Так как рычаг неоднородный, то он не будет в равновесии, если его подвесить за середину. Запишем условие равновесия рычага в первом случае:
m1gl1 + mgx = m2gl2. (1)
Так, как заведомо известно, что учебник имеет большую массу, чем груз в 100 г, то равновесие возможно, когда центр масс (тяжести) находится правее точки подвеса.
Во втором случае:
m1gl1/ + mgx = m2gl2/. (2)
Из (1) уравнения вычтем (2):
m1(l1 − l1/) = m2(l2 − 12/),
тогда искомая масса учебника:
m2 = (l1 − l1/) / (l2 − 12/) m1. (3)
После вычисления:
m2 = (50 − 42) / (17 − 15) ? 100 г = 400 г.
Определить массу рычага по данным таблицы нельзя. Так как в уравнении (1) или (2) две неизвестные: масса рычага и его плечо.
Содержание:
Рычаг:
Взаимодействие может происходить через промежуточные тела.
Взаимодействие может происходить не только при непосредственном контакте, но и при наличии промежуточных тел. Таких примеров можно привести большое количество. Так, если мастер забивает гвоздь в углублении, он ставит на головку гвоздя металлический стержень и по нему ударяет молотком (рис. 58). Молоток действует на стержень, который, в свою очередь, уже действует на гвоздь.

Можно ли изменять значения силы
Если взаимодействие между телами происходит через промежуточные тела, то можно изменять силы взаимодействия между ними. Оно может изменить как направление силы, так и ее значение. Одним из примеров такого использования промежуточных тел для взаимодействия между телами является рычаг. В быту и на производстве можно наблюдать много таких примеров.
Часто можно видеть, как тяжелый предмет поднимают или перемещают с помощью металлического стержня (рис. 59). В этом случае стержень называют рычагом.

Что такое рычаг
Рычагом называют жесткий стержень, имеющий ось вращения.
Ось вращения рычага может проходить через один из его концов или посередине рычага — между точками приложения сил.
Под действием нескольких сил рычаг может вращаться или быть неподвижным. В последнем случае говорят, что рычаг уравновешен.
Как уравновесить рычаг
Выясним, при каких условиях рычаг, на который действует несколько сил, будет уравновешен.
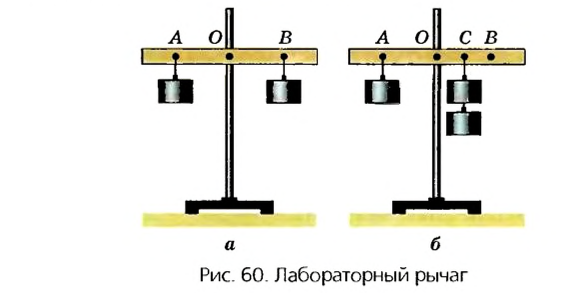
Для этого возьмем деревянную планку с отверстием посередине и поместим ее на оси, закрепленной в штативе (рис. 60). Это и будет рычаг. Слева от оси вращения повесим в точке А на расстоянии 10 см гирьку массой 102 г. В этом случае говорят, что точка А является точкой действия силы 1 Н. Под действием этой силы рычаг начнет вращаться против часовой стрелки. Для того чтобы он не вращался и оставался в горизонтальном положении, на другом конце рычага найдем такую точку В, при закреплении в которой гирьки массой 102 г рычаг перестанет вращаться. Измерив расстояние ОВ, увидим, что оно также равно 10 см. Таким образом, OA = ОВ, если Fl = F2. Если направление действия силы перпендикулярно к направлению оси вращения рычага, то расстояние от его оси вращения к направлению действия силы называют плечом силы.
Если силы, действующие на рычаг, находящийся в равновесии, равны, то равны и плечи этих сил.
Если левую гирьку оставить прикрепленной в точке А, а в точке В подвесить две такие гирьки массой по 102 г каждая, то равновесие рычага нарушится и он начнет вращаться. Достигнуть равновесия в этом случае можно, изменяя положение точки подвеса двух гирек. Так можно установить новое положение точки подвеса С. Измерив оба плеча, увидим, что правое плечо ОС в два раза меньше левого плеча OA.

В случае равновесия рычага плечо большей силы меньше, и наоборот, плечо меньшей силы больше.
Используя свойства пропорции, получаем

В уравновешенном рычаге плечи сил обратно пропорциональны силам.
Что такое момент силы
Физическую величину, равную произведению силы на плечо, называют моментом силы. Единицей измерения момента силы является ньютон-метр (Н-м).
Сформулируем условие равновесия рычага в общем виде.
Рычаг пребывает в равновесии, если момент силы, вращающий рычаг по часовой стрелке, равен моменту силы, вращающему рычаг против часовой стрелки.
Конструктивно рычаг может быть таким, что силы будут действовать по одну сторону от оси вращения. Условие равновесия для него будет такое же, как и для рычага, рассмотренного выше.
Используя условие равновесия рычага, можно рассчитывать силы, действующие на него, или плечи этих сил.
Пример:
На одно из плеч рычага длиной 30 см действует сила 2 Н. Какая сила должна подействовать на другое плечо этого рычага длиной 15 см, чтобы он оставался неподвижным.
Дано:
Решение
При условии равновесия рычага  Отсюда
Отсюда

Ответ. На второе плечо рычага должна подействовать сила 4 Н.
Где используют рычаги
Рычаг известен человеку с того времени, когда человек взял палку, чтобы сбить плод с дерева. И вся следующая история человечества связана с использованием рычагов. Так, исследования историков показывают, что при строительстве пирамид древние египтяне использовали рычаги для поднятия тяжелых блоков на значительную высоту (рис. 61). Историкам науки известно, что древние римляне использовали рычаги для создания различных строительных и военных машин (рис. 62). Значительный вклад в теорию рычагов внес древнегреческий ученый и изобретатель Архимед. Сконструированные им машины помогали оборонять греческие города от захватчиков, подавать воду для орошения полей (рис. 63), перемещать значительные грузы на стройках, выполнять большое количество других подобных работ.

Рычаги широко используются и в современной технике, в самых разнообразных машинах.
Рычагом является стрела подъемного крана, используемого в строительстве. Она дает возможность получить выигрыш в силе или расстоянии. Момент силы, действующей на конце стрелы при подъеме груза, уравновешивается моментом противовеса, находящегося на противоположном конце стрелы.
Принцип рычага используется во многих устройствах и инструментах, которыми мы пользуемся ежедневно. На рисунке 64 изображены некоторые из них. На них легко найти части, исполняющие роль рычагов.
Рычаги можно найти и в живых организмах. По принципу рычага работают руки человека (рис. 65), ноги, голова.

 Архимед (около 287-212 гг. до н. э.) — известный древнегреческий ученый. Научные труды касаются математики, механики, физики и астрономии. Автор многих изобретений и открытий, в том числе машины для орошения полей, винта, рычагов, блоков, военных метательных машин и пр. В его труде «О плавающих телах» изложены основы гидростатики.
Архимед (около 287-212 гг. до н. э.) — известный древнегреческий ученый. Научные труды касаются математики, механики, физики и астрономии. Автор многих изобретений и открытий, в том числе машины для орошения полей, винта, рычагов, блоков, военных метательных машин и пр. В его труде «О плавающих телах» изложены основы гидростатики.
Условие равновесия рычага и момент силы
Как уже отмечалось, рычаг — твёрдое тело, которое может вращаться около неподвижной опоры. Его применяют для изменения направления и значения силы, например для уравновешивания большой силы малой. Рычаг имеет следующие характеристики
(рис. 202).
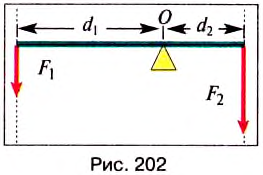
Точка приложения силы — это точка, в которой на рычаг действует другое тело.
Ось вращения — прямая, проходящая через неподвижную точку опоры рычага О, и вокруг которой он может свободно вращаться. Рассмотрим случай, когда ось вращения расположена между точками приложения сил  и
и  .
.
Линия действия силы — это прямая, вдоль которой направлена сила.
Плечо силы — кратчайшее расстояние от оси вращения тела О до линии действия силы. Плечо силы обозначается буквой d. Единицей плеча силы в СИ является один метр (1 м).
Опыт. Возьмём рычаг, подобный изображённому на рис. 203. На расстоянии 10 см от оси вращения подвесим к нему 6 грузиков, каждый массой по 100 г. Чтобы уравновесить рычаг двумя такими же грузиками, нам придётся их подвесить с другой стороны рычага, но на расстоянии 30 см.
Следовательно, для того чтобы рычаг находился в равновесии, нужно к длинному плечу приложить силу, во столько раз меньшую, во сколько раз его длина больше длины короткого плеча. Такое правило рычага описывают формулой обратно пропорциональной зависимости:  ,
,
где  и
и  — силы, действующие на рычаг;
— силы, действующие на рычаг;  и
и  — плечи соответствующих сил. Поэтому правило (условие) равновесия рычага можно сформулировать так.
— плечи соответствующих сил. Поэтому правило (условие) равновесия рычага можно сформулировать так.
Рычаг находится в равновесии тогда, когда значения сил, действующих на него, обратно пропорциональны плечам этих сил.
С тех пор, когда Архимед установил правило рычага, оно просуществовало в первозданном виде почти 1900 лет. И лишь в 1687 г. французский учёный П. Вариньон придал ему более общую форму, используя понятие момента силы.
Момент силы М— это физическая величина, значение которой опре-Г деляется произведением модуля силы F, вращающей тело, и ее плеча d :  .
.
Единицей момента силы в СИ является один ньютон-метр (1 Н • м), равный моменту силы 1 Н, приложенной к плечу 1 м.
Докажем, что рычаг находится в равновесии под действием двух сил, если значение момента М1 силы, вращающей рычаг против часовой стрелки, равно значению момента М2 силы, вращающей его по часовой стрелке, т.е.: 
Из правша рычага  на основе свойства пропорции вытекает
на основе свойства пропорции вытекает
равенство: . Но
. Но  — момент силы, вращающей рычаг против часовой стрелки (рис. 202),
— момент силы, вращающей рычаг против часовой стрелки (рис. 202), — момент силы, вращающей рычаг по часовой стрелке. Таким образом:
— момент силы, вращающей рычаг по часовой стрелке. Таким образом:  ,
,
что и требовалось доказать. Итак, правило (условие) равновесия рычага можно ещё сформулировать так.
Рычаг находится в равновесии под действием двух сил, если значение момента силы, вращающей рычаг против часовой стрелки, равно значению момента силы, вращающей его по часовой стрелке.
Момент силы — важная физическая величина, она характеризует действие силы, показывает, что оно зависит и от модуля силы, и от её плеча. Например, мы знаем, что действие силы на дверь зависит и от модуля силы, и оттого, где приложена сила: дверь тем легче повернуть, чем дальше от оси вращения приложена сила, действующая на неё; гайку легче открутить длинным гаечным ключом, чем коротким; ведро тем легче вытянуть из колодца, чем длиннее ручка ворота.
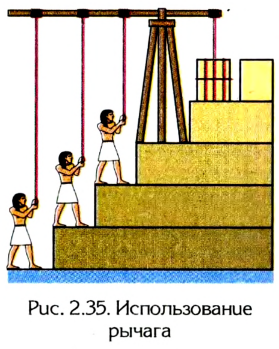
Основы статики и равновесие рычага
Еще в давние времена люди использовали обычную палку в качестве рычага, выигрывая этим в силе. На рисунке 2.35 показано, как с помощью рычага можно поднять по ступенькам большие каменные глыбы, например для строительства пирамид.
В древних книгах по механике, написанных учеными Греции и Египта, главным образом рассматривались вопросы статики. Важнейшие открытия в этой области принадлежали великому греческому философу Аристотелю, который и дал название «механика» науке, изучающей простейшие движения материальных тел, находящихся в природе или создающихся людьми в процессе их деятельности.
Ученые уже тогда понимали значение статики как одной из основных составляющих фундамента механики. Дальнейшее развитие науки и, особенно, техники подтвердило правильность их вывода: действие огромного количества £ механизмов и машин базируется на законах о равновесии сил.
Аристотель (384-322 до н. э.) — один из известнейших ученых Древней Греции. Изучал вопросы ста-тики, разработал классификацию механических движений, сформулировал закон прямолинейного распространения света, объяснил природу атмосферных явлений и др.
Основы науки о равновесии были заложены еще Архимедом. Именно он ввел в физику такое понятие, как центр тяжести и момент силы относительно точки и оси, определил положение центра тяжести для многих тел и фигур, математически обосновал законы рычага, сформулировал правила приложения параллельных сил.
- Заказать решение задач по физике
В своей работе «О равновесии плоских фигур» Архимед опирался на положения, которые считал само собой разумеющимися:
Архимед (287-212 до н. э.) — древнегреческий физик, математик, исследователь, инженер. Изучал условия равновесия тел, простые механизмы, плавание тел и др. Установил, что соотношение длины любой окружности к ее диаметру (число  ) колеблется между
) колеблется между  и
и  (3,142 — 3,140); на то время это были точные данные.
(3,142 — 3,140); на то время это были точные данные.
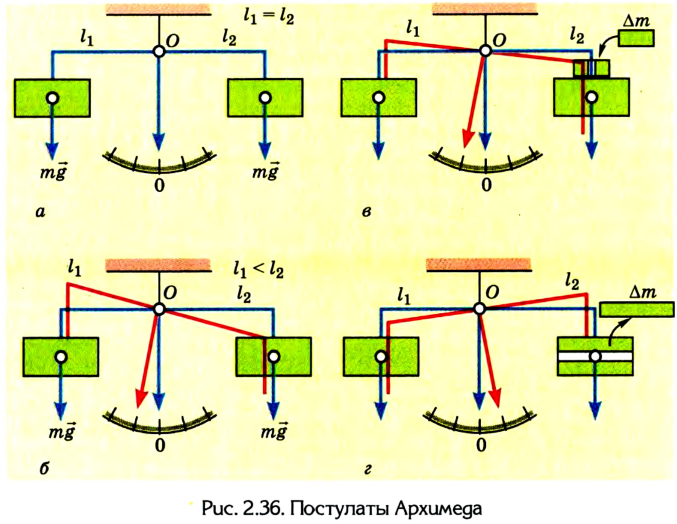
- одинаковые грузы, приложенные к одинаковым плечам рычага, уравновешиваются (рис. 2.36, а);
- одинаковые грузы, приложенные к неодинаковым плечам рычага, не находятся в равновесии; груз, приложенный к более длинному рычагу, падает (рис. 2.36, б);
- если грузы, подвешенные к неодинаковым плечам рычага, уравновешиваются и к одному из них что-либо прибавить, то равновесие нарушится и этот груз будет падать (рис. 2.36, в);
- если при тех же условиях, что в предыдущем случае, один груз уменьшить, то равновесие нарушится, и тогда другой груз будет падать (рис. 2.36, г).
Рычаг находится в равновесии, если плечи сил обратно пропорциональны значениям сил, действующих на него

Из этих положений Архимед сделал вывод: грузы пребывают в равновесии, когда плечи рычага обратно пропорциональны грузам:
Условия равновесия тел. Устойчивое и неустойчивое равновесие
Равновесие — состояние тела, при котором в рассматриваемой системе отсчета отсутствуют перемещения каких-либо его точек под действием приложенных к нему сил.
Вспомним, что момент силы относительно какой-либо оси равен произведению модуля силы на ее плечо: М = Fl. Плечом силы l называется кратчайшее расстояние от оси вращения до линии действия данной силы. Момент силы считается положительным, если сила стремится повернуть тело по часовой стрелке, и отрицательным, если такое действие противоположно. Для равновесия тел необходимы два условия: 1) геометрическая сумма приложенных к телу сил равна нулю: 
2) алгебраическая сумма моментов сил относительно любой неподвижной оси равна нулю: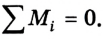
Момент силы: М = Fl.
Условия равновесия тел:

Равновесие устойчивое, если при незначительном смещении тело вновь возвращается в положение равновесия (рис. 2.37).
При неустойчивом равновесии незначительное смещение тела вызывает в дальнейшем значительное удаление его от исходного положения (рис. 2.38).
Равновесие тела может быть устойчивым, неустойчивым и безразличным.

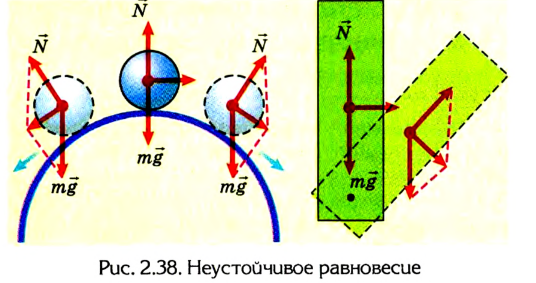
Если любые смещения тела не нарушают его состояния равновесия, то можно говорить о безразличном равновесии (рис. 2.39).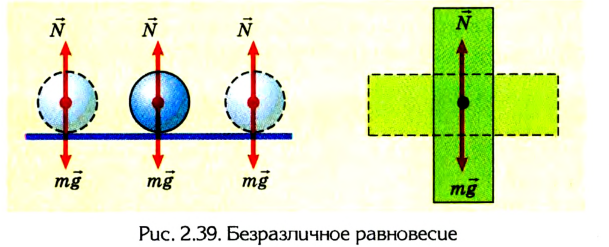
Примеры решения задач на равновесие рычага
Рассмотрим примеры решения задач статики.
Пример №1
Метровая линейка, весом которой можно пренебречь, положена средним делением на подставку и нагружена гирями (рис. 2.40). Какого направления и значения сила должна быть приложена на делении 1 м для того, чтобы линейка находилась в равновесии? Какой будет сила реакции опоры, если приложить эту силу?
Решение:
Выполняем рисунок в соответствии с условием задачи (рис. 2.41), указав силы и их плечи. Линейка под действием моментов сил может вращаться вокруг неподвижной оси О, которая проходит через точку О. Будем считать положительными все моменты, вращающие систему по часовой стрелке. В задаче это момент силы  Отрицательные моменты создают силы
Отрицательные моменты создают силы 
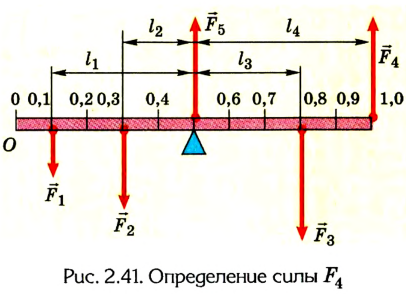
Для упрощения вычислений значение ускорения свободного падения будем считать равным 10 

Предположим, что для равновесия системы на конце линейки 1 м должна быть приложена сила  направленная вертикально вверх. Если же мы ошиблись в выборе направления этой силы, то в ответе значение силы получится со знаком «-«. Для решения задачи воспользуемся вторым условием равновесия тела:
направленная вертикально вверх. Если же мы ошиблись в выборе направления этой силы, то в ответе значение силы получится со знаком «-«. Для решения задачи воспользуемся вторым условием равновесия тела:
Ответ: = 3,2H, направление силы выбрано правильно.
= 3,2H, направление силы выбрано правильно.
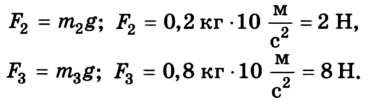
Пример №2
Метровая линейка, весом которой можно пренебречь, положена крайними точками на две опоры и нагружена гирями, как в предыдущей задаче. Нужно определить силы реакции опор  (рис. 2.42).
(рис. 2.42).
Решение:
Чтобы определить силу реакции опоры  можно воспользоваться таким приемом. Если опору забрать, то для равновесия системы на отметке 1 м необходимо приложить силу, направленную вертикально вверх. Иначе система будет вращаться вокруг оси в точке О линейки по часовой стрелке. Теперь можно применить правило моментов:
можно воспользоваться таким приемом. Если опору забрать, то для равновесия системы на отметке 1 м необходимо приложить силу, направленную вертикально вверх. Иначе система будет вращаться вокруг оси в точке О линейки по часовой стрелке. Теперь можно применить правило моментов:
Чтобы определить силу реакции опоры  действуем аналогично. Теперь система будет вращаться вокруг оси против часовой стрелки, когда она проходит через отметку 1 м:
действуем аналогично. Теперь система будет вращаться вокруг оси против часовой стрелки, когда она проходит через отметку 1 м:
Чтобы найти силы реакции опор, можно воспользоваться правилом сложения параллельных сил. Им же можно пользоваться и для контроля найденных значений.
Ответ:  = 3,9 H;
= 3,9 H;  =7,1 Н.
=7,1 Н.

Оригинальный метод решения задач статики был предложен Симоном Сте-вином (1548-1620). Для случаев равновесия тел на наклонной плоскости он доказал, что массы тел соотносятся как длины плоскостей, которые их образуют (рис. 2.43):
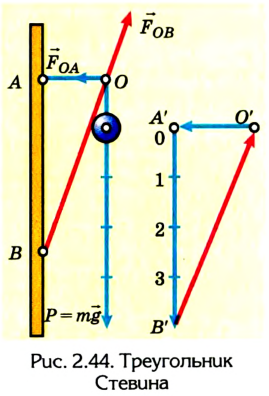
Он же установил принцип сложения статических сил (треугольник сил): три силы, действующие на одну точку, находятся в равновесии тогда, когда они бывают параллельны и пропорциональны трем сторонам плоского треугольника (рис. 2.44). Приведем пример решения одной из задач статики с применением треугольника сил.
Пример №3
На кронштейне висит лампа весом 4 Н. Найти значение сил упругости в деталях ОА и ОВ.
Дано:
Р = 4 Н
 — ?
— ?
Решение:
Выбираем масштаб построения треугольника. Пусть 1 см на рисунке соответствует значению силы 1 Н. Теперь строим сторону треугольника
А’В’, длина которой известна: 4 см = 4 Н. Эта сторона параллельна направлению силы тяжести, действующей на лампу. Из точки А’ проводим линию, параллельную направлению действия силы в подвесе ОА, а потом из точки В’ — параллельную направлению действия силы в упоре ОВ. На пересечении линий находится точка О’. Таким образом мы получили замкнутый треугольник сил. Зная масштаб, при помощи линейки измеряем значения силы упругости в подвесе ОА (О’А’) и силы реакции в упоре ОВ (О’В’).
- Блоки в физике
- Движение тела под действием нескольких сил
- Наклонная плоскость в физике
- Давление газов и жидкостей
- Равнодействующая сила и движение тела под действием нескольких сил
- Сила давления в физике и единицы давления
- Механическое давление в физике
- Столкновения в физике
Внимание! Администрация сайта rosuchebnik.ru не несет ответственности за содержание методических разработок, а также за соответствие разработки ФГОС.
- Участник: Вавилина Екатерина Анатольевна
- Руководитель: Завершинская Ирина Андреевна
В учебнике физики Перышкина А.В. за 7 класс в §19 мы найдем определение массы. Масса тела – это физическая величина, которая характеризует его инертность.
А в § 26 найдем определение веса. Вес тела – это сила, с которой тело вследствие притяжения к Земле действует на опору или подвес.
Масса измеряется в килограммах, а вес в ньютонах.
В 7 классе мы начали изучать физику по УМК Перышкина А.В.
Я спешила познакомиться с этой наукой, потому, что моя мама закончила физический факультет Куйбышевского государственного университета. Она всегда говорит, что физика – это очень интересно и очень увлекательно!
Сейчас я учусь в 9 классе, скоро экзамены. На ОГЭ, кроме математики и русского языка, я выбрала физику. Физика, действительно, очень интересная, увлекательная наука, но и сложная.
В повседневной жизни многие физические понятия используются неверно. Например, очень часто можно услышать: «Мой вес 40 килограмм» или «Этот тортик весит полкило». Но, вес и масса – это два разных понятия! Их нельзя путать.
В учебнике физики Перышкина А.В. за 7 класс в §19 мы найдем определение массы. Масса тела – это физическая величина, которая характеризует его инертность.
А в § 26 найдем определение веса. Вес тела – это сила, с которой тело вследствие притяжения к Земле действует на опору или подвес.
Масса измеряется в килограммах, а вес в ньютонах.
Масса – это вещь постоянная. Массу можно изменить, если от тела, например, отломать кусочек. С весом все гораздо сложнее…
В 7 классе, до изучения второго закона Ньютона, в учебнике говорилось, что если тело и опора покоятся или движутся равномерно и прямолинейно, то вес тела равен силе тяжести и определяется по той же формуле:
P = Fт = mg
Но следовало учитывать, что «сила тяжести действует на тело, а значит, приложена к самому телу, а вес действует на опору или подвес, т.е. приложен к опоре».
А в § 2 для дополнительного чтения, мы впервые узнали, что такое невесомость. В состоянии невесомости вес тела равен нулю, а сила тяжести, как и масса тела, нулю не равны.
Удивительно, но в момент прыжка, когда на нас действует только сила тяжести, а сопротивлением воздуха можно пренебречь, то наш вес равен нулю. Можно считать, что мы находимся в невесомости.
А вот в 9 классе в § 11 был введен второй закон Ньютона: ускорение тела прямо пропорционально равнодействующей сил, приложенных к телу, и обратно пропорционально его массе.
 =
= 
И поэтому, вес тела – это результат совместного решения двух уравнений, составленных в соответствии со вторым и третьим законами Ньютона.
Если тело лежит на неподвижной опоре относительно Земли, то на тело действуют сила тяжести направленная вертикально вниз, и сила нормального давления или сила реакции опоры. Силы, действующие на тело, уравновешивают друг друга. В соответствии с третьим законом Ньютона тело действует на опору с некоторой силой – весом, равной по модулю силе реакции опоры и направленной в противоположную сторону. Т.е. вес численно равен силе тяжести, это как раз то, о чем мы говорили в 7 классе.
Если же наше тело, будет находиться в лифте, который движется с ускорением, то вес тела может быть больше или меньше силы тяжести. Результат зависит от направления ускорения.
Таким образом, в физике принято строгое различие понятий веса, силы тяжести и массы. С точки зрения физики, приходя на рынок и обращаясь к продавцу, следовало бы говорить: «Дайте, пожалуйста, десять ньютон клубники». Но все уже привыкли к слову вес, как синониму термина «масса».
Но очень важно понимать, что это вовсе не одно и то же!
Однако, массы некоторых тел очень большие. А человеку часто приходится поднимать, двигать тяжелые предметы. С давних пор человек применяет различные вспомогательные приспособления для облегчения своего труда.
В § 55-56 учебника физики для 7 класса мы познакомились с простыми механизмами и в частности – рычагом.
В нашем современном мире рычаги находят широкое применение как в природе, так и в повседневной жизни, созданной человеком. Практически любой механизм, преобразующий механическое движение, в том или ином виде использует рычаги.
С помощью рычагов три тысячи лет назад при строительстве пирамид в Древнем Египте передвигали и поднимали на большую высоту тяжелые каменные плиты.
Рычаги позволяю получить выигрыш в силе!
Рычаги встречаются в разных частях тела человека и животных. Это, например, конечности, челюсти. Много рычагов можно увидеть в теле насекомых и птиц.
Рычаги так же распространены и в быту. Это и водопроводный кран, и дверь, и различные кухонные приборы
Правило рычага лежит в основе действия рычажных весов, различного рода инструментов и устройств, применяемых там, где требуется выигрыш в силе или в расстоянии.
Рычаг – это твёрдое тело, которое может вращаться вокруг точки опоры. Рычаг находится в равновесии, если сумма моментов сил равна нулю. Момент силы – это величина, равная произведению силы на плечо этой силы. M = Fl. Плечо – это кратчайшее расстояние от точки опоры, до линии, вдоль которой действует сила (перпендикуляр).
Различают рычаги 1 рода, в которых точка опоры располагается между точками приложения сил, и рычаги 2 рода, в которых точки приложения сил располагаются по одну сторону от опоры.
Среди рычагов 2 рода выделяют рычаги 3 рода, с точкой приложения «входящей» силы ближе к точке опоры, чем нагрузки, что даёт выигрыш в скорости и пути
Примеры: рычаги первого рода — детские качели (перекладина), ножницы; рычаги второго рода — тачка (точка опоры — колесо), приподнимание предмета ломом движением вверх; рычаги третьего рода — задняя дверь багажника или капот легковых автомобилей на гидравлических телескопических упорах, подъём кузова самосвала (с гидроцилиндром в центре), движение мышцами рук и ног человека и животных.

Рычаги очень часто встречаются в живой природе.
В скелете животных и человека все кости, имеющие некоторую свободу движения, являются рычагами.
- у человека – кости рук и ног, нижняя челюсть, череп, фаланги пальцев,
- у кошек рычагами являются подвижные когти;
- у многих рыб – шипы спинного плавника;
- у членистоногих – большинство сегментов их наружного скелета.
Рычажные механизмы скелета в основном рассчитаны на выигрыш в скорости при потере в силе. Особенно большие выигрыши в скорости получаются у насекомых.
Для осуществления полета крылья должны иметь особое расположение и возможность свободно двигаться. Крыло насекомых можно сравнить с двуплечим рычагом. Короткое плечо представлено его внутренней частью (основанием), которая скрыта под мембраной, а длинное располагается снаружи: собственно, эту видимую часть и принято считать крылом. На внутренней поверхности экзоскелета, сразу под местом сочленения крыла с телом, находится плотный выступ, который называют плейральным столбиком; данная структура играет роль точки опоры при взмахе крыльев.

Также рычажный механизм есть у цветка шалфея. От оси у тычинок шалфейного цветка отходят два плеча: длинное и короткое. На конце длинного, изогнутого, как у коромысла, плеча висит пыльцевой мешочек. А короткое плечо сплющено, оно-то и закрывает вход в глубину цветка. Потянется шмель своим хоботком к нектару и обязательно толкнет короткое плечо. А оно тотчас приведет в движение длинное плечо — коромысло. То в свою очередь ударяет по спине шмеля своими пыльниками — вот и сработал рычаг.

В скелете животных и человека все кости, имеющие некоторую свободу движения, являются рычагами, например, у человека – кости конечностей, нижняя челюсть, череп, фаланги пальцев.


Однажды я увидела в журнале рисунок, который захотелось использовать для оформления стенгазеты. Но рисунок был очень маленьким, а мне хотелось сохранить масштаб при увеличении его размеров. Я задумалась, как можно увеличить рисунок до нужных размеров. Оказывается, это можно сделать либо вручную «методом клеток», либо с помощью приборов: эпидиаскопа, или пантографа.
Пантограф (название происходит от двух греческих слов (pantos) – все и qrapho – пишу) – прибор в виде раздвижного шарнирного параллелограмма для перерисовки рисунков, чертежей, схем в другом (увеличенном или уменьшенном масштабе). В основе работы этого прибора тоже лежит рычаг. Важной особенностью пантографа является простота его конструкции и очень высокая «точность» скопированного изображения. Но купить пантограф в магазине оказалось делом не простым. Тогда я решила его изготовить самостоятельно.
Пантографы широко используются в технике.
Так одним из основных видов городского транспорта является трамвай. Большинство трамваев используют электротягу с подачей электроэнергии через воздушную контактную сеть с помощью токоприёмников, чаще всего токоприёмник изготовлен в виде пантографов.

Очень часто пантографы используют в мебели. В этом случае пантограф по представляет собой штангу с подъемным механизмом. Обеспечивая легкий доступ к верхнему ярусу, пантограф способствует более эффективному использованию внутреннего пространства шкафа и лучшей организации хранения вещей.

Практическая часть
Прежде чем изготовить пантограф, я изготовила качели – рычаги.
Качели с перемещаемым сиденьем
Всем известны обычные детские качели рычажного типа, когда 2 ребёнка садятся по разным концам качелей и качаются, поочерёдно отталкиваясь от земли ногами. Но дети бывают разного веса. И обычно лёгкий ребёнок сидит наверху, а тяжёлый перевешивает его. Последний должен больше работать ногами, чтобы качели хоть как-то качались. Чтобы уравнять работу обоих, можно сделать перемещаемое сиденье на конструкции качелей. Тогда в зависимости от веса ребёнка подбирается длина рычага и у обоих детей уравниваются возможности и количество отталкиваний от земли в единицу времени.
|
1 модель качелей из конструктора «ЛЕГО»:
|
2 модель:
|


3 модель: При перемещении сидения равновесие снова устанавливается

Изготовление пантографа
Воспользовавшись описанием изготовления пантографа с сайта «Мир самоделок»[5] я купила пластмассовые линейки, болты и гайки и изготовила свой пантограф.





Я изготовила анимационный материал, ссылка на который представлена: https://cloud.mail.ru/home/ВавилинаЕА.mkv
Работая над этим материалом, я не только повторила основные законы, определения. Я узнала много нового о рычагах. Изготовила пантограф и научилась его использовать. Изготовила небольшой анимационный материал.
Пожалуй, самое удивительное, это то, что когда я начала свою работу над проектом для участия во Всероссийском заочном конкурсе для обучающихся «Я учу физику», посвящённого 115-летию А.В. Пёрышкина, я не знала что получится. Оказывается, физические явления вокруг нас словно цепляются друг за друга. Так и хочется сказать: «Все взаимосвязано! А физика самая интересная и увлекательная наука!»
Момент силы. Условия равновесия рычага
- Устройство и виды рычагов
- Момент силы
- Правило моментов для двух сил
- Правило моментов для нескольких сил
- Применение рычагов в быту и технике
- Задачи
- Лабораторная работа №9. Проверка условия равновесия рычага
п.1. Устройство и виды рычагов
 |
Рычаг – это твёрдое тело, которое может вращаться вокруг неподвижной опоры.
Рычаг состоит из перекладины и опоры. Назначение рычага – получить выигрыш в силе или расстоянии. |
В зависимости от взаимного расположения точки опоры и нагрузки различают три вида рычагов.
п.2. Момент силы
Плечо силы – это кратчайшее расстояние между точкой опоры и прямой, вдоль которой сила действует на рычаг.
Чтобы найти плечо силы, нужно из точки опоры провести перпендикуляр на линию действия силы.

На рисунке (l_1) – плечо силы (F_1, l_2) — плечо силы (F_2).
Силы вращают рычаг вокруг точки опоры – по часовой или против часовой стрелки.
Ось вращения проходит через точку опоры перпендикулярно плоскости вращения.
На рисунке сила (F_1) вращает рычаг против часовой стрелки, а сила (F_2) — по часовой стрелке.
Момент силы – это произведение силы, вращающей тело, на её плечо. $$ M=Fl $$ В системе СИ единица измерения момента силы — Н·м.
Момент силы определяется не для всего тела, а для некоторой его точки, удалённой от центра (оси) вращения. Эта величина имеет смысл только для вращающихся тел.
п.3. Правило моментов для двух сил
Правило моментов для двух сил
Рычаг находится в равновесии под действием двух сил, если момент силы, вращающей его по ходу часовой стрелки, равен моменту силы, вращающей его против хода часовой стрелки.
 |
$$ F_1l_1=F_2l_2 $$ |
п.4. Правило моментов для нескольких сил
Правило моментов для нескольких сил
Рычаг находится в равновесии, если сумма моментов всех сил, вращающих его по ходу часовой стрелки, равен сумме моментов всех сил, вращающих его против хода часовой стрелки.
Например:
 |
Силы (F_1, F_2, F_3) вращают рычаг против часовой стрелки, а сила (F_4) — по часовой стрелке. Поэтому: $$ F_1l_1+F_2l_2+F_3l_3=F_4l_4 $$ |
п.5. Применение рычагов в быту и технике
Рычаги первого рода
 Весы Предмет, вес которого нужно измерить, — это нагрузка, а гиря создает усилие. Они равны, так как находятся на одном расстоянии от точки опоры. |
 Рычажные весы Точка опоры смещена относительно центра. Грузило передвигается по основанию, пока не уравновесит взвешиваемый объект. |
 Гвоздодёр Усилие ручки увеличивается плечом и вытаскивает гвоздь. Нагрузкой здесь является сопротивление гвоздя. |
 Ручная тележка Небольшое усилие, прикладываемое к ручкам тележки, позволяет поднимать тяжелый груз. |
 Плоскогубцы Составной рычаг, пара простых рычагов, соединенных в точке опоры. Нагрузка — сопротивление предмета захвату инструментом. |
 Ножницы Составной рычаг первого рода, развивают мощное режущее действие очень близко к месту крепления. Нагрузка — сопротивление материала лезвиям. |
Рычаги второго рода
Рычаги третьего рода
п.6. Задачи
Задача 1. Для каждого положения тела укажите плечо силы. 
При необходимости достраиваем линию действия силы и опускаем на неё перпендикуляр из точки опоры. Этот перпендикуляр и есть искомое плечо.
Задача 2. Грузы уравновешены на рычаге. Отношение плеч рычага 1:5. Масса большего груза 2,5 кг. Найдите массу меньшего груза.
Дано:
(frac{l_1}{l_2}=frac 15)
(m_1=2,5 text{кг})
__________________
(m_2-?)

По правилу моментов begin{gather*} F_1l_1=F_2l_2 end{gather*} На обоих концах рычага действуют силы тяжести: $$ F_1=m_1g, F_2=m_2g $$ Получаем: begin{gather*} m_1gl_1=m_2gl_2\[7pt] m_2=frac{m_1l_1}{l_2} end{gather*} Подставляем: $$ m_2=2,5cdot frac 15=0,5 (text{кг}) $$ Ответ: 0,5 кг
Задача 3. На концах рычага действуют силы 15 Н и 60 Н, направленные вниз. Рычаг находится в равновесии. Расстояние между точками приложения сил 1 м. Где расположена точка опоры?
Дано:
(F_1=15 text{Н})
(F_2=60 text{Н})
(l_1+l_2=1 text{м})
__________________
(l_1, l_2-?)

По правилу моментов begin{gather*} F_1l_1=F_2l_2. end{gather*} Получаем систему уравнений begin{gather*} left{ begin{array}{l l} 15l_1=60l_2 \ l_1+l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=4l_2 \ l_1+l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=4l_2 \ 4l_2+l_2=1 end{array} right. Rightarrow \[7pt] Rightarrow left{ begin{array}{l l} l_1=4l_2 \ 5l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=0,8 \ l_2=0,2 end{array} right. end{gather*} Ответ: 0,8 м от точки приложения первой силы и 0,2 м от точки приложения второй силы.
Задача 4*. К балке, расположенной на двух опорах А и В подвешен груз массой 500 кг. Расстояние от точки подвеса груза к одному из концов балки в 4 раза больше, чем к другому. С какой силой балка давит на каждую из опор? Примите (gapprox 10 text{м/с}^2). Ответ запишите в килоньютонах.
Дано:
(m=500 text{кг})
(gapprox 10 text{м/с}^2)
(OB=4OA)
__________________
(F_A, F_B-?)

Сила тяжести (F_{text{т}}=mg), направленная вниз, уравновешивается силами реакции опор (F_A) и (F_B), направленными вверх. begin{gather*} F_A+F_B=mg end{gather*} По правилу моментов при равновесии begin{gather*} F_Acdot OA=F_Bcdot OB=F_Bcdot 4OARightarrow F_A=4F_B \[7pt] F_A+F_B=5F_B=mgRightarrow F_B=frac{mg}{5} end{gather*} Получаем: begin{gather*} F_B=frac{500cdot 10}{5}=1000 text{Н}=1 text{кН}, F_A=4cdot 100=4000 text{Н}=4 text{кН} end{gather*} Ответ: 4 кН и 1 кН
п.7. Лабораторная работа №9. Проверка условия равновесия рычага
Цель работы
Исследовать условия равновесия рычага под действием двух параллельных сил.
Теоретические сведения
Рычаг – это твёрдое тело, которое может вращаться вокруг неподвижной опоры.
В работе используется рычаг 1-го рода, в котором опора располагается между точками приложения сил.
Плечо силы – это кратчайшее расстояние между точкой опоры и прямой, вдоль которой сила действует на рычаг. Чтобы найти плечо силы, нужно из точки опоры провести перпендикуляр на линию действия силы.
Момент силы – это произведение силы, вращающей тело, на её плечо: (M=Fl).
Правило моментов для двух сил
Рычаг находится в равновесии под действием двух сил, если момент силы, вращающей его по ходу часовой стрелки, равен моменту силы, вращающей его против хода часовой стрелки.
|
begin{gather*} M_1=M_2\[7pt] F_1l_1=F_2l_2 end{gather*} |
В работе используется лабораторный рычаг с отверстиями диаметром 4 мм, находящимися на расстоянии 5 см друг от друга. Отверстий нечетное количество; центральное отверстие (центр тяжести) используется для подвеса рычага на штативе в положении равновесия. Абсолютную погрешность определения плеча на данном рычаге принимаем равной половине диаметра отверстия $$ Delta l=frac D2=2 text{мм} $$
Для измерения веса груза используется динамометр с ценой деления $$ d=0,1 text{Н}. $$
Абсолютная погрешность определения веса $$ Delta_F=frac d2=0,05 text{Н}. $$
Относительные погрешности измерений: $$ delta_l=frac{Delta_l}{l}, delta_F=frac{Delta_F}{F}, delta_M=delta_l+delta_F $$
Абсолютная погрешность определения момента силы $$ Delta_M=Mcdot delta_M $$
Погрешности определения отношений сил и плечей: begin{gather*} r_F=frac{F_1}{F_2}, delta_{rF}=frac{Delta_F}{F_1}+frac{Delta_F}{F_2}, Delta_{rF}=frac{F_1}{F_2}cdot delta_{rF}\[7pt] r_l=frac{l_2}{l_1}, delta_{rF}=delta_{rl}frac{Delta_l}{l_1}+frac{Delta_l}{l_2}, Delta_{rl}=frac{l_2}{l_1}cdot delta_{rl} end{gather*}
Приборы и материалы
Лабораторный рычаг, штатив, стержень, динамометр, набор грузов.
Ход работы
1. Закрепите стержень в штативе, наденьте на него рычаг. Если стержень проходит через центральное отверстие рычага, он находится в равновесии.
2. Подвесьте три груза на динамометре, запишите их вес (F_1).
3. Подвесьте грузы слева от оси вращения рычага на расстоянии 5 см.
4. С помощью динамометра определите, какую силу нужно приложить на расстоянии 15 см справа от оси вращения, чтобы удерживать рычаг в равновесии.
5. Как направлены в этом случае силы, действующие на рычаг? Запишите длину плеч этих сил.
6. Найдите моменты сил (M_1) и (M_2), их относительные и абсолютные погрешности.
7. Вычислите отношение сил (frac{F_1}{F_2}) и плеч (frac{l_2}{l_1}) для этого случая, погрешности их определения.
8. Сделайте выводы.
Результаты измерений и вычислений
| (F_1, text{Н}) | (l_1, text{см}) | (F_2, text{Н}) | (l_2, text{см}) | (F_1/F_2) | (l_2/l_1) |
| 2,9 | 5 | 1,0 | 15 | 2,9 | 3,0 |
Погрешности прямых измерений: $$ Delta_l=2 text{мм}=0,2 text{см}, Delta_F=0,05 text{Н} $$ Найдем моменты сил и погрешности вычислений: begin{gather*} M_1=F_1cdot l_1=2,9cdot 5=14,5 (text{Н}cdot text{м})\[7pt] delta_{M1}=frac{Delta_l}{l_1}+frac{Delta_F}{F_1}=frac{0,2}{5}+frac{0,05}{2,9}approx 0,04+0,017=0,057=5,7text{%} \[7pt] Delta_{M1}=M_1cdot delta_{M1}=14,5cdot 0,057approx 0,8 (text{Н}cdot text{м})\[7pt] M_1=(14,5pm 0,8) text{Н}cdot text{м}\[7pt] \[7pt] M_2=F_2cdot l_2=1,0cdot 15=15,0 (text{Н}cdot text{м})\[7pt] delta_{M2}=frac{Delta_l}{l_2}+frac{Delta_F}{F_2}=frac{0,2}{15}+frac{0,05}{1,0}approx 0,013+0,05=0,063=6,3 text{%} \[7pt] Delta_{M2}=M_2cdot delta_{M2}=15,0cdot 0,063approx 0,9 (text{Н}cdot text{м})\[7pt] M_2=(15,0pm 0,9) text{Н}cdot text{м} end{gather*} Таким образом, с учетом вычисленных погрешностей: $$ M_1=M_2 $$
Погрешность вычислений для (frac{F_1}{F_2}) begin{gather*} delta_{rF}=frac{Delta_F}{F_1}+frac{Delta_F}{F_2}=frac{0,05}{2,9}+frac{0,05}{1,0}approx 0,017+0,05=0,067=6,7text{%}\[7pt] Delta_{rF}=frac{F_1}{F_2}cdot delta_{rF}=2,9cdot 0,067approx 0,2\[7pt] frac{F_1}{F_2}=2,9pm 0,2 end{gather*}
Погрешность вычислений для (frac{l_2}{l_1}) begin{gather*} delta_{rl}=frac{Delta_l}{l_1}+frac{Delta_l}{l_2}=frac{0,2}{5}+frac{0,2}{15}approx 0,04+0,013=0,053=5,3text{%}\[7pt] Delta_{rl}=frac{l_2}{l_1}cdot delta_{rl}=3,0cdot 0,053approx 0,2\[7pt] frac{l_2}{l_1}=3,0pm 0,2 end{gather*} Таким образом, с учетом вычисленных погрешностей: $$ frac{F_2}{F_2}=frac{l_2}{l_1} $$
Выводы
На основании проделанной работы можно сделать следующие выводы.
Моменты сил, приложенных слева и справа от оси вращения рычага, равны $$ M_1=(14,5pm 0,8) text{Н}cdot text{м}, M_2=(15,0pm 0,9) text{Н}cdot text{м} $$ Таким образом, с учетом вычисленных погрешностей, (M_1=M_2) — правило моментов выполняется.
Отношения сил и плечей равны begin{gather*} frac{F_1}{F_2}=2,9pm 0,2, frac{l_2}{l_1}=3,0pm 0,2 end{gather*}
Таким образом, с учетом вычисленных погрешностей (frac{F_1}{F_2}=frac{l_2}{l_1}) — правило отношений выполняется.
Эксперименты подтвердили условие равновесия рычага.
Тип 4 № 4062 

i
 Масса первого груза равна 10 кг, масса второго — 2 кг (см. рис.). Какова масса рычага?
Масса первого груза равна 10 кг, масса второго — 2 кг (см. рис.). Какова масса рычага?
Спрятать решение
Решение.
Видеорешение: https://youtu.be/hCHwsCuRNFw?t=1069
Ответ: 5 кг.
Источник: Ненашев И. Ю. Сборник задач по физике для 8 класса, Х.: «Веста», 2010 (№ 13.19)