
В этой главе…
- Изучаем сложение и вычитание векторов
- Выражаем векторы через координаты
- Разбиваем векторы на компоненты
- Выражаем перемещение, ускорение и скорость в виде векторов
- Определяем изменение скорости под действием тяготения
Довольно трудно добраться в место назначения — пешком ли, на велосипеде ли, на автомобиле ли, на самолете ли — если вы не знаете направления движения. Для успеха путешествия нужно знать не только расстояние, но и направление движения. В главе 3 описывались такие понятия, как перемещение, скорость и ускорение, связанные некоторыми соотношениями, как, например, ( s={}^1!/!_2at^2+v_0t ). С помощью таких соотношений можно получить значения для ускорения, например 27 метров в секунду в квадрате, или для скорости, например 42,7 мили в час. Конечно, полезно знать эти параметры движения, но что можно сказать о направлении движения?
В реальном мире просто необходимо знать направление движения. Именно векторы обозначают такое направление. Очень многие люди ошибочно считают векторы очень сложными объектами, но это совсем не так. В этой главе вы узнаете, насколько легко и просто можно обращаться с ними при решении задач.
Содержание
- Осваиваем векторы
- Определяем направление: основные свойства векторов
- Комбинируем направления: сложение векторов
- Вычисляем разницу расстояний: разность векторов
- Облекаем векторы в числа
- Разбиение вектора на компоненты
- Ищем компоненты вектора по заданной величине и углу
- Находим величину и направление вектора по его компонентам
- Срываем покров с векторов
- Перемещение — тоже вектор
- Скорость — еще один вектор
- Ускорение — еще один вектор
- Упражнение со скоростью: скользим по радуге
Осваиваем векторы
В главе 3 мы работали с простыми числами или измерениями, которые в физике называются величинами. Например, в результате измерения перемещения на 3 метра получена величина перемещения 3 метра. Вектор отличается от величины еще и наличием направления. В повседневной жизни на вопрос о пути понятие “вектор” возникает в виде следующего ответа встречного человека: “Это в 15 милях отсюда”. При этом величина вектора равна 15 милям, а направление вектора определяется взмахом руки. Когда вы навешиваете дверь на петли, то порой слышите совет: “Толкните сильнее влево”. Вот вам еще один вектор! Когда вы объезжаете препятствие на дороге, вам приходится ускоряться и замедляться в разных направлениях. Вот еще несколько векторов!
Векторы встречаются в обыденных ситуациях, например в дорожных указателях, инструкциях по сборке или даже при попытке избежать столкновения со встречным. Поскольку физика стоит за всеми событиями повседневной жизни, то не удивительно, что многие физические концепции, например скорость, ускорение, сила, являются векторами. По этой причине следует поближе познакомиться с векторами, поскольку они присутствуют во всех разделах физики. Вектор — это фундаментальное понятие физики.
Определяем направление: основные свойства векторов
При работе с векторами нужно иметь в виду его направление и величину. Физический параметр без направления, а только с величиной называется скаляром. Если к скаляру добавить направление, то получим вектор.
Визуально в физических задачах вектор отображается в виде стрелки. Действительно, стрелка имеет величину (т.е. длину) и направление (т.е. острие). Взгляните на рис. 4.1. Эта стрелка и есть вектор с началом в тупом конце и с окончанием — в заостренном конце.
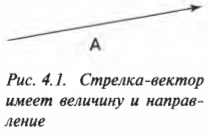
Векторы можно использовать для представления силы, ускорения, скорости и других физических параметров. В физике для обозначения векторов используют полужирное начертание, например A. В некоторых книгах векторы обозначают стрелкой над символом, например ( overrightarrow{A} ) . Стрелка обозначает, что у данного параметра A, помимо величины, есть также направление.
Допустим, какой-то умник предложит вам дать пример вектора. Проще простого! Достаточно сказать, что у некого вектора А есть некая величина и некоторое направление. Убежден, что это произведет на умника оглушительное впечатление! Например, скажите, что вектор А направлен под углом 15° к горизонтали и имеет величину 12 метров в секунду. Итак, любопытный умник получит исчерпывающую информацию о векторе А.
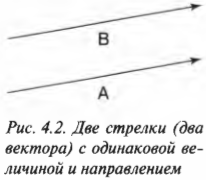
На рис. 4.2 показаны два вектора, А и В. Они очень похожи, поскольку обладают одинаковой длиной и направлением. Фактически оба эти вектора равны. Если два вектора равны по величине и направлению, то они считаются равными, т.е. А = В.
Очень скоро читатель станет настоящим экспертом в области векторов. Уже сейчас нам известно, что, когда мы встречаемся с символом А, это значит, что данный параметр обладает величиной и направлением, т.е. является вектором, а два вектора считаются равными, если они имеют одинаковую величину и направление. Но это еще далеко не все. Допустим, чтобы найти нужный вам отель, нужно проехать 20 миль к северу, а потом 20 миль на восток. Так насколько далеко и в каком направлении находится этот отель?
Комбинируем направления: сложение векторов
Два вектора можно сложить и получить результирующий вектор, который является суммой обоих векторов и определяет расстояние и направление до цели.
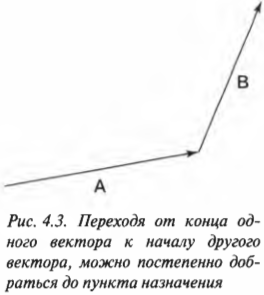
Допустим, что прохожий говорит вам, что для достижения пункта назначения вам нужно сначала следовать вектору А, а потом вектору В. Так где же находится в этом случае ваш пункт назначения? Сначала нужно проехать по пути, указанному вектором А, а потом по пути, указанному вектором В, как показано на рис. 4.3.
Когда вы доберетесь до конца вектора В, насколько далеко вы будете находиться от исходной точки? Для ответа на этот вопрос начертим еще один вектор С от исходной точки и до конечной точки путешествия, как показано на рис. 4.4.
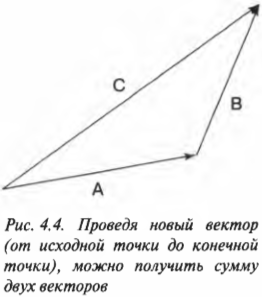
Новый вектор С представляет собой результат всего путешествия от начала и до самого конца. Все, что нужно сделать, чтобы получить его, так это начертить оба вектора А и В и соединить новым результирующим вектором С.
Сумма векторов достигается за счет того, что начало одного вектора помещается в конец другого, т.е. суммарный вектор проходит от начала одного до конца другого вектора. Иначе говоря, С = А + В. При этом С называется суммой векторов, результатом сложения векторов, или результирующим вектором. Не думайте, что этим ограничиваются возможности комбинирования векторов, ведь векторы можно и вычитать.
Вычисляем разницу расстояний: разность векторов
А что если некто предложит вам векторы С и А, показанные на рис. 4.4, и попросит найти их разность? Их разностью является вектор В, поскольку при сложении векторов А и В получается вектор С. Чтобы объяснить эту мысль, нужно прояснить смысл вычитания вектора А из вектора С: т.е. смысл операции С — А.
Для вычитания двух векторов нужно расположить вместе основания векторов (т.е. концы векторов без остриев), а не совмещать основание одного вектора и острие другого вектора, как при сложении векторов. Затем нужно провести результирующий вектор, который является разностью двух векторов, от острия вычитающего вектора (А) к острию вычитаемого вектора (С). На рис. 4.5 показан пример вычитания вектора А из вектора С (иначе говоря, приведен пример С — А). Как видите, результат такого вычитания равен вектору В, поскольку С = А + В.
Еще один (и для некоторых более простой) способ вычитания векторов заключается в обращении направления второго вектора (т.е. вектора А в разности С — А) и сложении двух векторов: вектора С и обращенного вектора А (т.е. совмещении острия обращенного вектора А с основанием вектора С с последующим проведением результирующего вектора от основания обращенного вектора А к острию вектора С).
Как видите, сложение и вычитание векторов может происходить с одними и теми же векторами в одной задаче. На самом деле с векторами можно выполнять и некоторые другие математические операции. Изложенный выше материал означает, что с векторами можно оперировать так же, как со скалярами, например С = А + В, С — А = В и т.д. Как видите, векторы очень похожи на числа.
Облекаем векторы в числа
Векторы удобно представлять в виде стрелок, но это не всегда самый точный способ работы с ними. Векторы гораздо точнее можно характеризовать числами. Рассмотрим пример сложения векторов А + В, показанных на рис. 4.6.
Предположим, что измерения на рис. 4.6 даны в метрах. Это значит, что вектор А направлен на 1 метр вверх и на 5 метров вправо, а вектор В направлен на 1 метр вправо и на 4 метра вверх. Для получения параметров результирующего вектора С нужно сложить горизонтальные измерения обоих векторов и отдельно сложить вертикальные измерения обоих векторов.
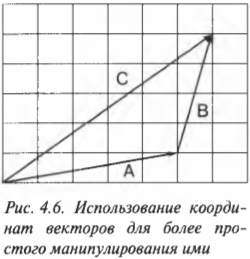
Результирующий вектор С направлен на 6 метров вправо и на 5 метров вверх. Как видите, для получения вертикального измерения вектора С нужно сложить вертикальное измерение вектора А и вертикальное измерение вектора В. А для получения горизонтального измерения вектора С нужно сложить горизонтальное измерение вектора А и горизонтальное измерение вектора В.
Если процедура сложения векторов все еще очень туманна для вас, то тогда можно использовать другую систему обозначений векторов. Поскольку вектор А “простирается” на 5 метров вправо (в положительном направлении оси X) и на 1 метр вверх (в положительном направлении оси Y), то его можно выразить в координатах (х,у), например А = (5;1). Аналогично, поскольку вектор В “простирается” на 1 метр вверх (в положительном направлении оси X) и на 4 метра вправо (в положительном направлении оси Y), то его можно выразить в координатах (х,у), например В = (1;4).
С помощью такой системы обозначений сложение векторов существенно упрощается. Итак, для сложения двух векторов достаточно сложить их координаты по осям X и Y, чтобы получить координаты результирующего вектора по осям X и Y:

Получается, что весь секрет сложения векторов заключается в разбиении каждого вектора на координаты по осям X и Y с последующим их сложением, чтобы соответственно получить координаты X и Y результирующего вектора? Конечно, работа с этими числами для получения координат X и Y результирующего вектора требует некоторых усилий, но они достаточно просты, чтобы с успехом их выполнить.
Допустим, что нужный вам отель находится на расстоянии 20 миль к северу и на расстоянии 20 миль на восток. Как будет выглядеть вектор, направленный из исходной точки к этому отелю? С помощью координатного представления эта задача решается очень легко. Допустим, что положительное направление оси X направлено на восток, а положительное направление оси Y — на север. На первом этапе нужно проехать 20 миль на север, а на втором этапе — 20 миль на восток. В векторном представлении эта задача формулируется следующим образом (восток [X]; север [Y]):
Чтобы сложить эти два вектора, нужно сложить их координаты по соответствующим осям:

Результирующий вектор, который указывает на отель, имеет вид (20; 20).
Рассмотрим еще один пример удачного применения такого представления векторов. Допустим, что вы едете на гоночном автомобиле со скоростью 150 миль в час на восток и видите в зеркало заднего вида приближающегося соперника. Нет проблем, нужно лишь удвоить скорость:

Теперь вы уже не едете, а почти “летите” со скоростью 300 миль в час, но в том же направлении. Итак, в этой задаче демонстрируется процедура умножения вектора на скаляр.
Разбиение вектора на компоненты
Формулировки задач по физике с использованием векторов не всегда так просты, как предыдущие примеры с манипуляциями векторов. Рассмотрим первый вектор на рис. 4.1 с координатами (4; 1) и сравним его со следующей типичной формулировкой физической задачи: найти время перемещения шара со скоростью 7 метров в секунду по наклонной плоскости с длиной основания 1 м, расположенной под углом 15°. С помощью дальнейшей информации в этом разделе вы научитесь находить компоненты векторов и легко и просто манипулировать ими.
Ищем компоненты вектора по заданной величине и углу
Чтобы определить координаты вектора, нужно научиться разбивать векторы на части, которые называются компонентами. Например для вектора (4; 1) Х-компонентой является число 4, а Y-компонентой — число 1.
Часто в физической задаче задается угол и величина вектора, а его компоненты нужно определить. В предыдущем примере известно, что шар катится со скоростью 7 метров в секунду по наклонной плоскости с длиной основания 1 м, расположенной под углом 15°. Для определения времени перемещения шара от одного конца плоскости к другому нам потребуется разобраться только с Х-компонентой. То есть, задача сводится к определению времени перемещения на расстояние 1 метр вдоль оси X. Для ответа на этот вопрос нужно определить скорость перемещения шара по оси X.
Итак, нам известно, что шар движется со скоростью 7 метров в секунду под углом 15° к горизонтали (т.е. положительного направления оси X). В данной формулировке скорость является вектором ( mathbf{v} ) с величиной 7 метров в секунду и направлением 15° к горизонтали.
Теперь нам нужно определить Х-компоненту вектора скорости шара, чтобы определить скорость перемещения шара вдоль основания наклонной плоскости. Х-компонента скорости является скаляром (т.е. имеет только значение, а не значение, направление и точку приложения, как вектор) и обозначается как ( v_x ). Аналогично, Y-компонента скорости шара также является скаляром и обозначается как ( v_y ). Итак, вектор скорости можно выразить через его компоненты:

Именно так выражается разложение вектора на компоненты. Так чему же равны компонента ( v_x ) и компонента ( v_y )? Скорость имеет величину ( v ) (7 метров в секунду) и направление ( theta ) (угол 15° к горизонтали). Также нам известна длина основания наклонной плоскости (1,0 метр). На рис. 4.7 показана схема тригонометрических функций (о, Боже, только не это!), которые описывают направление вектора скорости и помогут нам определить его компоненты. Не стоит волноваться: тригонометрические соотношения не так уж и сложны, если известен угол ( theta ), показанный на рис. 4.7. Величина (или модуль) вектора ( mathbf{v} ) равна ( v ) (иногда если вектор обозначается символом ( v ), то его модуль обозначают символом ( overline{v} )), а его компоненты определяются с помощью рис. 4.7:
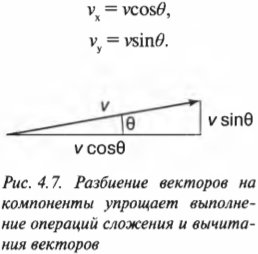
Рекомендуется хорошенько запомнить указанные выше выражения для компонент вектора, поскольку нам придется довольно часто встречаться с ними в курсе физики.
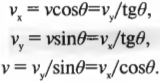
Теперь можно пойти немного дальше и попробовать связать отдельные стороны треугольника на рис. 4.7. Это можно легко сделать, если вспомнить соотношение для тангенса ( tg,theta=sintheta/costheta ) и воспользоваться соотношениями для компонент скорости:
Зная соотношение ( v_x=vcostheta ), можно найти величину Х-компоненты скорости шара ( v_x=vcostheta ):

Подставляя числа, получим

Итак, теперь мы знаем, что горизонтальная скорость шара равна 6,7 метров в секунду. Поскольку длина основания наклонной плоскости равна 1,0 метра, то это расстояние шар преодолеет за время:

Таким образом, благодаря тому, что мы научились определять компоненту скорости, нам удалось легко найти решение все задачи: шару потребуется 0,15 секунды для перемещения вдоль наклонной плоскости. А чему равна Y-компонента скорости? Это можно очень легко определить, поступая аналогично:

Находим величину и направление вектора по его компонентам
Иногда требуется определить угол наклона вектора, если известны его компоненты. Например, предположим, что вы ищите отель, расположенный на 20 миль к северу и на 20 миль к востоку. Под каким углом нужно двигаться к нему и насколько далеко он находится? Условия этой задачи можно записать с помощью уже известных нам векторных обозначений (см. предыдущий раздел):
После сложения этих двух векторов получим следующий результат:

Результирующий вектор, который указывает на отель, имеет вид (20; 20). Это еще один способ указания вектора с помощью его компонент. Итак, вернемся к прежнему вопросу: под каким углом нужно двигаться к отелю и насколько далеко он находится от текущего положения? Иначе говоря, глядя на рис. 4.8, прежний вопрос теперь звучит так: “Чему равны ( h ) и ( theta )?”
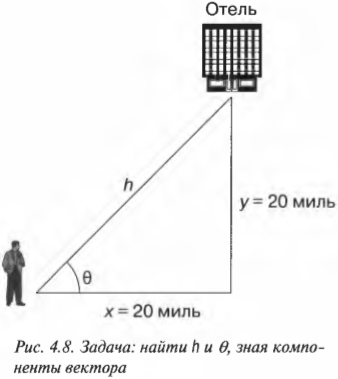
Найти ( h ) не так уж и трудно, пользуясь теоремой Пифагора:
Подставляя численные значения, получим:

Итак, отель находится на расстоянии 28,3 мили. А под каким углом ( theta ) нужно ехать к нему по прямой? Пользуясь основными тригонометрическими соотношениями, можно записать:

Иначе говоря:

Теперь для определения угла нужно использовать функции, обратные синусу и косинусу:
(Строго говоря, обратной синусу функцией является функция “арксинус”, или ( arcsin(x) ), а обратной косинусу — “арккосинус”, или ( arccos(x) ). Обозначения ( sin^{-1}(x) ) и ( cos^{-1}(x) ) часто используются для обозначения функций “арксинус” и “арккосинус”, но их не рекомендуется употреблять, чтобы не путать с функциями ( 1/sin(x) ) и ( 1/cos(x) ). — Примеч. ред.)
Как вычислить значения функций, обратных синусу (( sin^{-1} )) и косинусу (( cos^{-1} ))? Очень просто, ведь в любом инженерном калькуляторе есть кнопки для таких функций! (Например, в программе Калькулятор операционной системы Windows достаточно ввести число, установить флажок параметра Inv (Обратная) и щелкнуть на кнопке sin (Синус). — Примеч. ред.) Достаточно ввести число и нажать соответствующую кнопку, если таковая имеется, например с надписью arcsin (арксинус). В данном случае для угла ( theta ) получим следующий результат вычислений:

Итак, отель находится на расстоянии 28,3 мили и под углом 45°. Вот так, легко и просто мы успешно решили еще одну физическую задачу!
Аналогично, можно определить угол ( theta ) без необходимости промежуточного вычисления ( h ) с помощью других сведений из тригонометрии:
(Строго говоря, обратной тангенсу функцией является функция “арктангенс”, или ( arctg(x) ). Обозначение ( tg^{-1}(x) ) часто используется для обозначения функции “арктангенс”, но его не рекомендуется употреблять, чтобы не путать с функцией ( 1/tg(x) ). — Примеч. ред.)
Срываем покров с векторов
У нас есть два способа описания векторов для решения физических задач. Первый основан на использовании компонент по осям X и Y, а второй — на величине (модуле) и направлении вектора (угол обычно задается в градусах от 0° до 360°, где угол 0° соответствует направлению вдоль положительного направления оси X). Знание правил взаимного преобразования этих двух способов описания имеет очень большое значение, поскольку для операций с векторами удобно использовать компоненты вектора, а в формулировке физических задач обычно задаются величины и углы векторов.
Вот как выглядит формула преобразования двух способов описания векторов:

В этом уравнении предполагается, что ( theta ) — это угол между горизонтальной компонентой и гипотенузой ( h ) (т.е. самой длинной стороной прямоугольного треугольника, расположенного напротив прямого угла), как показано на рис. 4.8. Если угол не известен, то его можно вывести, если запомнить, что сумма всех углов треугольника равна 180°, а в прямоугольном треугольнике, если вычесть величину прямого угла 90°, то сумма остальных двух углов равна 90°.
Если вам известны компоненты (х,у), то его величину и направление можно определить по следующим формулам:

Такого рода преобразования нужно уметь легко выполнять, поскольку они довольно часто встречаются в задачах. На этом месте часто многие приходят в растерянность и не могут освоить дальнейший материал именно потому, что не овладели простыми правилами разложения вектора на компоненты.
Перемещение — тоже вектор
Перемещение ( s ) следует обозначать ( mathbf{s} ), как вектор с определенной величиной и направлением (для обозначения векторов иногда используют стрелку, которая располагается над именем переменной, например ( overrightarrow{s} ) ). В реальном мире очень важно знать не только величину, но и направление перемещения.
Допустим, что сбылись ваши детские мечты и вы стали звездой бейсбола. Вот вам нужно стремглав бежать к первой базе на расстоянии 90 футов по прямой. Но в каком направлении находится первая база? Допустим, что она находится под углом 45°, как показано на рис. 4.9. Тогда вектор вашего перемещения ( mathbf{s} ) имеет величину 90 футов и направление 45°. А какими будут компоненты этого вектора? Это очень просто:

Скорость — еще один вектор
Представьте себе, что вы бежите к первой базе с вектором перемещения s с величиной 90 футов и направлением 45° по отношению к оси X. Тут стоило бы задаться вопросом: “Позволит мне моя скорость опередить игрока на первой базе?” Хороший вопрос. Достанем калькулятор и подсчитаем скорость, если известно, что для достижения первой базы вам требуется 3 секунды. Для определения скорости нужно поделить величину вектора ( mathbf{s} ) на это время:

В этом выражении вектор перемещения делится на скаляр времени. Результатом такого деления является тоже вектор, а именно вектор скорости:

Итак, ваша скорость равна 30 футам в секунду под углом 45° и эта скорость является вектором ( mathbf{v} ). Деление вектора на скаляр дает вектор другой величины, но такого же направления. В данном примере деление вектора перемещения ( mathbf{s} ) на скаляр времени дает в результате вектор ( mathbf{v} ). Он имеет такую же величину, что и величина перемещения, деленная на величину времени, но теперь вектор ( mathbf{v} ) также имеет определенное направление, которое определяется направлением вектора перемещения ( mathbf{s} ). Итак, в данном примере мы научились манипулировать с векторами, как со скалярами в главе 3, и получать вектор в результате этих манипуляций.
Допустим, что после этих вычислений вы пришли к выводу, что такой скорости недостаточно, чтобы опередить соперника. Ну что ж, нужно срочно изменить направление!
Ускорение — еще один вектор
Что произойдет, если в процессе движения внезапно изменить направление? Вы сразу же почувствуете изменение скорости, а значит, ощутите ускорение. Как и скорость, ускорение ( mathbf{a} ) является вектором.
Предположим, что в предыдущем примере нужно изменить скорость Y-компоненты скорости до величины 25 футов в секунду, чтобы избежать встречи с соперником, причем вам известно, что вы способны отклониться от курса на 90° с ускорением 60 футов в секунду в квадрате (в отчаянной попытке увильнуть от соперника). Достаточно ли этого ускорения для изменения скорости за ту долю секунды, которая отделяет вас от встречи с соперником?
Разница конечного ( t_1 ) и начального ( t_0 ) момента времени равняется изменению времени ( Delta t ). Теперь изменение скорости легко найти по следующей формуле:

Теперь попробуем вычислить изменение скорости от исходной скорости на основе данных на рис. 4.10.
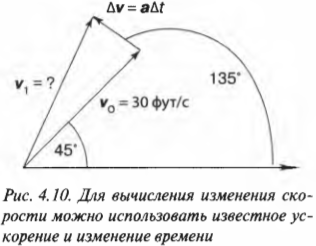
Для поиска конечного значения скорости ( mathbf{v_1} ) нужно выполнить операцию сложения векторов. Это значит, что нужно разложить на компоненты вектор исходной скорости ( mathbf{v_0} ) и вектор изменения скорости ( Delta v ). Вот как выглядят компоненты исходной скорости ( mathbf{v_0} ):

Полпути пройдено. Итак, чему равно изменение скорости ( Delta!mathbf{v} )? Известно, что ( Delta!mathbf{v}=mathbf{a}Deltamathbf{t} ), а ( mathbf{a} ) = 60 футов в секунду2 под углом 90° к прежнему направлению движения, как показано на рис. 4.10. Итак, подсчитаем величину изменения скорости ( Delta!mathbf{v} ) по формуле ( Delta!mathbf{v}=mathbf{a}Deltamathbf{t} ):

Но что можно сказать о направлении ( Delta!mathbf{v} )? Если взглянуть на рис. 4.10, то можно увидеть, что изменение скорости ( Delta!mathbf{v} ) направлено под углом 90° к текущему направлению движения, которое ориентировано под углом 45° к положительному направлению оси X. Следовательно, изменение скорости ( Delta!mathbf{v} ) направлено под углом 135° к положительному направлению оси X. Теперь можно получить выражение для компонент вектора изменения скорости ( Delta!mathbf{v} ):

Теперь остается только выполнить сложение векторов для поиска конечной скорости:

Итак, получен результат ( mathbf{v_1} ) = (17,0 фута в секунду; 25,4 фута в секунду). Y-компонента конечной скорости больше необходимой величины, которая равна 25,0 фута в секунду. После завершения этих вычислений можно спрятать калькулятор и смело выполнить запланированный вираж. Представьте себе, что к изумлению окружающих вам удалось уклониться от соперника и успешно достигнуть места назначения — первой базы (какой крутой поворот вам пришлось для этого выполнить!). Болельщики изумлены и приветствуют вас, а вы, небрежно касаясь кепки кончиками пальцев, отдаете им честь, зная, что все это стало возможным благодаря превосходному знанию физики. После затишья вы украдкой бросаете взгляд на вторую базу: а не закрепить ли успех и попробовать добежать до второй базы? Для этого снова придется достать калькулятор и определить компоненты векторов.
Именно так нужно работать с векторами разных физических параметров: перемещения, скорости и ускорения. Теперь, обладая такими знаниями, можно перевести скалярные уравнения из главы 3 в векторную форму, например, вот так:

Обратите внимание, что полный вектор перемещения — это комбинация перемещения с начальной скоростью и перемещения с постоянным ускорением.
Упражнение со скоростью: скользим по радуге
Хотя сила гравитации подробно описывается в главе 6, но здесь мы рассмотрим результат действия этой силы на небольшом примере с векторами в двух измерениях. Представьте себе, что мячик для игры в гольф движется по горизонтальной вершине скалы со скоростью 1,0 м/с и вскоре сорвется с края скалы на высоте 5 метров от поверхности Земли, как показано на рис. 4.11. Насколько далеко улетит мячик и с какой скоростью он столкнется с поверхностью Земли? В этой задаче прежде всего нужно определить время движения мячика.

Приступим к сбору фактов. Нам известно, что компоненты скорости мячика равны (1; 0), и он находится на высоте 5 метров от поверхности Земли. В процессе падения под действием силы тяготения Земли он движется с постоянным ускорением, ( g ), величина которого равна около 9,8 м/с2.
Итак, как определить, насколько далеко он упадет от края скалы? Один из способов решения этой задачи основан на определении времени движения мячика до столкновения с поверхностью Земли. Поскольку мячик ускоряется только в направлении оси Y (т.е. вертикально вниз), а его компонента скорости по оси X, ( v_x ), не меняется, то пройденное по горизонтали расстояние до столкновения будет равно ( v_xt ), где ( t ) — время движения мячика до столкновения. Сила тяготения ускоряет мячик по вертикали, а значит, перемещение по вертикали (т.е. вдоль оси Y) равно:

В данном случае перемещение по вертикали ( s_y ) = 5 метров, а ускорение ( a_y ) = ( g ) = 9,8 м/с2. Поэтому предыдущее уравнение принимает вид:

Это значит, что время движения мячика до столкновения равно:
Итак, мы вычислили, что мячик будет находиться в полете 1,0 секунды. Отлично, явный прогресс! Поскольку компонента скорости мячика по оси X не изменялась в течение этого времени, то можно легко вычислить расстояние, которое пролетит мячик по горизонтали (т.е. вдоль оси X) за это время:

Подставляем числа и получаем:

Итак, мячик столкнется с поверхностью Земли на расстоянии 1,0 метра по горизонтали.
Теперь можно приступать ко второму вопросу задачи: попробуем определить скорость мячика в момент столкновения с поверхностью Земли. Частично ответ на этот вопрос мы уже знаем, поскольку компонента скорости мячика по оси X не изменялась. Однако по вертикали сила тяготения ускорила мячик по вертикали (т.е. вдоль оси Y), а потому компоненты конечной скорости имеют следующий вид: (1,0; ?). Итак, нам нужно определить величину компоненты скорости мячика по оси Y, обозначенной вопросительным знаком. Воспользуемся следующим соотношением для компоненты скорости по вертикали:
В данном случае начальная скорость ( v_{y0} ) = 0, постоянное ускорение ( a_y=g ) и нужно определить только конечную скорость ( v_{y1} ). Поэтому предыдущее уравнение приобретает следующий вид:

Подставляем числа и получаем:

Ускорение свободного падения, ( g ), также является вектором ( mathbf{g} ). Он направлен к центру Земли, т.е. в отрицательном направлении оси Y, а на поверхности Земли его величина равна около -9,8 м/с2.
Отрицательный знак здесь обозначает направление вниз вектора ( mathbf{g} ), т.е. в отрицательном направлении оси Y. Итак, подставляем обновленное значение ускорения и получаем:

Итак, компоненты конечной скорости мячика равны (1,0; -9,8) м/с. Чтобы найти величину вектора скорости (а не его отдельных компонент) в момент столкновения с поверхностью Земли, выполним следующие вычисления:

Триумфальный финал! Мячик пролетит 1,0 метра по горизонтали и столкнется с поверхностью Земли со скоростью 9,9 м/с. Совсем неплохо для начала.
Глава 4. Едем по указателям
3.8 (75%) 8 votes
Содержание:
Путь и перемещение:
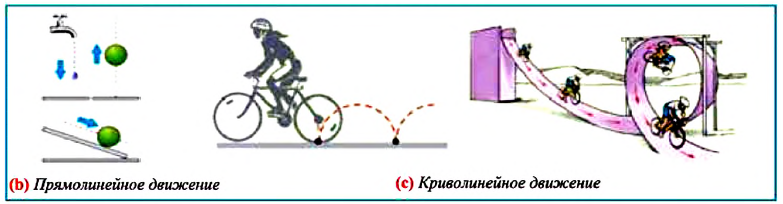
Вы знаете, что любой вид движения совершается по определенной траектории.
Траектория — это линия, которую описывает материальная точка при своем движении в данной системе отсчета. Эта линия может быть и невидима, например, траектория движения рыбы в воде, самолета в небе, пчелы в воздухе и др., которые можно только вообразить. По форме траектории механическое движение делится на прямолинейное и криволинейное.
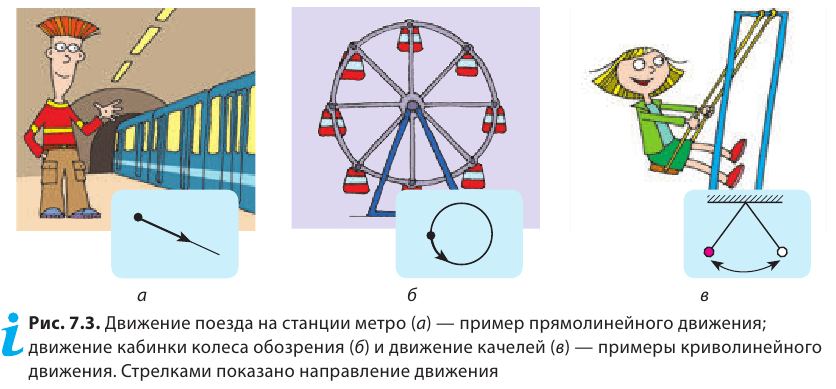
Движение, траектория которого представляет собой прямую линию относительно данной системы отсчета, называется прямолинейным движением (b), а движение, траектория которого кривая линия, — криволинейным (с).
Длина траектории движения материальной точки, называется пройденным путем. Пройденный путь является положительной скалярной величиной, обозначается буквой 
Для полного описания движения материальной точки необходимо определить изменение его положения в пространстве с течением времени, т.е. определить изменение координат материальной точки, или же изменение его радиус-вектора.
Изменение любой физической величины равно разности его конечного и начального значений и обозначается знаком  (буква греч. алфавита) перед этой величиной.
(буква греч. алфавита) перед этой величиной.
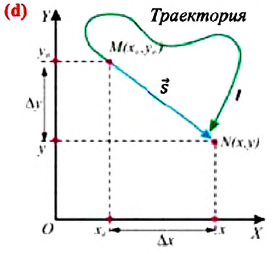
Изменение координат материальной точки во время движения
Изменение координат материальной точки во время движения может быть, как положительным, так и отрицательным. Например, предположим, что муравей, двигаясь по показанной на рисунке траектории, попадает из точки М в точку N (d). Так как координата муравья по оси X увеличивается  то изменение координаты по этой оси будет положительным:
то изменение координаты по этой оси будет положительным:  Координата же муравья по оси У уменьшается
Координата же муравья по оси У уменьшается  поэтому изменение его координаты по этой оси будет отрицательным:
поэтому изменение его координаты по этой оси будет отрицательным: 
Изменение радиус-вектора материальной точки во время движения
На следующем рисунке представлены радиус-векторы  и
и  начального и конечного положения, материальной точки (муравья) соответственно (е). Вектор
начального и конечного положения, материальной точки (муравья) соответственно (е). Вектор  соединяющий концы этих радиус-векторов
соединяющий концы этих радиус-векторов  называют перемещением данной материальной точки за промежуток времени
называют перемещением данной материальной точки за промежуток времени  Согласно правилу сложения векторов:
Согласно правилу сложения векторов:  Из последнего выражения получается,
Из последнего выражения получается,  или
или  где
где  — перемещение материальной точки.
— перемещение материальной точки.
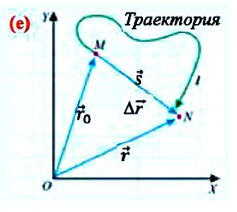
Перемещение — это направленный отрезок прямой, соединяющий начальное положение движущейся материальной точки с ее конечным положением. Перемещение — векторная величина.
Векторная величина — это величина, определяемая, кроме числового значения (модуля), также и направлением.
К вектору перемещения, как векторной величине, можно применить известные действия над векторами — сложение и вычитание векторов, определение результирующего вектора методом треугольника и параллелограмма.
Единицей измерения перемещения, как и пути, в СИ является метр, однако, перемещение имеет отличающийся физический смысл: перемещение показывает, на какое расстояние и в каком направлении изменилось начальное положение материальной точки за данный промежуток времени.
Внимание! Только при прямолинейном движении без изменения направлении, модуль перемещения равен пройденному пути, во всех остальных случаях (при изменении направления прямолинейного движения, криволинейном движении) пройденный путь больше модуля перемещения (е).
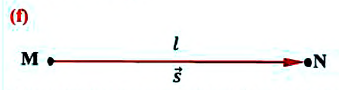
Материальная точка прошла расстояние  от точки М до точки N по прямой линии. В этом случае пройденный путь равен модулю перемещения:
от точки М до точки N по прямой линии. В этом случае пройденный путь равен модулю перемещения: 

Материальная точка прошла расстояние  от точки М до точки N по прямой линии, а затем по этой же линии вернулась назад в точку
от точки М до точки N по прямой линии, а затем по этой же линии вернулась назад в точку  В этом случае материальная точка прошла путь, равный
В этом случае материальная точка прошла путь, равный  а модуль перемещения равен нулю:
а модуль перемещения равен нулю:

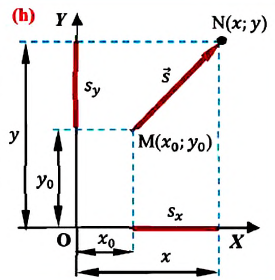
Если при движении материальной точки на плоскости известны его начальные координаты и вектор перемещения, то можно определить координаты конечного положения точки. Например, предположим, что материальная точка совершила перемещение  Опуская перпендикуляры на оси ОХ и OY из начала и конца этого вектора, получаем проекции перемещения
Опуская перпендикуляры на оси ОХ и OY из начала и конца этого вектора, получаем проекции перемещения  и
и  (h). Как видно из рисунка, эти проекции равны разности начальных и конечных координат материальной точки:
(h). Как видно из рисунка, эти проекции равны разности начальных и конечных координат материальной точки:

Одинаковы ли путь и перемещение
Задача:
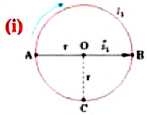
Велосипедист движется по круговому велотреку радиусом 80 м. Он стартует из точки А. Определите путь и перемещение велосипедиста при первом прохождении точки В (i).
Дано:

Решение:
Пройденный путь  равен длине дуги:
равен длине дуги: 
Модуль перемещения же равен диаметру окружности: 
Вычисление:
Что такое путь и перемещение
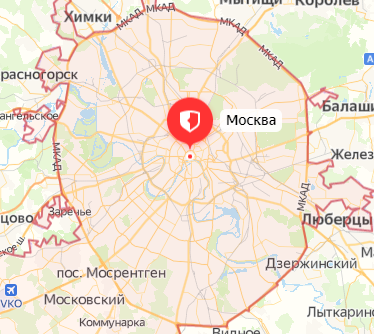
Автобус отправился из Москвы в 9 часов утра. Можно ли определить, где находился автобус в 11 часов, если известно, что он проделал путь
Конечно, нет. Ясно лишь, что в 11 часов он находился в месте, удаленном от Минска не более чем на 100 км (т. е. внутри окружности, изображенной на рисунке 37). Не исключено, что к 11 часам автобус вернулся в Москву.
Значит, для определения конечного положения тела недостаточно знать его начальное положение и пройденный им путь.
Мы нашли бы местонахождение автобуса в 11 часов, если бы знали траекторию его движения (зеленая линия на рисунке 38). Отсчитав 100 км от начальной точки маршрута вдоль траектории, найдем, что в 11 часов автобус прибыл в Борисов.
А можно поступить иначе. Конечное положение автобуса можно определить, зная его начальное положение и всего одну векторную величину, называемую перемещением.
Перемещение — это вектор, соединяющий начальное положение тела с его конечным положением (для данного промежутка времени).
Обозначим перемещение символом  На рисунке 38 вектор
На рисунке 38 вектор  — это перемещение автобуса из Минска в Мытищи, вектор
— это перемещение автобуса из Минска в Мытищи, вектор  — из Мытищь в Балашиху, а вектор
— из Мытищь в Балашиху, а вектор  — из Минска в Борисов.
— из Минска в Борисов.
Теперь, даже не зная траектории, по начальной точке и перемещению мы можем найти конечную точку для каждого из участков движения автобуса и для всего маршрута в целом.
Можно ли сравнивать путь S, пройденный телом, с его перемещением  Нельзя, поскольку путь S — скаляр, а перемещение
Нельзя, поскольку путь S — скаляр, а перемещение  — вектор.
— вектор.
Сравнивать путь S можно с модулем перемещения  который является скалярной величиной. Равен ли путь модулю перемещения?
который является скалярной величиной. Равен ли путь модулю перемещения?
В рассматриваемом примере путь, пройденный автобусом за два часа,  Он равен длине траектории движения автобуса от Москвы через Мытищи до Балашихи (см. рис. 38). А модуль перемещения автобуса за это время равен расстоянию от Минска до Борисова:
Он равен длине траектории движения автобуса от Москвы через Мытищи до Балашихи (см. рис. 38). А модуль перемещения автобуса за это время равен расстоянию от Минска до Борисова:  Путь автобуса больше модуля его перемещения:
Путь автобуса больше модуля его перемещения: 
Пройденный путь был бы равен модулю перемещения, если бы автобус все время двигался по прямой, не изменяя направления движения.
Следовательно, путь всегда не меньше модуля перемещения:

Как складывают между собой пути и как — перемещения? Из рисунка 38 находим:

Пройденные пути складывают арифметически, а перемещения — по правилам сложения векторов.
Равен ли при этом модуль  сумме модулей
сумме модулей  Ответьте самостоятельно.
Ответьте самостоятельно.
Мы выяснили, что путь и траектория относительны. Покажите на примерах, что перемещение тоже относительно, т. е. зависит от выбора системы отсчета.
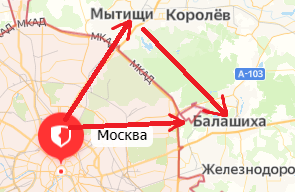
При решении задач важно уметь находить проекции перемещения. Построим вектор перемещения куска мела по школьной доске из точки А в точку С (рис. 39). Из рисунка видно, что проекции вектора  на координатные оси Ох и Оу равны разности координат конца и начала этого вектора:
на координатные оси Ох и Оу равны разности координат конца и начала этого вектора:

Главные выводы:
- Путь — это длина участка траектории, пройденного телом за данный промежуток времени. Путь — положительная скалярная величина.
- Перемещение тела — это вектор, соединяющий начальное положение тела с его конечным положением (для данного промежутка времени).
- Путь не меньше модуля перемещения тела за то же время.
- Пройденные пути складываются арифметически, а перемещения — по правилам сложения векторов.
Пример:
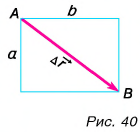
Конькобежец пересек прямоугольную ледовую площадку по диагонали АВ, а пешеход прошел из точки А в точку В по краю площадки (рис. 40). Размеры площадки 60 х 80 м. Определите модули перемещения конькобежца и пешехода и пути, пройденные ими.
Решение
Из рисунка 40 видно, что перемещения пешехода и конькобежца одинаковы. Модуль перемещения:

Путь конькобежца: 
Путь пешехода: 
Ответ: 
- Заказать решение задач по физике
Траектория движения
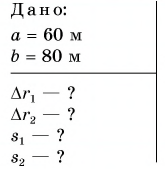
Возьмите лист бумаги и карандаш. Поставьте на листе точки А и В и соедините их кривой линией (рис. 7.1). Эта линия совпадает с траекторией движения кончика карандаша, то есть линией, в каждой точке которой последовательно побывал кончик карандаша во время своего движения.
Траектория движения — это воображаемая линия, которую описывает в пространстве движущаяся точка. Обычно мы не видим траектории движения тел, но иногда бывают исключения.
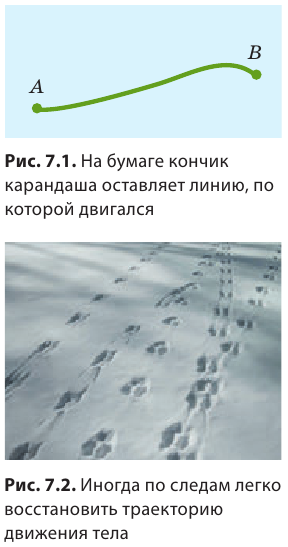
Так, в безоблачную погоду высоко в небе можно увидеть белый след, который во время своего движения оставляет самолет*. По этому следу можно определить траекторию движения самолета. Траектории движения каких тел можно восстановить по следам, изображенным на рис. 7.2? В каких случаях траекторию движения «заготавливают» заранее? Форма траектории может быть разной: прямая, окружность, дуга, ломаная и т. д. В зависимости от формы траектории различают прямолинейное и криволинейное движения тел (рис. 7.3).
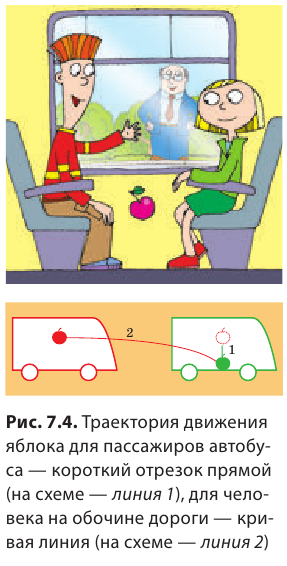
Форма траектории движения тела зависит от того, относительно какой системы отсчета рассматривают движение. Приведем пример. У мальчика, едущего в автобусе, упало из рук яблоко (рис. 7.4). Для девочки, сидящей напротив, траектория движения яблока — короткий отрезок прямой. В этом случае система отсчета, относительно которой рассматривается движение яблока, связана с салоном автобуса. Но все время, пока яблоко падало, оно «ехало» вместе с автобусом, поэтому для человека, стоящего на обочине дороги, траектория движения яблока абсолютно другая. Система отсчета в таком случае связана с дорогой.
Чем путь отличается от перемещения
Вернемся к началу (см. рис. 7.1). Чтобы найти путь, который прошел конец карандаша, рисуя кривую линию, необходимо измерить длину этой линии, то есть найти длину траектории (рис. 7.5). Путь — это физическая величина, равная длине траектории. Путь обозначают символом l. Единица пути в СИ — метр: [l]= м. Используют также дольные и кратные единицы пути, например миллиметр (мм), сантиметр (см), километр (км):

Путь, пройденный телом, будет разным относительно разных систем отсчета. Вспомним яблоко в автобусе (см. рис. 7.4): для пассажиров яблоко прошло путь около полуметра, а для человека на обочине дороги — несколько метров. Вернемся к рис. 7.1. Соединив точки А и В отрезком прямой со стрелкой, получим направленный отрезок, который покажет, в каком направлении и на какое расстояние переместился конец карандаша (рис. 7.6).
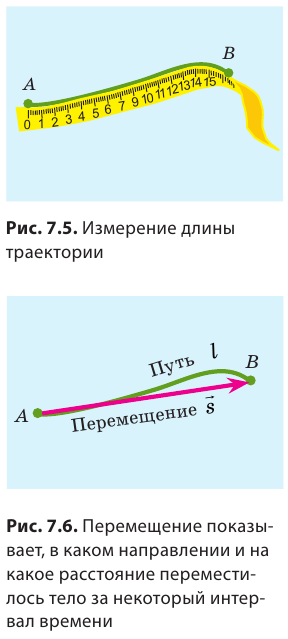
Направленный отрезок прямой, соединяющий начальное и конечное положения тела, называют перемещением. Перемещение обозначают символом  . Стрелка над символом показывает, что перемещение — это векторная физическая величина*. Чтобы правильно задать перемещение, необходимо указать не только его значение (модуль), но и направление.
. Стрелка над символом показывает, что перемещение — это векторная физическая величина*. Чтобы правильно задать перемещение, необходимо указать не только его значение (модуль), но и направление.
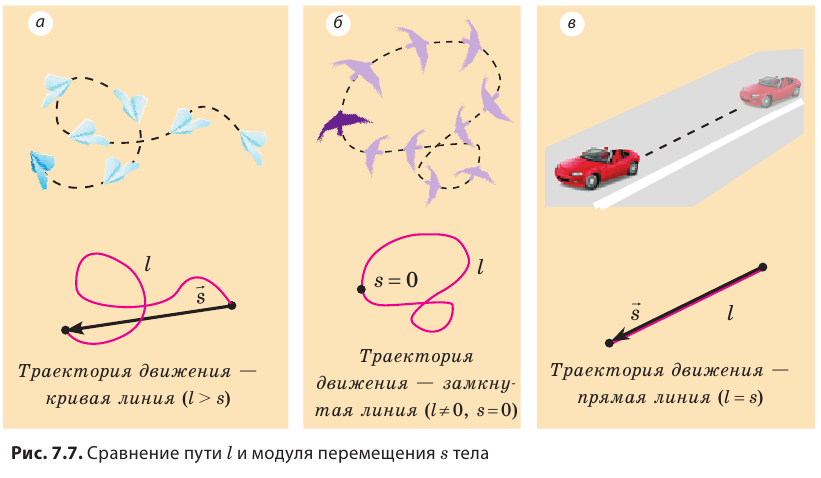
Модуль перемещения, то есть расстояние, на которое переместилось тело в определенном направлении, также обозначают символом s, но без стрелки. Единица перемещения в СИ такая же, как и единица пути, — метр: [s]= м. В общем случае перемещение не совпадает с траекторией движения тела (рис. 7.7, а, б), поэтому путь, пройденный телом, обычно больше модуля перемещения. Путь и модуль перемещения равны только в том случае, когда тело движется вдоль прямой в неизменном направлении (рис. 7.7, в).
Итоги:
Воображаемая линия, которую описывает в пространстве движущаяся точка, называется траекторией. В зависимости от формы траектории различают прямолинейное и криволинейное движения тел. Путь l — это физическая величина, равная длине траектории. Перемещение  — это направленный отрезок прямой, соединяющий начальное и конечное положения тела. Единица пути и перемещения в СИ — метр (м).
— это направленный отрезок прямой, соединяющий начальное и конечное положения тела. Единица пути и перемещения в СИ — метр (м).
Физические величины, имеющие значение и направление, называется векторными а имеющие только значение — скалярными.
- Равномерное прямолинейное движение
- Прямолинейное неравномерное движение
- Прямолинейное равноускоренное движение
- Сложение скоростей
- Физический и математический маятники
- Пружинные и математические маятники
- Скалярные и векторные величины и действия над ними
- Проекция вектора на ось
С понятием пути вы уже неоднократно сталкивались. Познакомимся теперь с новым для вас понятием – перемещением, которое более информативно и полезно в физике, чем понятие пути.
.")
Допустим, из пункта А в пункт В на другом берегу реки нужно переправить груз. Это можно сделать на автомобиле через мост, на катере по реке или на вертолёте. В каждом из этих случаев путь, пройденный грузом, будет разным, но перемещение будет неизменным: из точки А в точку В.
Перемещением называют вектор, проведённый из начального положения тела в его конечное положение. Вектор перемещения показывает расстояние, на которое переместилось тело, и направление перемещения. Обратите внимание, что направление перемещения и направление движения – два разных понятия. Поясним это.

Рассмотрим, например, траекторию движения автомобиля от пункта А до середины моста. Обозначим промежуточные точки – В1, В2, В3 (см. рисунок). Вы видите, что на отрезке АВ1 автомобиль ехал на северо-восток (первая синяя стрелка), на отрезке В1В2 – на юго-восток (вторая синяя стрелка), а на отрезке В2В3 – на север (третья синяя стрелка). Итак, в момент проезда моста (точки В3) направление движения характеризовалось синим вектором В2В3, а направление перемещения – красным вектором АВ3.
Итак, перемещение тела – векторная величина, то есть имеющая пространственное направление и числовое значение (модуль). В отличие от перемещения, путь – скалярная величина, то есть имеющая только числовое значение (и не имеющая пространственного направления). Путь обозначают символом l, перемещение обозначают символом  (важно: со стрелочкой). Символом s без стрелочки обозначают модуль перемещения. Примечание: изображение любого вектора на чертеже (в виде стрелки) или упоминание его в тексте (в виде слова) делает необязательным наличие стрелочки над обозначением.
(важно: со стрелочкой). Символом s без стрелочки обозначают модуль перемещения. Примечание: изображение любого вектора на чертеже (в виде стрелки) или упоминание его в тексте (в виде слова) делает необязательным наличие стрелочки над обозначением.
Почему в физике не ограничились понятием пути, а ввели более сложное (векторное) понятие перемещения? Зная модуль и направление перемещения, всегда можно сказать, где будет находиться тело (по отношению к своему начальному положению). Зная путь, положение тела определить нельзя. Например, зная лишь, что турист прошёл путь 7 км, мы ничего не можем сказать о том, где он сейчас находится.
Задача. В походе по равнине турист прошёл на север 3 км, затем повернул на восток и прошел ещё 4 км. На каком расстоянии от начальной точки маршрута он оказался? Начертите его перемещение.
Решение 1 – с измерениями линейкой и транспортиром.

Перемещение – это вектор, соединяющий начальное и конечное положения тела. Начертим его на клетчатой бумаге в масштабе: 1 км – 1 см (чертёж справа). Измерив линейкой модуль построенного вектора, получим: 5 см. Согласно выбранному нами масштабу, модуль перемещения туриста равен 5 км. Но напомним: знать вектор – значит знать его модуль и направление. Поэтому, применив транспортир, определим: направление перемещения туриста составляет 53° с направлением на север (проверьте сами).
Решение 2 – без использования линейки и транспортира.
Поскольку угол между перемещениями туриста на север и на восток составляет 90°, применим теорему Пифагора и найдём длину гипотенузы, так как она одновременно является и модулем перемещения туриста:

Как видите, это значение совпадает с полученным в первом решении. Теперь определим угол α между перемещением (гипотенузой) и направлением на север (прилежащим катетом треугольника):

Итак, задача решена двумя способами с совпадающими ответами.
Кинематика — это специальный раздел теоретической механики. Направление сформировалось несколько позднее, чем статика и динамика: во второй половине XIX столетия. Первые исследования в области кинематики были посвящены огнестрельному оружию. Ученые стремились понять процесс полета снаряда, производили расчет траектории его движения. В дальнейшем кинематика как научное направление получило широкое распространение и существенно повлияло на развитие технического прогресса.
Кинематика — описание
Кинематика является разделом механики, цель которого — изучение механического движения тел с пренебрежением к причинам, вызывающим это движение.
Механика представляет собой научную область физики, которой посвящены исследования механического движения тел. Основной целью данного направления служит определение точного положения тела в пространстве в любой момент времени. Важным понятием этого раздела является материальная точка в виде тела с определенной массой и размерами, которыми можно пренебречь для решения задачи при наличии следующих условий:
- Путь, который преодолевает тело, существенно больше, чем его размеры.
- Расстояние между телами значительно превышает их размеры.
- Объект совершает поступательное движение.
Движение тела рассматривают в системе отсчета, состоящей из системы координат и прибора, измеряющего время. Траекторией называют линию, которую объект описывает, совершая движение. Путь является скалярной величиной, определяемой как длина траектории. Перемещением обозначают вектор, который соединяет начальное и конечное положение тела, преодолеваемое им в течение определенного промежутка времени.
Совершая движение, тело может только увеличивать пройденный путь, при этом перемещение увеличивается или уменьшается. К примеру, уменьшение перемещения наблюдается во время обратного движения тела. Если объект движется прямолинейно в одном направлении, то путь определяется модулем перемещения. В случае криволинейного движения — путь превышает перемещение. При рассмотрении замкнутой траектории перемещение будет равно нулю.
Теория и формулы
Благодаря многолетним исследованиям в области кинематики ученым удалось вывести определенные закономерности движения тела. С помощью справедливых уравнений представляется возможным ответить на многие вопросы о разных характеристиках, которые изменяются либо остаются постоянными во время движения объектов.
Путь, время, скорость
Расстояние представляет собой удаленность одной точки положения тела от другой. Тело преодолевает путь, который представляет собой важную характеристику механического движения. Общепринятым обозначением пути является латинская буква s. Данный параметр измеряют метрами и километрами, если речь идет о больших расстояниях.
Скорость представляет собой путь, который тело преодолело в течение единицы времени. В качестве единицы времени часто используют 1 час, 1 минуту, 1 секунду. Для расчета скорости необходимо определить отношение пути к времени движения. В случае, когда в условиях задачи расстояние измеряется в метрах, а время пути — в секундах, то скорость следует рассчитывать в метрах в секунду (м/с). Для обозначения скорости используют латинскую букву (v).
Нередко требуется определить время пути. Данный параметр обозначают с помощью латинской буквы (t).
Важно отметить, что скорость, путь и время взаимосвязаны. При известных характеристиках скорости и времени можно определить расстояние, которое преодолело тело. Путь в данном случае равен произведению скорости и времени, рассчитывается по формуле:
(s=vtimes t)
При известных величинах времени и расстояния достаточно просто определить скорость движения тела, руководствуясь следующим уравнением:
(v=frac{s}{t})
Равномерное движение
Равномерным движением называют движение тела, которое совершает равные перемещения в течение любых равных промежутков времени.
Скорость при равномерном движении определяется как отношение перемещения ко времени, в течение которого данное перемещение было совершено. Уравнение имеет следующий вид:
(vec{v}=frac{vec{s}}{t})
(vec{v}=const)
Проекция вектора скорости на ось ОХ выглядит таким образом:
(v_{x}=frac{s_{x}}{t})
(v_{x}=const)
Если вектор скорости спроецировать на ось координат, то она будет равна быстроте изменения данной координаты:
(v_{x}=frac{x-x_{0}}{t})
Прямолинейное равноускоренное движение
Прямолинейным равноускоренным движением называют движение по прямой траектории, для которого характерно постоянное ускорение.
Ускорение для прямолинейного равноускоренного движения обозначают следующим образом:
(vec{a}=const)
При таком движении можно наблюдать увеличение или уменьшение скорости. Чтобы определить скорость, необходимо выполнить следующий расчет:
(vec{v}=vec{v}_{0}+vec{a}t)
Если тело разгоняется в проекции оси ОХ, то скорость можно определить по формуле:
(v_{x}=v_{0x}+a_{x}t)
a>0, движение является равноускоренным.
Во время торможения в проекции на ось ОХ скорость рассчитывают следующим образом:
(v_{x}=v_{0x}-a_{x}t)
а<0, движение является равнозамедленным.
Графически зависимость ускорения от времени, то есть график ускорения во время равноускоренного движения тела, можно представить в виде:
График ускорения, характеризующий равноускоренное движение тела, представляет собой прямую, которая параллельна оси времени:
- график 1 находится над осью t, тело совершает разгон, ах>0;
- график 2 размещен под осью t, тело тормозит, ах<0.
Графически скорость или проекция скорости изображается в виде зависимости скорости от времени:
Графически скорость, характерная для равноускоренного движения тела, имеет вид прямой. График 1 направлен вверх, тело будет совершать равноускоренное движение в положительном направлении оси ОХ:
(v_{0x}>0)
(a_x>0)
(a_{1x} = tg α )
График 2 направлен вниз, тело будет двигаться равнозамедленно в положительном направлении оси ОХ:
(v_{0x}>0)
(a_x<0)
(a_{2x} = tg α )
График 3 направлен вниз, тело свершает равноускоренное движение против оси ОХ:
(v_{0x}<0)
(a_x<0)
Исходя из графика зависимости скорости от времени, определяют перемещение, которое тело преодолело в течение определенного промежутка времени (t_2-t_1). В этом случае целесообразно рассчитать площадь фигуры, расположенной под графиком. Формула для определения перемещения при равноускоренном движении имеет вид:
(S_{x}=v_{0x}t+frac{a_{x}t^{2}}{2})
(S_{x}=frac{v^{2}-v_{0}^{2}}{2a})
Перемещение в n-ую секунду во время равноускоренного движения можно определить по формуле:
(S_{n}=frac{a}{2}left(2n-1 right))
Определить координату тела, которое совершает равноускоренное движение, можно с помощью справедливого уравнения:
(x=x_{0}+v_{0x}t+frac{a_{x}t^{2}}{2})
Движение тела, брошенного вертикально вверх (вниз)
Во время падения тела вниз вектор его скорости направлен в ту же сторону, что и вектор ускорения свободного падения.
Формулы, описывающее это движения, имеют следующий вид:
(vec{v} ↑↑vec{g})
(h=v_{0}t+frac{gt^{2}}{2})
(v=v_{0}+gt)
(h=frac{v^{2}-v_{0}^{2}}{2g})
В случае, когда тело падает вниз и его начальная скорость равна нулю, (v_0=0). Время падения при этом можно рассчитать по формуле:
(t=sqrt{frac{2h_{0}}{g}})
(h) является начальной высотой.
Для брошенного вверх тела будут справедливы следующие равенства:
(h=v_{0}t-frac{gt^{2}}{2})
(v=v_{0}-gt)
(h=frac{v^{2}-v_{0}^{2}}{-2g})
В максимальной верхней точке тело, брошенное вверх, будет обладать нулевой скоростью, (v=0). Для расчета времени подъема можно воспользоваться формулой:
(t=frac{v_{0}}{g})
Свободно падающее тело
Свободным падением называют движение тела в условиях безвоздушного пространства под действием силы тяжести.
В условиях свободного падения ускорения тел с разной массой будут равны. Данный параметр называют ускорением свободного падения. Оно всегда направлено к центру нашей планеты, то есть вертикально вниз. Величина обозначается латинской буквой g, а единицами измерения являются м/с2.
Ускорение свободного падения равно 9,8 м/с2. В задачах по физике допускается использовать значение g=10 м/с2.
Движение по окружности с постоянной по модулю скоростью
Движением по окружности при постоянной по модулю скоростью называют простейшим видом криволинейного движения.
Траектория такого движения будет представлена в виде окружности. Вектор скорости тела приобретает направление по касательной к окружности. Модуль скорости тела при изменении времени остается постоянным, а направление движения в каждой точке изменяется. Из этого можно сделать вывод, что движение по окружности представляет собой движение с ускорением. В свою очередь ускорение, изменяющее направление скорости, носит название центростремительного.
Центростремительное ускорение направлено по радиусу окружности к ее центру.
Центростремительное ускорение является характеристикой быстроты изменения направления вектора линейной скорости. Параметр обозначается, как ацс. Единицами измерения центростремительного ускорения служат м/с2. Формула для расчета следующая:
(а_{цс} = frac{v^{2}}{R})
Движение тела по окружности при постоянной по модулю скорости называют периодическим движением. Таким образом, его координата будет повторяться через одинаковые периоды времени. Периодом называют время, в течение которого тело совершает один полный оборот. Обозначается величина как Т. Единицами измерения периода являются секунды, с. Для расчета справедливо равенство:
(T=frac{t}{N})
(N) является количеством оборотов, (t) — временем, за которое тело совершает обороты.
Частота вращения представляет собой количество оборотов за единицу времени. Обозначается параметр в виде латинской буквы (ν). Единицами измерения являются (с^{-1}) (Гц).
(nu=frac{N}{t})
Период и частота являются взаимно обратными величинами:
(T=frac{1}{nu})
(nu =frac{1}{T})
Линейная скорость представляет собой скорость движения тела по окружности. Параметр обозначают латинской буквой v, единицами измерения являются м/с. Линейная скорость направлена по касательной к окружности и рассчитывается по формуле:
(v=frac{2pi times R}{T})
(R) является радиусом окружности.
Угловой скоростью называют физическую величину, которая определяется как отношение угла поворота и времени, за которое тело совершает этот поворот. Обозначают параметр как ω. Единицами измерения угловой скорости являются рад/с. Угловая скорость определяется по формуле:
(omega =frac{varphi }{t})
(varphi) представляет собой угол поворота.
Направление угловой скорости определяют с помощью правила правого винта или буравчика. В случае, когда вращательное движение винта соотносится с направлением движения тела по окружности, то поступательное движение винта и направление угловой скорости совпадают. Связь параметров движения тела по окружности представлена следующими формулами:
(v=omega R)
(omega =frac{v}{R})
(a_{сц} = omega ^{2}R)
(omega = frac{2pi }{T})
(omega = 2pi v)
Во время равномерного движения тела по окружности точки, расположенные на радиусе, перемещаются с равной угловой скоростью, так как радиус за одно и то же время поворачивается на одинаковый угол. В это время линейная скорость разных точек радиуса отличается в зависимости от того, насколько близко или далеко от центра они размещены:
(v_{1}=omega r)
(v_{2}=omega R)
(frac{v_{1}}{v_{2}}=frac{r}{R})
При рассмотрении равномерного движения двух соединенных тел можно наблюдать отсутствие отличий в линейных скоростях, но при этом угловые скорости тел будут различны в зависимости от радиуса тела:
(omega _{1}=frac{v}{R_{1}})
(omega _{2}=frac{v}{R_{2}})
(frac{omega _{1}}{omega _{2}}=frac{R_{1}}{R_{2}})
Движение тела, брошенного под углом к горизонту
Движение тела, которое бросили под углом к горизонту, можно представить в виде суперпозиции двух движений:
- Равномерного горизонтального перемещения.
- Равноускоренного движения вертикально при ускорении свободного падения.
Формула скорости будет иметь следующий вид:
(v_{0x}=v_{x}=v_{0} cos alpha =const)
(v_{0y}=v_{0}sin alpha)
(v_{y}=v_{0}sin alpha-gt)
Уравнение координаты обладает следующим видом:
(x=v_{0}cos alpha times t)
(y=v_{0}sin alpha times t-frac{gt^{2}}{2})
Скорость тела в любое время будет равна:
(v=sqrt{v_{x}^{2}+v_{y}^{2}})
Найти угол между вектором скорости и осью ОХ можно по формуле:
(tan beta =frac{v_{y}}{v_{x}}=frac{v_{0}sin alpha -gt}{v_{0}cos alpha })
Время подъема на максимальную высоту равно:
(t=frac{v_{0}sin alpha }{g})
Максимальную высоту подъема можно рассчитать с помощью формулы:
(h_{max}=frac{v_{0}^{2}sin ^{2}alpha}{2g})
Время полета соответствует уравнению:
(t=frac{2v_{0}sin alpha }{g})
Максимальную дальность полета можно рассчитать по формуле:
(L_{max}=frac{v_{0}^{2}sin 2alpha }{g})
Движение тела, брошенного горизонтально
Движение тела, которое бросили горизонтально, представлено в виде суперпозиции двух движений:
- Равномерное горизонтальное движение со скоростью v0=v0x.
- Равноускоренное вертикальное движение при ускорении свободного падения g с нулевой начальной скоростью.
Уравнение скорости:
(v_{x}=v_{0x}=const)
(v_{y}=g_{y}t=-gt)
Уравнение координаты:
(x=v_{0x}t=v_{x}t)
(y=frac{g_{y}t^{2}}{2}=h_{0}-frac{gt^{2}}{2})
Скорость тела в любое время будет определяться по формуле:
(v=sqrt{v_{x}^{2}+v_{y}^{2}})
Дальность полета тела соответствует уравнению:
(l=v_{0x}t=v_{0x}sqrt{frac{2h_{0}}{g}})
Вычислить угол между вектором скорости и осью ОХ можно с помощью формулы:
(tan beta =frac{v_{y}}{v_{x}}=frac{-gt}{v_{0x}})
Задачи по кинематике, их решение
Задача 1
Рассмотрим путь велосипедиста из одного населенного пункта в другой. Половина расстояния была преодолена со скоростью 12 км/ч ((v_1)). Далее половину оставшегося времени он ехал со скоростью 6 км/ч ((v_2)). Остаток расстояния путник преодолел пешком со скоростью 4км/ч ((v_3)). Необходимо рассчитать среднюю скорость на всем пути следования велосипедиста.
Решение
Данный пример относится к теме равномерного прямолинейного движения одного тела. Процесс можно изобразить схематично:
(S = S_1 + S_2 + S_3)
(t = t_1 + t_2 + t_3)
На каждый отрезок пути необходимо составить уравнение движения:
(S_1 = v_1t_1)
(S_2 = v_2t_2)
(S_3 = v_3t_3)
Далее можно представить дополнительные условия задачи:
(S_1 = S_2 + S_3)
(t_2 = t_3)
(v_{sr}=frac{S}{t}=frac{S_{1}+S_{2}+S_{3}}{t_{1}+t_{2}+t_{3}})
Следует преобразить формулу и подставить числовые значения:
(v_{sr}=frac{2S_{1}}{frac{S_{1}}{v_{1}}+frac{2S_{1}}{v_{2}+v_{3}}}=frac{2v_{1}left(v_{2}+v_{3} right)}{2v_{1}+v_{2}+v_{3}})
(v_{sr}=frac{2times 12left(6+4 right)}{2times 12+6+4}=7)
Ответ: средняя скорость составляет (7) км/ч.
Задача 2
Тело подбросили вертикально вверх. Начальная скорость при этом составила 3,13 м/с ((v_0)). В момент, когда данное тело достигло максимальную высоту полета, из начального пункта подбросили второе тело с такой же начальной скоростью, как у первого. Необходимо определить на каком расстоянии от точки бросания встретятся тела. Сопротивлением воздуха при решении можно не учитывать.
Решение
Схематично перемещение тел можно представить следующим образом:
Формула, описывающая движение тела, которое подбросили вверх, необходима для вычисления координаты движущегося тела в любое время. Для первого тела справедливо уравнение:
(h=v_{0}t_{1}-frac{gt_{1}^{2}}{2})
Для второго тела можно представить следующую формулу:
(h=v_{0}t_{2}-frac{gt_{2}^{2}}{2})
Следующую формулу можно составить на основании условия задачи, в котором указано, что второе тело бросили позднее первого на время максимального подъема:
(t_{1}-t_{2}=frac{v_{0}}{g})
Объединяя уравнения в систему из трех формул относительно величины (h) получим:
(h=frac{3}{4}frac{v_{0}^{2}}{2g})
(h=frac{3}{4}frac{3.13^{2}}{2*9.8}=0.37)
Ответ: тела встретятся на высоте (0,37) м.
Задача 3
Камень, находясь в свободном падении, вторую часть пути преодолел за 1 секунду. Необходимо вычислить высоту (h), с которой упал камень.
Решение
Ось Y системы координат, в которых падает камень, направлена вертикально вниз. В качестве начала координат можно принять точку, из которой камень упал. Закон перемещения данного тела в проекции на ось будет обладать следующим видом:
(h=v_{0}t+frac{gt^{2}}{2})
(h=frac{gt^{2}}{2})
(v=v_{0}t+gt)
(v=gt)
Время падения камня рассчитывается по формуле:
(t=sqrt{frac{2h}{g}})
Для середины пути, который преодолел камень, справедливы уравнения:
(frac{h}{2}=frac{gt_{1}^{2}}{2})
(t_{1}=sqrt{frac{h}{g}})
Время (t_2), которое потребовалось телу на преодоление второй половины пути, указанное в условии задачи, рассчитывается по формуле:
(t_{2}=t-t_{1}=sqrt{frac{2h}{g}}-sqrt{frac{h}{g}})
(t_{2}^{2}=frac{h}{g}left(sqrt{2} -1right)^{2})
Исходя из данного уравнения, можно вычислить высоту:
(t_{2}^{2}=frac{h}{g}left(sqrt{2} -1right)^{2})
(h=frac{t_{2}^{2}g}{left(sqrt{2}-1 right)^{2}}=frac{9,81}{0,17}=57,7)
Ответ: камень упал с высоты (57,7) м.
Решение задач по кинематике основано на простых формулах. Успешность результата зависит от умения грамотно применять справедливые уравнения в том или ином случае. Бывают ситуации, когда в процессе изучения физики возникают некоторые трудности. Простым решением будет обратиться к порталу Феникс.Хелп.
Механическое движение.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ: механическое движение и его виды, относительность механического движения, скорость, ускорение.
Понятие движения является чрезвычайно общим и охватывает самый широкий круг явлений. В физике изучают различные виды движения. Простейшим из них является механическое движение. Оно изучается в механике.
Механическое движение — это изменение положение тела (или его частей) в пространстве относительно других тел с течением времени.
Если тело A меняет своё положение относительно тела B, то и тело B меняет своё положение относительно тела A. Иначе говоря, если тело A движется относительно тела B, то и тело B движется относительно тела A. Механическое движение является относительным — для описания движения необходимо указать, относительно какого тела оно рассматривается.
Так, например, можно говорить о движении поезда относительно земли, пассажира относительно поезда, мухи относительно пассажира и т. д. Понятия абсолютного движения и абсолютного покоя не имеют смысла: пассажир, покоящийся относительно поезда, будет двигаться с ним относительно столба на дороге, совершать вместе с Землёй суточное вращение и двигаться вокруг Солнца.
Тело, относительно которого рассматривается движение, называется телом отсчёта.
Основной задачей механики является определение положения движущегося тела в любой момент времени. Для решения этой задачи удобно представить движение тела как изменение координат его точек с течением времени. Чтобы измерить координаты, нужна система координат. Чтобы измерять время, нужны часы. Всё это вместе образует систему отсчёта.
Система отсчёта — это тело отсчёта вместе с жёстко связанной с ним («вмороженной»» в него) системой координат и часами.
Система отсчёта показана на рис. 1. Движение точки  рассматривается в системе координат
рассматривается в системе координат  . Начало координат
. Начало координат  является телом отсчёта.
является телом отсчёта.
 |
| Рисунок 1. |
Вектор  называется радиус-вектором точки . Координаты
называется радиус-вектором точки . Координаты  точки являются в то же время координатами её радиус-вектора
точки являются в то же время координатами её радиус-вектора  .
.
Решение основной задачи механики для точки состоит в нахождении её координат как функций времени: , y = y(t), z = z(t)") .
.
В ряде случаев можно отвлечься от формы и размеров изучаемого объекта и рассматривать его просто как движущуюся точку.
Материальная точка — это тело, размерами которого можно пренебречь в условиях данной задачи.
Так, поезд можно считать материальной точкой при его движении из Москвы в Саратов, но не при посадке в него пассажиров. Землю можно считать материальной точкой при описании её движения вокруг Солнца, но не её суточного вращения вокруг собственной оси.
К характеристикам механического движения относятся траектория, путь, перемещение, скoрость и ускорение.
Траектория, путь, перемещение.
В дальнейшем, говоря о движущемся (или покоящемся) теле, мы всегда полагаем, что тело можно принять за материальную точку. Случаи, когда идеализацией материальной точки пользоваться нельзя, будут специально оговариваться.
Траектория — это линия, вдоль которой движется тело. На рис. 1 траекторией точки является синяя дуга, которую описывает в пространстве конец радиус-вектора .
Путь — это длина участка траектории, пройденного телом за данный промежуток времени.
Перемещение — это вектор, соединяющий начальное и конечное положение тела.
Предположим, что тело начало движение в точке  и закончило движение в точке
и закончило движение в точке  (рис. 2). Тогда путь, пройденный телом, это длина траектории
(рис. 2). Тогда путь, пройденный телом, это длина траектории  . Перемещение тела — это вектор
. Перемещение тела — это вектор  .
.
 |
| Рисунок 2. |
Скорость и ускорение.
Рассмотрим движение тела в прямоугольной системе координат с базисом  (рис. 3).
(рис. 3).
 |
| Рисунок 3. |
Пусть в момент времени  тело находилось в точке
тело находилось в точке ") с радиус-вектором
с радиус-вектором

Спустя малый промежуток времени  тело оказалось в точке
тело оказалось в точке ") с
с
радиус-вектором
vec{i}+(y+Delta y)vec{j}+(z+Delta z)vec{k}")
Перемещение тела:
vec{i}+(Delta y)vec{j}+(Delta z)vec{k}") (1)
(1)
Мгновенная скорость  в момент времени — это предел отношения перемещения
в момент времени — это предел отношения перемещения  к интервалу времени , когда величина этого интервала стремится к нулю; иными словами, скорость точки — это производная её радиус-вектора:
к интервалу времени , когда величина этого интервала стремится к нулю; иными словами, скорость точки — это производная её радиус-вектора:
 (2)
(2)
Из (2) и (1) получаем:
")
Коэффициенты при базисных векторах в пределе дают производные:

(Производная по времени традиционно обозначается точкой над буквой.) Итак,

Мы видим, что проекции вектора скорости на координатные оси являются производными координат точки:

Когда стремится к нулю, точка  приближается к точке и вектор перемещения разворачивается в направлении касательной. Оказывается, что в пределе вектор
приближается к точке и вектор перемещения разворачивается в направлении касательной. Оказывается, что в пределе вектор  направлен точно по касательной к траектории в точке . Это и показано на рис. 3.
направлен точно по касательной к траектории в точке . Это и показано на рис. 3.
Понятие ускорения вводится похожит образом. Пусть в момент времени скорость тела равна  , а спустя малый интервал скорость стала равна
, а спустя малый интервал скорость стала равна  .
.
Ускорение  — это предел отношения изменения скорости к интервалу
— это предел отношения изменения скорости к интервалу  , когда этот интервал стремится к нулю; иначе говоря, ускорение — это производная скорости:
, когда этот интервал стремится к нулю; иначе говоря, ускорение — это производная скорости:

Ускорение, таким образом, есть «cкорость изменения скорости». Имеем:
=dot{displaystyle v_{displaystyle x}}vec{displaystyle i}+dot{displaystyle v_{displaystyle y}}vec{displaystyle j}+dot{v_{displaystyle z}}vec{displaystyle k}.")
Следовательно, проекции ускорения являются производными проекций скорости (и, стало быть, вторыми производными координат):

Закон сложения скоростей.
Пусть имеются две системы отсчёта. Одна из них связана с неподвижным телом отсчёта . Эту систему отсчёта обозначим  и будем называть неподвижной.
и будем называть неподвижной.
Вторая система отсчёта, обозначаемая  , связана с телом отсчёта
, связана с телом отсчёта  , которое движется относительно тела со скоростью
, которое движется относительно тела со скоростью  . Эту систему отсчёта называем движущейся. Дополнительно предполагаем, что координатные оси системы перемещаются параллельно самим себе (нет вращения системы координат), так что вектор можно считать скоростью движущейся системы относительно неподвижной.
. Эту систему отсчёта называем движущейся. Дополнительно предполагаем, что координатные оси системы перемещаются параллельно самим себе (нет вращения системы координат), так что вектор можно считать скоростью движущейся системы относительно неподвижной.
Неподвижная система отсчёта обычно связана с землёй. Если поезд плавно едет по рельсам со скоростью , это система отсчёта, связанная с вагоном поезда, будет движущейся системой отсчёта .
Заметим, что скорость любой точки вагона (кроме вращающихся колёс!) равна . Если муха неподвижно сидит в некоторой точке вагона, то относительно земли муха движется со скоростью . Муха переносится вагоном, и потому скорость движущейся системы относительно неподвижной называется переносной скоростью.
Предположим теперь, что муха поползла по вагону. Скорость мухи относительно вагона (то есть в движущейся системе ) обозначается  и называется относительной скоростью. Скорость мухи относительно земли (то есть в неподвижной системе ) обозначается и называется абсолютной скоростью.
и называется относительной скоростью. Скорость мухи относительно земли (то есть в неподвижной системе ) обозначается и называется абсолютной скоростью.
Выясним, как связаны друг с другом эти три скорости — абсолютная, относительная и переносная.
На рис. 4 муха обозначена точкой .Далее:
 — радиус-вектор точки в неподвижной системе ;
— радиус-вектор точки в неподвижной системе ;
 — радиус-вектор точки в движущейся системе ;
— радиус-вектор точки в движущейся системе ;
 — радиус-вектор тела отсчёта в неподвижной системе .
— радиус-вектор тела отсчёта в неподвижной системе .
 |
| Рисунок 4. |
Как видно из рисунка,

Дифференцируя это равенство, получим:
 (3)
(3)
(производная суммы равна сумме производных не только для случая скалярных функций, но и для векторов тоже).
Производная  есть скорость точки в системе , то есть абсолютная скорость:
есть скорость точки в системе , то есть абсолютная скорость:
 .
.
Аналогично, производная  есть скорость точки в системе , то есть относительная скорость:
есть скорость точки в системе , то есть относительная скорость:

А что такое  ? Это скорость точки в неподвижной системе, то есть — переносная скорость движущейся системы относительно неподвижной:
? Это скорость точки в неподвижной системе, то есть — переносная скорость движущейся системы относительно неподвижной:

В результате из (3) получаем:

Закон сложения скоростей. Скорость точки относительно неподвижной системы отсчёта равна векторной сумме скорости движущейся системы и скорости точки относительно движущейся системы. Иными словами, абсолютная скорость есть сумма переносной и относительной скоростей.
Таким образом, если муха ползёт по движущемуся вагону, то скорость мухи относительно земли равна векторной сумме скорости вагона и скорости мухи относительно вагона. Интуитивно очевидный результат!
Виды механического движения.
Простейшими видами механического движения материальной точки являются равномерное и прямолинейное движения.
Движение называется равномерным, если модуль вектора скорости остаётся постоянным (направление скорости при этом может меняться).
Движение называется прямолинейным, если направление вектора скорости остаётся постоянным (а величина скорости при этом может меняться). Траекторией прямолинейного движения служит прямая линия, на которой лежит вектор скорости.
Например, автомобиль, который едет с постоянной скоростью по извилистой дороге, совершает равномерное (но не прямолинейное) движение. Автомобиль, разгоняющийся на прямом участке шоссе, совершает прямолинейное (но не равномерное) движение.
А вот если при движении тела остаются постоянными как модуль скорости, так и его направление, то движение называется равномерным прямолинейным.
В терминах вектора скорости можно дать более короткие определения данным типам движения:
Важнейшим частным случаем неравномерного движения является равноускоренное движение, при котором остаются постоянными модуль и направление вектора ускорения:
- равноускоренное движение


Наряду с материальной точкой в механике рассматривается ещё одна идеализация — твёрдое тело.
Твёрдое тело — это система материальных точек, расстояния между которыми не меняются со временем. Модель твёрдого тела применяется в тех случаях, когда мы не можем пренебречь размерами тела, но можем не принимать во внимание изменение размеров и формы тела в процессе движения.
Простейшими видами механического движения твёрдого тела являются поступательное и вращательное движения.
Движение тела называется поступательным, если всякая прямая, соединяющая две какие-либо точки тела, перемещается параллельно своему первоначальному направлению. При поступательном движении траектории всех точек тела идентичны: они получаются друг из друга параллельным сдвигом (рис. 5).
 |
| Рисунок 5. |
Движение тела называется вращательным, если все его точки описывают окружности, лежащие в параллельных плоскостях. При этом центры данных окружностей лежат на одной прямой, которая перпендикулярна всем этим плоскостям и называется осью вращения.
На рис. 6 изображён шар, вращающийся вокруг вертикальной оси. Так обычно рисуют земной шар в соответствующих задачах динамики.
 |
| Рисунок 6. |
Если вам нравятся наши материалы — записывайтесь на курсы подготовки к ЕГЭ по физике онлайн
Благодарим за то, что пользуйтесь нашими публикациями.
Информация на странице «Механическое движение.» подготовлена нашими авторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать необходимые и поступить в высшее учебное заведение или техникум нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023