3.1.9.1 Приведенные силы и моменты
При исследовании
движения механизма, находящегося под
действием заданных сил, удобно все силы,
действующие на звенья, заменять силами,
приложенными к одному из звеньев
механизма. Такие заменяющие силы получили
название приведенных сил.
Приведенная
силаилиприведенный момент– условная сила или момент пары сил,
которые приложены к звену приведения
и развивают мощность, равную сумме
мощностей, развиваемых звеньями. Т.е.:
Рпр=∑Ni/υпр;
(3.41)
Мпр=∑Ni/ωпр,
(3.42)
где Ni
— мощность, развиваемаяi-тымзвеном;υпр— линейная
скорость звена приведения,ωпр– угловая скорость звена приведения.
Звено механизма,
к которому приложена приведенная сила,
называется звеном приведения.
Точка приложения приведенных сил
называетсяточкой приведения.
За звено приведения обычно принимается
звено, закон движения которого задан.
Таким звеном является кривошип.
Известно, что
мощность приведенных сил, есть производная
работы по времени
Ni
= dA/dt.
(3.43)
Работа есть
произведение силы на расстояние
dA/dt= (РпрdS)/dt. (3.44)
Т.к. производная
расстояния по времени есть скорость
(dS/dt=υпр), то
dA/dt=Рпрυпр(3.45)
или, учитывая формулы (3.43) и
(3.45), имеем:
Ni
= Рпрυпр.
(3.46)
Работа вычисляется
по формуле (см. п. 3.1.6):
dA/dt=Рίυίcosαί
+ Мίω
ί
или, учитывая уравнение (3.43),
получим:
Ni=
Рίυίcosαί
+ Мίω
ί.
(3.47)
Приравнивая
равенства (3.46) и (3.47)
Рпрυпр
=Рίυίcosαί
+ Мίω
ί
и, выразив приведенную силу,
получим выражение для Рпр
![]() .
.
(3.48)
Приведенный
момент и приведенная сила связаны между
собой зависимостью
Мпр=
РпрℓОА =
(Нм). (3.49)
Подставив формулу
Рпрв формулуМпри, учитывая, чтоℓОА=
υпр/ωпр,
получим
![]() .
.
(3.50)
Сравнивая формулы
(3.48) и (3.34) из п. 3.1.6, увидим идентичность
этих выражений. Поэтому имеет место
следующий вывод.
|
Рпр |
Приведенная Рпр=-Рур. |
 Рур
Рур А
А 1
1

 О
ОПоэтому, чтобы
определить приведенную силу, можно
воспользоваться соотношениями (3.34),
(3.48), использовать последовательный
силовой расчет механизма и ведущего
звена или применить «жесткий» рычаг
Н.Е. Жуковского.
3.1.9.2 Приведенные массы и приведенные моменты инерции.
Кинетическая энергия
механизма
Для начала
рассмотрим кинетическую энергиюмеханизма.
При поступательном движении
кинетическая энергия вычисляется по
формуле:
Тпост=![]() =(Дж).
=(Дж).
Для вращательного движения
формула кинетической энергии имеет
вид:
Твр=![]() =(Дж).
=(Дж).
Для звена, имеющего сложное
(плоскопараллельное) движение, кинетическая
энергия будет вычисляться следующим
образом:
Тсл=
![]() =(Дж).
=(Дж).
Кинетическая
энергия всего механизма будет равна
сумме кинетических энергий отдельных
его звеньев:
Тмех =
![]() =(Дж), (3.51)
=(Дж), (3.51)
где mi
— массаi-того звена,υi —
скоростьi-того звена,
JSi
— осевой момент инерцииi-того
звена,ωi
— угловая скоростьi-того
звена.
Теперь определим,
как находятся приведенная масса и
приведенный осевой момент инерции. Для
начала дадим их определение.
Приведенная
масса(приведенный момент
инерции) – условная масса (условный
момент инерции), сосредоточенные в точке
приведения, кинетическая энергия которых
равна сумме кинетических энергий всех
звеньев механизма, т.е.:
mпр=![]() =(кг); (3.52)
=(кг); (3.52)
Jпр=
![]() = (кгм2).
= (кгм2).
(3.53)
Подставляя
выражение (3.51) в формулы (3.52) и (3.53),
получим:
mпр=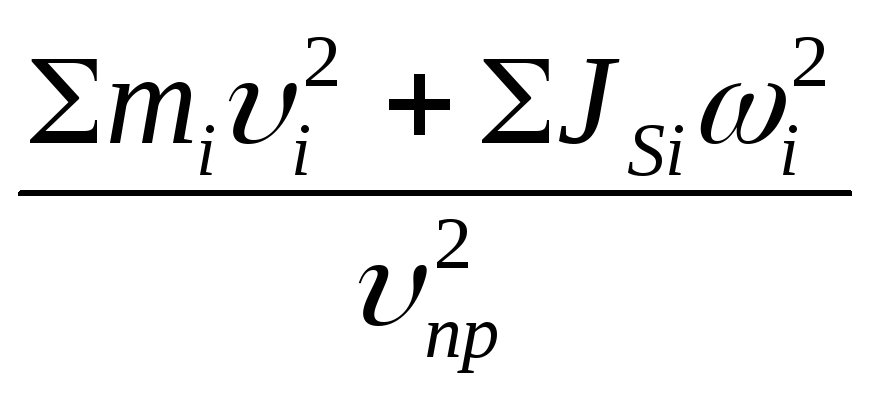 =(кг);
=(кг);
(3.54)
Jпр
=
= (кгм2).
(3.55)
Приведенная
масса и приведенный момент инерции
связаны между собой соотношениями:
Jпр=
mпрℓОА= (кгм2).
(3.56)
Сравнивая формулы
(3.51), (3.54) и (3.55), можно заметить, что
числители одинаковы. Поэтому, зная связь
между Т, Jприmпр, можно
легко определить каждую из этих величин.
Вопросы
для самоконтороля
-
Дайте
определение силе движущей, силе
сопротивления. -
Напишите
формулу, по которой определяется модуль
главного вектора силы инерции звена.
Расскажите, как направлен этот вектор. -
Расскажите
о последовательности определения
реакций в многозвенном механизме. -
Расскажите
о последовательности определения
реакций в группе Ассура. -
Расскажите,
как с помощью рычага Н.Е. Жуковского
определить уравновешивающую силу
(уравновешивающий момент). -
Что
называют механической характеристикой
машины? Индикаторной диаграммой
двигателя? -
Дайте
определение приведенной силы (приведенного
момента), приведенной массы (приведенного
момента инерции звеньев механизма). -
Докажите,
что приведенный момент инерции звеньев
механизма не зависит от угловой скорости
звена приведения.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
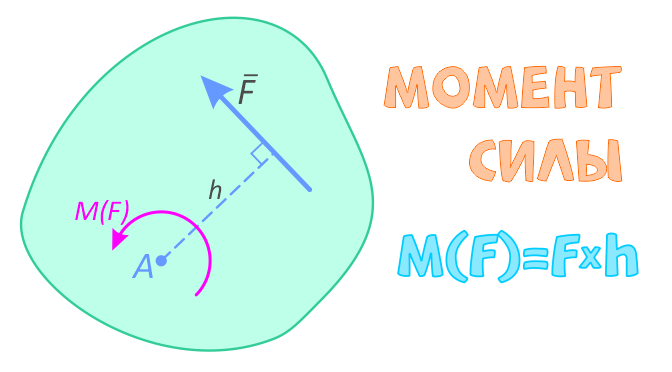

Моментом силы называют вращательное усилие создаваемое вектором силы относительно твердого тела, оси или точки.
Обозначение: M, m или M(F).
Размерность — [Н∙м] (Ньютон на метр) либо кратные значения [кН∙м]
Аналогом момента силы является момент пары сил.
Обязательным условием возникновения момента является то, что точка, относительно которой создается момент не должна лежать на линии действия силы.
Определение
Момент определяется как произведение силы F на плечо h:
M(F)=F×h
Плечо силы h, определяется как кратчайшее расстояние от точки до линии действия силы.
Наш короткий видеоурок про момент силы с примерами:
Другие видео
Например, сила величиной 7 кН приложенная на расстоянии 35см от рассматриваемой точки вращения создает момент M=7×0,35=2,45 кНм.
Пример момента силы
Наиболее наглядным примером момента силы может служить поворачивание гайки гаечным ключом.
Гайки заворачиваются вращением, для этого к ним прикладывается момент, но сам момент возникает при воздействии нашей силы на гаечный ключ.
Вы конечно интуитивно понимаете — для того чтобы посильнее закрутить гайку надо взяться за ключ как можно дальше от нее.
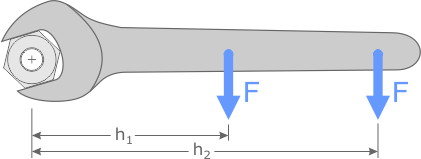
В этом случае, прикладывая ту же силу, мы получаем большую величину момента за счет увеличения её плеча (h2>h1).
Плечом при этом служит расстояние от центра гайки до точки приложения силы.
Плечо момента силы
Рассмотрим порядок определения плеча h момента:
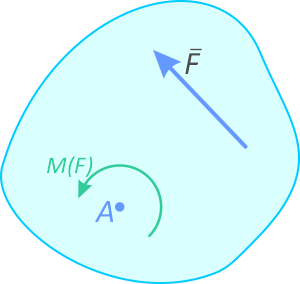
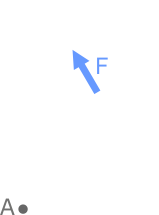
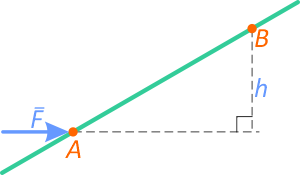
Пусть заданы точка A и некоторая произвольная сила F, линия действия которой не проходит через эту точку. Требуется определить момент силы.
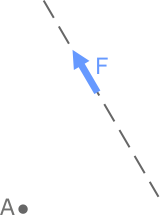
Покажем линию действия силы F (штриховая линия)
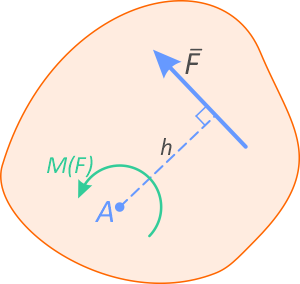
Проведем из точки A перпендикуляр h к линии действия силы
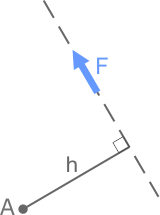
Длина отрезка h есть плечо момента силы F относительно точки A.
Момент принимается положительным, если его вращение происходит против хода часовой стрелки (как на рисунке).
Так принято для того, чтобы совпадали знаки момента и создаваемого им углового перемещения.
Примеры расчета момента силы
Сила расположена перпендикулярно оси стержня
Если сила F приложена перпендикулярно к оси бруса и известно расстояние между точками A и B.

То момент силы F относительно точки A:
МA=F×AB
Сила расположена под углом к оси стержня
В случае, если сила F приложена под углом α к оси балки

Момент силы относительно точки B:
MB=F×cosα×AB
Известно расстояние от точки до линии действия силы
Если известно расстояние от точки где определяется момент до линии действия силы (плечо h)
Момент силы относительно точки B:
MB=F×h
См. также:
- Примеры решения задач >
- Момент силы относительно точки
- Момент силы относительно оси
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
![]()
Загрузить PDF
![]()
Загрузить PDF
Самое лучшее определение вращательного момента – это тенденция силы вращать предмет вокруг оси, точки опоры или точки вращения. Вращательный момент можно рассчитать с помощью силы и плеча момента (перпендикулярное расстояние от оси до линии действия силы), или используя момент инерции и угловое ускорение.
-

1
Определите силы, действующие на тело и соответствующие им моменты. Если сила не перпендикулярна рассматриваемому плечу момента (т.е. она действует под углом), то вам может понадобиться найти ее составляющие с использованием тригонометрических функций, таких как синус или косинус.
- Рассматриваемая составляющая силы будет зависеть от эквивалента перпендикулярной силы.
- Представьте себе горизонтальный стержень, к которому нужно приложить силу 10 Н под углом 30° над горизонтальной плоскостью, чтобы вращать его вокруг центра.
- Поскольку вам нужно использовать силу, не перпендикулярную плечу момента, то для вращения стержня вам необходима вертикальная составляющая силы.
- Следовательно, нужно рассматривать y-составляющую, или использовать F = 10sin30° Н.
-
2
Воспользуйтесь уравнением момента, τ = Fr, и просто замените переменные заданными или полученными данными.
- Простой пример: Представьте себе ребенка массой 30 кг, сидящего на одном конце качели-доски. Длина одной стороны качели составляет 1,5 м.
- Поскольку ось вращения качели находится в центре, вам не нужно умножать длину.
- Вам необходимо определить силу, прилагаемую ребенком, с помощью массы и ускорения.
- Поскольку дана масса, вам нужно умножить ее на ускорение свободного падения, g, равное 9,81 м/с2. Следовательно:
- Теперь у вас есть все необходимые данные для использования уравнения момента:
-
3
Воспользуйтесь знаками (плюс или минус), чтобы показать направление момента. Если сила вращает тело по часовой стрелке, то момент отрицательный. Если же сила вращает тело против часовой стрелки, то момент положительный.
- В случае нескольких приложенных сил, просто сложите все моменты в теле.
- Поскольку каждая сила стремится вызвать различные направления вращения, важно использовать знак поворота для того, чтобы следить за направлением действия каждой силы.
- Например, к ободу колеса, имеющего диаметр 0,050 м, были приложены две силы, F1= 10,0 Н, направленная по часовой стрелке, и F2 = 9,0 Н, направленная против часовой стрелки.
- Поскольку данное тело – круг, фиксированная ось является его центром. Вам нужно разделить диаметр и получить радиус. Размер радиуса будет служить плечом момента. Следовательно, радиус равен 0,025 м.
- Для ясности мы можем решить отдельные уравнения для каждого из моментов, возникающих от соответствующей силы.
- Для силы 1 действие направлено по часовой стрелке, следовательно, создаваемый ею момент отрицательный:
- Для силы 2 действие направлено против часовой стрелки, следовательно, создаваемый ею момент положительный:
- Теперь мы можем сложить все моменты, чтобы получить результирующий вращательный момент:
Реклама



-
1
Чтобы начать решать задачу, разберитесь в том, как действует момент инерции тела. Момент инерции тела – это сопротивление тела вращательному движению. Момент инерции зависит как от массы, так и от характера ее распределения.
- Чтобы четко понимать это, представьте себе два цилиндра одинакового диаметра, но разной массы.
- Представьте себе, что вам нужно повернуть оба цилиндра вокруг их центральной оси.
- Очевидно, что цилиндр с большей массой будет сложнее повернуть, чем другой цилиндр, поскольку он “тяжелее”.
- А теперь представьте себе два цилиндра различных диаметров, но одинаковой массы. Чтобы выглядеть цилиндрическими и иметь разную массу, но в то же время иметь разные диаметры, форма, или распределение массы обоих цилиндров должна отличаться.
- Цилиндр с большим диаметром будет выглядеть как плоская закругленная пластина, тогда как меньший цилиндр будет выглядеть как цельная трубка из ткани.
- Цилиндр с большим диаметром будет сложнее вращать, поскольку вам нужно приложить большую силу, чтобы преодолеть более длинное плечо момента.
-
2
Выберите уравнение, которое вы будете использовать для расчета момента инерции. Есть несколько уравнений, которые можно использовать для этого.
- Первое уравнение – самое простое: суммирование масс и плечей моментов всех частиц.
- Это уравнение используется для материальных точек, или частиц. Идеальная частица – это тело, имеющее массу, но не занимающее пространства.
- Другими словами, единственной значимой характеристикой этого тела является масса; вам не нужно знать его размер, форму или строение.
- Идея материальной частицы широко используется в физике с целью упрощения расчетов и использования идеальных и теоретических схем.
- Теперь представьте себе объект вроде полого цилиндра или сплошной равномерной сферы. Эти предметы имеют четкую и определенную форму, размер и строение.
- Следовательно, вы не можете рассматривать их как материальную точку.
- К счастью, можно использовать формулы, применимые к некоторым распространенным объектам:
-
3
Найдите момент инерции. Чтобы начать рассчитывать вращательный момент, нужно найти момент инерции. Воспользуйтесь следующим примером как руководством:
- Два небольших “груза” массой 5,0 кг и 7,0 кг установлены на расстоянии 4,0 м друг от друга на легком стержне (массой которого можно пренебречь). Ось вращения находится в середине стержня. Стержень раскручивается из состояния покоя до угловой скорости 30,0 рад/с за 3,00 с. Рассчитайте производимый вращательный момент.
- Поскольку ось вращения находится в середине стержня, то плечо момента обоих грузов равно половине его длины, т.е. 2,0 м.
- Поскольку форма, размер и строение “грузов” не оговаривается, мы можем предположить, что грузы являются материальными частицами.
- Момент инерции можно вычислить следующим образом:
-
4
Найдите угловое ускорение, α. Для расчета углового ускорения можно воспользоваться формулой α= at/r.
- Первая формула, α= at/r, может использоваться в том случае, если дано тангенциальное ускорение и радиус.
- Тангенциальное ускорение – это ускорение, направленное по касательной к направлению движения.
- Представьте себе объект, двигающийся по криволинейному пути. Тангенциальное ускорение – это попросту его линейное ускорение на любой из точек всего пути.
- В случае второй формулы, легче всего проиллюстрировать ее, связав с понятиями из кинематики: смещением, линейной скоростью и линейным ускорением.
- Смещение – это расстояние, пройденное объектом (единица СИ – метры, м); линейная скорость – это показатель изменения смещения за единицу времени (единица СИ – м/с); линейное ускорение – это показатель изменения линейной скорости за единицу времени (единица СИ – м/с2).
- Теперь давайте рассмотрим аналоги этих величин при вращательном движении: угловое смещение, θ – угол поворота определенной точки или отрезка (единица СИ – рад); угловая скорость, ω – изменение углового смещения за единицу времени (единица СИ – рад/с); и угловое ускорение, α – изменение угловой скорости за единицу времени (единица СИ – рад/с2).
- Возвращаясь к нашему примеру – нам были даны данные для углового момента и время. Поскольку вращение начиналось из состояния покоя, то начальная угловая скорость равна 0. Мы можем воспользоваться уравнением, чтобы найти:
-
5
Воспользуйтесь уравнением, τ = Iα, чтобы найти вращательный момент. Просто замените переменные ответами, полученными на предыдущих шагах.
- Вы можете заметить, что единица «рад» не подходит к нашим единицам измерения, поскольку считается безразмерной величиной.
- Это значит, что вы можете пренебречь ею и продолжить ваши расчеты.
- Для анализа единиц измерения мы можем выразить угловое ускорение в с-2.
Реклама





Советы
- В первом методе, если тело является кругом и ось его вращения находится в центре, то рассчитывать составляющие силы не нужно (при условии, что сила не приложена под наклоном), поскольку сила лежит на касательной к окружности, т.е. перпендикулярно плечу момента.
- Если вам сложно представить, как происходит вращение, то возьмите ручку и попробуйте воссоздать задачу. Для более точного воспроизведения не забудьте скопировать положение оси вращения и направление приложенной силы.
Реклама
Об этой статье
Эту страницу просматривали 23 928 раз.
Была ли эта статья полезной?
6. Динамика машин
Основными задачами этого раздела являются определение фактической угловой скорости ведущего звена и определение момента инерции маховика, необходимого для поддержания изменения угловой скорости в заданных пределах.
6.1. Вспомогательные задачи динамики машин
Динамическая модель машины
В связи с необходимостью упрощения расчётной схемы и большей наглядности, а также сокращения расчётов реальную машину заменяют её моделью, сохраняющей те свойства машины, которые изучаются на данном этапе исследования. Такая модель представляет собой некоторый условный диск, вращающийся с кривошипом как одно целое, т. е. с его угловой скоростью (рис. 6.1), обладающий так называемым приведённым моментом инерции. На этой основе кривошип или другое ведущее звено, с которым связан условный диск, называется звеном приведе ния. На диск действуют приведённый момент движущих сил, направленный в сторону вращения, и приведённый момент сил сопротивления, направленный навстречу вращению.
ния. На диск действуют приведённый момент движущих сил, направленный в сторону вращения, и приведённый момент сил сопротивления, направленный навстречу вращению.
На схеме рис. 6.1 обозначены  — приведённый момент инерции механизма,
— приведённый момент инерции механизма,  — приведённый момент движущих сил и
— приведённый момент движущих сил и  — приведённый момент сил сопротивления.
— приведённый момент сил сопротивления.
Приведённый момент инерции
Приведённым моментом инерции механизма называется момент инерции условного диска, которым заменяется реальный механизм, обладающего кинетической энергией, равной сумме кинетических энергий всех звеньев механизма.
Кинетическая энергия условного диска  , где
, где  , т. е. угловая скорость звена приведения, равная угловой скорости кривошипа.
, т. е. угловая скорость звена приведения, равная угловой скорости кривошипа.
Рекомендуемые материалы
Кинетическая энергия звена, совершающего поступательное движение,  , где
, где  – масса звена,
– масса звена,  – скорость звена.
– скорость звена.
Кинетическая энергия звена, совершающего вращательное движение,  , где
, где  – момент инерции звена,
– момент инерции звена,  – угловая скорость звена.
– угловая скорость звена.
Кинетическая энергия звена в плоскопараллельном движении  , где
, где  – масса звена,
– масса звена,  – скорость центра масс звена,
– скорость центра масс звена,  – момент инерции звена относительно его центра масс,
– момент инерции звена относительно его центра масс,  – угловая скорость звена. Согласно определению имеем:
– угловая скорость звена. Согласно определению имеем:
 .
.
Подставив сюда записанные выше выражения кинетических энергий и, решая затем полученное равенство относительно , запишем
 .
.
Как видно из этой формулы, приведённый момент инерции зависит от структуры механизма, от массовых характеристик звеньев, от положения механизма и не зависит от угловой скорости ведущего звена. Некоторые механизмы имеют постоянное значение приведённого момента инерции. Машины, в основе которых механизмы с  , называются ротативными.
, называются ротативными.
Приведённый момент сил сопротивления
Приведённым моментом сил сопротивления называется момент, приложенный к звену приведения, мгновенная мощность которого равна сумме мгновенных мощностей всех сил сопротивления, действующих в механизме.
Мгновенная мощность приведённого момента сопротивления  . Мгновенная мощность
. Мгновенная мощность  -той силы сопротивления
-той силы сопротивления  . Согласно определению
. Согласно определению  , поэтому, подставив сюда соответствующие выражения, получаем
, поэтому, подставив сюда соответствующие выражения, получаем  , откуда
, откуда
 .
.
Если среди сил сопротивления имеются моменты, то их можно представить в виде пар сил с плечами, равными длинам соответствующих звеньев.
З а м е ч а н и е . Если во всех математических выражениях заменить силы сопротивления движущими силами, то в результате получится приведённый момент движущих сил:
 .
.
Зависимость приведённых моментов сил от угла поворота, скорости или времени называется механической характеристикой машины.
6.2. Характеристика режимов движения машин
Анализ динамики машин производится на основе теоремы об изменении кинетической энергии системы: изменение (приращение) кинетической энергии системы на её возможном перемещении равно сумме работ всех внешних и внутренних сил на этом перемещении, то есть
 ,
,
где  –кинетическая энергия системы в данный момент времени;
–кинетическая энергия системы в данный момент времени;  – кинетическая энергия системы в последующий момент времени;
– кинетическая энергия системы в последующий момент времени;  – работа движущих сил при перемещении системы из -го до
– работа движущих сил при перемещении системы из -го до  -го положения системы;
-го положения системы;  – работа сил сопротивления на том же перемещении системы. Сумма работ в правой части равенства называется избыточной работой
– работа сил сопротивления на том же перемещении системы. Сумма работ в правой части равенства называется избыточной работой  .
.
В зависимости от соотношения величин правой части этого равенства различают следующие режимы (виды) движения машин.
I. Неустановившийся режим
А) Пуск (разбег). Этот режим имеет место при соотношении работ  или
или  . Тогда в левой части имеет место соотношение
. Тогда в левой части имеет место соотношение  , т. е. кинетическая энергия машины возрастает, и возрастает угловая скорость
, т. е. кинетическая энергия машины возрастает, и возрастает угловая скорость  . Графически это можно представить как на рис. 6.2.
. Графически это можно представить как на рис. 6.2.

Б). Остановка (выбег) имеет место при обратном соотношении работ, т. е.  и
и  . При этом кинетическая энергия машины убывает, и угловая скорость также убывает. Графически этот режим представлен на рис. 6.3. Оба режима не являются рабочими, так как не могут продолжаться долго. Режим пуска заканчивается, когда угловая скорость начинает повторять свои значения, а режим остановки заканчивается полной остановкой машины. При исследовании этих режимов, кроме закона изменения угловой скорости, определяется время пуска или, соответственно, остановки.
. При этом кинетическая энергия машины убывает, и угловая скорость также убывает. Графически этот режим представлен на рис. 6.3. Оба режима не являются рабочими, так как не могут продолжаться долго. Режим пуска заканчивается, когда угловая скорость начинает повторять свои значения, а режим остановки заканчивается полной остановкой машины. При исследовании этих режимов, кроме закона изменения угловой скорости, определяется время пуска или, соответственно, остановки.
II.Установившийся режим
А) Неравновесный. Режим характеризуется тем, что работа движущих сил то больше, то меньше работы сил сопротивления, т. е. в течение цикла имеют место следующие соотношения и . Но за цикл работы машины эти величины одинаковы  , так что в начале и в конце цикла
, так что в начале и в конце цикла  .
.
В результате таких соотношений работ кинетическая энергия машины и угловая скорость ведущего звена в течение цикла изменяются периодически, причём средние значения как кинетической энергии, так и угловой скорости остаются постоянными. Графически характер изменения кинетической энергии и угловой  скорости представлен на рис. 6.4. Средняя угловая скорость определяется соотношением
скорости представлен на рис. 6.4. Средняя угловая скорость определяется соотношением  . Величина, характеризующая отклонение максимальной и минимальной угловой скорости от её среднего значения, называется коэффициентом неравномерности
. Величина, характеризующая отклонение максимальной и минимальной угловой скорости от её среднего значения, называется коэффициентом неравномерности  . Численно коэффициент равен
. Численно коэффициент равен  .
.
Для поддержания изменения угловой скорости в заданных пределах в машинах применяют маховики, представляющие собой колёса с массивным ободом, устанавливаемые на вал ведущего звена и вращающиеся с его угловой скоростью.
Данный режим является рабочим, так как может продолжаться неопределённо долго. В этом режиме работают все машины циклического действия.
Б) Равновесный. Этот режим имеет место в тех машинах, в которых работа движущих сил постоянно равна работе сил сопротивления, т. е.  . Избыточная работа в течение всего цикла равна нулю,
. Избыточная работа в течение всего цикла равна нулю,  . Кинетическая энергия и угловая скорость остаются постоянными (рис. 6.5).
. Кинетическая энергия и угловая скорость остаются постоянными (рис. 6.5).
Такой режим работы характерен для ротативных машин.
6.3. Уравнения движения машин
Уравнение движения в интегральной форме
Основой для вывода уравнения служит соотношение между работой и энергией, вытекающее из теоремы об изменении кинетической энергии системы:  , которое можно представить в виде равенства
, которое можно представить в виде равенства  . В этом равенстве:
. В этом равенстве:  – текущее значение кинетической энергии,
– текущее значение кинетической энергии,  – начальное значение кинетической энергии,
– начальное значение кинетической энергии,  – работа движущих сил, выполненная от начального до текущего момента времени,
– работа движущих сил, выполненная от начального до текущего момента времени,  – работа сил сопротивления, выполненная за то же время.
– работа сил сопротивления, выполненная за то же время.
Величины энергий и работ определяются следующими равенствами:
 ,
,  ,
,  ,
,  .
.
Подставляя эти выражения в вышезаписанное равенство, получаем окончательный вид уравнения:
 .
.
В правой части уравнения подынтегральные выражения представляют собой функции от угла поворота кривошипа, т.е. перемещения. Это значит, что данные функции могут быть определены, только если внешние силы также зависят от перемещений. Данное обстоятельство определяет область применения уравнения в интегральной форме.
Уравнение в дифференциальной форме
Внешние силы, действующие в машинах, могут зависеть не только от перемещений, но и от скоростей, и от времени. В этих случаях уравнение в интегральной форме неприменимо. Для исследования динамики таких машин применяют более универсальное уравнение –уравнение в дифференциальной форме. Оно может быть получено из уравнения в интегральной форме путём дифференцирования по  .
.
 .
.
Сделав замену  и затем, выполнив несложные преобразования, получим окончательно
и затем, выполнив несложные преобразования, получим окончательно  .
.
Первое слагаемое левой части представляет собой момент сил инерции, как следствие изменения . Второе слагаемое представляет также момент сил инерции, но как результат изменения .
6.4. Назначение и приближённое определение
момента инерции маховика
Маховик служит для уменьшения колебаний величины угловой скорости ведущего звена, уменьшения угловых ускорений и, в конечном итоге, инерционных воздействий. Этот эффект, называемый кинематическим, тем больше, чем больше момент инерции маховика. Кинематический эффект тесно связан с динамическим, который заключается в том, что маховик выступает как аккумулятор кинетической энергии. Он накапливает кинетическую энергию в те промежутки времени, когда возрастает его угловая скорость, принимая на себя часть избыточной работы, которая в этом случае не тратится на разгон машины. При уменьшении угловой скорости маховик отдаёт часть накопленной энергии, помогая движущим силам выполнять полезную работу и препятствуя существенному уменьшению угловой скорости. Некоторые машины, например машины ударного действия, без такой помощи не смогли бы функционировать.
 Для расчёта момента инерции маховика примем допущение, что максимальный перепад кинетической энергии машины, численно равный максимальному перепаду избыточной работы, поглощается маховиком. Для иллюстрации этого служит рис. 6.6. Допущение здесь заключается в том, что часть кинетической энергии поглощается звеньями механизма, чем мы пренебрегаем. Обозначим перепад избыточной работы
Для расчёта момента инерции маховика примем допущение, что максимальный перепад кинетической энергии машины, численно равный максимальному перепаду избыточной работы, поглощается маховиком. Для иллюстрации этого служит рис. 6.6. Допущение здесь заключается в том, что часть кинетической энергии поглощается звеньями механизма, чем мы пренебрегаем. Обозначим перепад избыточной работы  . Согласно принятому допущению эта величина составляет разность между максимальным и минимальным значениями кинетической энергии маховика:
. Согласно принятому допущению эта величина составляет разность между максимальным и минимальным значениями кинетической энергии маховика:  ,
,
то есть  .
.
Максимальная величина кинетической энергии маховика вычисляется по формуле
 ,
,
минимальная величина вычисляется по формуле
 .
.
Поэтому разность этих величин даёт выражение
 .
.
Разложив разность квадратов в скобках на множители и заменив последние их выражениями, полученными из приведенных выше формул для вычисления  и , получаем
и , получаем
 .
.
Объединяя результаты выкладок, запишем  и
и  , откуда окончательно получаем
, откуда окончательно получаем
 .
.
Как видно из этой формулы, достичь полного постоянства угловой скорости невозможно, так как для этого необходимо иметь бесконечно большой маховик (требуется  ). Ясно также, что увеличение скорости вращения маховика ведёт к уменьшению его массы и размеров, поэтому целесообразно маховик устанавливать на более быстроходный вал.
). Ясно также, что увеличение скорости вращения маховика ведёт к уменьшению его массы и размеров, поэтому целесообразно маховик устанавливать на более быстроходный вал.
Вопросы для самопроверки
1. Какие задачи решаются при исследовании динамики машин?
2. Что представляет собой динамическая модель машины?
3. Что называется приведённым моментом инерции механизма?
4. Что называется приведённым моментом сил?
5. Какая теорема механики положена в основу уравнений динамики машин?
6. Как записать кратчайшую форму уравнения динамики?
7. Какие существуют виды (режимы) движения машин?
8. Чем характеризуются пуск, остановка и установившийся режим работы машин?
В лекции «1.8 Направляющие косинусы вектора» также много полезной информации.
9. Что такое коэффициент неравномерности движения машины?
10. Как определяется средняя величина угловой скорости ведущего звена?
11. Для чего предназначен маховик в машине?
12. Какое допущение принято для приближённого определения момента инерции маховика?
13. В чём заключается кинематический и динамический эффект действия маховика?
14. Как определяется момент инерции маховика?
Момент силы. Условия равновесия рычага
- Устройство и виды рычагов
- Момент силы
- Правило моментов для двух сил
- Правило моментов для нескольких сил
- Применение рычагов в быту и технике
- Задачи
- Лабораторная работа №9. Проверка условия равновесия рычага
п.1. Устройство и виды рычагов
 |
Рычаг – это твёрдое тело, которое может вращаться вокруг неподвижной опоры.
Рычаг состоит из перекладины и опоры. Назначение рычага – получить выигрыш в силе или расстоянии. |
В зависимости от взаимного расположения точки опоры и нагрузки различают три вида рычагов.
п.2. Момент силы
Плечо силы – это кратчайшее расстояние между точкой опоры и прямой, вдоль которой сила действует на рычаг.
Чтобы найти плечо силы, нужно из точки опоры провести перпендикуляр на линию действия силы.

На рисунке (l_1) – плечо силы (F_1, l_2) — плечо силы (F_2).
Силы вращают рычаг вокруг точки опоры – по часовой или против часовой стрелки.
Ось вращения проходит через точку опоры перпендикулярно плоскости вращения.
На рисунке сила (F_1) вращает рычаг против часовой стрелки, а сила (F_2) — по часовой стрелке.
Момент силы – это произведение силы, вращающей тело, на её плечо. $$ M=Fl $$ В системе СИ единица измерения момента силы — Н·м.
Момент силы определяется не для всего тела, а для некоторой его точки, удалённой от центра (оси) вращения. Эта величина имеет смысл только для вращающихся тел.
п.3. Правило моментов для двух сил
Правило моментов для двух сил
Рычаг находится в равновесии под действием двух сил, если момент силы, вращающей его по ходу часовой стрелки, равен моменту силы, вращающей его против хода часовой стрелки.
 |
$$ F_1l_1=F_2l_2 $$ |
п.4. Правило моментов для нескольких сил
Правило моментов для нескольких сил
Рычаг находится в равновесии, если сумма моментов всех сил, вращающих его по ходу часовой стрелки, равен сумме моментов всех сил, вращающих его против хода часовой стрелки.
Например:
 |
Силы (F_1, F_2, F_3) вращают рычаг против часовой стрелки, а сила (F_4) — по часовой стрелке. Поэтому: $$ F_1l_1+F_2l_2+F_3l_3=F_4l_4 $$ |
п.5. Применение рычагов в быту и технике
Рычаги первого рода
 Весы Предмет, вес которого нужно измерить, — это нагрузка, а гиря создает усилие. Они равны, так как находятся на одном расстоянии от точки опоры. |
 Рычажные весы Точка опоры смещена относительно центра. Грузило передвигается по основанию, пока не уравновесит взвешиваемый объект. |
 Гвоздодёр Усилие ручки увеличивается плечом и вытаскивает гвоздь. Нагрузкой здесь является сопротивление гвоздя. |
 Ручная тележка Небольшое усилие, прикладываемое к ручкам тележки, позволяет поднимать тяжелый груз. |
 Плоскогубцы Составной рычаг, пара простых рычагов, соединенных в точке опоры. Нагрузка — сопротивление предмета захвату инструментом. |
 Ножницы Составной рычаг первого рода, развивают мощное режущее действие очень близко к месту крепления. Нагрузка — сопротивление материала лезвиям. |
Рычаги второго рода
Рычаги третьего рода
п.6. Задачи
Задача 1. Для каждого положения тела укажите плечо силы. 
При необходимости достраиваем линию действия силы и опускаем на неё перпендикуляр из точки опоры. Этот перпендикуляр и есть искомое плечо.
Задача 2. Грузы уравновешены на рычаге. Отношение плеч рычага 1:5. Масса большего груза 2,5 кг. Найдите массу меньшего груза.
Дано:
(frac{l_1}{l_2}=frac 15)
(m_1=2,5 text{кг})
__________________
(m_2-?)

По правилу моментов begin{gather*} F_1l_1=F_2l_2 end{gather*} На обоих концах рычага действуют силы тяжести: $$ F_1=m_1g, F_2=m_2g $$ Получаем: begin{gather*} m_1gl_1=m_2gl_2\[7pt] m_2=frac{m_1l_1}{l_2} end{gather*} Подставляем: $$ m_2=2,5cdot frac 15=0,5 (text{кг}) $$ Ответ: 0,5 кг
Задача 3. На концах рычага действуют силы 15 Н и 60 Н, направленные вниз. Рычаг находится в равновесии. Расстояние между точками приложения сил 1 м. Где расположена точка опоры?
Дано:
(F_1=15 text{Н})
(F_2=60 text{Н})
(l_1+l_2=1 text{м})
__________________
(l_1, l_2-?)

По правилу моментов begin{gather*} F_1l_1=F_2l_2. end{gather*} Получаем систему уравнений begin{gather*} left{ begin{array}{l l} 15l_1=60l_2 \ l_1+l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=4l_2 \ l_1+l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=4l_2 \ 4l_2+l_2=1 end{array} right. Rightarrow \[7pt] Rightarrow left{ begin{array}{l l} l_1=4l_2 \ 5l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=0,8 \ l_2=0,2 end{array} right. end{gather*} Ответ: 0,8 м от точки приложения первой силы и 0,2 м от точки приложения второй силы.
Задача 4*. К балке, расположенной на двух опорах А и В подвешен груз массой 500 кг. Расстояние от точки подвеса груза к одному из концов балки в 4 раза больше, чем к другому. С какой силой балка давит на каждую из опор? Примите (gapprox 10 text{м/с}^2). Ответ запишите в килоньютонах.
Дано:
(m=500 text{кг})
(gapprox 10 text{м/с}^2)
(OB=4OA)
__________________
(F_A, F_B-?)

Сила тяжести (F_{text{т}}=mg), направленная вниз, уравновешивается силами реакции опор (F_A) и (F_B), направленными вверх. begin{gather*} F_A+F_B=mg end{gather*} По правилу моментов при равновесии begin{gather*} F_Acdot OA=F_Bcdot OB=F_Bcdot 4OARightarrow F_A=4F_B \[7pt] F_A+F_B=5F_B=mgRightarrow F_B=frac{mg}{5} end{gather*} Получаем: begin{gather*} F_B=frac{500cdot 10}{5}=1000 text{Н}=1 text{кН}, F_A=4cdot 100=4000 text{Н}=4 text{кН} end{gather*} Ответ: 4 кН и 1 кН
п.7. Лабораторная работа №9. Проверка условия равновесия рычага
Цель работы
Исследовать условия равновесия рычага под действием двух параллельных сил.
Теоретические сведения
Рычаг – это твёрдое тело, которое может вращаться вокруг неподвижной опоры.
В работе используется рычаг 1-го рода, в котором опора располагается между точками приложения сил.
Плечо силы – это кратчайшее расстояние между точкой опоры и прямой, вдоль которой сила действует на рычаг. Чтобы найти плечо силы, нужно из точки опоры провести перпендикуляр на линию действия силы.
Момент силы – это произведение силы, вращающей тело, на её плечо: (M=Fl).
Правило моментов для двух сил
Рычаг находится в равновесии под действием двух сил, если момент силы, вращающей его по ходу часовой стрелки, равен моменту силы, вращающей его против хода часовой стрелки.
|
begin{gather*} M_1=M_2\[7pt] F_1l_1=F_2l_2 end{gather*} |
В работе используется лабораторный рычаг с отверстиями диаметром 4 мм, находящимися на расстоянии 5 см друг от друга. Отверстий нечетное количество; центральное отверстие (центр тяжести) используется для подвеса рычага на штативе в положении равновесия. Абсолютную погрешность определения плеча на данном рычаге принимаем равной половине диаметра отверстия $$ Delta l=frac D2=2 text{мм} $$
Для измерения веса груза используется динамометр с ценой деления $$ d=0,1 text{Н}. $$
Абсолютная погрешность определения веса $$ Delta_F=frac d2=0,05 text{Н}. $$
Относительные погрешности измерений: $$ delta_l=frac{Delta_l}{l}, delta_F=frac{Delta_F}{F}, delta_M=delta_l+delta_F $$
Абсолютная погрешность определения момента силы $$ Delta_M=Mcdot delta_M $$
Погрешности определения отношений сил и плечей: begin{gather*} r_F=frac{F_1}{F_2}, delta_{rF}=frac{Delta_F}{F_1}+frac{Delta_F}{F_2}, Delta_{rF}=frac{F_1}{F_2}cdot delta_{rF}\[7pt] r_l=frac{l_2}{l_1}, delta_{rF}=delta_{rl}frac{Delta_l}{l_1}+frac{Delta_l}{l_2}, Delta_{rl}=frac{l_2}{l_1}cdot delta_{rl} end{gather*}
Приборы и материалы
Лабораторный рычаг, штатив, стержень, динамометр, набор грузов.
Ход работы
1. Закрепите стержень в штативе, наденьте на него рычаг. Если стержень проходит через центральное отверстие рычага, он находится в равновесии.
2. Подвесьте три груза на динамометре, запишите их вес (F_1).
3. Подвесьте грузы слева от оси вращения рычага на расстоянии 5 см.
4. С помощью динамометра определите, какую силу нужно приложить на расстоянии 15 см справа от оси вращения, чтобы удерживать рычаг в равновесии.
5. Как направлены в этом случае силы, действующие на рычаг? Запишите длину плеч этих сил.
6. Найдите моменты сил (M_1) и (M_2), их относительные и абсолютные погрешности.
7. Вычислите отношение сил (frac{F_1}{F_2}) и плеч (frac{l_2}{l_1}) для этого случая, погрешности их определения.
8. Сделайте выводы.
Результаты измерений и вычислений
| (F_1, text{Н}) | (l_1, text{см}) | (F_2, text{Н}) | (l_2, text{см}) | (F_1/F_2) | (l_2/l_1) |
| 2,9 | 5 | 1,0 | 15 | 2,9 | 3,0 |
Погрешности прямых измерений: $$ Delta_l=2 text{мм}=0,2 text{см}, Delta_F=0,05 text{Н} $$ Найдем моменты сил и погрешности вычислений: begin{gather*} M_1=F_1cdot l_1=2,9cdot 5=14,5 (text{Н}cdot text{м})\[7pt] delta_{M1}=frac{Delta_l}{l_1}+frac{Delta_F}{F_1}=frac{0,2}{5}+frac{0,05}{2,9}approx 0,04+0,017=0,057=5,7text{%} \[7pt] Delta_{M1}=M_1cdot delta_{M1}=14,5cdot 0,057approx 0,8 (text{Н}cdot text{м})\[7pt] M_1=(14,5pm 0,8) text{Н}cdot text{м}\[7pt] \[7pt] M_2=F_2cdot l_2=1,0cdot 15=15,0 (text{Н}cdot text{м})\[7pt] delta_{M2}=frac{Delta_l}{l_2}+frac{Delta_F}{F_2}=frac{0,2}{15}+frac{0,05}{1,0}approx 0,013+0,05=0,063=6,3 text{%} \[7pt] Delta_{M2}=M_2cdot delta_{M2}=15,0cdot 0,063approx 0,9 (text{Н}cdot text{м})\[7pt] M_2=(15,0pm 0,9) text{Н}cdot text{м} end{gather*} Таким образом, с учетом вычисленных погрешностей: $$ M_1=M_2 $$
Погрешность вычислений для (frac{F_1}{F_2}) begin{gather*} delta_{rF}=frac{Delta_F}{F_1}+frac{Delta_F}{F_2}=frac{0,05}{2,9}+frac{0,05}{1,0}approx 0,017+0,05=0,067=6,7text{%}\[7pt] Delta_{rF}=frac{F_1}{F_2}cdot delta_{rF}=2,9cdot 0,067approx 0,2\[7pt] frac{F_1}{F_2}=2,9pm 0,2 end{gather*}
Погрешность вычислений для (frac{l_2}{l_1}) begin{gather*} delta_{rl}=frac{Delta_l}{l_1}+frac{Delta_l}{l_2}=frac{0,2}{5}+frac{0,2}{15}approx 0,04+0,013=0,053=5,3text{%}\[7pt] Delta_{rl}=frac{l_2}{l_1}cdot delta_{rl}=3,0cdot 0,053approx 0,2\[7pt] frac{l_2}{l_1}=3,0pm 0,2 end{gather*} Таким образом, с учетом вычисленных погрешностей: $$ frac{F_2}{F_2}=frac{l_2}{l_1} $$
Выводы
На основании проделанной работы можно сделать следующие выводы.
Моменты сил, приложенных слева и справа от оси вращения рычага, равны $$ M_1=(14,5pm 0,8) text{Н}cdot text{м}, M_2=(15,0pm 0,9) text{Н}cdot text{м} $$ Таким образом, с учетом вычисленных погрешностей, (M_1=M_2) — правило моментов выполняется.
Отношения сил и плечей равны begin{gather*} frac{F_1}{F_2}=2,9pm 0,2, frac{l_2}{l_1}=3,0pm 0,2 end{gather*}
Таким образом, с учетом вычисленных погрешностей (frac{F_1}{F_2}=frac{l_2}{l_1}) — правило отношений выполняется.
Эксперименты подтвердили условие равновесия рычага.