Вычисление перемещения по графику проекции скорости
Из кодификатора по физике, 2020.
«1.1.3. Вычисление перемещения по графику зависимости υ(t).»
Теория
Пусть задан график зависимости проекции скорости  от времени t (рис. 1).
от времени t (рис. 1).
Проекция перемещении тела  за промежуток времени от
за промежуток времени от  до
до  численно равна по величине площади фигуры, ограниченной графиком
численно равна по величине площади фигуры, ограниченной графиком ") , осью времени 0t и перпендикулярами к и (см. рис. 1, площадь выделена штриховкой).
, осью времени 0t и перпендикулярами к и (см. рис. 1, площадь выделена штриховкой).

Проекцию перемещения на ось 0Х будем считать:
— положительной, если проекция скорости на данную ось будет положительной (тело движется по направлению оси) (см. рис. 1);
— отрицательной, если проекция скорости на данную ось будет отрицательной (тело движется против оси) (рис. 2).
Путь s может быть только положительным:

Напоминаем формулы для расчета площадей фигур:
— прямоугольника – 
— треугольника – 
— трапеции – 
Задачи
Задача 1. По графику проекции скорости тела (рис. 3) определите проекцию его перемещения между 1 и 5 с.
Ответ: ____ м.

Решение. Проекция перемещения за промежуток времени Δt=–=5с–1с=4c численно равна площади фигуры, ограниченной графиком , осью времени 0t и перпендикулярами к  с и
с и  с (рис. 4, площадь выделена штриховкой). Фигура ABCD — это трапеция, ее площадь равна
с (рис. 4, площадь выделена штриховкой). Фигура ABCD — это трапеция, ее площадь равна

где DC = Δt = 4 c, AD = 3 м/c, BC = 5 м/c. Тогда S = 16 м.
Проекция перемещения  , т.к. проекция скорости
, т.к. проекция скорости  .
.
 м.
м.
Ответ: 16.

Задача 2. Автомобиль движется по прямой улице вдоль оси X. На рисунке 5 представлен график зависимости проекции скорости автомобиля от времени. Определите путь, пройденный автомобилем в течение указанных интервалов времени.
| Интервал времени | Путь |
| от 0 до 10 с | Ответ: м. |
| от 30 до 40 с | Ответ: м. |
В бланк ответов перенесите только числа, не разделяя их пробелом или другим знаком.

Решение. Путь за промежуток времени Δt = – численно равна площади фигуры, ограниченной графиком ,") осью времени 0t и перпендикулярами к и .
осью времени 0t и перпендикулярами к и .
На интервале [0 с, 10 с] ищем площадь треугольника (рис. 6).
 ,
,
где a = 20 м/c,  . Тогда
. Тогда  м.
м.
Путь равен значению площади (путь всегда положительный, т.е. s > 0).
 м.
м.
На интервале [30 с, 40 с] ищем площадь трапеции (см. рис. 6).
 ,
,
где a = 10 м/c, b = 15 м/c, h = Δt = 40 c – 30 с = 10 с. Тогда  м.
м.
Ответ: 100125.

Задача 3. Определите за первые 4 с (рис. 7):
а) проекцию перемещения тела;
б) пройденный путь.
Ответ: а) ____ м; б) ____ м.

Решение. Проекция перемещения за время  (пер-вые 4 с) численно равна площади фигуры, ограниченной графиком , осью времени 0t и перпендикулярами к
(пер-вые 4 с) численно равна площади фигуры, ограниченной графиком , осью времени 0t и перпендикулярами к  с и
с и  с (рис. 8, площадь выделена штриховкой).
с (рис. 8, площадь выделена штриховкой).
Так как при  с проекция скорости поменяла знак, то получили две фигуры, два треугольника, площади которых равны:
с проекция скорости поменяла знак, то получили две фигуры, два треугольника, площади которых равны:
 ,
,
где
 м/с,
м/с, 
 =|-10 м/c|=10 м/c,
=|-10 м/c|=10 м/c,  .
.
Тогда  м,
м,  м.
м.
а) Проекция перемещения  , т.к. проекция скорости
, т.к. проекция скорости  ; проекция перемещения
; проекция перемещения  , т.к. проекция скорости
, т.к. проекция скорости  . В итоге получаем:
. В итоге получаем:  45м — 5м = 40 м. б) Путь равен значению площади (путь всегда положительный, т.е. s>0).
45м — 5м = 40 м. б) Путь равен значению площади (путь всегда положительный, т.е. s>0).
 , s = 45 м + 5 м = 50 м.
, s = 45 м + 5 м = 50 м.
Ответ: а) 40; б) 50.

Задача 4. График зависимости проекции скорости материальной точки, движущейся вдоль оси 0Х, от времени изображен на рисунке 9. Определите перемещение точки, которое она совершила за первые 6 с.
Ответ: ____ м.

Решение. Проекция перемещения за время  (пер-вые 6 с) численно равна площади фигуры, ограниченной графиком , осью времени 0t и перпендикулярами к
(пер-вые 6 с) численно равна площади фигуры, ограниченной графиком , осью времени 0t и перпендикулярами к  и
и  (рис. 10, площадь выделена штриховкой).
(рис. 10, площадь выделена штриховкой).
Так как при  и
и  проекция скорости меняет знак, то получили три фигуры, три треугольника, площади которых равны:
проекция скорости меняет знак, то получили три фигуры, три треугольника, площади которых равны:

где
 м/с,
м/с, 
 |-2 м/c| = 2 м/с,
|-2 м/c| = 2 м/с, 
3м/c,  .
.
Тогда  м,
м,  м,
м,  м.
м.
Проекция перемещения , т.к. проекция скорости .
Проекция перемещения , т.к. проекция скорости . Проекция перемещения  , т.к. проекция скорости
, т.к. проекция скорости  . В итоге получаем:
. В итоге получаем:
 3 м – 2 м + 3 м = 4 м.
3 м – 2 м + 3 м = 4 м.
Ответ: 4.

Задача 5. На рисунке приведен график зависимости  скорости тела от времени
скорости тела от времени  .
.

Определите путь, пройденный телом в интервале времени от 0 до 5 с.
Ответ: ____ м.
Решение. Решение любых графических задач основывается на умении «читать» графики. В данной задаче рассматривается зависимость проекции скорости тела от времени. На интервале от 0 до 3с проекция скорости уменьшается от значения 15 м/с до 0. На интервале от 3 до 5с модуль проекции начинает возрастать от нулевого значения до 10 м/с. Причем важно «увидеть», что тело в этом временном интервале начинает движение в направлении, противоположном оси ОХ.
Пройденный путь будет определяться площадью геометрической фигуры, образованной под графиком проекции скорости.
Рис.1

Дальнейшее решение задачи сводится к нахождению площадей двух треугольников, заштрихованных на рис.1
 (м).
(м).
 (м).
(м).
Тогда, общий путь в интервале времени от 0 до 5с будет определяться суммой отдельных путей  и
и  .
.

 (м).
(м).
Ответ: 32,5 м
По условию этой задачи можно поставить второй вопрос: найти проекцию перемещения в интервале времени от 0 до 5с.
В этом случае надо учесть, что проекция перемещения в интервале времени от 0 до 3 с положительная и её значение равно пройденному пути на этом интервале.
 (м).
(м).
В интервале времени от 3 с до 5 с проекция перемещения отрицательная, так как тело движется в направлении противоположном оси ОХ.
 (м).
(м).
Проекция перемещения за весь интервал времени будет равна 
=12,5") (м).
(м).
Ответ: 12,5 м
Задача 6. На рисунке представлен график зависимости модуля скорости v прямолинейно движущегося тела от времени t. Определите по графику путь, пройденный телом в интервале времени от 1 до 5 с.

Ответ: ____ м.
Решение. Для нахождения пройденного пути в интервале времени от 1с до 5с необходимо рассчитать площадь геометрической фигуры под графиком модуля скорости.
Рис.1

Дальнейшее решение сводится к расчету площади трапеции, заштрихованной на графике (см. рис.1).
 (м).
(м).
Особенностью подобной задачи является то, что при решении, необходимо внимательно отследить временной интервал, на котором требуется рассчитать пройденный путь.
Ответ: 30 м.
Задача 7. Из двух городов навстречу друг другу с постоянной скоростью двиижутся два автомобиля. На графике показана зависимость расстояния между автомобилями от времени. Скорость первого автомобиля равна 15 м/с. Какова скорость второго автомобиля?

Ответ: ____ м.
Решение. При движении навстречу друг к другу расстояние между двумя автомобилями уменьшается от значения 144 км до 0. На графике видно, что встреча автомобилей произошла в момент времени 60 минут, так как расстояние между автомобилями стало равным 0. Расчеты в этой задаче требуют обязательного применения системы «СИ».
144 км = 144000 м; 60 мин = 3600 с.
Используя эти данные, можно рассчитать скорость сближения автомобилей.
 м/с
м/с
Так как автомобили движутся навстречу друг другу, то  отсюда скорость второго автомобиля можно выразить как
отсюда скорость второго автомобиля можно выразить как 
 (м/с)
(м/с)
Ответ: 25 м/с.
Задача 8. На рисунке представлен график зависимости модуля скорости тела от времени. Найдите путь, пройденный телом за время от момента времени 0 с до момента времени 5 с. (Ответ дайте в метрах.)

Ответ: ____ м.
Решение. Для нахождения пройденного пути необходимо рассчитать площадь геометрической фигуры (трапеции) под графиком модуля скорости (см.рис.1). Это относится к интервалу времени от 0 до 3 с. От 3 с до 5 с скорость тела равна 0, следовательно, тело находилось в состоянии покоя и пройденный путь в этом интервале равен 0.
Рис.1

 (м).
(м).

 (м).
(м).
Сакович А.Л., 2020
Благодарим за то, что пользуйтесь нашими статьями.
Информация на странице «Вычисление перемещения по графику проекции скорости» подготовлена нашими авторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать необходимые и поступить в высшее учебное заведение или техникум нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы Траектория и Путь), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.
На рис. 1.1:
![]()
Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия.
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).
Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения ![]() (см.рис. 1.3).
(см.рис. 1.3).
Выберем ось ОХ так, чтобы вектор ![]() лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
Sx = AxBx
ВАЖНО!
Напоминаю для тех, кто не очень хорошо знает математику: не путайте вектор ![]() с проекцией вектора на какую-либо ось (например, Sx). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.
с проекцией вектора на какую-либо ось (например, Sx). Вектор всегда обозначается буквой или несколькими буквами, над которыми находится стрелка. В некоторых электронных документах стрелку не ставят, так как это может вызвать затруднения при создании электронного документа. В таких случаях ориентируйтесь на содержание статьи, где рядом с буквой может быть написано слово «вектор» или каким-либо другим способом вам указывают на то, что это именно вектор, а не просто отрезок.
Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть
Sx = x – x0
Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
Sy = y – y0 Sz = z – z0
Здесь x0, y0, z0 — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).
Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х0 и у0, то есть А(х0, у0). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).
Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
Sx = x – x0 Sy = y – y0
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора, с помощью которой можно найти модуль вектора перемещения, так как
АС = sx CB = sy
По теореме Пифагора
S2 = Sx2 + Sy2
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:
![]()
Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
С понятием пути вы уже неоднократно сталкивались. Познакомимся теперь с новым для вас понятием – перемещением, которое более информативно и полезно в физике, чем понятие пути.
.")
Допустим, из пункта А в пункт В на другом берегу реки нужно переправить груз. Это можно сделать на автомобиле через мост, на катере по реке или на вертолёте. В каждом из этих случаев путь, пройденный грузом, будет разным, но перемещение будет неизменным: из точки А в точку В.
Перемещением называют вектор, проведённый из начального положения тела в его конечное положение. Вектор перемещения показывает расстояние, на которое переместилось тело, и направление перемещения. Обратите внимание, что направление перемещения и направление движения – два разных понятия. Поясним это.

Рассмотрим, например, траекторию движения автомобиля от пункта А до середины моста. Обозначим промежуточные точки – В1, В2, В3 (см. рисунок). Вы видите, что на отрезке АВ1 автомобиль ехал на северо-восток (первая синяя стрелка), на отрезке В1В2 – на юго-восток (вторая синяя стрелка), а на отрезке В2В3 – на север (третья синяя стрелка). Итак, в момент проезда моста (точки В3) направление движения характеризовалось синим вектором В2В3, а направление перемещения – красным вектором АВ3.
Итак, перемещение тела – векторная величина, то есть имеющая пространственное направление и числовое значение (модуль). В отличие от перемещения, путь – скалярная величина, то есть имеющая только числовое значение (и не имеющая пространственного направления). Путь обозначают символом l, перемещение обозначают символом  (важно: со стрелочкой). Символом s без стрелочки обозначают модуль перемещения. Примечание: изображение любого вектора на чертеже (в виде стрелки) или упоминание его в тексте (в виде слова) делает необязательным наличие стрелочки над обозначением.
(важно: со стрелочкой). Символом s без стрелочки обозначают модуль перемещения. Примечание: изображение любого вектора на чертеже (в виде стрелки) или упоминание его в тексте (в виде слова) делает необязательным наличие стрелочки над обозначением.
Почему в физике не ограничились понятием пути, а ввели более сложное (векторное) понятие перемещения? Зная модуль и направление перемещения, всегда можно сказать, где будет находиться тело (по отношению к своему начальному положению). Зная путь, положение тела определить нельзя. Например, зная лишь, что турист прошёл путь 7 км, мы ничего не можем сказать о том, где он сейчас находится.
Задача. В походе по равнине турист прошёл на север 3 км, затем повернул на восток и прошел ещё 4 км. На каком расстоянии от начальной точки маршрута он оказался? Начертите его перемещение.
Решение 1 – с измерениями линейкой и транспортиром.

Перемещение – это вектор, соединяющий начальное и конечное положения тела. Начертим его на клетчатой бумаге в масштабе: 1 км – 1 см (чертёж справа). Измерив линейкой модуль построенного вектора, получим: 5 см. Согласно выбранному нами масштабу, модуль перемещения туриста равен 5 км. Но напомним: знать вектор – значит знать его модуль и направление. Поэтому, применив транспортир, определим: направление перемещения туриста составляет 53° с направлением на север (проверьте сами).
Решение 2 – без использования линейки и транспортира.
Поскольку угол между перемещениями туриста на север и на восток составляет 90°, применим теорему Пифагора и найдём длину гипотенузы, так как она одновременно является и модулем перемещения туриста:

Как видите, это значение совпадает с полученным в первом решении. Теперь определим угол α между перемещением (гипотенузой) и направлением на север (прилежащим катетом треугольника):

Итак, задача решена двумя способами с совпадающими ответами.
На прошлом уроке мы научились находить координаты движущегося тела в определенный момент времени. Для этого мы использовали вектор перемещения, а точнее — его проекцию: $s_x = x_2 space − space x_1$. Итак, зная проекцию вектора перемещения и начальную координату тела, мы находили интересующую нас координату $x_2$, которую тело имеет по прошествии какого-то времени: $x_2 = x_1 space + space s_x$.

Но что делать, если вектор перемещения изначально не задан? На данном уроке вы узнаете, как его определить в самом простом случае — при прямолинейном и равномерном движении тела. А также вам предстоит знакомство с графиками зависимости модуля скорости и ее проекции от времени (они помогут нам в нахождении модуля и проекции перемещения) и уравнением движения тела.
Формулы скорости и перемещения в векторной форме
Для начала вспомним определение прямолинейного равномерного движения (рисунок 1).
Прямолинейное равномерное движение — это движение, при котором тело движется по прямолинейной траектории и проходит за любые равные промежутки времени одинаковые пути.

При таком движении перемещение тела с течением времени увеличивается. Быстроту этого увеличения характеризует скорость.
Что называется скоростью равномерного прямолинейного движения?
Скорость равномерного прямолинейного движения — это постоянная векторная величина, равная отношению перемещения тела за любой промежуток времени к значению этого промежутка:
$vec upsilon = frac{vec s}{t}$.
Скорость — это векторная величина: она имеет как направление, так и численное значение (ее модуль). Обратите внимание, что скорость при равномерном прямолинейном движении постоянна: не изменяется ни ее модуль, ни ее направление.
Теперь давайте выразим из формулы скорости искомое перемещение:
$vec s = vec upsilon t$.
Хорошо, теперь у нас есть формула для перемещения. Но она в векторной форме. С одной стороны, это дает нам возможность судить о том, как скорость и перемещение направлены относительно друг друга. Из наших формул видно, что при прямолинейном равномерном движении эти величины сонаправлены друг другу.
С другой стороны, в таком виде мы не сможем использовать формулу перемещения для расчетов. Теперь нам нужно получить формулу для проекции вектора перемещения.
Формула перемещения для практического использования
Итак, при решении задач нам понадобится формула, в которую будут входить проекции векторов на ось.
Как найти проекцию вектора перемещения тела, движущегося прямолинейно и равномерно, если известны проекция вектора скорости и время движения?
$s_x = upsilon_x t$.
Обратите внимание, что проекции $s_x$ и $upsilon_x$ могут иметь знак «минус». Это будет означать, что соответствующий проекции вектор направлен противоположно выбранной оси.
Например, если вектор скорости $vec upsilon_1$ сонаправлен оси OX (рисунок 2), то проекция скорости будет больше нуля: $upsilon_{1x} > 0$. Если же скорость $vec upsilon_2$ направлена против оси OX, то проекция этого вектора будет отрицательной: $upsilon_{2x} < 0$.

Мы не изображаем на рисунках и схемах проекцию вектора скорости подобно проекции вектора перемещения (мы рассчитываем проекцию вектора скорости по вышеприведенной формуле). Нам достаточно знать, что при равномерном прямолинейном движении вектор скорости всегда сонаправлен с вектором перемещения. Так, если тело двигалось противоположно направлению координатной оси, то проекция вектора перемещения будет отрицательной. Используя формулу $upsilon_x = frac{s_x}{t}$, мы получим отрицательную проекцию вектора скорости.
Модуль вектора перемещения и путь
Иногда мы можем встретить задачи, при решении которых нам будет неважно направление векторов перемещения и скорости. Тогда мы можем использовать уже знакомую вам формулу, в которой фигурируют модули величин:
$s = upsilon t$.
Используя эту формулу ранее, мы называли величину $s$ пройденным путем, а теперь называем ее перемещением. Ошибки здесь нет — это частный случай, когда путь равен модулю перемещения (рисунок 3).

При каком условии модуль вектора перемещения, совершенного телом за некоторый промежуток времени, равен пути, пройденному телом за тот же промежуток времени?
При движении в одном направлении модуль вектора перемещения, совершенного телом за некоторый промежуток времени, равен пути, пройденному этим телом за тот же промежуток времени.
Взгляните на рисунок 4, подтверждающий этот факт.

Если тело (автомобиль на рисунке 4) движется в одном направлении (например, из точки $O$ в точку $A$ или из точки $O$ в точку $C$), модуль вектора перемещения равен пройденному пути. Если же направление движения тела изменяется (например, при движении из точки $O$ в точку $B$ и обратно в точку $O$ или при движении по криволинейной траектории из точки $O$ в точку $D$), то путь, пройденный телом, будет больше модуля его перемещения.
График зависимости модуля вектора скорости от времени
Рассмотрим график зависимости модуля вектора скорости $upsilon$ от времени $t$. Тело при этом движется равномерно и прямолинейно (рисунок 5).

Модуль вектора перемещения $s$ в данном случае мы можем рассчитать по формуле:
$s = upsilon_1 t_1$.
А теперь взгляните на закрашенный зеленым цветом прямоугольник на рисунке 5. Его площадь $S$ по определению будет равна произведению его смежных сторон — $upsilon_1$ (длины отрезка $O upsilon_1$) и $t_1$ (длины отрезка $O t_1$).
При прямолинейном равномерном движении тела модуль вектора его перемещения численно равен площади прямоугольника (площади под графиком скорости), заключенного между графиком скорости, осью Ot и перпендикулярами к этой оси, восстановленными из точек, соответствующих моментам начала и конца наблюдения (в данном случае из точек $O$ и $t_1$).
График зависимости проекции вектора скорости от времени
И все-таки, чаще мы будем иметь дело с задачами, при решении которых нам понадобится использовать проекции векторов.
Например, обратимся к задаче с катерами из прошлого урока. Два катера двигаются в противоположных направлениях (рисунок 6). Один из них проходит $60 space км$, а другой — $50 space км$. Пусть эти перемещения совершены за время $t_1$, равное $2 space ч$.

В этом случае векторы скорости и перемещения первого катера будут сонаправлены друг другу, как и векторы скорости и перемещения второго катера. Их проекции: для первого катера они будут положительными, а для второго — отрицательными.
Проекция скорости первого катера:
$s_{1x} = upsilon_{1x} t_1$,
$upsilon_{1x} = frac{s_{1x}}{t_1}$,
$upsilon_{1x} = frac{60 space км}{2 space ч} = 30 frac{км}{ч}$.
Проекция скорости второго катера:
$upsilon_{2x} = frac{s_{2x}}{t_1}$,
$upsilon_{2x} = frac{−50 space км}{2 space ч} = −25 frac{км}{ч}$.
А теперь взгляните на графики зависимости проекций векторов скорости от времени (рисунок 7).

Какую информацию о движении двух тел можно получить по графикам, изображенным на рисунке 7?
Здесь мы видим и числовые значения проекций векторов скорости, и их знаки, а также знаки проекций перемещений, которые совершили катера за время $t_1$. Проекции этих перемещений численно равны площадям под графиками:
- проекция вектора перемещения $s_{1x}$ больше нуля и численно равна площади оранжевого прямоугольника;
- проекция вектора перемещения $s_{2x}$ меньше нуля и численно равна площади голубого прямоугольника.
Уравнение движения
Теперь получим формулу для определения координаты тела при неизвестном векторе перемещения.
Рассмотрим автомобиль, который двигается равномерно и прямолинейно по какому-то участку дороги (рисунок 8). За тело отсчета возьмем светофор и направим ось OX в сторону движения автомобиля.

Чему будет равна проекция перемещения автомобиля из точки с координатой $x_0$ в точку с координатой $x$?
По определению проекции:
$s_x = x space − space x_0$.
По определению проекции скорости:
$s_x = upsilon_x t$.
Приравняем правые части этих уравнений друг к другу:
$upsilon_x t = x space − space x_0$.
Теперь выразим отсюда искомую координату $x$ и получим кинематический закон движения или уравнение движения.
Для определения координаты движущегося тела в любой момент времени достаточно знать его начальную координату и проекцию скорости движения на ось:
$x = x_0 space + space upsilon_x t$.
Упражнения
Упражнение №1
Может ли график зависимости модуля вектора скорости от времени располагаться под осью Ot (то есть в области отрицательных значений оси скорости)?
Посмотреть ответ
Скрыть
Ответ:
График зависимости модуля вектора скорости от времени (рисунок 5) не может располагаться под осью Ot. Причина этому — само определение модуля какой-либо величины. Модуль — это всегда положительная величина.
Упражнение №2
Постройте графики зависимости проекций векторов скорости от времени для трех автомобилей, движущихся прямолинейно и равномерно, если два из них едут в одном направлении, а третий — навстречу им. Скорость первого автомобиля равна $60 frac{км}{ч}$, второго — $80 frac{км}{ч}$, а третьего — $90 frac{км}{ч}$.
Посмотреть ответ
Скрыть
Ответ:
Графики зависимости проекций векторов скорости от времени для трех автомобилей показаны на рисунке 9.

Автомобили движутся равномерно. Значит, скорость не изменяется с течением времени — графики представляют собой прямые, параллельные оси времени Ot.
Первые два автомобиля движутся в одном направлении — мы примем его за направление оси OX. Поэтому проекции векторов скорости $upsilon_{1x}$ и $upsilon_{2x}$ будут положительными. Третий автомобиль двигается в противоположную сторону. Значит, проекция его вектора скорости $upsilon_{3x}$ будет отрицательной.
Траектория, длина пути, вектор перемещения
Траектория движения тела – это линия, которая была описана материальной точкой при перемещении из одной точки в другую с течением времени.
Виды движений тела
Существуют несколько видов движений и траекторий твердого тела:
- поступательное;
- вращательное, то есть движение по окружности;
- плоское, то есть перемещение по плоскости;
- сферическое, характеризующее движение по поверхности сферы;
- свободное, иначе говоря, произвольное.
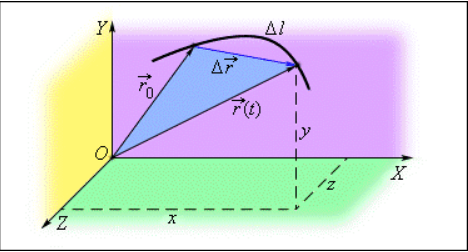
Рисунок 1 . Определение точки при помощи координат x = x ( t ) , y = y ( t ) , z = z ( t ) и радиус-вектора r → ( t ) , r 0 → является радиус-вектором точки в начальный момент времени
Положение материальной точки в пространстве в любой момент времени может быть задано при помощи закона движения, определенный координатным способом, через зависимость координат от времени x = x ( t ) , y = y ( t ) , z = z ( t ) или от времени радиус-вектора r → = r → ( t ) , проведенного из начала координат к заданной точке. Это показано на рисунке 1 .
Перемещение тела
Перемещение тела s → = ∆ r 12 → = r 2 → — r 1 → – направленный отрезок прямой, соединяющий начальную с конечной точкой траектории тела. Значение пройденного пути l равняется длине траектории, пройденной телом за определенный промежуток времени t .
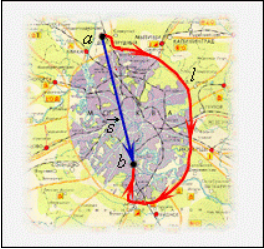
Рисунок 2 . Пройденный путь l и вектор перемещения s → при криволинейном движении тела, a и b – начальная и конечная точки пути, принятые в физике
По рисунку 2 видно, что при движении тела по криволинейной траектории модуль вектора перемещения всегда меньше пройденного пути.
Перемещение принято считать векторной величиной. Этот отрезок имеет направление.
Путь – скалярная величина. Считается числом.
Сумма двух последовательных перемещений из точки 1 в точку 2 и из токи 2 в точку 3 является перемещением из точки 1 в точку 3 , как показано на рисунке 3 .
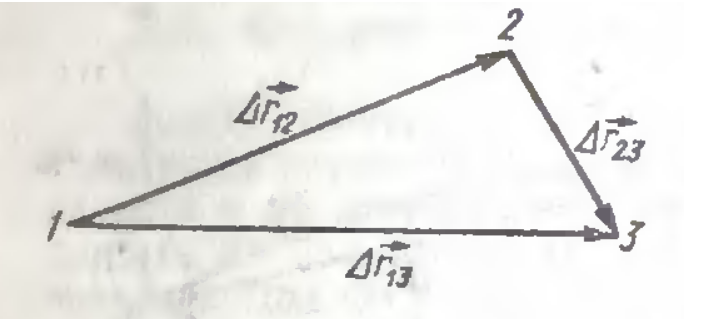
Рисунок 3 . Сумма двух последовательных перемещений ∆ r → 13 = ∆ r → 12 + ∆ r → 23 = r → 2 — r → 1 + r → 3 — r → 2 = r → 3 — r → 1
Когда радиус-вектор материальной точки в определенный момент времени t является r → ( t ) , в момент t + ∆ t есть r → ( t + ∆ t ) , тогда ее перемещение ∆ r → за время ∆ t равняется ∆ r → = r → ( t + ∆ t ) — r → ( t ) .
Перемещение ∆ r → считается функцией времени t : ∆ r → = ∆ r → ( t ) .
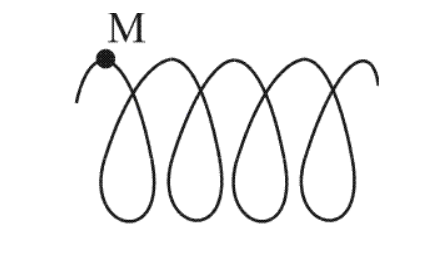
По условию дан движущийся самолет, представленный на рисунке 4 . Определить вид траектории точки М .
Необходимо рассмотреть систему отсчета I , называемую «Самолет» с траекторией движения точки М виде окружности.

Будет задана система отсчета II «Земля» с траекторией движения имеющейся точки М по спирали.
Дана материальная точка, которая совершает движение из А в В . Значение радиуса окружности R = 1 м . Произвести нахождение S , ∆ r → .
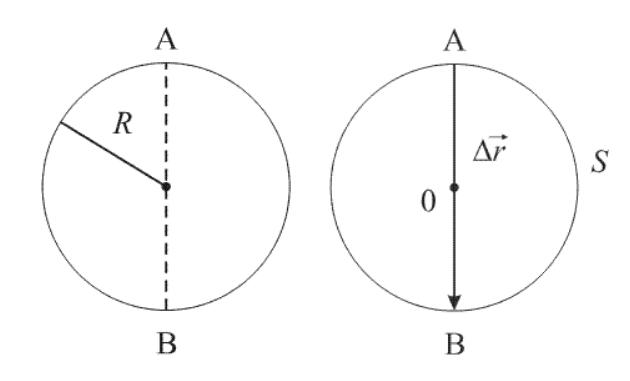
Во время движения из А в В точка проходит путь, который равен половине окружности, записываемой формулой:
Подставляем числовые значения и получаем:
S = 3 , 14 · 1 м = 3 , 14 м .
Перемещением ∆ r → в физике считается вектор, соединяющий начальное положение материальной точки с конечным, то есть А с В .
Траектория
Траектория (от позднелатинского trajectories – относящийся к перемещению) – это линия, по которой движется тело (материальная точка). Траектория движения может быть прямой (тело перемещается в одном направлении) и криволинейной, то есть механическое движение может быть прямолинейным и криволинейным.
Траектория прямолинейного движения в данной системе координат – это прямая линия. Например, можно считать, что траектория движения автомобиля по ровной дороге без поворотов является прямолинейной.
Криволинейное движение – это движение тел по окружности, эллипсу, параболе или гиперболе. Пример криволинейного движения – движение точки на колесе движущегося автомобиля или движение автомобиля в повороте.
Движение может быть сложным. Например, траектория движения тела в начале пути может быть прямолинейной, затем криволинейной. Например, автомобиль в начале пути движется по прямой дороге, а затем дорога начинает «петлять» и автомобиль начинает криволинейное движение.
Путь – это длина траектории. Путь является скалярной величиной и в международной системе единиц СИ измеряется в метрах (м). Расчёт пути выполняется во многих задачах по физике. Некоторые примеры будут рассмотрены далее в этом учебнике.
Вектор перемещения
Вектор перемещения (или просто перемещение) – это направленный отрезок прямой, соединяющий начальное положение тела с его последующим положением (рис. 1.1). Перемещение – величина векторная. Вектор перемещения направлен от начальной точки движения к конечной.
Модуль вектора перемещения (то есть длина отрезка, который соединяет начальную и конечную точки движения) может быть равен пройденному пути или быть меньше пройденного пути. Но никогда модуль вектора перемещения не может быть больше пройденного пути.
Модуль вектора перемещения равен пройденному пути, когда путь совпадает с траекторией (см. разделы Траектория и Путь), например, если из точки А в точку Б автомобиль перемещается по прямой дороге. Модуль вектора перемещения меньше пройденного пути, когда материальная точка движется по криволинейной траектории (рис. 1.1).
Рис. 1.1. Вектор перемещения и пройденный путь.
Ещё пример. Если автомобиль проедет по кругу один раз, то получится, что точка начала движения совпадёт с точкой конца движения и тогда вектор перемещения будет равен нулю, а пройденный путь будет равен длине окружности. Таким образом, путь и перемещение – это два разных понятия.
Правило сложения векторов
Векторы перемещений складываются геометрически по правилу сложения векторов (правило треугольника или правило параллелограмма, см. рис. 1.2).
Рис. 1.2. Сложение векторов перемещений.
На рис 1.2 показаны правила сложения векторов S1 и S2:
а) Сложение по правилу треугольника
б) Сложение по правилу параллелограмма
Проекции вектора перемещения
При решении задач по физике часто используют проекции вектора перемещения на координатные оси. Проекции вектора перемещения на координатные оси могут быть выражены через разности координат его конца и начала. Например, если материальная точка переместилась из точки А в точку В, то при этом вектор перемещения (рис. 1.3).
Выберем ось ОХ так, чтобы вектор лежал с этой осью в одной плоскости. Опустим перпендикуляры из точек А и В (из начальной и конечной точек вектора перемещения) до пересечения с осью ОХ. Таким образом мы получим проекции точек А и В на ось Х. Обозначим проекции точек А и В соответственно Аx и Вx. Длина отрезка АxВx на оси ОХ – это и есть проекция вектора перемещения на ось ОХ, то есть
Рис. 1.3. Проекция вектора перемещения.
Проекция вектора перемещения на ось ОХ равна разности координат конца и начала вектора, то есть Аналогично определяются и записываются проекции вектора перемещения на оси OY и OZ:
Здесь x0, y0, z0 — начальные координаты, или координаты начального положения тела (материальной точки); x, y, z — конечные координаты, или координаты последующего положения тела (материальной точки).
Проекция вектора перемещения считается положительной, если направление вектора и направление координатной оси совпадают (как на рис 1.3). Если направление вектора и направление координатной оси не совпадают (противоположны), то проекция вектора отрицательна (рис. 1.4).
Если вектор перемещения параллелен оси, то модуль его проекции равен модулю самого Вектора. Если вектор перемещения перпендикулярен оси, то модуль его проекции равен нулю (рис. 1.4).
Рис. 1.4. Модули проекции вектора перемещения.
Разность между последующим и начальным значениями какой-нибудь величины называется изменением этой величины. То есть проекция вектора перемещения на координатную ось равна изменению соответствующей координаты. Например, для случая, когда тело перемещается перпендикулярно оси Х (рис. 1.4) получается, что относительно оси Х тело НЕ ПЕРЕМЕЩАЕТСЯ. То есть перемещение тела по оси Х равно нулю.
Рассмотрим пример движения тела на плоскости. Начальное положение тела – точка А с координатами х0 и у0, то есть А(х0, у0). Конечное положение тела – точка В с координатами х и у, то есть В(х, у). Найдём модуль перемещения тела.
Из точек А и В опустим перпендикуляры на оси координат ОХ и OY (рис. 1.5).
Рис. 1.5. Движение тела на плоскости.
Определим проекции вектора перемещения на осях ОХ и OY:
На рис. 1.5 видно, что треугольник АВС – прямоугольный. Из этого следует, что при решении задачи может использоваться теорема Пифагора, с помощью которой можно найти модуль вектора перемещения, так как
По теореме Пифагора
Откуда можно найти модуль вектора перемещения, то есть длину пути тела из точки А в точку В:
Ну и напоследок предлагаю вам закрепить полученные знания и рассчитать несколько примеров на ваше усмотрение. Для этого введите какие-либо цифры в поля координат и нажмите кнопку РАССЧИТАТЬ. Ваш браузер должен поддерживать выполнение сценариев (скриптов) JavaScript и выполнение сценариев должно быть разрешено в настройках вашего браузера, иначе расчет не будет выполнен. В вещественных числах целая и дробная части должны разделяться точкой, например, 10.5.
Механическое движение и его характеристики
теория по физике 🧲 кинематика
Механика — раздел физики, который изучает механическое движение физических тел и взаимодействие между ними.
Основная задача механики — определение положение тела в пространстве в любой момент времени.
Механическое движение — изменение положения тела в пространстве относительно других тел с течением времени.
Механическое движение и его виды
По характеру движения точек тела выделяют три вида механического движения:
- Поступательное. Это движение, при котором все точки тела движутся одинаково. Если через тело мысленно провести прямую, то после изменения положения этого тела в пространстве данная прямая останется параллельной самой себе.
- Вращательное. Это движение, при котором все точки тела движутся, описывая окружности.
- Колебательное. Это движение тела, которое повторяется точно или приблизительно через определенные интервалы времени. От вращательного движения его отличает то, что при колебаниях тело перемещается в двух взаимно противоположных направлениях.
По типу линии, вдоль которой движется тело, выделяют два вида движения:
- Прямолинейное — тело движется по прямой линии.
- Криволинейное — тело движется по кривой линии, в том числе замкнутой.
По скорости выделяют два вида движения:
- Равномерное — скорость движущегося тела остается неизменной.
- Неравномерное — скорость движущегося тела с течением времени меняется.
По ускорению выделяют три вида движения:
- Равноускоренное — тело движется неравномерно с постоянным ускорением (положительным). Скорость увеличивается.
- Равнозамедленное — тело движется неравномерно с постоянным замедлением (отрицательным ускорением). Скорость уменьшается.
- Ускоренное — тело движется неравномерно с меняющимся ускорением. Скорость может, как увеличиваться, так и уменьшаться.
Что нужно для описания механического движения?
Для описания механического движения нужно выбрать, относительно какого тела оно будет рассматриваться. Движение одного и того же объекта относительно разных тел неодинаковое. К примеру, идущий человек относительно дерева движется с некоторой скоростью. Но относительно сумки, которую он держит в руках, он находится в состоянии покоя, так как расстояние между ними с течением времени не изменяется.
Решение основной задачи механики — определения положения тела в пространстве в любой момент времени — заключается в вычислении координат его точек. Чтобы вычислить координаты тела, нужно ввести систему координат и связать с ней тело отсчета. Также понадобится прибор для измерения времени. Все это вместе составляет систему отсчета.
Система отсчета — совокупность тела отсчета и связанных с ним системы координат и часов.
Тело отсчета — тело, относительно которого рассматривается движение.
Часы — прибор для отсчета времени. Время измеряется в секундах (с).
При описании движения тела важно учитывать его размеры, так как характер движения его отдельных точек может различаться. Но в рамках некоторых задач размер тела не влияет на результат решения. Тогда его можно считать пренебрежительно малым. Тогда тело рассматривают как движущуюся материальную точку.
Материальная точка — это тело, размерами которого можно пренебречь в условиях конкретной задачи. Допустимо принимать тело за точку, если оно движется поступательно или его размеры намного меньше расстояний, которые оно проходит.
Виды систем координат
В зависимости от характера движения тела для его описания выбирают одну из трех систем координат:
- Одномерную. Используется, когда положение материальной точки можно задать только одной координатой x — M(x) . В этом случае тело движется прямолинейно.
- Двумерную. Используется, когда положение материальной точки можно задать двумя координатами x и y — M(x,y). Тело в этом случае движения по плоскости.
- Трехмерную. Используется, когда положение материальной точки можно задать тремя координатами x, y и z — M(x,y,z). Тело в этом случае изменяет положение в трехмерном пространстве.

Способы описания механического движения
Описать механическое движение можно двумя способами:
Координатный способ

Указать положение материальной точки в пространстве можно, используя трехмерную систему координат. Если эта точка движется, то ее координаты с течением времени меняются. Так как координаты точки зависят от времени, можно считать, что они являются функциями времени. Математически это записывается так:

Эти уравнения называют кинематическими уравнениями движения точки, записанными в координатной форме.
Векторный способ
Радиус-вектор точки — вектор, начало которого совпадает с началом системы координат, а конец — с положением этой точки.

Указать положение точки в трехмерном пространстве также можно с помощью радиус-вектора. При движении точки радиус-вектор со временем изменяется. Он может менять направление и длину. Это значит, что радиус-вектор тоже можно принять за функцию времени. Математически это записывается так:
Эта формула называется кинематическим уравнением движения точки, записанным в векторной форме.
Характеристики механического движения
Движение материальной точки характеризуют три физические величины:
Перемещение
Перемещение (вектор перемещения) — направленный отрезок, начало которого совпадает с начальным положением точки, а конец — с его конечным положением. Обозначается как S .
Перемещение точки определяется как изменение радиус-вектора. Это изменение обозначается как Δ r . С точки зрения геометрии вектор перемещения равен разности радиус-векторов, задающих конечное и начальное положение точки:


Траектория — линия, которую описывает тело во время движения.
Путь — длина траектории. Обозначается буквой s. Единица измерения — метры (м).
Путь есть функция времени:
Модуль перемещения — длина вектора перемещения. Обозначается как |Δ r |. Единица измерения — метры (м).
Модуль перемещения необязательно должен совпадать с длиной пути.
Пример №1. Человек обошел круглое поле диаметром 1 км. Чему равны пройденный путь и перемещение, которое он совершил.
Путь равен длине окружности. Поэтому:

Человек, обойдя круглое поле, вернулся в ту же точку. Поэтому его начальное положение совпадает с конечным. В этом случае человек совершил перемещение, равное нулю.
Пример №2. Точка движется по окружности радиусом 10 м. Чему равен путь, пройденный этой точкой, в момент, когда модуль перемещения равен диаметру окружности?
Диаметр — это отрезок, который соединяет две точки окружности и проходит через центр. Перемещение равно длине этого отрезка в случае, если один из концов этого отрезка является началом вектора перемещения, а другой — его концом. Траекторией движения в этом случае является дуга, равная половине окружности. А длина траектории есть путь:

Скорость
Скорость — векторная физическая величина, характеризующая быстроту перемещения тела. Численно она равна отношению перемещения за малый промежуток времени к величине этого промежутка.
В физике скорость обозначается V . Математически скорость определяется формулой:

Скорость характеризуется не только направлением вектора скорости, но и его модулем.
Модуль скорости — расстояние, пройденное точкой за единицу времени. Обозначается буквой V и измеряется в метрах в секунду (м/с).
Математическое определение модуля скорости:
Величина скорости тела в данный момент времени есть первая производная от пройденного пути по времени:
Ускорение
Ускорение — векторная физическая величина, которая характеризует быстроту изменения скорости тела. Численно она равна отношению изменения скорости за малый промежуток времени к величине этого промежутка.
В физике ускорение обозначается a . Математически оно определяется формулой:

Модуль ускорения — численное изменение скорости в единицу времени. Обозначается буквой a. Единица измерения — метры в секунду в квадрате (м/с 2 ).
Математическое определение модуля скорости:
 v — скорость тела в данный момент времени, v0— его скорость в начальный момент времени, t — время, в течение которого эта скорость менялась.
v — скорость тела в данный момент времени, v0— его скорость в начальный момент времени, t — время, в течение которого эта скорость менялась.
Ускорение тела есть первая производная от скорости или вторая производная от пройденного пути по времени:

Проекция вектора перемещения на ось координат
Проекция вектора перемещения на ось — это скалярная величина, численно равная разности конечной и начальной координат.

Проекция вектора на ось OX:

Проекция вектора на ось OY:

Знаки проекций перемещения
- Проекция является положительной, если движение от начала проекции вектора к проекции конца происходит сонаправленно оси координат.
- Проекция является отрицательной, если движение от начала проекции вектора к проекции конца направлено в сторону, противоположную направлению координатной оси.
Внимание!
Проекция вектора перемещения на ось считается нулевой, если вектор расположен перпендикулярно этой оси.
Модуль перемещения — длина вектора перемещения:
Модуль перемещения измеряется в метрах (м).
Вместе с собственными проекциями модуль перемещения образует прямоугольный треугольник. Сам он является гипотенузой этого треугольника. Поэтому для его вычисления можно применить теорему Пифагора. Выглядит это так:
Выразив проекции вектора перемещения через координаты, эта формула примет вид:

Выражение проекций вектора перемещения через угол его наклона по отношению к координатным осям:
Общий вид уравнений координат:
Пример №3. Определить проекции вектора перемещения на ось OX, OY и вычислить его модуль.

Определяем координаты начальной точки вектора:

Определяем координаты конечной точки вектора:
Проекция вектора перемещения на ось OX:

Проекция вектора перемещения на ось OY:

Применяем формулу для вычисления модуля вектора перемещения:

Пример №4. Определить координаты конечной точки B вектора перемещения, если начальная точка A имеет координаты (–5;5). Учесть, что проекция перемещения на OX равна 10, а проекция перемещения на OY равна 5.
Извлекаем известные данные:

Для определения координаты точки В понадобятся формулы:

Выразим из них координаты конечного положения точки:

Точка В имеет координаты (5; 10).
Алгоритм решения
- Записать исходные данные в определенной системе отсчета.
- Записать формулу ускорения.
- Выразить из формулы ускорения скорость.
- Найти искомую величину.
Решение
Записываем исходные данные:
- Тело начинает двигаться из состояния покоя. Поэтому его начальная скорость v0 = 0 м/с.
- Ускорение, с которым тело начинает движение, равно: a = 4 м/с 2 .
- Время движения согласно условию задачи равно: t = 2 c.
Записываем формулу ускорения:

Так как начальная скорость равна 0, эта формула принимает
Вид — группа особей, сходных по морфолого-анатомическим, физиолого-экологическим, биохимическим и генетическим признакам, занимающих естественный ареал, способных свободно скрещиваться между собой и давать плодовитое потомство.

Отсюда скорость равна:
Подставляем имеющиеся данные и вычисляем:
pазбирался: Алиса Никитина | обсудить разбор | оценить
http://www.av-physics.narod.ru/mechanics/trajectory.htm