Преобразование
электрической энергии в механическую
в двигателе связано с потерями энергии,
поэтому полезная мощность на выходе
двигателя Р2
всегда меньше потребляемой мощности
P1
на величину
потерь
|
|
(7.3) |
Потери
разделяются на основные и добавочные.
Основные
потери включают в себя магнитные,
электрические и механические.
Магнитные
потери Pм
в
асинхронном двигателе вызваны потерями
на гистерезис и потерями на вихревые
токи, происходящими в сердечнике ротора
и статора при его перемагничивании.
Величина магнитных потерь пропорциональна
частоте перемагничивания
|
|
(7.4) |
Частота
перемагничивания сердечника статора
равна f=50
Гц,
соответственно, магнитные потери в
сердечнике статора значительны, а
частота перемагничивания сердечника
ротора при номинальном скольжении
составляет f=50∙s
= (2…4)Гц
и магнитные потери в сердечнике ротора
малы, которые на практике не учитывают.
Электрические
потери
вызваны
нагревом обмоток статора и ротора
проходящими по ним токами:
|
|
(7.5) |
где
r1
и r2
–
сопротивления обмоток фаз статора и
ротора; m
– число фаз.
В
асинхронных двигателях с фазным ротором
дополнительно имеются электрические
потери в щеточном контакте.
Механические
потери Рмех
— это потери
на трение в подшипниках и на вентиляцию.
Величина этих потерь пропорциональна
квадрату частоты вращения ротора
|
|
(7.6) |
В
двигателях с фазным ротором механические
потери происходят еще и за счет трения
между щетками и контактными кольцами
ротора.
Добавочные
потери
включают в себя все виды трудноучитываемых
потерь, вызванных пульсацией магнитной
индукции в зубцах и другими причинами.
В соответствии с ГОСТом добавочные
потери асинхронных двигателей принимают
равными 0,5% от подводимой к двигателю
мощности Р1.
Таким
образом, часть подводимой к двигателю
мощности затрачивается в статоре на
магнитные РМ
и электрические потери РЭ1.
Оставшаяся электромагнитная мощность
РЭМ
передается на ротор, где расходуется
на электрические потери РЭ2
и преобразуется в полную механическую
мощность. Часть этой мощности идет на
покрытие механических и добавочных
потерь,
а оставшаяся мощность Р2
– полезная
мощность двигателя.
Электрические
потери в обмотках являются переменными
потерями, так как их величина зависит
от нагрузки двигателя, то есть от
значений токов в обмотках статора и
ротора. Переменными являются и добавочные
потери. Магнитные и механические потери
практически не зависят от нагрузки.
Коэффициент
полезного действия асинхронного
двигателя определяется
|
|
(7.7) |
С
изменениями нагрузки КПД меняет свою
величину: в режиме холостого хода КПД
равен нулю, а с ростом нагрузки КПД
увеличивается, достигая максимума при
нагрузке равной (0,7÷0,8)Рном.
КПД
трехфазных асинхронных двигателей
общего назначения при номинальной
нагрузке составляет: для двигателей
мощностью от 1 до 10 кВт η=
75÷88 %, а для двигателей мощностью более
10 кВт η
= 90÷94 %.
Коэффициент
полезного действия один из основных
параметров асинхронного двигателя,
который определяет его энергетические
свойства — экономичность в процессе
эксплуатации. Кроме того, КПД двигателя,
а точнее величина потерь в нем,
регламентирует температуру нагрева
его основных частей и в первую очередь
обмотки статора. По этой причине
двигатели с низким КПД (при одинаковых
условиях охлаждения) работают при более
высокой температуре нагрева обмотки
статора, что ведет к снижению их
надежности и долговечности.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
ПРАКТИЧЕСКАЯ РАБОТА №7
«Расчет потерь и КПД асинхронного
двигателя»
ЦЕЛЬ РАБОТЫ: рассчитать значение потребляемой мощности АД, величину
переменных, добавочных и суммарных его потерь АД, значение КПД двигателя и его
нагрузку при этом КПД.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ:
Преобразование электрической энергии в механическую в
асинхронном двигателе, как и в других электрических машинах, связано с потерями
энергии, поэтому полезная мощность на выходе двигателя Р2 всегда
меньше мощности на входе (потребляемой мощности) Р1 на величину
потерь ![]() Р :
Р :
Р2 = Р1
— ![]() Р (7.1)
Р (7.1)
Потери ![]() Р
Р
преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в
электрических машинах разделяются на основные и добавочные. Основные потери
включают в себя магнитные, электрические и механические.
Магнитные потери Рм в асинхронном двигателе
вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в
сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна
частоте перемагничивания Рм = f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника
статора равна частоте тока в сети (f = f1), а частота перемагничивания
сердечника ротора f = f2 =f1s.При частоте тока в сети f 1 = 50 Гц при номинальном
скольжении sном = 1 ÷ 8 %
частота перемагничивания ротора f = f2 = 2 ÷ 4 Гц,
поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических
расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны
нагревом обмоток статора и ротора проходящими по ним токами. Величина этих
потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1 ; (7.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1 (7.3)
Здесь r1 и r2 — активные
сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру
Θраб (см. § 8.4):
r1 = r1.20 [1 + α (Θраб — 20)]; r2 = r2.20 [1 + α (Θра6
— 20)], (7.4)
где r1.20 и r2.20 — активные
сопротивления обмоток при температуре Θ1 = 20 °С; α — температурный
коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо
пропорциональны скольжению:
Рэ2 = s Рэм (7.5)
где Рэм
— электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 = (Рм + Рэ1) (7.6)
Из (7.5) следует, что работа асинхронного
двигателя экономичнее при малых скольжениях, так как с ростом скольжения
растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных
электрических потерь имеют место еще и электрическиe
потери в щеточном контакте Рэ.щ = 3 I2 ΔUщ /2, где Uщ =2,2 В — переходное падение напряжения на
пару щеток.
Механические потери Рмех — это потери на трение
в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату
частоты вращения ротора (Рмех = n22). В асинхронных двигателях с фазным
ротором механические потери происходят еще и за счет трения между щетками и
контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь,
вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах
и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных
двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005
Р1. (7.7)
При расчете добавочных потерь для
неноминального режима следует пользоваться выражением
Р′доб
= Рдоб β2 (7.8)
 где β = I1/ I1ном —коэффициент нагрузки.
где β = I1/ I1ном —коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
![]() P = Рэм + Рэ1 + Рэ2 + Рмех +
P = Рэм + Рэ1 + Рэ2 + Рмех +
Рдоб. (7.9)
На рис. 7.1 представлена энергетическая диаграмма
асинхронного двигателя, из которой видно, что часть подводимой к двигателю
мощности Р1 = m1 U1 I1 cos φ1
затрачивается в статоре на магнитные Ры и электрические Рэ1
потери. Оставшаяся после этого электромагнитная мощность Рэм передается
на ротор, где частично расходуется на электрические потери Рэ2 и
преобразуется в полную механическую мощность Р′2. Часть мощности
идет на покрытие механических Рмех и добавочных потерь Рдоб,
а оставшаяся часть этой мощности Р2
составляет полезную мощность двигателя.
Рис.
7.1. Энергетическая диаграмма
асинхронного
двигателя
У асинхронного двигателя КПД : η = Р2/ Р1
=1 — ![]() P.
P.
(7.10)
Электрические потери в обмотках РЭ1 и РЭ2
являются переменными потерями, так как их величина зависит от нагрузки двигателя,
т. е. от значений токов в обмотках статора и ротора. Переменными являются
также и добавочные потери (7.8). Что же касается магнитных Рм и
механических Рмех, то они практически не зависят от нагрузки
(исключение составляют двигатели, у которых с изменением нагрузки в широком
диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с
изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД
равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при
нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД
незначительно снижается, а при перегрузке (P2 > Рном) он резко убывает, что объясняется интенсивным
ростом переменных потерь (Рэ1 + Рэ2 + Рдоб),
величина которых пропорциональна квадрату тока статора, и уменьшением
коэффициента мощности.
КПД трехфазных асинхронных двигателей общего назначения при
номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном
= 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном =90 ÷ 94%.
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
1.
Решить задачу №1. Трехфазный
асинхронный двигатель с числом полюсов 2![]() = 4 включен в сети
= 4 включен в сети
напряжением 380 B, частотой 50 Гц при соединении обмотки
статора «треугольником». В табл. 7.1. приведены параметры
двигателя, соответствующие его номинальной нагрузке: мощность двигателя Pном , КПД ƞном , коэффициент
мощности cosα1. При
нагрузке Р2 = 0,85Рном КПД двигателя имеет наибольшее
значение ƞмах = 1,03ƞном. Необходимо определить все
остальные виды потерь двигателя для режима номинальной нагрузки.
Таблица 7.1.
|
Параметр |
Варианты |
|||||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
Рном,кВт |
3,0 |
4,0 |
5,5 |
7,5 |
11 |
15 |
18,5 |
22 |
30 |
37 |
|
ŋном,% |
81,5 |
82 |
85 |
85,5 |
86 |
87,5 |
88 |
90 |
90,5 |
91 |
|
Sном,% |
5,5 |
5,0 |
4,0 |
3,3 |
3,0 |
3,0 |
2,7 |
2,5 |
2,3 |
2,0 |
|
сos |
0,76 |
0,80 |
0,82 |
0,84 |
0,86 |
0,87 |
0,89 |
0,89 |
0,90 |
0,90 |
Решение.
— определить
наибольшее значение КПД: Ƞмах = 1,03ƞмах ;
— определить
величину нагрузки двигателя при этом КПД: Р2 = 0,85 Рном;
— определить
потребляемую мощность при ƞмах: Р1 = Р2/ ƞмах
;
— определить суммарные
потери при ƞмах: ![]() Р = Р1
Р = Р1
– Р2, где Р1 = P1ном
, а Р2=Pном;
— определить
величину постоянных потерь двигателя: Рпост = Рм + Рмех
= 0,5∑Р;
— определить
потребляемую мощность в номинальном режиме: Р1ном = Рном
/ ƞном ;
— определить
величину суммарных потерь в номинальном режиме: ∑Рном = Р1ном
– Рном;
— определить
величину переменных потерь в номинальном режиме:
Рпер = Рэ + Рдоб = ∑Рном
– Рпост ;
— определить
момент в режиме холостого хода: М0 = 9,55Рпост/ƞ1
;
— определить
номинальную частоту вращения: nном = n1 ( 1 – sном) ;
— определить
полезный момент на валу двигателя при номинальной нагрузке:
М2 = 9,55Рном / nном;
— определить
электромагнитный момент при номинальной нагрузке: Мном = М2
+ М0;
— определить
номинальное значение электромагнитной мощности: Рэм = 0,105Мномn1
;
— определить
величину электрических потерь в обмотке ротора: Рэ2 = sном Рэм ;
— определить
величину добавочных потерь: Рдоб = 0,005Р1ном ;
— определить
величину электрических потерь в номинальном режиме: Рэ = Рпер
– Рдоб ;
— определить
величину электрических потерь в обмотке статора: Рэ1 = Рэ –
Р э2 ;
— выполнить
проверку: ∑Рном = Рпост + Р э1 + Рэ2
+ Рдоб
2.
Решить задачу №2. В табл. 7.2 приведены технические
данные трехфазных асинхронных двигателей с фазным ротором серии 4АК. Требуется
определить все виды потерь при номинальной нагрузке двигателя. Напряжение
питания 660 В, обмотка статора соединения «Звездой»; частота тока 50 Гц;
кратность пускового тока ʎi = 5,7; коэффициент мощности короткого
замыкания принять ![]() .
.
Таблица 7.2.

Решение:
— определить
мощность, потребляемую двигателем в номинальном режиме: P1ном = PȠном;
— определить
номинальный ток двигателя: I1ном=P1ном/(m1U1COSα1);
— определить
суммарные потери: ΣP=P1ном—Pном;
— определить
пусковой ток двигателя при прямом включении: I1п= I1n* ʎi;
— определить
сопротивление короткого замыкания двигателя: Zk= U1/I1n;
— определить активную составляющую этого сопротивления: ![]() ,
,
— где  ;
;
— определить
величину электрических потерь
в обмотках статора и ротора в режиме номинальной нагрузки: ![]() ;
;
— определить
величину добавочных потерь:
— определить
величину переменных потерь в
режиме номинальной нагрузки;
— определить
величину постоянных потерь
(магнитных и механических).
3. Решить задачу №3. Используя данные и результаты
решения задачи №2, определить КПД двигателя при значения коэффициента
нагрузки, ![]() и построить график ŋ=
и построить график ŋ=![]()
При определении
значений коэффициента мощности ![]() следует воспользоваться
следует воспользоваться
графиком рис. 3.6, кроме значений при ![]() и 1,1 которые следует
и 1,1 которые следует
принять соответствующими номинальной нагрузке из таблицы технических данных
двигателя.

Рисунок 7.1. График cos
φ1 = f(β) Рисунок 7.2. Зависимость η= f(Р2/Pном)
Решение: постоянные
потери ![]() от нагрузки не зависят, а переменные
от нагрузки не зависят, а переменные
потери ![]() +
+![]() пропорциональны
пропорциональны ![]() .
.
—
определить значение тока в обмотке статора: ![]() ;
;
—
определить коэффициент мощности при β по графику рис. 7.1;
—
определить потребляемую двигателем мощность: ![]() ;
;
—
определить величину переменных потерь: ![]() ;
;
—
определить суммарные потери при конкретном значении β:
Рпост
+ Рпер;
—
определить
полезная мощность P2 при конкретном
значении β;
—
определить
КПД двигателя при конкретном значении β: ![]()
—
определить отношение мощностей![]() ;
;
—
результаты расчета по всем значениям коэффициента
нагрузки представить в виде таблицы (см. табл. 7.3.) и на графике (см. рис.
7.2.).
Таблица 7.3.
|
Параметр |
Значения параметров |
||||
|
β |
0,25 |
0,5 |
0,75 |
1,0 |
1,1 |
|
β2 |
|||||
|
Рпост, л |
|||||
|
cos φ1 |
|||||
|
ΣP, Вт |
|||||
|
I1ном, х1ном» |
|||||
|
Рпер, |
|||||
|
P1, |
|||||
|
Р2, |
|||||
|
η |
|||||
|
P1/ |
4.
Оформить отчет по практической работе.
5.
Ответить на контрольные вопросы.
6.
Сделать вывод о проделанной работе.
КОНТРОЛЬНЫЕ ВОПРОСЫ:
1. С чем связано преобразование электрической энергии в механическую в
асинхронном двигателе?
2. Как различаются между собой полезная мощность на выходе двигателя Р2
и мощность на входе (потребляемой мощности) Р1?
3. Что приводит к нагреву асинхронной машины?
4. На какие два основных вида делятся потери асинхронного двигателя?
5. Охарактеризуйте магнитные потери асинхронного двигателя.
6. Охарактеризуйте электрические потери асинхронного двигателя.
7. Охарактеризуйте механические потери асинхронного двигателя.
8. Какие потери являются переменными и почему?
9. Что относится к добавочным потерям асинхронной машины?
10. Как
меняет свою величину коэффициент полезного действия асинхронного двигателя с
изменениями нагрузки?
11. Какой
КПД у трехфазных асинхронных двигателей общего назначения при номинальной
нагрузке?
Потери и кпд асинхронного двигателя
Преобразование электрической энергии в механическую в асинхронном двигателе, как и в других электрических машинах, связано с потерями энергии, поэтому полезная мощность на выходе двигателя Р2всегда меньше мощности на входе (потребляемой мощности) Р1на величину потерь∑Р :
Р2 = Р1 — ∑Р (13.1)
Потери ∑Р преобразуются в теплоту, что в конечном итоге ведет к нагреву машины. Потери в электрических машинах разделяются на основные и добавочные. Основные потери включают в себя магнитные, электрические и механические.
Магнитные потери Рмв асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь пропорциональна частоте перемагничивания Рм=f β,
где β = 1,3 ÷ 1,5. Частота перемагничивания сердечника статора равна частоте тока в сети (f=f1), а частота перемагничивания сердечника ротораf=f2=f1s.При частоте тока в сетиf1 = 50 Гц при номинальном скольжении sном= 1 ÷ 8 % частота перемагничивания ротораf=f2= 2 ÷ 4 Гц, поэтому магнитные потери в сердечнике ротора настолько малы, что их в практических расчетах не учитывают.
Электрические потери в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке (Вт):
электрические потери в обмотке статора
Рэ1 = m1 I21 r1 ; (13.2)
электрические потери в обмотке ротора
Рэ2 = m2 I22 r2 = m1 I′ 21 r′ 1(13.3)
Здесь r1и r2— активные сопротивления обмоток фаз статора и ротора пересчитанные на рабочую температуру Θраб(см. § 8.4):
r1 = r1.20 [1 + α (Θраб — 20)]; r2 = r2.20 [1 + α (Θра6 — 20)], (13.4)
где r1.20и r2.20 — активные сопротивления обмоток при температуре Θ1= 20 °С; α — температурный коэффициент, для меди и алюминия α = 0,004.
Электрические потери в роторе прямо пропорциональны скольжению:
Рэ2 = s Рэм(13.5)
где Рэм— электромагнитная мощность асинхронного двигателя, Вт:
Рэм = Р1 – (Рм + Рэ1)(13-6)
Из (13.5) следует, что работа асинхронного двигателя экономичнее при малых скольжениях, так как с ростом скольжения растут электрические потери в роторе.
В асинхронных двигателях с фазным ротором помимо перечисленных электрических потерь имеют место еще и электрическиe потери в щеточном контакте Рэ.щ= 3 I2ΔUщ /2, где Uщ=2,2 В — переходное падение напряжения на пару щеток.
Механические потери Рмех— это потери на трение в подшипниках и на вентиляцию. Величина этих потерь пропорциональна квадрату частоты вращения ротора (Рмех= n22). В асинхронных двигателях с фазным ротором механические потери происходят еще и за счет трения между щетками и контактными кольцами ротора.
Добавочные потери включают в себя все виды трудноучитываемых потерь, вызванных действием высших гармоник МДС, пульсацией магнитной индукции в зубцах и другими причинами. В соответствии с ГОСТом добавочные потери асинхронных двигателей принимают равными 0,5% от подводимой к двигателю мощности Р1:
Рдо6 = 0,005 Р1. (13.7)
При расчете добавочных потерь для неноминального режима следует пользоваться выражением
Р′доб = Рдоб β2(13-8)
где β = I1/ I1ном—коэффициент нагрузки.
Сумма всех потерь асинхронного двигателя (Вт)
∑P = Рэм + Рэ1 + Рэ2 + Рмех + Рдоб. (13.9)
На рис. 13.1 представлена энергетическая диаграмма асинхронного двигателя, из которой видно, что часть подводимой к двигателю мощности Р1 = m1U1I1cos φ1затрачивается в статоре на магнитные Рыи электрические Рэ1потери. Оставшаяся после этого электромагнитная мощность Рэм[см. (13.6)] передается на ротор, где частично расходуется на электрические потери Рэ2и преобразуется в полную механическую мощность Р′2. Часть мощности идет на покрытие механических Рмехи добавочных потерь Рдоб, а оставшаяся часть этой мощностиР2 составляет полезную мощность двигателя.
У асинхронного двигателя КПД
η = Р2/ Р1 =1 — ∑P. (13.10)
Электрические потери в обмотках РЭ1и РЭ2являются переменными потерями, так как их величина зависит от нагрузки двигателя, т. е. от значений токов в обмотках статора и ротора [см. (13.2) и (13.3)]. Переменными являются также и добавочные потери (13.8). Что же касается магнитных Рми механических Рмех, то они практически не зависят от нагрузки (исключение составляют двигатели, у которых с изменением нагрузки в широком диапазоне меняется частота вращения).
Коэффициент полезного действия асинхронного двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке (0,7 ÷ 0,8)Рном. При дальнейшем увеличении нагрузки КПД незначительно снижается, а при перегрузке (P2 Рном) он резко убывает, что объясняется интенсивным ростом переменных потерь (Рэ1+ Рэ2+ Рдоб), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности. График зависимости КПД от нагрузки η = f (β) для асинхронных двигателей имеет вид, аналогичный представленному на рис. 1.41 (см. рис. 13.7).
КПД трехфазных асинхронных двигателей общего назначения при номинальной нагрузке составляет: для двигателей мощностью от 1 до 10 кВт ηном= 75 ÷ 88%, для двигателей мощностью более 10 кВт ηном=90 ÷ 94%.
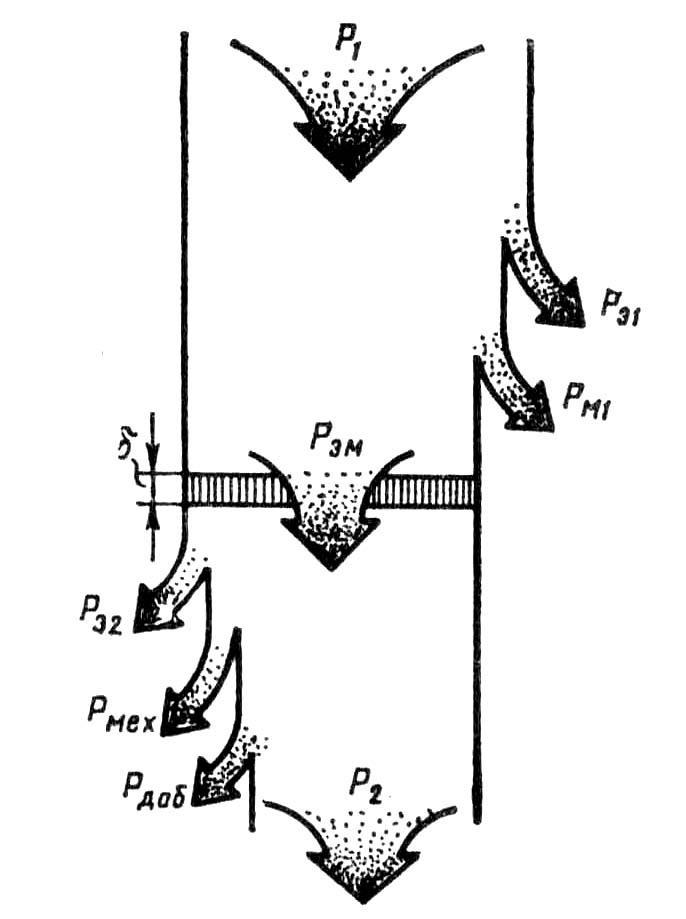
Рис. 13.1. Энергетическая диаграмма асинхронного двигателя
Пример 13.1. Трехфазный асинхронный двигатель работает от сети напряжением 660 В при соединении обмоток статора звездой. При номинальной нагрузке он потребляет из сети мощность Р1 = 16,7 кВт при коэффициенте мощности cos ц1 = 0,87. Частота звращения nном = 1470 об/мин. Требуется определилить КПД двигателя з hоm, если магнитные потери Рм = 265 Вт, а механические потери Рмех = 123 Вт. Активное сопротивление фазы обмотки статора r1.20 = 0,8 Ом, и класс нагревостойкости изоляции двигателя F (рабочая температура Ира6=115 °С).
РешениеТок в фазе обмотки статора
I1ном ===16,8 А
где U1 = 380 В.
Сопротивление фазы обмотки статора, пересчитанное на рабочую температуру
θраб = 115 °С, по (13.4)
r1 = r1.20 [1 + б (Ираб — 20)] = 0,8[1 + 0,004(115 — 20)] = 1,1 Ом.
Электрические потери в обмотке статора по (13.2)
Рэ1 = m1 I21ном r1 = 3 * 16,82 * 1,1 = 93 1 Вт.
Электромагнитная мощность двигателя по (13.6)
РЭМ = Р1 — (Рм + Рэ1) = 16,7 * 103 — (265 + 931) = 15504 Вт.
Номинальное скольжение sном = (n1 — nном)/ n1 = (1500 — 1470)/1500 = 0,020 . Электрические потери в обмотке ротора по (13.5)
Рэ2 =sном Рэм = 0,020 * 15504 = 310 Вт.
Добавочные потери по (13.7)
Рдо6 = 0,005 Р1 =0,005 * 16,7 * 103 =83 Вт.
Суммарные потери по (13.9)
Р = Рм + Рэ1 + Рэ2 + Рмех + Рмех = 265 + 931 + 310 + 123 + 83 = 1712 Вт.
КПД двигателя в номинальном режиме по (13.10)
ηном = 1 — Р/ Р1 = 1 — 1712/ (16,7 * 103) = 0,898 , или 89,8%.
Коэффициент полезного действия является одним из основных параметров асинхронного двигателя, определяющим его энергетические свойства — экономичность в процессе эксплуатации. Кроме того, КПД двигателя, а точнее величина потерь в нем, регламентирует температуру нагрева его основных частей и в первую очередь его обмотки статора. По этой причине двигатели с низким КПД (при одинаковых условиях охлаждения) работают при более высокой температуре нагрева обмотки статора, что ведет к снижению их надежности и долговечности (см. § 8.4).
Для выполнения домашней работы необходимо знать устройство и принцип действия асинхронного двигателя и зависимости между электрическими величинами, характеризующими его работу.
Асинхронный трехфазный двигатель с короткозамкнутым ротором при номинальной мощности Р2, напряжении Uном, и токе Iномпотребляет из сети мощность Р1. КПД двигателя ηном, а коэффициент мощности cos φном. Потери в обмотках статора Ро1, в стали статора Рст1, в обмотках ротора Ро2, механические Рм.п. Суммарные потери в двигателе ∑р. Электромагнитная мощность, передаваемая магнитным потоком ротору, Рэм. Двигатель развивает номинальный момент Мном и электромагнитный момент Мэм при частоте вращения n2. Определить величины, отмеченные прочерками в таблице1.
Начертить в масштабе энергетическую диаграмму двигателя.
Таблица 1
|
№ вар. |
Р2 |
Uном |
Iном |
Р1 |
ηном |
cosφ |
Ро1 |
Рст1 |
Ро2 |
Рм.п |
∑р |
Рэм |
Мном |
Мэм |
n2 |
|
кВт |
В |
А |
кВт |
кВт |
кВт |
кВт |
кВт |
кВт |
кВт |
Нм |
Нм |
об/мин |
|||
|
— |
15,8 |
— |
0,88 |
— |
0,25 |
— |
0,15 |
— |
— |
4.73 |
29,8 |
— |
|||
|
— |
— |
2,91 |
0,86 |
0,82 |
— |
0,1 |
0,08 |
0,05 |
— |
— |
8,22 |
— |
— |
||
|
4,5 |
— |
— |
— |
0,85 |
0,25 |
— |
0,15 |
0,08 |
0,62 |
— |
29,8 |
— |
— |
||
|
— |
5,38 |
— |
0,86 |
0,82 |
0,18 |
0,1 |
0,08 |
— |
— |
— |
— |
— |
|||
|
— |
22,4 |
— |
— |
— |
— |
0,4 |
— |
0,2 |
2,2 |
20,8 |
— |
||||
|
— |
14,2 |
— |
— |
0,85 |
— |
0,2 |
— |
0,11 |
0,96 |
7,36 |
— |
— |
|||
|
— |
— |
22,4 |
22,2 |
— |
0,87 |
— |
0,6 |
— |
2,2 |
20,8 |
— |
— |
|||
|
2,5 |
— |
5,38 |
— |
0,86 |
0,82 |
0,18 |
— |
— |
0,05 |
— |
2,53 |
— |
8,33 |
— |
|
|
— |
22,2 |
— |
0,87 |
0,4 |
— |
0,2 |
— |
— |
— |
20,8 |
— |
||||
|
— |
14,2 |
7,96 |
— |
— |
0,4 |
— |
0,25 |
— |
0,96 |
— |
— |
7,36 |
Контрольные вопросы:
1. В чем сущность активной и реактивной мощности асинхронного двигателя?
2. Какие виды потерь имеют место в асинхронном двигателе и какова их природа?
3. Дайте определение КПД асинхронного двигателя.
Gосле проведения анализа проблемы энергосбережения оказалось, что более половину электроэнергии, вырабатываемой в мире, расходуют электродвигатели. Потому над их совершенствованием работают все ведущие электротехнические компании в мире.
Что же такое энергосберегающие двигатели?
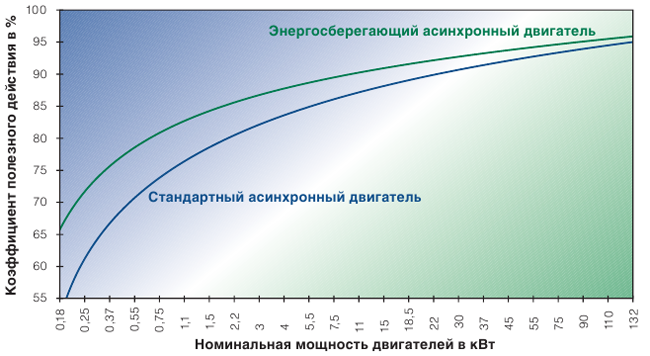
Это электродвигатели, КПД которых на 1–10% выше, чем у стандартных двигателей. В крупных энергосберегающих двигателях, разница в значениях КПД составляет 1–2%, а в двигателях малой и средней мощности эта разница составляет уже 7–10%.
КПД электродвигателей Siemens
Увеличение КПД в в энергосберегающих двигателях достигается за счет:
-
увеличения доли активных материалов – меди и стали;
-
использование более тонкой и высококачественной электротехнической стали;
-
применение вместо алюминия меди в роторных обмотках;
-
уменьшения воздушного зазора в статоре с помощью прецизионного технологического оборудования;
-
оптимизации формы зубцовой зоны магнитопровода и конструкции обмоток;
-
использование подшипников более высокого класса;
-
особой конструкции вентилятора;
П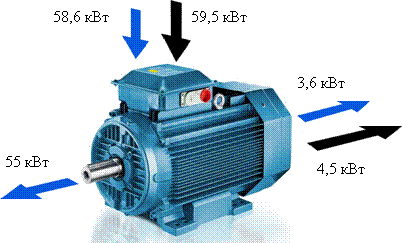 о статистическим данным, цена всего двигателя составляет менее 2% суммарных затрат на жизненный цикл. Так, если двигатель работает 4000 часов ежегодно в течение 10 лет, то на электроэнергию приходится примерно 97% всех затрат на весь жизненный цикл. Еще около одного процента приходится на монтаж и техобслуживание. Поэтому увеличение КПД двигателя средней мощности на 2% позволит окупить увеличение стоимости энергосберегающего двигателя уже через 3 года, в зависимости от режима работы. Практический опыт и расчеты показывают, что увеличение стоимости энергосберегающего двигателя окупается за счет сэкономленной электроэнергии при эксплуатации в режиме S1 за год-полтора (при годовой наработке 7000 часов).
о статистическим данным, цена всего двигателя составляет менее 2% суммарных затрат на жизненный цикл. Так, если двигатель работает 4000 часов ежегодно в течение 10 лет, то на электроэнергию приходится примерно 97% всех затрат на весь жизненный цикл. Еще около одного процента приходится на монтаж и техобслуживание. Поэтому увеличение КПД двигателя средней мощности на 2% позволит окупить увеличение стоимости энергосберегающего двигателя уже через 3 года, в зависимости от режима работы. Практический опыт и расчеты показывают, что увеличение стоимости энергосберегающего двигателя окупается за счет сэкономленной электроэнергии при эксплуатации в режиме S1 за год-полтора (при годовой наработке 7000 часов).
В общем случае переход к применению энергосберегающего двигателя позволяет:
-
увеличить КПД двигателя на 1–10%;
-
повысить надежность его работы;
-
снизить время простоев;
-
уменьшить затраты на техобслуживание;
-
увеличить устойчивость двигателя к тепловым перегрузкам;
-
повысить перегрузочную способность;
-
поднять устойчивость двигателя к ухудшению эксплуатационных условий;
-
сниженному и завышенному напряжению, искажению формы кривой напряжения, перекосу фаз и т. д.;
-
повысить коэффициент мощности;
-
уменьшить уровень шума;
-
поднять скорость двигателя за счет уменьшения скольжения;
Отрицательным свойством электродвигателей с повышенным КПД по сравнению с обычными являются:
-
на 10 – 30% выше стоимость;
-
несколько больше масса;
-
более высокая величина пускового тока.
В некоторых случаях использование энергоэффективного двигателя является нецелесообразным:
-
при эксплуатации двигателя эксплуатируется короткое время (менее 1–2 тыс.часов/год), внедрение энергоэффективного двигателя может не внести существенного вклада в энергосбережение;
-
при работе двигателя в режимах с частым запуском, так как сэкономленная электроэнергия будет израсходована на более высокое значение пускового тока;
-
при работе двигателя работает с недогрузом, за счет уменьшения КПД при работе на нагрузку ниже номинальной.
Объемы энергосбережения в результате внедрения энергоэффективного двигателя могут оказаться незначительными по сравнению с потенциалом привода с переменной скоростью.Каждый дополнительный процент КПД требует увеличения массы активных материалов на 3–6%. При этом момент инерции ротора возрастает на 20–50%. Поэтому высокоэффективные двигатели уступают обычным по динамическим показателям, если при их разработке специально не учитывается это требование.
При выборе в пользу энергоэффективного двигателя, необходимо тщательно подходить к вопросу цены. По прогнозам аналитиков медь будет дорожать значительно быстрее стали. Поэтому там, где есть возможность, применять так называемые стальные двигатели (с меньшей площадью пазов), то лучше применять их. Такие двигатели имеют меньшую стоимость за счет экономии меди. По тем же причинам необходимо относиться к энергосберегающим двигателям с постоянными магнитами. Если вам в будущем придется искать замену такого двигателя . может оказаться, что его цена будет слишком высока, а замена его на энергосберегающий двигатель общепромышленного исполнения будет затруднительна из за несоответствия габаритов. По оценкам экспертов постоянные магниты из редкоземельных материалов будут дорожать больше и быстрее, чем медь, что приведет к значительному подорожанию таких двигателей. Хотя такие двигатели при высшем классе энергоэффективности достаточно компактны, их внедрение в промышленность ограничено тем, что постоянные магниты сейчас востребованы в других отраслях, нежели общепром, и, по оценкам специалистов будут использоваться при выпуске специальной техники, на которую денег не жалеют.
“ЭНергоэффективные электродвигатели
Понятие энергоэффективности
Под энергоэффективностью понимается рациональное использование энергетических ресурсов, с помощью которого достигается уменьшение потребления энергии при том же уровне нагрузочной мощности.
На рис. 1а, б приведены примеры нерационального и рационального использования энергии. Мощности Рн приемников 1 и 2 одинаковые, при этом потери ΔР1, выделяющиеся в приемнике 1, значительно превосходят потери ΔР2, которые выделяются в приемнике 2. Как следствие, потребляемая мощность ΔРп1 приемником 1 больше мощности ΔРп2, потребляемой приемником 2. Таким образом, приемник 2 является энергоэффективным по сравнению с приемником 1.
Приемник 1
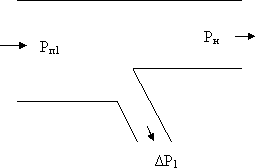
Рис. 1а. Нерациональное использование энергии
Приемник 2
Рис. 1б. Рациональное использование энергии
В современном мире вопросам энергоэффективности уделяется особое внимание. Объясняется это отчасти тем, что решение данной задачи может привести к достижению основных целей международной энергетической политики:
-
повышению энергетической безопасности;
-
снижению вредного экологического воздействия вследствие использования энергоресурсов;
-
повышению конкурентоспособности промышленности в целом.
В последнее время был принят целый ряд инициатив и мер в отношении энергоэффективности на региональном, национальном и международном уровнях.
Энергетическая стратегия России
В России разработана Энергетическая стратегия, которая подразумевает развёртывание программы энергоэффективности в рамках комплексной политики энергосбережения. Данная программа направлена на создание базисных условий для ускоренного технологического обновления энергетической отрасли, развития современных перерабатывающих производств и транспортных мощностей, а также на освоение новых, перспективных рынков.
23 ноября 2009 г. президентом Российской Федерации Д.А. Медведевым был подписан Федеральный закон № 261-ФЗ «Об энергосбережении и о повышении энергетической эффективности и о внесении изменений в отдельные законодательные акты Российской Федерации». Данный закон формирует принципиально новое отношение к процессу энергосбережения. В нем четко обозначены полномочия и требования в этой области для всех уровней власти, а также заложена основа для достижения реального результата. Законом вводится обязанность по учету энергетических ресурсов для всех предприятий. Организации, совокупные годовые затраты которых на потребление энергоресурсов превышают 10 миллионов рублей, предлагается обязать до 31 декабря 2012 года и далее не реже 1 раза в 5 лет проходить энергетические обследования, по результатам которых составляется энергетический паспорт предприятия, фиксирующий продвижение по шкале энергоэффективности.
С принятием закона ‘Об энергоэффективности’, одними из ключевых статей документа стали поправки в Налоговый кодекс (Статья 67 часть 1), которые освобождают от налога на прибыль предприятия, использующие объекты, имеющие наивысший класс энергоэффективности. Правительство РФ готово оказывать субсидии и снижение налогового бремени тем предприятиям, которые готовы поднять своё оборудование до уровня энергосберегающей техники.
Энергоэффективность электродвигателей
По данным РАО «ЕЭС России» за 2006-й год около 46% вырабатываемой электроэнергии в России потребляется промышленными предприятиями (рис. 1), половина этой энергии посредством электродвигателей преобразуется в механическую.
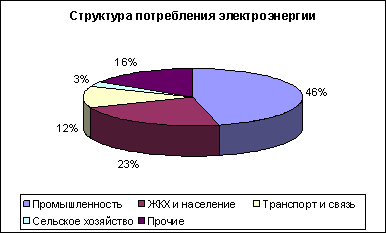
Рис. 2. Структура потребления электроэнергии в России
В процессе преобразования энергии, часть ее теряется в виде тепла. Величина потерянной энергии определяется энергетическими показателями двигателя. Применение энергоэффективных электродвигателей позволяет существенно снизить потребление энергии и уменьшить содержание углекислого газа в окружающей среде.
Основным показателем энергоэффективности электродвигателя, является его коэффициент полезного действия (далее КПД):
η=P2/P1=1 – ΔP/P1,
где Р2 – полезная мощность на валу электродвигателя, Р1 – активная мощность потребляемая электродвигателем из сети, ΔP – суммарные потери возникающие в электродвигателе.
Очевидно, чем выше КПД (и соответственно ниже потери), тем меньше энергии потребляет электродвигатель из сети для создания той же самой мощности P2. В качестве демонстрации экономии электроэнергии при использовании энергоэффективных двигателей сравним количества потребляемой мощности на примере электродвигателей ABB обычной (М2АА) и энергоэффективной (М3АА) серий (рис. 3).
1. Серия М2АА (класс энергоэффективности IE1): мощность Р2=55 кВт, частота вращения n=3000 об/мин, η=92,4%, cosφ=0,91
Активная мощность, потребляемая из сети:
Р1=Р2/η=55/0,924=59,5 кВт.
Суммарные потери:
ΔP=Р1–Р2=59,5-55=4,5 кВт.
Если предположить, что данный двигатель работает 24 часа в сутки, 365 дней в году, то количество энергии, теряемое и выделяемое в виде тепла
Q=4,5·24·365=39420 кВт.
При средней стоимости электроэнергии 2 руб. за кВт/ч количество потерянной электроэнергии за 1 год в денежном эквиваленте
C=2·39420=78840 руб.
2. Серия М3АА (класс энергоэффективности IE2): мощность Р2=55 кВт, частота вращения n=3000 об/мин, η=93,9%, cosφ=0,88
Активная мощность, потребляемая из сети:
Р1=Р2/η=55/0,939=58,6 кВт.
Суммарные потери:
ΔP=Р1–Р2=58,6-55=3,6 кВт.
Если предположить, что данный двигатель работает 24 часа в сутки, 365 дней в году, то количество энергии, теряемое и выделяемое в виде тепла
Q=3,6·24·365=31536 кВт.
При средней стоимости электроэнергии 2 руб. за кВт/ч количество потерянной электроэнергии за 1 год в денежном эквиваленте
C=2·31536=63072 руб.
Таким образом, в случае замены обычного электродвигателя (класс IE1) энергоэффективным (класс IE2) экономия энергии составляет 7884 кВт в год на один двигатель. При использовании 10 таких электродвигателей экономия составит 78840 кВт в год или в денежном выражении 157680 руб./год. Таким образом, эффективное использование электроэнергии позволяет предприятию снизить себестоимость выпускаемой продукции, тем самым, повысив ее конкурентоспособность.
Стоимостная разница электродвигателей с классами энергоэффективности IE1 и IE2, составляющая 15621 руб., окупается приблизительно за 1 год.
Рис. 3. Сравнение обычного электродвигателя с энергоэффективным
Следует отметить, что с ростом энергоэффективности увеличивается и срок службы двигателя. Это объясняется следующим. Источником нагрева двигателя являются потери, выделяемые в нем. Потери в электрических машинах (ЭМ) подразделяются на основные, обусловленные протекающими в ЭМ электромагнитными и механическими процессами, и добавочные, обусловленные различными вторичными явлениями. Основные потери подразделяют на следующие классы:
-
1. механические потери (включают в себя вентиляционные потери, потери в подшипниках, потери на трение щеток о коллектор или контактные кольца);
-
2. магнитные потери (потери на гистерезис и вихревые токи);
-
3. электрические потери (потери в обмотках при протекании тока).
Согласно эмпирическому закону срок службы изоляции уменьшается в два раза при увеличении температуры на 100С. Таким образом, срок службы двигателя с повышенной энергоэффективностью несколько больше, так как потери и следовательно нагрев энергоэффективного двигателя меньше.
Способы повышения энергоэффективности двигателя:
-
1. Применение электротехнических сталей с улучшенными магнитными свойствами и уменьшенными магнитными потерями;
-
2. Использование дополнительных технологических операций (например, отжиг для восстановления магнитных свойств сталей, как правило, ухудшающихся после механообработки);
-
3. Использование изоляции с повышенной теплопроводностью и электрической прочностью;
-
4. Улучшение аэродинамических свойств для снижения вентиляционных потерь;
-
5. Использование высококачественных подшипников (NSK, SKF);
-
6. Увеличение точности обработки и изготовления узлов и деталей двигателя;
-
7. Использование двигателя совместно с частотным преобразователем.
Еще одним важным параметром, характеризующим энергоэффективность электродвигателя, является коэффициент нагрузки cosφ. Коэффициент нагрузки определяет долю активной мощности в полной, поступающей в электродвигатель из сети.
cosφ=Р1/S,
где S – полня мощность.
При этом только активная мощность преобразуется в полезную мощность на валу, реактивная мощность нужна лишь для создания электромагнитного поля. Реактивная мощность поступает в двигатель и возвращается обратно в сеть с удвоенной частотой сети 2f, создавая тем самым в подводящих линиях дополнительные потери. Таким, образом, система, состоящая из двигателей с высоким значениями КПД, но низкими значениями cosφ, не может считаться энергоэффективной.
Препятствия на пути внедрения энергоэффективных систем электропривода
Не смотря на высокую результативность энергоэффективных решений, на сегодняшний день существует ряд препятствий для распространения энергоэффективных систем электропривода:
-
1. Замена только одного или двух электродвигателей на целом предприятии является несущественной мерой;
-
2. Низкий уровень информированности потребителей в области классов энергоэффективности двигателей, их различий и существующих стандартов;
-
3. Раздельное финансирование на многих предприятиях: распорядитель бюджета на закупки электродвигателей часто является не тем лицом, которое занимается вопросами снижения себестоимости выпускаемой продукции или несет ежегодные расходы на техническое обслуживание;
-
4. Приобретение электродвигателей в составе комплексного оборудования, производители которого часто в целях удешевления продукции устанавливают электродвигатели низкого качества;
-
5. В рамках одной компании расходы на приобретение оборудования и на потребление энергии за срок службы часто оплачиваются по разным статьям;
-
6. На многих предприятиях существуют запасы электродвигателей, как правило, того же типа и того же класса эффективности.
Важным аспектом в вопросах, связанных с энергоэффективностью электрических машин, является популяризация принятия решения на приобретение оборудования на основе оценки суммарных эксплуатационных расходов за срок службы.
Новые международные стандарты, регламентирующие энергоэффективность электродвигателей.
В 2007, 2008-м гг. IEC были введены два новых стандарта, касающихся энергоэффективности электродвигателей: стандарт IEC/EN 60034-2-1 устанавливает новые правила определения КПД, стандарт IEC 60034-30 – новые классы энергоэффективности электродвигателей.
В стандарте IEC 60034-30 установлены три класса энергоэффективности трехфазных асинхронных электродвигателей с короткозамкнутым ротором (рис. 1).
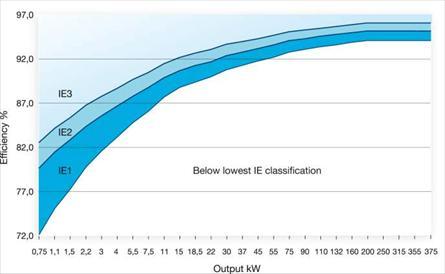
Рис. 4. Классы энергоэффективности согласно новому стандарту IEC 60034-30
В настоящее время обозначение классов энергоэффективность часто можно увидеть в виде следующих комбинаций: EFF3, EFF2, EFF1. Однако границы разделения классов (рис. 2) установлены старым стандартом IEC 60034-2, на смену которому пришел новый IEC 60034-30 (рис. 1).
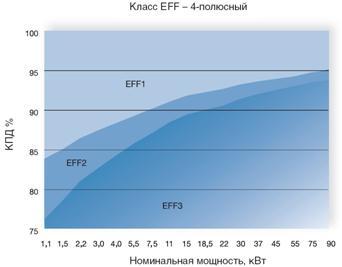
Рис. 5. Классы энергоэффективности согласно старому стандарту IEC 60034-2
Потери асинхронного двигателя
Работа асинхронного двигателя, как и любой другой машины, сопровождается потерями. Потери в конечном итоге, приводят к нагреву двигателя и снижению его КПД.
КПД асинхронного двигателя, представляет собой отношение полезной мощности на выходе P2 к подводимой двигателю мощности P1, выраженная в процентах

Мощность, подводимая к двигателю

где m – количество фаз, U1 – напряжение на статорной обмотке, I1 – ток в статорной обмотке, cosφ1 – коэффициент мощности двигателя
Полезная мощность на выходе P2, меньше подводимой мощности P1 на величину суммарных потерь ∑P

Потери ∑P складываются из магнитных, электрических и механических потерь
В первую очередь часть подводимой мощности P1 расходуется на покрытие магнитных Pм1 и электрических Pэ1 потерь в статоре
Электрические потери в статоре

где r1 активное сопротивление обмотки статора
Магнитные потери в статоре приблизительно определяются как

где f1 – частота тока перемагничивания, которая равна частоте тока в сети. V = 1.3-1.5. Магнитные потери в роторе малы настолько, что ими при практических расчетах пренебрегают. Это связано с малой частотой перемагничивания ротора.
Мощность, оставшаяся после восполнения потерь в статоре, называется электромагнитной и равна

Электромагнитная мощность передается ротору с помощью магнитного поля, через воздушный зазор δ. Часть электромагнитной мощности затрачивается на электрические потери в роторе, которые пропорциональны скольжению

Отсюда можно получить выражение для скольжения

Не трудно заметить, что с увеличением скольжения электрические потери в роторе также увеличиваются, а это в свою очередь вызывает уменьшение КПД.
В асинхронных двигателях с фазным ротором, присутствуют потери в щеточном узле, которые обычно добавляют к электрическим потерям в роторе

где I2 – ток ротора, Uщ – падение напряжения на пару щеток
Оставшаяся мощность называется механической

Часть механической мощности расходуется на механические и добавочные потери.
К механическим, относятся потери от трения в подшипниках, щетках и вентиляционные.
К добавочным потерям относят все остальные трудно учитываемые потери, которые, как правило, состоят из пульсационных и поверхностных потерь, которые возникают в зубцах ротора и статора. Приблизительное значение добавочных потерь рассчитывается по формуле

Оставшаяся мощность представляет собой полезную мощность на валу двигателя
 Рекомендуем к прочтению — Построение механической характеристики асинхронного двигателя
Рекомендуем к прочтению — Построение механической характеристики асинхронного двигателя
Содержание
- 1 Постоянные потери асинхронной машины
- 1.1 В стали
- 1.2 Механический тип потерь. Трение щеток
- 2 Переменный вид потерь
- 3 Потери мощности и КПД в трехфазном приводе переменного тока
- 3.1 КПД асинхронной машины
Во время превращения одной энергии в другую в электродвигателе в виде теплоты неустанно рассеивается их часть. Это и называется потерей. Потери могут быть фиксированными и переменными, а также делятся на еще несколько подвидов.

Асинхронный двигатель
Постоянные потери асинхронной машины
Трехфазный асинхронный электропривод переменного тока может иметь два вида потерь:
- Постоянный вид.
- Переменный вид потерь.
Фиксированные – это те, что не изменяются, если электромотор работает полностью исправно и с нормальной нагрузкой. Их можно получить и в результате холостого прогона агрегата. Они делятся на еще три подвида потерь:
- В стали (а еще железа или сердечника).
- Механические.
- Расходы при трении щеток.
В стали
Такой вид потерь в стали, в свою очередь, может быть гистерезисным или расходом вихревого электротока. Второй типа можно эффективно минимизировать, если использовать наслоение на сердечник. С применением наслоения сокращается участок, что ведет к увеличению сопротивления, а значит сокращение вихревых токов неизбежно.
Первый же тип, гистерезисный, уменьшают, пользуясь высококачественной сталью, в составе которой есть кремний. Почему? Любая потеря связана с частотой напряжения, поступающего в двигатель. Статорная частота всегда подающая, обозначается как f, а вот частотность якоря – это проскальзывание s. Оно умножается на подающую (sf). Якорная частота, в асинхронной машине, надо заметить, всегда будет ниже статорной.
Показатель подающей частоты равен 50 Гц, а вот якорная составляет приблизительно 1,5 Гц. Так получается по той простой причине, что величина проскальзывания равна лишь 3% для нормального рабочего состояния привода. Поэтому и расход в роторе относительно малы, в сравнении с потерей в статоре. Потерями роторного сердечника, обычно, можно спокойно пренебречь.
Механический тип потерь. Трение щеток
Механический вид – это расходы, возникающие в подшипниках, а трения щеток имеют место во всех асинхронных электромоторах, ротор которых обмотан. При запуске машины они являются нулевыми. С увеличением скорости работы агрегата, они тоже растут. В трехфазном движке скорость принимает определенное значение и не меняется на протяжении всего рабочего цикла. Поэтому и данные потери в нем всегда будут постоянными.
Переменный вид потерь
Другое название – расходы меди. Появляются они из-за того, что электроток идет по статорным и роторным обмоткам. При смене нагрузки на движок, электроток тоже меняет значение, что ведет и к изменению величины потерь меди. Это и послужило источником их названия. Получить их можно, если провести тест трехфазного агрегата при заблокированном роторе.
Главная задача асинхронной машины заключается в преобразовании электроэнергии в механическую силу. Пока происходит такая трансформация, одна энергия становится другой, она проходит несколько разных этапов. Эту проходящую ступени преобразования энергию можно изобразить с помощью диаграммы.

Энергетическая диаграмма двигателя
Частично двигатель использует ее, чтобы поддерживать статорные расходы: стали и меди. Та часть, которая остается сохранной, поступает к якорю в качестве входа на ротор.
Из этого следует, что вход на ротор равен статорным потерям (P2 = Pin). Теперь сохранившаяся входная энергия должна пройти преобразование и стать механической. Однако, механическим выходом она стать не может, так как он поддерживает потери.
Как мы уже поняли, роторные потери можно разделить на две группы: меди и железа. Последние ничтожно малы, настолько, что ими можно пренебречь. Это связано с тем, что они зависят от роторной частоты, а она составляет примерно 1,5 Гц.
Следуя из вышесказанного, можно смело утверждать, что ротор обладает лишь потерями меди. Так вот, после именно ее поддержки не преобразованная часть электроэнергии, которая осталась становиться механической. Ее обозначают как Pm.
После всего этого, новопреобразованая сила отправляется на нагрузку, чему помогает вал. Но на этом этапе неизбежны уже механические расходы. В их число входит трение и сопротивление в воздухе. Поэтому общая механическая энергия, которая воспроизводиться в электродвигателе обязательно уходит, чтобы поддерживать эти потери.
Так что образованная в итоге энергия отправляется на вал мотора. Ее, в конце концов, подают нагрузке. Обозначается это как Pout. Она носит название энергии вала или, по-другому, полезная.
Pout это и есть механические потери Pm. Они связаны с сопротивлением в воздухе и трением.
Потери мощности и КПД в трехфазном приводе переменного тока
Итак, потери в двигателе могут механическими, магнитными или электрическими.
От питающей сети на статорную обмотку происходит подача мощности Р1. Одна ее часть идет в расход, чтобы покрыть магнитные потери в статорном сердечнике рс1. Используется она и в статорной обмотке, чтобы поддержать электропотери из-за нагретой намотки.
Вся та мощность, которая осталась, магнитным поток подается к ротору. Из-за этого она и называется электромагнитной. Эта оставшаяся электромагнитная мощность превращается в механическую. Последняя носит название полная «механическая мощность электрического привода».
Мощность роторных электропотерь имеет прямую зависимость от скольжения, поэтому асинхронная машина будет работать тем экономичнее, чем меньше будет составлять величина скольжения.
Последнее по очереди, но не по важности – возникновение магнитных потерь. Они тоже возникают в подвижном элементе электромотора, но небольшая электротоковая частота (f2 = f1s) делает их настолько малыми, что ими также можно пренебречь.
Трение частей системы, которые вращаются, о воздух, а также трение, происходящее в подшипнике обуславливает появление механического расхода.
Поля рассеяния наряду с пульсациями в статоре и якоре становятся причиной добавочного вида потерь.
Из всего, что сказано выше, можно собрать формулу общих потерь. Она приведена ниже:
∑р = рс1 + рэ1 + рэ2+ рмех + рд
КПД асинхронной машины
Так как коллектор в двигателе отсутствует, коэффициент полезного действия электроприводов такого типа выше, чем у их «собратьев», питающихся постоянным током. Величина мощности АД прямо влияет на коэффициент. Если нагрузка на агрегат нормальная, то он может составлять до 95%.