Мощность асинхронного двигателя формула
Механические и электрические характеристики асинхронных электродвигателей
 В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 – 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
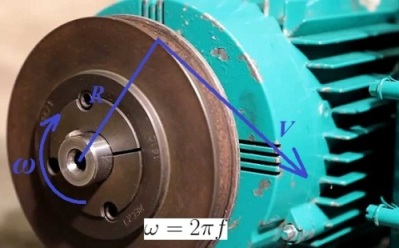
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.

Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
Онлайн расчет характеристик трехфазных электродвигателей
1. Расчет мощности электродвигателя
Расчет мощности электродвигателя по току можно произвести с помощью нашего онлайн калькулятора:
Полученный результат можно округлить до ближайшего стандартного значения мощности.
Стандартные значения мощностей электродвигателей: 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75 кВт и т.д.
Расчет мощности двигателя производится по следующей формуле:
P=√3UIcosφη
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
2. Расчет тока электродвигателя
Расчет номинального и пускового тока электродвигателя по мощности можно произвести с помощью нашего онлайн калькулятора:
Расчет номинального тока двигателя производится по следующей формуле:
Iном=P/√3Ucosφη
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
Расчет пускового тока электродвигателя производится по формуле:
Iпуск=Iном*K
- К — Кратность пускового тока, данная величина берется из паспорта электродвигателя, либо из каталожных данных (в приведенном выше онлайн калькуляторы кратность пускового тока определяется приблизительно исходя из прочих указанных характеристик электродвигателя).
3. Расчет коэффициента мощности электродвигателя
Онлайн расчет коэффициента мощности (cosφ) электродвигателя
Расчет cosφ (косинуса фи) двигателя производится по следующей формуле:
cosφ=P/√3UIη
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
4. Расчет КПД электродвигателя
Онлайн расчет КПД (коэффициента полезного действия) электродвигателя
Расчет коэффициента полезного действия электродвигателя производится по следующей формуле:
η=P/√3UIcosφ
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
Оказались ли полезны для Вас данные онлайн калькуляторы? Или может быть у Вас остались вопросы? Напишите нам в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
Механические и электрические характеристики асинхронных электродвигателей
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.
Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.
Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.
Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 – 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.
Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя
Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Умножая на 2 Пи, имеем: 47,833*2*3,14159 = 300,543 рад/с. Можно перевести в градусы, для этого вместо 2 Пи подставить 360 градусов, тогда для нашего примера получится 360*47,833 = 17220 градусов в секунду. Однако подобные расчеты обычно ведут именно в радианах в секунду. Поэтому угловая скорость ω = 2*Пи*f, где f = n1/60.
Линейная скорость асинхронного электродвигателя
Линейная скорость v относится к оборудованию, на котором асинхронный двигатель установлен в качестве привода. Так, если на вал двигателя установлен шкив или, скажем, наждачный диск, известного радиуса R, то линейная скорость точки на краю шкива или диска может быть найдена по формуле:
Номинальный вращающий момент асинхронного двигателя
Каждый асинхронный электродвигатель характеризуется номинальным вращающим моментом Мн. Вращающий момент М связан с механической мощностью P1 через угловую скорость следующим образом:
Вращающий момент или момент силы, действующей на определенном расстоянии от центра вращения, для двигателя сохраняется, причем с ростом радиуса уменьшается сила, а чем радиус меньше, тем больше сила, поскольку:
Так, чем больше радиус шкива, тем меньшая сила действует на его краю, а наибольшая сила действует непосредственно на валу электродвигателя.
Для приведенного в качестве примера двигателя АИР80В2У3 мощность P1 равна 2200 Вт, а частота n1 равна 2870 оборотов в минуту или f = 47,833 оборота в секунду. Следовательно угловая скорость составляет 2*Пи*f, то есть 300,543 рад/с, и номинальный вращающий момент Мн равен P1/(2*Пи*f). Мн = 2200/(2*3,14159*47,833) = 7,32 Н*м.
Таким образом, исходя из данных, указанных на шильдике асинхронного электродвигателя, можно найти все основные электрические и механические его параметры.
Надеемся, что данная статья помогла вам разобраться в том, как связаны между собой угловая скорость, частота, вращающий момент, активная, полезная и полная мощность, а также КПД электродвигателя.
{SOURCE}
Главная / Техническая информация / Механические характеристики асинхронного двигателя
Механические характеристики асинхронного двигателя — зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу).
Электромагнитный момент М, развиваемый асинхронным двигателем, можно определять двумя способами: через электромагнитную мощность Рэм и через полную механическую мощность двигателя Р2:
М=Р2‘/ω, (39)
где Р2 —полная механическая мощность, Вт; ω=2πn/60 — механическая угловая скорость вращения ротора, 1/с; n — частота вращения ротора, об/мин.
Скорость ω связана с синхронной ω1 соотношением

Подставляя выражение для ω и Р2‘ по уравнению (36) в уравнение (39), получаем
 (40)
(40)
Выражение для момента через электромагнитную мощность имеет вид
М=Рэм/ω1,
Значение Рэм находится по уравнению (35), после чего представляем
Таким образом мы получим тождественное выражение для момента. Поскольку независимой величиной является не ток, а приложенное напряжение, то для получения окончательного выражения момента подставим в (40) значение тока I2‘ по уравнению (32):
 (41)
(41)
где М — момент, Н∙м; ω1 — синхронная скорость, с-1; U1 — напряжение, В; r1, r2‘, x1, x2‘ —сопротивления, Ом; s — скольжение, отн. ед.
Если необходимо иметь значение момента во внесистемных единицах — в килограммах силы-метрах, то полученный по (41) результат следует разделить на 9,81.
При эксплуатации часто необходимо определять момент по известной механической мощности Р2 (кВт) и частоте вращения n (об/мин). В этом случае формула (39) имеет вид, Н/м,
 (42)
(42)
Отсюда мощность Р2 связана с моментом и частотой вращения соотношением
 (43)
(43)
где М — момент, Н∙м; n — частота вращения, об/мин.
Если момент выражен в килограммах силы-метрах, то формулы (42), (43) преобразуются к виду

Зависимость между моментом и скольжением (41) при постоянном напряжении U1 и частоте f1 сети называется механической характеристикой. Естественная механическая характеристика асинхронного двигателя приведена на рис. 20. Там же приведена механическая характеристика M=f (n), часто встречающаяся на практике и полученная из характеристики M = φ(s) пересчетом (s=0 соответствует синхронной частоте вращения n1, s =1-n=0 и т. д.).
Рис. 20. Естественная механическая характеристика асинхронного двигателя: a —M=f(s); б – n =f(М); А—генераторный режим; Б — режим двигателя; В — режим электромагнитного тормоза
Используя формулу (41), можно получить достаточно полное представление о механических характеристиках асинхронного двигателя. Обратим прежде всего внимание на то, что механический момент двигателя зависит от трех групп величин: во-первых, это величины, определяемые конструкцией двигателя, к их числу относятся r1 и r’2, x1, х’2; во-вторых, величины, характеризующие напряжение, подводимое к двигателю, — напряжение на его зажимах U и частота питающего напряжения f (так как ω1 = 2πf); наконец, последняя величина, определяющая момент, развиваемый двигателем, зависит от режима его работы — это скольжение s.
Рассмотрим физические явления, обусловливающие такую форму механической характеристики. При частоте вращения ротора, равной синхронной, проводники ротора движутся с той же скоростью, что и вращающееся магнитное поле. Поэтому ЭДС, а следовательно, и ток в роторе равны нулю. Поэтому равен нулю и вращающий момент двигателя. При уменьшении частоты вращения ротора ниже синхронной проводники обмотки ротора начинают пересекать магнитное поле машины, в результате чего в обмотке ротора наводится ЭДС, пропорциональная скольжению ротора [см. формулу (14)]. При малых скольжениях (в пределах от s=0 до s=sкр) ток ротора также изменяется почти пропорционально скольжению. К такому выводу можно прийти, рассматривая уравнение (25) или (32). Так, в уравнении (25) при малых значениях s можно пренебречь составляющей sx2 в знаменателе по сравнению со значением r2, а в (32) можно пренебречь всеми составляющими в знаменателе по сравнению со значением r’2/s.
Таким образом, ток ротора в этом диапазоне скольжений практически определяется величиной ЭДС ротора, деленной на постоянное активное сопротивление r2 [уравнение (25)].
Как видно из рис. 20, механическая характеристика в зоне малых скольжений s<sкр линейна. В этой же области скольжений находится и номинальное скольжение sном=0,01—0,1 (большие значения номинального скольжения относятся к двигателям мощностью до 1 кВт).
По мере увеличения скольжения увеличивается частота токов в роторе и возрастает влияние на характеристику индуктивного сопротивления ротора. Изменение тока, определяемое в зоне малых скольжений в основном активным сопротивлением [см. формулу (25)], замедляется, и при некотором скольжении, называемом критическим sкр, достигается максимальное значение момента. При дальнейшем увеличении скольжения (уменьшении частоты вращения ротора) момент будет уменьшаться.
Критическое скольжение находится по формуле
 (44)
(44)
где знак плюс соответствует двигательному режиму работы, а минус — генераторному (как следует из рис. 20, генераторный режим соответствует области отрицательных скольжений).
Поскольку для двигателей мощностью более 1 кВт практически всегда r1<<(х1 + х’2), то формулу для критического скольжения можно упростить:
 (44а)
(44а)
Теперь, подставляя значение s=sкр в формулу (41), получим выражение для максимального момента
 (45)
(45)
Взяв теперь отношение текущего значения момента к максимальному М/Мmax при условии r1≈0, получим
 (46)
(46)
Формула (46) оказывается весьма удобной, так как позволяет построить механическую характеристику двигателя M=f(s) при известных значениях максимального момента и соответствующего ему критического скольжения. Задавая текущее значение скольжения в диапазоне 0<s≤1, решают уравнение (46) относительно текущего момента М. Можно поступить иначе — строить механическую характеристику в относительных единицах, т. е. получать характеристику M/Mmax=f (s).
Относительный максимальный момент определяет его перегрузочную способность, т. е. способность двигателя кратковременно выдерживать нагрузки, большие номинальной. В электрических машинах перегрузочная способность обозначает kм и определяется как
kм = Mmax/Mном (47)
Важное значение имеет пусковой момент, который можно рассчитывать по общей формуле (41) при подстановке в нее s= 1:
 (48)
(48)
Относительное значение пускового момента kп определяет способность двигателя разгоняться до рабочей частоты вращения с полной нагрузкой на валу и определяется как
kп = Mп/Mном
В ряде случаев вместо (46) удобнее пользоваться формулой, в которой текущий момент двигателя отнесен не к максимальному, а к номинальному моменту. В этом случае
 (49)
(49)
где sкр, sном — значения критического и номинального скольжения двигателя; ρ=r1/r’2 (для двигателей серии 4А с высотой оси вращения 56—132 мм пользуются значением ρ≈1,32).
Если пренебречь величиной r1 (т. е. положить ρ=0), то из (49) следует
 (50)
(50)
Анализ выражения (41) для электромагнитного момента показывает, чт момент зависит от квадрата напряжения сети, что является недостатком асинхронных двигателей. Так, при снижении напряжения на 10 % момент уменьшается на 19%, а при снижении напряжения на 20 % уменьшение момента составляет 36%. На рис. 21 изображены механические характеристики двигателя при номинальном питающем напряжении (естественная характеристика) и при пониженном напряжении.
При уменьшении напряжения, питающего двигатель, который работает под нагрузкой, его вращающий момент снижается. В результате этого происходит снижение частоты вращения двигателя. Частота снижается (и соответственно увеличивается скольжение) до тех пор, пока вращающий момент двигателя не станет равным статическому моменту сопротивления Мс, обусловленному (приводом (соответствующие частоты вращения показаны точками на механических характеристиках рис. 21). При сильном уменьшении напряжения может случиться, что максимальный момент окажется меньше момента сопротивления Мс. В этом случае двигатель опрокидывается, т. е. его частота вращения уменьшается и в конце концов он останавливается. При заторможенном роторе по обмоткам двигателя протекают большие токи, и во избежание аварии сам двигатель должен быть отключен от сети (эти функции выполняет тепловая защита).
Рис. 21. Механические характеристики асинхронного двигателя при различных значениях питающего напряжения
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 – 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Расчет мощности электродвигателя
Преобразование электрической энергии в кинетическую осуществляется при помощи различных типов электродвигателей. Данные устройства нашли широкое применение в современном производстве и в быту. Чаще всего электродвигатели выполняют функцию электроприводов машин и механизмов, применяются для обеспечения работы насосного оборудования, вентиляционных систем и многих других агрегатов и устройств. В связи с таким широким применением, особую актуальность приобретает расчет мощности электродвигателя. Для этих целей разработано много различных методов, позволяющих выполнить расчеты, применительно к конкретным условиям эксплуатации.
Основные типы электродвигателей
Существует множество типов и модификаций электродвигателей. Каждый из них обладает собственной мощностью и другими параметрами.
Основная классификация разделяет эти устройства на электродвигатели постоянного и переменного тока. Первый вариант применяется значительно реже, поскольку для его эксплуатации требуется обязательное наличие источника постоянного тока или устройства, преобразующего переменное напряжение в постоянный ток. Выполнение данного условия в современном производстве потребует значительных дополнительных затрат.

Но, несмотря на существенные недостатки, двигатели постоянного тока имеют высокий пусковой момент и стабильно работают даже при больших перегрузках. Благодаря своим качествам, эти агрегаты нашли широкое применение на электротранспорте, в металлургической и станкостроительной отрасли.
Тем не менее, большинство современного оборудования работает с двигателями переменного тока. В основе действия этих устройств лежит электромагнитная индукция, которую создает в магнитном поле проводящая среда. Магнитное поле создается с помощью обмоток, обтекаемых токами, или с применением постоянных магнитов. Электродвигатели, работающие на переменном токе, могут быть синхронными и асинхронными.

Использование синхронных электродвигателей практикуется в оборудовании, где требуется постоянная скорость вращения. Это генераторы постоянного тока, насосы, компрессоры и другие аналогичные установки. Различные модели отличаются собственными техническими характеристиками. Например, значение скорости вращения может находиться в пределах 125-1000 оборотов в минуту, а мощность достигает 10 тыс. киловатт.
Во многих конструкциях имеется короткозамкнутая обмотка, расположенная на роторе. С ее помощью, в случае необходимости, производится асинхронный пуск, после чего синхронный двигатель продолжает работу в обычном режиме, максимально сокращая потери электрической энергии. Эти двигатели отличаются небольшими размерами и высоким коэффициентом полезного действия.

Гораздо более широкое распространение в производственной сфере получили асинхронные двигатели переменного тока. Они отличаются очень высокой частотой вращения магнитного поля, значительно превышающей скорость вращения ротора. Существенным недостатком этих устройств считается снижение КПД до 30-50% от нормы при низких нагрузках. Кроме того, во время пуска параметры тока становятся в несколько раз больше по сравнению с рабочими показателями. Данные проблемы устраняются путем использования частотных преобразователей и устройств плавного пуска.
Асинхронные двигатели используются на тех объектах, где требуются частые включения и выключения оборудования, например, в лифтах, лебедках, и других устройствах.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.

Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Расчет мощности электродвигателя для насоса
Выбор электродвигателя для насосной установки зависит от конкретных условий, прежде всего – от схемы водоснабжения. В большинстве случаев подача воды производится с помощью водонапорного бака или водонапорного котла. Для приведения в действие всей системы используются центробежные насосы с асинхронными двигателями.

Выбор оптимальной мощности насоса осуществляется в зависимости от потребности в подаче и напоре жидкости. Подача насоса QH измеряется в литрах, подаваемых в 1 час, и обозначается как л/ч. Данный параметр определяется по следующей формуле: Qн = Qmaxч = (kч х kсут х Qср.сут) / (24 η), где Qmaxч — возможный максимальный часовой расход воды, л/ч, kч – коэффициент неравномерности часового расхода, kсут — коэффициент неравномерности суточного расхода (1,1 – 1,3), η — КПД насосной установки, с учетом потерь воды), Qср.сут — значение среднесуточного расхода воды (л/сут).
Оптимальный напор воды должен обеспечивать ее подачу в установленное место при условии необходимого давления. Требуемые параметры напора насоса (Ннтр) зависят от высоты всасывания (Нвс) и высоты нагнетания (Ннг), которые в сумме определяют показатели статического напора (Нс), потери в трубопроводах (Hп) и разность давлений верхнего (Рву) и нижнего (Рну) уровней.
Исходя из того, что значение напора будет равно H = P/ρg, где Р — давление (Па), ρ — плотность жидкости (кг/м 3 ), g = 9,8 м/с2 — ускорение свободного падения, g — удельный вес жидкости (кг/м 3 ), получается следующая формула: Ннтр = Hc + Hп + (1/ρ) х (Рву – Рну).

После вычисления расхода воды и напора по каталогу уже можно выбрать насос с наиболее подходящими параметрами. Чтобы не ошибиться с мощностью электродвигателя, ее нужно определить по формуле: Pдв = (kз х ρ х Qн х Нн) / (ηн х ηп), где kз является коэффициентом запаса, зависящим от мощности электродвигателя насоса и составляет 1,05 – 1,7. Этот показатель учитывает возможные утечки воды из трубопровода из-за неплотных соединений, разрывов трубопровода и прочих факторов, поэтому электродвигатели для насосов должны иметь некоторый запас мощности. Чем больше мощность, тем меньше коэффициент запаса можно принять.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Расчет мощности двигателя формула для компрессора
Выбирая электродвигатель, наиболее подходящий для работы того или иного компрессора, необходимо учитывать продолжительный режим работы данного механизма и постоянную нагрузку. Расчет требующейся мощности двигателя Рдв осуществляется в соответствии с мощностью на валу основного механизма. В этом случае следует учитывать потери, возникающие в промежуточном звене механической передачи.

Дополнительными факторами являются мощности, назначение и характер производства, на котором будет эксплуатироваться компрессорное оборудование. Они оказывают определенное влияние, в связи с чем оборудование может потребовать незначительных, но постоянных регулировок для поддержки производительности на должном уровне.
Определить мощность двигателя можно по формуле: , в которой:
- Q – значение производительности или подачи компрессора (м 3 /с);
- А – работа по совершению сжатия (Дж/м 3 );
- ηк – индикаторный КПД (0,6-0,8) для учета потерь мощности при реальном сжатии воздуха;
- ηп – механический КПД (0,9-0,95) учитывающий передачу между двигателем и компрессором;
- кз– коэффициент запаса (1,05-1,15) для учета факторов, не поддающихся расчетам.
Работа А рассчитывается по отдельной формуле: А = (Аи + Аа)/2, где Аи и Аа представляют собой соответственно изотермическое и адиабатическое сжатие.
Значение работы, которую необходимо совершить до появления требуемого давления, можно определить с помощью таблицы:
Расчет мощности электродвигателя
Расчет мощности электродвигателя по току можно произвести с помощью нашего онлайн калькулятора:
Полученный результат можно округлить до ближайшего стандартного значения мощности.
Стандартные значения мощностей электродвигателей: 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75 кВт и т.д.
Расчет мощности двигателя производится по следующей формуле:
P=√3UIcosφη
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
Сравниваем габаритные размеры
Если нет таблички или на ней сложно что-то прочитать, то можно определить мощность асинхронного электродвигателя без паспорта по габаритам, а именно по диаметру вала.
Этот способ определения используют на практике чаще остальных, поскольку нужно только измерить вал штангенциркулем и не нужно подключение к сети. После измерения диаметра, полученные значения сравнивают с таблицей и определяют приблизительную мощность. Такой способ позволяет получить достаточно точные характеристики без бирки. Таблица для этого приведена ниже.

Такой способ определения мощности электродвигателя по габаритам (по ротору) подходит как для трёхфазных, так и однофазных асинхронных двигателей
Обратите внимание «P» указана в кВт (киловатты), как принято в электротехнике, а не как в физике — в ваттах

Если вам по каким-то причинам не подходят данные из этой таблицы, то есть другой способ узнать мощность электродвигателя по габаритным размерам, нужно измерить:
- диаметр вала;
- частоту его вращения (число пар полюсов);
- крепежные размеры;
- диаметр фланца или ширину крепежных лап;
- высота до центра вала;
- длина мотора (без выступающей части вала).
И сравнить эти данные с размерами электромашин единой серии 4А, АИР, А, АО. Их можно найти в разных справочниках или каталогах компаний, которые их производят.
Чтобы определить мощность двигателя распространенной серии АИР по крепежным отверстиям на лапах, воспользуйтесь этой таблицей.

Для определения мощности электродвигателя по диаметру фланца (D20) и диаметру крепежных отверстий фланца (D22) используйте следующие данные:

Со временем и практикой вы научитесь приблизительно определять мощность двигателя по внешнему виду, мысленно сравнивая с теми, которыми сталкивались раньше, но для этого нужно знать ряд стандартных номиналов электродвигателей: 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11; 15; 18,5; 22; 30; 37; 45; 55; 75 кВт.
Расчет тока электродвигателя
Расчет номинального и пускового тока электродвигателя по мощности можно произвести с помощью нашего онлайн калькулятора:
Расчет номинального тока двигателя производится по следующей формуле:
Iном=P/√3Ucosφη
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
Расчет пускового тока электродвигателя производится по формуле:
Iпуск=Iном*K
- К — Кратность пускового тока, данная величина берется из паспорта электродвигателя, либо из каталожных данных (в приведенном выше онлайн калькуляторы кратность пускового тока определяется приблизительно исходя из прочих указанных характеристик электродвигателя).
Расчёты основных параметров асинхронного электродвигателя
Активная мощность тратится на выполнение полезной работы и создание тепла. Обозначается буквой «P», измеряется в W и вычисляется:
P=I*U*cosφ.
Реактивная мощность создаётся колебаниями энергии электрического поля. Она обуславливает способность деталей реактивной машины сохранять и излучать электромагнитную энергию. Речь идёт о токе, который заряжает конденсатор или создает магнитное поле вокруг витков обмотки катушки. Обозначается буквой «Q», измеряется в Var и рассчитывается:
Q=I*U*sinφ.
Полная мощность «S» представляется математической комбинацией по формуле теоремы Пифагора: S*S = Q*Q + P*P. Она измеряется в V*A и вычисляется:
S = P / cosφ = √(P2 + Q2)=I*U.
Реактивную мощность трехфазного асинхронного двигателя можно представить суммой двух составляющих: индуктивной и емкостной.
Лучшее представление данной величины может быть получено в виде векторной диаграммы, индуктивная составляющая – это положительная координата на оси Y, емкостная – отрицательная. Очевидно, что эти два значения несколько компенсируют друг друга, составляя координату вектора, которая будет либо положительной, либо отрицательной. Чем меньше угол между ними, тем полная мощность становится ближе к активной.
Коэффициент мощности cosφ для трёхфазного асинхронного двигателя равен 0,8–0,9. Если его необходимо увеличить, то довольно часто добавляют конденсаторы в цепи двигателя. Функция этих конденсаторов заключается в том, чтобы обеспечить намагничивающий ток, снижающий амплитуду реактивной составляющей. Чем выше cosφ, тем меньше электромашина потребляет энергии.
Расчет коэффициента мощности электродвигателя
Онлайн расчет коэффициента мощности (cosφ) электродвигателя
Расчет cosφ (косинуса фи) двигателя производится по следующей формуле:
cosφ=P/√3UIη
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- η — Коэффициент полезного действия — отношение электрической мощности потребляемой электродвигателем из сети к механической мощности на валу двигателя (принимается от 0,7 до 0,85 в зависимости от мощности электродвигателя);
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.

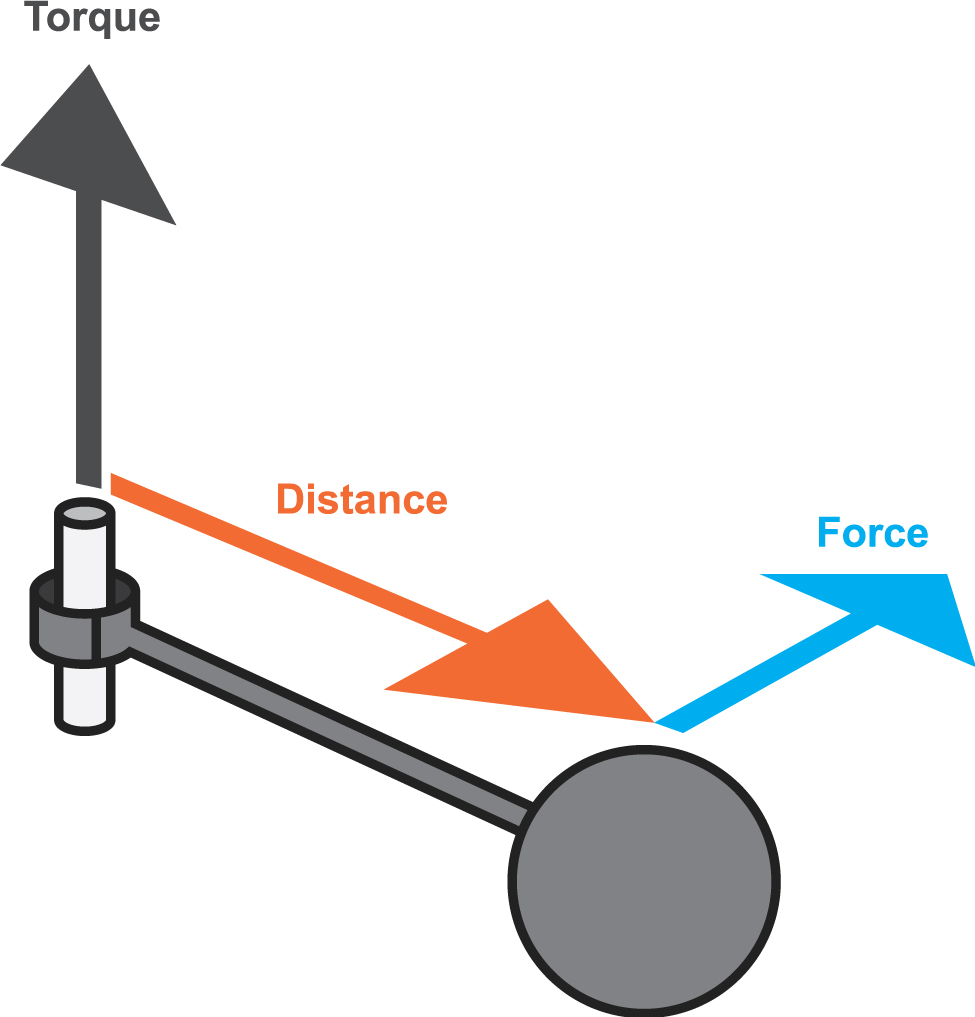
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Расчет КПД электродвигателя
Онлайн расчет КПД (коэффициента полезного действия) электродвигателя
Расчет коэффициента полезного действия электродвигателя производится по следующей формуле:
η=P/√3UIcosφ
- P — Номинальная мощность электродвигателя (берется из паспортных данных электродвигателялибо определяется рассчетным путем);
- U — Номинальное напряжение (напряжение на которое подключается электродвигатель);
- I — Номинальный ток электродвигателя (берется из паспортных данных электродвигателя, а при их отсутствии определяется расчетным путем);
- cosφ — Коэффициент мощности — отношение активной мощности к полной (принимается от 0,75 до 0,9 в зависимости от мощности электродвигателя);
Оказались ли полезны для Вас данные онлайн калькуляторы? Или может быть у Вас остались вопросы? Напишите нам в комментариях!
Не нашли на сайте статьи на интересующую Вас тему касающуюся электрики? Напишите нам здесь. Мы обязательно Вам ответим.
Двигатели постоянного тока
Исходя из принципа механики Ньютона, утверждающего, что всякое движение относительно, электродвигатель постоянного тока можно назвать синхронной машиной. Хотя магнитные поля статора и ротора в ней неподвижные, а вращение вала происходит за счет эффекта отталкивания одноименных полюсов магнитов и притягивания разноименных.

На них через угольные щетки подается постоянный ток. Во время вращения вала происходит переключение полюсов между парами. Магнитное поле статора может создаваться металлами с остаточным магнетизмом или прохождением тока по обмоткам. Последние применяются в электрических машинах большой мощности.
Их достоинством является большой коэффициент полезного действия, до 98%, а также стабильно высокий вращающий момент и малая зависимость от перегрузок. Двигатели постоянного тока отлично подходят для привода подъемных механизмов, а также в качестве тяговых на электротранспорте.
Ими очень просто управлять: для снижения скорости вращения надо лишь уменьшить величину подаваемого напряжения, а для реверсирования достаточно сменить полярность. Недостатком является сложность устройства и невысокая надежность щеточного узла, его склонность к искрению и шумность. Кроме того, постоянное напряжение сложно передавать на большие расстояния, из-за чего нет магистральных линий такого типа. Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь.
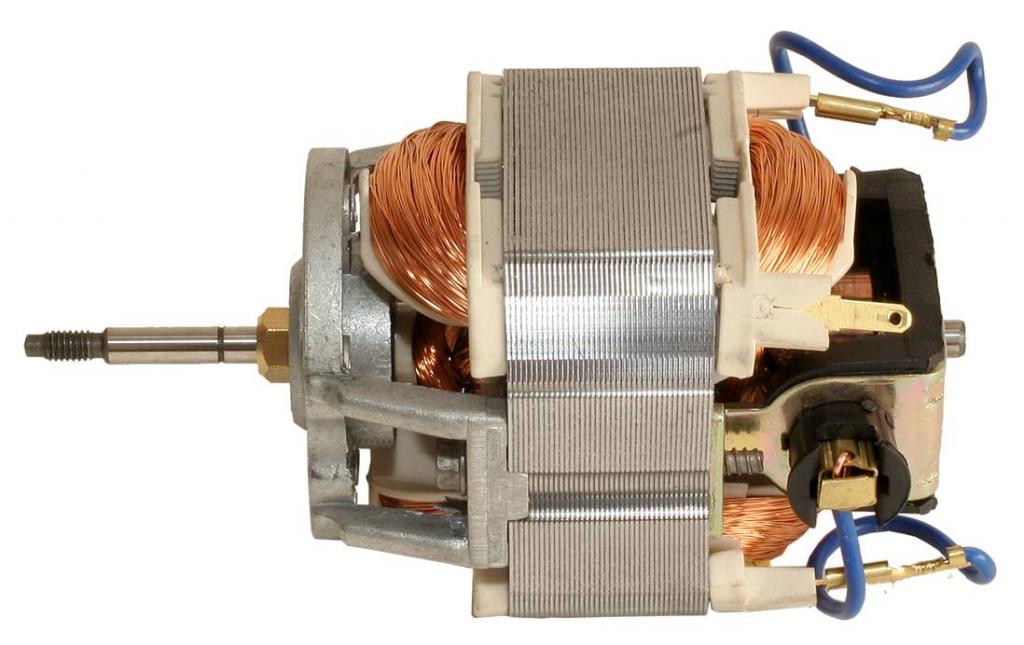
Коллекторные двигатели
По своей конструкции они аналогичны двигателям постоянного тока. Однако питаются переменным однофазным током. Статорная обмотка возбуждения у них включена последовательно с обмоткой якоря. Вращение вала происходит за счет синхронной смены полюсов магнитного поля в статорной и роторной обмотках.
К перечисленным выше достоинствам – большому вращающему моменту, нечувствительности к перегрузкам, стоит отнести и то, что это единственная электрическая машина переменного тока, которой можно без проблем управлять.
Для изменения скорости вращения вала достаточно уменьшить питающее напряжение, а для реверсирования поменять местами точки подключения коллекторного узла со статорной обмоткой. Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах.
Например, в стиральных машинах, дрелях и другом электрифицированном инструменте. К недостаткам, основным из которых является сложность и малая надежность щеточного узла, стоит отнести и невозможность подключения трехфазного напряжения. Просто потому, что в этом случае щеток должно быть шесть. Это ограничивает максимальную мощность двигателей: у однофазных машин при напряжении 220 вольт это значение не бывает более 2,5 киловатта.
Синхронные электродвигатели переменного тока

Что лучше: мощность или крутящий момент
Мощность и крутящий момент двигателя – величины взаимосвязанные. Это хорошо видно в формуле из первого пункта.
Пик крутящего момента на графике зависимости от частоты вращения мотора появляется раньше, чем пик мощности. Это справедливо как для дизельных, так и для бензиновых моторов. Однако у дизелей крутящий момент достигается раньше, и плато (интервал частоты вращения при пиковом значении) длиннее. У бензиновых ДВС мощность выше, хотя для ее достижения нужно раскрутить мотор почти до максимальных оборотов.
Сказать определенно, что лучше: мощность или крутящий момент, нельзя. Все зависит от случая. Трансмиссия современного авто способна трансформировать эти величины под требуемые условия. Поясним на примерах.
Для тяжелой техники, которой важна тяга в широком диапазоне оборотов, важнее крутящий момент. Мотор должен хорошо тянуть. Раскручивать его до предельных оборотов не нужно. Отчасти поэтому почти вся коммерческая техника оснащается дизельными моторами.
В гоночных автомобилях важнее мощность. Моторы этих авто по оборотам пилоты во время заездов держат в красной зоне. Двигатель отдает максимальную мощность. А трансмиссия преобразовывает мощность в тягу.
Для гражданских авто важен стиль вождения. Для езды на автомате подойдут оба мотора. Автоматическая трансмиссия будет держать мотор в диапазоне оборотов, при которых двигатель отдает максимум своего потенциала.

Для агрессивной езды на механике с раскручиванием двигателя в красную зону тахометра лучше подойдет бензиновый мотор. Но в этом случае нужно понимать, что для получения максимальной производительности от мотора потребуется держать его на пике оборотов и часто переключать передачи. Пик мощности у бензинового ДВС имеет малый диапазон и находится около максимальных оборотов. Для уверенных обгонов и ускорений нужно будет понижать передачу и раскручивать двигатель.
Асинхронные электрические машины
В них магнитное поле ротора является порождением вращающегося магнитного поля статора. Поскольку между этими деталями машины есть воздушный зазор, передача энергии между ними происходит с потерями. Поэтому фаза тока в роторе отстает от фазы тока в статоре на небольшой угол (не более 100), который определяет величину коэффициента мощности cosφ. Это отставание и является причиной того, что электрическую машину этого типа называют асинхронной.
Двигатели с короткозамкнутым ротором
Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.

Для изменения скорости вращения необходимо менять частоту питающего напряжения или количество статорных обмоток, которое определяет количество полюсов электромагнита – чем их больше, тем она ниже. Также электродвигателям с короткозамкнутым ротором свойственен большой пусковой ток, перегружающий сеть, а также резкий рост вращающего момента при подключении питания, что может вызвать поломку редуктора привода.
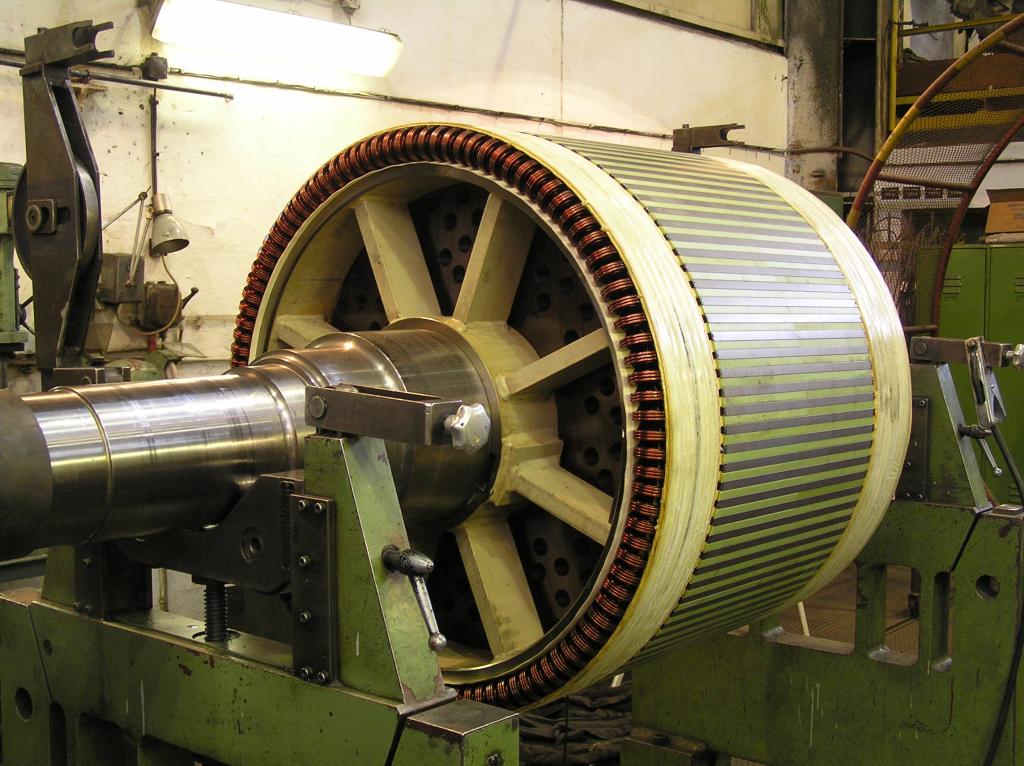
Двигатели с фазным ротором
Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети. Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.

Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%.
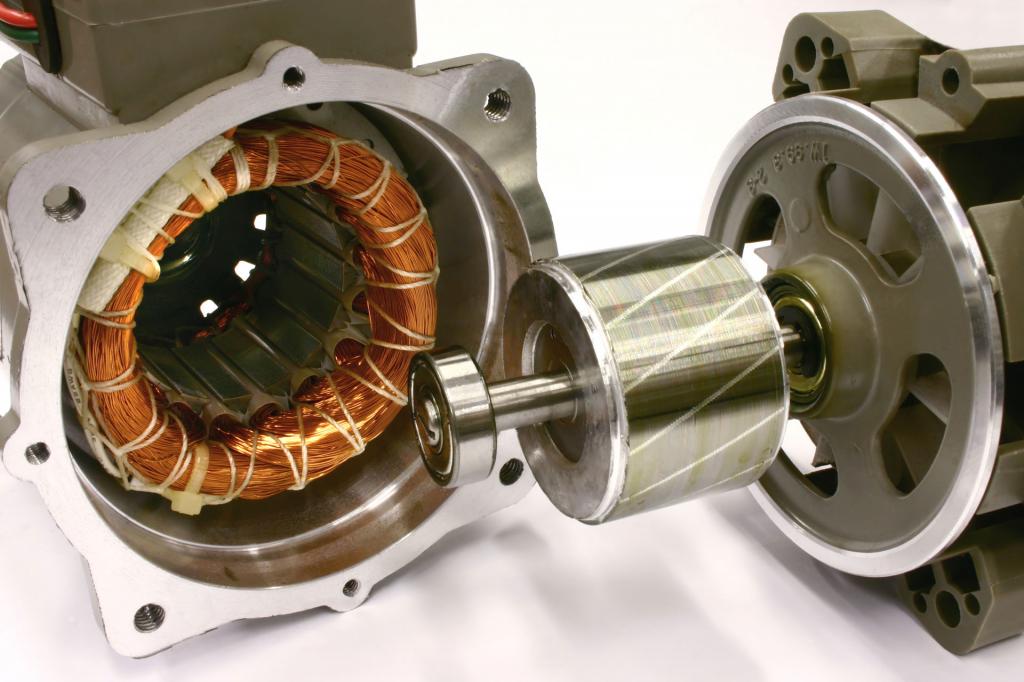
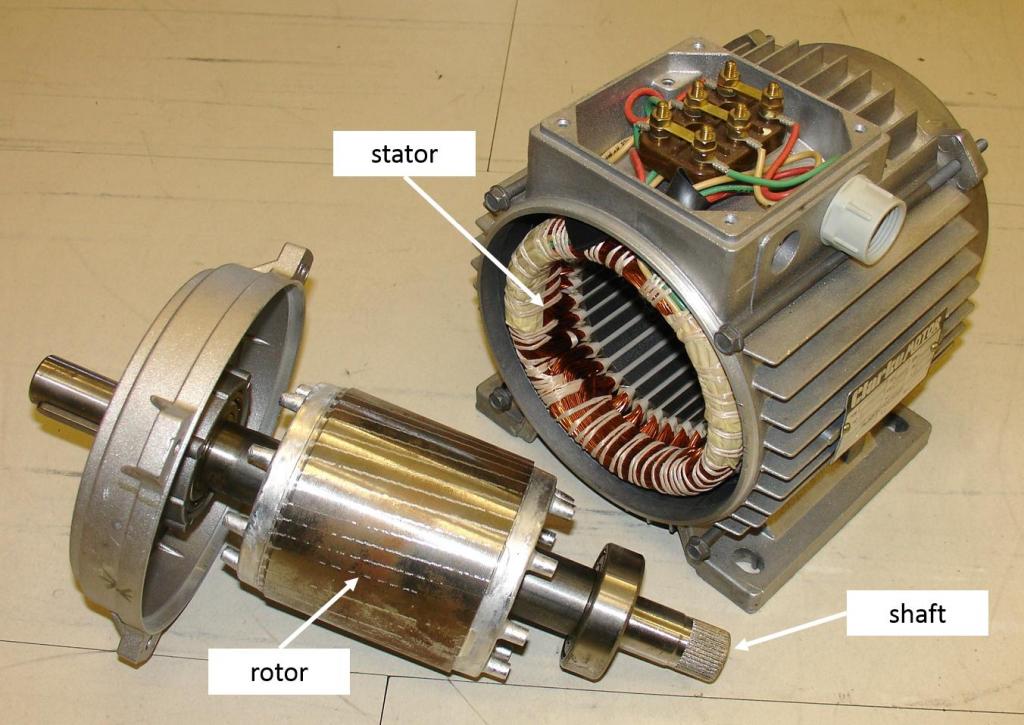
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.

Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Канал ДНЕВНИК ПРОГРАММИСТА
Жизнь программиста и интересные обзоры всего. Подпишись, чтобы не пропустить новые видео.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.

Вам будет интересно:Корневое давление — это важный параметр в жизни растения
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.

В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.

Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
P = U х I,
где P — мощность, U — напряжение, I — сила тока.
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор — единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор — расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
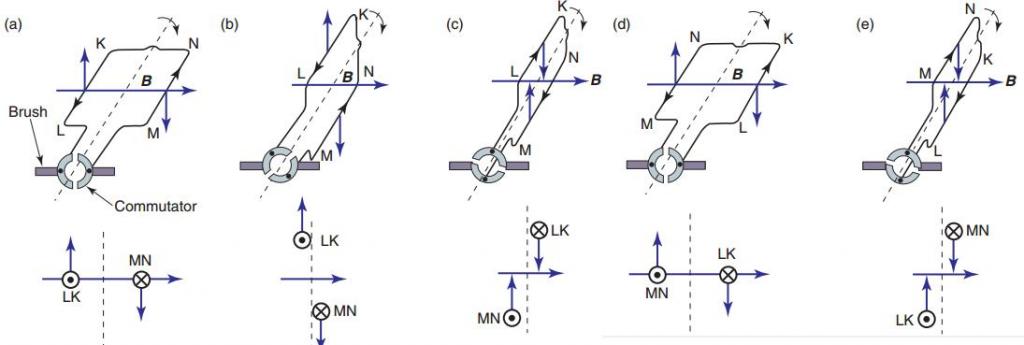
Принцип действия
По закону Архимеда ток в проводнике создает магнитное поле, в котором действует сила F1. Если из этого проводника изготовить металлическую рамку и поместить ее в поле под углом 90°, то края будут испытывать силы, направленные в противоположную сторону относительно друг друга. Они создают крутящий момент относительно оси, который начинает ее вращать. Витки якоря обеспечивают постоянное кручение. Поле создается электрическими или постоянными магнитами. Первый вариант выполнен в виде обмотки катушки на стальном сердечнике. Таким образом, ток рамки генерирует индукционное поле в обмотке электромагнита, которое порождает электродвижущую силу.
Рассмотрим более подробно работу асинхронных двигателей на примере установок с фазным ротором. Такие машины работают от переменного тока с частотой вращения якоря, не равной пульсации магнитного поля. Поэтому их еще называют индукционными. Ротор приводится в движение за счет взаимодействия электрического тока в катушках с магнитным полем.
Когда во вспомогательной обмотке отсутствует напряжение, устройство находится в состоянии покоя. Как только на контактах статора появляется электрический ток, образуется постоянное в пространстве магнитное поле с пульсацией +Ф и -Ф. Его можно представить в виде следующей формулы:
nпр = nобр = f1 × 60 ÷ p = n1
где:
nпр — количество оборотов, которое совершает магнитное поле в прямом направлении, об/мин;
nобр — число оборотов поля в обратном направлении, об/мин;
f1 — частота пульсации электрического тока, Гц;
p — количество полюсов;
n1 — общее число оборотов в минуту.
Испытывая пульсации магнитного поля, ротор получает начальное движение. По причине неоднородности воздействия потока, он будет развиваться крутящий момент. По закону индукции, в короткозамкнутой обмотке образуется электродвижущая сила, которая генерирует ток. Его частота пропорциональна скольжению ротора. Благодаря взаимодействию электрического тока с магнитным полем создается крутящий момент вала.
Для расчетов производительности существуют три формулы мощности асинхронного электродвигателя. По сдвигу фаз используют
S = P ÷ cos (alpha), где:
S — полная мощность, измеряемая в Вольт-Амперах.
P — активная мощность, указываемая в Ваттах.
alpha — сдвиг фаз.
Под полной мощностью понимаются реальный показатель, а под активной — расчетный.
Виды электродвигателей
По источнику питания приводы разделяют на работающие от:
- Постоянного тока.
- Переменного тока.
По принципу работы их, в свою очередь, делят на:
- Коллекторные.
- Вентильные.
- Асинхронные.
- Синхронные.
Вентильные двигатели не относят к отдельному классу, так как их устройство является вариацией коллекторного привода. В их конструкцию входит электронный преобразователь и датчик положения ротора. Обычно их интегрируют вместе с платой управления. За их счет происходит согласованная коммутация якоря.
Синхронные и асинхронные двигатели работают исключительно от переменного тока. Управление оборотами происходит с помощью сложной электроники. Асинхронные делятся на:
- Трехфазные.
- Двухфазные.
- Однофазные.
Теоретическая формула мощности трехфазного электродвигателя при соединении в звезду или треугольником
P = 3 * Uф * Iф * cos(alpha).
Однако для линейных значений напряжения и тока она выглядит как
P = 1,73 × Uф × Iф × cos(alpha).
Это будет реальный показатель, сколько мощности двигатель забирает из сети.
Синхронные подразделяются на:
- Шаговые.
- Гибридные.
- Индукторные.
- Гистерезисные.
- Реактивные.
В своей конструкции шаговые двигатели имеют постоянные магниты, поэтому их не относят к отдельной категории. Управление работой механизмов производится с помощью частотных преобразователей. Существуют также универсальные двигатели, которые функционируют от постоянного и переменного тока.
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Вращательный момент
Этот термин имеет несколько синонимов: момент силы, момент двигателя, Вращательный момент, вертящий момент. Все они используются для обозначения одного показателя, хотя с точки зрения физики эти понятия не всегда тождественны.
В целях унификации терминологии были разработаны стандарты, которые приводят все к единой системе. Поэтому в технической документации всегда используются словосочетание «крутящий момент». Он представляет собой векторную физическую величину, которая равна произведению векторных значений силы и радиуса. Вектор радиуса проводится от оси вращения к точке приложенной силы. С точки зрения физики разница между крутящим и вращательным моментом заключается в точке прикладывания силы. В первом случае это внутреннее усилие, во втором — внешнее. Измеряется величина в ньютон-метрах. Однако в формуле мощности электродвигателя крутящий момент используется как основное значение.
Рассчитывается он как
M = F × r, где:
M — крутящий момент, Нм;
F — прикладываемая сила, H;
r — радиус, м.
Для расчета номинального вращающего момента привода используют формулу
Мном = 30Рном ÷ pi × нном, где:
Рном — номинальная мощность электрического двигателя, Вт;
нном — номинальное число оборотов, мин-1.
Соответственно, формула номинальной мощности электродвигателя бедует выглядеть следующим образом:
Рном = Мном * pi*нном / 30.
Обычно все характеристики указаны в спецификации. Но бывает, что приходится работать с совершенно новыми установками, информацию о которых найти очень сложно. Для расчета технических параметров таких устройств берут данные их аналогов. Также всегда известны только номинальные характеристики, которые даются в спецификации. Реальные данные необходимо рассчитывать самостоятельно.
Мощность двигателя
В общем смысле данный параметр представляет собой скалярную физическую величину, которая выражена в скорости потребления или преобразования энергии системы. Он показывает, какую работу механизм выполнит за определенную единицу времени. В электротехнике характеристика отображает полезную механическую мощность на центральном вале. Для обозначения показателя используют литеру P или W. Основной единицей измерения является Ватт. Общая формула расчета мощности электродвигателя может быть представлена как:
P = dA ÷ dt, где:
A — механическая (полезная) работа (энергия), Дж;
t — затраченное время, сек.
Механическая работа также является скалярной физической величиной, выражаемой действием силы на объект, и зависящей от направления и перемещения этого объекта. Она представляет собой произведение вектора силы на путь:
dA = F × ds, где:
s — пройденное расстояние, м.
Она выражает дистанцию, которую преодолеет точка приложенной силы. Для вращательных движений она выражается как:
ds = r × d(teta), где:
teta — угол оборота, рад.
Таким образом можно вычислить угловую частоту вращения ротора:
omega = d(teta) ÷ dt.
Из нее следует формула мощности электродвигателя на валу: P = M × omega.
Коэффициент полезного действия электромотора
КПД — это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как «eta» и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
eta = P2 ÷ P1, где:
P1 — электрическая (подаваемая) мощность, Вт;
P2 — полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A — полезная работа, Дж;
Q — затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n — частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
P = M × (2pi × n ÷ 60) = M × (n ÷ 9,55), где
t = 60 секунд.
Момент инерции
Этот показатель представляет собой скалярную физическую величину, которая отражает меру инертности вращательного движения вокруг собственной оси. При этом масса тела является величиной его инертности при поступательном движении. Основная характеристика параметра выражена распределением масс тела, которая равна сумме произведений квадрата расстояния от оси до базовой точки на массы объекта.В Международной системе единиц измерения он обозначается как кг·м2 и имеет рассчитывается по формуле:
J = ∑ r2 × dm, где
J — момент инерции, кг·м2 ;
m — масса объекта, кг.
Моменты инерции и силы связаны между собой соотношением:
M — J × epsilon, где
epsilon — угловое ускорение, с-2.
Показатель рассчитывается как:
epsilon = d(omega) × dt.
Таким образом, зная массу и радиус ротора, можно рассчитать параметры производительности механизмов. Формула мощности электродвигателя включает в себя все эти характеристики.
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
P = U × I.
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
te = L ÷ R.
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
M = Mст + J × (d(omega) ÷ dt), где
Mст = 0.
Отсюда получаем формулу:
M = J × (d(omega) ÷ dt).
По факту электромеханическую константу времени рассчитывают по пусковому момент — Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
M = Mп × (1 — omega ÷ omega0), где
omega0 — скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
Pэл = U × I, где
I — сила тока, А;
U — напряжение, В;
Pэл — подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Pэл = U × I × cos(alpha).
Кроме активной (подведенной) мощности существует также:
- S — реактивная, ВА. S = P ÷ cos(alpha).
- Q — полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = Pмех + Ртеп +Ринд + Ртр, где
Рмех — полезная вырабатываемая мощность, Вт;
Ртеп — потери на образование тепла, ВТ;
Ринд — затраты на заряд в индукционной катушке, Вт;
Рт — потери в результате трения, Вт.
Заключение
Электродвигатели находят применение практически во всех областях жизни человека: в быту, в производстве. Для правильного использования привода необходимо знать не только его номинальные характеристики, но и реальные. Это позволит повысить его эффективность и снизить затраты.

Мощность асинхронного двигателя
Мощность асинхронного электродвигателя – является основным техническим параметром этого типа устройств, который влияет на сферу использования и выполняемые задачи.
Асинхронные двигатели могут иметь идентичную мощность, но различаться по частоте вращения вала, что существенно влияет на его габаритные размеры.

Асинхронный двигатель имеет три формулы для вычисления мощности:
- активной (P)
- реактивной (Q)
- полной (S)
Полная мощность (S) определяется в Вольт-Амперах (ВА). Определяется произведением напряжения на ток системы. Принято считать, что полная мощность это комплексное число, в котором активная мощность – это действительная часть, а реактивная – мнимая.
Формулы для определения полной мощности асинхронного двигателя:
S = P / cosφ = √(P2 + Q2)=I*U
І – действующее значение тока;
U – действительное значение напряжения;
φ – сдвиг фаз.
Активная мощность (Р) измеряется в Ваттах (Вт). Это мощность, которая потребляется сопротивлением системы на полезную работу и тепло.
Формула определения активной мощности асинхронного двигателя:
P=I*U*cosφ
І – действующее значение тока;
U – действительное значение напряжения;
φ – сдвиг фаз.
Реактивная мощность (Q) измеряется в реактивных Вольт-Амперах (ВА). Это электромагнитная мощность, которую колебательный контур системы запасает и отдает обратно в сеть. В идеале такая мощность не выполняет работы.
Формула:
Q=I*U*sinφ
І – действующее значение тока;
U – действительное значение напряжения;
φ – сдвиг фаз.