуховодом. А снимать панель не хочется.
Подскажите:
— куда идет этот жгут проводов возможно есть другое место.
— можно фото кто снимал верхнюю панель.
Спасибо за любую инфу.

Полный размер
Фото только такого качества(((
Комментарии
14
Войдите или зарегистрируйтесь, чтобы писать комментарии, задавать вопросы и участвовать в обсуждении.