Вывод формулы угловой характеристики активной мощности.
Как было установлено
выше, мощность синхронной машины Р
зависит от
угла нагрузки 6 между векторами э. д. с.
£ и напряжения (]
машины.
Зависимость Р
= f (б) при Е
= const и U
= const называется
угловой характеристикой активней
мощности синхронной машины. Изучение
этой зависимости позволяет выяснить
ряд важных свойств синхронной машины.
Выведем математическое выражение для
угловой характеристики мощности, приняв
га
= О, так как
это сопротивление весьма мало влияет
на вид угловой характеристики.
Спроектируем на
рис. 33-3 векторы э. д. с, напряжений и
падений напряжения на направление
вектора £ и на направление, перпендикулярное
ему. Тогда получим
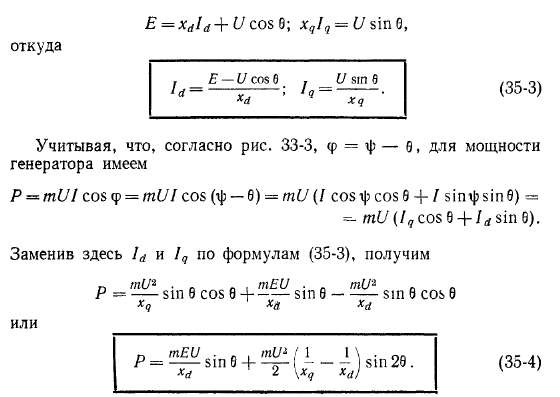
Равенство (35-4) и является искомым
математическим выражением угловой
характеристики мощности, согласно
которому Р — = / (Е, U, 8, xd,
Хд). Электромагнитный момент М =
P/Q = = рР/со пропорционален мощности
Р, и поэтому зависимость М = — f (E,
U, 0, xd, xq)
имеет подобный же вид.
В выражение (35-4) необходимо подставлять
насыщенные значения xd
и xq, соответствующие
величине результирующей э. д. с. £б при
данном режиме, и значение Е по
спрямленной насыщенной х. х. х.,
соответствующей этому же значению Е&.
Учитывая, что значение хоа1
относительно мало, можно принять Е&
да U. Равенством (35-4) можно
пользоваться также тогда, когда под U
понимается напряжение не на зажимах
машины, а в какой-нибудь более удаленной
точке линии, соединенной с машиной
(например, за повышающим трансформатором,
на приемном конце линии и т. д.). В этом
случае в величины xd и
хд нужно включить
также индуктивное сопротивление линии
до рассматриваемой точки. Угол нагрузки
8 во всех случаях измеряется между э. д.
с. от поля возбуждения генератора Е и
рассматриваемым напряжением U.
Неявнополюсная
машина. Понятие о статической устойчивости.
Далее будем предполагать, что
машина работает параллельно с сетью
бесконечной мощности и поэтому U =
const, / = const и ток возбуждения генератора
не изменяется. Для простоты предположим
также, что цс = const и, следовательно,
xd = const и xq
= = const.
У неявнополюсной машины xq
= xd и на основании
выражения (35-4)

При указанных предположениях Р = /
(8), согласно равенству (35-5), представляет
собой синусоиду (рис. 35-8, а). Полуволны
Р > 0 соответствуют генераторному
режиму работы и полуволны Р < 0 —
двигательному. Как следует из рис. 35-8,
а, при беспрерывном изменении 8
синхронная машина попеременно переходит
из генераторного режима работы в
двигательный и обратно. Такое изменение
8 означает, что ротор машины вращается
несинхронно — несколько быстрее или
несколько медленнее поля реакции якоря.
Зависимость Р = f (в) на рис. 35-8, а
при этом действительна только при
бесконечно медленном изменении 8, когда
в результате несинхронного вращения
ротора в цепях индуктора не индуктируется
никаких токов.
Изменение угла 8 на величину 2я означает,
что ротор машины передвинулся относительно
поля статора на два полюса. Режим
работы машины при этом, как это ясно из
физических соображений, равенств (35-4),
(35-5) и рис. 35-8, а, не изменяется. Поэтому
достаточно рассмотреть угловую
характеристику в пределах — я sS; е <
я. Диапазон — я sc; б «S 0 соответствует
двигательному, а диапазон 0 ==с 6 «S л —
генераторному режиму. Так как полупериоды
синусоидальной кривой симметричны, то
свойства синхронной машины в двигательном
и генераторном режимах аналогичны.
Поэтому ниже рассмотрим режим генератора
(рис. 35-9). Согласно рис. 35-9, при увеличении
Р от нуля угол 6 будет расти от 6 = 0 и
при критическом угле нагрузки 6кр
= 90° достигается максимальная мощность
Р — Рт, которую способен
развить генератор. На основании выражения
(35-5) для неявнопо-люсной машины
Как видно из равенства (35-6), Рт
тем больше, чем больше Е или ток
возбуждения машины, чем больше U и
чем меньше*<*. По этой причине-с целью
уменьшения xd в синхрон-
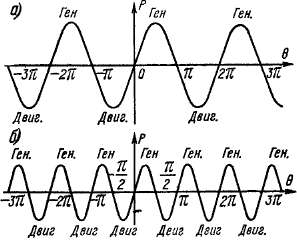
Рис 35-8 Угловые
характеристики активной мощности
неявнополюсной (а) и реактивной (б)
синхронной
машины
ных машинах зазор выполняется больше,
чем в асинхронных машинах.
В установившемся режиме работы генератора
механическая’ мощность Рп
д, развиваемая первичным
двигателем, равна электрической мощности
Р, отдаваемой генератором в сеть,
т. е. Рп д = Р.
При этом под Рп. д следует
понимать мощность первичного двигателя
за вычетом механических и магнитных
потерь в генераторе (при га
= О электрические потери в якоре равны
нулю). Мощность Рп д
не зависит от угла б и поэтому изображена
на рис. 35-9 горизонтальной прямой, которая
пересекается с характеристикой
электрической мощности Р — f (6) в
точках / и 2. В этих точках Рп.
д = Р, и, следовательно, обе они
могли бы соответствовать нормальному
установившемуся режиму работы. Однако
устойчивой является только работа в
точке /.
Действительно, если при работе в точке
/ рис. 35-9 в результате небольшого
случайного преходящего возмущения угол
8 увеличится на Де, то электрическая
мощность генератора превысит
мощность первичного
двигателя на АР. Вследствие этого на
валу будет действовать избыточный
тормозящий электромагнитный момент
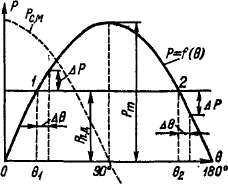
Рис. 35-9. Угловая
характеристика
активной мощности
неявнополюс-
ного синхронного
генератора
и ротор генератора
будет притормаживаться. Угол е будет
уменьшаться, и восстановится устойчивый
установившийся режим работы в точке /.
Если при работе в точке 1
угол 6 в
результате случайного возмущения
уменьшится, то при прекращении действия
этого возмущения генератор также
вернется в режим работы в точке 1.
Если же при работе
в точке 2 рис.
35-9 угол е увеличится на Дб, то мощность
генератора будет на АР
меньше
мощности турбины, ротор будет ускоряться,
угол 8 возрастет еще больше и т. д. В
результате генератор выйдет из синхронизма
или при благоприятных условиях перейдет
в устойчивый режим работы на последующих
положительных полуволнах кривой рис.
35-8, а после
«проскальзывания» ротора на четное
число полюсных делений. Если же при
работе в точке 2
угол 6
уменьшится,
то вследствие
нарушения баланса мощностей этот угол
будет уменьшаться и далее, пока этот
баланс не восстановится в точке 1.
Таким образом,
работа неявнополюсного генератора
устойчива в области 0 •< 6 <С 90° и
неустойчива в области 90° < 6 < 180°.
Аналогичным образом
можно установить, что неявнополюс-ный
синхронный двигатель работает устойчиво
в области 0 > 8 > —90°.
Рассмотренные
здесь вопросы относятся к области так
называемой статической устойчивости
синхронной машины.
Режим работы
определенной установки называется
статически устойчивым, если при наличии
весьма небольших возмущений режима
работы (небольшое изменение U,
Рп-
д,
if и
т. д.) изменения режима работы (величина
9, Рит. д.) также будут небольшими и при
прекращении действия этих возмущений
восстановится прежний режим работы. Из
сказанного
![]()
выше следует, что режим работы синхронной
машины статически устойчив, если

Невозбужденная явнополюсная машина.
Если if = 0, то и Е = О,
так как в нормальных машинах э д с. от
остаточного магнитного потока пренебрежимо
мала. В этом случае на основании выражения
(35-4)
Зависимость Р = f (б), согласно равенству
(35-10), представляет собой синусоиду с
удвоенной частотой (рис. 35-8, б).
Из равенства (35-10) и рис. 35-8, б следует,
что явнополюсная машина в состоянии
развивать мощность при синхронном
режиме
работы также без возбуждения. Устойчивая
работа в режиме генератора происходит
при 0 < е < 45°, а в режиме двигателя —
при — 45° < 6 < 0°. Пределу устойчивой
работы соответствует е кр = ± 45°
вместо 8кр = ± 90° в предыдущем
случае.
В рассматриваемом случае в машине
существует только поток реакции якоря.
При цилиндрическом

Рис 35-10 Картины
магнитного поля невозбужденной синхронной
машины
р
роторе (рис. 35-10, а), когда x<i — xq,
положение ротора относительно
вращающегося поля реакции якоря
безразлично, поэтому машина не развивает
электромагнитного момента и мощности.
В явнополюсной машине ротор стремится
занять по отношению к вращающемуся полю
положение, при котором сопротивление
магнитному потоку и энергия магнитного
поля минимальны. Если при этом приложенный
к валу момент Мст = 0, то 6=0 (рис.
35-10, б) и электромагнитный момент,
действующий на ротор, также равен нулю.
При этом, согласно равенству (35-10), также
Р — 0. Если вал нагружен внешним
моментом, то положение ротора относительно
поля смещается, 9 Ф 0

и в машине развиваются электромагнитный
момент и активная мощность (рис. 35-10, в).
Так как сам ротор не намагничен, то
поворот ротора относительно поля на
180° не приводит к изменению режима, как
это и следует из рис. 35-8, б.
У невозбужденной явнополюсной машины
электромагнитный момент развивается
исключительно вследствие действия поля
реакции якоря при наличии неравномерности
воздушного зазора (ха
=£■ Хд) и называется поэтому реактивным
(см. также § 25-4).
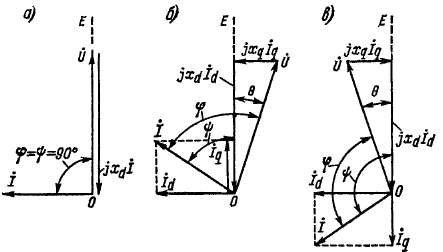
Рис. 35-11. Векторные
диаграммы реактивной синхронной машины
при работе на холостом ходу (а), в режиме
генератора (б) и двигателя (в)
Реактивный режим работы может возникнуть,
например, в случае, когда при параллельной
работе с сетью явнополюсный генератор
по какой-либо причине теряет возбуждение
(неисправность возбудителя, ложное
срабатывание автомата гашения поля и
т. д.) и был при этом слабо загружен.
Последнее обстоятельство существенно
потому, что предельная мощность, которую
может развить генератор в этом режиме,
невелика. Действительно, по формуле
(35-10) в относительных единицах получим
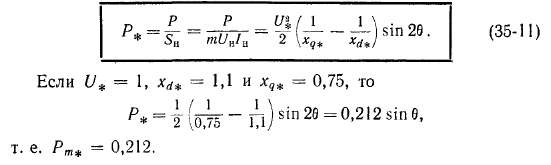
Машина в этом
режиме потребляет большой реактивный
ток для создания магнитного поля. На
холостом ходу (6=0)
/ = U/xd
и, например,, при U* = 1 и xd*
= 1,1 будет /* = 0,91.
Строятся также синхронные двигатели
малой мощности, лишенные обмотки
возбуждения и называемые реактивными
(см. § 41-3).
На рис. 35-11 изображены векторные диаграммы
явно-полюсной машины при работе без
возбуждения, причем штриховой линией
показано направление э. д с. Е, которая
индуктировалась бы при наличии
возбуждения. При этом, как и в гл. 33, на
диаграммах представлены токи, отдаваемые
машиной в сеть. В соответствии с этим
на рис 35-11, как и в режиме недовозбуждения
(Е < U), ток опережает напряжение.
Возбужденная явнополюс-ная машина. В
этом случае оба члена равенства (35-4)
отличны от нуля и машина развивает
мощность как за счет электромагнитного
момента, создаваемого с участием потока
возбуждения,
так и за счет реактивного электромагнитного
момента. На рис. 35-12 изображены кривые
1 и 2 обеих составляющих мощности и
кривая 3 суммарной мощности.
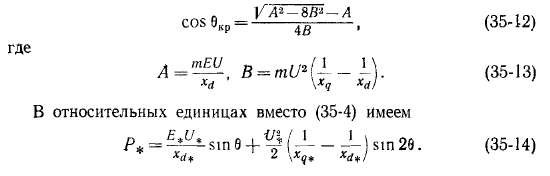
Максимальная мощность и предел
устойчивости работы в данном случае
наступают при критическом угле бкр.
значение которого определяется равенством
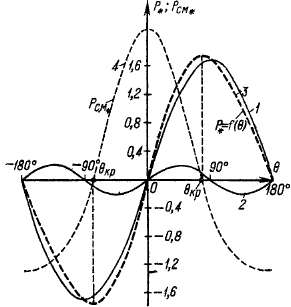
Рис 35-12 Угловая
характеристика активной мощности
возбужденного явнополюс-ного генератора
при Е^ =
1,87, £/„ = 1, *<**= 1-1. *?* = 0,75
Вторая составляющая мощности в данном
случае равна 19% от всей мощности. Таким
образом, в нормальных режимах работы
эта составляющая сравнительно мала. У
генератора с приведенными данными при
£„. = 1,87 и U% = 1 критический угол
нагрузки 8кр = 77° и предельная
мощность Рт* = 1,75, т.
,е. примерно в два раза больше номинальной
активной мощности (/>„ = 0,8).
Угловая
характеристика реактивной
мощности. Наряду с рассмотренными
выше^характеристиками активной мощности
представляют интерес также угловые
характеристики реактивной мощности Q.
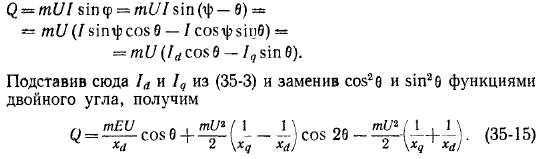
Реактивная мощность
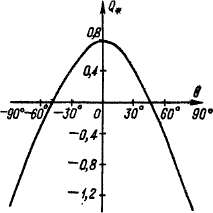
Рис. 35-13. Угловая
характеристика реактивной мощности
явнополюсного генератора
Так как косинус — функция четная, то
при прочих равных условиях эта
характеристика для режимов генератора
и двигателя одинакова.
Кривая Q# — f (б) по формуле (35-15) для
перевозбужденной синхронной машины
при Е* — 1,87, £/„ = 1, ха*
= 1,1, х?* = = 0,75 изображена на рис.
35-13. Из этой кривой видно, что если при
6=0 генератор отдает в сеть реактивную
мощность, то с увеличением 6 величина Q
начинает падать и при некотором б
изменяет знак, т. е. машина начинает
потреблять реактивную мощность из сети.
Это является следствием того, что при
Е = const и U = const в случае увеличения
активной нагрузки вектор / непрерывно
поворачивается против часовой стрелки
и при некотором 8 начинает опережать 0.
Такой характер изменения / следует
из рассмотрения векторных диаграмм
рис. 33-2, 33-3 и др.
Рассмотренные выше выражения угловых
характеристик дают правильные результаты,
если в них подставляются насыщенные
значения параметров. Поскольку эти
значения в большинстве случаев неизвестны,
то расчеты по этим выражениям часто
выполняются при подстановке ненасыщенных
значений параметров. При этом значения
максимальной мощности получаются
заниженными на 8—12%, а значения углов
бкр — завышенными на 8—15%. Значение
угла 9 при Р = Рн также получается
завышенным.
§ 35-4. Синхронизирующая мощность,
синхронизирующий момент и статическая
перегружаемость синхронных машин
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Рассмотрим простейшую схему электропередачи, состоящую из генератора электростанции, повышающего трансформатора, линии электропередачи и шин приемной системы. Введем допущение о том, что приемная система обладает бесконечной мощностью, так что любое изменение режима рассматриваемой электропередачи не вызовет изменения напряжения на шинах приемной системы и частоты. Дополнительно к выше написанному допущению пренебрежем активным сопротивлением элементов электропередачи, емкостью линии и токами намагничивания трансформаторов.
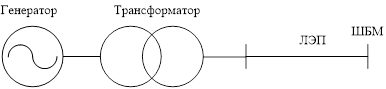
Рис.1. Расчетная схема
Режим работы генератора в установившемся режиме работы описывается следующим уравнением:
![]()
![]() ,
,
где ![]() — вспомогательная ЭДС;
— вспомогательная ЭДС;
![]() — синхронная ЭДС статора.
— синхронная ЭДС статора.

Рис.2. Схема замещения расчетной цепи
Построим векторную диаграмму для соответствующей схемы замещения.
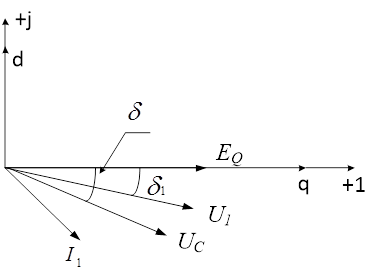
Рис.3. Векторная диаграмма
При выполнении расчетом в дальнейшем за вещественную ось выбрана ось q, а за мнимую — ось d.
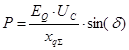
Полная электрическая мощность выдаваемая в сеть от генератора определяется по формуле:
![]() (о.е.)
(о.е.)
Примечание: В именованных единицах формулы для определения мощности выглядит следующим образом: ![]() (и.е.), однако при выводе последующих формул используется формула
(и.е.), однако при выводе последующих формул используется формула ![]() , которая связывает параметры в относительных единицах. В качестве базисных величин выбраны следующие переменные: линейное напряжение и фазный ток. В результате при переводе формулы из именованных единиц в относительные единицы получим запись:
, которая связывает параметры в относительных единицах. В качестве базисных величин выбраны следующие переменные: линейное напряжение и фазный ток. В результате при переводе формулы из именованных единиц в относительные единицы получим запись: ![]() (о.е.).
(о.е.).
Преобразуем формулу для определения полной мощности к зависимости передаваемой мощности от параметров схемы замещения, значений напряжений в узлах расчетной схемы и взаимного угла между векторами напряжения (δ).
Ток, который передается от генератора можно определить исходя из второго закона Кирхгофа:
![]()
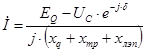 ,
,
где ![]() .
.
Подставляю в формулу для мощности выражение для определения сопряженного тока, получим следующую запись:
![]()
![]()
![]()

В результате после преобразования была получена формула для определения активной и реактивной мощности от режимных параметров. Рассмотрим выражение для определения активной мощности:

В полученное выражение для мощности входит переменная ![]() , которая не имеет физического смысла. В зависимости от исходной системы возбуждения генератора последнее выражение переписывается в различных формах в зависимости от принятых исходных условий:
, которая не имеет физического смысла. В зависимости от исходной системы возбуждения генератора последнее выражение переписывается в различных формах в зависимости от принятых исходных условий:
— постоянство синхронной ЭДС статора (![]() );
);
— постоянство потокосцепления контура возбуждения (![]() );
);
— постоянное напряжение на зажимах генератора (![]() ).
).
а. Угловая характеристика мощности синхронной машины при постоянстве синхронной ЭДС статора (![]() )
)
Переменная EQ, которая входит в уравнения для определения активной мощности ![]() , может быть переписана через переменную Eq следующим образом:
, может быть переписана через переменную Eq следующим образом:
![]() .
.
Найдем выражение для определения тока ![]() . Для этого рассмотрим следующее выражение:
. Для этого рассмотрим следующее выражение:
![]()
![]()
Выразим ток ![]() подставляя в ранее полученное выражение уравнения, которые описывают установившийся режим работы синхронной машины (
подставляя в ранее полученное выражение уравнения, которые описывают установившийся режим работы синхронной машины (![]() ,
, ![]() ). В результате подстановки получим:
). В результате подстановки получим:
 ;
;
![]() .
.
Подставим полученное выражение для определения ![]() в уравнение EQ с учетом соотношения
в уравнение EQ с учетом соотношения ![]() . В результате подстановки получим:
. В результате подстановки получим:


Полученное выражение определяет закон изменения ЭДС EQ при условии постоянства синхронной ЭДС статора.
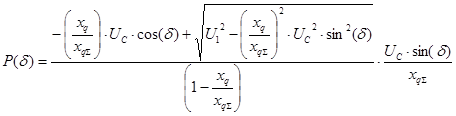
Далее преобразуем выражение для определения активной мощности с помощью полученного выражения ![]() :
:


Полученное выражение носит название угловой характеристика мощности синхронной машины при постоянстве синхронной ЭДС статора.
Полученная формула показывает, что в общем случае при ![]() характеристика мощности содержит кроме основной синусоидальной составляющей мощности также составляющую двойного угла. Амплитуда составляющей мощности двойного угла обычно не велика. Так, например, при работе машины непосредственно на шины бесконечной мощности при
характеристика мощности содержит кроме основной синусоидальной составляющей мощности также составляющую двойного угла. Амплитуда составляющей мощности двойного угла обычно не велика. Так, например, при работе машины непосредственно на шины бесконечной мощности при ![]() ,
, ![]() ,
, ![]() ,
, ![]() , составляющая двойного угла равна 18% от амплитуды основной составляющей. Наличие реактивности внешней сети заметно уменьшает эту цифру: если
, составляющая двойного угла равна 18% от амплитуды основной составляющей. Наличие реактивности внешней сети заметно уменьшает эту цифру: если ![]() то указанное соотношение составляет 13%, 10% и 7,1 %.
то указанное соотношение составляет 13%, 10% и 7,1 %.
Рассмотрим в качестве примера турбогенератор со следующими параметрами:
![]() МВт,
МВт, ![]() ,
, ![]() кВ
кВ
![]() ,
, ![]() ,
, ![]() ,
, ![]()
Для данной модели генератора определим зависимость электромагнитной мощности от угла δ при сопротивлении ![]() (о.е.). В качестве базисных величин будем использовать полную мощность генератора и генераторное напряжение. Перед построением угловой характеристики мощности необходимо определить значение параметра Eq и угол δ при заданных номинальных параметров генератора.
(о.е.). В качестве базисных величин будем использовать полную мощность генератора и генераторное напряжение. Перед построением угловой характеристики мощности необходимо определить значение параметра Eq и угол δ при заданных номинальных параметров генератора.

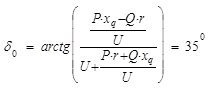
![]()
![]()
Зависимость электромагнитной мощности от угла ![]() при
при ![]() имеет вид представленный на рис.4.
имеет вид представленный на рис.4.
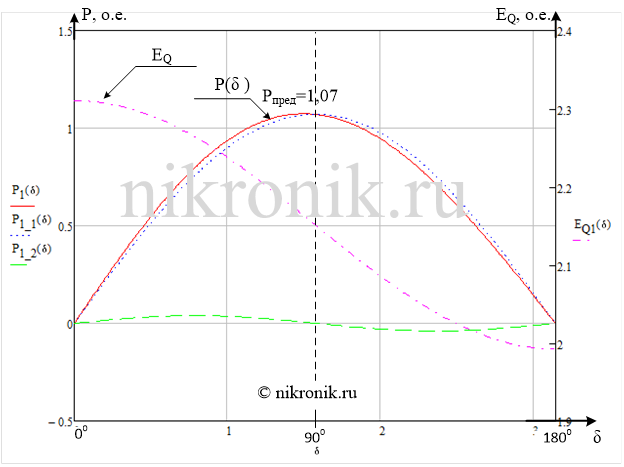
Рис.4. Угловая характеристика мощности при постоянстве синхронной ЭДС статора, а также зависимость изменения EQ.
Как видно из рисунка, максимальная мощность соответствует углу несколько меньшему, чем 90 градусов и мало отличатся от мощности, определяемой основной синусоидальной составляющей. Поэтому при ориентировочных расчетах обычно пренебрегают влиянием неявнополюности машины.
Для данного рассматриваемого случая получили, что изменение активной мощности в диапазоне от 0 до 1,07 до 0 (о.е.), а вспомогательной ЭДС EQ меняется от значения 2,31 до значения 1,99 (о.е.).
б. Угловая характеристика мощности синхронной машины при постоянстве потокосцепления контура возбуждения (![]() )
)
Переменная ![]() , которая входит в уравнения для определения активной мощности
, которая входит в уравнения для определения активной мощности ![]() , может быть переписана через переменную
, может быть переписана через переменную ![]() следующим образом:
следующим образом:
![]() .
.
Поскольку данная формула полностью аналогична формуле записанной ранее для определения ![]() , то выражение для мощности можно записать следующее (делая соответствующие замены параметров
, то выражение для мощности можно записать следующее (делая соответствующие замены параметров ![]() и
и ![]() на новые
на новые ![]() и
и ![]() соответственно):
соответственно):

Полученное выражение определяет закон изменения ЭДС EQ при постоянстве потокосцепления контура возбуждения..

Полученное выражение носит название угловой характеристика мощности синхронной машины при постоянстве потокосцепления контура возбуждения.
Поскольку вторая составляющая выражения при углах от 0 до пи/2 отрицательна, то максимум угловой характеристики в случае ![]() достигается при угле больше пи/2 и превышает максимальное значение мощности, отвечающее условию
достигается при угле больше пи/2 и превышает максимальное значение мощности, отвечающее условию ![]() .
.
Рассмотрим в качестве примера турбогенератор со следующими параметрами (аналогично предыдущему случаю):
![]() МВт,
МВт, ![]() ,
, ![]() кВ
кВ
![]() ,
, ![]() ,
, ![]() ,
, ![]()
Для данной модели генератора определим зависимость электромагнитной мощности от угла δ при сопротивлении ![]() (о.е.). В качестве базисных величин будем использовать полную мощность генератора и генераторное напряжение. Перед построением угловой характеристики мощности необходимо определить значение параметра E’q и угол δ при заданных номинальных параметров генератора.
(о.е.). В качестве базисных величин будем использовать полную мощность генератора и генераторное напряжение. Перед построением угловой характеристики мощности необходимо определить значение параметра E’q и угол δ при заданных номинальных параметров генератора.
![]()
![]()
Зависимость электромагнитной мощности от угла ![]() при
при ![]() имеет вид представленный на рис.5.
имеет вид представленный на рис.5.
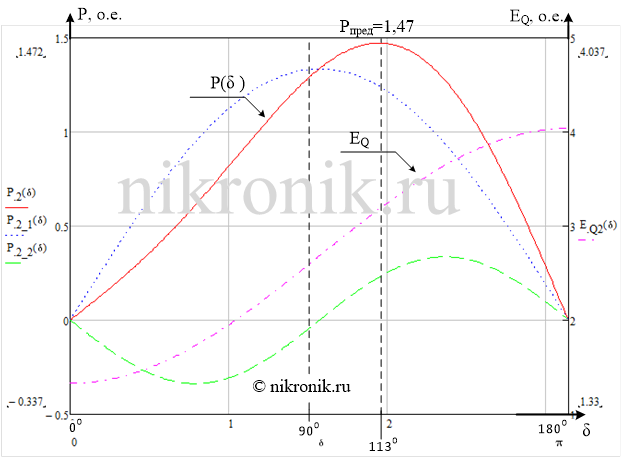
Рис.5. Угловая характеристика мощности при постоянстве потокосцепления контура возбуждения, а также зависимость изменения EQ.
Как видно из рисунка, максимальная мощность соответствует углу большему, чем 90 градусов.
Для данного рассматриваемого случая получили, что изменение активной мощности в диапазоне от 0 до 1,47 до 0 (о.е.), а вспомогательной ЭДС EQ меняется от значения 1,33 до значения 4,03 (о.е.).
в. Угловая характеристика мощности синхронной машины при постоянном напряжении на зажимах генератора (![]() )
)
Для представленной ранее схемы замещения можно записать следующую систему уравнений:
![]()
![]()
П.1. Первое уравнение из записанной системы можно переписать в следующем виде:
![]()
![]()
Полученное выражение в комплексной форме можно разложить на следующую равносильную систему уравнений:
![]()
![]()
Для того, чтобы избавиться от угла ![]() , возведем данную систему уравнений в квадрат и сложим оба уравнения:
, возведем данную систему уравнений в квадрат и сложим оба уравнения:
![]()
Определим токи ![]() и
и ![]() , для этого рассмотрим следующие уравнение (см. П.2).
, для этого рассмотрим следующие уравнение (см. П.2).
П.2. Второе уравнение из записанной системы можно переписать в следующем виде:
![]()
В результате получим следующую систему уравнений:
![]()
![]()
Из данной системы уравнений выразим токи ![]() и
и ![]() :
:
![]()
![]()
П.3.Подставим полученные значения ![]() и
и ![]() в уравнение, полученное по П.1.:
в уравнение, полученное по П.1.:



В результате преобразований получили квадратное уравнение относительно переменной EQ. Корни квадратного уравнения ![]() определяются по формуле:
определяются по формуле:
![]()
В данном случае неизвестная EQ определяется следующим образом:
После аналитического преобразования, а также с учетом того, что физический смысл имеет только знак «+» получаем следующее выражение:
Полученное выражение дает закон изменения вспомогательной ЭДС EQ, необходимый для поддержания напряжения на шинах генератора ![]() .
.
Далее преобразуем выражение для определения активной мощности с помощью полученного выражения EQ:
Полученное выражение носит название угловой характеристика мощности синхронной машины при постоянном напряжении на зажимах генератора.
Рассмотрим в качестве примера турбогенератор со следующими параметрами (аналогично предыдущему случаю):
![]() МВт,
МВт, ![]() ,
, ![]() кВ
кВ
![]() ,
, ![]() ,
, ![]() ,
, ![]()
Для данной модели генератора определим зависимость электромагнитной мощности от угла δ при сопротивлении ![]() (о.е.). В качестве базисных величин будем использовать полную мощность генератора и генераторное напряжение.
(о.е.). В качестве базисных величин будем использовать полную мощность генератора и генераторное напряжение.
Зависимость электромагнитной мощности от угла δ при постоянном напряжении на зажимах генератора имеет вид представленный на рис.6.
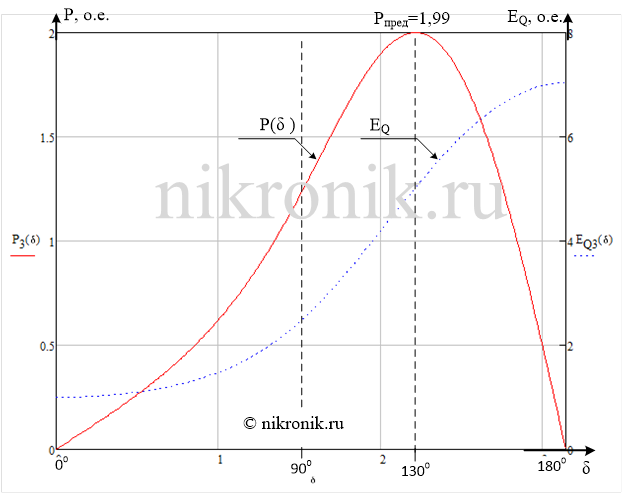
Рис.6. Угловая характеристика мощности при постоянном напряжении на зажимах генератора, а также зависимость изменения EQ.
Как видно из рисунка, максимальная мощность соответствует углу намного большему, чем 90 градусов.
Для данного рассматриваемого случая получили, что изменение активной мощности происходит в диапазоне от 0 до 1,99 до 0 (о.е.), а вспомогательной ЭДС EQ меняется от значения 1 до значения 7,04 (о.е.).
Общие выводы
Как видно из полученных расчетов, в зависимости от принятых условий, предел передаваемой мощности и угол различен. Следует отметить, что каждый рассмотренный случай соответствует своему типу регулирования синхронной машины:
— Постоянство синхронной ЭДС статора говорит о неизменном токе возбуждения (в установившемся режиме работы), что в свою очередь соответствует случаю отсутствия на эквивалентном генераторе автоматического регулятора возбуждения.
— Постоянство потокосцепления контура возбуждения соответствует случаю, когда на эквивалентном генераторе установлен автоматический регулятор возбуждения пропорционального действия.
— Постоянство напряжении на зажимах генератора обеспечивается за счет применения на эквивалентном генераторе автоматического регулятора возбуждения сильного действия. Данный регулятор (АРВ СД) отличается от АРВ ПД тем, что в закон регулирования возбуждения вводятся производные изменения параметров режима, которые обеспечивают расширение области устойчивости до еще больших значений угла δ, чем при пропорциональном регулировании.
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Сегодня особенно широко распространены в промышленности именно асинхронные электродвигатели, поэтому на их характеристиках и остановимся. Для примера рассмотрим АИР80В2У3.
Номинальная механическая мощность асинхронного электродвигателя
На шильдике (на паспортной табличке) электродвигателя указывается всегда номинальная механическая мощность на валу данного двигателя. Это не та электрическая мощность, которую данный электродвигатель потребляет из сети.
Так, например, для двигателя АИР80В2У3, номинал в 2200 ватт соответствует именно механической мощности на валу. То есть в оптимальном рабочем режиме данный двигатель способен выполнять механическую работу 2200 джоулей каждую секунду. Обозначим эту мощность как P1 = 2200 Вт.

Номинальная активная электрическая мощность асинхронного электродвигателя
Чтобы определить номинальную активную электрическую мощность асинхронного электродвигателя, опираясь на данные с шильдика, необходимо принять в расчет КПД. Так, для данного электродвигателя КПД составляет 83%.

Что это значит? Это значит, что только часть активной мощности, подаваемой из сети на обмотки статора двигателя, и безвозвратно потребляемой двигателем, преобразуется в механическую мощность на валу. Активная мощность равна P = P1/КПД. Для нашего примера, по представленному шильдику видим, что P1 = 2200, КПД = 83%. Значит P = 2200/0,83 = 2650 Вт.
Номинальная полная электрическая мощность асинхронного электродвигателя
Полная электрическая мощность, подаваемая на статор электродвигателя от сети всегда больше механической мощности на валу и больше активной мощности, безвозвратно потребляемой электродвигателем.

Для нахождения полной мощности достаточно активную мощность разделить на косинус фи. Таким образом, полная мощность S = P/Cosφ. Для нашего примера P = 2650 Вт, Cosφ = 0,87. Следовательно полная мощность S = 2650/0,87 = 3046 ВА.
Номинальная реактивная электрическая мощность асинхронного электродвигателя
Часть полной мощности, подаваемой на обмотки статора асинхронного электродвигателя, возвращается в сеть. Это реактивная мощность Q.
Реактивная мощность связана с полной мощностью через sinφ, и связана с активной и с полной мощностью через квадратный корень. Для нашего примера:
Q = √( 3046 2 – 2650 2 ) = 1502 ВАР
Реактивная мощность Q измеряется в ВАР — в вольт-амперах реактивных.
Теперь давайте рассмотрим механические характеристики нашего асинхронного двигателя: номинальный рабочий момент на валу, угловую скорость, линейную скорость, частоту вращения ротора и ее связь с частотой питания электродвигателя.
Частота вращения ротора асинхронного электродвигателя
На шильдике мы видим, что при питании переменным током частотой в 50 Гц, ротор двигателя совершает при номинальной нагрузке 2870 оборотов в минуту, обозначим эту частоту как n1.

Что это значит? Поскольку магнитное поле в обмотках статора создается переменным током частотой 50 Гц, то для двигателя с одной парой полюсов (коим является АИР80В2У3) частота «вращения» магнитного поля, синхронная частота n, оказывается равной 3000 оборотов в минуту, что тождественно 50 оборотам в секунду. Но поскольку двигатель асинхронный, то ротор вращается с отставанием на величину скольжения s.
Значение s можно определить, разделив разность синхронной и асинхронной частот на синхронную частоту, и выразив это значение в процентах:
s = ( ( n – n1 )/ n) *100%
Для нашего примера s = ( (3000 – 2870)/3000 ) *100% = 4,3%.
Угловая скорость асинхронного двигателя

Угловая скорость ω выражается в радианах в секунду. Для определения угловой скорости достаточно частоту вращения ротора n1 перевести в обороты в секунду (f), и умножить на 2 Пи, поскольку один полный оборот составляет 2 Пи или 2*3,14159 радиан. Для двигателя АИР80В2У3 асинхронная частота n1 составляет 2870 оборотов в минуту, что соответствует 2870/60 = 47,833 оборотам в секунду.
Понятие мощности электродвигателя
Мощность – пожалуй, самый важный параметр при выборе электродвигателя. Традиционно она указывается в киловаттах (кВт), у импортных моделей – в киловаттах и лошадиных силах (л.с., HP, Horse Power). Для справки: 1 л.с. приблизительно равна 0,75 кВт.
На шильдике двигателя указана номинальная полезная (отдаваемая механическая) мощность
. Это та мощность, которую двигатель может отдавать механической нагрузке с заявленными параметрами без перегрева. В формулах номинальная механическая мощность обозначается через Р2.
Электрическая (потребляемая) мощность
двигателя Р1 всегда больше отдаваемой Р2, поскольку в любом устройстве преобразования энергии существуют потери. Основные потери в электродвигателе – механические, обусловленные трением. Как известно из курса физики, потери в любом устройстве определяются через КПД (ƞ), который всегда менее 100%. В данном случае справедлива формула:
Р2 = Р1 · ƞ
КПД в двигателях зависит от номинальной мощности – у маломощных моделей он может быть менее 0,75, у мощных превышает 0,95. Приведенная формула справедлива для активной потребляемой мощности. Но, поскольку электродвигатель является активно-реактивной нагрузкой, для расчета полной потребляемой мощности S
(с учетом реактивной составляющей) нужно учитывать реактивные потери. Реактивная составляющая выражается через коэффициент мощности (cosϕ). С её учетом формула номинальной мощности двигателя выглядит так:
Р2 = Р1 · ƞ = S · ƞ · cosϕ
Формула механической мощности
Термин «мощность» в физике имеет специфический смысл. Механическая работа может выполняться с различной скоростью. А механическая мощность обозначает, как быстро совершается эта работа. Способность правильно измерить мощность имеет важное значение для использования энергетических ресурсов.

Физический смысл мощности
Мощность и нагрев двигателя
Номинальная мощность обычно указывается для температуры окружающей среды 40°С и ограничена предельной температурой нагрева. Поскольку самым слабым местом в двигателе с точки зрения перегрева является изоляция, мощность ограничивается классом изоляции обмотки статора. Например, для наиболее распространенного класса изоляции F допустимый нагрев составляет 155°С при температуре окружающей среды 40°С.
В документации на электродвигатели приводятся данные, из которых видно, что номинальная мощность двигателя падает при повышении температуры окружающей среды. С другой стороны, при должном охлаждении двигатели могут длительное время работать на мощности выше номинала.
Мы рассмотрели потребляемую и отдаваемую мощности, но следует сказать, что реальная рабочая потребляемая мощность P
(мощность на валу двигателя в данный момент) всегда должна быть меньше номинальной:
Р 2 1
Это необходимо для предотвращения перегрева двигателя и наличия запаса по перегрузке. Кратковременные перегрузки допустимы, но они ограничены прежде всего нагревом двигателя. Защиту двигателя по перегрузке также желательно устанавливать не по номинальному току (который прямо пропорционален мощности), а исходя из реального рабочего тока.
Современные производители в основном выпускают двигатели из ряда номиналов: 1,5, 2,2, 5,5, 7,5, 11, 15, 18,5, 22 кВт и т.д.
Разные виды мощности
Для формулы механической мощности применяется следующее выражение:
В числителе формулы затраченная работа, в знаменателе – временной промежуток ее совершения. Это отношение и называется мощностью.
Существует три величины, которыми можно выразить мощность: мгновенная, средняя и пиковая:
- Мгновенная мощность – мощностной показатель, измеренный в данный момент времени. Если рассмотреть уравнение для мощности N = ΔA/Δt , то мгновенная мощность представляет собой ту, которая берется в чрезвычайно малый промежуток времени Δt. Если имеется построенная графическая зависимость мощности от времени, то мгновенная мощность – это просто считываемое с графика значение в любой взятый момент времени. Другая запись выражения для мгновенной мощности:
- Средняя мощность – мощностная величина, измеренная за относительно большой временной отрезок Δt;
- Пиковая мощность – максимальное значение, которое мгновенная мощность может иметь в конкретной системе в течение определенного временного промежутка. Стереосистемы и двигатели автомобилей – примеры устройств, способных обеспечить максимальную мощность, намного выше их средней номинальной мощности. Однако поддерживать эту мощностную величину можно в течение короткого времени. Хотя для эксплуатационных характеристик устройств она может быть более важной, чем средняя мощность.
Важно! Дифференциальная форма уравнения N = dA/dt универсальна. Если механическая работа выполняется равномерно в течение времени t, то средняя мощность будет равна мгновенной.
Из общего уравнения получается запись:
где A будет общая работа за заданное время t. Тогда при равномерной работе вычисленный показатель равен мгновенной мощности, а при неравномерной –средней.

Формулы для механической мощности
Расчет мощности двигателя на основе измерений
На практике мощность двигателя можно рассчитать, прежде всего, исходя из рабочего тока. Ток измеряется токовыми клещами в максимальном рабочем режиме, когда рабочая мощность приближается к номинальной. При этом температура корпуса двигателя может превышать 100 °С, в зависимости от класса нагревостойкости изоляции.
Измеренный ток подставляем в формулу для расчета реальной механической мощности
на валу:
Р = 1,73 · U · I · cosϕ · ƞ
, где
- U – напряжение питания (380 или 220 В, в зависимости от схемы подключения – «звезда» или «треугольник»),
- I – измеренный ток,
- cosϕ и ƞ – коэффициент мощности и КПД, значения которых можно принять равными 0,8 для маломощных двигателей (менее 5,5 кВт) или 0,9 для двигателей мощностью более 15 кВт.
Если нужно найти номинальную мощность
двигателя, то полученный результат округляем в бОльшую сторону до ближайшего значения из ряда номиналов.
Р2 > Р
Если необходимо рассчитать потребляемую активную мощность
, используем следующую формулу:
Р1 = 1,73 · U · I · ƞ
Именно активную мощность измеряют счетчики электроэнергии. В промышленности для измерения реактивной (и полной мощности S) применяют дополнительное оборудование. При данном способе можно не использовать приведенную формулу, а поступить проще – если двигатель подключен в «звезду», измеренное значение тока умножаем на 2 и получаем приблизительную мощность в кВт.
Что лучше: мощность или крутящий момент
Мощность и крутящий момент двигателя – величины взаимосвязанные. Это хорошо видно в формуле из первого пункта.
Пик крутящего момента на графике зависимости от частоты вращения мотора появляется раньше, чем пик мощности. Это справедливо как для дизельных, так и для бензиновых моторов. Однако у дизелей крутящий момент достигается раньше, и плато (интервал частоты вращения при пиковом значении) длиннее. У бензиновых ДВС мощность выше, хотя для ее достижения нужно раскрутить мотор почти до максимальных оборотов.
Сказать определенно, что лучше: мощность или крутящий момент, нельзя. Все зависит от случая. Трансмиссия современного авто способна трансформировать эти величины под требуемые условия. Поясним на примерах.
Расчет мощности при помощи счетчика электроэнергии
Этот способ прост и не требует дополнительных инструментов и знаний. Достаточно подключить двигатель через счетчик (трехфазный узел учета) и узнать разницу показаний за строго определенное время. Например, при работе двигателя в течении часа разница показаний счетчика будет численно равна активной мощности двигателя (Р1). Но чтобы получить номинальную мощность Р2, нужно воспользоваться приведенной выше формулой.
Другие полезные материалы:
Степени защиты IP Трехфазный двигатель в однофазной сети Типичные неисправности электродвигателей
Частота вращения ротора
Для вычисления этого параметра электродвигателей нам понадобится частота переменного тока и количество оборотов в минуту при оптимальной нагрузке. Пусть в паспортной табличке указаны следующие данные: частота тока составляет 50 Гц, а количество оборотов – 2800.

Переменный ток создает магнитное поле, которое имеет частоту 50*60=3000 оборотов в секунду. Известно, что электродвигатель асинхронный, а это означает, что наблюдается отставание от номинальной частоты вращения на некоторую величину. Назовем ее скольжением и обозначим за s.

Величина скольжения определяется следующей формулой: s = ((3000 – 2800) / 3000) * 100% = 6,7%.

Асинхронные электрические машины
В них магнитное поле ротора является порождением вращающегося магнитного поля статора. Поскольку между этими деталями машины есть воздушный зазор, передача энергии между ними происходит с потерями. Поэтому фаза тока в роторе отстает от фазы тока в статоре на небольшой угол (не более 100), который определяет величину коэффициента мощности cosφ. Это отставание и является причиной того, что электрическую машину этого типа называют асинхронной.
Двигатели с короткозамкнутым ротором
Обмотка ротора у них – это набор металлических стержней, которые соединяют два кольца. Получившуюся фигуру называют «беличье колесо». В момент подачи напряжения на статорную обмотку в роторе возникает ток короткого замыкания, энергия которого тратится на раскручивании вала и тем самым гасится. У него несколько меньший КПД, чем у синхронных машин, он не превышает 80%.

Для изменения скорости вращения необходимо менять частоту питающего напряжения или количество статорных обмоток, которое определяет количество полюсов электромагнита – чем их больше, тем она ниже. Также электродвигателям с короткозамкнутым ротором свойственен большой пусковой ток, перегружающий сеть, а также резкий рост вращающего момента при подключении питания, что может вызвать поломку редуктора привода.
Двигатели с фазным ротором
Пуск асинхронных двигателей с короткозамкнутым ротором большой мощности (более 30 кВт) связан с чрезвычайной перегрузкой питающей сети. Для устранения этого явления используют машины с фазным ротором, обмотка которых состоит из трех катушек, соединенных звездой. Их концы соединены угольными щетками с тремя контактными кольцами, расположенными на оси двигателя.

Изменяя сопротивление ротора, можно добиться изменения частоты вращения. Достоинством машины такого типа является отсутствие перегрузки в момент запуска и плавное нарастание вращающего момента. Поэтому ее применяют в грузоподъемном оборудовании. Недостаток – сложность устройства и более низкий, чем у машин с короткозамкнутым ротором КПД, он не более 60%.
Нагрузка насосов и типы нагрузки электродвигателя
Выделяют следующие типы нагрузок:
Постоянная мощность
Термин «постоянная мощность» используется для определённых типов нагрузки, в которых требуется меньший вращающий момент при увеличении скорости вращения, и наоборот. Нагрузки при постоянной мощности обычно применяются в металлообработке, например, сверлении, прокатке и т.п.

Постоянный вращающий момент

Переменный вращающий момент и мощность
Вся остальная часть данного раздела будет посвящена исключительно переменному вращающему моменту и мощности.
Определив, что для центробежных насосов типичным является переменный вращающий момент, мы должны проанализировать и оценить некоторые характеристики центробежного насоса. Использование приводов с переменной частотой вращения обусловлено особыми законами физики. В данном случае это законы подобия, которые описывают соотношение между разностями давления и расходами.

Во-первых, подача насоса прямо пропорциональна частоте вращения. Это означает, что если насос будет работать с частотой вращения на 25% больше, подача увеличится на 25%.
Двигатели постоянного тока
Исходя из принципа механики Ньютона, утверждающего, что всякое движение относительно, электродвигатель постоянного тока можно назвать синхронной машиной. Хотя магнитные поля статора и ротора в ней неподвижные, а вращение вала происходит за счет эффекта отталкивания одноименных полюсов магнитов и притягивания разноименных.

На них через угольные щетки подается постоянный ток. Во время вращения вала происходит переключение полюсов между парами. Магнитное поле статора может создаваться металлами с остаточным магнетизмом или прохождением тока по обмоткам. Последние применяются в электрических машинах большой мощности.
Их достоинством является большой коэффициент полезного действия, до 98%, а также стабильно высокий вращающий момент и малая зависимость от перегрузок. Двигатели постоянного тока отлично подходят для привода подъемных механизмов, а также в качестве тяговых на электротранспорте.
Ими очень просто управлять: для снижения скорости вращения надо лишь уменьшить величину подаваемого напряжения, а для реверсирования достаточно сменить полярность. Недостатком является сложность устройства и невысокая надежность щеточного узла, его склонность к искрению и шумность. Кроме того, постоянное напряжение сложно передавать на большие расстояния, из-за чего нет магистральных линий такого типа. Питание придется создавать самостоятельно, используя выпрямительные или инверторные схемы. Также про двигатели постоянного тока можно почитать здесь.
Коллекторные двигатели
По своей конструкции они аналогичны двигателям постоянного тока. Однако питаются переменным однофазным током. Статорная обмотка возбуждения у них включена последовательно с обмоткой якоря. Вращение вала происходит за счет синхронной смены полюсов магнитного поля в статорной и роторной обмотках.
К перечисленным выше достоинствам – большому вращающему моменту, нечувствительности к перегрузкам, стоит отнести и то, что это единственная электрическая машина переменного тока, которой можно без проблем управлять.
Для изменения скорости вращения вала достаточно уменьшить питающее напряжение, а для реверсирования поменять местами точки подключения коллекторного узла со статорной обмоткой. Поэтому коллекторные электродвигатели широко применяются в бытовых электроприборах.
Например, в стиральных машинах, дрелях и другом электрифицированном инструменте. К недостаткам, основным из которых является сложность и малая надежность щеточного узла, стоит отнести и невозможность подключения трехфазного напряжения. Просто потому, что в этом случае щеток должно быть шесть. Это ограничивает максимальную мощность двигателей: у однофазных машин при напряжении 220 вольт это значение не бывает более 2,5 киловатта.
Синхронные электродвигатели переменного тока

Недостатками – сложность пуска и наличие коллектора со щеточным узлом, что снижает их надежность. А также невозможность регулирования частоты вращения. Применяются в установках, которые работают постоянно или с очень длительным рабочим циклом. Например, на перекачивающих станциях или транспортерных лентах.
Определение параметров электродвигателя по табличке
Электродвигатели встречаются в промышленности и быту повсеместно. Если Вы не обращали внимание, то я приведу парочку фото примеров:
Порой возникает необходимость, рожденная будничным любопытством, либо производственной необходимостью в определении мощности электродвигателя по внешнему виду.
Тут возможен вариант, что с него содрана табличка, на которой написаны номинальные параметры, либо же шильдик в таком состоянии, что различить ничего невозможно. Как же быть в такой ситуации…
Номинальная активная электрическая мощность
Следующая характеристика двигателей переменного тока рассчитывается с помощью значения КПД, которое также указано на паспортной табличке. Чем больше КПД, тем больше мощности из сети переводится в механическую мощность движения вала. Допустим, если КПД равен 80%, то номинальная активная мощность равна 2200/0.8 = 2750 Вт.
Параметры электродвигателя №2: потребляемый ток
Для измерения тока, потребляемого электродвигателем, используются токоизмерительные клещи, измеряющие ток в цепи без ее разрыва.
При использовании мультиметра (как пользоваться мультиметром?) или амперметра нужно заранее убедиться в том, что ожидаемое значение измеряемого параметра лежит в диапазоне измерений. Прибор подключается последовательно с электродвигателем или с одной из обмоток трех фаз. И не стоит забывать о пусковом токе, перед запуском прибор нужно надежно закоротить, чтобы он не сгорел.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
- АИР 180 М2 – где 2 это 3000 оборотов.
- АИР 180 М4 – 4 это 1500 об. мин.
- АИР 180 М6 – 6 обозначает частоту вращения 1000 об/мин.
- АИР 180 М8 – 8 означает, что частота вращения выходного вала 750 оборотов.
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.