Модуль вектора
Формула
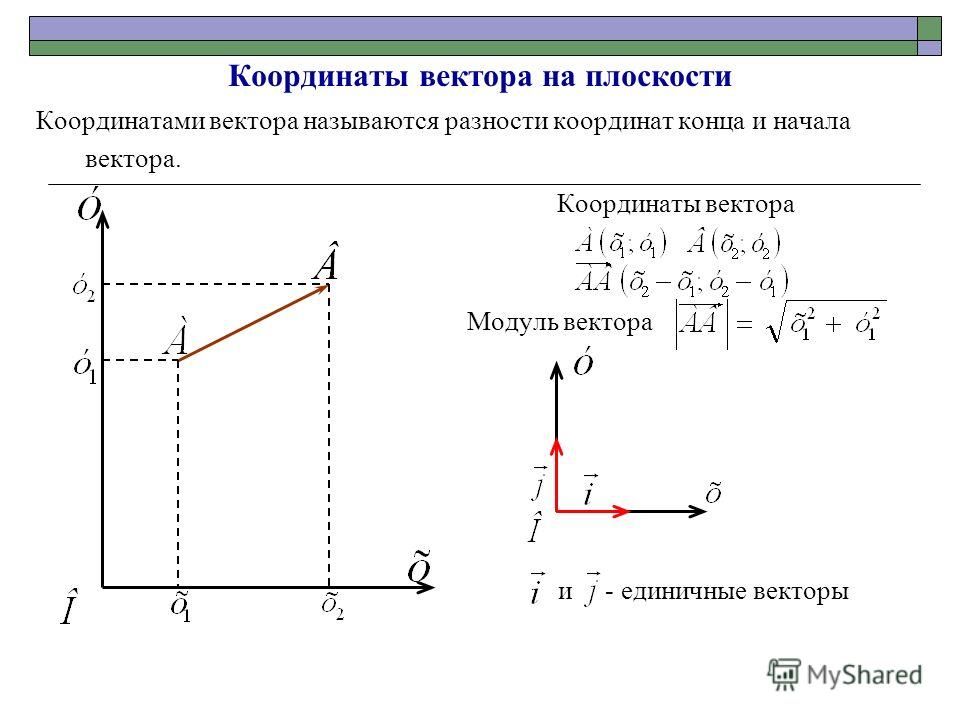
Чтобы найти модуль вектора по координатам нужно извлечь квадратный корень из суммы квадратов его координат, то есть найти длину вектора.
Если вектор задан на плоскости в виде $ overline{a} = (x;y) $, то вычисляется модуль по формуле: $$ |overline{a}|=sqrt{x^2+y^2} $$
В случае, когда вектор задан в пространстве тремя координатами $ overline{a}= (x;y;z) $, то модуль находится по формуле: $$ |overline{a}|=sqrt{x^2+y^2+z^2} $$
Для нахождения модуля вектора нам понадобится знать:
- Координаты вектора
- Формулы
Примеры решений
| Пример |
| Найти модуль вектора $ overline{a} = (3;4;0) $ |
| Решение |
|
Зная координаты мы первым делом определяем на плоскости или в пространстве задана задача. В нашем случае координат у вектора три, поэтому в пространстве (было бы две координаты, то на плоскости). Используем вторую формулу для пространственной задачи: $$ |overline{a}|=sqrt{x^2+y^2+z^2} $$ Подставляя в формулу в место $ x,y,z $ числа из задания получаем модуль: $$ |overline{a}|=sqrt{3^2+4^2+0^2} = sqrt{9+16+0} = sqrt{25}=5 $$ Если не получается решить свою задачу, то присылайте её к нам. Мы предоставим подробное решение онлайн. Вы сможете ознакомиться с ходом вычисления и почерпнуть информацию. Это поможет своевременно получить зачёт у преподавателя! |
| Ответ |
| $$ |overline{a}|= sqrt{25}=5 $$ |
Содержание:
- Формула
- Примеры вычисления модуля вектора
Формула
Чтобы найти модуль вектора, заданного своими координатами, нужно найти его длину, то есть извлечь корень из суммы
квадратов его координат. Если вектор задан на плоскости и имеет координаты $bar{a}=left(a_{x} ; a_{y}right)$, то его модуль вычисляется по формуле
$$|bar{a}|=sqrt{a_{x}^{2}+a_{y}^{2}}$$
То есть модуль вектора равен корню квадратному из суммы квадратов координат.
Если вектор задан в пространстве координатами
 , то его модуль вычисляется по формуле
, то его модуль вычисляется по формуле
$$bar{a}=left(a_{x} ; a_{y} ; a_{z}right)$$
Примеры вычисления модуля вектора
Пример
Задание. Найти модуль вектора $bar{a}=(-1 ; 1)$
Решение. Для нахождения модуля вектора, заданного на плоскости воспользуемся формулой:
$$|bar{a}|=sqrt{a_{x}^{2}+a_{y}^{2}}$$
Подставляя в неё координаты заданного вектора, будем иметь:
$$|bar{a}|=sqrt{(-1)^{2}+1^{2}}=sqrt{1+1}=sqrt{2}$$
Ответ. $|bar{a}|=sqrt{2}$

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Пример
Задание. В пространстве заданны точки
$A(2 ;-4 ; 1)$ и $B(-2 ; 0 ; 3)$. Найти модуль вектора
$overline{A B}$
Решение. Найдем координаты вектора $overline{A B}$. Для этого из координат конца
(точки $B$ ) вычтем соответствующие координаты начала (точки
$A$ ):
$$overline{A B}=(-2-2 ; 0-(-4) ; 3-1)=(-4 ; 4 ; 2)$$
Далее для нахождения модуля вектора $overline{A B}$ воспользуемся формулой:
$|overline{a}|=sqrt{a_{x}^{2}+a_{y}^{2}+a_{z}^{2}}$
Подставляя координаты вектора $overline{A B}$, получим:
$$|overrightarrow{A B}|=sqrt{(-4)^{2}+4^{2}+2^{2}}=sqrt{16+16+4}=sqrt{36}=6$$
Ответ. $|overrightarrow{A B}|=6$
Читать дальше: как найти координаты вектора.
Длина направленного отрезка определяет числовое значение вектора и называется длиной, или модулем, вектора.

Из теоремы Пифагора следует, что в треугольнике (ABC) длина отрезка (AB), которая является модулем вектора
AB→
, равна
AC2+CB2
, и, следовательно, модуль (длина) вектора
AB→
рассчитывается по формуле
AB→=x2+y2
.
Пример:
вычисли длину вектора
AB→=5;3
.
Расстояние между двумя точками
Как известно, координаты вектора можно определить, если даны координаты начальной и конечной точек вектора
Ax1;y1
и
Bx2;y2
.

Если
x=x2−x1
,
y=y2−y1
и
AB→=x2+y2
, то вместо (x) и (y) можно поставить их выражения.
Новую формулу называют не только формулой длины вектора, но и формулой расстояния между двумя точками с заданными координатамиAB=x2−x12+y2−y12.
Так как выражения в скобках в квадрате, то справедливо, что
.
То есть, не важна последовательность координат в разности.
Обрати внимание!
Если даны координаты начальной и конечной точек вектора
Ax1;y1
и
Bx2;y2
, то
AB→x2−x1;y2−y1
.
Обязательно из координат конечной точки надо вычитать координаты начальной точки!
Но при определении длины вектора в формуле последовательность координат не имеет значения:
AB→=x2−x12+y2−y12=x1−x22+y1−y22
.
Содержание
- — Как найти АВ по модулю?
- — Как доказать что модули векторов равны?
- — Чему равна длина векторов?
- — Как найти модуль по физике?
- — Как найти вектор по модулю?
- — Как вычислить длину вектора по двум точкам?
- — Как указать равные векторы?
- — В каком случае векторы равны?
- — Какие векторы считаются противоположные?
- — Что такое длина вектора?
- — Как найти длину вектора если известны его координаты?
- — Когда векторы коллинеарны?
- — Что такое модуль в физике?
- — Как найти модуль скорости движения тела?
- — Как найти модуль ускорения движения?
Чтобы найти модуль вектора по координатам нужно извлечь квадратный корень из суммы квадратов его координат, то есть найти длину вектора.
Как найти АВ по модулю?
Из теоремы Пифагора следует, что в треугольнике ABC длина отрезка AB, которая является модулем вектора AB → , равна AC 2 + CB 2 , и, следовательно, модуль (длина) вектора AB → рассчитывается по формуле AB → = x 2 + y 2 .
Как доказать что модули векторов равны?
То есть, два вектора равны, если они коллинеарные, сонаправленые и имеют равные длины: a = b, если a↑↑b и |a| = |b|. Условие равенства векторов. Вектора равны, если их координаты равны.
Чему равна длина векторов?
Определение длины вектора
Для обозначения длины вектора используются две вертикальные линии слева и справа |AB|. Основное соотношение. Длина вектора |a| в прямоугольных декартовых координатах равна квадратному корню из суммы квадратов его координат.
Как найти модуль по физике?
Чтобы найти модуль вектора надо извлечь корень квадратный из суммы квадратов его проекций. Нетрудно сообразить, как будет выглядеть формула, если вектор задан в пространстве.
Как найти вектор по модулю?
Модуль вектора (длина вектора) |a| в прямоугольных декартовых координатах равен квадратному корню из суммы квадратов его координат.
Как вычислить длину вектора по двум точкам?
Теория. Координаты вектора по двум точкам Определеие. Чтобы найти координаты вектора AB, зная координаты его начальной точки А и конечной точки В, необходимо из координат конечной точки вычесть соответствующие координаты начальной точки.
Как указать равные векторы?
Вектора a и b называются равными, если они лежат на одной или параллельных прямых, их направления совпадают, а длины равны (рис. 6). То есть, два вектора равны, если они коллинеарные, сонаправленые и имеют равные длины: a = b, если a↑↑b и |a| = |b|.
В каком случае векторы равны?
Два (ненулевых) вектора a и b равны, если они равнонаправлены и имеют один и тот же модуль. Все нулевые векторы считаются равными. Во всех остальных случаях векторы не равны.
Какие векторы считаются противоположные?
Два вектора, имеющие равные модули и противоположно направленные, называются противоположными.
Что такое длина вектора?
Длина вектора – это число, равное корню из суммы квадратов координат вектора.
Как найти длину вектора если известны его координаты?
Итак, для нахождения длины вектора по координатам существуют следующие формулы −→|a|=√ax2+ay2 a → = a x 2 + a y 2 или −→|a|=√ax2+ay2+az2 a → = a x 2 + a y 2 + a z 2 , по координатам точек начала и конца вектора −−−→|AB|=√(bx−ax)2+(by−ay)2 A B → = ( b x — a x ) 2 + ( b y — a y ) 2 или −−−→|AB|=√(bx−ax)2+(by−ay)2+(bz−az) …
Когда векторы коллинеарны?
Определение. Два ненулевых вектора называются коллинеарными, если они лежат на одной прямой или на параллельных прямых. Нулевой вектор считается коллинеарным любому другому вектору.
Что такое модуль в физике?
в физике ( также как в математике ) модуль это значение числа отличное от отрицательного значения . Перемещение – это вектор соединяющий начальное положение тела с его конечным положением . Главное отличие перемещения от модуля перемещения , то что перемещение это векторная величина , а модуль перемещения – скалярная .
Как найти модуль скорости движения тела?
v = S/t = (x — x0)/t.
Полученный результат нужно разделить на то время, за которое имело место изменение координаты. Пример определения модуля скорости одного тела относительно другого на основе задачи: два тела перемещаются со скоростью 8 и 6 м/с. Направление их движения перпендикулярное друг другу.
Как найти модуль ускорения движения?
Модуль полного ускорения равен: a=√(v2R)2+(dvdt)2(16). Единицей измерения ускорения в Международной системе единиц (СИ) является метр на секунду в квадрате: [a]=мс2.
Интересные материалы:
Можно ли убрать длину каблука?
Можно ли убрать фото контакта в Вайбере?
Можно ли убрать лайк от пользователя в Инстаграм?
Можно ли убрать лишнюю кожу на животе?
Можно ли убрать подоконный блок в монолитном доме?
Можно ли убрать седые волосы?
Можно ли убрать шрамы от ветрянки?
Можно ли убрать спайки в маточных трубах?
Можно ли убрать стрелки на брюках?
Можно ли убрать татуаж бровей?
7.3. Разложение вектора по базису. Координаты вектора Модуль вектора. Направляющие косинусы
Пусть
— единичные векторы осей координат, т.е.
и каждый из них одинаково направлен с
координатными осями.
Тройка векторов
называется
координатным
базисом.
Теорема.
Любой вектор пространства можно разложить
по базису
,
т.е. представить
в виде
,
где
— некоторые числа (буквы:
— «мю»,
— «ню»).
Это разложение
единственное.
Доказательство.
Приложим вектор
к началу координат, обозначим его конец
.
Проведем
через точку
плоскости,
перпендикулярные осям координат. Пусть
,
,
— точки
пересечения этих плоскостей с осями
координат.
Существует
единственная тройка чисел
,
,
таких, что
.
Формула
называется
разложением вектора по координатному
базису.
Числа
,
,
— называются
координатами
вектора
,
т.е. координаты
вектора есть его проекции на соответствующие
координатные оси. В символическом виде
записывают
.
Например, если,
то его
координаты
.
Зная координаты
вектора
,
длину его можно найти по формуле
Если известны
координаты точек
и
,
то координаты вектора равны:
.
Пусть углы вектора
с осями
,
,
соответственно равны
,
,
.
Числа
,
,
называются
направляющими косинусами вектора
.
;
;
;
— основное
свойство направляющих косинусов вектора.
7.4. Действия над векторами, заданными координатами
Пусть векторы
и
заданы своими координатами.
При сложении
(вычитании) векторов их одноименные
координаты складываются (вычитаются),
т.е.
При умножении
вектора на число
координаты его умножаются на это число,
т.е.
.
Если вектор
коллинеарен вектору
,
то можно записать
,
где
— некоторое число, т.е.
,
,
.
Отсюда,
,
,
или
— условие коллинеарности векторов.
7.5. Деление отрезка в данном отношении
,
,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,,
Пусть даны координаты
точек
и
;
и отношение
.
Требуется найти координаты точки
.
Из равенства
векторов следует равенство соответствующих
координат:
.
Аналогично,
;
.
В частном случае:
— середина
отрезка, т. е.
е.
.
Пример.
Дан треугольник
,
где
,
,
.
Найти
координаты точки
—
пересечения
биссектрисы угла
со стороной
.
,
,
,
.
.
Ответ:
.
§ 8. Скалярное
произведение векторов
8.1. Определение
скалярного произведения
Определение.
Скалярным произведением вектора
на вектор
называется число
(скаляр),
равное произведению длин этих векторов
на косинус угла между ними.
Обозначается:
или
.
Найдем
проекцию вектора
на вектор
.
Из геометрии
известно
.
Умножим и разделим
левую часть на
:
,
аналогично находим
.
8.2. Свойства
скалярного произведения
1.
Доказательство.
.
2.
.
3.
.
4.
.
Определение:
Число, равное
,
называется скалярным
квадратом
вектора
.
5.
Скалярный квадрат вектора равен
квадрату его длины
.
Доказательство.
.
6.
Скалярное произведение базисных
векторов:
,
.
8.3. Вычисление
скалярного произведения векторов через
координаты
Теорема. Если
,
,
то
.
Доказательство.
Запишем векторы
и
в виде разложения по базису, т.е.
и
.
Тогда
По свойству
скалярного произведения базисных
векторов
:
Таким образом,
.
8.4. Приложения
скалярного произведения векторов
-
Установление
перпендикулярности ненулевых векторов:
.
|
Если |
— |
2. Вычисление
проекции вектора на вектор:
и
.
|
3. Определение |
,
т.е.
.
4. Работа постоянной
силы.
Если
точка перемещается прямолинейно из
положения
в положение
под действием силы
,
то работа по перемещению равна:
.
Пример 1.
К точке
приложены три силы
.
Вычислить
работу по перемещению точки
в точку
.
— равнодействующая
трех сил.
.
.
Пример 2.
Дано:
,
,
,
.
Найти угол между
векторами
и
.
Так как
или
.
,
,
Таким образом,
.
Пример 3.
Найти длину вектора
,
если
,
,.
«Вектор. Модуль вектора. Равенство векторов. Координаты вектора. Сложение векторов.»
Министерство образования, науки и молодежной политики Краснодарского края государственное бюджетное профессиональное образовательное учреждение Краснодарского края
«Лабинский социально-технический техникум»
Методическая разработка
урока математики
по теме:
«Вектор. Модуль вектора. Равенство векторов. Координаты вектора. Сложение векторов.»
Модуль вектора. Равенство векторов. Координаты вектора. Сложение векторов.»
Подготовила:
преподаватель математики
Пятакова З.В.
Лабинск, 2015
Вектор. Модуль вектора. Равенство векторов. Координаты вектора. Сложение векторов.
Цели урока:
Образовательные:Изучить, что такое “вектор в пространстве», как определяются координаты, вектора, если известны координаты его начала и конца, научится решать задачи, связанные с векторами.
Развивающие: расширение кругозора учащихся, формирование умений применять приёмы сравнивания, обобщения, выделения главного, переноса знаний в новую ситуацию, развитие мышления, речи, умение комментировать, развитие учебно-познавательных компетенций учащихся
Воспитательные: воспитывать трудолюбие, чувство товарищества и взаимопомощи, привитие навыков самооценки, умения работать в коллективе, умения правильно оценивать работуодногруппников,прививать интерес к предмету.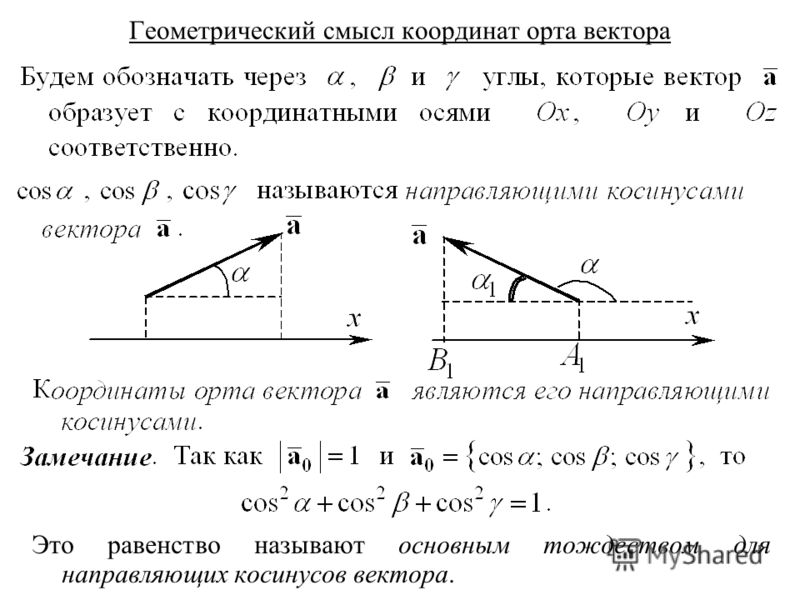
План урока:
-
Организационный момент.
-
Актуализация знаний.
-
Изучение нового материала.
-
Закрепление знаний.
-
Итоги урока.
-
Самостоятельная подготовка.
Оборудование: Интерактивная доска
Тип урока: Комбинированный.
Ход урока:
1. Организационный момент.
Приветствие учащихся, проверка готовности класса к уроку, организация внимания учащихся, раскрытие общих целей урока и плана его проведения.
2. Актуализация знаний
3. Изучение нового материала
Рассказ преподавателя:
ВЕКТОР. КООРДИНАТЫ ВЕКТОРА В ПРОСТРАНСТВЕ
В пространстве, как и на плоскости, вектором называется величина, которая задается своей длиной и направлением. Вектор изображатеся направленным отрезком, длина которого равна длине вектора.
(Слайд 2)
Буквально так же, как и на плоскости, определяются основные понятия для векторов в пространстве: абсолютная величина вектора, направление вектора, равенство векторов.
Но это не простое повторение, а обобщение, распространение свойств двумерной геометрии на трехмерную. Если в планиметрии для задания вектора достаточно указать две его координаты, то в стереометрии — три координаты.
Определение. Координатами вектора , начало которого точка A(x1,y1,z1), а конец — точкаВ(х2, у2, z2), называются числа a1= х2- x1, a2=y2-y1, a3=z2-z1.
Записывают такой вектор, указывая его координаты: (a1 а2, а3) или (a1 а2, а3).
(Слайд 3)
Например, если точки А(4; 0; 3) и B(0; 6; 4) — начало и конец направленного отрезка , тогда
а1 = 0 — 4 = -4, а2 = 6 — 0 = 6, а3 = 4 — 3 = 1.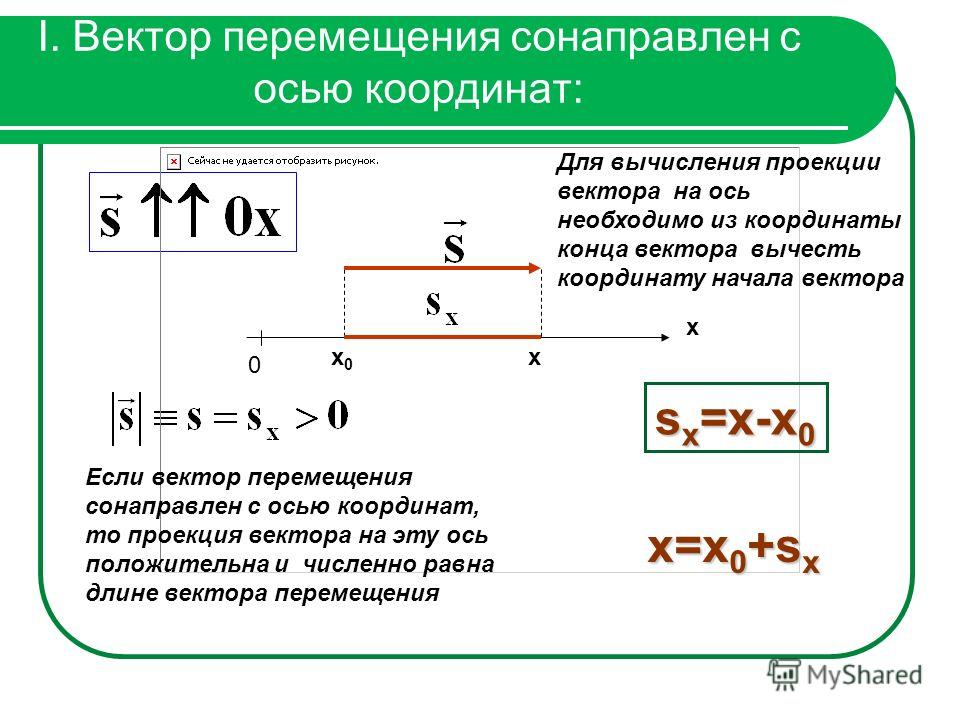
Значит, направленному отрезку соответствует вектор (-4; 6; 1) (рис. 67).
(Слайд 4)
Так же, как и на плоскости, равные векторы имеют соответственно равные координаты и, обратно, векторы с соответственно равными координатами равны. Это дает основание говорить о том, что любой вектор можно отложить от любой точки пространства.
(слайд 5)
Длину вектора (a1 а2, а3) можно выразить через его координаты. Отложим вектор от начала координат (рис. 68). Тогда четырехугольник OPAN — прямоугольник. Его стороны равны а1 и а2, поэтому ОАz2 = а12 + а22. В прямоугольном треугольнике ОА2 А второй катет Аz А = а3 и ОА2 = ОА2г + а32 = а12 + а22+ а32. Отсюда | | =
Отсюда | | =
Длина любого ненулевого вектора — число положительное. Длина нулевого вектора равна нулю.
Вспомним, что два вектора, лежащих на одной прямой или параллельных прямых, называютколлинеарными. Коллинеарные векторы бывают сонаправлены (а b) или противоположно направлены (а b). Если векторы ON и ОМ коллинеарны, то точки О, N, М лежат на одной прямой. Нулевые векторы не имеют направлений и считаются коллинеарными к любому вектору.
ДЕЙСТВИЯ НАД ВЕКТОРАМИ В КООРДИНАТАХ
Действия над векторами в пространстве осуществляются аналогично тому, как они определялись для векторов на плоскости.
Определение. Суммой векторов a (a1 а2, а3) и b(b1 b2, b3) называется вектор а + b с координатами (а1 + b1; а2 + b2 ; а3 + b3)
Для любых векторов а , b и с справедливы равенства:
-
а+b=b+а — переместительный закон сложения;
-
а + (b + с) = (а+ b) + с — сочетательный закон сложения.

Чтобы доказать эти свойства, достаточно сравнить соответствующие
координаты левой и правой частей каждого векторного равенства.
Для любых трех точек А, В, С в пространстве имеет место векторное равенство + = .
Действительно, для любых трех точек A(a1 а2, а3), B(b1 b2, b3), C(c1, с2, с3) (b1 – а1; b2 — а2;b3 — а3) и (с1 — bг; с2 — b2, с3 — b3).
Отсюда + = (с1 – а1; с2 — а2; с3 — а3).
Геометрически сумму двух векторов пространства можно находить, пользуясь правилам треугольника(рис. 69).
Также применяется и правило параллелограмма. Оно часто используется в физике.
Если ABCD — параллелограмм (рис. 70), то + = .
Чтобы найти сумму нескольких векторов, используем правило многоугольника. Например, если в пространстве даны точки А, В, С, D, Е, F, то всегда
АВ + ВС +CD + DE + EF = AF.
(слайд 6)
Определение. Два вектора, сумма которых равна нулевому вектору, называютсяпротивоположными.
Из определения следует, что у противоположных векторов соответствующие координаты имеют противоположные знаки.
Определение. Разностью векторов а и b называется такой вектор с , который в сумме с вектором bдает вектор а .
Если а (а1; а2; а3) и b( b1; b2; b3), то — = (а1 –b1; а2 — b2; а3 – b3).
-
Закрепление знаний
Работа студентов по слайдам. Решение задач у доски по желанию.
(слайд7)
(слайд 
(слайд9)
(слайд10)
5.Итоги урока.
Комментирование ответов и решений задач. Выставление отметок.
-
Самостоятельная подготовка.
Составить краткий опорный конспект.
Графическое представление векторов с полярными единичными векторами без преобразования в декартовы координаты
Есть две вещи, которые делают это запутанным. Во-первых, хотя вы можете быть знакомы с математикой, где есть одна декартова система координат и одна полярная система координат, с хорошо известными формулами преобразования из одной системы координат в другую, люди используют не только эти плоские системы координат.
Во-вторых, люди иногда используют одни и те же буквы для обозначения очень разных вещей, в зависимости от таких вещей, как наличие или отсутствие «шапки» над буквой.
В полярных координатах можно записать вектор положения $vec r$
$vec r = (r, theta).$ Этими координатами нельзя манипулировать, как декартовыми координатами вектора.
Декартовы координаты $(x,y)$ соответствуют векторной сумме с коэффициентами $x$ и $y,$, а именно
$x hat imath + y hat jmath$, где $hatimath$ и $hatjmath$ — единичные векторы в направлениях $x$ и $y$,
но нет общего способа записать $vec r$ в виде векторной суммы с коэффициентами $r$ и $theta.$
Однако иногда люди интересуются описанием точки в полярных координатах, а также хотят ответить на определенные вопросы о том, что происходит в этой точке, например, о скорости или ускорении частицы, находящейся там в какой-то момент. во время.
Что они иногда делают, так это создают декартову систему координат.
«заказные» для этой точки плоскости:
вместо использования обычных единичных векторов $hatimath$ и $hatjmath$, параллельных осям $x$ и $y$,
они смотрят на вектор $vec r$ от начала своих полярных координат до конкретной интересующей точки,
и они образуют единичный вектор $hat r$ в том же направлении, что и $vec r.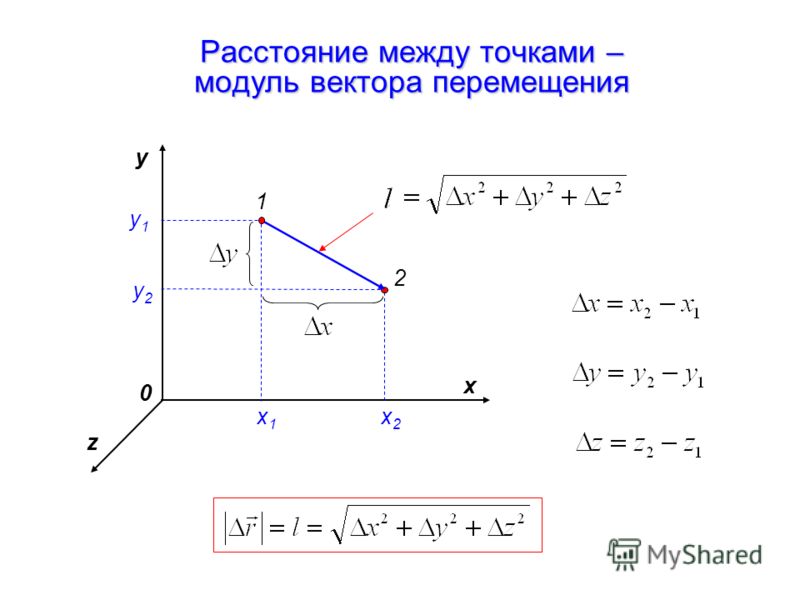
$
Затем они делают другой единичный вектор $hat theta$ перпендикулярным $hat r,$
обычно указывая в направлении возрастания полярной координаты $theta$.
Итак, рассматриваемая точка на расстоянии и в направлении $vec r$ от начала координат
уже имеет полярные координаты $(r,theta),$ и мы знаем, как получить из них второй набор координат, а именно декартовы координаты
$x = r costheta,$ $y = r sintheta$;
но теперь кто-то ввел третью систему координат , отличную от любой из этих.
Новая система координат является другой декартовой системой координат, но в общем случае она не ориентирована так же, как система координат $(x,y)$
(если только $theta$ не равно нулю или другому целому кратному $2pi$),
и мы обычно не считаем, что оно имеет то же начало, что и координаты $(x,y)$ или координаты $(r,theta)$.
Если мы вообще подумаем о его происхождении как о точке на плоскости,
мы, скорее всего, будем думать о точке $(r,theta)$ как о начале этой новой системы.
Было бы очень странно захотеть записать вектор координат , такой как вектор позиции $vec r$ в этой новой системе координат; обычно это не то, для чего предназначена новая система.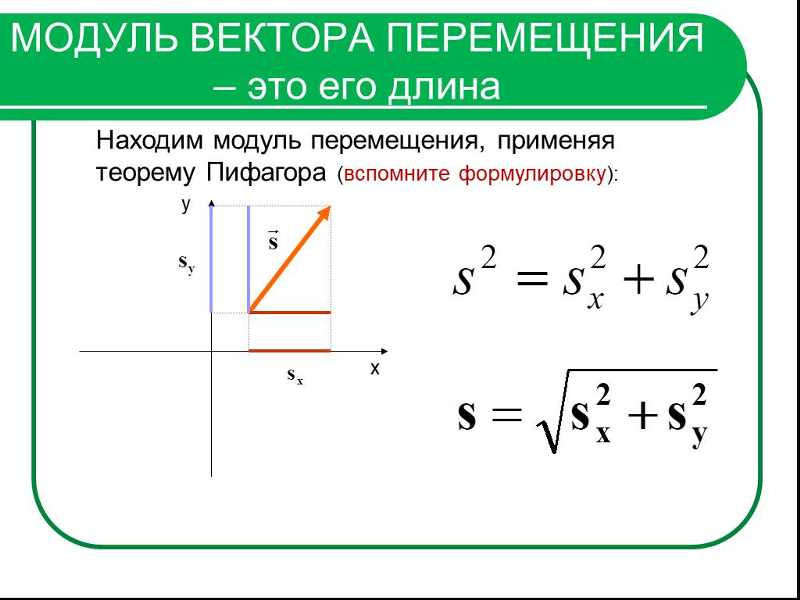 Но очень вероятно, что в этой новой системе координат желательно записать вектор скорости или вектор ускорения.
Но очень вероятно, что в этой новой системе координат желательно записать вектор скорости или вектор ускорения.
Я был бы удивлен, увидев такое уравнение, как
$vec r = 10hat r + 30hat theta$ написано в книге, потому что $vec r$ обычно является вектором положения, а вещь в правой части уравнения — нет;
но я бы совсем не удивился, увидев вектор скорости, написанный
$vec v = 10шляпа r + 30шляпа тета.$
Таким образом, когда вы видите выражение вроде $10hat r + 30hat theta,$
вы не ищете способ записи вектора с использованием полярных координат.
Вы смотрите на набор декартовых координат в специальной декартовой системе координат.
Поскольку эти координаты действительно декартовы, вы можете использовать обычные правила декартовых координат, чтобы добавить их (просто добавляя координаты)
или найти величину вектора (используя теорему Пифагора).
И вам точно стоит
а не попытка скопировать полярные координаты
любой точки в эту систему координат; то есть вообще
$$ (r = a,theta = b) neq a hat r + btheta$$
(точка с полярными координатами $(r,theta) = (a,b)$ не находится путем построения векторной суммы $a hat r + btheta$).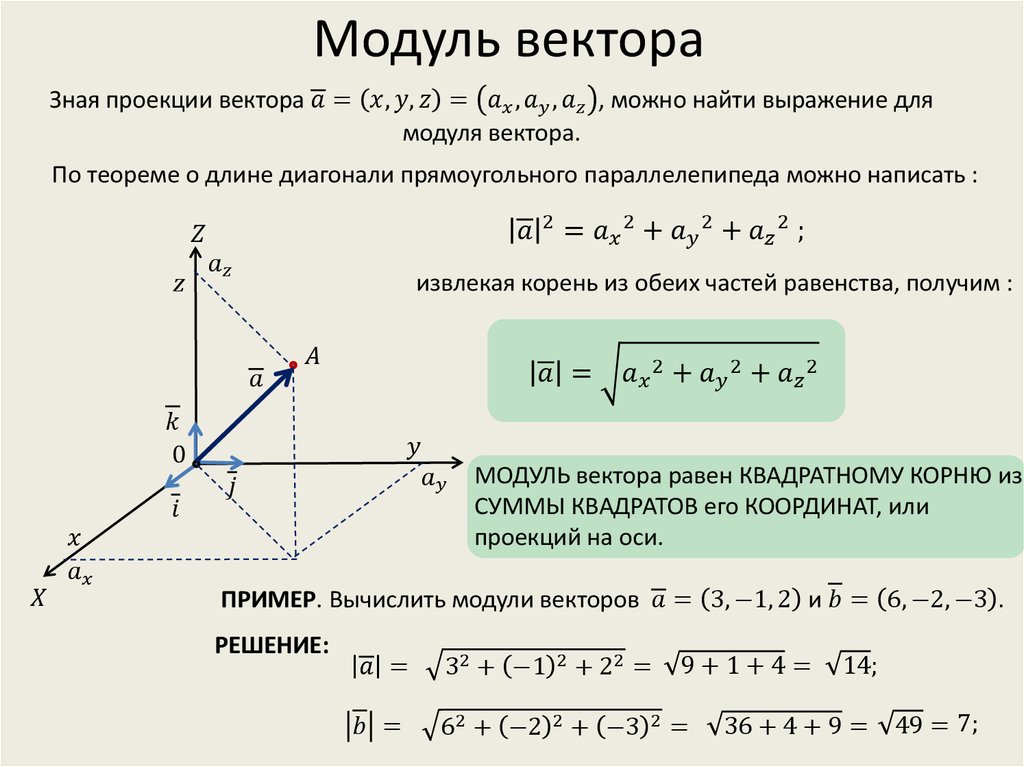
Как найти величину и направление вектора0003
Учебное пособие по физике I для чайников с онлайн-практикой
Изучить книгу Купить на Amazon
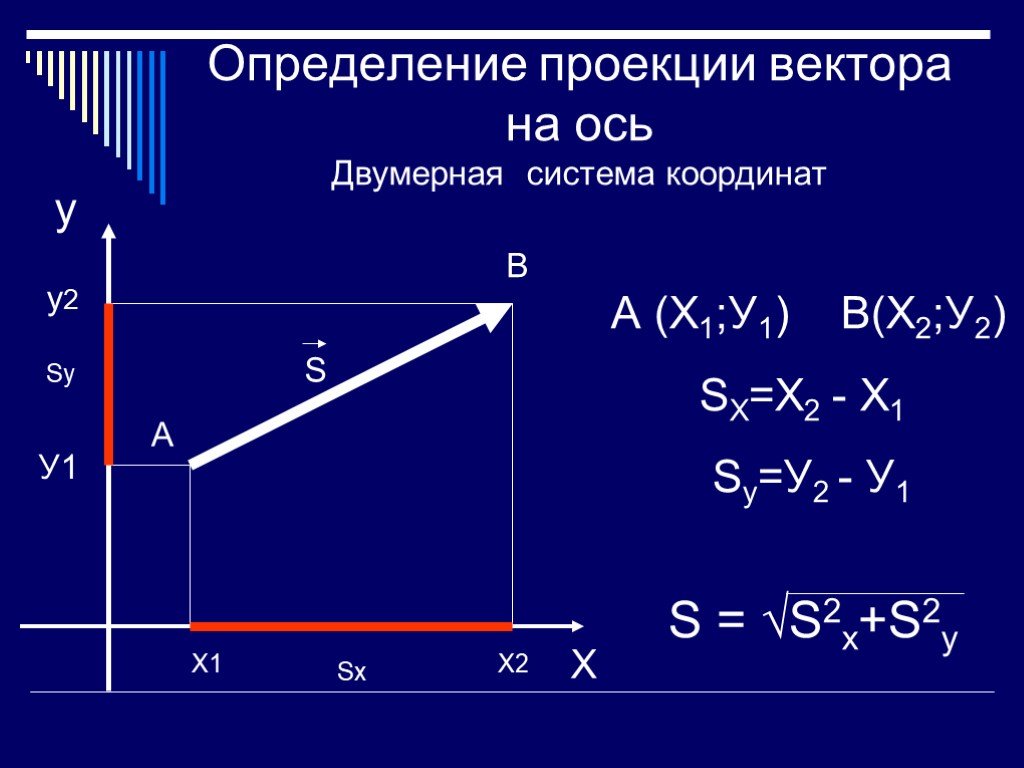
В физике, когда вам даны векторные компоненты, такие как (3, 4), вы можете легко преобразовать их в величину/угол. вектора с помощью тригонометрии.
Например, взгляните на вектор на изображении.
Предположим, вам известны координаты конца вектора и вы хотите найти его величину v и угол тета. Благодаря вашим познаниям в тригонометрии вы знаете
Где тангенс тета — тангенс угла. Это значит, что
тета = тангенс –1 ( y / x )
Предположим, что координаты вектора равны (3, 4). Вы можете найти угол тета как тангенс –1 (4/3) = 53 градуса.
Вы можете использовать теорему Пифагора, чтобы найти гипотенузу — величину, v — треугольника, образованного x, y, и v:
Подставьте числа для этого примера, чтобы получить
Итак, если у вас есть вектор, заданный координатами (3, 4), его величина равна 5, а угол равен 53 градусам.
Пример вопроса
-
Преобразование вектора, заданного координатами (1.0, 5.0), в формат величина/угол.
Правильный ответ: звездная величина 5,1, угол 79 градусов.
-
Примените теорему Пифагора, чтобы найти величину. Подставьте числа, чтобы получить 5.1.
-
Применить уравнение тета=тангенс –1 ( y / x ), чтобы найти угол. Подставьте числа, чтобы получить тангенс –1 (5,0/1,0) = 79 градусов.
-
Практические вопросы
-
Преобразование вектора (5.0, 7.0) в форму величины/угла.
-
Преобразование вектора (13.0, 13.0) в форму величины/угла.
-
Преобразование вектора (–1,0, 1,0) в форму величины/угла.
-
Преобразование вектора (–5,0, –7,0) в форму величины/угла.
Ниже приведены ответы на практические вопросы:
-
Величина 8,6, угол 54 градуса
-
Применить уравнение
, чтобы найти звездную величину, которая равна 8,6.
-
Примените уравнение theta = tan –1 ( y / x ), чтобы найти угол: tan –1 (7,0/5,0) = 54 градуса.
-
-
Величина 18,4, угол 45 градусов
-
Применить уравнение
, чтобы найти звездную величину, которая равна 18,4.
-
Примените уравнение theta = tan –1 ( y / x ), чтобы найти угол: tan –1 (13,0/13,0) = 45 градусов.
-
-
Величина 1,4, угол 135 градусов
-
Применить уравнение
, чтобы найти звездную величину, которая равна 1,4.
-
Примените уравнение тета = тангенс –1 ( y / x ), чтобы найти угол: tan –1 (1,0/–1,0) = –45 градусов.
Однако обратите внимание, что угол действительно должен быть между 90 и 180 градусами, потому что первая составляющая вектора отрицательна, а вторая положительна.
-