П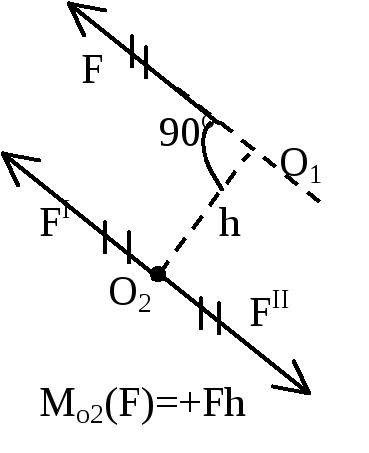 ара
ара
сил – система
двух равных по модулю, параллельных и
направленных в противоположные стороны
сил, действующих на абсолютно твердое
тело. Действие пары сил на твердое тело
сводится к некоторому вращательному
эффекту, который характеризуется
величиной – момент пары. Он определяется:
Его
модулем = F*d.
d
– расстояние между линиями действия
сил пары, называется плечом пары.
Положением в
пространстве плоскости действия пары.
Направлением
поворота пары в этой плоскости.
Момент
пары сил –
вектор
m(или
M),
модуль которого равен произведению
модуля одной из сил пары, на ее плечо, и
который направлен перпендикулярно
плоскости действия пары в ту сторону,
откуда пара видна стремящейся повернуть
тело против хода часовой стрелки.

Две пары, лежащие
в || плоскостях и имеющие одинаковый
момент эквивалентны.
Все
пары в пересекающихся плоскостях можно
заменить одной парой с моментом, равным
сумме моментов этих пар. Для
абсолютно твердого тела пара
– свободный вектор, определяемы только
моментом. Момент перпендикулярен
плоскости образуемой парой.
Пару можно заменить
параллельной ей равной силе и парой с
моментом, равным произведению этой силы
на расстояние до новой точки приложения.
Теоремы
о парах.
1) Две пары, лежащие в одной плоскости,
можно заменить одной парой, лежащей в
той же плоскости, с моментом, равным
сумме моментов данных двух пар.
![]() .
.
2) Две пары, имеющие геометрически равные
моменты, эквиваленты. 3) Не нарушая
состояния твердого тела, пару сил можно
переносить в плоскости ее действия.
Т.е. момент пары сил является свободным
вектором. 4) Система нескольких пар сил
эквивалента одной паре, момент которой
равен векторной сумме моментов данных
пар. Т.е. система пар приводится к одной
паре, момент которой равен сумме моментов
всех пар. Условие равновесия пар сил:
![]() – геометрическая сумма их моментов
– геометрическая сумма их моментов
равна 0. Пары сил, расположенные в одной
плоскости, взаимно уравновеш-тся, если
алгебраическая сумма их моментовМi=0.
М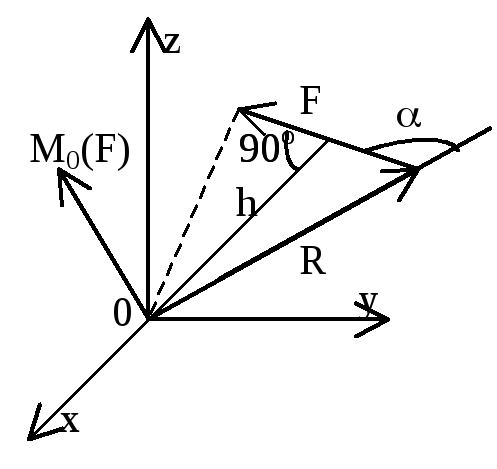 омент
омент
силы относительно точки
– вектор,
численно равный произведению модуля
силы на плечо и направленный перпендикулярно
плоскости, содержащей силу и точку, в
такую сторону, чтобы смотря ему навстречу,
видеть силу стремящейся повернуться
против хода час.стрелки. Плечо «h»–
кратчайшее расстояние от точки до линии
действия силы.
![]()
![]()
– момент силы равен векторному
произведению вектора
![]()
на вектор
![]() .
.
Модуль векторного произведения:
![]() RFsin=
RFsin=
Fh.
Для плоской сист. сил обычно находят не
вектор момента, а только его модуль:
![]() Fh,
Fh,
>0 – против час.стр.; <0 – по час.стр.
Свойства момента силы: 1) момент силы не
изменяется при переносе точки приложения
силы вдоль ее линии действия; 2) момент
силы относит. точки =0 только тогда, когда
сила =0 или когда линия действия силы
проходит через точку (т.е. плечо =0). Если
x,y,z
– координаты точки приложения силы,
Fx,
Fy,
Fz
– проекции силы на оси координат и точка
0 – начало координат, то
 =(yFz
=(yFz
– zFy)![]() +(zFx
+(zFx
– xFz)![]() +(xFy
+(xFy
– yFx)![]() ,
,
откуда проекции момента силы на оси
коорд.: М0x(![]() )=yFz
)=yFz
– zFy;
М0y(![]() )=zFx
)=zFx
– xFz;
М0z(![]() )=xFy
)=xFy
– yFx.
Г лавный
лавный
вектор –
векторная сумма всех сил, приложенных
к телу. Главный
момент
относительно центра –векторная сумма
моментов всех сил, приложенных к телу
относительно того же центра.
Т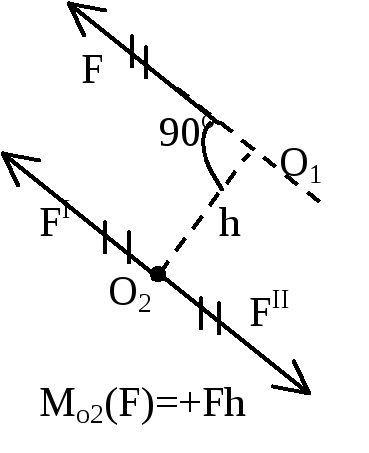 еорема
еорема
(лемма) о параллельном переносе силы:
сила приложенная в какой-либо точке
тверд. тела, эквивалента такой же силе,
приложенной в любой др. точке этого
тела, и паре сил, момент которой равен
моменту данной силы относительно новой
точки приложения.
Соседние файлы в предмете Теоретическая механика
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Содержание:
- Теория пар сил
- Силы, направленные в одну сторону
- Силы направлены в противоположные стороны и различные по модулю
- Пара сил и ее момент
- Эквивалентность пары сил
- Добавление пар сил
- Условия равновесия пар сил
- Момент силы относительно точки на оси. Момент пары сил
- Момент силы относительно точки
- Теорема о моменте равнодействующей системы сходящихся сил
- Момент сил относительно оси
- Момент пары сил и его свойства
Парой сил называется система двух равных по модулю, противоположных по направлению параллельных сил.
На странице -> решение задач по теоретической механике собраны решения задач и заданий с решёнными примерами по всем темам теоретической механики.
Теория пар сил
Пару сил в механике рассматривают как одно из основных понятий наряду с понятием силы.
Парой сил называют систему двух равных по модулю параллельных сил, направленных в противоположные стороны. Пара сил не составляет системы сил, эквивалентной нулю. Пару сил нельзя заменить одной силой, и, следовательно, она не имеет равнодействующей, а является такой системой сил, упростить которую нельзя. Каждая из сил, входящих в состав пары сил, имеет свойства обычных сил.
Пара сил, действующая на твердое тело, характеризуется, прежде всего, плоскостью действия. Плоскостью действия пары сил называют плоскость, в которой расположены силы пары.
Силы, направленные в одну сторону
Пусть в абсолютно твердого тела в точках А и В приложены две параллельные силы и
и  направленные в одну сторону
направленные в одну сторону  (рис. 4.1). Найдем их равнодействующую. Для этого в точках А и В к телу приложим две равные по величине и противоположные по направлению силы
(рис. 4.1). Найдем их равнодействующую. Для этого в точках А и В к телу приложим две равные по величине и противоположные по направлению силы  и
и , действующих по прямой АВ.
, действующих по прямой АВ.

Поскольку  , то согласно первой аксиомой статики
, то согласно первой аксиомой статики  , а согласно второй аксиомой
, а согласно второй аксиомой  . Добавляя попарно силы
. Добавляя попарно силы  и
и  ,
,  и
и  , используя аксиому параллелограмма сил, получим:
, используя аксиому параллелограмма сил, получим:
 то есть
то есть 
 то есть
то есть 
Итак, 
Силы  и
и  не является параллельными лежат в одной плоскости, поэтому их линии
не является параллельными лежат в одной плоскости, поэтому их линии
действия имеют точку пересечения А. Перенесем силы  и
и  вдоль их линий действия в эту точку. Получим силы
вдоль их линий действия в эту точку. Получим силы 
Сила — скользящий вектор, поэтому  Разложим теперь силу
Разложим теперь силу  на составляющие
на составляющие  , а силу
, а силу  — на составляющие
— на составляющие  так, чтобы:
так, чтобы:

Получим:

Поскольку силы  и
и  направлены по одной прямой в одну сторону, то их равнодействующая
направлены по одной прямой в одну сторону, то их равнодействующая  cпрямована по той же прямой в том же направлении и ее величина равна сумме этих сил, то есть
cпрямована по той же прямой в том же направлении и ее величина равна сумме этих сил, то есть  Учитывая (4.1), запишем
Учитывая (4.1), запишем  Перенесем силу
Перенесем силу  вдоль линии ее действия в точку С отрезка АВ. Получим силу
вдоль линии ее действия в точку С отрезка АВ. Получим силу  Это означает, что сила
Это означает, что сила  — равнодействующая сил
— равнодействующая сил 

Найдем точку приложения равнодействующей  сил
сил  и
и  . С сходства одинаково заштрихованных треугольников запишем:
. С сходства одинаково заштрихованных треугольников запишем:
 и
и 
Поскольку , то
, то , откуда, учитывая свойство пропорции, имеем
, откуда, учитывая свойство пропорции, имеем

Итак, равнодействующая двух параллельных сил, направленных в одну сторону, параллельна этих сил, направленная в ту же сторону, что и составляющие силы; модуль
равнодействующей равна сумме модулей составляющих сил, а линия ее действия разделяет расстояние между точками приложения этих сил внутри на части, обратно
пропорциональны величинам этих сил.
Из изложенного следует, что произвольную силу можно разложить на две параллельные силы. Если  то
то 
Силы направлены в противоположные стороны и различные по модулю
Пусть параллельные силы  и
и  направлены в разные стороны
направлены в разные стороны  и
и  (рис. 4.2).
(рис. 4.2).

Найдем равнодействующую сил  и
и  Для этого разложим силу
Для этого разложим силу  на две параллельные силы:
на две параллельные силы:  , прилагаемую в точке В, принимая
, прилагаемую в точке В, принимая  и
и  , прилагаемую в точке С. Сила
, прилагаемую в точке С. Сила  является равнодействующей сил
является равнодействующей сил  и
и  поэтому
поэтому 

Согласно (4.3),  откуда
откуда
Поскольку  Но
Но  поэтому
поэтому  Следовательно, сила
Следовательно, сила  — равнодействующая сил
— равнодействующая сил  Из формулы (4.4) получим
Из формулы (4.4) получим 
Равнодействующая двух параллельных, разных по модулю, противоположно направленных сил параллельная им и направлена в сторону большей силы; модуль равнодействующей равна разности модулей составляющих сил. Линия действия равнодействующей  проходит через точку, лежащую вне отрезка АВ со стороны большей силы и разделяет расстояние между точками приложения сил внешне на отрезки, обратно пропорциональны величинам этих сил.
проходит через точку, лежащую вне отрезка АВ со стороны большей силы и разделяет расстояние между точками приложения сил внешне на отрезки, обратно пропорциональны величинам этих сил.
Пара сил и ее момент
Система двух равных по модулю, параллельных, противоположно направленных сил, линии действия которых не совпадают, называется парой сил.
Пусть к некоторому абсолютно твердого тела приложена пара сил  (Рис. 4.3, а).
(Рис. 4.3, а).
Согласно определению пары сил: 
Элементами пары есть силы, составляющие пару, плечо пары, плоскость действия пары.
Плечо пары — это кратчайшее расстояние между линиями действия сил пары, то есть длина перпендикуляра h, опущенного из любой точки линии действия одной из сил пары на линию действия второй силы (рис. 4.3, а). Поскольку сила -скользящий вектор, то силы в паре всегда можно разместить так, чтобы расстояние АВ между точками их приложения было плечом пары (Рис. 4.3, б).

Плоскость действия пары — это плоскость, в которой размещены силы пара. Она единственная, поскольку через две параллельные линии можно провести только одну
плоскость.
Как будет показано в § 5.3, пара сил не имеет равнодействующей.
Пара сил не является системой уравновешенных сил, ибо в первой аксиомой статики две равные по модулю и противоположны по направлению силы будут уравновешенной системой сил только тогда, когда имеют общую линию действия. Силы, составляющих пару, не имеют общей линии действия.
Пара сил, действующая на тело, пытается вращать его. По мере вращательного действия силы в статике, как известно, является момент. Следовательно, и действие пары сил на тело должна характеризоваться моментом. Докажем это с помощью следующей теоремы.
Теорема 4.1. Векторная сумма моментов сил пары относительно произвольного центра
(Точки) в пространстве является величиной постоянной для данной пары.

Доказательство. Пусть задано пару сил плечо которой h (рис. 4.4). Поскольку
плечо которой h (рис. 4.4). Поскольку
действие пары на тело характеризуется вращательным эффектом, найдем сумму моментов сил пары относительно центра О, произвольно расположенного в пространстве.
Получим:
где  — радиусы-векторы точек приложения сил
— радиусы-векторы точек приложения сил  и
и  относительно центра О. С учетом формул (4.7) равенство (4.8) запишется так:
относительно центра О. С учетом формул (4.7) равенство (4.8) запишется так:

Здесь  — радиус-вектор точки А, в которой приложено силу
— радиус-вектор точки А, в которой приложено силу  пары, относительно центра В, а потому
пары, относительно центра В, а потому Итак,
Итак,
Известно, что вектор  перпендикулярен плоскости векторов
перпендикулярен плоскости векторов  и
и  , а его модуль
, а его модуль 
Аналогично, учитывая, что  , получим
, получим 
где вектор  перпендикулярен плоскости векторов
перпендикулярен плоскости векторов  и
и  , а модуль этого вектора
, а модуль этого вектора 
Следовательно, сумма моментов сил пары относительно произвольного центра в пространстве не зависит от выбора этого центра и равен моменту одной из сил пары относительно точки приложения другой силы. Теорема доказана.
Эта сумма моментов характеризует вращательное действие пары сил на тело. Назовем ее вектор-моментом пары сил. Обозначим вектор-момент пары сил  или просто
или просто . Итак, вектор-момент пары сил
. Итак, вектор-момент пары сил  равен векторному моменту одной силы пары относительно точки приложения другой силы данной пары, то есть
равен векторному моменту одной силы пары относительно точки приложения другой силы данной пары, то есть

С доказательства теоремы следует, что момент пары сил является вектором. Определим его величину и направление.
Величина момента пары по формулам (4.10) — (4.14) равна произведения величины одной из сил пары на плечо пары: 
Вектор-момент пары сил направляется перпендикулярно к плоскости действия пары так, чтобы с его конца было видно попытки пары сил вращать тело против часовой стрелки (рис. 4.4).
Если на тело действует система пары сил, расположенных в одной плоскости, то вектор-моменты всех пар сил системы перпендикулярны этой плоскости. Итак, вектор-моменты такой системы пар является системой параллельных векторов, для составления которых достаточно знать их величины и знаки. Поэтому целесообразно ввести понятие алгебраического момента пары сил.
Алгебраическим моментом пары сил называется взятый со знаком «+» или «-» произведение одной из сил пары на плечо пары: 
Алгебраический момент пары сил считаем положительным, если пара сил пытается вращать тело против часовой стрелки (рис. 4.5, а) и отрицательным, если пара сил пытается вращать тело по часовой стрелке (рис. 4.5, б). Алгебраические моменты пар сил на рисунках показывают дуговыми стрелками.

Эквивалентность пары сил
Рассмотрим теоремы, из которых вытекают основные свойства пары сил, которые предоставят нам возможность выполнять определенные действия над ними.
Теорема 4.2. Действие пары сил на тело не изменится при произвольном переносе этой пары в плоскости ее действия.
Доказательство. Пусть к некоторому телу приложена пара сил  плечо которой АВ = h и расположенной в плоскости П (рис. 4.6). Возьмем произвольную точку С в плоскости П и отложим от нее под произвольным углом отрезок СD = h (рис. 4.7). В точках С и D приложим к телу две системы уравновешенных сил
плечо которой АВ = h и расположенной в плоскости П (рис. 4.6). Возьмем произвольную точку С в плоскости П и отложим от нее под произвольным углом отрезок СD = h (рис. 4.7). В точках С и D приложим к телу две системы уравновешенных сил и
и  размещенных в плоскости П, линии действия которых параллельны.
размещенных в плоскости П, линии действия которых параллельны.


Силы выбираем так, чтобы
Согласно второй аксиомой статики
Перенесем силы  и силы
и силы вдоль линий их действия в точки пересечения
вдоль линий их действия в точки пересечения  (рис. 4.7). Пользуясь аксиомой параллелограмма сил, заменим системы сил
(рис. 4.7). Пользуясь аксиомой параллелограмма сил, заменим системы сил  и
и  из них равнодействующими
из них равнодействующими и
и 

Учитывая формулы (4.7) и (4.17), получим 
Поскольку фигура  является ромбом, то
является ромбом, то — биссектриса углов
— биссектриса углов
и  Согласно с равенством (4.19) параллелограммы, построенные на силах
Согласно с равенством (4.19) параллелограммы, построенные на силах  и
и  — также ромбы. Поэтому их диагонали
— также ромбы. Поэтому их диагонали  и
и  является биссектрисами указанных углов, потому что две стороны каждого из этих ромбов совпадают со сторонами ромба
является биссектрисами указанных углов, потому что две стороны каждого из этих ромбов совпадают со сторонами ромба  Отсюда следует, что силы
Отсюда следует, что силы  и
и  имеют одну линию действия, которая совпадает с диагональю
имеют одну линию действия, которая совпадает с диагональю  Учитывая формулу (4.20) и первую аксиому статики, делаем вывод, что силы
Учитывая формулу (4.20) и первую аксиому статики, делаем вывод, что силы  и
и  уравновешиваются. Итак, система сил
уравновешиваются. Итак, система сил и ее можно отбросить, то есть
и ее можно отбросить, то есть 
Это означает согласно формуле (4.18), заданной паре сил  эквивалентна паре сил
эквивалентна паре сил  .
.
Покажем, что величина и направление векторов-моментов пар сил  и
и  совпадают. Действительно, величина момента заданной пары сил
совпадают. Действительно, величина момента заданной пары сил а знак (как видно из рис. 4.6) — положительный. Величина момента эквивалентной пары с учетом равенств (4.17).
а знак (как видно из рис. 4.6) — положительный. Величина момента эквивалентной пары с учетом равенств (4.17). 

Из рис. 4.8 видно, что знак момента  также положительный, то есть
также положительный, то есть Следовательно, можно считать, что полученная пара сил
Следовательно, можно считать, что полученная пара сил  не что иное, как пара сил
не что иное, как пара сил  которая перенесена из исходного положения ее плеча АВ в положение плеча СD, и этот перенос не изменил кинематического состояния тела. Теорема доказана.
которая перенесена из исходного положения ее плеча АВ в положение плеча СD, и этот перенос не изменил кинематического состояния тела. Теорема доказана.
Теорема 4.3. Действие пары сил на твердое тело не изменится, если перенести эту пару в плоскость, параллельную плоскости ее действия.
Доказательство. Пусть на некоторое твердое тело действует пара сил  с плечом АВ = h, которая размещена в плоскости
с плечом АВ = h, которая размещена в плоскости  (рис. 4.9, а).
(рис. 4.9, а).
Выберем в теле плоскость  параллельную плоскости
параллельную плоскости  . В плоскости
. В плоскости  возьмем точки С и D так, чтобы
возьмем точки С и D так, чтобы  и
и 
Приложим к телу в точках С и D две системы уравновешенных сил  линии действия которых параллельны. Эти силы размещены в плоскости
линии действия которых параллельны. Эти силы размещены в плоскости  и удовлетворяют условию (4.17), а следовательно,
и удовлетворяют условию (4.17), а следовательно,

Проведем отрезки АС и ВD, точкой пересечения которых есть точка А.
Поскольку  и
и  то ABCD — параллелограмм с диагоналями АС и BD, а потому
то ABCD — параллелограмм с диагоналями АС и BD, а потому 
Добавим попарно силы  и
и  ,
,  и
и  Они параллельны и равны по модулю, поэтому их равнодействующая
Они параллельны и равны по модулю, поэтому их равнодействующая  и
и  будут приложены в точке О пересечения диагоналей параллелограмма АВСD (рис. 4.9, б).
будут приложены в точке О пересечения диагоналей параллелограмма АВСD (рис. 4.9, б).

Равнодействующая силы  и
и  равны по модулю и направлены в противоположные
равны по модулю и направлены в противоположные
стороны. Итак, система сил  уравновешена, то есть
уравновешена, то есть

и можно записать 
Сравнивая соотношения (4.21) и (4.22), получим 
 Это означает, что воздействие на тело пар сил
Это означает, что воздействие на тело пар сил  и
и  одинакова. Легко показать, что вектор-моменты этих пар сил равны. Действительно, учитывая формулу (4.17), имеем:
одинакова. Легко показать, что вектор-моменты этих пар сил равны. Действительно, учитывая формулу (4.17), имеем:

Вектор-моменты и
и  направлены перпендикулярно плоскостям
направлены перпендикулярно плоскостям  и
и  в одно и ту же сторону. Таким образом,
в одно и ту же сторону. Таким образом, , а следовательно,
, а следовательно,  .
.
Теорема доказана.
Теорема 4.4. Действие пары на тело не изменится, если изменить силы и плечо пары, оставляя неизменным ее вектор-момент.
Доказательство. Пусть к телу приложена пара сил  с плечом АВ = h, размещена в плоскости П (рис. 4.10).
с плечом АВ = h, размещена в плоскости П (рис. 4.10).
Приложим к телу в точках А и В две силы  , действующих по прямой АВ. Это означает, что
, действующих по прямой АВ. Это означает, что  , а
, а 
За аксиомой параллелограмма сил найдем равнодействующие систем сил  и
и 


Учитывая, что  и
и  получим
получим 
Итак,  . Это означает, что линии действия сил
. Это означает, что линии действия сил  и
и  параллельные, то есть
параллельные, то есть
силы ,
, образуют пару сил, которая лежит в плоскости П. Итак, учитывая формулу (4.23), получим
образуют пару сил, которая лежит в плоскости П. Итак, учитывая формулу (4.23), получим 
Плечо новой пары  Величина момента заданной пары сил,
Величина момента заданной пары сил,  а полученной пары
а полученной пары  Из рис. 4.10
Из рис. 4.10
видно, что поскольку  находим
находим  , а с
, а с  получаем
получаем  Тогда
Тогда  или
или  Очевидно, что знаки моментов
Очевидно, что знаки моментов  и
и  также совпадают. Итак, изменив силу и плечо заданной пары сил, оставив неизменным ее вектор-момент, получили эквивалентную пару сил. Теорема доказана.
также совпадают. Итак, изменив силу и плечо заданной пары сил, оставив неизменным ее вектор-момент, получили эквивалентную пару сил. Теорема доказана.
Из доказанных теорем следует:
1) пары эквивалентны, если равны их векторы-моменты;
2) вектор-момент пары сил является вектором свободным. Это означает, что его можно приложить в произвольной точке твердого тела.
Сформулированы три теоремы можно объединить в одну теорему: пары сил являются эквивалентными, если равны их векторы-моменты.
Из всего сказанного можно сделать вывод, что вектор-момент пары сил является полной характеристикой статическому воздействию пары на твердое тело. Поэтому действия над парами сил можно заменить эквивалентными операциями над их векторами-моментами.
Добавление пар сил
1. Геометрическое определение момента результирующей пары сил
Установим правило сложения пар сил, лежащих в плоскостях, которые пересекаются. Это правило вытекает из следующей теоремы.
Теорема 4.5. Две пары сил, которые лежат в плоскостях, пересекающихся эквивалентны одной паре, вектор-момент которой равен геометрической сумме векторов-моментов данных пар.
Доказательство. Пусть пары сил и
и  размещены соответственно в плоскостях П1 и П2, пересекающихся (рис. 4.11).
размещены соответственно в плоскостях П1 и П2, пересекающихся (рис. 4.11).
Пользуясь теоремой 4.4, приведем обе пары к плечу АВ, размещенного на линии пересечения плоскостей П1 и П2 , то есть 
При этом должны выполняться равенства
 и
и 

Добавим согласно аксиоме параллелограмма силы, приложенные в точках А и В. Получим  и
и  . Принимая во внимание, что
. Принимая во внимание, что  и
и  будем иметь
будем иметь  . Итак, система пар
. Итак, система пар и
и  эквивалентна одной паре
эквивалентна одной паре  Найдем вектор — момент этой пары:
Найдем вектор — момент этой пары:

Теорема доказана.
Аналогично можно добавить n пар сил в пространстве. В результате получим одну пару сил, вектор-момент которой равен векторной сумме векторивмоментив составляющих пар сил, а именно:
2. Аналитическое определение момента результирующей пары сил
Спроектируем равенство (4.25) на оси прямоугольной декартовой системы координат и используем теорему о проекции суммарного вектора на ось. Получим проекции момента результирующей пары сил на оси координат:

где  , — проекции вектора момента результирующей пары
, — проекции вектора момента результирующей пары  на соответствующие оси координат;
на соответствующие оси координат;  , — проекции вектора момента
, — проекции вектора момента 
и-й пары на оси выбранной системы координат.
Тогда величина вектора момента пары 
а направление его найдем по формулам: 
Известно (§ 4.2), что вектор-моменты пар, размещенных в одной плоскости, есть коллинеарными и поэтому добавляются алгебраически. Итак, момент результирующей
пары плоской системы пар равна сумме алгебраических моментов составляющих пар

Условия равновесия пар сил
1. Геометрическое условие равновесия пространственной системы пар сил
Пусть на тело действует n пар сил, произвольно расположенных в пространстве, вектори-моменты которых равны 
В § 4.4 было доказано, что такая система пар сил эквивалентна одной паре сил, вектор-момент которой определяется формулой (4.25). очевидно, что тело под действием системы пар сил остается в равновесии, если вектор-момент результирующей пары будет равняться нулю 
Это условие равновесия, учитывая формулу (4.25), запишем в виде 
Формула (4.29) является геометрической условием равновесия пространственной системы пар, которую можно сформулировать так: пространственная система пар сил будет
находиться в равновесии тогда и только тогда, когда вектор-момент результирующей пары или геометрическая сумма векторов-моментов составляющих пар будет равняться нулю.
2. Аналитические условия равновесия пространственной системы пар сил
Из условия (4.29), учитывая формулу (4.26), получаем, что в случае равновесия пространственной системы пар сил то есть 
Формулы (4.30) являются аналитическими условиями равновесия пространственной системы пар сил, которые формулируются так: пространственная система пар сил будет
находиться в равновесии тогда и только тогда, когда алгебраические суммы проекций
векторов-моментов составляющих пар на три взаимно перпендикулярные оси координат будут равны нулю.
3. Условие равновесия плоской системы пар сил
Условие равновесия плоской системы пар сил получаем из равенства (4.28).
Плоская система пар сил будет находиться в равновесии тогда и только тогда, когда сумма алгебраических моментов составляющих пар сил будет равняться нулю:

Условие равновесия плоской системы пар можно получить также из условий равновесия (4.30).
Действительно, пусть система пар сил размещена в координатной плоскости  . Тогда вектор-моменты всех пар сил данной системы перпендикулярны плоскости
. Тогда вектор-моменты всех пар сил данной системы перпендикулярны плоскости  , то есть
, то есть  или
или  . Отсюда получим такое условие равновесия
. Отсюда получим такое условие равновесия

Поскольку  , то условия равновесия (4.32) и (4.31) эквивалентны для системы пар сил, расположенных в плоскости
, то условия равновесия (4.32) и (4.31) эквивалентны для системы пар сил, расположенных в плоскости  .
.
Момент силы относительно точки на оси. Момент пары сил
Парой сил называется система двух сил, равных по модулю, параллельных и направленных в разные стороны, приложенных к телу в двух разных точках.
Момент силы относительно точки
Моментом силы  относительно точки
относительно точки  (Центра) (рис. 2.1) называется вектор, который равен векторному произведению радиуса- вектора
(Центра) (рис. 2.1) называется вектор, который равен векторному произведению радиуса- вектора  , проведенного из центра в точку
, проведенного из центра в точку  приложения силы, на вектор
приложения силы, на вектор 
 (2.1)
(2.1)
Модуль этого векторного произведения:
 (2.2)
(2.2)
Опустим перпендикуляр из точки на линию действия силы  . Длину этого перпендикуляра
. Длину этого перпендикуляра  назовем плечом силы
назовем плечом силы относительно точки . Тогда (2.2) запишем в виде:
относительно точки . Тогда (2.2) запишем в виде:
 (2.3)
(2.3)
Итак, момент силы относительно центра численно равен произведению модуля силы на
плечо, и направленный перпендикулярно к плоскости, проходящей через точку и линию действия силы, в ту сторону, откуда «вращение» тела под действием силы вокруг точки (или самый короткий поворот вектора  направлению вектора
направлению вектора  ) видит наблюдатель, находящийся на конце вектора-момента, таким, что происходит против часовой стрелки (рис 2.2).
) видит наблюдатель, находящийся на конце вектора-момента, таким, что происходит против часовой стрелки (рис 2.2).

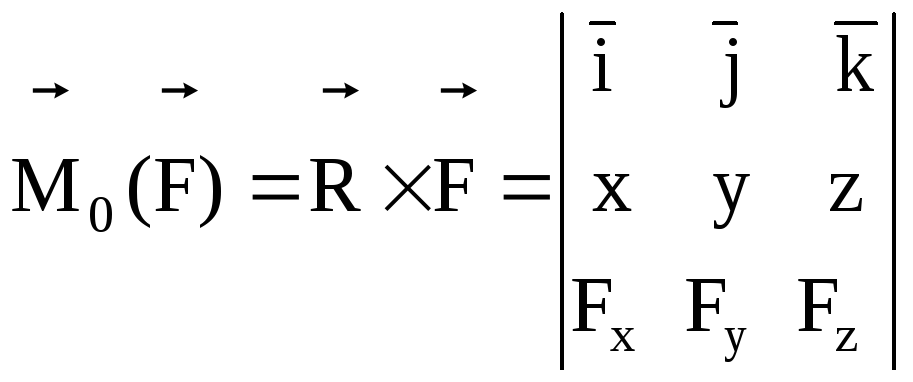
Очевидно, момент силы относительно точки имеет все свойства векторного произведения. Из формулы (2.1) можно найти проекции вектора  на координатные оси. Как известно из векторной алгебры,
на координатные оси. Как известно из векторной алгебры,
 (2.4)
(2.4)
Раскрывая этот определитель по элементам первой строки и раскладывая вектор  на составляющие
на составляющие 
 на осях координат, получим
на осях координат, получим
 (2.5)
(2.5)
Сравнивая левую и правую части равенства (2.5), имеем
 (2.6)
(2.6)
Модуль, и направление момента силы относительно точки можно определить еще и так:

Заметим, что формулы (2.6) легко получить, пользуясь правилом циклической
перестановки индексов. 
По определению момента силы относительно точки имеем:
1) если переместить силу вдоль линии ее действия, то момент силы относительно точки не изменится;
2) момент силы относительно точки всегда равен нулю, когда линия действия силы проходит через эту точку (в этом случае плече  равно нулю),
равно нулю),
3) момент силы относительно точки численно равен удвоенной площади треугольника  (Рис. 2.3), построенного на силе
(Рис. 2.3), построенного на силе  и центре момента (О).
и центре момента (О).
Теорема о моменте равнодействующей системы сходящихся сил
Теорема Вариньона. Момент равнодействующей сходящейся системы сил относительно произвольного центра равен векторной (геометрической) сумме моментов составляющих сил относительно того самого центра:
 (2.8)
(2.8)
Доказательство. Пусть в точке А пересекаются линии действия системы сходящихся сил
 (рис. 2.4, а). Обозначим через
(рис. 2.4, а). Обозначим через  радиус-вектор, проведенный из точки О в точку А. Равнодействующую
радиус-вектор, проведенный из точки О в точку А. Равнодействующую заданной системы найдем, построив многоугольник сил
заданной системы найдем, построив многоугольник сил
 (рис. 2.4, б). Тогда по определению момента силы относительно точки О
(рис. 2.4, б). Тогда по определению момента силы относительно точки О
получим:
 (2.9)
(2.9)
что и требовалось доказать.

Если силы и точка О размещены в одной плоскости, то их моменты перпендикулярны этой плоскости и лежат на одной прямой. Поэтому момент равнодействующей такой системы сил равен алгебраической сумме моментов составляющих сил относительно этой
точки.
Момент сил относительно оси
Моментом силы относительно оси называется проекция на эту ось момента силы относительно любой точки, лежащей на этой оси (рис. 2.5).
Из этого определения следует, что моменты сил относительно координатных осей вычисляются по формулам (2.6). Эти формулы, в частности, показывают, что момент силы
относительно оси не зависит от выбора точки на оси.
При решении конкретных задач моменты сил относительно осей удобно вычислять более наглядным способом (рис. 2.6) по следующему правилу.
1. Проводим произвольную плоскость  перпендикулярную оси
перпендикулярную оси  и находим точку
и находим точку 
пересечения этой плоскости с осью.
2. Проектируем силу  на указанную плоскость.
на указанную плоскость.
3. Вычисляем момент проекции  , силы
, силы на эту плоскость относительно точки О:
на эту плоскость относительно точки О:

При этом момент силы относительно оси считается положительным, если наблюдатель видит со стороны положительного направления оси  , что сила
, что сила  пытается повернуть тело вокруг оси против часовой стрелки.
пытается повернуть тело вокруг оси против часовой стрелки.
Как видно из рис. 2.6, численное значение момента силы относительно оси можно выразить удвоенной площадью треугольника  который лежит в плоскости
который лежит в плоскости 


Из определения момента силы относительно оси следует, что он равен нулю, если линия действия силы и ось лежат в одной плоскости.
Пример 1. Сила  приложена в точке А с координатами (2; 3,4) и составляет
приложена в точке А с координатами (2; 3,4) и составляет
с осью  угол
угол  , с осью
, с осью  — угол
— угол  , а с осью
, а с осью  — угол
— угол  . При этом
. При этом
Вычислить момент этой силы относительно оси 
Решение.
По формулам (2.6), есть
 для определения
для определения  предварительно нужно найти
предварительно нужно найти 
Известно, что  откуда
откуда 
или 
Если  то
то  Тогда,
Тогда, 

Если  то
то  Тогда,
Тогда, 

Момент пары сил и его свойства
Парой сил называется система двух равных по величине сил  . параллельных между собой, что направлены в противоположные стороны вдоль несовпадающих линий действия и приложенные к одному телу (рис. 2.7, а). Плоскость
. параллельных между собой, что направлены в противоположные стороны вдоль несовпадающих линий действия и приложенные к одному телу (рис. 2.7, а). Плоскость  называется плоскостью действия пары сил, или плоскостью пары. Плечом пары
называется плоскостью действия пары сил, или плоскостью пары. Плечом пары  называется самое короткое расстояние между линиями действия сил пары.
называется самое короткое расстояние между линиями действия сил пары.
Определим, чему равна сумма моментов сил, составляющих пар относительно произвольной точки.
Пусть О — произвольная точка пространства (Рис. 2.7, б), a  — силы, составляющие пару и приложенные соответственно в точках А и В. Пусть
— силы, составляющие пару и приложенные соответственно в точках А и В. Пусть  Из определения момента силы относительно точки имеем:
Из определения момента силы относительно точки имеем:
 (2.10)
(2.10)
Полученная векторная сумма не зависит от положение точки  , в отношении которой вычисляются моменты, а определяется лишь точками приложения сил, составляющих пару.
, в отношении которой вычисляются моменты, а определяется лишь точками приложения сил, составляющих пару.
Векторное произведение называется моментом пары сил
называется моментом пары сил  и обозначается
и обозначается
 Модуль момента пары сил равен произведению модуля одной из сил пары на
Модуль момента пары сил равен произведению модуля одной из сил пары на
плечо пары.
Как видим, момент пары направленный перпендикулярно к плоскости действия пары в ту
сторону, откуда «вращение» пары происходит против часовой стрелки.

Итак, момент пары сил — вектор свободный и математически определен в виде
 (2.11)
(2.11)
Ниже показано, что момент пары полностью определяет статическое действие пары сил на твердое тело, то есть полной характеристикой механического воздействия пары сил на это тело. Из определения момента пары сил и аксиомы I о двух силах следует, что пара сил является уравновешенной системой (система сил, эквивалентная нулю) тогда и только тогда, когда момент пары равна нулю. Другие свойства пары сил определяются следующими теоремами.
Теорема 1. Не меняя действия пары сил на твердое тело, его можно переносить и произвольно вращать в плоскости действия, изменяя величину силы, входящей в нее, и длину плеча так, чтобы момент пары оставался неизменным.
Доказательство. Пусть задано пару сил и
и  с плечом
с плечом  . В плоскости действия этой пары выберем произвольный отрезок
. В плоскости действия этой пары выберем произвольный отрезок  (рис. 2.8, а). В точках с и d этого отрезка
(рис. 2.8, а). В точках с и d этого отрезка
на линиях, перпендикулярные к нему, приложим соответственно две системы сил
 и
и  каждая из которых эквивалентна нулю. Причем
каждая из которых эквивалентна нулю. Причем  Продолжим линии действия сил и к пересечению их с линиями действия
Продолжим линии действия сил и к пересечению их с линиями действия  и
и  сил Полученные точки пересечения обозначим через
сил Полученные точки пересечения обозначим через 
Перенесем теперь силы и а также силы  и
и  как скользящие векторы в точки
как скользящие векторы в точки  и
и  Пусть
Пусть  — равнодействующая сходящихся сил
— равнодействующая сходящихся сил и
и  , приложенных в точке, а
, приложенных в точке, а  равнодействующая сходящихся сил
равнодействующая сходящихся сил  и
и  приложенных в точке
приложенных в точке  Понятно, что система сил
Понятно, что система сил  эквивалентна нулю, поскольку по построению силы
эквивалентна нулю, поскольку по построению силы  и
и  равны по величине, направлены в противоположные стороны и приложенные к концам диагонали параллелограмма
равны по величине, направлены в противоположные стороны и приложенные к концам диагонали параллелограмма  Итак, систему
Итак, систему  можно отбросить, не нарушая состояния тела. Таким образом, пару сил
можно отбросить, не нарушая состояния тела. Таким образом, пару сил которая осталась, эквивалентна заданной паре сил
которая осталась, эквивалентна заданной паре сил 

Покажем, что при указанном перемещении пары сил можно изменять величину
силы, входящей в нее, и длину плеча, о чем говорится в теореме. Для этого рассмотрим исходную пару сил  (рис. 2.8, б).
(рис. 2.8, б).
Приложим к точкам а и b систему сил  эквивалентную нулю. Пусть
эквивалентную нулю. Пусть  и
и 
равнодействующие сходящихся систему сил и
и  , приложенных соответственно в точках а и Ь. Тогда система сил
, приложенных соответственно в точках а и Ь. Тогда система сил эквивалентна системе сил
эквивалентна системе сил  а следовательно, паре сил
а следовательно, паре сил  Момент пары сил
Момент пары сил  , равен
, равен  а момент пары сил
а момент пары сил  равна
равна  . Легко убедиться, что алгебраические значения этих моментов одинаковы. Кроме того, из рис. 2.8, а видно, что направления вращений, создаваемых парами, совпадают. Итак, моменты пар сил
. Легко убедиться, что алгебраические значения этих моментов одинаковы. Кроме того, из рис. 2.8, а видно, что направления вращений, создаваемых парами, совпадают. Итак, моменты пар сил  и
и  равны между собой. Теорема доказана.
равны между собой. Теорема доказана.
Теорема 2. Две пары сил, которые лежат в одной или параллельных плоскостях и имеют одинаковые по величине, но противоположные по направлению моменты, составляют систему пар сил, эквивалентную нулю.
Доказательство. Пусть в плоскости заданы две пары сил  и
и  , в которых одинаковые алгебраические значения моментов, но противоположные направления вращений, создаваемых этими парами. По теореме 1, преобразуем пару сил
, в которых одинаковые алгебраические значения моментов, но противоположные направления вращений, создаваемых этими парами. По теореме 1, преобразуем пару сил так, чтобы эти пары имели общие точки приложения сил, которые составляют пары (рис. 2.9). Из рисунка и условия
так, чтобы эти пары имели общие точки приложения сил, которые составляют пары (рис. 2.9). Из рисунка и условия  видим, что мы получили систему сил
видим, что мы получили систему сил 
 эквивалентную нулю. Итак, система с двух пар
эквивалентную нулю. Итак, система с двух пар  и
и  эквивалентна нулю. Моменты этих пар соответственно равны:
эквивалентна нулю. Моменты этих пар соответственно равны:
 (2.12)
(2.12)
С другой стороны, сумма моментов всех сил, которые составляют эти пары, определяется выражением:
 (2.13)
(2.13)
которое является суммой моментов составляющих пар, равных нулю. Следовательно, эта система двух пар сил эквивалентна нулю.
Поскольку момент пары сил — вектор свободный, то доказанные теоремы справедливы также для случая пар сил, лежащих в параллельных плоскостях.
Из доказанных теорем следует вывод об эквивалентности двух пар сил, имеющих геометрически одинаковые моменты.
Кроме того, эти теоремы позволяют установить правило составления пар сил, которые лежат не только в параллельных плоскостях, но и в тех, которые пересекаются.
Так, если задан систему n пар 
 то она может быть заменена одной, эквивалентной заданной системе пар — результирующей парой. Причем момент результирующей пары
то она может быть заменена одной, эквивалентной заданной системе пар — результирующей парой. Причем момент результирующей пары  равен векторной (геометрической) сумме моментов составляющих пар:
равен векторной (геометрической) сумме моментов составляющих пар:
 (2.14)
(2.14)
Отметим, что пару сил нельзя заменить одной силой, которая была бы эквивалентна по действию на твердое тело двум равным по величиной, параллельным и противоположно направленным силам. Действительно, если предположить, что пара сил эквивалентна некоторой силе  , то через их эквивалентность момент пары сил и момент силы
, то через их эквивалентность момент пары сил и момент силы  относительно произвольной точки, должны быть одинаковыми. Выбрав эту точку на линии действия силы
относительно произвольной точки, должны быть одинаковыми. Выбрав эту точку на линии действия силы  , мы приходим к противоречию, поскольку момент пары сил остается без изменений, он не зависит от выбора центра, а момент силы
, мы приходим к противоречию, поскольку момент пары сил остается без изменений, он не зависит от выбора центра, а момент силы  равен нулю. Этим доказывается приведенное утверждение.
равен нулю. Этим доказывается приведенное утверждение.
Итак, пара сил, действующих на твердое тело, образует новый самостоятельный элемент статики, который вместе с силой составляет важное понятия механики. Основные свойства этого элемента и основные преобразования, которым он подлежит, вполне устанавливаются доказанными теоремами о парах.
Эти свойства и превращения будут выглядеть так:
1) пару сил можно переносить в плоскости ее действия, в том числе и вращать на любой угол;
2) пару сил можно переносить в любую плоскость, параллельную плоскости действия этой пары;
3) можно изменять силы, образующие пару и плечо, не меняя момента пары;
4) несколько пар сил, произвольно расположенных в пространстве, можно заменить одной парой, момент которой равен геометрической сумме моментов составляющих пар.
Из изложенного в главах 1 и 2 приходим к такому важному выводу: механическое влияние в статике характеризуется тремя типами векторов: силой — скользящим вектором, моментом силы относительно точки — приложенным вектором и парой сил — свободным вектором.

Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Центр масс
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Плоская система пар сил
Пара сил и момент пары
В предыдущей статье мы рассматривали сложение пары антипараллельных сил, не равных по модулю и пришли к выводу, что равнодействующая таких сил существует и ее величина равна алгебраической сумме сил; точка приложения равнодействующей пары антипараллельных сил находится в пропорциональной зависимости от соотношения между модулями сил пары.
Если пара антипараллельных сил состоит из одинаковых по модулю сил, то такая система сил называется парой сил или просто парой.
Понятие пары сил введено в механику в начале XIX века французским ученым Л. Пуансо (1777-1859), который разработал теорию пар.
Плоскость, в которой расположена пара, называется плоскостью действия пары. Расстояние между линиями действия сил, составляющих пару, называется плечом пары.
Эффект действия пары состоит в том, что она стремится вращать тело, к которому приложена. Ее вращающее действие определяется моментом пары.
Моментом пары называется произведение модуля одной из сил, составляющих пару, на плечо:
M(F1, F2) = F1h =F2h = m .
Момент пары и момент силы имеют одинаковую размерность — ньютон×метр (Нм).
Правило знаков для моментов пары.
Условимся считать момент пары положительным, если она стремится вращать свое плечо против часовой стрелки, и наоборот.

Если сделать геометрические построения (см. рисунок 1), то можно сделать вывод, что момент пары численно равен удвоенной площади треугольника, у которого основанием является вектор одной из сил пары, а высотой – плечо пары (как известно, площадь треугольника равна половине произведения основания на высоту).
Очевидно, что перенос любой из сил пары вдоль линии ее действия не влияет на вращающее действие всей пары, т. е. не изменяет момент пары, поскольку и основание треугольника (модуль силы) и его высота (плечо пары) в этом случае не меняются (перенос сил, составляющих пару вдоль линий их действия приводит к образованию равновеликих треугольников).
***
Основные свойства пары сил
Основные свойства пары сил характеризуются следующими тремя теоремами.
Теорема I. Пара сил не имеет равнодействующей.
Дана пара сил (F1, F2) с плечом h. (см. рисунок 2а).
Ранее мы доказали, что равнодействующая пары антипараллельных сил может быть определена, как алгебраическая сумма сил, составляющих такую пару, т. е., с учетом направленности векторов сил в разные стороны: FΣ = |F1| — |F2|.
Применим это утверждение к случаю, когда силы равны между собой по модулю, и получим, что равнодействующая будет равна нулю: F1 – F2 = 0.
Из этого следует, что пара силы не имеет равнодействующей (или равнодействующая пары равна нулю).
Теорема II. Алгебраическая сума моментов сил, составляющих пару, относительно любой точки плоскости действия пары есть величина постоянная, равная моменту пары.

Дана пара сил (F1, F2) с плечом h. (см. рисунок 2b).
Момент пары: m = F1h = F2h.
Выберем в плоскости действия пары произвольную точку А и примем ее за центр моментов:
MA(F1) = -F1a;
MA(F2) = F2(a+h).
Сложим правые и левые части этих равенств (не забываем, что |F1| = |F2|):
MA(F1) + MA(F2) = -F1а + F2(a+h) = -F1а + F2а + F2h = F2h = m .
Теорема доказана.
Из этой теоремы следует, что при любом центре моментов пара сил войдет в уравнение моментов с одним и тем же знаком и одной и той же величиной.
***
Теорема III. Алгебраическая сумма проекций сил пары на любую ось всегда равна нулю.

Дана пара сил (F1, F2) и ось z, лежащая в плоскости действия пары (см. рисунок 3). Из равенства заштрихованных треугольников видно, что F1z = F2z, при этом проекция одной из сил положительная, проекция другой силы – отрицательная, следовательно, сумма этих проекций равна нулю.
Теорема доказана.
Из теорем I и III следует, что пара сил не может входить ни в уравнение сил, ни в уравнение проекций сил, поскольку ее нельзя заменить ни равнодействующей, ни проекцией силы.
***
Эквивалентные пары
Две пары называют эквивалентными, если одну из них можно заменить другой, не нарушая механического состояния свободного твердого тела.
Теорема об эквивалентных парах формулируется так: если моменты двух пар алгебраически равны, то эти пары эквивалентны.

Пусть даны две пары (F1, F2) и (Q1, Q2), моменты которых алгебраически равны (см. рисунок 4), т. е.:
M(F1, F2) = M(Q1, Q2), или Fa = Qh.
Продолжим линии действия сил пары до их взаимного пересечения в точках А и В. На основании следствия из III и IV аксиом статики перенесем силы F и F1 вдоль линий их действия в точки А и В.
Соединим эти точки прямой линией и разложим силы F и F1 по направлению АВ и вдоль линий действия сил Q и Q1.
Из равенства треугольников Akd и Bmn вытекет, что T = T1 и S = S1.
Силы T и Т1 представляют собой уравновешенную систему, так как они равны по модулю и действуют по одной прямой в противоположные стороны. На основании аксиомы IV такую систему можно отбросить.
Силы S и S1 представляют собой пару сил с плечом b.
Таким образом, пара (F1, F2) ≡ паре (S1, S2).
Рассмотрим треугольники AmB и AnB.
Они имеют общее основание АВ, и высоты их равны, следовательно площади тоже будут равны.
Поскольку площадь треугольника AnB равна половине момента пары (F1, F2), а площадь треугольника AmB равна половине момента пары (S1, S2), то можно записать:
М(F, F1) = М(S, S1) или Fa = Sb.
По условиям теоремы Fa = Qb, следовательно Sb = Qb, отсюда S = Q, S1 = Q1.
Силы S и Q равны по модулю, действуют вдоль одной прямой в одном направлении, следовательно они эквивалентны друг другу; на этом же основании можно сделать вывод об эквивалентности сил S1 и Q1. Очевидно, что тогда пара (Q,O1) ≡ паре (S,S1).
Так как две пары порознь эквивалентны одной и той же третьей паре, то эти пары тоже будут эквивалентны между собой:
М(F, F1) = М(Q, Q1), что и требовалось доказать.
Из доказательства теоремы об эквивалентных парах вытекает четыре следствия:
- не изменяя механического состояния тела, пару можно переносить как угодно в плоскости ее действия;
- не изменяя механического состояния тела, можно менять силы и плечо пары, но так, чтобы ее момент оставался неизменным;
- чтобы задать пару, достаточно задать ее момент, поэтому иногда слово «пара» заменяют словом «момент»;
- условия равновесия плоской системы параллельных сил будут справедливы, если вместе с такой системой действуют и пары сил, так как их можно повернуть в плоскости действия и поставить силы пары параллельно другим силам системы.
***
Теорема о сложении пар
Теорема: Всякая плоская система пар эквивалентна одной результирующей паре, момент которой равен алгебраической сумме моментов данных пар.
Пусть даны три пары с моментами m1, m2 и m3, действующие в одной плоскости (рис. 1а).

На основании следствия из теоремы об эквивалентных парах преобразуем эти пары так, чтобы их плечи стали равными d, и перенесем к произвольно взятому на плоскости отрезку АВ длиной d.
Тогда вместо заданной системы пар получим новую систему, эквивалентную данной, причем моменты данных и новых пар будут равны, т. е.
m1 = -P1d ; m2 = F1d ; m3 = -Qd .
Сложив три силы в точке А, получим равнодействующую R1, модуль которой R1 = P1 + Q1 – F1.
Сложив три силы в точке В (рис. 4b) , получим равнодействующую R2, модуль которой R2 = P2 + Q2 – F2, причем очевидно, что силы R1 и R2 равны по модулю, параллельны и противоположно направлены.
Значит, система (R1, R2) представляет собой пару с плечом d, эквивалентную данной системе пар.
Момент этой результирующей пары:
m = -R1d = -( P1 + Q1 – F1)d = -P1d – Q1d + F1d, или
m = m1 +m2 + m3.
Аналогичное доказательство можно привести для любой плоской системы пар, т. е. в общем виде можно записать:
m = Σmi, что и требовалось доказать.
***
Условие равновесия плоской системы пар
Применяя доказанную ранее теорему о сложении пар к плоской системе пар, находящихся в равновесии, запишем:
m = Σmi = 0.
Следовательно, условие равновесия плоской системы пар в общем виде будет выглядеть так:
Σmi = 0,
а формулируется следующим образом: для равновесия плоской системы пар необходимо и достаточно, чтобы алгебраическая сумма моментов данных пар равнялась нулю.
***
Опоры и опорные реакции балок
Опоры балок по их устройству могут быть разделены на три основных типа (см. рисунок 6): шарнирно-подвижная (опора А), шарнирно-неподвижная (опора В) и жесткая заделка (опора С). На приведенном рисунке показаны два способа условного изображения шарнирно-неподвижной опоры (опора А).

Применим правило для определения направления реакций связей и определим, какое направление могут иметь реакции представленных опор в зависимости от ограничений, накладываемых на балку.
Шарнирно-подвижная опора допускает поворот вокруг оси шарнира и линейное перемещение параллельно опорной плоскости. Если пренебречь трением на опоре и в шарнире, то реакция такой связи будет направлена перпендикулярно опорной плоскости, и неизвестна только по модулю (одно неизвестное).
Шарнирно-неподвижная опора допускает только поворот вокруг оси шарнира, и не допускает никаких линейных перемещений. Реакция такой опоры будет направлена перпендикулярно оси шарнира; модуль и направление ее заранее не известны (два неизвестных).
Жесткая заделка (защемление) не допускает ни линейных перемещений, ни поворотов защемленного конца балки. Жесткую заделку заменяют реактивной силой, неизвестной по модулю и направлению, и реактивным моментом (три неизвестных).
Реактивную силу, неизвестную по направлению, раскладывают на две взаимно-перпендикулярные составляющие. Если при решении задачи реактивная сила или реактивный момент получаются отрицательными, то их действительное направление противоположно принятому.
Кроме перечисленных выше трех основных типов опор балок в конструкциях нередко балка свободно опирается на плоскость (поверхность) или ребро призмы (угол). В этих случаях направление реакций определяют, как для аналогичных типов связей, рассмотренных здесь.
***
Пример решения задачи по определению реакций опор балки
Пусть горизонтальная балка длиной l = 4 м закреплена на опорах, как показано на рисунке 7, и нагружена парой сил с моментом m = 420 Нм.
Не учитывая силу тяжести балки, определим реакции R опор А и В.

Решение.
Отбросим опоры, заменив их реакциями, и рассмотрим равновесие балки.
Так как пару сил можно уравновесить только парой, то реакции R опор А и В должны образовывать пару сил, причем реакция шарнирно подвижной опоры В перпендикулярна опорной плоскости.
Применим условие равновесия плоской системы пар и составим уравнение равновесия:
Σmi = 0; -m + Rh = 0, где h = lcos30˚ .
Подставив известные значения, получим: R = m/h = m/(l cos30˚) = 420/(4×0,866) ≈ 120 Н.
Задача решена.
***
Пример решения задачи по определению реакции в жесткой заделке
Пусть консольная балка длиной l = 2 м нагружена на свободном конце силой F = 3000 Н (рис.  .
.

Не учитывая силу тяжести балки, определим реакцию заделки.
Решение.
Отбросим заделку, заменив ее реакциями, и рассмотрим равновесие балки.
Реакция заделки представляет собой реактивную силу R и реактивный момент m.
Так как реактивный момент m может быть уравновешен только парой сил, то нагрузка F и реакция R должны образовывать пару, следовательно:
R = F = 3000 Н .
Далее применим условие равновесия плоской системы пар и составим уравнение равновесия:
Σmi = 0; m – F1 – 0, откуда получим:
m = Fl = 3000×2 = 6000 Нм.
Задача решена.
***
Плоская система произвольно расположенных сил
Содержание:
Теория пар:
Пару сил в механике рассматривают как одно из основных понятий наряду, с понятием силы.
Что такое пара сил
Парой сил называют систему двух равных по модулю параллельных сил, направленных в противоположные стороны (рис. 24).
Пара сил не составляет системы сил, эквивалентной нулю.
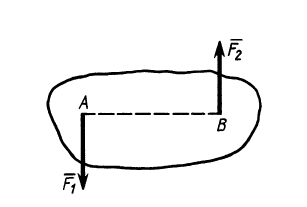
Рис. 24
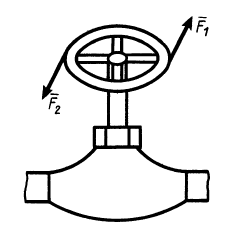
Рис. 25
Известно, что под действием пары сил свободное твердое тело выходит из равновесия. Обычно пару сил  прилагают к телу, которое должно вращаться, например к маховику вентиля при его закрывании и открывании (рис. 25). Поэтому пару сил нельзя заменить одной силой и, следовательно, она не имеет равнодействующей, а является такой системой сил, упростить которую нельзя. Каждая из сил, входящих в состав пары сил, имеет свойства обычных сил.
прилагают к телу, которое должно вращаться, например к маховику вентиля при его закрывании и открывании (рис. 25). Поэтому пару сил нельзя заменить одной силой и, следовательно, она не имеет равнодействующей, а является такой системой сил, упростить которую нельзя. Каждая из сил, входящих в состав пары сил, имеет свойства обычных сил.
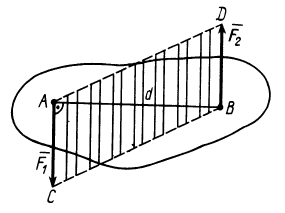
Рис. 26
Пара сил, действующая на твердое тело, характеризуется прежде всего плоскостью действия, аналогично тому, как сила характеризуется линией действия. Плоскостью действия пары сил называют плоскость, в которой расположены силы пары.
Для количественной характеристики действия пары сил на твердое тело и указания направления, в котором пара сил стремится вращать тело в плоскости действия, введем понятие алгебраического момента пары сил.
Алгебраическим моментом пары сил называют взятое со знаком плюс или минус произведение одной из сил пары на плечо пары сил.
Плечом пары сил  называют кратчайшее расстояние между линиями действия сил пары (рис. 26).
называют кратчайшее расстояние между линиями действия сил пары (рис. 26).
Алгебраический момент пары обозначим  или
или  . Согласно определению,
. Согласно определению,

Алгебраический момент пары сил выражается в тех же единицах, что и алгебраический момент силы относительно точки.
Алгебраический момент пары сил имеет знак плюс, если пара сил стремится вращать тело против часовой стрелки, и знак минус, если пара сил стремится вращать тело по часовой стрелке.
Алгебраический момент пары сил не зависит от переноса сил пары вдоль своих линий действия и может быть равен нулю, если линии действия сил пары совпадают, т. е. в случае двух равных по модулю, но противоположных по направлению сил, действующих вдоль одной прямой. Такая система двух сил, как известно, эквивалентна нулю. Алгебраический момент пары сил численно равен площади параллелограмма, построенной на силах пары:

Теорема об эквивалентности двух пар сил, расположенных в одной плоскости
Докажем, что пары сил, расположенные в одной плоскости, по своему действию на тело отличаются одна от другой только алгебраическими моментами.
Две пары сил называют эквивалентными, если их действие на твердое тело одинаково при прочих равных условиях.
Докажем теперь следующую теорему об эквивалентности двух пар сил: пару сил, действующую на твердое тело, можно заменить другой парой сил, расположенной в той же плоскости действия и имеющей одинаковый с первой парой алгебраический момент. Иначе: две пары сил, расположенные в одной плоскости, эквивалентны, если они имеют одинаковые алгебраические моменты.
Пусть на твердое тело действует пара сил  с алгебраическим моментом
с алгебраическим моментом  (рис. 27). Перенесем силу
(рис. 27). Перенесем силу  в точку
в точку  , а силу
, а силу  — в точку
— в точку  , проведем через точки
, проведем через точки  и
и  две любые параллельные прямые, пересекающие линии действия сил пары и лежащие, следовательно, в плоскости действия заданной пары сил. Соединив прямой точки
две любые параллельные прямые, пересекающие линии действия сил пары и лежащие, следовательно, в плоскости действия заданной пары сил. Соединив прямой точки  и
и  , разложим силы в точке
, разложим силы в точке  и в точке
и в точке  по правилу параллелограмма, как указано на рис. 27. Тогда
по правилу параллелограмма, как указано на рис. 27. Тогда

Так как силы и образуют пару сил, то
и, следовательно,

Итак,

так как
следовательно, эту систему двух сил можно отбросить.
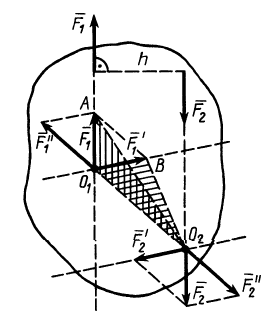
Рис. 27
Таким образом, заданную пару сил заменим другой парой сил  . Докажем, что алгебраические моменты у этих пар сил одинаковы. Направление вращения у них одно и то же. Имеем
. Докажем, что алгебраические моменты у этих пар сил одинаковы. Направление вращения у них одно и то же. Имеем

Но  так как эти треугольники имеют общее основание
так как эти треугольники имеют общее основание  и равные высоты (их вершины расположены на общей прямой, параллельной основанию).
и равные высоты (их вершины расположены на общей прямой, параллельной основанию).
Таким образом, теорема доказана и можно сделать следующие выводы:
- а) пару сил как жесткую фигуру можно как угодно поворачивать и переносить в ее плоскости действия;
- б) у пары сил можно изменять плечо и силы, сохраняя при этом алгебраический момент пары и плоскость действия.
Эти операции над парами сил не изменяют их действия на твердое тело.
Теорема о переносе пары сил в параллельную плоскость
Действие пары сил на твердое тело не изменяется от переноса этой пары сил в параллельную плоскость (рис. 28).
Для доказательства этой теоремы к паре сил в точках  и
и  , где перпендикуляры, опущенные из точек
, где перпендикуляры, опущенные из точек  и
и  плоскости
плоскости  , пересекаются параллельной ей плоскостью
, пересекаются параллельной ей плоскостью  , приложим две системы сил
, приложим две системы сил  и
и  , каждая из которых эквивалентна нулю, т. е.
, каждая из которых эквивалентна нулю, т. е.

Выберем силы  и
и  так, чтобы они удовлетворяли условиям
так, чтобы они удовлетворяли условиям

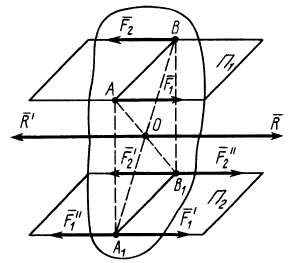
Рис. 28
Сложим две равные и параллельные силы  и
и  . Их равнодействующая
. Их равнодействующая  параллельна этим силам, равна их сумме и приложена посередине отрезка
параллельна этим силам, равна их сумме и приложена посередине отрезка  в точке
в точке  , так как складываются равные параллельные силы. Равнодействующая
, так как складываются равные параллельные силы. Равнодействующая  двух равных параллельных сил
двух равных параллельных сил  и
и  тоже равна их сумме, параллельна им и приложена на середине отрезка
тоже равна их сумме, параллельна им и приложена на середине отрезка  , т. е. в точке , где пересекаются диагонали прямоугольника
, т. е. в точке , где пересекаются диагонали прямоугольника  . Так как
. Так как  , то система сил
, то система сил  эквивалентна нулю и ее можно отбросить.
эквивалентна нулю и ее можно отбросить.
Таким образом, пара сил  эквивалентна такой же паре сил
эквивалентна такой же паре сил  , но лежащей в другой, параллельной плоскости. Пару сил, не изменяя ее действия на твердое тело, можно перенести из одной плоскости в другую, параллельную ей.
, но лежащей в другой, параллельной плоскости. Пару сил, не изменяя ее действия на твердое тело, можно перенести из одной плоскости в другую, параллельную ей.
Векторный момент пары сил
Пару сил, приложенную к твердому телу, можно охарактеризовать плоскостью действия, моментом пары сил и направлением вращения пары. Все эти элементы пары сил в пространстве можно выразить одной величиной — векторным моментом пары сил.
Векторным моментом пары сил назовем вектор, числовое значение которого равно произведению силы пары на ее плечо. Векторный момент пары сил направлен перпендикулярно плоскости действия пары сил так, чтобы с его направления можно было видеть стремление пары сил вращать тело против часовой стрелки. Векторный момент пары сил условимся временно прикладывать посередине отрезка, соединяющего точки приложения сил пары (рис. 29). Его можно прикладывать также, как будет доказано ниже, в любой точке тела, _на которое действует пара сил. Векторный момент пары сил обозначим  или
или  .
.
Согласно определению, числовое значение векторного момента пары сил  совпадает с модулем алгебраического момента пары сил и, следовательно,
совпадает с модулем алгебраического момента пары сил и, следовательно,
где  — плечо пары сил.
— плечо пары сил.
Векторный момент пары сил численно выражается площадью параллелограмма, построенного на силах пары:

Отметим простейшие свойства векторного момента пары сил: его числовое значение не зависит от переноса сил пары вдоль своих линий действия, и он может быть равен нулю, если одна из сторон параллелограмма  превратится в точку, т. е. плечо пары или сила пары становится равной нулю.
превратится в точку, т. е. плечо пары или сила пары становится равной нулю.
Векторный момент пары сил можно выразить в виде векторного произведения двух векторов:

Действительно,

но

и, следовательно,

что совпадает с модулем векторного момента пары сил.
Направления векторных произведений  и
и  перпендикулярны плоскости, где лежат сомножители векторных произведений, а следовательно, и плоскости действия пары сил. Они совпадают с направлением векторного момента пары сил
перпендикулярны плоскости, где лежат сомножители векторных произведений, а следовательно, и плоскости действия пары сил. Они совпадают с направлением векторного момента пары сил  .
.
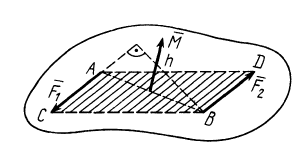
Рис. 29
Эквивалентность пар сил
Сформулируем условия эквивалентности двух пар сил, используя наиболее общую характеристику пары сил — ее векторный момент.
Известно, что пару сил можно как угодно поворачивать и переносить в плоскости ее действия; действие пары сил на твердое тело не изменяется, если алгебраический момент пары сил остается таким же. Следовательно, векторный момент пары сил можно переносить параллельно самому себе в любую точку твердого тела, лежащую в плоскости действия пары сил. Так как к тому же пару сил можно переносить в параллельную плоскость, то векторный момент пары сил можно переносить параллельно самому себе в любую точку тела, не изменяя действия пары сил на твердое тело. Поэтому векторный момент пары сил, действующей на твердое тело, есть свободный вектор, т. е. он характеризуется только модулем и направлением, а точкой приложения у него может быть любая точка тела; следовательно, векторный момент пары сил не обязательно прикладывать посередине отрезка, соединяющего точки приложения сил пары.
Итак, две пары сил, действующие на одно и то же твердое тело, эквивалентны, если они имеют одинаковые по модулю и направлению векторные моменты.
Теорема о сумме моментов сил пары
Сумма векторных моментов сил, входящих в состав пары, относительно любой точки не зависит от выбора точки и равна векторному моменту этой пары сил, т. е. для пары сил 

где  — любая точка (рис. 30).
— любая точка (рис. 30).
Эту теорему докажем, вычисляя левую часть равенства (3):

так как для пары сил
Но
и не зависит от выбора точки  ; следовательно,
; следовательно,

что на основании формулы (2) совпадает с векторным моментом пары сил . Таким образом,

Взяв за точку последовательно точки  и
и  , по формуле (3) имеем
, по формуле (3) имеем

т. е. векторный момент пары сил равен векторному моменту одной из сил пары относительно точки приложения другой силы пары.
Эта теорема имеет важное значение при решении задач, когда надо вычислять сумму моментов сил пары относительно какой-либо точки. Для этого достаточно взять момент пары сил, что справедливо для любой точки.
Если моментная точка  выбирается в плоскости действия сил пары как частный случай, справедлива теорема о сумме алгебраических моментов сил пары: сумма алгебраических моментов сил, входящих в состав пары сил, относительно точки, лежащей в плоскости действия пары сил, равна алгебраическому моменту пары сил и, следовательно, не зависит от выбора моментной точки, т. е.
выбирается в плоскости действия сил пары как частный случай, справедлива теорема о сумме алгебраических моментов сил пары: сумма алгебраических моментов сил, входящих в состав пары сил, относительно точки, лежащей в плоскости действия пары сил, равна алгебраическому моменту пары сил и, следовательно, не зависит от выбора моментной точки, т. е.

Выбирая и за моментные точки, лежащие на линиях действия сил пары, получаем

т. е. алгебраический момент пары сил равен алгебраическому моменту одной из сил пары относительно точки, лежащей на линии действия другой силы этой пары.
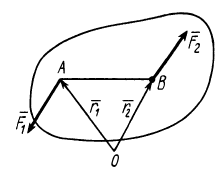
Рис. 30
Сложение пар сил
Рассмотрим случай, когда пары сил не лежат в одной или параллельных плоскостях, а расположены в пересекающихся плоскостях. Докажем, что две пары сил, действующие на одно и то же тело и лежащие в пересекающихся плоскостях, можно заменить одной эквивалентной парой сил, векторный Момент которой равен сумме векторных моментов заданных пар сил.
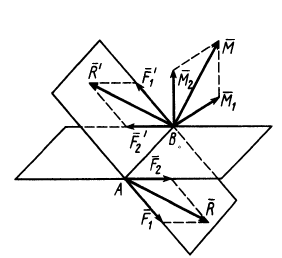
Рис. 31
Пусть имеются две пары сил  и
и  (рис.31), лежащие в пересекающихся плоскостях. Эти пары сил можно получить из пар сил, как угодно расположенных в пересекающихся плоскостях, путем параллельного переноса, поворота в плоскости действия и одновременного изменения плеч и сил пар. Сложим силы в точках
(рис.31), лежащие в пересекающихся плоскостях. Эти пары сил можно получить из пар сил, как угодно расположенных в пересекающихся плоскостях, путем параллельного переноса, поворота в плоскости действия и одновременного изменения плеч и сил пар. Сложим силы в точках  и
и  по правилу параллелограмма. После сложения получим две силы
по правилу параллелограмма. После сложения получим две силы  и
и  :
:
R = Fi  F2′> R’ = F+F’2.
F2′> R’ = F+F’2.
Силы и составляют пару сил, так как они приложены в разных точках и  как равнодействующие равных, но противоположных сил, образующих пары сил.
как равнодействующие равных, но противоположных сил, образующих пары сил.
Итак, при сложении двух пар сил, лежащих в пересекающихся плоскостях, получается эквивалентная пара сил. Обозначим  векторный момент пары сил
векторный момент пары сил  . Тогда на основании формул (4) и (7)
. Тогда на основании формул (4) и (7)

Учитывая, что

где  и
и  — векторные моменты заданных пар сил и , имеем
— векторные моменты заданных пар сил и , имеем
т. е. векторный момент эквивалентной пары сил равен сумме векторных моментов заданных пар.
- Заказать решение задач по теоретической механике
Таким образом, чтобы сложить две пары сил, лежащие в пересекающихся плоскостях, надо сложить их векторные моменты по правилу параллелограмма в какой-либо точке тела, например в точке  (рис. 31). Сложение пар сил, лежащих в одной плоскости или параллельных плоскостях, есть частный случай сложения пар сил в пересекающихся плоскостях, так как в этом случае их векторные моменты параллельны и, следовательно, векторное сложение перейдет в алгебраическое.
(рис. 31). Сложение пар сил, лежащих в одной плоскости или параллельных плоскостях, есть частный случай сложения пар сил в пересекающихся плоскостях, так как в этом случае их векторные моменты параллельны и, следовательно, векторное сложение перейдет в алгебраическое.
Последовательно применяя правило параллелограмма ко всем векторным моментам пар сил, можно любое количество пар сил в общем случае заменить одной парой сил, векторный момент которой равен сумме векторных моментов заданных пар сил:
Если это сложение выполнять графически, особенно когда векторные моменты пар сил находятся в одной плоскости, то векторный момент эквивалентной пары сил изобразится замыкающей векторного многоугольника, построенного из векторных моментов заданных пар сил.
Для пар сил, расположенных в одной плоскости, теорема об их сложении формулируется так: пары сил, действующие на твердое тело и расположенные в одной плоскости, можно привести к одной паре сил, алгебраический момент которой равен сумме алгебраических моментов составляющих пар сил, т. е.

Так же складываются пары сил, расположенные в параллельных плоскостях, так как их предварительно можно перенести в одну плоскость.
Рис. 32
Пример 1.
Определить векторный момент пары сил, которая получается при сложении двух пар сил с моментами  и
и  , действующих на одно и то же твердое тело. Пары сил расположены в пересекающихся плоскостях, двугранный угол между которыми равен
, действующих на одно и то же твердое тело. Пары сил расположены в пересекающихся плоскостях, двугранный угол между которыми равен  .
.
Решение. Складываем по правилу параллелограмма векторные моменты заданных пар сил. Для модуля векторного момента эквивалентной пары сил  имеем
имеем

так как угол между  и
и  равен двугранному углу между плоскостями действия пар сил.
равен двугранному углу между плоскостями действия пар сил.
Пример 2.
Пары сил с моментами  и
и  противоположного направления вращения находятся в параллельных плоскостях. Пара, имеющая момент
противоположного направления вращения находятся в параллельных плоскостях. Пара, имеющая момент  , расположена в перпендикулярной плоскости (рис. 32). Определить момент эквивалентной пары сил.
, расположена в перпендикулярной плоскости (рис. 32). Определить момент эквивалентной пары сил.
Решение. Сложим сначала алгебраически моменты пар сил, расположенных в параллельных плоскостях. Получим пару сил с моментом  , так как моменты пар сил имеют противоположные знаки. Пару сил с моментом
, так как моменты пар сил имеют противоположные знаки. Пару сил с моментом  сложим с парой сил, имеющей момент
сложим с парой сил, имеющей момент  . Так как угол между и
. Так как угол между и  прямой, то момент эквивалентной пары
прямой, то момент эквивалентной пары

Условия равновесия пар сил
Если на твердое тело действуют пары сил, как угодно расположенные в пространстве, то эти пары сил можно заменить одной эквивалентной парой сил, векторный момент которой равен сумме векторных моментов заданных пар сил, т. е.
Векторный момент  геометрически изображается замыкающей векторного многоугольника, построенного на векторных моментах заданных пар сил.
геометрически изображается замыкающей векторного многоугольника, построенного на векторных моментах заданных пар сил.
Для равновесия пар сил, действующих на твердое тело, необходимо и достаточно, чтобы модуль векторного момента эквивалентной пары сил был равен нулю или чтобы векторный многоугольник, построенный на векторных моментах заданных пар сил, был замкнут.
Итак,  . Отсюда
. Отсюда
Таким образом, для равновесия пар сил, приложенных к твердому телу, необходимо и достаточно, чтобы алгебраическая сумма проекций векторных моментов пар сил на каждую из трех координатных осей была равна нулю.
В общем случае пары сил можно уравновесить только парой сил и нельзя уравновесить одной силой или какой-либо другой системой сил, отличной от пары сил.
В том случае, когда пары сил действуют на твердое тело, находясь в одной плоскости, их можно заменить одной эквивалентной парой сил, алгебраический момент которой равен сумме алгебраических моментов составляющих пар сил:
Для равновесия таких пар сил необходимо и достаточно, чтобы алгебраический момент эквивалентной им пары сил был равен нулю, т. е. для равновесия пар сил, действующих на твердое тело в одной плоскости, необходимо и достаточно, чтобы сумма алгебраических моментов этих пар сил была равна нулю.
Если на твердое тело действуют только пары сил, лежащие в одной плоскости, то реакции опор, уравновешивающие заданные пары сил, составляют пару сил. Например, если одной из двух опор тела в его точке является катковая опора (рис. 33), а другой — неподвижный шарнир в точке  , то направление реакции в шарнире
, то направление реакции в шарнире  противоположно направлению реакции в точке , так как эти реакции составляют пару сил. Реакция катковой опоры
противоположно направлению реакции в точке , так как эти реакции составляют пару сил. Реакция катковой опоры  перпендикулярна плоскости опоры катков и направлена вверх; следовательно,
перпендикулярна плоскости опоры катков и направлена вверх; следовательно,  направлена параллельно
направлена параллельно  вниз.
вниз.
Величины этих реакций равны. Их можно найти приравняв момент пары сил опорных реакций сумме алгебраических моментов пар сил, действующих на тело. Таким образом,
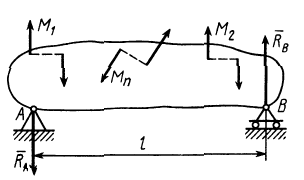
Рис. 33
Теория пар, расположенных в одной плоскости
При сложении двух параллельных сил  и
и  , направленных в разные стороны (рис. 35), может оказаться, что
, направленных в разные стороны (рис. 35), может оказаться, что  ; в этом случае равнодействующая таких сил
; в этом случае равнодействующая таких сил  а ее точка приложения С, определяемая одним из равенств:
а ее точка приложения С, определяемая одним из равенств:

находится в бесконечности.
Поэтому силы  и
и  не могут быть заменены одной равнодействующей силой. Такая система двух равных параллельных сил Р и —Р, направленных в противоположные стороны, называется парой сил (рис. 37). Расстояние р между линиями действия сил Р и —Р называется плечом пары, а произведение одной из сил пары на плечо — моментом пары, который равен:
не могут быть заменены одной равнодействующей силой. Такая система двух равных параллельных сил Р и —Р, направленных в противоположные стороны, называется парой сил (рис. 37). Расстояние р между линиями действия сил Р и —Р называется плечом пары, а произведение одной из сил пары на плечо — моментом пары, который равен:

где знак плюс берется, если пара поворачивает плоскость чертежа по направлению против часовой стрелки, а знак минус — по часовой стрелке. Будем изображать пару так, чтобы начало каждой из сил совпадало с концами плеча пары (рис. 38).

Рис. 37. Рис. 38.
Пары сил имеют следующие свойства:
- Пару сил нельзя заменить равнодействующей силой, а следовательно, и уравновесить силой; действие пары определяется ее моментом.
- Равновесие тела не нарушается при переносе пары в любое положение в ее плоскости.
Дана пара  с плечом АВ (рис. 39). Пусть повернуто плечо пары АС. Прикладывая к точкам А и С четыре равные и взаимно уравновешивающиеся силы
с плечом АВ (рис. 39). Пусть повернуто плечо пары АС. Прикладывая к точкам А и С четыре равные и взаимно уравновешивающиеся силы  , перпендикулярные к АС, находим равнодействующие
, перпендикулярные к АС, находим равнодействующие  и
и  сил
сил  и
и  , а также
, а также  и
и  .
.
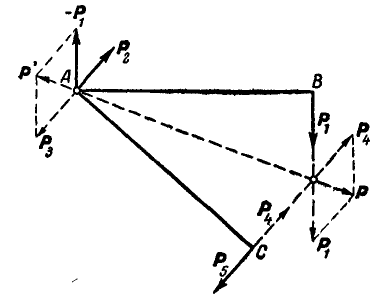
Рис. 39.
Равнодействующие Р и Р’ равны между собой и направлены по одной прямой, так как делят пополам углы соответствующих ромбов. На основании изложенного заключаем, что силы  и
и  , а также
, а также  и
и  попарно уравновешиваются. Удаляя их, поручаем пару
попарно уравновешиваются. Удаляя их, поручаем пару  с плечом АС, эквивалентную заданной паре. Этим мы доказали, что пару можно повернуть на любой угол. Отсюда делаем вывод, что пару можно также перенести в ее плоскости в любое положение, так как перенос пары можно осуществить рядом ее поворотов.
с плечом АС, эквивалентную заданной паре. Этим мы доказали, что пару можно повернуть на любой угол. Отсюда делаем вывод, что пару можно также перенести в ее плоскости в любое положение, так как перенос пары можно осуществить рядом ее поворотов.
3. При изменении величин сил и длин плеч двух пар эти пары остаются статически эквивалентными, если их момент при этом сохраняет свою величину и знак.
Пусть дана пара  с плечом АВ (рис. 40). Разлагаем силу
с плечом АВ (рис. 40). Разлагаем силу  на две силы
на две силы  и
и  из которых
из которых  приложена к точке А, a — к неизвестной пока точке С на прямой АВ. Так как
приложена к точке А, a — к неизвестной пока точке С на прямой АВ. Так как  и
и  , то силы
, то силы и , приложенные в точке A, заменяем силой . Отсюда следует, что пару
и , приложенные в точке A, заменяем силой . Отсюда следует, что пару  мы заменили парой
мы заменили парой  , эквивалентной данной, так как из равенств
, эквивалентной данной, так как из равенств  и
и  заключаем, что моменты указанных пар равны между собой. Следовательно, две пары, лежащие в одной плоскости, эквивалентны, если они имеют равные моменты и одинаковое направление вращения.
заключаем, что моменты указанных пар равны между собой. Следовательно, две пары, лежащие в одной плоскости, эквивалентны, если они имеют равные моменты и одинаковое направление вращения.
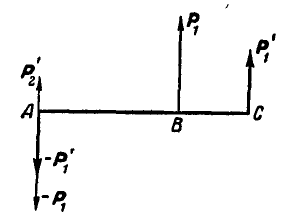
Рис. 40.
4. Для пар, расположенных в равнодействующей пары равен алгебраической сумме моментов пар составляющих.
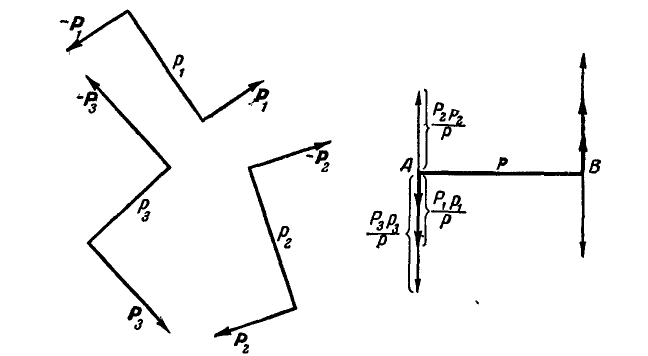
Рис. 41.
Если имеются, например, три пары (рис. 41) с неодинаковыми плечами, то, задавшись плечом р, одинаковым для всех пар, получаем силы пар, получаем силы пар равными  .
.
Совместив затем плечи всех пар, получаем одну пару с силами  . Момент
. Момент  этой пары равен:
этой пары равен:
 .
.
Вообще, если имеется  пар, то можем написать:
пар, то можем написать:

где  —момент равнодействующей пары;
—момент равнодействующей пары;
 — моменты составляющих пар.
— моменты составляющих пар.
5. Пары, взаимно уравновешиваются, если алгебраическая сумма моментов их равна нулю.
Это следует из того, что при сложении сил в точках А и В (рис. 41) сумма их может оказаться равной нулю, а потому и момент равнодействующей пары также будет равен нулю.
Полагая в уравнении (32)  , получим условие равновесия пар на плоскости:
, получим условие равновесия пар на плоскости:

Задача с решением
На свободную жесткую систему ABCD (рис. 42) действуют четыре
силы и плечи которых соответственна равны:

Определить величину и направление сил  и
и  четвертой пары так, чтобы система находилась в равновесии.
четвертой пары так, чтобы система находилась в равновесии.
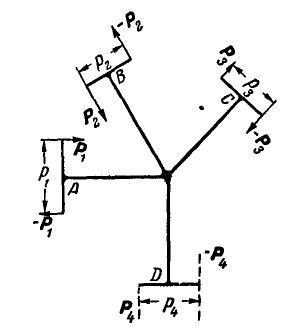
Рис. 42.
Решение. Применим уравнение (33) равновесия пар:

Выражая моменты пар через произведения сил и плеч, имеем:
 или
или 
откуда  т. е. искомая пара будет стремиться повернуть систему по направлению часовой стрелки, а каждая из неизвестных сил пары
т. е. искомая пара будет стремиться повернуть систему по направлению часовой стрелки, а каждая из неизвестных сил пары 
- Приведение системы сил к простейшей системе
- Условия равновесия системы сил
- Плоская система сил
- Трение
- Аксиомы и теоремы статики
- Система сходящихся сил
- Моменты силы относительно точки и оси
- Принцип виртуальных перемещений
Основные понятия и определения статики.
Момент силы. Пара сил.
- Основные понятия и определения статики. Аксиомы статики.
- Связи и их реакции.
- Момент силы относительно центра и оси.
- Пара сил. Векторный и алгебраический момент пары сил (Свойства пар сил на плоскости).
- Условия эквивалентности пар сил.
- Сложение пар сил, лежащих в пересекающихся плоскостях.
- Условия равновесия системы пар сил.
1. Основные понятия и определения статики.
Материальные объекты в статике:
материальная точка,
система материальных точек,
абсолютно твердое тело.
Системой материальных точек, или механической системой, называется такая совокупность материальных точек, в которой положение и движение каждой точки зависит от положения и движения других точек этой системы.
Абсолютно твердое тело – это тело, расстояние между двумя точками которого не изменяется.
Твердое тело может находиться в состоянии покоя или движения определенного характера. Каждое их этих состояний будем называть кинематическим состоянием тела.
|
|
Сила — мера механического взаимодействия тел, определяющая интенсивность и направление этого взаимодействия. Сила может быть приложена в точке, тогда эта сила – сосредоточенная. Сила может действовать на все точки данного объема или поверхности тела, тогда эта сила – распределенная. |
|
Система сил — совокупность сил, действующих на данное тело. |
|
|
Равнодействующей называется сила, эквивалентная некоторой системе сил. |
|
|
Уравновешивающей силой называется сила, равная по модулю равнодействующей и направленная по линии ее действия в противоположную сторону. |
|
|
Системой взаимно уравновешивающихся сил называется система сил, которая будучи приложенной к твердому телу, находящемуся в покое, не выводит его из этого состояния. |

Внутренние силы – это силы, которые действуют между точками или телами данной системы.
Внешние силы – это силы, которые действуют со стороны точек или тел, не входящих в данную систему.
Задачи статики:
— преобразование систем сил, действующих на твердое тело в эквивалентные им системы;
— исследование условий равновесия тел под действием приложенных к ним сил.
1. Аксиомы статики.
|
|
1. Аксиома инерции. Под действием взамно-уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно. 2. Аксиома равновесия двух сил. Две силы, приложенные к твердому телу взаимно уравновешиваются только в том случае, если их модули равны и они направлены по одной прямой в противоположные стороны. |

|
|
3. Аксиома присоединения и исключения уравновешивающихся сил. Действие системы сил на твердое тело не изменится, если к ней присоединить или из нее исключить систему взаимно-уравновешивающихся сил. Следствие. Не изменяя кинематического состояния абсолютно твердого тела, силу можно переносить вдоль линии ее действия, сохраняя неизменным ее модуль и направление. Сила — скользящий вектор. |
|
|
4. Аксиома параллелограмма сил. Равнодействующая двух пересекающихся сил приложена в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах.
|


5. Аксиома равенства действия и противодействия. Всякому действию соответствует равное и противоположно направленное противодействие.
2. Связи и их реакции
Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении.
Тело, ограничивающее свободу движения данного твердого тела, является по отношению к нему связью.
Твердое тело, свобода движения которого ограничено связями, называется несвободным.
Все силы, действующие на несвободное твердое тело, можно разделить на:
- задаваемые (активные)
- реакции связей
Задаваемая сила выражает действие на данное тело других тел, способных вызвать изменение его кинематического состояния.
Реакция связи – это сила, с которой данная связь действует на тело, препятствуя тем или иным его перемещениям.
Принцип освобождаемости твердых тел от связей — несвободное твердое тело можно рассматривать как свободное, на которое кроме задаваемых сил, действуют реакции связей.
Как определить направление реакции?
Если существует два взаимно перпендикулярных направления на плоскости, в одном из которых связь препятствует перемещению тела, а в другом нет, то направление ее реакции противоположно первому направлению.
В общем случае направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу.

 |
|
|
|
Неподвижный шарнир Подвижный шарнир |


3. Момент силы относительно центра
Моментом силы F относительно некоторого неподвижного центра О называется вектор, расположенный перпендикулярно к плоскости, проходящей через вектор силы и центр О, направленный в ту сторону, чтобы смотря с его конца можно было видеть поворот силы F относительно центра О против часовой стрелки.
Свойства момента силы относительно центра:
|
|
1) Модуль момента силы относительно центра может быть выражен удвоенной площадью треугольника ОАВ
2) Момент силы относительно центра равен нулю в том случае, если линия действия силы проходит через эту точку, то есть h = 0. |
|
|
3) Если из точки О в точку приложения силы А провести радиус вектор , то вектор момента силы можно выразить векторным произведением
|
|
|
4) При переносе силы по линии ее действия вектор ее момента относительно данной точки не изменяется. |

 (1.1)
(1.1)
 (1.2)
(1.2)
|
|
5) Если через центр О провести оси координат Охуz то выражение (4.2) позволяет вычислить момент МО аналитически относительно координатных осей.
|


 (1.3)
(1.3)Если к твердому телу приложено несколько сил, лежащих в одной плоскости, можно вычислить алгебраическую сумму моментов этих сил относительно любой точки этой плоскости

Момент МО, равный алгебраической сумме моментов данной системы относительно какой-либо точки в той же плоскости, называют главным моментом системы сил относительно этой точки.
3. Момент силы относительно оси
Чтобы определить момент силы относительно оси необходимо:
1) провести плоскость, перпендикулярную к оси Z;
2) определить точку О пересечения оси с плоскостью;
3) спроецировать ортогонально силу F на эту плоскость;
4) найти момент проекции силы F относительно точки О пересечения оси с плоскостью.
(1.4)
Правило знаков:

Момент силы относительно оси считается положительным, если, смотря навстречу оси Z, можно видеть проекцию  , стремящейся вращать плоскость I вокруг оси Z в сторону, противоположную вращению часовой стрелки.
, стремящейся вращать плоскость I вокруг оси Z в сторону, противоположную вращению часовой стрелки.
|
|
Свойства момента силы относительно оси 1) Момент силы относительно оси изображается отрезком, отложенным по оси Z от точки О в положительном направлении, если 2) Значение момента силы относительно оси может быть выражено удвоенной площадью Δ
3) Момент силы относительно оси равен нулю в двух случаях:
|

 > 0 и в отрицательном направлении, если
> 0 и в отрицательном направлении, если 
4. Пара сил. Векторный и алгебраический момент пары сил
Система двух равных по модулю, параллельных и противоположно направленных сил  и
и  , называется парой сил.
, называется парой сил.
Плоскость, в которой находятся линии действия сил и , называется плоскостью действия пары сил.
Кратчайшее расстояние hмежду линиями действия сил, составляющих пару, называется плечом пары сил.
Момент пары сил определяется произведением модуля одной из сил пары на плечо.
 (1.6)
(1.6)

Правило знаков
Вектор момента М пары и направляют перпендикулярно к плоскости действия пары сил в такую сторону, что бы смотря навстречу этому вектору, видеть пару сил стремящейся вращать плоскость ее действия в сторону, обратную вращению часовой стрелки.
- 4. Свойства пар сил на плоскости
Свойство 1. Вектор-момент M пары  по модулю и направлению равен векторному произведению радиуса вектора АВ на ту из сил этой пары, к началу которой направлен радиус-вектор АВ, то есть
по модулю и направлению равен векторному произведению радиуса вектора АВ на ту из сил этой пары, к началу которой направлен радиус-вектор АВ, то есть
 (1.7)
(1.7)


Если пары сил лежат в одной плоскости


Свойство 2. Главный момент сил, составляющих пару относительно произвольной точки на плоскости действия пары, не зависит от положения этой точки и равняется моменту этой пары сил.


5. Условия эквивалентности пар сил
Теорема об условии эквивалентности пар сил,
лежащих в одной плоскости.
Пары сил, лежащие в одной плоскости, эквивалентны, если их моменты равны численно и одинаковы по знаку.

|
|
следовательно, их можно исключить из этой системы сил. Тогда получим пару NK=CD=h2, эквивалентную паре KZ = h1 = AB. Из подобия треугольников |


 с плечом
с плечом с плечом
с плечом
Сравнивая (*) и (**) получим, что пару сил, не изменяя ее действия на твердое тело можно переносить в любое место плоскости ее действия, поворачивать ее плечо на любой угол, а также изменять это плечо и модули сил, не изменяя величины ее момента и направления вращения.
Следовательно, основной характеристикой пары является ее момент.
Теорема об условии эквивалентности пар сил в пространстве
Пары сил в пространстве эквивалентны, если их моменты геометрически равны.
Из рассмотренных теорем следует:
- не изменяя действия пары сил на твердое тело, пару сил можно переносить в любую плоскость, параллельную плоскости ее действия, а так же изменять ее силы и плечо, сохраняя неизменным модуль и направление ее момента.
- вектор момента пары сил определяет все три ее элемента: положение плоскости действия пары, направление вращения и численное значение момента.
Таким образом, вектор момента пары сил можно переносить в любую точку пространства, то есть
момент пары сил является свободным вектором
6. Сложение пар сил, лежащих в пересекающихся плоскостях
Теорема о сложении пар сил, лежащих в пересекающихся плоскостях
Система пар сил, лежащих в пересекающихся плоскостях эквивалентна одной паре с вектором-моментом, равным геометрической сумме векторов –моментов слагаемых пар.



то есть вектор-момент  равнодействующей пары по модулю и направлению изображается диагональю параллелограмма, построенного из векторов-моментов слагаемых пар.
равнодействующей пары по модулю и направлению изображается диагональю параллелограмма, построенного из векторов-моментов слагаемых пар.
Если на тело действует nпар, лежащих в разных плоскостях, то складывая эти пары в последовательном порядке и применяя каждый раз теорему о сложении двух пар сил, установим, что эта система пар заменится одной равнодействующей парой с вектором-моментом
 (1.8)
(1.8)


7. Условия равновесия системы пар сил
 — векторная форма (1.9)
— векторная форма (1.9)
 — в проекциях на оси координат (1.10)
— в проекциях на оси координат (1.10)