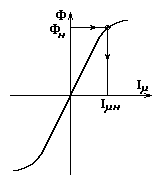
Определение момента инерции
Момент
инерции J (кгм2) – параметр, аналогичный
по физическому смыслу массе при
поступательном движении. Он характеризует
меру инерции тел, вращающихся относительно
фиксированной оси вращения. Момент
инерции материальной точки с массой m
равен произведению массы на квадрат
расстояния от точки до оси вращения:
![]() .
.
Момент
инерции тела есть сумма моментов инерции
материальных точек, составляющих это
тело. Он может быть выражен через массу
тела и его размеры[1].
Моменты
инерции однородных тел простых форм
приведены в табл. 2.1.
Таблица
2.1
Моменты
инерции некоторых однородных тел
|
Диск |
|
|
|
Момент |
|
|
|
Момент |
|
|
|
Момент |
|
|





Момент
инерции тела, если известно распределение
массы тела относительно оси вращения
mi (R), может быть определён как
 .
.
(2.11)
Детали
электропривода, например ротор
электрической машины, представляют
собой конструкции, состоящие из деталей
сложных форм и изготовленные из материалов
различной плотности. Следовательно,
расчёт момента инерции связан со
значительными трудностями.
В
случаях, когда расчёт момента инерции
не возможен либо затруднён, используют
следующие методы экспериментального
определения момента инерции.
Метод
свободного выбега (самоторможения)[2].
Сущность этого метода состоит в следующем.
Исследуемый агрегат, включающий в себя
электродвигатель и механически
соединённые с ним элементы, разгоняется
до некоторой установившейся частоты
вращения в режиме х.х.![]() .
.
После этого электродвигатель отключают
от сети и наступает процесс самопроизвольного
торможения, т.е. торможения исключительно
за счёт внутренних сил трения в подшипниках
электродвигателя и сочленённых с ним
вращающих частей о воздух. На преодоление
этих сил трения затрачивается кинетическая
энергия (Дж), запасенная во вращающихся
частях агрегата:
 .
.
(2.12)
С
другой стороны, эта энергия может быть
определена как произведение мощности,
затраченной на приведение во вращение
агрегата в режиме х.х.
![]() на
на
время![]() :
:
![]() .
.
(2.13)
Приравняв
(9.1) к (9.2), получим выражение общего
момента инерции, кг·м2:
 .
.
(2.14)
Значения
![]() и
и![]() определяют
определяют
экспериментально, выполнив опыт х.х. и
опыт свободного выбега, по кривой выбега:![]() .
.
Метод
вспомогательного маятника. Этот метод
применяют в тех случаях, когда метод
свободного выбега не может быть
использован, в частности для электрических
машин большой мощности – до 1000 кВт.
Для
реализации этого метода вращающуюся
часть машины устанавливают на подшипниках
балансировочного станка. Если вращающаяся
часть машины имеет собственные подшипники,
то могут быть использованы и они.
Испытания проводят на собственной
машине. У коллекторных машин или
асинхронных двигателей с фазным ротором
при определении момента инерции следует
поднять щётки.
При
использовании метода вспомогательного
маятника к валу исследуемой вращающейся
части прикрепляют дополнительную массу
mдоп центр тяжести которой находится
на расстоянии а от центра вала.
Вращающуюся
часть вместе со вспомогательным маятником
следует привести в колебательное
движение. При этом одностороннее угловое
отклонение не должно превышать 15о.
Период колебаний принимают как средний
из нескольких колебаний. Для точности
рекомендуется производить измерения
периода колебаний в момент нахождения
маятника через положение статического
равновесия.
Момент
инерции испытуемой вращающейся части
определяется по формуле
 .
.
(2.15)
Для
повышения точности измерения момента
инерции рекомендуется проводить
измерения несколько раз с разными
значениями дополнительной массы
вспомогательного маятника mдоп или
расстояния а.[3]
10.Приведення
моментів інерції і сил опору.
-
Приведення
моментів опору і моментів інерції при
обертальному
русі
Зазвичай
двигун приводить в дію робочий механізм
через систему передач (рисунок 2.1).
Приведення
моментів опору до вісі обертання
електродвигуна виконується на основі
енергетичного балансу всієї системи.
При цьому статичний момент опору,
приведений до валу двигуна
 ,
,
де  – статичний момент опору робочого
– статичний момент опору робочого
механізму;
 – швидкість обертання валу робочого
– швидкість обертання валу робочого
механізму;
 – швидкість обертання валу двигуна;
– швидкість обертання валу двигуна;
 – коефіцієнт корисної дії передачі
– коефіцієнт корисної дії передачі
(редуктора).
Приведення
моментів інерції до однієї вісі обертання
спирається на те, що величина сумарного
запасу кінетичної енергії частин
приводу, що рухаються, віднесена до
однієї вісі, залишається незмінною. При
наявності обертових частин, що мають
моменти інерції
 і кутові швидкості
і кутові швидкості ,
,
можна замінити їх динамічну дію дією
одного моменту інерції, приведеного до
швидкості обертання валу двигуна, тобто
 .
.
Зазвичай
в робочих механізмах використовуються
редуктори, в яких частини, що рухаються,
мають форму порожнього циліндру,
зрізаного конусу і прямолінійного
тонкого стрижня (вал). Моменти інерції
цих тіл визначаються наступними виразами.
Для
довгого тонкого валу відносно його вісі
обертання
 ,
,
де m –
маса валу;
l –
довжина валу.
Для
порожнього циліндра відносно його вісі
обертання
 ,
,
де R1,
R2 – зовнішній і внутрішній радіуси
циліндру.
Для
зрізаного прямого конусу відносно його
вісі обертання
 ,
,
де R1,
R2 – радіуси основ конусу.
Для
суцільного циліндру
 .
.
Приведення
сили і маси при поступальному русі до
моменту при обертальному русі
Необхідність
приведення поступального руху до
обертального виникає, наприклад, у
підйомниках, кранах, стругальних
верстатах і т.п.
Приведений
до швидкості обертання валу двигуна
підйомника (рисунок 2.2) момент опору
 ,
,
де Fс.м
– сила опору робочого механізму,
обумовлена силою ваги вантажу G, який
рухається поступально;
V –
швидкість поступального руху вантажу.
Момент
інерції, приведений до валу двигуна,
 .
.

Якщо
механізм має елементи, які рухаються
обертально і поступально, то сумарний
приведений до валу двигуна момент
інерції
 .
.
11.Система
рівнянь двигуна незалежного збудження
(ДНЗ) для природного ввімкнення.
Для
получения простейшей модели электропривода
постоянного тока, описывающей
установившиеся (статические) режимы и
позволяющей получить основные
характеристики, воспользуемся схемой
на рис. 1.
Будем
полагать, что якорная цепь питается от
независимого источника с напряжением
U* , сопротивление цепи якоря R постоянно,
магнитный поток Ф определяется лишь
током возбуждения и не зависит от
нагрузки (реакция якоря не проявляется),
индуктивные параметры цепей пока не
учитываются, поскольку рассматриваются
лишь установившиеся (статические)
режимы.

Рис.
1. Схема электропривода с двигателем
постоянного тока
Взаимодействие
тока I в обмотке якоря с магнитным потоком
Ф, создаваемым обмотками, расположенными
на полюсах машины, приводит в соответствии
с законом Ампера и возникновению
электромагнитных сил, действующих на
активные проводники обмотки и,
следовательно, электромагнитного
момента М:
М
= kФI
(1)
где
k- конструктивный параметр машины.
В
движущихся с угловой скоростью
![]() в
в
магнитном поле под действием момента
М проводниках обмотки якоря в соответствии
с законом Фарадея наводится ЭДС вращения
Е:
E
= kФw ,
(2)
направленная
в рассматриваемом случае встречно по
отношению к вызвавшей движение причине
— ЭДС источника питания U.
В
соответствие со вторым законом Кирхгоффа
для якорной цепи машины справедливо
уравнение:
U-E
= IR.
(3)
Уравнения
(1)-(3) — простейшая, но достаточная для
понимания главных процессов в
электроприводе постоянного тока модель.
Для решения практических задач они
должны быть дополнены уравнением
движения с моментом потерь
![]() ,
,
входящим в Мс,
![]()
и
уравнениями цепи возбуждения для
конкретной схемы электропривода.
Разумеется,
в условиях каждой задачи должно быть
строго оговорено, что задано и известно,
а что нужно искать.
Рассмотрим
подробнее роль, которую играет ЭДС Е в
процессе преобразования энергии,
осуществляемом электрической машиной.
Если существовал некоторый установившийся
режим М1 = Мс1, а затем Мс изменился,
например, возрос до величины Мс2, то для
получения нового установившегося режима
необходимо иметь средство, которое
изменило бы М, приведя его в соответствие
с новым значением Мс. В двигателе
внутреннего сгорания эту роль выполнит
оператор, увеличив подачу топлива; в
паровой турбине — специальный регулятор,
который увеличит подачу пара. В
электрической машине эту роль выполнит
ЭДС. Действительно, при возрастании Мс
скорость двигателя начнет снижаться,
значит уменьшится в соответствии с (2)
и ЭДС (полагаем для простоты, что Ф, а
также U и R — постоянные). Из (3) следует,
что
![]() ,
,
следовательно,
ток вырастет, обусловив тем самым рост
момента в соответствии с (1). Двигатель
автоматически, без каких-либо внешних
воздействий перейдет в новое установившееся
состояние. Эти процессы будут иметь
место при любых величинах и знаках Мс,
то есть ЭДС будет выполнять функцию
регулятора как в двигательном, так и в
тормозных режимах работы машины.
12.Природні
механічні характеристики ДНЗ.
Двигатели
независимого и параллельного возбуждения.
Схема включения двигателя независимого
возбуждения показана на рис.
5.19.

Рис.
5.19.
В
цепь якоря может быть включено добавочное
сопротивление Rд, например пусковой
реостат. Для регулирования тока
возбуждения в цепь обмотки возбуждения
может быть включен регулировочный
реостат Rр. У двигателя параллельного
возбуждения обмотки якоря и возбуждения
подключены к одному источнику питания,
и напряжение на них одинаковое.
Следовательно, двигатель параллельного
возбуждения можно рассматривать как
двигатель независимого возбуждения
при Uя= Uв.
Механические
характеристики.
Механические
характеристики двигателей принято
подразделять на естественные и
искусственные. Естественная характеристика
соответствует номинальному напряжению
питания и отсутствию добавочных
сопротивлений в цепях обмоток двигателя.
Если хотя бы одно из перечисленных
условий не выполняется, характеристика
называется искусственной.
Уравнения
электромеханической ω=f(I я) и механической
ω=f(M эм.) характеристик могут быть найдены
из уравнения равновесия ЭДС и напряжений
для якорной цепи двигателя, записанного
на основании второго закона Кирхгофа:
U
я=E я+I я)(R я+R д), (5.35)
где
R я – активное сопротивление
якоря.
Преобразуя (5.35) с
учетом (5.6), получим уравнение
электромеханической характеристики
ω=(U
я-I я(R я+R д))/kФ. (5.36)
В
соответствии с (5.10) ток якоря I я=M эм./kФ
и выражение (5.36) преобразуется в уравнение
механической характеристики:
ω=Uя/
kФ – ( R я+ R д)/( kФ) 2)Mэм. . (5.37)
Это
уравнение можно представить в виде ω=
ω о.ид.- Δ ω, где
ω
о.ид.=Uя/kФ (5.38)
ω
о.ид — угловая скорость идеального
холостого хода ( при Iя=0 и, соответственно,
Мэм.=0 ); Δ ω= Мэм. [(Rя+Rд)/(kФ)2]– уменьшение
угловой скорости, обусловленное нагрузкой
на валу двигателя и пропорциональное
сопротивлению якорной цепи.
Семейство
механических характеристик при
номинальном напряжении на якоре и потоке
возбуждения и различных добавочных
сопротивлениях в цепи якоря изображено
на рис.
5.20,а.

Рис.5.20
Механические
характеристики двигателей принято
оценивать по трем показателям:
устойчивости, жесткости и
линейности.
Естественная
механическая характеристика,
соответствующая (5.37) при Rд=0, изображена
прямой линией 1. Механическая характеристика
линейная; отклонение от линейного закона
может быть вызвано реакцией якоря,
приводящей к изменению потока Ф. Эта
характеристика жесткая, так как при
изменении момента нагрузки и соответственно
скорости поток возбуждения не изменяется.
Жесткость характеристики уменьшается
при введении добавочного сопротивления
в цепь якоря (прямые линии 2 и 3 –
искусственные реостатные характеристики).
Характеристики устойчивые, так как
dω/dMэм.<0, и обеспечивают саморегулирование
двигателя, т.е. он автоматически
приспосабливается к изменяющейся
нагрузке. Увеличение статического
момента сопротивления на валу двигателя
приводит к уменьшению угловой скорости
и ЭДС якоря. Ток якоря, выражение для
которого можно записать на основании
(5.35),
Iя=
(Uя-Eя)/(R я+ R д)=(Uя -kωФ;)/( R я R д ),
(5.39)
возрастает.
Соответственно растет электромагнитный
момент вплоть до нового значения момента
сопротивления (переход из точки А в
точку В на механической характеристике).
По
аналогии на основании (5.37) может быть
построено семейство искусственных
характеристик при различных значениях
Uя или Ф. Анализ таких характеристик
будет проделан в разделе исполнительных
двигателей постоянного тока (§ 5.7).
13.Штучні
характеристики ДНЗ.
Механические
характеристики двигателей принято
подразделять на естественные и
искусственные.Механическая характеристика
двигателя это зависимость электромагнитного
момента, развиваемого двигателем, от
угловой скорости ротора. Механические
характеристики двигателей принято
подразделять на естественные и
искусственные. Естественная характеристика
соответствует номинальному напряжению
питания и отсутствию добавочных
сопротивлений в цепях обмоток двигателя.
Если хотя бы одно из перечисленных
условий не выполняется, характеристика
называется искусственной.
14.Статичні
режими роботи ДНЗ.
15.Переваги
ДНЗ перед двигунами послідовного
збудження.
16.Переваги
асинхронних (АД) двигунів перед
колекторними.
Преимущество
асинхронных двигателей перед коллекторными
— они не имеют коллектора, следовательно,
в асинхронном двигателе меньше потерь
на трение.
17.Схема
заміщення (АД)
Асинхронними
двигунами називаються такі двигуни
змінного струму, в яких швидкість
обертання ротора n при даній частоті
струму в мережі змінюється зі зміненням
навантаження.
Асинхронні
двигуни бувають трифазні, двофазні та
однофазні. Найбільш широке застосування
в РЛС та АСУ одержали трифазні та двофазні
асинхронні двигуни. Вони застосовуються
для обертання антени, вентиляторів, у
системах слідкування тощо.
Асинхронні
двигуни, як і інші електромашини,
зворотні, тобто можуть працювати в
режимі генератора. Але асинхронні
генератори застосовуються порівняно
рідко, оскільки вони значно поступаються
синхронним генераторам за своїми
“характеристиками”.
СХЕМА
ЗАМІЩЕННЯ АСИНХРОННОГО ДВИГУНА

Рис.
3. Схема замещения фазы асинхронного
двигателя
Принцип
действия асинхронной машины в самом
общем виде состоит в следующем: один из
элементов машины — статор используется
для создания движущегося с определенной
скоростью магнитного поля, а в замкнутых
проводящих пассивных контурах другого
элемента — ротора наводятся ЭДС, вызывающие
протекание токов и образование сил
(моментов) при их взаимодействии с
магнитным полем. Все эти явления имеют
место при несинхронном — асинхронном
движении ротора относительно поля, что
и дало машинам такого типа название —
асинхронные.
Статор
обычно выполнен в виде нескольких
расположенных в пазах катушек, а ротор
— в виде “беличьей клетки” (короткозамкнутый
ротор) или в виде нескольких катушек
(фазный ротор), которые соединены между
собой, выведены на кольца, расположенные
на валу, и с помощью скользящих по ним
щеток могут быть замкнуты на внешние
резисторы.
Несмотря
на простоту физических явлений и
материализующих их конструктивов полное
математическое описание процессов в
асинхронной машине весьма сложно:
во-первых,
все напряжения, токи, потокосцепления
— переменные, т.е. характеризуются
частотой, амплитудой, фазой или
соответствующими векторными величинами;
во-вторых,
взаимодействуют движущиеся контуры,
взаимное расположение которых изменяется
в пространстве;
в-третьих,
магнитный поток нелинейно связан с
намагничивающим током (проявляется
насыщение магнитной цепи), активные
сопротивления роторной цепи зависят
от частоты (эффект вытеснения тока),
сопротивления всех цепей зависят от
температуры и т.п.
Рассмотрим
самую простую модель асинхронной машины,
пригодную для объяснения основных
явлений в асинхронном электроприводе.
Принцип
получения движущегося магнитного
поля
Пусть
на статоре расположен виток (катушка)
А-Х (рис. 1,а,б), по которому протекает
переменный ток iA = Imsinw t; w = 2p f1. МДС FА,
созданная этим током, будет пульсировать
по оси витка
FА
= Fmsinw t
|
а)
б)
в) |
г) |




Рис.
1. К образованию
вращающегося
магнитного поля в машине
(горизонтальные
штриховые стрелки на рис. 1,в). Если
добавить виток (катушку) В-Y, расположенный
под углом 900 к А-Х, и пропускать по нему
ток iB = Imcosw t, то МДС FВ будет пульсировать
по оси этого витка
(вертикальные
стрелки):
FВ
= Fmcosw t.
Вектор
результирующей
МДС имеет модуль
![]()
Его
фаза a определится из условия
 .
.
Таким
образом, вектор результирующей МДС при
принятых условиях, т.е. при сдвиге двух
витков в пространстве в
![]() и
и
при сдвиге токов во времени на![]() ,
,
вращается с угловой скоростью![]() ,
,
где f1 — частота токов в витках.
В
общем случае для машины, имеющей р пар
полюсов (р=1,2,3…), синхронная угловая
скорость
![]() ,
,
рад/с, т.е. скорость поля, определится
как
 ;
;
(1)
для
частоты вращения n0, об/мин, будем иметь:
 ,
,
(2)
т.е.
при питании от сети f1=50Гц синхронная
частота вращения может быть 3000, 1500, 1000,
750, 600… об/мин в зависимости от конструкции
машины.
Выражения
(1) и (2) имеют принципиальный характер:
они показывают, что для данной машины
имеется лишь одна возможность изменять
скорость поля — изменять частоту источника
питания f1.
Процессы
при w = w 0
Пусть
ротор вращается со скоростью w 0, т.е. его
обмотки не пересекают силовых линий
магнитного поля и он не оказывает
существенного влияния на процессы.
В
весьма грубом, но иногда полезном
приближении можно представить обмотку
фазы статора как некоторую идеальную
катушку, к которой приложено переменное
напряжение
![]() .
.
Мы будем дальше либо обозначать его и
другие синусоидально изменяющиеся
переменные соответствующими заглавными
буквами, если интерес представляют лишь
их действующие значения, либо будем
добавлять точку вверху, показывая тем
самым, что речь идет о временнo м векторе,
имеющем амплитуду![]() и
и
фазу j .
Очевидно,
что приложенное напряжение
![]() уравновесится
уравновесится
ЭДС самоиндукции![]() (рис.
(рис.
2,а,б)
![]() ,
,
(3)
где
w — число витков обмотки; kоб — коэффициент,
зависящий от конкретного выполнения
обмотки.

а)
б) в)
Рис.
2. Идеализированная модель асинхронной
машины при w = w 0 (а), векторная диаграмма
(б) и кривая намагничивания (в)
Можно
приближённо считать, что магнитный
поток определяется приложенным
напряжением, частотой и параметрами
обмотки:
 .
.
(4)
Ток
в обмотке (фазе) статора — ток намагничивания
определится при этом лишь магнитным
потоком и характеристикой намагничивания
машины (рис. 2,в):
![]()
В
серийных машинах при U1=U1н и f1=f1н, т.е. при
номинальном магнитном потоке ток
холостого хода I10 составляет обычно 30%
— 40% от номинального тока статора I1н.
Процессы
под нагрузкой
При
нагружении вала
![]() ;
;
отличие скоростей w и w 0 принято
характеризовать скольжением
 .
.
(5)
Теперь
в роторной цепи появится ЭДС![]() ,
,
наведенная по закону электромагнитной
индукции и равная
![]() =E1ў
=E1ў
s;
(6)
штрихом
здесь и далее отмечены приведенные
величины, учитывающие неодинаковость
обмоток статора и ротора. Частота
наведенной ЭДС составляет
f2=f1s
(7)
Ток
I2ў в роторной цепи, обладающей
сопротивлением R2ў и индуктивностью L2ў
, определится как

или
после простых преобразований
 ,
,
(8)
где
Х2ў — индуктивное сопротивление рассеяния
вторичной цепи при частоте f1.
Мы
получили уравнение, соответствующее
традиционной схеме замещения фазы
асинхронного двигателя — рис. 3, в которой
учтены и параметры статора R1 и Х1. Эта
простая модель пригодна для анализа
установившихся режимов при симметричном
двигателе с симметричным питанием.

Рис.
3. Схема замещения фазы асинхронного
двигателя
18.
Механічна характеристика АД.(есть в
Чиликине -74стр.)
Асинхронные
двигатели в силу ряда достоинств
(относительная дешевизна, высокие
энергетические показатели, простота
обслуживания) являются наиболее
распространенными среди всех электрических
машин. В количественном отношении
они составляют около 90 % всего парка
машин в народном хозяйстве, а по
установленной мощности – около 55 %.[1]
В
настоящее время самым распространённым
двигателем промышленных электроприводов
является трёхфазный асинхронный
двигатель с короткозамкнутым ротором.
Про него можно сказать, что он является
самым простым, самым надёжным и самым
дешёвым электродвигателем в широком
диапазоне частоты вращения и мощности.
Самым эффективным и самым распространённым
среди глубокорегулируемых асинхронных
электроприводов является частотно-регулируемый
электропривод на основе преобразователя
частоты с промежуточным звеном постоянного
тока.
Применение
частотно-регулируемого асинхронного
электропривода в механизмах
подъемно-транспортного оборудования
является эффективным методом повышения
технологичности производства.
Использование таких приводов позволяет:
1)
значительно (до 40 %) снизить энергопотребление
крана, что особенно актуально при
постоянно растущих тарифах на
энергоносители;
2)
осуществить разгон и торможение двигателя
плавно, по линейному закону от времени,
при варьировании временем разгона и
временем торможения от долей секунды
до 50 мин;
3)
повысить комфортные показатели при
движении крана и долговечность
механического оборудования благодаря
плавности переходных процессов;
4)
защитить двигатель от перегрузок по
току, перегрева, утечек на землю и от
обрывов в цепях питания двигателей;
5)
снизить эксплуатационные расходы на
капитальный ремонт оборудования за
счет значительного снижения динамических
нагрузок в элементах кинематической
цепи;
6)
изменять скорости и ускорения движения
механизмов крана применительно к
конкретным технологическим задачам.
Эффективность
и экономичность таких электроприводов
в значительной степени зависит от
правильности выбора номинальных
параметров их основных элементов, т.е.
двигателя и преобразователя частоты[2].
Принцип
действия асинхронной машины в самом
общем виде состоит в следующем: один из
элементов машины – статор используется
для создания движущегося с определенной
скоростью магнитного поля, а в замкнутых
проводящих пассивных контурах другого
элемента – ротора наводятся ЭДС,
вызывающие протекание токов и образование
сил (моменты) при их взаимодействии с
магнитным полем. Все эти явления имеют
место при несинхронном (асинхронном)
движении ротора относительно поля, что
и дало машинам такого типа название –
асинхронные[3][10].
Статор
обычно выполнен в виде нескольких,
расположенных в пазах, катушек, а ротор
– в виде «беличьей клетки» (короткозамкнутый
ротор) или в виде нескольких катушек
(фазный ротор), которые соединены между
собой, выведены на кольца, расположенные
на валу, и, с помощью скользящих по ним
щеток, могут быть замкнуты на внешние
резисторы.
Несмотря
на простоту физических явлений и
материализующих их конструктивов полное
математическое описание процессов в
асинхронной машине весьма сложно.
В
общем случае для машины, имеющей р пар
полюсов (р = 1,2,3…), синхронная угловая
скорость 0, рад/с, т.е. скорость поля,
определится как
 ;
;
(4.11)
для
частоты вращения n0, об/мин, будем иметь:
 ,
,
(4.12)
т.е.
при питании от сети f1 = 50 Гц синхронная
частота вращения может быть 3000, 1500, 1000,
750, 600… об/мин в зависимости от конструкции
машины (числа пар полюсов р).
Выражения
(4.11) и (4.12) имеют принципиальный характер:
они показывают, что для данной машины
имеется лишь одна возможность изменять
скорость поля – изменять частоту
источника питания f1.
При
нагружении вала 0 отличие скоростей
и 0 принято характеризовать
скольжением:
 ,
,
(4.13)
Асинхронный
электропривод, как и электропривод
постоянного тока, может работать в
двигательном и трёх тормозных режимах
с таким же, как в электроприводе
постоянного тока, распределением потоков
энергии (рис. 4.7).

Рис.
4.7. Механическая характеристика
асинхронной машины
Как
следует из рис. 4.7, по мере увеличении
момента сопротивления увеличивается
скольжение машины и развиваемый момент.
При некотором критическом значении
скольжения sКР, момент двигателя достигает
максимального (или критического) значения
– МКР. Жёсткость механической
характеристики асинхронных двигателей
переменна: на рабочем участке s = 0…sКР:
b < 0, а при ½s½>½sКР½ – положительна:
b < 0.
Специфическим
является режим динамического торможения,
которое представляет собою генераторный
режим отключенного от сети переменного
тока асинхронного двигателя, к статору
которого подведен постоянный ток Iп.
Этот режим применяется в ряде случаев,
когда после отключения двигателя от
сети требуется его быстрая остановка
без реверса.
Постоянный
ток, подводимый к обмотке статора,
образует неподвижное в пространстве
поле. При вращении ротора в его обмотке
наводится переменная эдс, под действием
которой протекает переменный ток. Этот
ток создает также неподвижное поле.
Складываясь,
поля статора и ротора образуют
результирующее поле, которое при
взаимодействии с током ротора создает
тормозной момент. Энергия, поступающая
с вала двигателя, рассеивается при этом
в сопротивлениях роторной цепи.
На
шильдике или в паспорте асинхронного
двигателя обычно указаны номинальные
линейные напряжения при соединении
обмоток в «звезду» и «треугольник»:
![]() ;
;
токи![]() ;
;
частота f1н; мощность на валу Рн; частота
вращения при номинальном моменте ωн
(nн); кпд – hн, cos jн.
Для
двигателей с короткозамкнутым ротором
в каталоге приводятся кратности пускового
тока:
 ;
;
пускового момента: ;
;
критического момента: .
.
Следует иметь в виду, что данных,
приводимых в каталоге, недостаточно,
чтобы определить по ним параметры схемы
замещения и пользоваться ей при всех
расчетах, однако по каталожным данным
можно построить естественную
электромеханическую и механическую
характеристики, воспользовавшись
уравнением приближённой механической
характеристики[4].
Приближенное
уравнение механической характеристики
асинхронного двигателя (формула Клосса)
удовлетворительно воспроизводит
механическую характеристику в области
малых скольжений (от s = 0 до s = sкр)[5].
 .
.
(4.14)
Необходимо
помнить, что на время разгона существенно
влияет вид механической характеристики
в области больших скольжений от s = 1 до
s = sкр, поэтому для определения моментов
при значениях скольжения, которое больше
критического, следует пользоваться
выражением
 ,
,
(4.15)
где
b – коэффициент, определяемый следующим
образом. Для пускового момента (s = l)
соотношение (4.14) приобретает следующий
вид:
 ,
,
|
|
Критическое
откуда
Значение которая приводится в справочниках Используя |

 .
.
Пример
построения механической характеристики
асинхронного электродвигателя обычного
исполнения с использованием соотношений
(4.14)–(4.17) приведен в подразд. 5.2 и прил.
1.
|
|
Двигатели Технические
Электромеханическую
При
В
Ток,
Ток
|

 .
.
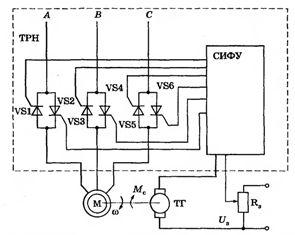
19.Регулювання
швидкості обертання АД.
Частота
вращения асинхронного двигателя
n
= n1 (1 – s) = (60f1/p) (1-s) (85)
Из
этого выражения видно, что ее можно
регулировать, изменяя частоту f1 питающего
напряжения, число пар полюсов р и
 Рис.
Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
скольжение
s. Последнее при заданных значениях
момента на валу Мвн и частоты f1 можно
изменять путем включения в цепь обмотки
ротора реостата.
Регулирование
путем изменения частоты питающего
напряжения. Этот способ требует наличия
преобразователя частоты, к которому
должен быть подключен асинхронный
двигатель. На основе управляемых
полупроводниковых вентилей (тиристоров)
созданы статические преобразователи
частоты и построен ряд опытных электровозов
и тепловозов с асинхронными двигателями,
частота вращения которых регулируется
путем изменения частоты питающего
напряжения. Такой способ регулирования
частоты вращения ротора асинхронного
двигателя является весьма перспективным.
Регулирование
путем изменения числа пар полюсов.
Этот способ позволяет получить ступенчатое
изменение частоты вращения. Для этой
цели отдельные катушки 1, 2 и 3, 4, составляющие
одну фазу (рис. 266), переключаются так,
чтобы изменялось соответствующим
образом направление тока в них (например,
с последовательного согласного соединения
на встречное). При согласном включении
катушек (рис. 266, а) число полюсов равно
четырем, при встречном включении (рис.
266, б) — двум. Катушки двух других фаз,
сдвинутые в пространстве на 120°,
соединяются таким же образом. Такое же
уменьшение числа полюсов можно осуществить
при переключении катушек с последовательного
на параллельное соединение. При изменении
числа полюсов изменяется частота
вращения n1
магнитного поля двигателя, а следовательно,
и частота вращения n его ротора. Если
нужно иметь три или четыре частоты
вращения n1,
то на статоре располагают еще одну
обмотку, при переключении которой можно
получить еще две частоты. Существуют
двигатели, которые обеспечивают изменение
частоты вращения n1
при постоянном наибольшем моменте или
при приблизительно постоянной мощности
(рис. 267).
В
асинхронном двигателе число полюсов
ротора должно быть равно числу полюсов
статора. В короткозамкнутом роторе это
условие выполняется автоматически и
при переключении обмотки статора никаких
изменений в обмотке ротора выполнять
не требуется.
 Рис.
Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
 Рис.
Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
 Рис.
Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
В
двигателе же с фазным ротором в этом
случае надо было бы изменять число
полюсов обмотки ротора, что сильно
усложнило бы его конструкцию, поэтому
такой способ регулирования частоты
вращения используется только в двигателях
с коротко-замкнутым ротором. Такие
двигатели имеют большие габаритные
размеры и массу по сравнению с двигателями
общего применения, а следовательно, и
большую стоимость. Кроме того, регулирование
осуществляется большими ступенями; при
частоте f1
= 50 Гц частота вращения поля n1
при переключениях изменяется в отношении
3000:1500:1000:750.
Регулирование
путем включения в цепь ротора реостата.
При включении в цепь обмотки ротора
реостата с различным сопротивлением
(Rп4,
RпЗ,
Rп2
и т. д.) получаем ряд реостатных механических
характеристик 4, 3 и 2 двигателя. При этом
некоторому нагрузочному моменту Мном
(рис. 268) будут соответствовать меньшие
частоты вращения n4,
n3,
n2
и т. д., чем частота nе
при работе двигателя на естественной
характеристике 1 (при Rп
= 0). Это способ регулирования может быть
использован только для двигателей с
фазным ротором. Он позволяет плавно
изменять частоту вращения в широких
пределах. Недостатками его являются
большие потери энергии в регулировочном
реостате, поэтому его используют только
при кратковременных режимах работы
двигателя (при пуске и пр.).
Изменение
направления вращения. Для
изменения направления вращения двигателя
нужно изменить направление вращения
магнитного поля, создаваемого обмотками
статора. Это достигается изменением
порядка чередования тока в фазах обмотки
статора. Например, если максимумы токов
поступают в фазы обмотки статора 1 (рис.
269, а) в следующем порядке: фаза А — фаза
В — фаза С, то ротор 2 двигателя будет
вращаться по часовой стрелке. Если же
подавать их в такой последовательности:
фаза В — фаза А — фаза С, то ротор начнет
вращаться против часовой стрелки. Для
этой цели необходимо изменить схему
соединения обмоток статора с сетью,
переключив две любые фазы (провода).
Например, зажим А обмотки статора,
который ранее был соединен с линейным
проводом Л1, нужно переключить на провод
Л2, а зажим В этой обмотки, соединенный
ранее с Л2, переключить на провод Л1 (рис.
269,б). Такое переключение можно осуществить
обычным переключателем.
ИЛИ
ВОТ ЭТОТ ВАРИАНТ
|
Регулирование |
|
Наиболее
Регулирование
Введение
Из
Жесткость
Регулирование
Изменение
При
Рис.
Рис.
Рис.
Если
Регулировать
Для
Рис.
Замкнутая
Регулирование
Так
Принцип
Этот
Для
Схема
Рис.
Рис.
С
Частотное
Большинство
Звено
Силовой
В
Регулирование
Ступенчатое
Из
Существует
Рис.
Регулирование
Использованы |







20.Механічні
характеристики
АД в гальмівних режимах.(Есть в
Чиликине-82стр.)
Асинхронный
двигатель может работать в следующих
тормозных режимах: в режиме рекуперативного
торможения, противовключения и
динамическом.
Рекуперативное
торможение асинхронного двигателя
Режим
рекуперативного торможения осуществляется
в том случае, когда скорость ротора
асинхронного двигателя превышает
синхронную.
Режим
рекуперативного торможения практически
применяется для двигателей с переключением
полюсов и в приводах грузоподъемных
машин (подъемники, экскаваторы и т.п.).
При
переходе в генераторный режим вследствие
изменения знака момента меняет знак
активная составляющая тока ротора. В
этом случае асинхронный
двигатель отдает активную
мощность (энергию) в сеть и потребляет
из сети реактивную мощность (энергию),
необходимую для возбуждения. Такой
режим возникает, например, при торможении
(переходе) двухскоростного двигателя
с высокой на низкую скорость, как показано
на рис. 1 а.

Рис.
1. Торможение асинхронного двигателя в
основной схеме включения: а) с рекуперацией
энергии в сеть; б) противовключением
Предположим,
что в исходном положении двигатель
работал на характеристике 1 и в точке
а, вращаясь со скоростью ωуст1. При
увеличении числа пар полюсов двигатель
переходит на характеристику 2, участок
бс которой соответствует торможению с
рекуперацией энергии в сеть.
Этот
же вид торможения может быть реализован
в системе преобразователь
частоты – двигатель при
останове асинхронного двигателя или
при переходе с характеристики на
характеристику. Для этого осуществляется
уменьшение частоты выходного напряжения,
а тем самым синхронной скорости ωо = 2πf
/ p.
В
силу механической инерции текущая
скорость двигателя ω будет изменяться
медленнее чем синхронная скорость ωо,
и будет постоянно превышать скорость
магнитного поля. За счет этого и возникает
режим торможения с
отдачей энергии в сеть.
Рекуперативное
торможение также может быть реализовано
в электроприводе
грузоподъемных машин при
спуске грузов. Для этого двигатель
включается в направлении спуска груза
(характеристика 2 рис. 1 б).
После
окончания торможения он будет работать
в точке со скоростью –ωуст2. При этом
осуществляется процесс спуска груза с
отдачей энергии в сеть.
Рекуперативное
торможение является наиболее экономичным
видом торможения.
Торможение
асинхронного электродвигателя
противовключением
Перевод
асинхронного двигателя в режим торможения
противовключением может быть выполнен
двумя путями. Один из них связан с
изменением чередования двух фаз питающего
электродвигатель напряжения.
Допустим,
что двигатель работает на характеристике
1 (рис. 1 б) при чередовании фаз напряжения
АВС. Тогда при переключении двух фаз
(например, В и С) он переходит на
характеристику 2, участок аб которой
соответствует торможению противовключением.
Обратим
внимание на то обстоятельство, что при
противовключении скольжение
асинхронного двигателя
изменяется от S = 2 до S = 1.
Ротор
при этом вращается против направления
движения поля и постоянно замедляется.
Когда скорость спадает до нуля, двигатель
должен быть отключен от сети, иначе он
может перейти в двигательный режим,
причем ротор его будет вращаться в
направлении, обратном предыдущему.
При
торможении противовключением токи в
обмотке двигателя могут в 7–8 раз
превышать соответствующие номинальные
токи. Заметно уменьшается коэффициент
мощности двигателя. О КПД в данном случае
говорить не приходится, т.к. и преобразуемая
в электрическую механическая энергия
и энергия, потребляемая из сети,
рассеиваются в активном сопротивлении
ротора, и полезно используемой энергии
в данном случае нет.
Короткозамкнутые
двигатели кратковременно перегружаются
по току. Правда, у них при (S > 1) вследствие
явления вытеснения тока заметно
возрастает активное сопротивление
ротора. Это приводит к уменьшению и
увеличению момента.
С
целью увеличения эффективности торможения
двигателей с фазным ротором в цепи их
роторов вводят добавочные сопротивления,
что позволяет ограничить токи в обмотках
и увеличить момент.
Другой
путь торможения противовключением
может быть использован при активном
характере момента нагрузки, который
создается, например, на валу двигателя
грузоподъемного механизма.
Допустим,
что требуется осуществить спуск груза,
обеспечивая его торможение с помощью
асинхронного двигателя. Для этого
двигатель путем включения в цепь ротора
добавочного резистора (сопротивления)
переводится на искусственную характеристику
(прямая 3 на рис. 1).
Вследствие
превышения моментом нагрузки Мс пускового
момента Мп двигателя и его активного
характера груз может опускаться с
установившейся скоростью –ωуст2. В этом
режиме торможение скольжения асинхронного
двигателя может изменяться от S = 1 до S
= 2.
Динамическое
торможение асинхронного двигателя
Для
динамического торможения обмотки
статора двигатель отключают от сети
переменного тока и подключают к источнику
постоянного тока, как это показано на
рис. 2. Обмотка ротора при этом может
быть закорочена, или в ее цепь включаются
добавочные резисторы с сопротивлением
R2д.

Рис.
2. Схема динамического торможения
асинхронного двигателя (а) и схема
включения обмоток статора (б)
Постоянный
ток Iп, значение которого может
регулироваться резистором 2, протекает
по обмоткам статора и создает относительно
статора неподвижное магнитное поле.
При вращении ротора в нем наводится
ЭДС, частота которой пропорциональна
скорости. Эта ЭДС, в свою очередь, вызывает
появление тока в замкнутом контуре
обмотки ротора, который создает магнитный
поток, также неподвижный относительно
статора.
Взаимодействие
тока ротора с результирующим магнитным
полем асинхронного двигателя создает
тормозной момент, за счет которого
достигается эффект торможения. Двигатель
в этом случае работает в режиме генератора
независимо от сети переменного тока,
преобразовывая кинетическую энергию
движущихся частей электропривода и
рабочей машины в электрическую, которая
рассеивается в виде тепла в цепи ротора.
На
рисунке 2 б показана наиболее
распространенная схема включения
обмоток статора при динамическом
торможении. Система возбуждения двигателя
в этом режиме является несимметричной.
Для
проведения анализа работы асинхронного
двигателя в режиме динамического
торможения несимметричную систему
возбуждения заменяют симметричной. С
этой целью принимается допущение, что
статор питается не постоянным током
Iп, а некоторым эквивалентным трехфазным
переменным током, создающим такую же
МДС (магнитодвижущую силу), что и
постоянный ток.
Электромеханическая
и механические характеристики представлены
на рис. 3.

Рис.
3. Электромеханическая и механические
характеристики асинхронного двигателя
Характеристика
расположена на рисунке в первом квадранте
I, где s
= ω
/ ωo
– скольжение асинхронного двигателя
в режиме динамического торможения.
Механические характеристики двигателя
расположены во втором квадранте II.
Различные
искусственные характеристики асинхронного
двигателя в режиме динамического
торможения можно получить, изменяя
сопротивление R2д
добавочных резисторов 3 (рис. 2) в цепи
ротора или постоянный ток Iп,
подаваемый в обмотки статора.
Варьируя
значения R2д
и Iп,
можно получить желаемый вид механических
характеристик асинхронного двигателя
в режиме динамического торможения и,
тем самым, соответствующую интенсивность
торможения асинхронного электропривода.
21.Класифікація
засобів живлення електричною енергією.
Основные параметры электродвигателя
- Мощность электродвигателя
- Номинальная частота вращения
- Коэффициент полезного действия
- Момент электродвигателя
- Момент инерции ротора
- Номинальное напряжение
- Электрическая постоянная времени
Мощность электродвигателя
Мощность электродвигателя — это полезная механическая мощность на валу электродвигателя.
Механическая мощность
Мощность — физическая величина, показывающая какую работу механизм совершает в единицу времени.

- где P – мощность, Вт,
- A – работа, Дж,
- t — время, с
Работа — скалярная физическая величина, равная произведению проекции силы на направление F и пути s, проходимого точкой приложения силы.

- где s – расстояние, м
Для вращательного движения

- где θ – угол, рад

- где ω – углавая частота, рад/с,
Таким образом можно вычислить значение механической мощности на валу вращающегося электродвигателя

Справка: Номинальное значение — значение параметра электротехнического изделия (устройства), указанное изготовителем, при котором оно должно работать, являющееся исходным для отсчета отклонений.
Частота вращения

- где n — частота вращения электродвигателя, об/мин
Момент инерции ротора
Момент инерции — скалярная физическая величина, являющаяся мерой инертности тела во вращательном движении вокруг оси, равна сумме произведений масс материальных точек на квадраты их расстояний от оси

- где J – момент инерции, кг∙м2,
- m — масса, кг
Справка: В английской системе мер момент инерции измеряется в унция-сила-дюйм (oz∙in∙s2)
1 oz∙in∙s2 = 0,007062 kg∙m2 (кг∙м2)
Момент инерции связан с моментом силы следующим соотношением

- где ε – угловое ускорение, с-2

Справка: Определение момента инерции вращающейся части электродвигателя описано в ГОСТ 11828-86
Коэффициент полезного действия электродвигателя
Коэффициент полезного действия (КПД) электродвигателя — характеристика эффективности машины в отношении преобразования электрической энергии в механическую.

- где η – коэффициент полезного действия электродвигателя,
- P1 — подведенная мощность (электрическая), Вт,
- P2 — полезная мощность (механическая), Вт
- При этом
потери в электродвигатели
- обусловлены:
- электрическими потерями — в виде тепла в результате нагрева проводников с током;
- магнитными потерями — потери на перемагничивание сердечника: потери на вихревые токи, на гистерезис и на магнитное последействие;
- механическими потерями — потери на трение в подшипниках, на вентиляцию, на щетках (при их наличии);
- дополнительными потерями — потери вызванные высшими гармониками магнитных полей, возникающих из-за зубчатого строения статора, ротора и наличия высших гармоник магнитодвижущей силы обмоток.
КПД электродвигателя может варьироваться от 10 до 99% в зависимости от типа и конструкции.
Международная электротехническая комиссия (International Electrotechnical Commission) определяет требования к эффективности электродвигателей. Согласно стандарту IEC 60034-31:2010 определено четыре класса эффективности для синхронных и асинхронных электродвигателей: IE1, IE2, IE3 и IE4.

Номинальное напряжение
Номинальное напряжение (англ. rated voltage) — напряжение на которое спроектирована сеть или оборудование и к которому относят их рабочие характеристики.
Электрическая постоянная времени
Электрическая постоянная времени — это время, отсчитываемое с момента подачи постоянного напряжения на электродвигатель, за которое ток достигает уровня в 63,21% (1-1/e) от своего конечного значения.

- где
 – постоянная времени, с
– постоянная времени, с
 – постоянная времени, с
– постоянная времени, сМомент электродвигателя
Вращающий момент (синонимы: вращательный момент, крутящий момент, момент силы) — векторная физическая величина, равная произведению радиус вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы.

- где M – вращающий момент, Нм;
- F – сила, Н;
- r – радиус-вектор, м
Справка: Номинальный вращающий момент Мном, Нм, определяют по формуле

- где Pном – номинальная мощность двигателя, Вт,
- nном — номинальная частота вращения, мин-1
Начальный пусковой момент — момент электродвигателя при пуске.
Справка: В английской системе мер сила измеряется в унция-сила (oz, ozf, ounce-force) или фунт-сила (lb, lbf, pound-force)
1 oz = 1/16 lb = 0,2780139 N (Н)
1 lb = 4,448222 N (Н)
момент измеряется в унция-сила на дюйм (oz∙in) или фунт-сила на дюйм (lb∙in)
1 oz∙in = 0,007062 Nm (Нм)
1 lb∙in = 0,112985 Nm (Нм)
Механическая характеристика
Механическая характеристика двигателя представляет собой графически выраженную зависимость частоты вращения вала от электромагнитного момента при неизменном напряжении питания.
Области применения электродвигателей
Электродвигатели являются крупнейшими потребителями электроэнергии в мире, на них приходится около 45% от всей потребляемой электроэнергии.
- Электродвигатели используются повсеместно, основные области применения:
- промышленность: насосы, вентиляторы, компрессоры, конвейеры, движущая сила для других машин и др.
- строительство: насосы, вентиляторы, конвейеры, лифты, системы отопления, вентиляции и кондиционирование воздуха и др.
- потребительские устройства: холодильники, кондиционеры, персональные компьютеры и ноутбуки (жесткие диски, вентиляторы), пылесосы, стиральные машинки, миксеры и др.
| ЭД1 | Функции | Области применения |
|---|---|---|
| Вращающиеся электродвигатели | Насосы | Системы водоснабжения и водоотведения |
| Системы перекачки охлажденной или нагретой воды, системы отопления, ОВК2, системы полива | ||
| Системы канализации | ||
| Перекачка нефтепродуктов | ||
| Вентиляторы | Приточно-вытяжная вентиляция, ОВК2, вентиляторы | |
| Компрессоры | Системы вентиляции, холодильные и морозильные установки, ОВК2 | |
| Накопление и распределение сжатого воздуха, пневматические системы | ||
| Системы сжижения газа, системы перекачки природного газа | ||
| Вращение, смешивание, движение | Прокатный стан, станки: обработка металла, камня, пластика | |
| Прессовое оборудование: обработка алюминия, пластиков | ||
| Обработка текстиля: ткачество, стирка, сушка | ||
| Смешивание, взбалтывание: еда, краски, пластики | ||
| Транспорт | Пассажирские лифты, эскалаторы, конвейеры | |
| Грузовые лифты, подъемные краны, подъемники, конвейеры, лебедки | ||
| Транспортные средства: поезда, трамваи, троллейбусы, автомобили, электромобили, автобусы, мотоциклы, велосипеды, зубчатая железная дорога, канатная дорога | ||
| Угловые перемещения (шаговые двигатели, серводвигатели) |
Вентили (открыть/закрыть) | |
| Серво (установка положения) | ||
| Линейные электродвигатели | Открыть/закрыть | Вентили |
| Сортировка | Производство | |
| Хватать и перемещать | Роботы |
Примечание:
- ЭД — электродвигатель
- ОВК — системы отопления, вентиляции и кондиционирование воздуха
Способ измерения момента инерции асинхронного электрического двигателя
Изобретение относится к способам определения момента инерции электрических двигателей в процессе их испытаний. Сущность изобретения заключается в том, что на конец выходного вала асинхронного электрического двигателя поочередно устанавливаются два диска (первый и второй) одинаковой массы, но с различными известными эталонными моментами инерции, а момент инерции асинхронного электрического двигателя определяется как отношение произведения углового ускорения системы вращающихся масс «первый диск с эталонным моментом инерции, асинхронный электрический двигатель» на разность моментов инерции первого и второго дисков с эталонными моментами инерции к разности углового ускорения системы вращающихся масс «второй диск с эталонным моментом инерции, асинхронный электрический двигатель» и углового ускорения системы вращающихся масс «второй диск с эталонным моментом инерции, асинхронный электрический двигатель» минус момент инерции второго диска с эталонным моментом инерции. Технический результат заключается в повышении точности измерения момента инерции асинхронного электрического двигателя при использовании дисков с эталонными моментами инерции. 2 ил.
Изобретение относится к способам определения момента инерции электрических двигателей в процессе их испытаний.
Известен способ определения момента инерции электрических двигателей, при котором момент инерции электрического двигателя определяется на основании сравнения значений угловых ускорений двигателя с установленным диском с эталонным моментом инерции и значений угловых ускорений двигателя без диска с эталонным моментом инерции (пат. 2425342 Рос. Федерация: МПК G01M 1/10).
Недостатком данного способа являются погрешности измерений, связанные с различными значениями силы давления вала электрического двигателя на его опорные подшипники: при установленном диске с эталонным моментом инерции и без диска с эталонным моментом инерции. Это приводит к различным условиям трения в подшипниковых узлах, что вносит дополнительные погрешности в процесс измерения.
Изобретение направлено на повышение точности определения момента инерции асинхронного электрического двигателя.
Сущность изобретения заключается в том, что на конец выходного вала асинхронного электрического двигателя поочередно устанавливаются два диска (первый и второй) одинаковой массы, но с различными известными эталонными моментами инерции, а момент инерции асинхронного электрического двигателя определяется как отношение произведения углового ускорения системы вращающихся масс «первый диск с эталонным моментом инерции, асинхронный электрический двигатель» на разность моментов инерции первого и второго дисков с эталонными моментами инерции к разности углового ускорения системы вращающихся масс «второй диск с эталонным моментом инерции, асинхронный электрический двигатель» и углового ускорения системы вращающихся масс «второй диск с эталонным моментом инерции, асинхронный электрический двигатель» минус момент инерции второго диска с эталонным моментом инерции. Технический результат заключается в возможности повышения точности измерения момента инерции асинхронного электрического двигателя при использовании дисков с эталонными моментами инерции.
Новизна заключается в том, что момент инерции асинхронного электрического двигателя определяется с помощью двух дисков одинаковой массы, но различными известными эталонными моментами инерции.
На фиг. 1 и 2 изображена схема реализации предлагаемого способа определения момента инерции асинхронного электрического двигателя с использованием двух дисков одинаковой массы, но с различными значениями известных эталонных моментов инерции, 5 и 6.
На первом этапе на конец выходного вала 3 с помощью полумуфты 4 и скрепляющих устройств устанавливаем диск 5 массой m с эталонным моментом инерции J1. Затем мы разгоняем систему вращающихся масс «асинхронный электрический двигатель, эталонный диск 5» с помощью асинхронного электрического двигателя 2, и с помощью датчика угловых ускорений 1 регистрируем значения углового ускорения ε1 в заданном скоростном диапазоне. При этом выражение для крутящего момента примет вид:
![]()
где J1 — момент инерции эталонного диска 5, обладающего массой m; J2 — момент инерции эталонного диска 6, обладающего массой m; JЭД — момент инерции испытательной установки без эталонного диска.
На следующем этапе мы заменяем эталонный диск 5 на эталонный диск 6 той же массы, но с другим, меньшим, моментом инерции J2. С помощью асинхронного электрического двигателя система вращающихся масс «асинхронный электрический двигатель, эталонный диск 6» разгоняется, и с помощью датчика угловых ускорений регистрируется результирующее угловое ускорение ε2.
При этом выражение для крутящего момента примет вид:
![]()
Поскольку при неизменных значениях напряжения питающей сети в заданном скоростном диапазоне внешняя характеристика асинхронного электрического двигателя остается неизменной, то, следовательно, можно приравнять правые части выражений (1) и (2) и найти выражение для JЭД+J2:
![]()
Определяем момент инерции асинхронного электрического двигателя:
![]()
Таким образом, используя два диска одинаковой массы, но с различными известными эталонными моментами инерции, можно определить момент инерции асинхронного электрического двигателя с увеличенной точностью за счет создания одинаковой нагрузки на опорные подшипники качения в асинхронном электрическом двигателе, а, следовательно, одинаковых условий трения в них, при обоих запусках асинхронного электрического двигателя.
Способ измерения момента инерции асинхронного электрического двигателя, отличающийся тем, что на конец выходного вала асинхронного электрического двигателя поочередно устанавливаются два диска (первый и второй) одинаковой массы, но с различными известными эталонными моментами инерции, а момент инерции асинхронного электрического двигателя определяется как отношение произведения углового ускорения системы вращающихся масс «первый диск с эталонным моментом инерции, асинхронный электрический двигатель» на разность моментов инерции первого и второго дисков с эталонными моментами инерции к разности углового ускорения системы вращающихся масс «второй диск с эталонным моментом инерции, асинхронный электрический двигатель» и углового ускорения системы вращающихся масс «второй диск с эталонным моментом инерции, асинхронный электрический двигатель» минус момент инерции второго диска с эталонным моментом инерции.
Похожие патенты:

Изобретение относится к балансировочной технике, в частности к горизонтальным балансировочным станкам, а именно к калибровочным роторам. Устройство содержит по меньшей мере один главный барабан (12) с продольной осью А, периферия которого содержит точки (38) крепления балансировочных инерционных грузов, равномерно распределенные в осевом и угловом направлениях вокруг упомянутой оси А, и средства (18, 20) направления во вращении, расположенные на каждом из концов (14, 16) упомянутого главного барабана (12).

Балансировочное устройство (1) для вращающегося тела (10), имеющее ось вращения (10а) и включающее: некоторое число балансирующих головок (30), выровненных по оси вращения (10а), причем каждая балансировочная головка включает: балансировочные массы (31), подходящие для перемещения по меньшей мере по окружности движения, чтобы устранить разбалансировку вращающегося тела (10); по меньшей мере один двигатель (32), подходящий для перемещения балансировочных масс (31) по отдельности, причем балансировочные массы (31) являются частью разных балансировочных головок (30), отстоящих друг от друга по оси вращения (10а); средства обнаружения разбалансировки (5), включающие некоторое число детекторов вибрации (5а), подходящих для измерения вибраций, вызванных разбалансировкой вращающегося тела (10).

Представлен способ низкоскоростной балансировки ротора, содержащего по меньшей мере один узел лопаток ступени компрессора. Узел имеет ряд лопаток, расположенных по периферии, и включает в себя окружной зазор.

Изобретение относится к машиностроению, в частности к средствам балансировки роторных машин, а именно газотурбинного двигателя. Объектом изобретения является инструмент для балансировки модуля (10) газотурбинного двигателя в балансировочном станке, при этом модуль содержит по меньшей мере один картер (14) статора и ротор (16), содержащий вал (18) с продольной осью А и по меньшей мере одну лопаточную ступень (20), окруженную упомянутым картером (14) статора.

Изобретение относится к измерительной технике и может быть использовано для измерения координат центра тяжести реальных объектов (например, транспортных средств), которые допускается наклонять на углы величиной от десятых долей до одного радиана.

Изобретение относится к области технической механики и может быть использовано для определения центра тяжести и веса твердых тел. В способе тело устанавливают вдоль его продольной оси на измерительную и поддерживающую опоры, измеряют давление тела на измерительную опору, затем изменяют положение поддерживающей опоры вдоль продольной оси тела, повторно измеряют давление тела на измерительную опору и по результатам обоих измерений вычисляют вес и координаты центра тяжести тела, а изменение положения поддерживающей опоры осуществляют перемещением тела вдоль его оси, при этом заданное расстояние между опорами сохраняют.

Предусмотрены различные системы и способы для фильтра смазочного вещества. В одном примере способ для фильтра смазочного вещества предусматривает индикацию состояния фильтра на основании разницы между измеренным перепадом давления и ожидаемым перепадом давления в выбранных состояниях, в которых все смазочные вещества, закачиваемые насосом выше по потоку от фильтра, поступают в фильтр.

Изобретение относится к области эксплуатации машин и может быть использовано при испытаниях и калибровке датчиков массового расхода воздуха автомобилей, оборудованных микропроцессорной системой управления двигателем внутреннего сгорания.

Область использования изобретения — исследования физических свойств снежного покрова. Сущность изобретения заключается в том, что выполняют закладку снежного шурфа прямоугольного сечения, затем с помощью жесткой прямоугольной темной пластины-экрана, высотой выше исследуемого снежного покрова, на расстоянии не более 5 см от края фронтальной стенки шурфа, вертикально отделяют снежный блок in situ.

Группа изобретений относится к испытательной технике, а именно к установкам для испытаний изделий на воздействие линейных ускорений. Установка центробежная содержит фундаментную опору, вертикальный двухопорный вал с верхней и нижней опорами, привод вала, установленный на раме, шарнирно закрепленную на вертикальном валу с возможностью изменения местоположения ее оси качания несущую балку, представляющую собой коробчатый корпус с жестко закрепленными на его противоположных сторонах цапфами с надетыми на них подшипниками.

Изобретение относится к торсиометру, содержащему корпус (12), в котором может поступательно перемещаться подвижный элемент (14), перемещающийся в продольном направлении под воздействием осевого давления, представляющего предназначенный для измерения момент вращения.

Изобретение обеспечивает оборудование для изготовления вала датчика крутящего момента путем формирования магнитострикционной области, включающей в себя покрытие на основе металлического стекла с заданным рисунком на боковой поверхности валообразной заготовки.

Изобретение относится к испытаниям транспортных средств. Способ определения мощности двигателя транспортного средства при заданных полной массе, средней скорости движения и показателе категории испытательной дороги, заключается в перемещении транспортного средства по поверхности и расчете мощности исходя из определения расхода топлива, средней скорости движения, коэффициента суммарного сопротивления движению, коэффициента пропорциональности.

Изобретение относится к области измерительной техники и может быть использовано для автоматизированного определения величины момента, создаваемого плоской спиральной пружиной или торсионом с неограниченным углом закрутки.

Изобретение относится к системе стеклоочистителя. Система включает в себя узел стеклоочистителя, датчик влажности оконного стекла, датчик крутящего момента стеклоочистителя и модуль управления.

Изобретение относится к машиностроению, а именно к оборудованию для испытания, и может быть использовано для измерения крутящего момента в силовых установках, например в двигателях внутреннего сгорания.

Изобретение относится к области авиации, в частности к средствам для проведения испытаний приводов и движителей летательных аппаратов. Стенд для определения характеристик электроприводов и движителей беспилотных летательных аппаратов содержит корпус стенда, основание с кронштейнами крепления электропривода и датчика крутящего момента.

Изобретение относится к силоизмерительной технике для стендовых испытаний двигателей, а также для контроля за их работой при эксплуатации, например, роторных ветродвигателей с вертикальным вращающимся валом.

Изобретение относится к области испытаний и может быть использовано для повышения энергетической эффективности механической передачи за счет оптимизации ее нагрузочного режима.

Изобретение относится к электроизмерительной технике и может быть использовано для измерения вращающих моментов на валу электродвигателей, преимущественно не допускающих дополнительного воздействия во время работы на вращающуюся часть, например электродвигателей гироскопов.
Определение приведённого момента инерции системы. Определение заданных критериев для трехфазного асинхронного электродвигателя с короткозамкнутым ротором
Страницы работы
Содержание работы
Задание по
контрольной работе
Задача 1. Для
трехфазного асинхронного электродвигателя с короткозамкнутым ротором, имеющего
номинальную мощность ![]() , включенного под напряжение
, включенного под напряжение
сети ![]() , определить:
, определить:
– способ
соединения статорных обмоток и вычертить схему подключения электродвигателя;
– номинальный
вращающий момент ![]() ;
;
– максимальный
(критический) момент ![]() ;
;
– пусковой
момент ![]() ;
;
– линейные и
фазные номинальные токи ![]() ;
;
– пусковые
токи ![]() ;
;
– скольжение
при номинальной нагрузке ![]() ;
;
– критическое
скольжение ![]() ;
;
– мощность,
потребляемая из сети ![]() при номинальной нагрузке.
при номинальной нагрузке.
Построить
механическую характеристику электродвигателя ![]() по
по
точкам, соответствующим скольжениям ![]() .
.
Определить для
указанных точек скольжений моменты сопротивления механизма, приведённые к
угловой скорости вращения вала электродвигателя.
Построить
приведённую механическую характеристику механизма ![]() в
в
одних координатах с характеристикой двигателя.
Определить
значения момента на валу электродвигателя при установившемся режиме работы.
В тех же
координатах построить график избыточного момента ![]() .
.
Задача 2.
Определить приведённый момент инерции системы ![]() .
.
С учетом данных задачи 1 определить время разбега электропривода от
неподвижного состояния до номинальной угловой скорости вращения. Построить
график зависимости угловой скорости вращения от времени ![]() при
при
разгоне, совместив координату ![]() с графиком задачи
с графиком задачи
1.
Задача 3. По
4…6 точкам рассчитать и построить кривые нагрева и охлаждения электродвигателя
при номинальной длительной нагрузке. Аналитическим и графическим способами
определить постоянные времени при нагреве ![]() и
и
охлаждения ![]() и установившееся превышение
и установившееся превышение
температуры двигателя над температурой окружающей среды ![]() .
.
Определить
допустимую мощность электродвигателя, если он будет работать в
повторно-кратковременном режиме с заданной ПВ%.
Задача 4. по
результатам задач 1…3 произвести проверку устойчивости пуска электродвигателя
при снижении питающего напряжения на ![]() , и проверку
, и проверку
устойчивости работы электродвигателя привода при номинальной нагрузке при
снижении питающего напряжения на ![]() . Решение выполнить
. Решение выполнить
графически в относительных координатах ![]() .
.
Решение Задачи
1.
Номинальное
напряжение двигателя ![]() , напряжение сети
, напряжение сети ![]() , следовательно, обмотки двигателя
, следовательно, обмотки двигателя
нужно соединить «треугольником».
Рисунок 1 –
Соединение обмоток двигателя «треугольником»
Определяем
номинальный момент двигателя
 ,
,
(1)
где ![]() – номинальная мощность на
– номинальная мощность на
валу электродвигателя, ![]() =5500Вт;
=5500Вт;
![]() – номинальная
– номинальная
угловая скорость вала, определяется по формуле
 ,
,
(2)
Номинальную частоту ![]() вращения, находим через номинальное
вращения, находим через номинальное
скольжение
 тогда
тогда ![]() ,
,
где ![]() – частота вращения
– частота вращения
магнитного поля, мин-1.
Частоту вращения магнитного поля
находим из выражения
(3)
где ![]() – частота питающей сети,
– частота питающей сети, ![]() ;
;
![]() – число пар
– число пар
полюсов обмотки статора, ![]() .
.
Подставляем исходные данные в
формулы и получаем
 ,
,
![]() ,
,
 ,
,
 .
.
Определяем
критический момент по формуле
![]() ,
,
(4)
где ![]() – перегрузочная способность
– перегрузочная способность
электродвигателя, ![]() .
.
Получаем
![]() .
.
Определяем
пусковой момент по формуле
![]() ,
,
(5)
где ![]() – кратность пускового
– кратность пускового
момента, ![]() .
.
Получаем ![]() .
.
Определяем
линейные и фазные номинальные токи ![]() . При соединении
. При соединении
«треугольником» ![]() , а линейные и фазное
, а линейные и фазное
напряжение ![]() .
.
 ,
,
(6)
где ![]() – фазное напряжение,
– фазное напряжение, ![]() ,
,
![]() – номинальный
– номинальный
коэффициент мощности, ![]() ,
,
![]() – к.п.д.
– к.п.д.
электродвигателя, ![]() .
.
Подставляем
числа в формулы и получаем
 ,
,
![]() .
.
Определяем
пусковые токи ![]() , через кратность пускового
, через кратность пускового
тока  , следовательно
, следовательно ![]() , при значении
, при значении ![]() получаем
получаем
![]() ,
,
![]() .
.
Определяем
критическое скольжение по формуле
![]() .
.
(7)
Подставляем
числа и получаем
![]() .
.
Мощность,
расходуемая электродвигателем из сети
![]() .
.
(8)
Получаем ![]() .
.
Определение
момента двигателя ![]() для построения
для построения
механической характеристики ![]() производиться по
производиться по
различным формулам. При скольжении малых (от 0 до 0,3) для упрощения расчетов пользуемся
формулой Клосса
 .
.
(9)
При скольжениях больших (от 0,3
до 1) значение момента, полученные расчетом по формуле Клосса, не точны, чем
больше скольжение, тем больше ошибка. Поэтому будем пользоваться формулами
 , (10)
, (10)
 ,
,
(11)
 .
.
(12)
Для ![]() получаем
получаем
 .
.
Для ![]() получаем
получаем
 ,
,
 ,
,
 ,
,
Считаем для
остальных значений скольжения и полученные данные заносим в таблицу 1. По
данным таблицы 1 строим механическую характеристику электродвигателя ![]() (рисунок 2); по горизонтали
(рисунок 2); по горизонтали
откладываем ![]() ; по вертикали откладываем
; по вертикали откладываем ![]() .
.
Находим
номинальную частоту вращения рабочей машины
 ,
,
(13)
где ![]() – передаточное число
– передаточное число
редуктора.
Получаем
 .
.
Уравнение
механической характеристики рабочей машины, приведенное к частоте вращения вала
двигателя имеет вид
 ,
,
(14)
где ![]() – номинальный приведенный
– номинальный приведенный
момент сопротивления механизма, его принимаем равным номинальному моменту
двигателя, ![]() ;
;
![]() – начальный
– начальный
приведённый момент сопротивления механизма, можно принять равным ![]() ,
, ![]() ;
;
![]() – текущее
– текущее
значение угловой скорости вращения электродвигателя, рад/с;
![]() – показатель
– показатель
степени уравнения (для вентилятора, насоса ![]() ).
).
Текущая угловая скорость вращения
вала электродвигателя ![]() может быть выражена через
может быть выражена через
номинальную ![]() приближенно так:
приближенно так:
![]() .
.
Тогда
предыдущее уравнение приведённого момента механизма запишется:
![]() .
.
(15)
При скольжении
![]() получаем момент сопротивления
получаем момент сопротивления
![]() .
.
Аналогично
считаем момент сопротивления механизма для остальных значений скольжений, и
полученные данные заносим в таблицу 1. Далее строим механическую характеристику
рабочей машины на рисунке 2.
Таблица 1 –
Зависимость момента двигателя и момента сопротивления механизма от угловой
скорости.
|
Угловая скорость |
78,54 |
74,61 |
70,69 |
64,73 |
62,83 |
54,98 |
39,27 |
0 |
|
Скольжение |
0 |
0,05 |
0,10 |
0,18 |
0,20 |
0,30 |
0,50 |
1,00 |
|
Момент двигателя |
0 |
73,71 |
120,39 |
140,06 |
138,90 |
136,37 |
126,12 |
103,20 |
|
Момент сопр. мех. |
73,71 |
67,96 |
62,51 |
54,80 |
52,48 |
43,64 |
29,49 |
14,74 |
|
Избыточный момент |
-73,71 |
5,75 |
57,88 |
85,25 |
86,41 |
92,73 |
96,63 |
88,46 |
Момент
сопротивления на валу машины находим по формуле
 .
.
Рисунок 2 – механические характеристики электродвигателя и рабочей
машины, избыточный момент и время разгона электропривода.
Решение Задачи
2.
Находим
приведённый момент инерции электропривода ![]() по
по
формуле
 ,
,
(16)
где ![]() – момент инерции двигателя,
– момент инерции двигателя,
![]() ;
;
![]() – момент инерции передаточного звена
– момент инерции передаточного звена
(редуктора), определяется по соотношению ![]() ;
;
коэффициент ![]() ,
,
Похожие материалы
- Исследование трёхфазной системы при соединении нагрузки звездой
- Учёт и измерение электрической энергии в цепях переменного тока
- Асинхронные двигатели с короткозамкнутым ротором
Информация о работе
Тип:
Задания на контрольные работы