|
Как найти модуль перемещения тела (формула)?
Общая формула для всех видов движения по которой можно найти модуль перемещения выглядит так. s = x-x0, где х0 — начальная координата, х — координата через промежуток времени, за которое совершено перемещение. Для более простых видов перемещения есть частные формулы. Для равномерного прямолинейного движения x = x0 + vt, где м — скорость тела. Для равноускоренного прямолинейного движения x = x0 + v0t + (a t^2)/2. система выбрала этот ответ лучшим
Zolotynka 6 месяцев назад Прежде чем писать/запоминать формулу, давайте разберемся, что представляет собой само понятие перемещения тела — это разница между двумя положениями объекта. Далее: это векторная величина, потому что у нее также есть направление — от начальной позиции к финальной. Формула перемещения выглядит следующим образом: Sx = x — x0. __ Перемещение не обязательно всегда положительно, оно также может быть нулевым или отрицательным. Знаете ответ? |



В статье разберемся, что такое модуль. Модуль силы, скорости, импульса, что это всё? Давайте разбираться!
Абсолютная величина, известная так же, как модуль, это всегда некое неотрицательное число, чье определение всегда зависит от типа числа. Символически модуль обозначается как: | x |.
Сила и модуль силы
В процессе изучения физики приходится сталкиваться с различными явлениями, рассчитывать скорость, силу и многие другие параметры. Не менее важно понять какими методами, и в каких единицах делаются расчеты по характеристикам этих явлений. Одна из физических величин это сила. Сила представляет собой величину, которая способна показать меру воздействия на тело посредством другого тела или со стороны полей. Взаимодействие образуется за счет тех полей, которые создаются самими телами в случае контакта. Всего различают четыре вида взаимодействия: слабое, сильное, гравитационное, электромагнитное. Сила обозначается буквой F от латинского слова fortis, что в переводе означает сильный.
Что такое модуль силы?
Сила является векторной величиной, это значит, что она обладает, так как направлением, так и модулем. Не так часто встречается случай, когда на тело воздействует одна единственная величина, чаще всего их несколько. В таком случае речь о равнодействующей силы, которая формируется за счет суммирования всех сил, влияющие на тело одновременно. Стоит отметить, что параметр равнодействующая сила является искусственным и создан только для удобства проведения расчетов.
Но что же это модуль силы? Модуль является абсолютной величиной. Это такая величина, которая отражается числом с плюсом во всех случаях. Другими словами характеристики какого-то процесса или явления выражены конкретными числами. Каждая сила характеризуется направлением и величиной, эта величина и есть модуль, вот что это модуль силы.
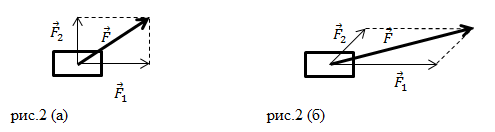
Модуль равнодействующих двух сил определяется по формулам:
- F=F1 + F2 (в случае сил с одинаковым направлением)
- F=F1 — F2 (силы с разным направлением)
Для модуля равнодействующих нескольких сил все намного сложнее. Для начала надо вводить систему координат, записать и высчитать проекции сил, потом использовать теорему Пифагоры.
Исаак Ньютон внес серьезный вклад в работу над различными видами сил. В связи с этим в качестве единицы измерения силы применяется Н (Ньютон).
Что это модуль скорости?
Каждое тело в процессе перемещения развивает энную скорость, которая характеризуется двумя параметрами: направление и модуль. Что же это модуль скорости? Это число, обозначающее, насколько быстро перемещается тело. Сама скорость является вектором. У нее есть все свойства вектора перемещения, так как выражается посредством него и обладает всеми свойствами данного вектора.
Для определения модуля скорости необходимо учитывать закон движения со всеми своими правилами. Вычисление модуля скорости может осуществляться посредством графика движения. Если недостаточно понятно, что это модуль скорости тела можно использовать одно из понятий: скалярная величина и алгебраическая скорость. Скорость как вектор это величина с направлением и численным значением, при этих условиях модуль скорости тела это не что иное, как длина этого вектора.
Чаще всего речь о прямолинейном движении в рамках координат (x;t). В таком случае для определения данного параметра подойдет формула:
v = S/t = (x — x0)/t.
Это значит, что необходимо нужно отнять начальную координату от конечной координаты. Полученный результат нужно разделить на то время, за которое имело место изменение координаты.
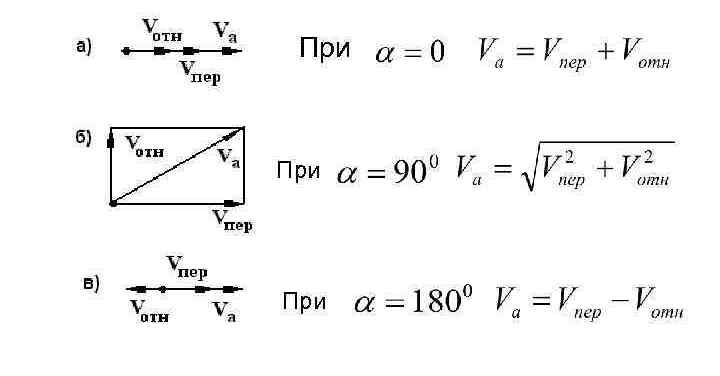
Пример определения модуля скорости одного тела относительно другого на основе задачи: два тела перемещаются со скоростью 8 и 6 м/с. Направление их движения перпендикулярное друг другу. Поэтапное решение осуществляется таким образом:
- Вычисляется скорость v21 на базе закона сложения скоростей v2 = v21 + v1, а значит v21 = v2 – v1.
- Определяется модуль скорости тела согласно теореме Пифагора.
Модуль импульса и модуль оси
Импульс представляет собой векторную величину, чье направление идентично направлению вектора скорости. Он может поменяться только в том случае, если произойдет изменение скорости под воздействием какой-то силы. Но что это модуль импульса и как он рассчитывается? Модуль импульса определяется согласно произведению массы тела на скорость. Его можно легко вычислить, если есть данные по скорости и по массе.
Что это модуль оси? Разъяснение данного понятия, может быть сделана на основе определения понятия ось. Ось представляет собой прямую с заданным направлением. В каком-то роде можно сказать, что это нечто иное, как вектор с величиной модуля, которая тянется к бесконечности. Это и есть модуль оси. Для обозначения оси можно использовать любую букву: t, Z, Y, X и т.д. На ней определяется точка О, известная как начало отсчета. Все расстояния до других точек определяются относительно нее. Для того чтобы сделать проекцию точки на ось, нужно провести перпендикулярную прямую через эту точку на саму ось. В таком случае проекция этой точки, сама точка.
Если материал был полезен, вы можете отправить донат или поделиться данным материалом в социальных сетях:
Скорость равномерного прямолинейного движения прямо пропорциональна перемещению тела и обратно пропорциональна значению времени этого перемещения.
v→=s→t.
Можно выразить перемещение из этой формулы, умножив обе части на значение времени: s→=v→⋅t.
О направлении векторов этих величин относительно друг друга можно судить, в частности, по уравнениям, записанным в векторной форме.
Проекция перемещения на ось (OX) рассчитывается по формуле
sx=vxt
, где (upsilon_x) — проекция скорости на ось (OX) принимает положительное значение, если направление перемещения совпадает с направлением оси (OX); принимает отрицательное значение, если перемещение противоположно направлено относительно оси (OX).
Если при решении задач направление движения не влияет на смысл условия и ход решения задачи, то направление векторных величин можно не учитывать. Тогда говорят о модулях величин, то есть их размере без учёта направления: (|vec{s}|=|vec{upsilon}|cdot t) можно заменить на s=vt.
При прямолинейном равномерном движении модуль перемещения равен пройденному пути: (|vec{s}|=s), если направление скорости совпадает с направлением вектора перемещения.
На рисунке представлена зависимость (v(t)) для равномерного движения.

Формула для расчета модуля перемещения: s=v1⋅t1.
Однако произведение v1⋅t1, т.е. скорости на промежуток времени, численно равно площади (S) закрашенной фигуры (в данном случае прямоугольника).
Это наблюдение позволяет сделать вывод; что при прямолинейном равномерном движении модуль перемещения численно равен площади прямоугольника, которые образуется между графиком скорости и осью времени. При этом необходимо учитывать моменты времени: начало наблюдения за объектом и конец наблюдения. В данном случае начало наблюдения соответствует точке (O,) а конец наблюдения — точке t1.
Можно говорить о равенстве пройденного пути и площади под графиком скорости.
Как найти модуль вектора перемещения
В кинематике для нахождения различных величин используются математические методы. В частности, чтобы найти модуль вектора перемещения, нужно применить формулу из векторной алгебры. В ней фигурируют координаты точек начала и конца вектора, т.е. первоначального и итогового положения тела.

Инструкция
Во время движения материальное тело меняет свое положение в пространстве. Его траектория может быть прямой линией или произвольной, ее длина составляет путь тела, но не расстояние, на которое оно переместилось. Эти две величины совпадают только в случае прямолинейного движения.
Итак, пусть тело совершило некоторое перемещение из точки А (х0, у0) в точку В (х, у). Чтобы найти модуль вектора перемещения, нужно вычислить длину вектора АВ. Начертите координатные оси и нанесите на них известные точки начального и конечного положения тела А и В.
Проведите отрезок из точки А в точку В, укажите направление. Опустите проекции его концов на оси и нанесите на графике параллельные и равные им отрезки, проходящие через рассматриваемые точки. Вы увидите, что на рисунке обозначился прямоугольный треугольник с катетами-проекциями и гипотенузой-перемещением.
По теореме Пифагора найдите длину гипотенузы. Этот метод широко применяется в векторной алгебре и носит название правила треугольника. Для начала запишите длины катетов, они равны разностям между соответствующими абсциссами и ординатами точек А и В:
ABx = x – x0 – проекция вектора на ось Ох;
ABy = y – y0 – его проекция на ось Оу.
Определите перемещение |AB|:
|AB| = √(ABx² + ABy²) = ((x – x0)² + (y – y0)²).
Для трехмерного пространства добавьте в формулу третью координату – аппликату z:
|AB| = √(ABx² + ABy² + ABz²) = ((x – x0)² + (y – y0)² + (z – z0)²).
Полученную формулу можно применять для любой траектории и типа движения. При этом величина перемещения обладает важным свойством. Она всегда меньше либо равна длине пути, в общем случае ее линия не совпадает с кривой траектории. Проекции – величины математические, могут быть как больше, так и меньше нуля. Однако это не имеет значения, поскольку в расчете они участвуют в четной степени.
Источники:
- модуль перемещения
Войти на сайт
или
Забыли пароль?
Еще не зарегистрированы?
This site is protected by reCAPTCHA and the Google Privacy Policy and Terms of Service apply.




1.1 Механическое движение — это изменение положения тела в пространстве, относительно других тел с течением времени.
Различают три вида движения:
– поступательное — это движение, при котором все точки тела двигаются одинаково, то есть в одну и ту же сторону с одной и той же скоростью — тело движется как целое;
– вращательное — все точки тела движутся по окружностям;
– колебательное — это движение, которое повторяется (почти повторяется). Существенно отличие от вращательного движения — при колебаниях движение происходит во взаимно противоположных направлениях.
1.2 Материальная точка — это тело, размерами которого можно пренебречь в условиях данной задачи; это тело, двигающееся поступательно (то есть любое тело при поступательном движении является материальной точкой).
1.3 Основная задача механики — определение положения движущегося тела в любой момент времени. За движением тела удобнее всего следить, отслеживая изменение его координат с течением времени. Чтобы измерить координаты, нужна система координат. Чтобы измерить время, необходимы часы. Все это вместе образуют систему отсчета.
1.4 Система отсчета: тело отсчета (абсолютно любое тело, относительно которого наблюдается движение), жестко связанная с этим телом система координат и часы.
1.5 При движении тело движется вдоль некоторой линии, называемой траекторией. В зависимости от выбранной системы отсчета траектория может выглядеть по-разному.
1.6 Путь (S, [S] = м/с) — это длина участка траектории, пройденного за данный промежуток времени.
1.7 Перемещение  — это вектор, соединяющий начальное положение тела с конечным.
— это вектор, соединяющий начальное положение тела с конечным.

В процессе движения путь может только увеличиваться, а перемещение и увеличиваться и уменьшаться. При прямолинейном движении в одном направлении путь равен модулю перемещения, в любом другом случае, когда тело движется по произвольной траектории — путь больше модуля перемещения (см. рис.). Самое главное: путь — величина скалярная; перемещение — величина векторная.
1.8 Модуль перемещения  — это длина вектора перемещения. Если нам известны проекции перемещения на оси координат
— это длина вектора перемещения. Если нам известны проекции перемещения на оси координат
 и
и  то модуль перемещения всегда можно найти по теореме Пифагора:
то модуль перемещения всегда можно найти по теореме Пифагора:

1.9 Радиус-вектор — вектор, начало которого совпадает с началом координат, а конец с положением тела в данный момент времени. Радиус-вектор позволяет задать положение точки в пространстве.
— вектор, начало которого совпадает с началом координат, а конец с положением тела в данный момент времени. Радиус-вектор позволяет задать положение точки в пространстве.
Проекции радиус-вектора на оси координат являются координатами тела в данный момент времени. Перемещение тела можно выразить, зная радиус-вектор в начальный и конечный моменты времени (см. рис.):

1.10 Закон движения — это закон, по которому радиус-вектор меняется со временем. Задача механики — определить координаты тела в любой момент времени, т. е. установить функцию 