
Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:
Методичка по электротехнике.pdf
Скачиваний:
519
Добавлен:
02.04.2015
Размер:
2.91 Mб
Скачать
|
В двигательном |
режиме частота |
вращения |
ротора (n) всегда мень- |
|
|
ше частоты |
вращения |
магнитного поля |
статора |
(n1 ). Эта особенность и |
|
определяет |
название |
двигателя асинхронный. |
||
|
Величина, характеризующая разность частот вращения ротора и маг- |
||||
|
нитного поля статора, |
выраженная в относительных единицах или про- |
|||
|
центах, называется скольжением |
|
s= ( n1 n )/ n1 , |
s ((n |
n) / n )100 % . |
|
1 |
1 |
Из приведенной формулы следует, что скольжение асинхронного двигателя изменяется в диапазоне 0 s 1.
В режиме работы двигателя без нагрузки на валу (режим холостого хода) ротор вращается с частотой лишь немного меньше частоты вращения магнитного поля, которую в дальнейшем будем называть синхронной частотой. В этом случае скольжение весьма мало отличается от нуля. Однако ток холостого хода статора примерно на порядок больше тока холостого хода трансформатора. Напомним, что ток холостого хода трансформатора составляет (2…8) % от номинального значения тока первичной обмотки. Ток холостого хода двигателя составляет (20…40) % от номинального тока статора. Такое увеличение тока холостого хода объясняется тем, что воздушный зазор между статором и ротором увеличивает магнитное сопротивление цепи двигателя для магнитного потока.
Скольжение, соответствующее номинальной нагрузке двигателя, называют номинальным скольжением. Для асинхронных двигателей номинальное скольжение составляет (1…8) %. Меньшие значения соответствуют двигателям большей мощности, большие значения скольжения соответствуют двигателям малой мощности.
Частота вращения ротора (об/мин) может быть определена, если известны синхронная частота магнитного поля статора и скольжение:
n = n1 ( 1 s ) .
Например, для двигателя общепромышленного назначения (f =50 Гц), имеющего четыре полюса и номинальное скольжение 4 %, частота вращения
|
ротора равна n = 6 0 f |
( 1 s )/ p = 3000(1 0,04 )/ 2 = 1440 об/мин. Часто- |
|
|
та |
тока в обмотке |
ротора, пропорциональная абсолютной разности |
синхронной частоты и частоты вращения ротора, называется частотой
|
скольжения. |
Ее значение вычисляется по формуле f2 = ( n1 n ) р / 60 , Гц. |
|
Если |
числитель и знаменатель выражения для частоты скольжения |
умножить на значение синхронной частоты, то получим возможность вы-
181

|
числять частоту |
скольжения |
через известные значения частоты питаю- |
|
щего напряжения |
и величину |
скольжения: |
|
f2 = ( n1 n ) n 1 ּ р / 60ּn1 = r1 ּ s. |
Для f1 = 50 Гц и скольжения s = (2…8) % частота f2 = 1…4 Гц.
Влияние частоты скольжения проявляется на параметрах ротора: ЭДС и реактивном сопротивлении. Выражение для ЭДС обмотки ротора имеет вид E2S = 4,44w2f2Фmкoб, где коб коэффициент, учитывающий специфику выполнения обмотки ротора (обмоточный коэффициент).
Вслучае неподвижного ротора, когда s = 1, частота скольжения f2 равна частоте питающего двигатель напряжения. Поэтому E2S = E2.
Вслучае вращающегося ротора, когда f2 = f1 s, выражение для ЭДС при-
мет вид E2S = 4,44w2fФmko6s = E2 ּs.
Аналогичную связь можно установить и между индуктивными сопротивлениями неподвижного x2S и вращающегося ротора х2:
x2S = x2ּs
Пример 13.1. Для трехфазного асинхронного двигателя известно, что при частоте f1 = 50 Гц. ЭДС и индуктивное сопротивление неподвижного ротора равны: Е2 =120 В., х2 =130 Ом.
Определить значения f2S, Е2S и х2S при скольжении s = 4 % . Воспользовавшись вышеприведенными формулами, получим:
f2S = f1 ּs = 2 Гц; E2S = E2 ּs = 4,8 В; x2 = x2ּs = 5,2 Ом.
13.5. Механическая мощность асинхронного двигателя
Трехфазный асинхронный двигатель нагружает питающую активной мощностью Р1 = 3UФIФcosφФ =  3U лI л cos Ф . Здесь индексом » ф » обозначены
3U лI л cos Ф . Здесь индексом » ф » обозначены
фазные значения напряжения и тока обмотки статора; индексом » л » линейные значения напряжения питающей сети и тока, потребляемого двигателем.
Вдальнейшем будем обозначать индексом 1 параметры обмотки статора,
аиндексом 2 параметры обмотки ротора.
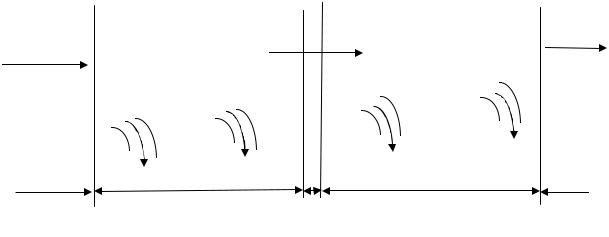
Процесс преобразования электрической энергии в механическую наиболее просто показать в виде энергетической диаграммы (рис. 13.8). На каждой ступени передачи происходят соответствующие потери энергии, обозначенные отдельными ручейками. Эта энергия считается потерянной, а отдельные ее составляющие называются потерями мощности.
На основании энергетической диаграммы двигателя можно определить механическую мощность РМЕХ, отдаваемую двигателем, путем вычитания из
182
Зазор
подведенной от сети мощности потерь на всех ступенях передачи. К ним относятся потери в обмотке статора, стали сердечника и потери в обмотке ротора.
Уравнение энергетического баланса двигателя запишем в виде
РМЕХ = 3U1I1 соsφ1 — 3I1 r12 pCT m2 I 2 r12 ,
где m2 число фаз обмотки ротора в случае фазного способа его исполнения или число стержней ротора, деленное на два, если обмотка ротора выполнена короткозамкнутой; рСТ потери в стали статора.
Потерями в стали ротора обычно пренебрегают по причине малой частоты тока ротора.
Электромагнитная мощность Рэм, передаваемая ротору, определяется произведением числа фаз, ЭДС, тока и коэффициента мощности ротора. Часть этой мощности выделяется в роторе в виде теплоты.
|
Р1 |
РЭМ |
Р2 |
|||||||||||||
|
рМ2 |
рМХ |
||||||||||||||
|
рСТ |
рМ1 |
Ротор |
Вал |
||||||||||||
|
Сеть |
Статор |
Рис. 13.8
Таким образом, механическую мощность асинхронного двигателя можно определить как разность между электромагнитной мощностью и потерями в обмотке ротора:
Рмех = m2Е2I2соsφ2 — m2 I 22 r2 .
Это уравнение можно представить в ином виде, если учесть, что Е2 = E2S / s, а произведение E2S соsφ2 = I 22 r2 определяет активную составляющую ЭДС ротора. На основании изложенного выражение для механической мощности примет вид Рмех = m2 I 22 r2 / s m2 I 22 r2, или после некоторого преобразования окончательно запишем:
Рмех = m2 I 22 r2 (1 s)/ s.
Если последнее выражение представить в виде sРмех / (1 s) = m2 I 22 r2 ,
то становится очевидным тот факт, что с увеличением скольжения увеличивается нагрев ротора.
183
Поэтому современные асинхронные двигатели рассчитываются так, чтобы в рабочем режиме скольжение было минимальным.
Полезная механическая мощность на валу двигателя Р2 меньше механической мощности Рмех, развиваемой двигателем, нa величину механических потерь, определяемых трением в подшипниках, а также трением ротора о воздух.
13.6. Вращающий момент и его зависимость от скольжения
Вращающий момент двигателя связан с механической мощностью и угловой частотой вращения ротора известной из механики формулой
М РМЕХ / 2 .
Механическая мощность и ее зависимость от параметров ротора с учетом полученных выше соотношений может быть представлена в виде следующего соотношения:
Рмех = m2Е2I2соsφ2(1 s).
Связь между угловой частотой вращения ротора и магнитным полем статора может быть выражена через скольжение 2 1 (1 s). Если обмотка ста-
тора имеет одну пару полюсов, то 1 , т. е. угловая частота вращения магнитного поля статора равна круговой частоте тока. Однако в общем случае двигатель имеет несколько пар полюсов. Тогда 1 /р , а выражение для угловой частоты ротора примет вид 2 = ( 1 s ) / р .
Учитывая это обстоятельство, выражение для вращающего момента запишем в виде М = (рm2/ )Е2I2соsφ2. Обозначив отношение, стоящее в скобках, как некоторую постоянную СМ, запишем выражение для вращающего момента в виде
М = СМ Е2I2соsφ2.
Анализ полученного выражения показывает, что вращающий момент двигателя пропорционален произведению тока и ЭДС ротора и углу сдвига фаз между ними. Покажем влияние скольжения на отдельные сомножители, опре-
|
деляющие |
вращающий момент двигателя. |
||||||||||||
|
Здесь |
СМ = рm2 / |
постоянная |
для данного |
типа двигателя |
|||||||||
|
величина, |
зависящая |
только |
от |
его |
конструктивных |
особенностей |
|||||||
|
E2 = 4,44w2f1Фmкoб — ЭДС, наводимая в обмотке неподвижного |
ротора; |
||||||||||||
|
I |
2 |
E |
2S |
/ z |
2 |
E |
2 |
s / |
r 2 (sx |
2 |
)2 |
ток в |
фазе обмотки вращающегося ро- |
|
2 |
|||||||||||||
|
тора, |
при |
увеличении |
скольжения увеличивается или уменьшается |
||||||||||
|
при его уменьшении; |
184
|
соsφ2 = r2/ |
r 2 (sx |
2 |
)2 фазовый угол между ЭДС и током в обмотке ротора, |
||||||
|
2 |
|||||||||
|
уменьшается при увеличении скольжения и увеличивается при его уменьшении. |
|||||||||
|
Таким образом, из трех основных параметров ротора только два зависят |
|||||||||
|
от скольжения, причем один изменяется прямо пропорционально, а второй |
|||||||||
|
обратно пропорционально скольжению. |
|||||||||
|
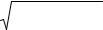
Графическая зависимость вращающего момента от скольжения су- |
|||||||||
|
щественна нелинейная (рис. 13.9,а). Характерными точками этой зависимости |
|||||||||
|
являются: МП пусковой момент, соответствующий s = 1, т. е. неподвижному |
|||||||||
|
ротору; MН номинальный момент, соответствующий номинальному скольже- |
|||||||||
|
нию sН, т. е. рабочему режиму; МКР критический момент, т. е. наибольшее |
|||||||||
|
значение |
вращающего |
момента, которому соответствует критическое значе- |
|||||||
|
ние скольжения sКР. |
|||||||||
|
Значение критического момента определяет границу между устойчивой и |
|||||||||
|
неустойчивой областями работы двигателя. Двигатель работает в устойчивой |
|||||||||
|
области, если при увеличении момента сопротивления на валу вращающий мо- |
|||||||||
|
мент возрастает. Скольжение в этой области изменяется от нуля до критическо- |
|||||||||
|
го значения. Если же при увеличении момента сопротивления скольжение уве- |
|||||||||
|
личивается, а вращающий момент уменьшается, то двигатель работает в неус- |
|||||||||
|
тойчивой области, что в конечном итоге ведет к его остановке. Скольжение в |
|||||||||
|
этой области больше критического, но меньше либо равно единице. Физически |
|||||||||
|
уменьшение величины вращающего момента в этой зоне объясняется уменьше- |
|||||||||
|
нием активной составляющей тока ротора, что приводит к уменьшению cosφ2. |
|||||||||
|
Зависимость вращающего момента от частоты вращения ротора называ- |
|||||||||
|
ется механической характеристикой. Вид характеристики показан на рис. 13.9,б. |
|||||||||
|
На механической характеристике можно выделить те же характерные точки, что |
|||||||||
|
и на зависимости М = ξ(s). |
|||||||||
|
а) |
М |
б) |
n |
||||||
|
MКР |
nH |
||||||||
|
nКР |
|||||||||
|
МП |
|||||||||
|
МН |
|||||||||
|
S |
М |
||||||||
|
0 |
SH SКР 0,4 |
0,6 |
0,8 |
1 |
0 |
МН МП |
МКР |
||
|
Рис. 13.9 |
|||||||||
|
185 |

13.7. Коэффициенты мощности и полезного действия асинхронного двигателя
Преобразование электрической энергии в механическую сопряжено не только с потреблением активной и реактивной мощностей, но и с потерями энергии. По этой причине коэффициенты мощности ( cosφ1) и полезного действия (η) асинхронного двигателя не остаются постоянными. Рассмотрим этот вопрос более подробно.
Изменение коэффициента мощности в процессе работы асинхронного двигателя обусловлено изменением составляющих тока статора. Реактивная составляющая тока статора не зависит от нагрузки на валу двигателя и при любом напряжении сети практически неизменна. В то же время, активная составляющая тока двигателя пропорциональна его механической нагрузке. Это приводит к тому, что с увеличением нагрузки относительное значение реактивного тока убывает, а коэффициент мощности увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок порядка 0,2…0,3. С увеличением нагрузки он быстро возрастает и достигает максимального значения 0,7…0,9 при номинальной нагрузке.
При увеличении нагрузки двигателя свыше номинального значения увеличивается реактивная составляющая тока и коэффициент мощности начинает уменьшаться. Причиной увеличения реактивной составляющей тока является влияние магнитных потоков рассеяния, что и приводит к увеличению реактивной мощности двигателя.
Значение коэффициента мощности трехфазного асинхронного двигателя можно вычислить по формулам
|
cos |
1 |
P / |
3U |
1 |
I |
1 |
P / |
P 2 |
Q 2 . |
|
1 |
1 |
1 |
1 |
Коэффициент полезного действия ( КПД ) определяется отношением полезной мощности Р2 к подводимой Р1. Следует помнить, что полезной является механическая мощность, развиваемая двигателем на его валу, тогда как подводимая мощность является электрическим параметром и определяется произведением напряжения, тока и коэффициента мощности.
Из приведенной выше энергетической диаграммы следует, что мощность Р1 равна сумме полезной мощности и всех видов потерь в двигателе
Р1 = Р2 + РП .
Потери мощности можно разделить на постоянные, практически не зависящие от нагрузки, и от нее зависящие — переменные. К группе постоянных потерь относятся потери в стале сердечника от гистерезиса и вихревых токов, а
186
также механические потери. Эти потери определяются экспериментально из опыта холостого хода. Переменными потерями являются потери, обусловленные сопротивлением проводников протекающему по ним току:
Р1 = 3 I12 r1; Р2 = m2 I 22 r2, Вт.
КПД двигателя (о.е.) можно вычислить по формуле
η = (Р2 + РП ) / Р1.
Максимальное значение КПД достигается при равенстве постоянных и переменных потерь. Обычно максимум КПД имеет место при нагрузке, равной 75 % от номинальной. Это объясняется тем, что двигатели проектируются с учетом того обстоятельства, что в процессе эксплуатации они не всегда полностью загружены.
13.8. Расчет механической характеристики двигателя по паспортным данным
Основными точками механической характеристики асинхронного двигателя являются: номинальный, пусковой и максимальный моменты, а также соответствующие им частоты вращения. Покажем, как, пользуясь информацией, приведенной в паспорте двигателя, можно рассчитать характерные точки механической характеристики. В табличке, закрепленной на корпусе статора, приведены значения номинальной механической мощности и частоты вращения ротора. По этим данным можно вычислить значения номинального момента на валу двигателя (Н.м):
|
М Н Р2 Н / Н , |
|
|
и номинального скольжения |
sH (n n) / n1, |
где ΩН = πn / зо круговая частота вращения ротора.
Для расчета значений пускового и максимального моментов следует взять справочник по электрическим машинам и найти в нем для данного двигателя два параметра: кратность пускового момента КП и кратность максимального момента КМ. Значения коэффициентов определяются соотношением соответствующих моментов к его номинальному значению:
КП = МП / МН , КМ = МКР / МН .
Из приведенных соотношений, находим значения пускового и макси-
мального моментов: МП = КП МН , ММ = КМ МН .
Скольжение, соответствующее пусковому моменту, равно единице. Следовательно, n = 0 об/мин, т. е. ротор неподвижен. Скольжение, соответствующее максимальному ( критическому ) моменту, вычисляется по формуле
187
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Введение
Упомянутый в заголовке способ управления асинхронным двигателем (АД) основан на поддержании оптимальной частоты токов ротора (оптимального абсолютного скольжения νОРТ), соответствующей максимальному электромагнитному моменту ротора, и управлении величиной момента путем регулирования токов статора [1].
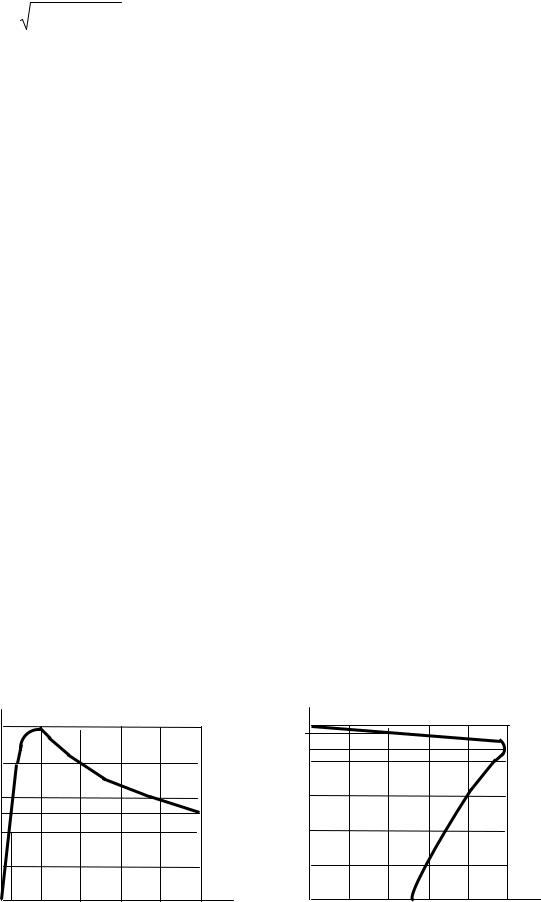
На рис. 1 представлена функциональная схема замкнутой нереверсивной системы регулирования частоты вращения АД, управляемого токами статора. Схема отличается от традиционных схем привязкой частоты токов статора ω к частоте вращения ротора АД Ω. Схема относится к случаю одной пары полюсов АД и возможности рекуперативного торможения. В зависимости от знака отклонения частоты вращения АД Ω от заданного ее значения ΩЗ (ΔΩ = ΩЗ – Ω) частота токов статора увеличивается или уменьшается на частоту токов ротора, соответствующую экстремальному значению электромагнитного момента АД Mr. Таким образом:

где r — активное сопротивление фазы ротора, LrЭ — ее эквивалентная индуктивность, учитывающая взаимную индуктивность фаз ротора.

Рис. 1. Функциональная схема системы регулирования частоты вращения АД, управляемого токами статора
Амплитуда токов статора регулируется по замкнутому контуру пропорциональным регулятором с достаточно большим коэффициентом усиления K (рис. 1). Благодаря привязке частоты токов статора к скорости АД регулятор амплитуды токов устанавливает наименьшую возможную амплитуду токов при данном моменте нагрузки MН.
Система регулирования частоты вращения АД позволяет в переходных режимах в зоне насыщения использовать максимальный электромагнитный момент двигателя, соответствующий уровню ограничения амплитуды токов якоря Im max и частоте токов в роторе, согласованной с экстремумом электромагнитного момента АД.
Основная проблема, возникающая при реализации частотно-токового способа управления АД, заключена в нестабильности параметров его ротора — r и LrЭ, вследствие изменения его температуры и степени насыщения магнитопровода. Измерение r и LrЭ, необходимых для вычисления vОРТ, во многих случаях оказывается технически слишком сложной задачей. Очевидный путь решения проблемы — отказ от измерения r и LrЭ в пользу непосредственного измерения vОРТ.
Работа АД с постоянным скольжением, соответствующим максимальному вращающему моменту, идеальна для переходных режимов, поскольку обеспечивает наибольшее быстродействие. Для установившихся режимов решающее значение имеют энергетические показатели, особенно при использовании аккумуляторных батарей в качестве источника энергии. Если режим максимального вращающего момента существенно уступает по энергетическим показателям, то имеет смысл поддерживать разные значения оптимального скольжения в переходных и в установившихся режимах. Ниже определено оптимальное значение скольжения vОРТ1, соответствующее минимуму энергии, потребляемой АД в установившемся режиме, и способ его экспериментального определения и поддержания в процессе работы.
Определение оптимального скольжения
Логично ожидать, что в стационарном режиме при постоянных частоте вращения Ω и моменте нагрузки MН = Mr в рассматриваемой функциональной схеме рис. 1 обеспечивается минимум потребляемой АД мощности при vОРТ. Доказав это, можно предложить способ определения vОРТ по минимуму потребляемой мощности при постоянных значениях частоты вращения Ω и момента нагрузки MH = Mr и изменяющемся скольжении v.
Исходными данными для анализа выберем выражение установившегося вращающего момента АД, полученное в [1]:

где Ims — амплитуда установившегося тока фазы статора АД; CM — конструктивная постоянная АД, и уравнение электрического равновесия для фазной обмотки статора АД в стационарном режиме (uФ = Um cos(ωt), iФ = Ims cos(ωt — js)), полученное в статье [2]:

где

Mm — максимальная взаимоиндуктивность фаз статора и ротора АД; ω = Ω + v.
В стационарном режиме АД потребляет от источника питания (трехфазного генератора тока) мощность, определяемую выражением:

Определив из уравнений (2) и (3)

и подставляя в формулу (4), получаем:

Исследование полученного выражения на экстремум дает две стационарные точки:
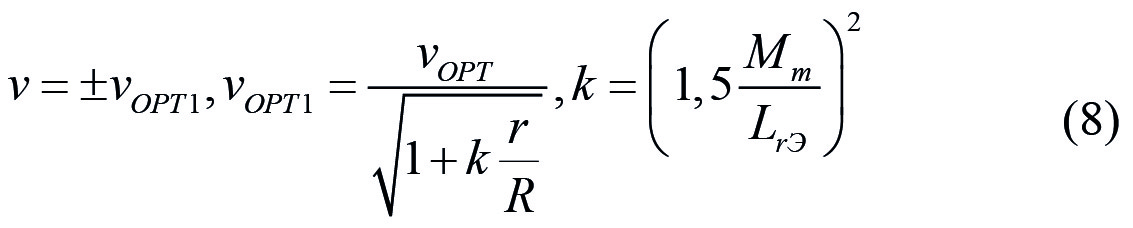
Как следует из выражения (8), |vОРТ1|< vOPT = r/LrЭ. Можно предположить, что при нагреве АД под нагрузкой величина отношения r/R изменяется незначительно, как и величина отношения Mm/LrЭ при изменении степени насыщения магнитопровода. Это позволяет полагать vОРТ пропорциональными и определить коэффициент пропорциональности экспериментально.
В двигательном режиме при постоянных значениях частоты вращения Ω и момента нагрузки MН получены относительные значения мощности, потребляемой АД в двух случаях:

Таким образом, относительное превышение минимальной мощности при скольжении, оптимальном по вращающему моменту, составляет:

Из выражения (10) очевидно, что относительный выигрыш в потребляемой мощности резко снижается при увеличении частоты вращения АД Ω. При параметрах АД, использованных в статье [2]: R = r = 0,2 Ом, Mm = 0,09 Гн, LrЭ = 0,145 Гн, k = (1,5 Mm/LrЭ)2 = 0,86683, — рассчитан относительный выигрыш для двух значений Ω:

Полученный результат показывает, что при ν= νОРТ потребляемая АД мощность незначительно превышает минимальную, и даже в крайнем случае, при превышении минимальной мощности, не превосходит 5%.
Отношение вращающих моментов АД (2) при νОРТ и νОРТ1 составляет:

Как видно из полученного результата, уменьшение νОРТ в √1+kr/R = √1,86683 = 1,3663 раз приводит к уменьшению Mr практически в 2 раза. Поэтому при работе в стационарном режиме с ν = vОРТ1 необходимо перед началом переходного режима перейти от ν = νОРТ1 к ν = νОРТ.
Поддержание оптимального скольжения
Для многих электроприводов, например в системах электродвижения на транспорте, основным режимом работы является установившийся режим с постоянной скоростью и постоянным моментом нагрузки. Поддержание скольжения, оптимального по потреблению энергии, из-за естественного изменения параметров АД требует его непрерывной коррекции.
Эту задачу можно решить с помощью поисковой системы экстремального управления (СЭУ) с запоминанием экстремума показателя качества [3], которым в этом случае является потребляемая АД мощность Р, а регулируемым параметром — абсолютное скольжение ν. Функциональная схема СЭУ представлена на рис. 2.

Рис. 2. Функциональная схема СЭУ
В основе действия этой системы лежит следующий принцип поддержания экстремума (минимума) потребляемой мощности. Исполнительный элемент ИЭ принудительно с малой скоростью изменяет скольжение ν — параметр объекта управления (ОУ). Показатель качества — потребляемая АД мощность при этом проходит экстремальное (минимальное) значение, которое фиксируется запоминающим элементом (ЗЭ). Сравнивающий элемент (СЭ) сравнивает текущее значение мощности с запомненным ее минимальным значением. При достижении разностью РЗУ – Р порогового значения d (d< 0) логическое устройство (ЛУ) производит реверс ИЭ. Параметр v начинает изменяться в противоположном направлении, и вновь Р возвращается к минимуму и заново запоминается в ЗЭ. При достижении РЗУ – Р порогового значения d происходит вторичный реверс ИЭ, и цикл работы повторяется. Вследствие этого устанавливается режим автоколебаний относительно экстремальной точки (минимума мощности, потребляемой АД). Часто зависимость показателя качества от настраиваемого на экстремум параметра обладает четной симметрией относительно точки экстремума. При достаточно низкой скорости поиска по сравнению со скоростью процессов в ОУ в СЭУ устанавливаются автоколебания, близкие к симметричным. Размах колебания показателя качества равен модулю порога срабатывания ЛУ. При минимизации полной мощности, потребляемой приводом, представленным на рис. 1, в случае Е = const, достаточно минимизировать постоянную составляющую тока, потребляемого инвертором.
Логическое устройство осуществляет изменение направления поиска при каждом достижении РЗУ – Р порогового значения d. Его логическая функция подобна функции статического триггера в режиме счетного входа. Логическую функцию ЗЭ в аналоговой форме легко реализовать с помощью пикового детектора со сбросом напряжения на конденсаторе до значения входного напряжения ЗЭ в момент срабатывания ЛУ.
Разумеется, современные микропроцессоры позволяют программную реализацию СЭУ. При этом проще не запоминать экстремум показателя качества, а оценивать знак его приращения на каждом шаге поиска. Например, при поиске минимума потребляемой мощности направление поиска следует изменять на противоположное, если ее приращение на очередном шаге становится положительным.
На рис. 3 над пунктирной разделительной линией представлена цифровая модель системы регулирования частоты вращения АД, управляемого токами статора (рис. 1), построенная в системе Mathlab Simulink. При этом трехфазный регулятор токов статора полагается идеальным управляемым генератором тока [1]. Под разделительной линией расположена цифровая модель шаговой поисковой системы экстремального управления, определяющей и поддерживающей абсолютное скольжение v (частоту токов ротора), соответствующее минимуму мощности Р, потребляемой АД при постоянных скорости Ω и моменте нагрузки МН. Принцип действия ее основан на оценке знака приращения мощности на выбранном временнóм интервале T при изменении v с малой скоростью dν/dt, осуществляемом исполнительным элементом СЭУ. В модели СЭУ ИЭ представлен интегратором integrator 1. В соответствии с полученным выше выражением (9) текущее значение мощности определяется выражением:

где


Рис. 3. Цифровая модель системы регулирования частоты вращения АД, управляемого токами статора, с системой экстремального управления, поддерживающей минимум мощности, потребляемой двигателем
Для вычисления 1/v в модели СЭУ использована решающая схема с отрицательной обратной связью, состоящая из интегратора integrator 2, блока умножения product 1 и усилителя с коэффициентом усиления 104. Дискретные значения Р с интервалом Т определяет фиксатор нулевого порядка Zero-Oder Hold 1. Разность текущего и предыдущего значения Р ΔР и увеличение ее в 10 раз осуществляет дискретная передаточная функция Discrete Transfer Fcn 2. Реверс ИЭ при ΔР > 0 выполняет логическая схема, состоящая из реле Relay 1, фиксатора нулевого порядка Zero-Oder Hold 2, блока умножения product 2 и инерционного элемента Transfer Fcn 2, необходимого для работы замкнутого контура, образованного безынерционными элементами. Фиксатор нулевого порядка запоминает выходной сигнал реле (+1 или –1) с противоположным знаком. При ΔР > 0 короткий положительный импульс, поступающий на вход 2 блока умножения product 2, изменяет состояние реле на противоположное. Блок умножения product 3 совместно с генераторами единичного скачка step1 и step2 позволяют включать и отключать управление импульсным элементом ИЭ в заданное время. Короткий импульс в момент времени, когда ΔР принимает положительное значение, получается в модели СЭУ с помощью 2 блоков насыщения saturation 1 и 2 с ограничением отрицательного сигнала на нулевом уровне, усилителя с коэффициентом усиления 400 и дифференцирующей цепочки, представленной звеном Transfer Fcn. Подключение СЭУ осуществляется установкой переключателя Manual Switch в положение 2.
Процессы в системе при поддержании минимума потребляемой мощности
Система регулирования частоты вращения АД, дополненная СЭУ, поддерживающей минимум мощности, потребляемой двигателем в стационарном режиме, в общем случае весьма сложна для анализа аналитическими методами. Однако анализ СЭУ довольно просто выполнить, полагая практически безынерционным ее объект управления, то есть систему регулирования частоты вращения АД. Это означает, что при изменении параметра v потребляемая АД мощность изменяется согласно статической характеристике P(ν), снятой в установившемся режиме. Допущение выполняется, очевидно, тем более точно, чем быстрее протекают переходные процессы в системе регулирования частоты вращения АД и чем медленнее изменяется v. Во многих реальных случаях такое условие можно выполнить с необходимой точностью.
На рис. 4 представлена цифровая модель СЭУ со статическим ОУ, полученным заменой цифровой модели системы регулирования частоты вращения блоком постоянной величины, равной Ω.

Рис. 4. Цифровая модель СЭУ со статическим ОУ
На модели (рис. 4) проведено имитирование переходного процесса при небольшом начальном отклонении от оптимального значения v. При подходе к оптимальному значению v в СЭУ устанавливаются автоколебания с периодом, равным 4T, где T = 20 с — интервал дискретности, (|dν/dt| = 0,00125 рад/с/с), представленные на рис. 5. В частном случае, если момент первого достижения минимального значения Р совпадает с моментом дискретизации, период автоколебаний Р оказывается вдвое меньше, как показано на рис. 6.

Рис. 5. Процессы в идеализированной СЭУ в общем случае

Рис. 6. Процессы в идеализированной СЭУ в частном случае
Очевидно, что максимальное отклонение P от минимального значения в установившемся режиме может иметь значение от (Tdν/dt)2 до 4K(Tdν/dt)2, если вблизи экстремума P – Pmin = K(ν – νOPT1)2 с хорошей точностью.
В реальных условиях даже медленное изменение v и периодическая смена направления сопровождается отклонением процесса в системе регулирования частоты вращения АД от стационарного, соответствующего постоянному значению v. Следовательно, процесс в действительности отличается от идеализированного процесса, представленного на рис. 5 и 6. Моделирование по модели, представленной на рис. 3, позволяет учесть взаимное влияние СЭУ и системы регулирования частоты вращения АД.
Основное отличие проявляется в моменты реверса v и периодическом изменении Pmin (кривая 5(Р–С) на рис. 7 и 8). Вызвано это малым периодическим отклонением частоты вращения АД Ω от постоянного значения. Уменьшение скорости изменения v позволяет практически исключить влияние изменения v на Ω.

Рис. 7. Влияние реальных свойств ОУ на процессы в СЭУ в общем случае

Рис. 8. Влияние реальных свойств ОУ на процессы в СЭУ в частном случае
Выводы
- Определено абсолютное скольжение, оптимальное по мощности, потребляемой асинхронным двигателем в системе частотно-токового управления частотой его вращения в стационарном режиме при постоянном моменте нагрузки. Оно зависит только от параметров двигателя.
- При экспериментальном подтверждении пропорциональности скольжения, оптимального по потребляемой мощности, и скольжения, оптимального по вращающему моменту, можно в переходном режиме, легко заменив первое (ν = νОРТ1) на второе
(ν = νОРТ), получить наибольшее быстродействие системы регулирования скорости АД. - Поисковая система экстремального управления позволяет не только определять в системе частотно-токового управления частотой вращения асинхронного двигателя абсолютное скольжение, оптимальное по потребляемой им мощности, но и поддерживать минимальную потребляемую мощность при изменении параметров двигателя.
Литература
- Коршунов А. И. Алгоритм частотно-токового управления асинхронным двигателем в замкнутом электроприводе // Силовая электроника. 2019. № 3.
- Коршунов А.И. Математическая модель асинхронного трехфазного двигателя с фазным ротором, не использующая понятие вращающегося магнитного поля // Силовая электроника. 2019. № 6.
- Техническая кибернетика. Теория автоматического регулирования. Книга 3. Теория нестационарных, нелинейных и самонастраивающихся систем. Часть II. Под. ред. Солодовникова В. В. М.: Машиностроение, 1969.
Что нужно знать о скольжении асинхронного двигателя
Содержание
- 1 Устройство и принцип работы
- 2 Что такое скольжение АД
- 3 Зависимость режимов работы мотора от скольжения
- 4 Способы измерения
- 5 Видео по теме
Одним из основных электромоторов в мире является асинхронный двигатель. Чтобы его использовать в качестве привода, надо понимать, как поведет себя одна из главных переменных характеристик при пуске, изменении нагрузки на валу, колебании электронапряжения и частоты. Этот параметр называется скольжением электродвигателя.

Устройство и принцип работы
Двигатель переменного электротока, в котором скорость вращения ротора меньше скорости вращающегося электромагнитного поля статора, называется асинхронным.
Обмотки статора подключаются к сети синусоидального трехфазного электротока, после чего электромагнитный поток начинает вращаться и пересекает замкнутые токопроводящие витки подвижной части мотора. Под действием наведенной в них ЭДС возникает переменный электроток. Он создает свое магнитное поле, которое заставляет вращаться ротор с асинхронной скоростью следом за полем статора.

Статор представляет собой набранный из изолированных листов электротехнической стали корпус, в который различным способом уложены обмотки возбуждения. Ротор тоже шихтуется из изолированных листов. Они имеют пазы, в которых закрепляются штыри короткозамкнутого ротора или укладывается фазная обмотка. На концах вала ротора расположены подшипники, вставленные в торцевые крышки статора.

Короткозамкнутый ротор (его также называют «беличьей клеткой») состоит из набора стержней из алюминия или меди. По торцам они закольцованы вместе. Это наиболее простая и распространенная конструкция АД.

Мотор, ротор которого содержит 3-х фазную обмотку, называется фазным. Полноценные изолированные витки трех обмоток концами соединены вместе, а их начала выведены на контактные кольца. При помощи щеточного скользящего контакта катушки выведены на внешнее управление.

Что такое скольжение АД
Создание вращающегося магнитного поля (МП) в неподвижной части электрической машины происходит за счет разнесенных на 120 градусов по окружности корпуса витков 3-х катушек. Они образуют одну пару полюсов (p), на практике их может быть больше. Обмотки соединяются «треугольником» или «звездой». Запитываются они от трехфазной сети переменного электротока.
Электроток, сдвинутый по фазе на 120 градусов, протекая по размещенным по окружности виткам 3-х катушек, создает вращающееся МП с синхронной частотой:

Вращающееся МП, пересекая набор замкнутых токопроводящих витков подвижной части машины, создает в них ЭДС. Образовавшаяся в замкнутых рамках ротора электродвижущая сила способствует возникновению переменного электротока, воспроизводящего свое вращающееся электромагнитное поле.
Подвижная часть машины начинает вращаться вслед за вращающимся полем со скоростью n2 (об/мин), стремясь засинхронизировать свое электромагнитное поле с вращающимся полем неподвижной части, то есть, достичь скорости n1 (об/мин). Величина разницы скоростей в относительных единицах или процентах называется коэффициентом скольжения (S):

Асинхронная скорость n2 при нормальной эксплуатации электродвигателя всегда меньше синхронной скорости n1, поэтому скольжение асинхронного двигателя меньше единицы и ста процентов.

Зависимость режимов работы мотора от скольжения
Для АД скольжение рассматривается:
- В режиме холостого хода (ХХ);
- при номинальном значении нагрузки;
- генераторном применении;
- критической нагрузке;
- во время пуска.

Асинхронная скорость n2 в режиме ХХ при отсутствии нагрузки на валу практически равна синхронной скорости вращения электромагнитного поля статора n1. Скольжение в этом случае будет не более 3% и даже в режиме идеального ХХ (если пренебречь трением в подшипниках), оно не будет нулевым.
При номинальном напряжении и нагрузке скольжение S находится в диапазоне 2–8% для большинства моторов. Номинальная скорость или скольжение указываются на шильдике асинхронного двигателя. По ним строится график механической характеристики.
В генераторном режиме скольжение может быть отрицательным, то есть, меньше 0. Ротор в этом случае вращается под действием механической силы навстречу вращающемуся электромагнитному полю статора.
С увеличением нагрузки на валу мотора увеличивается момент торможения, вследствие чего увеличивается и скольжение. При этом растет электроток, наводимый в роторе, наряду с моментом вращения. При небольших нагрузках между моментом и скольжением наблюдается прямо пропорциональная зависимость. Но рост скольжения способствует возрастанию активных потерь в роторе, снижающих наводимый электроток. По этой причине момент увеличивается с меньшей скоростью, чем скольжение, а при определенном значении последнего момент становится максимальным и начинает снижаться. Скольжение, соответствующее максимальному моменту, называется критическим.
При пуске мотора асинхронная скорость равняется нулю, скольжение — единице, электроток в двигателе максимальный, а значение момента вращения вала выше значения момента торможения нагрузки. С увеличением скорости вращения МП ротора скольжение уменьшается, а когда скорость достигает своего номинального значения, устанавливается нормальный режим.

Из графика видно, что скольжение мотора меняется от 0 до 1. До того момента, пока не возникнет критическое скольжение, мотор работает устойчиво, а в промежутке от Sкр до 1 возникает неустойчивый режим, который зависит от характера и величины нагрузки на валу. Для управления в этом диапазоне применяют либо переключение «звезда-треугольник», либо фазный ротор, либо частотное регулирование.
Способы измерения
Измерение скольжения в двигателе должно осуществляться согласно требованиям ГОСТ 7217–89 с помощью амперметра постоянного тока, катушки индуктивности или стробоскопического эффекта.
Основная задача — подсчитать количество полных N отклонений стрелки от 0 за период времени T. После того, как нашли данный параметр, можно определить частоту электротока ротора:

Затем по соотношению частоты электротока статора и ротора следует найти скольжение:

Косвенными методами при использовании электромагнитной катушки или стробоскопического эффекта определяют количество оборотов ротора К за период времени Т (сек). Затем вычисляется скольжение. Для этого используется формула:

При больших значениях скольжения для измерения применяются тахогенераторы или тахометры, установленные на валу двигателя.
Видео по теме
Как найти скольжение?
Скольжение асинхронного двигателя — относительная разность скоростей вращения ротора и изменения переменного магнитного потока, создаваемого обмотками статора двигателя переменного тока. Скольжение может измеряться в относительных единицах и в процентах.
Как определить критическое скольжение?
Критическое скольжение определяется отношением сопротивления ротора к эквивалентному сопротивлению (обусловлено активным сопротивлением статора и индуктивным сопротивлением рассеяния статора и ротора).
В каком случае скольжение равно 1?
Величина скольжения s =1, когда ротор электродвигателя не вращается при включенной обмотке статора. Этот режим называют режимом короткого замыкания электродвигателя (или режимом стоянки под током).
Как определить скольжение S асинхронного двигателя если известны n1 частота вращения магнитного поля n2 частота вращения ротора?
Если частота вращения электродвигателя значительно отличается от синхронной, ее измеряют тахометром или тахогенератором, который присоединяется непосредственно на валу электродвигателя, а скольжение двигателя определяют по формуле S = (n1 — n2) / n1, где n1 = 60f /p – синхронная частота вращения; n2 – фактическая …
Как определить количество пар полюсов электродвигателя?
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов. Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
Как найти частоту вращения двигателя формула?
Исходя из формулы n = (1 — S)60f/p где n — скорость вращения ротора, S — скольжение, f- частота питающей сети, p — количество пар полюсов. Существует три способа регулирования скорости вращения асинхронного двигателя: — изменение скольжения. Этот способ используется в двигателях с фазным ротором.
Почему называется асинхронным двигателем?
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Что такое скольжение?
Скольжение — в асинхронной электрической машине, безразмерная величина, равная разности частоты вращения магнитного поля n1 и частоты вращения ротора машины п2, отнесённой к n1: S = (n1 п2)/n1. С.
Что значит скольжение?
скольжение — сдвиг, плавное движение; сползание, глиссирование, портаменто, глиссада, съезжание, микроскольжение, юз, серфинг Словарь русских синонимов.
Как определить выводы электродвигателя?
Определение начала и конца обмоток трехфазного электродвигателя
- Первый щуп тестера подсоединяют к одному из выводов
- Вторым поочередно касаются остальных проводов.
- Если на какой-то паре покажется целостность цепи – это и будет одна из фазных обмоток
- Аналогично выделяются все обмотки
- Каждую из обмоток помечают
17 февр. 2020 г.
Какой из способов регулирования частоты вращения асинхронного двигателя самый экономичный?
Регулирование частоты вращения асинхронного двигателя изменением частоты питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода.
Как изменить направление вращения трехфазного двигателя?
Для смены направления движения нужно:
- обесточить электродвигатель;
- снять крышку клеммной коробки;
- переставить жилы силового кабеля в соответствие со схемой изображенной на рис. 3: жилу с изоляцией черного цвета (L3) переподключить на контакт V1 в клеммной коробке, а жилу коричневого цвета (L2) на контакт W1.
Какие существуют способы пуска асинхронных двигателей?
Пуск асинхронных двигателей можно производить при полном напряжении (прямой пуск) и при пониженном напряжении. Прямой пуск осуществляется при помощи рубильников, переключателей, пакетных выключателей, магнитных пускателей, контакторов и контроллеров. При прямом пуске к двигателю подается полное напряжение сети.
Кто впервые сконструировал трёхфазный асинхронный электродвигатель год?
В 1889 М. О. Доливо-Добровольский испытал сконструированный им первый в мире трёхфазный А. э., в котором применил ротор типа «беличье колесо» (германский патент № 51083), а обмотку статора разместил в пазах по всей окружности статора.
Как устроены асинхронные двигатели с фазным ротором?
Конструктивно фазный ротор представляет из себя трехфазную обмотку (аналогичную обмотки статора) уложенную в пазы сердечника фазного ротора. Концы фаз такой обмотки ротора обычно соединяются в «звезду», а начала подключают к контактным кольцам, изолированным друг от друга и от вала.
Сколько полюсов в трехфазном двигателе?
Трехскоростные двигатели имеют следующие соотношения количества полюсов и частот вращения вала: — шесть, четыре и два полюса (6/4/2) соответствуют тысячи, полутора и трем тысячам оборотов в минуту (1000/1500/3000);
Как узнать сколько полюсов у двигателя?
Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса.
Оптимальное скольжение
Cтраница 1
Оптимальное скольжение, обеспечивающее минимум функции потерь ДРЭП ( Л /, со, р), определяется численными методами. Рассмотренный выше алгоритм поиска минимума функции качества АРЛВ ( М, со, 3), базирующийся на методе касательных, сравнительно просто обобщается на случай минимизации функции потерь системы ПЧ-АД.
[2]
Линия оптимального скольжения проходит через точки максимума моментов, каждый из которых отвечает своему постоянному значению тока статора. Таким образом, сравнительно просто находится ропт.
[3]
Линия оптимального скольжения проходит через точки максимумов моментов, каждый из которых отвечает своему постоянному току статора.
[4]
Таким образом, оптимальное скольжение асинхронного двигателя прямо пропорционально активному сопротивлению обмотки ротора.
[6]
Чему равен вращающий момент асинхронного двигателя при оптимальном скольжении.
[7]
Чему равен вращающий момент асин хронного двигателя при оптимальном скольжении.
[8]
Подшипники и ролики, которые производит компания, обеспечивают оптимальное скольжение и устраняют шум в эскалаторах и конвейерах.
[9]
Вычисляются координаты магнитного состояния АД if0 ( M, ( 3), / о ( Л /, & g), Хй ( М, Р) и потери A / B ( j1 / f co p) при оптимальном скольжении.
[11]
Отметим, что частотно-регулируемый асинхронный электропривод как объект управления обладает экстремальными характеристиками по сетевым показателям. Это вытекает из анализа формул сетевых характеристик электропривода. Действительно, при наличии экстремума тока / все они примут экстремальные значения. Анализ экстремального по току / закона управления показывает, что оптимальное скольжение зависит как от момента, так и от скорости двигателя и в общем случае не совпадает при прочих равных условиях со значениями ( 3 в точках минимума функций мощности потерь и тока статора. Однако режим минимального тока / достаточно близок как к режиму минимального тока статора, так и к режиму управления по минимуму полных потерь двигателя. Для сравнения на рис. 3.38, б приведены зависимости тока статора от параметра абсолютного скольжения при различных фиксированных значениях момента.
[13]
ЭДС пропорциональна частоте вращения магнитного поля. Следует поменять местами дне фазы. Вспомните, как направлены магнитные силовые линии магнита. При увеличении нагрузки частота вращения ротора уменьшится, а скольжение увеличится. На эти углы поле повернется за половину периода. Правильно, при увеличении сопротивления цепи ротора пропорционально увеличивается оптимальное скольжение. Шесть катушек позволяют получить четырехполюс-ное поле. При пуске двигателя обмотку статора следует соединить звездой. Активное сопротивление обмотки ротора не зависит от скольжения. Учтите, что от частоты тока зависит частота вращения магнитного поля. График этой зависимости имеет максимум, а не минимум. Учтите, что ротор вращается строго с частотой пращения магнитного поля. Ток в обмотке ротора зависит от скольжения, которое уменьшается. Правильно, при увеличении нагрузки ЭДС и ток ротора увеличиваются.
[14]
Страницы:
1