Сила упругости широко используется в технике. Эта сила возникает в упругих телах при их деформации. Деформация – это изменение формы тела, под действием приложенных сил.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.

Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина (L_{0}) пружины.

Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину (L), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
[ large L_{0} + Delta L = L ]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину (L_{0}).
[ large boxed{ Delta L = L — L_{0} }]
( L_{0} left(text{м} right) ) – начальная длина пружины;
( L left(text{м} right) ) – конечная длина растянутой пружины;
( Delta L left(text{м} right) ) – кусочек длины, на который растянули пружину;
Величину ( Delta L ) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
[ large boxed{ frac{Delta L }{ L_{0}} = frac{ L — L_{0}}{L_{0} } = varepsilon } ]
( varepsilon ) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.

Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал ( F_{text{упр}} ) силой упругости.
[ large boxed{ F_{text{упр}} = k cdot Delta L }]
Эту формулу назвали законом упругости Гука.
( F_{text{упр}} left( H right) ) – сила упругости;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.

Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
[ large F_{text{упр}} — m cdot g = 0 ]
Подставим в это уравнение выражение для силы упругости
[ large k cdot Delta L — m cdot g = 0 ]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины (Delta L ) пружины. Получим выражение для коэффициента жесткости:
[ large boxed{ k = frac{ m cdot g }{Delta L} }]
(g) – ускорение свободного падения, оно связано с силой тяжести.
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину (Delta L). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.

Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две параллельные пружины:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{параллел}} cdot Delta L cdot frac{1}{2}= k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{параллел}} cdot frac{1}{2}= k_{1} ]
Умножим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{параллел}} = 2k_{1} } ]
Коэффициент жесткости (k_{text{параллел}}) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину (Delta L). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину (Delta L).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений

Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом (mg).
Одна пружина:
[ large k_{1} cdot Delta L = m cdot g ]
Две последовательные пружины:
[ large k_{text{послед}} cdot Delta L cdot 2 = m cdot g ]
Так как правые части уравнений совпадают, левые части тоже будут равны:
[ large k_{text{послед}} cdot Delta L cdot 2 = k_{1} cdot Delta L ]
Обе части уравнения содержат величину (Delta L ). Разделим обе части уравнения на нее:
[ large k_{text{послед}} cdot 2 = k_{1} ]
Разделим обе части полученного уравнения на число 2:
[ large boxed{ k_{text{послед}} = frac{k_{1}}{2} } ]
Коэффициент жесткости (k_{text{послед}}) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину (Delta L ) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.

Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
[ large boxed{ E_{p} = frac{k}{2} cdot left( Delta L right)^{2} }]
( E_{p} left( text{Дж} right)) – потенциальная энергия сжатой или растянутой пружины;
( Delta L left(text{м} right) ) – удлинение пружины;
( displaystyle k left(frac{H}{text{м}} right) ) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Сила упругости, как мы знаем, возникает при деформации тел. По своему абсолютному значению она пропорциональна величине деформации (удлинению), а направлена в сторону, противоположную направлению смещения точек тела при деформации.

рис. 1
На рисунке 1, а показана пружина в ее естественном, недефор-мнрованном состоянии. Правый конец пружины закреплен, а к левому прикреплено тело. Если пружину сжать, сместив левый ее конец на расстояние $x_{1}$ (рис. 1, б), то возникнет сила упругости, действующая со стороны пружины на тело, равная:
$F_{1упр} = — kx_{1}$,
где $k$ — жесткость пружины.
При перемещении витков пружины сила упругости совершит работу. Какова величина этой работы?
Предположим, что левый конец пружины переместился из положения $A$ в положение $B$ (рис. 1, в). В этом положении деформа ция пружины равна уже не $x_{1}$, а $x_{2}$. Значит, конец пружины переместился на расстояние $x_{2} — x_{1}$. Чтобы вычислить работу, нужно это перемещение умножить на силу. Но сила упругости в отличие от силы тяжести вблизи поверхности Земли при движении тела изменяется от точки к точке. Если в начальной точке она была равна $- kx_{1}$, то в конечной точке (в точке $B$) она стала равной $-kx_{2}$.
Для того чтобы вычислить работу силы упругости, нужно взять среднее значение силы упругости и умножить его на перемещение $x_{2} — x_{1}$ (см. §75).
Сила упругости пропорциональна деформации пружины. Поэтому среднее значение силы упругости можно найти, используя метод, который был использован при нахождении среднего значения скорости при равноускоренном движении.
Для среднего значения скорости при равноускоренном движении мы получили формулу
$v_{ср} = frac{v_{1} + v_{0} }{2}$,
где $v_{0}$ — начальное и $v_{1}$ — конечное значение скорости. Подобно этому среднее формуле значение силы упругости можно определить по
$F_{упр.ср} = — k frac{x_{1} + x_{2} }{2}$.
На это-то значение силы упругости и нужно умножить перемещение $x_{2} — x_{1}$, чтобы получить работу этой силы:
$A = — k frac{x_{1} + x_{2} }{2} (x_{2} — x_{1})$.
Так как $(x_{1} + x_{2}) (x_{2} — x_{1}) = x_{2}^{2} — x_{1}^{2}$, то формула для работы принимает вид:
$A = frac{k}{2} (x_{1}^{2} — x_{2}^{2} )$.
Работа силы упругости равна половине произведения жесткости упругого тела на разность квадратов его начального и конечного удлинений.
Если конечное удлинение пружины равняется нулю ($x_{2} = 0$), т. е. пружина приходит в недеформированное состояние, то она совершает работу
$A = frac{kx^{2} }{2}$,
где $x$ — начальное удлинение пружины.
Интересно, что работа силы упругости имеет некоторое сходство с работой силы тяжести. Если сравнить выражения для работы этих двух сил:
$A = mg (h_{1} — h_{2})$
и $A = frac{k}{2} (x_{1}^{2} — x_{2}^{2} )$,
то можно заметить, что в обоих случаях работа зависит от начального и конечного положений тела. В первой формуле высота $h$ определяет положение тела, на которое действует сила тяжести (например, относительно поверхности Земли). Во второй формуле удлинение $x$ определяет положение одного конца пружины относительно другого ее конца.
Работа как силы упругости, так и силы тяжести зависит не от формы, или длины пути, а только от начального и конечного положений движущегося тела.
Задача. При столкновении вагонов их буфера (по два на каждом вагоне) сжались на 5 см. Какая работа была при этом совершена силами упругости пружин, если известно, что при сжатии буфера на 1 см возникает сила упругости в 10 000 Н?
Решение. Вычислим сначала работу одной из четырех пружин. Для этого воспользуемся формулой
$A = frac{k}{2} (x_{1}^{2} — x_{2}^{2} )$.
Подставив сюда приведенные в условии задачи значения, получим:
$A = frac{10^{2} Н/м}{2} [0 — (0,05 м)^{2}] = — 1 250 Дж$.
Так как у сталкивающихся вагонов четыре пружины, то общая работа сил упругости равна — 5000 дж. Знак «минус» означает, что сила упругости пружин направлена против направления перемещения вагонов.
Спрятать решение
Решение.
Сила упругости пружины в начальный момент уравновешивала силу тяжести, действующую на нижний груз:

Центр масс системы движется равноускорено с ускорением g. Пусть через время t после начала движения удлинение пружины максимально. В этот момент скорости грузов должны быть равны:  Центр масс за это время опустится на
Центр масс за это время опустится на  верхний груз на
верхний груз на  нижний груз на
нижний груз на  Запишем закон сохранения механической энергии:
Запишем закон сохранения механической энергии:

Отсюда 
Спрятать критерии
Критерии проверки:
Правильное решение оценивается в 5 баллов независимо от выбранного участником метода.
| Критерий | Баллы |
|---|---|
| Найдено x1 | 1 |
| Указано, что в момент, когда удлинение пружины максимально, скорости грузов равны между собой | 1 |
| Указано, что центр масс движется с постоянным ускорением | 1 |
| Записан закон сохранения механической энергии | 1 |
| Найдено x2 | 1 |
Классификатор: Механика. Закон сохранения энергии в конс. системах
Условие
A4. При абсолютном удлинении на 3 см длина пружины стала равной 27 см. Определите ее начальную длину, если пружину:
а) растянули;
б) сжали.
Решение
| Пружина; деформация; |
| Δl0 = 3 см = 3∙10-2 м; |
| l = 27 см = 27∙10-2 м; |
| а) растянули; |
|
б) сжали;
|
| l0 – ? |
Абсолютное удлинение пружины Δl = |l – l0|.
а) Если тело растягивают, то l > l0 и Δl = l – l0.
Тогда l0 = l – Δl; l0 = 27∙10-2 м – 3∙10-2 м = 24∙10-2 м.
б) Если тело сжимают, то l < l0 и Δl = l0 – l.
Тогда l0 = l + Δl ; l0 = 27∙10-2 м + 3∙10-2 м = 30∙10-2 м = 3,0∙10-1 м.
Основные
понятия
Пружина
растяжения — это спирально-цилиндрическая
пружина, витки которой прилегают друг
к другу. Пружина подвергается действию
противоположно направленных усилий,
приложенных вдоль ее оси.
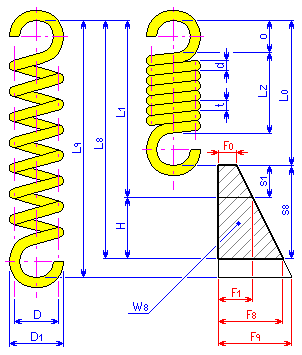
Размеры
|
d |
диаметр |
|
D |
средний |
|
D1 |
наружный |
|
D2 |
внутренний |
|
H |
рабочая |
|
t |
шаг |
|
o |
высота |
|
sx |
деформация |
|
Lx |
длина |
|
Fx |
рабочая |
|
W8 |
энергия |
|
x |
индекс, |
Навивка
-
Вправо
(стандарт) -
Влево
(должна отображаться соответствующая
надпись)
Состояния
-
Свободное:
пружина не нагружена (индекс 0) -
Предварительная
нагрузка: пружина с минимальной рабочей
нагрузкой (индекс 1) -
Полная
нагрузка: пружина с максимальной рабочей
нагрузкой (индекс
-
Предел:
пружина вдавлена до касания витков
(индекс 9).

Зацепы
пружин растяжения
Высота
зацепа пружины растяжения
![]()
Где:
|
L0 |
длина |
|
LZ |
длина |
Часто
используемые зацепы пружин растяжения
|
Тип |
Изображение |
|
Половина |
|
|
Обычно |
|
|
Полный |
|
|
Используется |
|
|
Полный |
|
|
Когда |
|
|
Полный |
|
|
Обычно |
|
|
Поднятый |
|
|
Обычно |
|
|
Два |
|
|
Используется |
|
|
Два |
|
|
Когда |






Расчет
пружин в метрических единицах
Общие
формулы расчета
Коэффициент
использования материала
Наружный
диаметр пружины
D1 =
D + d [мм]
Где:
|
D |
средний |
|
|
d |
диаметр |
Внутренний
диаметр пружины
D2 =
D — d [мм]
Где:
|
D |
средний |
|
|
d |
диаметр |
Рабочая
деформация
H
= L81=
s81[мм]
Где:
|
L8 |
длина |
|
|
L1 |
длина |
|
|
s8 |
деформация |
|
|
s1 |
деформация |
Высота
зацепа пружины
Где:
|
L0 |
длина |
|
|
LZ |
длина |
Индекс
пружины
c
= D/d [-]
Где:
|
D |
средний |
|
|
d |
диаметр |
Поправочный
коэффициент Валя
Где:
|
c |
индекс |
|
|
LZ |
длина |
Начальное
растяжение
![]()
Где:
|
d |
диаметр |
|
|
0 |
напряжение |
|
|
D |
средний |
|
|
Kw |
поправочный |
Общая
сила, действующая в пружине
Где:
|
d |
диаметр |
|
|
G |
напряжение |
|
|
D |
средний |
|
|
Kw |
поправочный |
|
|
G |
модуль |
Жесткость
пружины
Где:
|
d |
диаметр |
|
|
G |
модуль |
|
|
D |
средний |
|
|
n |
количество |
|
|
F8 |
рабочее |
|
|
F1 |
рабочее |
|
|
H |
рабочая |
Расчет
конструкции пружины
При
проектировании пружины подбирается
диаметр проволоки, количество витков
и длина свободной пружины L0 для
заданной нагрузки, материала и сборочных
размеров.
![]()
Если
рассчитанная пружина не соответствует
ни одному значению диаметра проволоки
для данного напряжения 0 согласно
формуле, расчет пружины повторяется с
использованием скорректированного
значения напряжения в свободном состоянии
из рекомендуемого диапазона.
![]()
Пружине
без начального растяжения соответствует
средний рекомендуемый шаг витков t =
0,35 D [мм].
Если
рассчитанная пружина не соответствует
ни одному значению диаметра проволоки
для выбранного шага, расчет пружины
повторяется с использованием
скорректированного значения шага из
рекомендуемого диапазона 0,3 D ≤ t ≤ 0,4
D [мм].
Конструкция
пружины определяется с учетом условия
прочности 8≤ usA и
рекомендуемых диапазонов некоторых
геометрических параметров пружины:
L0≤ D
и L0≤ 31,5
д и 4 ≤ D/d ≤16 и n 2.
Задание
нагрузки, материала и сборочных размеров
пружины
Вначале
выполняется проверка входных величин
для расчета.
Затем
вычисляется длина пружины в свободном
состоянии.
![]()
После
расчета выбирается диаметр проволоки,
количество витков и диаметры пружины
– так, чтобы высота зацепа соответствовала
выбранному типу зацепа. Кроме того,
должны выполняться упомянутые выше
прочностные и геометрические условия.
Конструкция пружины должна удовлетворять
по диаметрам всем заданным начальным
условиям. При отсутствии таких
дополнительных условий предельный
диаметр пружины устанавливается по
геометрическим условиям для
минимально/максимально допустимого
диаметра проволоки.
Отбираются
все диаметры проволоки (от меньшего к
большему), которые проходят по прочностным
и геометрическим условиям. Проверяются
высота зацепа и количество витков. Если
все условия выполнены, расчет конструкции
завершается, и текущие значения параметров
принимаются в качестве его результатов,
независимо от того, как прошел бы расчет
при других подходящих диаметрах
проволоки. Таким образом, полученная
пружина имеет минимально возможный
диаметр проволоки и минимально возможное
количество витков.
Вычисленное
значение высоты зацепа должно находиться
в пределах d ≤ o ≤ 30 d. Комбинация
диаметра проволоки, количества витков
и диаметра пружины должна давать в итоге
такую высоту зацепа, которая удовлетворяет
его типу. Вначале в качестве типа зацепа
берется полный виток, затем, если он не
годится–полный виток внутри и т.д.
Задание
нагрузки, материала и диаметра пружины
Вначале
выполняется проверка входных величин
для расчета.
После
проверки выбирается диаметр проволоки,
количество витков, длина пружины в
свободном состоянии и сборочные размеры
пружины – так, чтобы высота зацепа
соответствовала выбранному типу зацепа.
Кроме того, должны выполняться прочностные
и геометрические условия. Если сборочный
размер L1 или
L8 взят
из спецификации или значение рабочей
деформации пружины ограничено, конструкция
пружины должна соответствовать этому
условию. В остальных случаях предельные
значения сборочных размеров пружины и
ее длины в свободном состоянии определяются
геометрическими условиями для заданного
диаметра пружины и минимального/максимального
допустимого диаметра проволоки.
Формула
для проектирования пружины по заданному
диаметру проволоки.
где
значение 8 =
0,85 A используется
в качестве величины напряжения материала
пружины при кручении в полностью
нагруженном состоянии.
Если
для данного диаметра проволоки не
удается подобрать подходящую комбинацию
размеров пружины, расчетная процедура
оценивает другие диаметры проволоки.
Они проверяются, начиная от меньшего к
большему, до тех пор пока не будет
достигнуто такое количество витков,
при котором высота зацепа удовлетворяет
всем условиям. Расчет конструкции
завершается, и текущие значения параметров
принимаются в качестве его результатов,
независимо от того, как прошел бы расчет
при других подходящих диаметрах
проволоки. Таким образом, полученная
пружина имеет минимально возможный
диаметр проволоки и минимально возможное
количество витков.
Вычисленное
значение высоты зацепа должно находиться
в пределах d ≤ o ≤ 30 d. Для
высоты, вычисленной таким способом,
выбирается соответствующий тип зацепа.
Комбинация диаметра проволоки, количества
витков, длины пружины в свободном
состоянии и сборочных размеров пружины
должна давать в итоге такую высоту
зацепа, которая удовлетворяет его типу.
Вначале в качестве типа зацепа берется
полный виток, затем, если он не
годится–полный виток внутри и т.д.
Задание
максимального рабочего усилия, материала,
сборочных размеров и диаметра пружины
Вначале
выполняется проверка входных величин
для расчета.
Затем
подбирается диаметр проволоки, количество
витков, длина свободной пружины и
минимальное рабочее усилие F1 таким
образом, чтобы высота зацепа пружины
соответствовала выбранному типу зацепа.
Кроме того, должны выполняться прочностные
и геометрические условия.
Формула
для проектирования пружины по заданному
диаметру проволоки.
где
значение 8 =
0,9 A используется
в качестве величины напряжения материала
пружины при кручении в полностью
нагруженном состоянии.
Если
для данного диаметра проволоки не
удается подобрать подходящую комбинацию
размеров пружины, расчетная процедура
оценивает другие диаметры проволоки.
Они проверяются, начиная от меньшего к
большему, до тех пор пока не будет
достигнуто такое количество витков,
при котором высота зацепа удовлетворяет
всем условиям. Расчет конструкции
завершается, и текущие значения параметров
принимаются в качестве его результатов,
независимо от того, как прошел бы расчет
при других подходящих диаметрах
проволоки. Таким образом, полученная
пружина имеет минимально возможный
диаметр проволоки и минимально возможное
количество витков.
Проверочный
расчет пружины
Расчет
соответствующих значений сборочных
размеров и рабочего отклонения для
указанной нагрузки, материала и размеров
пружины.
Сначала
проверяются расчетные входные значения.
Затем на основании приведенных ниже
формул вычисляются сборочные размеры.
Длина
предварительно нагруженной пружины
![]()
Длина
полностью нагруженной пружины
![]()
Где:
|
L0 |
длина |
|
|
F1 |
рабочая |
|
|
D |
средний |
|
|
n |
количество |
|
|
G |
модуль |
|
|
d |
диаметр |
|
|
F8 |
рабочее |
Рабочая
деформация
H
= L18[мм]
Расчет
рабочих сил
Расчет
соответствующих сил, действующих в
пружинах в рабочем состоянии для
указанного материала, сборочных размеров
и размеров пружины. Сначала проверяются
и рассчитываются входные данные, а затем
выполняется расчет рабочих сил с помощью
следующих формул.
Минимальное
рабочее усилие
![]()
Максимальное
рабочее усилие
![]()
Расчет
выходных параметров пружины
Эта
часть является общей для всех типов
расчета пружины. Расчет производится
в следующем порядке.
Коэффициент
высоты зацепа
![]()
Жесткость
пружины
Длина
части с витками
|
Пружина |
|
|
Lz = |
|
|
Пружина |
|
|
Lz = |
Деформация
предварительно нагруженной пружины
s1 =
L1 —
L0 [мм]
Полная
деформация пружины
s8 =
L8 —
L0 [мм]
Напряжение
при кручении материала пружины в
состоянии предварительной нагрузки
Напряжение
материала пружины при кручении при
полном нагружении
Предельное
усилие в пружине
![]()
Деформация
в предельном состоянии
![]()
Где:
|
k |
жесткость |
|
|
F9 |
рабочее |
|
|
F0 |
начальное |
Предельная
длина пружины
L9 =
L0 +
s9 [мм]
Энергия
деформации пружины
![]()
Длина
развернутой проволоки
|
l |
|||
|
Где |
|||
|
для |
|||
|
l0 = D |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = D |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
|||
|
для |
|||
|
l0 = |
Масса
пружины
![]()
Собственная
частота колебаний пружины
Проверка
нагрузки пружины
8≤ us
A
Обзор
используемых переменных:
|
d |
диаметр |
|
k |
жесткость |
|
D |
средний |
|
D1 |
наружный |
|
D2 |
внутренний |
|
F |
обобщенное |
|
G |
модуль |
|
H |
рабочая |
|
c |
индекс |
|
Kw |
поправочный |
|
l |
длина |
|
L |
обобщенная |
|
LZ |
длина |
|
m |
масса |
|
n |
количество |
|
o |
высота |
|
t |
шаг |
|
s |
обобщенная |
|
us |
коэффициент |
|
|
плотность |
|
|
напряжение |
|
A |
допустимое |
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #