Расчетные формулы параметров машин постоянного тока
В таблице 1 представлены расчетные формулы для определения основных параметров машин постоянного тока.
В данной таблице собраны все формулы, которые касаются расчета параметров машин постоянного тока.
Таблица 1 — Расчетные формулы для определения основных параметров машин постоянного тока
| Наименование величин | Формулы | Принятые обозначения |
|---|---|---|
| Мощность, кВт |
|
I – ток машины, А; U – внешнее напряжение, В; |
| Ток генератора и двигателя, А |
|
Iа – ток якоря; Iв – ток параллельной обмотки возбуждения, А; |
| Внешнее напряжение, В |
|
∑Ra – сумма сопротивлений якорной цепи, Ом; Е – ЭДС машины, В; |
| ЭДС, В |
|
N – число проводников обмотки якоря; а – число пар параллельных ветвей в обмотке якоря; р – число пар полюсов; n – скорость вращения, об/мин. |
| Сопротивление якорной цепи, Ом |
|
Ф – магнитный поток пары полюсов, вебер; Rя, Rс, Rдоб. – сопротивления обмотки якоря, последовательной обмотки возбуждения и добавочных полюсов, Ом |
| Ориентировочной значение сопротивления цепи якоря, Ом |
|
Значение коэффициента β двигателей различного типа возбуждения: для независимого и параллельного возбуждения β=0,5; для смешанного β=0,6; для последовательного β=0,75; |
| КПД двигателя и генератора |
|
∑∆Р – суммарные потери в машине, кВт; |
| Суммарные потери, кВт |
|
∆Рх – потери холостого хода машины или постоянные потер, кВт; ∆Рв – потери на возбуждение, кВт; ∆Рмех. – механические потери на трение в подшипниках и о коллектор, кВт; ∆Рст. – магнитные потери в стали якоря, кВт; ∆Рвент. – вентиляционные потери, кВт; ∆Рдоб. – добавочные потери. В некомпенсированных машинах ∆Рдоб. = 1%Рном, в компенсированных 0,5%, кВт; kз – коэффициент загрузки; ∆Uщ = 2 В для графитных щеток; ∆Uщ = 0,6 В для металлографитных; |
| Переменные потери |
|
|
| Номинальный вращающий момент, кГм |
|
См – конструктивная постоянная момента; Ф – магнитный поток, вебер; |
| Расчетные коэффициенты для двигателя параллельного возбуждения |
|
|
| Скоростная характеристика двигателя |
|
|
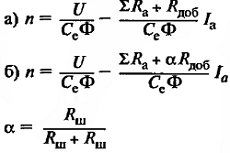
| Искусственные скоростные характеристики |
|
а) искусственная скоростная характеристика при введении добавочного сопротивления Rдоб. последовательно в цепь якоря; б) искусственная скоростная характеристика двигателя при шунтировании якоря двигателя сопротивлением Rш; α – коэффициент шунтирования. |



Литература:
1. Справочная книга электрика. В.И. Григорьева, 2004 г.
Всего наилучшего! До новых встреч на сайте Raschet.info.
КПД генератора, параметры машин постоянного тока, ток генератора, ЭДС
Благодарность:
Если вы нашли ответ на свой вопрос и у вас есть желание отблагодарить автора статьи за его труд, можете воспользоваться платформой для перевода средств «WebMoney Funding» и «PayPal».
Данный проект поддерживается и развивается исключительно на средства от добровольных пожертвований.
Проявив лояльность к сайту, Вы можете перечислить любую сумму денег, тем самым вы поможете улучшить данный сайт, повысить регулярность появления новых интересных статей и оплатить регулярные расходы, такие как: оплата хостинга, доменного имени, SSL-сертификата, зарплата нашим авторам.
Обозначив
![]()
и
используя соотношение

(С-7)
можно
найти активный ток якоря как

; (С-8)
В случае расчетов
без использования ЭВМ допускается
использовать приближенное выражение

(С-9)
3.2. Определение результирующей э.Д.С. И м.Д.С.
Для
результирующей э.д.с.
в
соответствии с диаграммой рис. С-1 имеем

(С-11)
При
расчетах без использования ЭВМ допускается
приближенное выражение
![]()
(С-11)
Разумеется,
что в выражения (10) или (11) следует
подставить
![]()
,
т.е. учитывать опережающий характер
тока якоря.
Для
определения результирующей М.Д.С.
используется «характеристика холостого
хода» синхронной машины (рис.С-2)
Эта
зависимость достаточно точно
апроксимируется выражением
![]()
(С-12),
которое следует
использовать для точного определения
Э.Д.С. по М.Д.С. (или наоборот).
3.3 Определение составляющих м.Д.С. Якоря
Из векторной
диаграммы рис. С-1 следует, что

(C-13)
При
невозможности использования ЭВМ
допускается полагать
0
Тогда угол
выбега ротора в
соответствии с диаграммой может быть
найден как

(с-14)
Приближенное
выражение для :

(С-15)
допускается
при расчетах без использования ЭВМ.
Составляющие
тока якоря ( по осям) определяются как

(С-16)
Необходимо
помнить, что в выражениях (с-13)….(С-17)
составляющая тока якоря
![]()
подставляется
отрицательной; углы
и также являются
отрицательными.
3.4. Определение тока возбуждения
Из диаграммы
рис. С-1 следует, что
![]()
(С-18)
Здесь в
соответствии с (С-16)
![]()
является
также отрицательным.
4. Варианты исполнения сд критерия оптимальности
Математическая
модель СД (6) позволяет, таким образом,
при выбранном значении Рвн
(с учетом разновидности исполнения,
т.е. н и cos
н)
определить основные величины, описывающие
рабочий режим (для любой мощности на
валу Рвт до Рвм):
-
величину тока якоря
;
-
величину тока возбуждения

; -
суммарную мощность потерь
энергии ( с учетом потерь на возбуждение)
![]()
(С-19)
Разумеется, что
определение всех этих (и вспомогательных)
величин возможно, если заданы параметры
СД:
-
значение сопротивлений
и

; -
величина мощности потерь

и

(для іb=іb0);
-
коэффициент приведения
м.д.с. якоря кd;
кaq.
Данные о
параметрах десяти вариантов СД, имеющихся
в распоряжении проектанта, приведены
в таблице С-2.
Считается, что
все варианты имеют равную стоимость
(независимо от разновидности, т.е.
значений н и
cos н)
и одинаковые характеристики холостого
хода (типа С-17), а также
каd=0,9
и каq=0,6
Отличие вариантов
состоит прежде всего в величине
предельного допустимого тока возбуждения
ibmax.
Обращаясь к кривой рис. С-2, можно заметить,
старшие варианты (позволяющие большее
перевозбуждение) обладают меньшей
степенью насыщения стали (поэтому у них
меньше рассеяние полей), но при этом
имеют большие значения сопротивления
якоря.
![]()
(С-20)
В качестве
показателей оптимальности варианта СД
следует использовать величину суммарных
потерь энергии
![]()
(С-21)
Так как по
условию проекта мощность на валу СД
изменяется случайно и может равновероятно
принимать значения Рb
:
![]()
;
то критерием оптимальности СД
можно считать среднее значение суммарной
мощности потерь энергии
![]()
Таким образом,
оптимальным вариантом СД данной
номинальной мощности Рвн
и разновидности (по значениям н
и cos н),
следует считать тот , для которого
выполняются условия:

(С-23)
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Eя = Се * Ф * n (1)
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
U = Eя + Iя * ∑R (2)
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.

Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.

Электромагнитная мощность двигателя
Pэм = Ея Iя (5)
Электромагнитный момент

где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)

Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Р2 — полезная мощность двигателя
Основные уравнения двигателя постоянного тока (ДПТ)
В этой статье описаны основные формулы, величины и их обозначения которые относятся ко всем двигателям постоянного тока.
В результате взаимодействия Iя тока якоря в проводнике L обмотки якоря с внешним магнитным полем возникает электромагнитная сила создающая электромагнитный момент М который приводит якорь во вращение с частотой n.
Противо ЭДС двигателя Eя
При вращении якоря пазовый проводник пресекает линии поля возбуждения с магнитной индукцией B и в соответствии с явлением электромагнитной индукции в проводнике наводится ЭДС Eя направленная навстречу Iя. Поэтому эта ЭДС называется противо ЭДС и она прямо пропорциональна Ф магнитному потоку и частоте вращения n.
Ce — постоянный коэффициент определяемой конструкцией двигателя.
Применив второй закон Кирхгофа получаем уравнение напряжения двигателя.
где ∑R — суммарное сопротивления обмотки якоря включающая сопротивление :
- обмотки якоря
- добавочных полюсов
- обмотки возбуждения (для двигателей с последовательным возбуждением)
Ток якоря Iя
Выразим из формулы 2 ток якоря.
Частота вращения якоря
Из формул 1 и 2 выведем формулу для частоты вращения якоря.
Электромагнитная мощность двигателя
Электромагнитный момент
где: ω = 2*π*f — угловая скорость вращения якоря, Cм — постоянный коэффициент двигателя (включает в себя конструктивные особенности данного двигателя)
Момент на валу двигателя, т.е. полезный момент, где М0 момент холостого хода;
Коллекторный электродвигатель постоянного тока
Конструкция коллекторного электродвигателя постоянного тока
Статор — неподвижная часть двигателя.
Индуктор (система возбуждения) — часть коллекторной машины постоянного тока или синхронной машины, создающая магнитный поток для образования момента. Идуктор обязательно включает либо постоянные магниты либо обмотку возбуждения. Индуктор может быть частью как ротора так и статора. В двигателе, изображенном на рис. 1, система возбуждения состоит из двух постоянных магнитов и входит в состав статора.
Якорь — часть коллекторной машины постоянного тока или синхронной машины, в которой индуктируется электродвижущая сила и протекает ток нагрузки [2]. В качестве якоря может выступать как ротор так и статор. В двигателе, показанном на рис. 1, ротор является якорем.
Щетки — часть электрической цепи, по которой от источника питания электрический ток передается к якорю. Щетки изготавливаются из графита или других материалов. Двигатель постоянного тока содержит одну пару щеток или более. Одна из двух щеток соединяется с положительным, а другая — с отрицательным выводом источника питания.
Коллектор — часть двигателя, контактирующая со щетками. С помощью щеток и коллектора электрический ток распределяется по катушкам обмотки якоря [1].
Типы коллекторных электродвигателей
По конструкции статора коллекторный двигатель может быть с постоянными магнитами и с обмотками возбуждения.
Коллекторный двигатель с постоянными магнитами

Коллекторный двигатель постоянного тока (КДПТ) с постоянными магнитами является наиболее распространенным среди КДПТ. Индуктор этого двигателя включает постоянные магниты, которые создают магнитное поле статора. Коллекторные двигатели постоянного тока с постоянными магнитами (КДПТ ПМ) обычно используются в задачах не требующих больших мощностей. КДПТ ПМ дешевле в производстве, чем коллекторные двигатели с обмотками возбуждения. При этом момент КДПТ ПМ ограничен полем постоянных магнитов статора . КДПТ с постоянными магнитами очень быстро реагирует на изменение напряжения. Благодаря постоянному полю статора легко управлять скоростью двигателя. Недостатком электродвигателя постоянного тока с постоянными магнитами является то, что со временем магниты теряют свои магнитные свойства, в результате чего уменьшается поле статора и снижаются характеристики двигателя.
-
Преимущества:
- лучшее соотношение цена/качество
- высокий момент на низких оборотах
- быстрый отклик на изменение напряжения
-
Недостатки:
- постоянные магниты со временем, а также под воздействием высоких температур теряют свои магнитные свойства
Коллекторный двигатель с обмотками возбуждения
-
По схеме подключения обмотки статора коллекторные электродвигатели с обмотками возбуждения разделяют на двигатели:
- независимого возбуждения
- последовательного возбуждения
- параллельного возбуждения
- смешанного возбуждения




Двигатели независимого и параллельного возбуждения
В электродвигателях независимого возбуждения обмотка возбуждения электрически не связана с обмоткой якоря (рисунок выше). Обычно напряжение возбуждения UОВ отличается от напряжения в цепи якоря U. Если же напряжения равны, то обмотку возбуждения подключают параллельно обмотке якоря. Применение в электроприводе двигателя независимого или параллельного возбуждения определяется схемой электропривода. Свойства (характеристики) этих двигателей одинаковы [3].
В двигателях параллельного возбуждения токи обмотки возбуждения (индуктора) и якоря не зависят друг от друга, а полный ток двигателя равен сумме тока обмотки возбуждения и тока якоря. Во время нормальной работы, при увеличении напряжения питания увеличивается полный ток двигателя, что приводит к увеличению полей статора и ротора. С увеличением полного тока двигателя скорость так же увеличивается, а момент уменьшается. При нагружении двигателя ток якоря увеличивается, в результате чего увеличивается поле якоря. При увеличении тока якоря, ток индуктора (обмотки возбуждения) уменьшается, в результате чего уменьшается поле индуктора, что приводит к уменьшению скорости двигателя, и увеличению момента.
-
Преимущества:
- практически постоянный момент на низких оборотах
- хорошие регулировочные свойства
- отсутствие потерь магнетизма со временем (так как нет постоянных магнитов)
-
Недостатки:
- дороже КДПТ ПМ
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный электродвигатель параллельного возбуждения имеет механическую характеристику с уменьшающимся моментом на высоких оборотах и высоким, но более постоянным моментом на низких оборотах. Ток в обмотке индуктора и якоря не зависит друг от друга, таким образом, общий ток электродвигателя равен сумме токов индуктора и якоря. Как результат данный тип двигателей имеет отличную характеристику управления скоростью. Коллекторный двигатель постоянного тока с параллельной обмоткой возбуждения обычно используется в приложениях, которые требуют мощность больше 3 кВт, в частности в автомобильных приложениях и промышленности. В сравнении с КДПТ ПМ, двигатель параллельного возбуждения не теряет магнитные свойства со временем и является более надежным. Недостатками двигателя параллельного возбуждения являются более высокая себестоимость и возможность выхода двигателя из под контроля, в случае если ток индуктора снизится до нуля, что в свою очередь может привести к поломке двигателя [5].
Двигатель последовательного возбуждения
В электродвигателях последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря, при этом ток возбуждения равен току якоря (Iв = Iа), что придает двигателям особые свойства. При небольших нагрузках, когда ток якоря меньше номинального тока (Iа < Iном) и магнитная система двигателя не насыщена (Ф
Iа), электромагнитный момент пропорционален квадрату тока в обмотке якоря:
 ,
,
- где M – момент электродвигателя, Н∙м,
- сМ – постоянный коэффициент, определяемый конструктивными параметрами двигателя,
- Ф – основной магнитный поток, Вб,
- Ia – ток якоря, А.
С ростом нагрузки магнитная система двигателя насыщается и пропорциональность между током Iа и магнитным потоком Ф нарушается. При значительном насыщении магнитный поток Ф с ростом Iа практически не увеличивается. График зависимости M=f(Ia) в начальной части (когда магнитная система не насыщена) имеет форму параболы, затем при насыщении отклоняется от параболы и в области больших нагрузок переходит в прямую линию [3].


Способность двигателей последовательного возбуждения развивать большой электромагнитный момент обеспечивает им хорошие пусковые свойства.
-
Преимущества:
- высокий момент на низких оборотах
- отсутствие потерь магнетизма со временем
-
Недостатки:
- низкий момент на высоких оборотах
- дороже КДПТ ПМ
- плохая управляемость скоростью из-за последовательного соединения обмоток якоря и индуктора
- двигатель выходит из под контроля, если ток индуктора падает до нуля
Коллекторный двигатель последовательного возбуждения имеет высокий момент на низких оборотах и развивает высокую скорость при отсутствии нагрузки. Данный электромотор идеально подходит для устройств, которым требуется развивать высокий момент (краны и лебедки), так как ток и статора и ротора увеличивается под нагрузкой. В отличии от КДПТ ПМ и двигателей параллельного возбуждения двигатель последовательного возбуждения не имеет точной характеристики контроля скорости, а в случае короткого замыкания обмотки возбуждения он может стать не управляемым.
Двигатель смешанного возбуждения
Двигатель смешанного возбуждения имеет две обмотки возбуждения, одна из них включена параллельно обмотке якоря, а вторая последовательно. Соотношение между намагничивающими силами обмоток может быть различным, но обычно одна из обмоток создает большую намагничивающую силу и эта обмотка называется основной, вторая обмотка называется вспомогательной. Обмотки возбуждения могут быть включены согласовано и встречно, и соответственно магнитный поток создается суммой или разностью намагничивающих сил обмоток. Если обмотки включены согласно, то характеристики скорости такого двигателя располагаются между характеристиками скорости двигателей параллельного и последовательного возбуждения. Встречное включение обмоток применяется, когда необходимо получить неизменную скорость вращения или увеличение скорости вращения с увеличением нагрузки. Таким образом, рабочие характеристики двигателя смешанного возбуждения приближаются к характеристикам двигателя параллельного или последовательного возбуждения, смотря по тому, какая из обмоток возбуждения играет главную роль [4].
-
Преимущества:
- хорошие регулировочные свойства
- высокий момент на низких оборотах
- менее вероятен выход из под контроля
- отсутствие потерь магнетизма со временем
-
Недостатки:
- дороже других коллекторных двигателей
Двигатель смешанного возбуждения имеет эксплуатационные характеристики двигателей с параллельным и последовательным возбуждением. Он имеет высокий момент на низких оборотах, так же как двигатель последовательного возбуждения и хороший контроль скорости, как двигатель параллельного возбуждения. Двигатель смешанного возбуждения идеально подходит для устройств автомобилей и промышленности (таких как генераторы). Выход двигателя смешанного возбуждения из под контроля менее вероятен, так как для этого ток параллельной обмотки возбуждения должен уменьшиться до нуля, а последовательная обмотка возбуждения должна быть закорочена.
Характеристики коллекторного электродвигателя постоянного тока
Эксплуатационные свойства двигателей постоянного тока определяются их рабочими, электромеханическими и механическими характеристиками, а также регулировочными свойствами.

Основные параметры электродвигателя постоянного тока
Постоянная момента
Для коллекторного электродвигателя постоянного тока постоянная момента определяется по формуле:
 ,
,
- где Z — суммарное число проводников,
- Ф – магнитный поток, Вб [1]
Машины постоянного тока.
Устройство, назначение отдельных частей машины (главные полюсы – создание основного магнитного потока; якорь – индуктируется ЭДС; щёточно-коллекторный аппарат – механический выпрямитель в режиме генератора, перераспределение тока по обмотке якорь-двигатель). Принцип работы в режиме генератора (якорь вращается в неподвижном поле полюсов статора; в проводниках обмотки якоря индуктируется переменная ЭДС  , однако напряжение на зажимах машины сохраняет постоянное направление вследствие выпрямления его щёточно-коллекторным устройством; если якорь замкнуть на нагрузку, по нагрузке потечёт постоянный ток) и в режиме двигателя (постоянное напряжение подаётся на обмотки якоря и возбуждения; создаётся поле главных полюсов, и по якорю пойдёт ток; при взаимодействии тока якоря и магнитного поля возникает электромагнитный момент, который начинает вращать якорь, совершая механическую работу).
, однако напряжение на зажимах машины сохраняет постоянное направление вследствие выпрямления его щёточно-коллекторным устройством; если якорь замкнуть на нагрузку, по нагрузке потечёт постоянный ток) и в режиме двигателя (постоянное напряжение подаётся на обмотки якоря и возбуждения; создаётся поле главных полюсов, и по якорю пойдёт ток; при взаимодействии тока якоря и магнитного поля возникает электромагнитный момент, который начинает вращать якорь, совершая механическую работу).
Связь между ЭДС и напряжением в генераторном  и двигательном режимах
и двигательном режимах  . Обратимость машин постоянного тока.
. Обратимость машин постоянного тока.
 , В,
, В,
где Ф, Вб – магнитный поток одного полюса.
 ,
,
где р – число пар полюсов,
а — число пар параллельных ветвей,
N – число проводников якоря.
Генератор – ЭДС, двигатель – противоЭДС.
При n = const и  поток полюса и соответствующая ему ЭДС зависят только от тока возбуждения – характеристика Х.Х.
поток полюса и соответствующая ему ЭДС зависят только от тока возбуждения – характеристика Х.Х.
Вращающий (двигатель), тормозной (генератор) момент
 , Н·м,
, Н·м,
 ,
,  ,
,  .
.
Электромагнитный момент машины постоянного тока пропорционален току якоря и результирующему потоку каждого полюса.
Уравнение баланса мощностей цепи якоря генератора:
 .
.
Правая часть уравнения выражает мощность нагрузки и электрические потери мощности в обмотке якоря. Их сумма равна  — мощности, получаемой от первичного двигателя при преобразовании его механической энергии в электрическую.
— мощности, получаемой от первичного двигателя при преобразовании его механической энергии в электрическую.
Величина  — электромагнитная мощность машин, характеризует скорость процесса преобразования энергии.
— электромагнитная мощность машин, характеризует скорость процесса преобразования энергии.
Для электродвигателя баланс мощностей цепи якоря:
 .
.
Это уравнение означает, что мощность  поступления энергии в якорь электродвигателя от внешнего источника равна электромагнитной мощности и мощности потерь в обмотке якоря. Электромагнитная мощность равна механической мощности вращения якоря
поступления энергии в якорь электродвигателя от внешнего источника равна электромагнитной мощности и мощности потерь в обмотке якоря. Электромагнитная мощность равна механической мощности вращения якоря  .
.
Работа машины постоянного тока сопровождается потерями энергии и нагревом её частей:
 — электрические потери во внутренней цепи якоря от тока нагрузки;
— электрические потери во внутренней цепи якоря от тока нагрузки;
 — потери от трения в подшипниках и о воздух, обычно составляющие 1 – 2%;
— потери от трения в подшипниках и о воздух, обычно составляющие 1 – 2%;
 — потери в магнитной цепи (якоре) от гистерезиса и вихревых токов, составляющие 1 – 3%;
— потери в магнитной цепи (якоре) от гистерезиса и вихревых токов, составляющие 1 – 3%;
 — потери на возбуждение или самовозбуждение, т.е. электрические потери в цепи обмотки возбуждения.
— потери на возбуждение или самовозбуждение, т.е. электрические потери в цепи обмотки возбуждения.
Способы возбуждения машин постоянного тока.



Независимое Последовательное (сериесные)
 .
.


Параллельное (шунтовые) Смешанное
генераторный:  ;
;
двигательный:  .
.
Генераторы с самовозбуждением.
Условия самовозбуждения (наличие остаточного потока, совпадение по направлению  и Ф, сопротивление цепи возбуждения должно быть меньше критического).
и Ф, сопротивление цепи возбуждения должно быть меньше критического).
Двигатели  при включении якоря на номинальное напряжение сети (
при включении якоря на номинальное напряжение сети (  = 0) пусковой ток будет недопустимо велик. Поэтому в цепь якоря при пуске двигателя вводят добавочное сопротивление в виде специального пускового реостата. Сопротивление выбирается таким, чтобы пусковой ток не превышал (1,5÷2)
= 0) пусковой ток будет недопустимо велик. Поэтому в цепь якоря при пуске двигателя вводят добавочное сопротивление в виде специального пускового реостата. Сопротивление выбирается таким, чтобы пусковой ток не превышал (1,5÷2)  .
.
 .
.
Уравнение механической характеристики:  .
.
 ,
,
 .
.
Из механической характеристики – способы регулирования скорости двигателя:
1) изменение напряжения на якоре U,
2) изменение потока возбуждения Ф,
3) изменение добавочного сопротивления в цепи якоря.
Задача 1.
Генератор независимого возбуждения имеет следующие номинальные данные:  ,
,  ,
,  . Сопротивление обмотки якоря в нагретом состоянии
. Сопротивление обмотки якоря в нагретом состоянии  Ом.
Ом.
Построить внешнюю характеристику генератора и определить его электромагнитную мощность  , а также изменение напряжения на зажимах при переходе от номинального режима к режиму Х.Х. Реакцией якоря и падением напряжения в контактах щёток пренебречь.
, а также изменение напряжения на зажимах при переходе от номинального режима к режиму Х.Х. Реакцией якоря и падением напряжения в контактах щёток пренебречь.
Внешняя характеристика генератора строится по уравнению:
 , это
, это  .
.
В генераторе независимого возбуждения  . Для построения внешней характеристики – прямая линия – достаточно определить величину напряжения при двух фиксированных режимах работы. Такими режимами работами будем считать номинальный режим и режим Х.Х.
. Для построения внешней характеристики – прямая линия – достаточно определить величину напряжения при двух фиксированных режимах работы. Такими режимами работами будем считать номинальный режим и режим Х.Х.
Если пренебречь реакцией якоря, то можно считать
 .
.
 .
.
Координаты точек характеристики  .
.
 ,
,  — номинальный режим.
— номинальный режим.
 ,
,  — холостой ход.
— холостой ход.
 кВт.
кВт.
Изменение напряжения на зажимах генератора:  .
.
1. Как определяется величина тока генератора независимого возбуждения при режиме К.З.? Опасен ли этот режим для машин?
Величина магнитного потока практически не зависит от нагрузки, следовательно практически постоянной будет и ЭДС генератора. При К.З. U=0, следовательно  .
.
 =13480 А.
=13480 А.
Ток возрастает в 17 раз, что чрезвычайно опасно.
2. Какие причины вызывают уменьшение напряжения генератора при росте нагрузки?

а) при росте нагрузки увеличивается падение напряжения в цепи якоря,
б) хоть и незначительно, изменяется (уменьшается) ЭДС, вследствие реакции якоря.
Задача 2.
На сколько процентов нужно уменьшить магнитный поток генератора постоянного тока с независимым возбуждением и напряжением на выводах  , если нагрузка уменьшилась с 3 до 1,5 кВт, чтобы при этом напряжение на выводах осталось постоянным? Падение напряжения на щётках
, если нагрузка уменьшилась с 3 до 1,5 кВт, чтобы при этом напряжение на выводах осталось постоянным? Падение напряжения на щётках  . Всеми потерями можно пренебречь, учесть только влияние реакции якоря и потери в якорной цепи. Сопротивление обмотки якоря
. Всеми потерями можно пренебречь, учесть только влияние реакции якоря и потери в якорной цепи. Сопротивление обмотки якоря  Ом.
Ом.
1) Уравнение электрического равновесия для двух нагрузок:
 ,
,  ,
,
где  ,
,  (подразумевается, что скорость вращения при изменении нагрузки не изменяется).
(подразумевается, что скорость вращения при изменении нагрузки не изменяется).
2) В генераторах с независимым возбуждением  , поэтому
, поэтому  . По заданным мощностям нагрузок можно определить токи якоря для двух режимов работы:
. По заданным мощностям нагрузок можно определить токи якоря для двух режимов работы:
 А,
А,  А.
А.
3) Так как ЭДС пропорциональны магнитным потокам, можно записать  .
.
Относительное изменение магнитного потока:



 .
.
Итак, чтобы напряжение осталось неизменным при уменьшении нагрузки, поток требуется уменьшить на 5,5%.
Задача 3.
Генератор постоянного тока с независимым возбуждением, число полюсов 2р=4, номинальная мощность  кВт. Индукция воздушного зазора при холостом ходе изменяется вдоль зазора так, как это показано на рисунке. Максимальная индукция воздушного зазора
кВт. Индукция воздушного зазора при холостом ходе изменяется вдоль зазора так, как это показано на рисунке. Максимальная индукция воздушного зазора  Тл, число проводников N=430, обмотка волнового типа, сопротивление якоря
Тл, число проводников N=430, обмотка волнового типа, сопротивление якоря  Ом.
Ом.

Основные размеры машины: диаметр якоря  м, расчётная длина
м, расчётная длина  м, n=1500 об/мин, падение напряжения на щётках
м, n=1500 об/мин, падение напряжения на щётках  В.
В.
1) Среднюю индукцию воздушного зазора Вб;
2) Полюсное деление  и окружную скорость якоря
и окружную скорость якоря  ;
;
3) число проводников, включённых последовательно в одной ветви обмотки;
4) индуктированную ЭДС;
5) напряжение на выводах генератора и номинальный ток якоря  .
.
1) Вб – среднее значение индукции на протяжении полюсного деления  .
.
 ,
,
 Тл.
Тл.
2) Полюсное деление  м.
м.
Окружная скорость якоря:

 м/мин
м/мин  м/с.
м/с.
3) Число последовательно включённых проводников одной параллельной ветви  ,
,
где 2а=2 – число параллельных ветвей при простой волновой обмотке не зависит от числа полюсов и всегда равно 2.
4) ЭДС, индуктированная в якоре  ,
,
где Ф – полезный магнитный поток.
 Вб.
Вб.
 В.
В.
5) Уравнение электрического равновесия якорной цепи в номинальном режиме:
 ,
,  ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
 В,
В,  В.
В.
Значение  можно отбросить, так как оно имеет порядок остаточного напряжения. Следовательно,
можно отбросить, так как оно имеет порядок остаточного напряжения. Следовательно,  В.
В.
 А.
А.
Дополнительный вопрос.
Машина постоянного тока, рассмотренная в задаче, подключается к сети при напряжении на выводах U=220 В. Ток возбуждения неизменён. Машину в качестве двигателя нагружают до номинальной нагрузки. При этом ток якоря  А. Определить частоту вращения двигателя и полезный момент М.
А. Определить частоту вращения двигателя и полезный момент М.
Уравнение электрического равновесия в режиме двигателя:
 ,
,
— ток как ток возбуждения не изменился, поток также остаётся неизменным.
 ,
,
 об/мин.
об/мин.
Развиваемый при этом момент  Н·м.
Н·м.
Задача 4.
Четырёхполюсный генератор постоянного тока вращается с частотой n =1500 об/мин. Диаметр якоря  м, расчётная длина пакета якоря
м, расчётная длина пакета якоря  м, длина полюсной дуги в = 0,162 м. Данные обмотки: число пазов z = 43, число катушечных сторон в одном слое паза u = 3, число витков в секции w = 1. Обмотка волновая, лобовые части обмотки не перекрещиваются.
м, длина полюсной дуги в = 0,162 м. Данные обмотки: число пазов z = 43, число катушечных сторон в одном слое паза u = 3, число витков в секции w = 1. Обмотка волновая, лобовые части обмотки не перекрещиваются.
1) Построить обмотку так, чтобы она не была ступенчатой;
2) Определить полезный поток машины, если ЭДС Е = 414 В;
3) Определить значение индукции воздушного зазора: среднюю Вб и максимальную Вбmax.
1) Если обмотка не ступенчатая, катушечные стороны располагаются совместно в одном пазу. При этом – пазовый шаг (выражается в количестве зубцовых делений) должен выражаться целым числом.
 , т.е. необходимо произвести удлинение на
, т.е. необходимо произвести удлинение на  ,
,
 — первый частичный шаг, выражен в числе катушечных сторон.
— первый частичный шаг, выражен в числе катушечных сторон.
Число коллекторных пластин k = u·z = 3·43 =129.
Коллекторный шаг  .
.
Второй частичный шаг  .
.
Число действующих проводников по периметру якоря: N = 2·u·z·w = 2·3·43·1 = 288.
Схема соединения на рисунке 6.

2) Полезный магнитный поток машины определяется из соотношения .
 Вб.
Вб.
Средняя индукция воздушного зазора:
 Тл,
Тл,
 м, полюсное деление машины.
м, полюсное деление машины.
Максимальное значение индукции:
 Тл.
Тл.
Задача 5.
Схема замещения генератора постоянного тока приведена на рис.7.

Uн = 230 В, Iя = 29,6 А, Rя = 0,7 Ом,  Ом.
Ом.
Второй закон Кирхгофа – уравнение электрического состояния генератора  В.
В.
Номинальный ток возбуждения (закон Ома):
 А.
А.
Мощность на нагрузке:
 Вт.
Вт.
Задача 6.
Условие то же. Построить внешнюю характеристику.
Определить U и Р при I = 24 А.
 ,
,
,
P = U·I = 232,5·24 = 5580 Вт.

Задача 7.
Характеристика Х.Х. генератора независимого возбуждения задана:
Номинальные данные генератора: Рн = 178 кВт, Uн = 230 В, Iян = 775 А, номинальное напряжение на зажимах обмотки возбуждения Uвн = 100 В.
Определить собственное сопротивление обмотки возбуждения Rв, а также сопротивление регулировочного реостата Rp, включаемого в цепь обмотки возбуждения для того, чтобы при неизменном сопротивлении нагрузки R = 0,297 Ом напряжение на её зажимах было равно  .
.
При номинальном режиме  , отсюда
, отсюда  В.
В.

Согласно характеристике Х.Х. этому значению ЭДС соответствует номинальное значение тока возбуждения Iвн = 4,5 А.
Номинальный режим создаётся при полностью выведенном регулированном реостате. Поэтому собственное сопротивление обмотки возбуждения:  Ом.
Ом.
При снижении напряжения до величины  В уменьшается соответственно и ток нагрузки, равный току якоря:
В уменьшается соответственно и ток нагрузки, равный току якоря:  А.
А.
ЭДС обмотки якоря в этом случае определится:
 в.
в.
Этому значению ЭДС соответствует на характеристике Х.Х. Iв = 1,55 А. При этом сопротивление цепи возбуждения —  .
.
 Ом.
Ом.
Сопротивление регулировочного реостата:  Ом.
Ом.
Задача 8.
Генератор постоянного тока с параллельным возбуждением характеризуется следующими номинальными величинами: напряжение Uн, мощность Рн. Мощность потерь в номинальном режиме в % от Рн, в цепи возбуждения Рв.
1) Номинальный ток нагрузки генератора Iн;
2) Номинальный ток возбуждения Iв;
3) Номинальный ток якоря Iя;
4) Сопротивление цепи якоря Rя;
5) ЭДС якоря при токе, равном номинальному;
6) Сопротивление цепи возбуждения при токе возбуждения, равном номинальному;
7) сопротивление обмотки возбуждения, принимая, что при холостом ходе генератора и полностью выведенном реостате в цепи возбуждения ток в этой цепи составляет 1,5Iвн.
При решении воспользоваться зависимостью Е=f(Iв).
| Варианты | Uн, В | Рн, кВт | Ря, % | Рв, % |
| 7,5 | ||||
| 7,5 | ||||
| 6,5 | ||||
| 5,5 | ||||
| 1,5 | ||||
| 4,5 | 1,5 |
Задача 9.
Двигатель постоянного тока параллельного возбуждения включён в сеть U = 110 В, сопротивление обмотки якоря двигателя Rя = 0,07 Ом. При половинной нагрузке частота вращения двигателя n = 1400 об/мин, якорный ток Iя = 74 А. Определить частоту вращения двигателя, если в цепь якоря включено внешнее добавочное сопротивление Rдоб = 0,3 Ом, а нагрузочный момент увеличился вдвое. При этом пренебречь реакцией якоря, а падение напряжения на щётках считать равным  В.
В.
Момент двигателя постоянного тока  . Сравним два режима работы. Так как реакцией якоря можно пренебречь, в обоих случаях поток остаётся неизменным, а поэтому:
. Сравним два режима работы. Так как реакцией якоря можно пренебречь, в обоих случаях поток остаётся неизменным, а поэтому:  ,
,  .
.
 А.
А.
Уравнение электрического равновесия:
, отсюда для первого случая:

 В,
В,
 .
.
Для второго случая:


 ,
,  об/мин.
об/мин.
Задача 10.
Для тяговых двигателя последовательного возбуждения одинаковой конструкции нагружаются поочерёдно. Напряжение сети U = 500 В. В начале к сети подключается один из этих двигателей и нагружается до тех пор, пока его частота вращения не достигнет n1 = 700 об/мин. Потребляемый из сети ток этого двигателя равен Iя1 = 50 А. Затем то же самое проделывают со вторым двигателем. При той же частоте вращения потребляемый из сети ток Iя2 = 55 А. Внутренне сопротивление цепи якоря каждого двигателя Rя = 0,3 Ом. Валы двух двигателей соединены муфтой. Их электрические цепи соединены последовательно и подключены к сети U = 500 В. Затем оба двигателя нагружаются до тех пор, пока потребляемый ток достигнет значения  = 50 А.
= 50 А.
Какова частота вращения машин и в каком соотношении находятся их потребляемые мощности? Предположим, что магнитная цепь машин не насыщена и при малых изменениях магнитный поток изменяется пропорционально току.

Определим индуктированные ЭДС двигателей при их раздельном испытании.
 В,
В,
 ,
,
 .
.
 В,
В,
 .
.
При последовательном включении двигателей:

По условию задачи, магнитный поток изменяется пропорционально току. Так как  , поток первого двигателя не изменяется
, поток первого двигателя не изменяется  .
.
Поток второго двигателя определён из соотношения:
 ,
,  .
.
 ,
,
 об/мин.
об/мин.
Определяем напряжение на выводах каждого двигателя:
 В,
В,
 В.
В.
Отношение потребляемых мощностей:
 .
.
Задача 11.
Двигатель постоянного тока параллельного возбуждения имеет следующие номинальные данные: Рн = 12 кВт, Uн = 220 В, nн = 685 об/мин, Iн = 64 А, Iвн = 1,75 А. Сопротивление обмотки якоря в нагретом состоянии Rя = 0,281 Ом.
Определить скорость вращения якоря двигателя при Х.Х. и тормозном моменте на валу, равном 0,6Мн. Поострить естественную механическую характеристику. Размагничивающим действием реакции якоря пренебречь.
Скорость вращения якоря в режиме идеального Х.Х., когда Uн = Ео,  , скорость вращения в режиме номинальной нагрузки
, скорость вращения в режиме номинальной нагрузки  . Из этих двух соотношений:
. Из этих двух соотношений:


 об/мин.
об/мин.

Соотношение токов – по схеме по ходу решения.
Условие динамического равновесия при работе двигателя:  . Поэтому при изменении тормозного момента изменяется и
. Поэтому при изменении тормозного момента изменяется и  .
.
 .
.
Вращающий момент пропорционален току якоря. При постоянном магнитном потоке (реакцией якоря пренебрегаем) вращающий момент изменяется вследствие соответствующего изменения тока якоря. Следовательно, при
 ,
,
 А,
А,
 А.
А.
Записываем выражения, определяющие скорости при  и
и  .
.
 ,
,  .
.
Взяв отношение этих скоростей, получим:
 = 708 об/мин.
= 708 об/мин.
Механическая характеристика n = f(М). Для рассматриваемого двигателя – это прямая линия. Строим по двум точкам: М = 0, n = no = 740 об/мин. М = 0,6Мвр.ном,  об/мин.
об/мин.

Естественная механическая характеристика – в цепи якоря отсутствует добавочное сопротивление.
1. Составить уравнение баланса мощностей для двигателя в номинальном режиме.
 ;
;
 В;
В;
220·62,25 = 202,5·62,25 + 62,25·0,281;
13695 = 12605,6 + 1088,9;
2. Какое дополнительное сопротивление R следует включить в цепь якоря двигателя, чтобы при М = 0,6Мн скорость его вращения снизилась до 630 об/мин?
Соотношение аналогично тому, при котором определилось  : дополнительно последовательно с обмоткой якоря включается сопротивление R
: дополнительно последовательно с обмоткой якоря включается сопротивление R
 , отсюда определяем R
, отсюда определяем R
 = 0,623 Ом.
= 0,623 Ом.
При введении в цепь якоря R получим искусственную механическую характеристику (график).
3. Определить мощность потерь в регулировочном сопротивлении
 Вт.
Вт.
Задача 12.
Двигатель постоянного тока с независимым возбуждением, компенсированный (магнитный поток постоянен), номинальная мощность Рном = 22 кВт, число полюсов 2р = 4, напряжение на выводах U = 220 В, номинальная частота вращения n = 1500 об/мин, КПД  . На якоре N = 248 проводников, обмотка – волновая, внутреннее сопротивление обмотки якоря Rя = 0,1 Ом. Напряжение возбуждения Uв = 220 В, сопротивление обмотки возбуждения Rв = 82,5 Ом. Пренебречь падением напряжения на щётках, потерями на трение и вентиляцию, а также реакцией якоря.
. На якоре N = 248 проводников, обмотка – волновая, внутреннее сопротивление обмотки якоря Rя = 0,1 Ом. Напряжение возбуждения Uв = 220 В, сопротивление обмотки возбуждения Rв = 82,5 Ом. Пренебречь падением напряжения на щётках, потерями на трение и вентиляцию, а также реакцией якоря.
1) Рассчитать естественную механическую характеристику, считая сопротивление якорной цепи Rя, рассчитать искусственную механическую характеристику при добавочном сопротивлении в цепи якоря Rдоб = 2 Ом;
2) Определить добавочное сопротивление, включаемое последовательно с якорной цепью, для номинального момента, чтобы получить n = 900 об/мин;
3) Определить, насколько нужно уменьшить напряжение на выводах, если необходимо установить n = 900 об/мин при номинальном моменте;
4) Определить, насколько нужно увеличить сопротивление цепи возбуждения, чтобы частота вращения стала равной = 1600 об/мин при номинальном моменте. Характеристика холостого хода машины приведена в виде таблицы
1) Механическая характеристика двигателя – это зависимость частоты вращения от момента n = f(M).
Если считать поток постоянным и пренебречь падением напряжения на щётках, то
 .
.
Получим уравнение прямой, наклон которой к горизонтальной оси определяется величиной m. Теоретически при идеальном холостом ходе Iя = 0 и  . В действительности из-за потерь в машине ток в якоре при холостом ходе не может быть равным нулю.
. В действительности из-за потерь в машине ток в якоре при холостом ходе не может быть равным нулю.
Итак, . Величину СЕ·Ф определим из уравнения ЭДС для номинального режима.
 .
.
 об/мин.
об/мин.
 А.
А.
nх = 1583, М = 0 – точка Х.Х. естественной механической характеристики (рис. 8).
Вторая точка – определяется номинальным режимом
Мном =  .
.
На графике – естественная механическая характеристика – 1.
Для искусственной механической характеристики первая точка – точка холостого хода.
Вторую точку можно определить как точку пуска: n = 0, М = Мпуск.
 А.
А.
Момент в номинальной точке и пусковой момент:  ,
,  . Из двух уравнений находим Мпуск.
. Из двух уравнений находим Мпуск.


На графике – искусственная механическая характеристика 2.
2) Введение добавочного сопротивления в цепь якоря – один из способов регулирования частоты вращения двигателя постоянного тока (уменьшение).
Так регулирование происходит при постоянном моменте, ток якоря в установившемся режиме остаётся неизменным. Если М = Мном, то и Iя = Iя.ном, а поэтому  , делаем числовые подстановки и определяем величину добавочного сопротивления:
, делаем числовые подстановки и определяем величину добавочного сопротивления:
 .
.
 .
.
125,064 = 220 – 11,56 — Rдоб·115,6,
Механическая характеристика на графике – 3.
Изменение оборотов  ,
,
 .
.
3) Изменение величины питающего напряжения – ещё один способ регулирования частоты вращения двигателя (уменьшение).
Механические характеристики при сохранении неизменным момента в случае уменьшения напряжения сдвигаются параллельно естественной характеристике. При номинальном моменте разность частот вращения  об/мин. Из параллельности прямых следует, что новая частота вращения холостого хода при пониженном напряжении
об/мин. Из параллельности прямых следует, что новая частота вращения холостого хода при пониженном напряжении  об/мин.
об/мин.
Для идеального холостого хода:
 ,
,  , отсюда
, отсюда

 .
.
Итак, напряжение питания надо уменьшить на 83,4 В. Механическая характеристика на графике – 4.
4) Изменение сопротивления цепи возбуждения – ещё один способ изменения скорости вращения двигателя (увеличение).
Уравнение механической характеристики:
 , ( ).
, ( ).
Если увеличивается сопротивление цепи возбуждения, ток возбуждения уменьшается, уменьшается и основной поток. Механическая характеристика становится более крутой, частота вращения в режиме холостого хода растёт.
Определим постоянные машины:
 ,
,  .
.
При заданной частоте вращения определим величину магнитного потока:
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,  .
.
Выбираем первое решение, так как второе слишком мало для машины с  Истинный магнитный поток машины
Истинный магнитный поток машины 
Частота вращения при холостом ходе:

 .
.
На графике – механическая характеристика – 5.
При магнитном потоке  индуцированная ЭДС:
индуцированная ЭДС:
 .
.
По характеристике холостого хода определяется ток возбуждения:  .
.
Требуемое сопротивление цепи возбуждения:
 .
.
Отсюда 
Задача 14.
Электродвигатель постоянного тока с параллельным возбуждением выполнен на номинальное напряжение 220 В. Данные номинального режима электродвигателя: мощность  , скорость вращения якоря
, скорость вращения якоря  , КПД
, КПД  . Ток в цепи возбуждения составляет
. Ток в цепи возбуждения составляет  % от номинального тока электродвигателя. Мощность потерь в цепи якоря при номинальной нагрузке составляет 5,0% от суммарной мощности потерь в электродвигателе.
% от номинального тока электродвигателя. Мощность потерь в цепи якоря при номинальной нагрузке составляет 5,0% от суммарной мощности потерь в электродвигателе.
1) номинальный момент на валу электродвигателя;
2) ток , потребляемый электродвигателем из сети при номинальной нагрузке;
3) токи в цепи возбуждения и в цепи якоря при номинальной нагрузке;
http://engineering-solutions.ru/motorcontrol/brushdcmotor/
http://poisk-ru.ru/s10787t4.html
Определение сопротивления якорной цепи двигателя. Расчет механических характеристик при номинальном напряжении на якоре
Страницы работы
Фрагмент текста работы
Министерство сельского хозяйства Российской Федерации
Красноярский Государственный Аграрный Университет
Кафедра электроснабжения
Контрольная работа № 4
Машины постоянного тока
Вариант № 53
Выполнил: ст. гр. ЭТ-33
Гольцман Ю.В.
Проверил: преподаватель
Мещеряков
А.В.
Красноярск 2004
Контрольная работа № 4
Машины постоянного тока
Вариант № 53
1.
Начертить электрическую схему
соединения обмоток двигателя постоянного тока с параллельным возбуждением.
2.
Приближенно определить
сопротивление якорной цепи двигателя.
3.
Рассчитать рабочие характеристики
по техническим данным двигателя. Начертить графики рабочих характеристик.
4.
По заданному значению пускового
тока или момента определить сопротивление пускового реостата.
5.
Рассчитать естественную
механическую характеристику ![]() и искусственные
и искусственные
(реостатные) механические характеристики при добавочных сопротивлениях,
последовательно включенных в цепь якоря. Начертить графики характеристик.
6.
Рассчитать механические
характеристики при номинальном напряжении на якоре и ослаблении магнитного
потока на 20% и 40%. Начертить графики характеристик.
Технические данные двигателя постоянного тока
|
Номинальные |
Число полюсов
|
Сопротивления |
||||
|
напряжение
|
мощность
|
частота вращения
|
КПД
|
якорной цепи
|
обмотки возбуждения
|
|
|
220 |
22,0 |
1000 |
0,82 |
4 |
0,181 |
77,6 |
Приближенное определение
сопротивления якорной цепи двигателя
Номинальная мощность, потребляемая двигателем из
сети
где
![]() -номинальная механическая мощность на валу
-номинальная механическая мощность на валу
двигателя, кВт
![]() -номинальный КПД, о.е.
-номинальный КПД, о.е.
Суммарные потери
мощности в двигателе при номинальной нагрузке
![]()
Номинальный
ток двигателя

где
![]() -номинальное напряжение, В
-номинальное напряжение, В
Номинальный
ток возбуждения
где
![]() -сопротивление обмотки возбуждения, Ом
-сопротивление обмотки возбуждения, Ом
Номинальный
ток якоря
![]()
Приближенно
считаем, что электрические потери мощности ![]() в
в
якорной цепи двигателя с параллельным возбуждением составляют половину
суммарных потерь мощности в двигателе
![]()
Сопротивление
якорной цепи двигателя

Рабочие характеристики двигателя ![]() , при
, при ![]()
Номинальная угловая
механическая скорость вращения якоря

где ![]() —
—
номинальная частота вращения якоря, об/мин
Произведение конструктивной постоянной машины Се
на номинальный магнитный поток Фн

Угловая механическая скорость вращения якоря при «идеальном»
холостом ходе
Номинальный,
полезный момент на валу
Электрические потери мощности в якорной цепи
двигателя при номинальной нагрузке
![]()
Потери мощности при холостом ходе двигателя
![]()
Потери мощности в обмотке возбуждения при
номинальном токе возбуждения
![]()
Момент холостого
хода двигателя

Электромагнитный
момент
![]()
Ток якоря двигателя
где ![]() при расчётах в системе СИ.
при расчётах в системе СИ.
Угловая
механическая скорость вращения якоря

Частота вращения
якоря

Полезная механическая мощность на валу
![]()
Электрические
потери мощности в якорной цепи
![]()
![]()
Электрическая
мощность, потребляемая двигателем из сети
![]()
Ток, потребляемый двигателем из
сети

КПД двигателя
Результаты расчёта рабочих характеристик
|
|
0 |
0,25 |
0,5 |
0,75 |
1,0 |
1,25 |
|
|
0 |
52,55 |
105,09 |
157,6 |
210,19 |
262,74 |
|
|
14 |
66,66 |
119 |
171,75 |
224 |
276,85 |
|
|
7,44 |
35,16 |
62,88 |
90,59 |
118 |
146 |
|
|
115,33 |
112,68 |
110,04 |
107,39 |
104,74 |
102,09 |
|
|
1101,86 |
1076,58 |
1051,29 |
1026,02 |
1000,74 |
975,46 |
|
|
0 |
5,92 |
11,56 |
16,93 |
22,02 |
26,83 |
|
|
0,01 |
0,224 |
0,716 |
1,485 |
2,533 |
3,859 |
|
|
2,27 |
8,41 |
14,54 |
20,68 |
26,81 |
32,95 |
|
|
10,32 |
34,21 |
66,09 |
93,98 |
121,87 |
149,75 |
|
|
0 |
0,704 |
0,795 |
0,819 |
0,821 |
0,814 |

График зависимостей I, M2 = f (P2)
График зависимости Р1 = f (Р2)
График зависимости h = f (P2
)
График зависимости n = f (P2)
Определение сопротивления пускового реостата
Сопротивление пускового реостата, если задан пусковой
ток якоря ![]()

Механические характеристики двигателя при различных
добавочных сопротивлениях в цепи якоря
Частота вращения «идеального» холостого хода двигателя

Угловая механическая скорость вращения при
номинальном моменте на валу

где ![]() -номинальный
-номинальный
электромагнитный момент двигателя (Нм) при 
Соответствующая
частота вращения якоря
|
|
|
|
|
|
|
104,74 |
70,86 |
36,976 |
|
|
1000,738 |
677,008 |
353,277 |
Механические характеристики при разных добавочных
сопротивлениях в цепи якоря двигателя: 1 – естественная (RЯД=0); 2,3 – искусственные реостатные при RЯД1= 3RЯ и RЯД2= 6RЯ.
Механические характеристики при ослаблении магнитного
потока двигателя.
При уменьшении магнитного
потока в двигателях параллельного возбуждения увеличивается механическая
угловая скорость вращения якоря при «идеальном» холостом ходе
![]()

где К – коэффициент, учитывающий отношение
магнитного потока после его уменьшения по отношению к номинальному, о.е.
Частота вращения якоря при «идеальном» холстом ходе
Соответствующую второй точке механической
характеристики угловую механическую скорость вращения якоря определим по
формуле механической характеристики при номинальном моменте на валу М2Н

где
![]() -номинальный электромагнитный момент
-номинальный электромагнитный момент
двигателя (Нм) при .
Частота вращения якоря

|
К=1 |
К=0,8 |
К=0,6 |
|
|
|
116 |
145,048 |
193,397 |
|
|
1108,6 |
1385,809 |
1847,746 |
|
|
104,7 |
127,4 |
162,024 |
|
|
1000,738 |
1217,2 |
1547,996 |
Механические характеристики при разных значениях
магнитного потока: 1 – естественная (Ф=ФН, к=1); 2,3 – искусственные
при ослабленном магнитном
Похожие материалы
- Асинхронные машины. Расчет трехфазных асинхронных двигателей
- Инструкция по эксплуатации выключателей ВМП(Э)-10
- Расчет параметров уточнённой Г–образной схемы замещения асинхронного двигателя. Расчет рабочих и пусковых характеристик