Построение плана
ускорений также начинаем со звена 1. В
общем случае ускорение точки А,
лежащей на кривошипе определяется из
векторного
уравнения:
![]()
где
![]() — нормальное (центростремительное)
— нормальное (центростремительное)
ускорение точкиА.
![]() —
—
тангенциальное ускорение точкиА.
Так как кривошип
вращается с постоянной угловой скоростью
(ω1=const),
то
![]() .Центростремительное
.Центростремительное
ускорение точки А
определим по формуле:
![]()
Построение плана
ускорений (рис.4) начинаем с ускорения
![]() ,
,
которое направлено по кривошипу к центру
его вращения О. Для этого из произвольной
точки Pa
проводим луч Paа
произвольной длины (не менее 100 мм) по
направлению действия
![]() .
.
Зная величину ускорения
![]()
и длину отрезка Paа
(мм), определяем масштабный коэффициент
плана ускорений
![]() :
:

Ускорение точки
В
в сложном движении шатуна определим в
соответствием с векторным уравнением:
![]()
(2)
В уравнении (2)
имеется 3 неизвестных по величине
параметра ![]() ,
,
при известном их направлении. Для
графического решения уравнения (2)
необходимо определить величину одного
из неизвестных параметров, в частности
величину нормального ускорения точки
В
относительно точки А:
![]()
Центростремительное
ускорение ![]()
направлено от точки В
к точке А,
как мгновенному центру вращения,
по шатуну
АВ.
Величину отрезка, изображающего ускорение
![]()
на плане ускорений определим из
соотношения:

Определив величину
ускорения ![]()
и отложив на чертеже отрезок аn
решаем уравнение (2) графически. Для
этого из точки Ра
(полюса плана
ускорений) проводим луч, параллельный
линии ОВ,
который соответствует направлению
вектора ускорения точки В,
до пересечения с направлением вектора
тангенциального ускорения ![]() ,
,
перпендикулярного шатуну АВ.
Полученная фигура
(план ускорений) является графическим
решением уравнения (2), поэтому направления
векторов на этой фигуре должны
соответствовать данному уравнению.
Величину искомых ускорений определяем
умножением соответствующих отрезков
из плана на Ка:
![]()
![]()
![]()
На плане ускорений,
так же как на плане скоростей, определяем
положение точек S2
и S4
в соответствии с теоремой подобия, после
чего находим величину ускорений центров
масс шатунов 2 и 4:
![]()
![]()
Для звеньев 4 и 5
искомые ускорения определяем аналогичным
образом в соответствии с уравнениями:
![]()
![]()

![]()
![]()
![]()
![]()
![]()
План ускорений
позволяет определить величину и
направление угловых ускорений шатунов.
Угловое ускорение шатуна 2:
![]()
угловое ускорение
шатуна 4:
![]()
Направление этих
ускорений определяется по направлению
тангенциальных ускорений, приложенных
в соответствующих точках по аналогии
с угловыми скоростями (см. рис.1 и рис.4).

Рис.4 План ускорений
Планы скоростей
и ускорений позволяют определить
характер движения звеньев механизма.
При одинаковом направлении скорости и
ускорения звенья движутся ускоренно,
при разном направлении — замедленно. В
случае ω ≠ 0 и ε = 0 – равномерно; случай
ω = 0 и ε ≠ 0 – указывает на то, что скорости
различных точек звена равны, например,
для звена 2 (VA
= VB),
т.е. звено движется поступательно.
В нашем случае:
звено 1 движется равномерно (по условию),
звено 2 — ускоренно, звено 3 — замедленно,
звено 4 — замедленно, звено 5 -ускоренно.
Отметим, что
кинематический анализ механизма для
полноты картины изменения параметров
целесообразно осуществлять за цикл,
который в данном механизме соответствует
полному обороту кривошипа.
В предположении,
что кинематические параметры механизма
не изменяются скачкообразно, их определяют
для восьми, двенадцати и более положений
кривошипа в зависимости от условий
поставленной задачи.
В этом случае план
механизма, планы скоростей и ускорений
строятся для каждого из этих положений.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
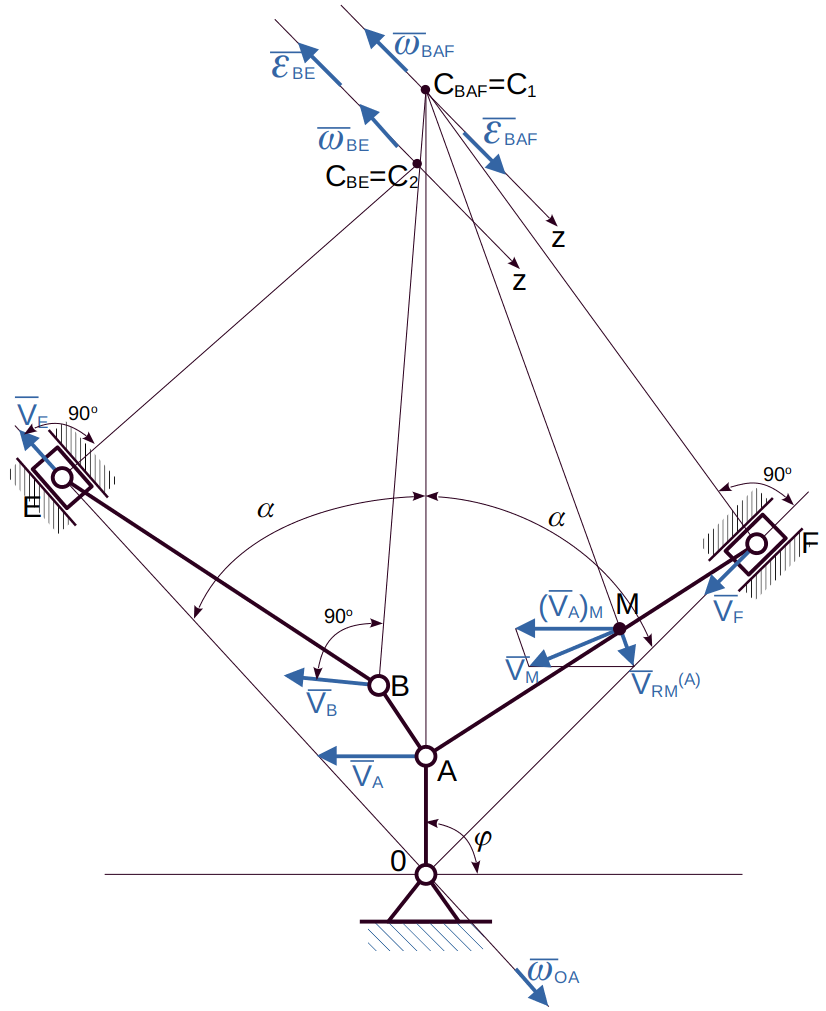
Рис.1
В положении механизма, указанном на рис.1, определить аналитически и построить на чертеже :
- положение мгновенных центров скоростей всех звеньев, совершающих плоское движение;
- скорости всех, точек механизма, расположенных в местах соединения звеньев (шарнирах);
- угловые скорости всех звеньев;
- ускорение точки А;
- ускорений других точек механизма методом полюса;
- угловые ускорения звеньев;
- касательное и нормальное ускорения точки В;
- установить характер движения точки В (ускоренное, замедленное, мгновенная остановка).
Дано:







 = 30 об./мин.
= 30 об./мин.
Определить:
1)  = ?
= ?
2)  = ?
= ?
3)  = ?
= ?
4)  = ?
= ?
Решение:
I. Определим скорости точек и угловые скорости звеньев механизма (метод мгновенного центра скоростей, мцс)
1.1 Определим угловую скорость ведущего кривошипа OA:

C1: вектор  оси
оси  — оси вращения кривошипа OA (см. рис.1),
— оси вращения кривошипа OA (см. рис.1), 
1.2 Рассмотрим кривошип OA:

C2:  в сторону вращения кривошипа OA (см. рис.1)
в сторону вращения кривошипа OA (см. рис.1)
1.3 рассмотрим уголковый шатун BAF
Точка  — мгновенный центр скоростей шатуна BAF
— мгновенный центр скоростей шатуна BAF
ось  — мгновенная ось вращения шатуна BAF.
— мгновенная ось вращения шатуна BAF.
(1) 
Примечание: Так как на Рис.1 звенья механизма изображены в масштабе, то величины (размеры) мгновенных радиусов точек, а именно:  и
и  берутся с рисунка.
берутся с рисунка.

C3: вектор скорости  по направляющей в сторону поворота шатуна (вниз).
по направляющей в сторону поворота шатуна (вниз).
Определим скорость точки B
Угловая скорость шатуна BAF:
(2) 
C4: Вектор  , т.к. шатун относительно оси поворачивается по часовой стрелке.
, т.к. шатун относительно оси поворачивается по часовой стрелке.
(3) 
Примечание: Величина  так-же берётся с Рис.1.
так-же берётся с Рис.1.
Из (3) получаем

C5: вектор  и направлен в сторону вращения шатуна BAF.
и направлен в сторону вращения шатуна BAF.
1.4 Рассмотрим шатун «BE»
Точка  — мгновенный центр скоростей шатуна «BE»
— мгновенный центр скоростей шатуна «BE»
Ось  — мгновенная ось вращения шатуна «BE»
— мгновенная ось вращения шатуна «BE»
(4) 
Из (4) получаем:

C6: Вектор  и направлен по направляющей вверх (см. Рис.1).
и направлен по направляющей вверх (см. Рис.1).
Угловая скорость шатуна BE:
(5) 
Примечание: Величину  берём из рис. 1 с учётом масштаба.
берём из рис. 1 с учётом масштаба.
C7: вектор угловой скорости шатуна BE  (от нас),
(от нас),
т.к. «отсюда» видим вращение по часовой стрелке относительно оси
1.5 Определим скорость точки M:
а) метод «мгновенного центра скоростей»:
Точка M  шатуну BAF, точка
шатуну BAF, точка  — мгновенный центр скоростей BAF,
— мгновенный центр скоростей BAF,  — мгновенный радиус точки M.
— мгновенный радиус точки M.
(6) 
Из (6) получаем:

C8: Вектор скорости  и направлен в сторону вращения шатуна BAF
и направлен в сторону вращения шатуна BAF
б) метод «полюса»: точка А — полюс
(7) 
Где  — вращательная скорость точки M относительно «полюса» A, вектор направлен перпендикулярно
— вращательная скорость точки M относительно «полюса» A, вектор направлен перпендикулярно 




 = 0.342 (величина угла взята с рис.1)
= 0.342 (величина угла взята с рис.1)
Сравним  = 0.68 m/c (мцс) и «метод полюса» = 0.73 m/c : погрешность расчёта составляет
= 0.68 m/c (мцс) и «метод полюса» = 0.73 m/c : погрешность расчёта составляет

II. Определение ускорений точек и угловых ускорений звеньев механизма. (методом «полюса»)
2.1 Ускорение точки A, принадлежащей кривошипу OA, который вращается вокруг неподвижной оси 
(8) 
(9) 
где  и
и  — вращательное и осестремительное ускорения точки A около оси
— вращательное и осестремительное ускорения точки A около оси  соответственно.
соответственно.
(10) 

С учётом (9) и (10) из (8) получим:
(11) 
(12) 
тогда их (11) с учётом (12) получим

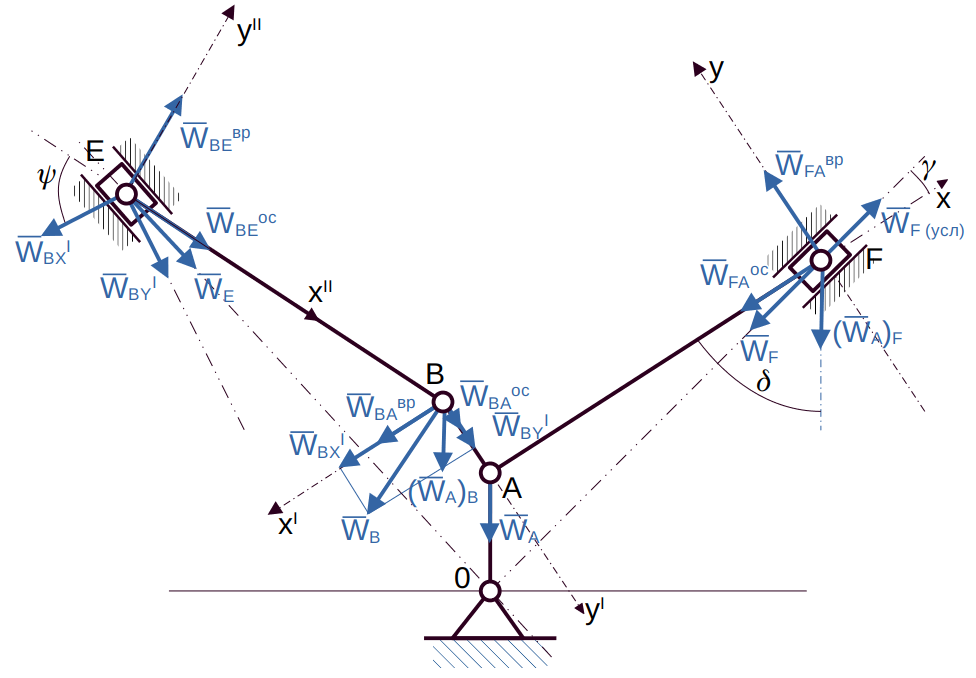
Рис.2
C9:  направлен из точки A к оси (см.рис.2).
направлен из точки A к оси (см.рис.2).
2.2 Рассмотрим шатун BAF
а) определяем ускорение точки F
(13) 
где  и
и  — вращательное и осестремительное ускорения точки F вокруг «полюса» A, соответственно.
— вращательное и осестремительное ускорения точки F вокруг «полюса» A, соответственно.
(14) 
C10: Вектор осестремительного ускорения направлен от точки F к «полюсу» A (см.рис.2)
C11: Для вектора вращательного ускорения известна только линия действия (л.д.),  (направление также выбираем условно см.рис.2)
(направление также выбираем условно см.рис.2)
C12: Для вектора  — (ускорения «ползуна» F) известна только линия действия (л.д.) — направляющая «OF» (направление также выберем условно)
— (ускорения «ползуна» F) известна только линия действия (л.д.) — направляющая «OF» (направление также выберем условно)

(15) 
Спроектируем векторное равенство (13) на оси координат «XFY»:
на ось  :
:
(16) 
на ось  :
:
(17) 
C13:  (см.рис.2)
(см.рис.2)

 , где величину этих углов берём с чертежа (см.рис.2)
, где величину этих углов берём с чертежа (см.рис.2)
Далее перепишем (16) и (17), подставляя числовые значения:
(18) 
(19) 
Из уравнения (16) получим:

C14: Получили, что  , следовательно, условное направление надо поменять на противоположное (см.рис.2)
, следовательно, условное направление надо поменять на противоположное (см.рис.2)
Из уравнения (17) получим:

C15: Так как  , то условное направление верно! (см.рис.2).
, то условное направление верно! (см.рис.2).
Определим угловое ускорение шатуна BAF:
(20) 
Направление  определяем из векторного произведения
определяем из векторного произведения
 (см.рис.2)
(см.рис.2)
C16: Вектор  и, так как
и, так как  , то шатун «BAF» вращается замедленно ! (см.рис.1)
, то шатун «BAF» вращается замедленно ! (см.рис.1)
б) Определим ускорение точки  (метод «полюса»):
(метод «полюса»):
 (метод «полюса»):
(метод «полюса»): (21) 

где  (см. пункт I.)
(см. пункт I.)
C17: Вектор  направлен по
направлен по  от точки B к «полюсу» A (см.рис.2).
от точки B к «полюсу» A (см.рис.2).
С учётом (20) получим, что:

(22) 
C18: Вектор  (см.рис.2).
(см.рис.2).
Спроектируем векторное равенство (21) на оси  :
:
на ось 
(23) 
на ось 
(24) 

угол  берём с чертежа (см.рис.2).
берём с чертежа (см.рис.2).
Перепишем (23) и (24), подставляя числовые значения:
(25) 
(26) 
Далее находим абсолютную величину ускорения точки B:
(27) 
Направление вектора  определяется направляющими косинусами по отношению к осям BXY.
определяется направляющими косинусами по отношению к осям BXY.
(28) 
Соотношение (27) и (28) представляют вектор по величине (27) и направлению (28)
2.3 Рассмотрим шатун «BE»
Запишем для  — вектора ускорения точки
— вектора ускорения точки  шатуну «BE» (по методу «полюса») векторное равенство:
шатуну «BE» (по методу «полюса») векторное равенство:
(29) 
Спроецируем (29) на оси координат  и
и  (см. рис.2)
(см. рис.2)
(30) 
(31) 

Далее перепишем (30) и (31), подставляя числовые значения, получим
(32) 
(33) 
Здесь также значение угла  берём с чертежа (см.рис.2)
берём с чертежа (см.рис.2)

Из (32) определим величину вектора ускорения точки E

Из (33) определим величину вектора вращательного ускорения точки «E» около «полюса» B:

(34) 
Определим величину углового ускорения шатуна BE с учётом (34)

Направление вектора  определим из векторного произведения:
определим из векторного произведения:
(35) 
C19: Так как получили (34), что  , то следует условное направление вектора изменить на противоположное (рис.2), тогда чтобы удовлетворить векторное произведение (35), вектор
, то следует условное направление вектора изменить на противоположное (рис.2), тогда чтобы удовлетворить векторное произведение (35), вектор  (см. рис.1), а поскольку получили, что
(см. рис.1), а поскольку получили, что  , то, значит, характер вращения шатуна «BE» — ускоренный.
, то, значит, характер вращения шатуна «BE» — ускоренный.
Ответ:


Силовой расчет механизма
Задачей силового анализа является определение при заданном законе движения неизвестной внутренней силы, то есть усилия (реакции) в кинематических парах. Эта задача решается с применением принципа Даламбера. Силовой расчет плоских рычажных механизмов выполняется по группам Асура в порядке обратном их присоединения к входному звену.
Определение углового ускорения звена приведения
Угловое ускорение определяем из дифференциального уравнения машинного агрегата:

;
где

Расчет производим для 10-го положения механизма (Мпр10 — максимальный).



-угол наклона касательной к кривой графика к оси абсцисс в исследуемой точке.
Подставляем ранее определенные значения и получим:

Ведущее звено движется замедленно.
Определение линейных и угловых скоростей, ускорений точек и звеньев механизма

Для построения плана механизма в 10-ом положении примем масштабный коэффициент м/мм
Для построения плана скоростей определим скорость точки В.

м/с
Приняв отрезок pb=340 мм, определим масштабный коэффициент.

м/(с·мм)
Построение плана ведется в соответствии с векторными уравнениями рассмотренными в положении №10. Тогда действительные скорости:

м/c
м/c
с-1
м/c





Направление получим, поместив вектор в точку С звена 2 и рассмотрев поворот звена под его действием относительно точки В.
Так как кривошип вращается неравномерно, ускорение точки В кривошипа равно:




Выбираем масштабный коэффициент для ускорения .
Вычисляем отрезки изображающие и

мм,


 мм
мм
Из полюса откладываем ¦ АВ направленный к центру вращения, отрезок + АВ в направлении .

Ускорение точки С найдем, решив графически систему векторных уравнений.

где нормальная составляющая ¦ СВ и равна:



мм

тангенциальная составляющая + СВ.


Точка принадлежит стойке, поэтому ¦.
Положение точки найдем по теореме подобия:

мм
Тогда действительные ускорения точек и звеньев равны:

м/с2
м/с2
м/с2




Направление получим, помещая в точку С и рассматривая поворот звена 2 под его действием относительно точки В. Звено движется ускоренно.
Расчет сил, действующих на звенья механизма
Определим силы тяжести звеньев, главные векторы и главные моменты сил инерции звеньев.
Звено 1:


— т.к. кривошип уравновешен.
 Звено 2:
Звено 2:


Звено 3:




Ф2= ; Ф3=
Определение значений динамических реакций в кинематических парах групп Ассура
Fc[10] = 33221,2 H

Отсоединим группу Асура (2; 3). Приложим все известные внешние силы, главный вектор сил инерции Fи2 и главный момент сил инерции Ми2, а вместо отброшенных звеньев 1 и стойки 0 приложим реакции F21 и F30, причем неизвестного по величине F21 представим как сумму: , а реакцию F30 направим перпендикулярно направляющей ползуна.

Определим реакцию из условия для звена 2





Для определения составляющей и реакции F30 запишем на основании принципа Даламбера векторное уравнение статики для групп Ассура (2; 3)


Выбираем масштабный коэффициент Н/мм
Определим чертежные отрезки, изображающие силы на чертеже:






Строим план сил группы Асура (2; 3)
Из плана определяем:





Переходим к силовому расчету механизма 1 класса. В точку В приложим реакцию . К звену 1 прикладываем главный момент сил инерции и движущий момент. Рассмотрим равновесие звена 1 относительно точки А.

Из плана сил определяем: .
Оценка точности расчетов
Находим относительную погрешность:

594,6 + 1258,8 — 33600·58,05·0,00095 = 1853,4 — 1852,9 = 0,5 ? 0.
Рассмотрим понятия угловой скорости и углового ускорения при вращении твердого тела в теории и на примерах решения задач.
Угловая скорость
Угловой скоростью называют скорость вращения тела, определяющуюся приращением угла поворота тела за некоторый промежуток (единицу) времени.
Обозначение угловой скорости: ω (омега).
Рассмотрим некоторое твердое тело, вращающееся относительно неподвижной оси.
С этим телом свяжем воображаемую плоскость П, которая совершает вращение вместе с заданным телом.
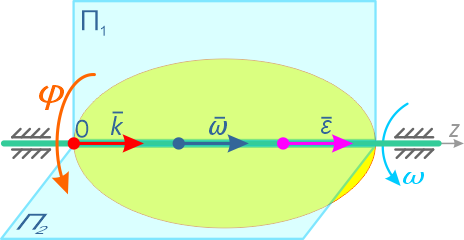
Вращательное движение определяется двугранным углом φ между двумя плоскостями, проходящими через ось вращения. Изменение этого угла с течением времени есть закон вращательного движения:
Положительным считается угол, откладываемый против хода часовой стрелки, если смотреть навстречу выбранному направлению оси вращения Oz. Угол измеряется в радианах.
Быстрота изменения угла φ (перемещения плоскости П из положения П1 в положение П2) – это и есть угловая скорость:
Приняв вектор k как единичный орт положительного направления оси, получим:
Вектор угловой скорости – скользящий вектор: он может быть приложен к любой точке оси вращения и всегда направлен вдоль оси, при положительном значении угловой скорости направления ω и k совпадают, при отрицательном – противоположны.
Формулы угловой скорости
Формула для расчета угловой скорости в зависимости от заданных параметров вращения может иметь вид:
- если известно количество оборотов n за единицу времени t:

- если задан угол поворота φ за единицу времени:
- если известна окружная скорость точки тела v и расстояние от оси вращения до этой точки r:


Размерности угловой скорости:
- Количество оборотов за единицу времени [об/мин], [c-1].
- Угол поворота за единицу времени [рад/с].
Определение угловой скорости
Пример: Диск вращается относительно своего центра.
Известна скорость v некоторой точки A, расположенной на расстоянии r от центра вращения диска.
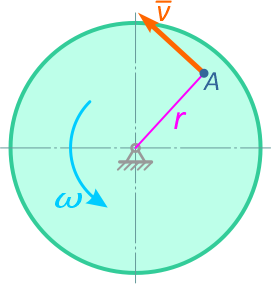
Определить величину и направление угловой скорости диска ω, если v = 5 м/с, r = 70 см.
Таким образом, угловая скорость диска составляет 7,14 оборотов в секунду. Направление угловой скорости можно определить по направлению скоростей её точек.
Вектор скорости точки A стремится повернуть диск относительно центра вращения против хода часовой стрелки, следовательно, направление угловой скорости вращения диска имеет такое же направление.
Другие примеры решения задач >
Угловое ускорение
Угловое ускорение характеризует величину изменения угловой скорости при вращении твердого тела:
Обозначение: ε (Эпсилон)
Единицы измерения углового ускорения: [рад/с2], [с-2]
Вектор углового ускорения так же направлен по оси вращения. При ускоренном вращении их направления совпадают, при замедленном — противоположны.
Другими словами, при положительном ускорении угловая скорость нарастает (вращение ускоряется), а при отрицательном — уменьшается (вращение замедляется).
Для некоторых частных случаев вращательного движения твердого тела могут быть использованы формулы:
Расчет углового ускорения
Пример: По заданному значению касательной составляющей полного ускорения aτ точки B, расположенной на расстоянии r от центра вращения колеса.
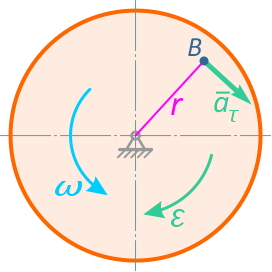
Требуется определить величину и направление углового ускорения колеса ε, если aτ = 10 м/с2, r = 50 см.
Угловое ускорение колеса в заданный момент времени составляет 20 оборотов за секунду в квадрате. Направление углового ускорения определяется по направлению тангенциального ускорения точки.
Здесь, угловое ускорение направлено противоположно направлению угловой скорости вращения колеса. Это означает, что вращение колеса замедляется.
В технике угловая скорость часто задается в оборотах в минуту n [об/мин]. Один оборот – это 2π радиан:
Например, тело совершающее 1,5 оборота за одну секунду имеет угловую скорость
ω = 1,5 с-1 = 9,42 рад/с.
Смотрите также:
- Примеры расчета угловой скорости и ускорения
- Скорости и ускорения точек вращающегося тела