Частота вращения ротора асинхронного двигателя
n2
=n1(1
— s)
= (f160/
p)(l
—
s).
(15.2)
Из
этого выражения следует, что частоту
вращения ротора асинхронного двигателя
можно регулировать изменением какой —
либо из трех величин: скольжения s,
частоты
тока в обмотке статора f1
или числа полюсов в обмотке статора 2р.
Регулирование
частоты вращения изменением скольжения
s
возможно
тремя способами: изменением подводимого
к обмотке статора напряжения, нарушением
симметрии этого напряжения и изменением
активного сопротивления обмотки ротора.
Регулировка
частоты вращения изменением скольжения
происходит только в нагруженном
двигателе. В режиме холостого хода
скольжение, а следовательно, и частота
вращения остаются практически неизменными.
Регулирование
частоты вращения изменением подводимого
напряжения. Возможность
этого способа регулирования подтверждается
графиками М = f(s),
построенными для разных значений U1
(см. рис. 13.5). При неизменной нагрузке на
валу двигателя увеличение подводимого
к двигателю напряжения вызывает рост
частоты вращения. Однако диапазон
регулирования частоты вращения
получается небольшим, что объясняется
узкой зоной устойчивой работы двигателя,
ограниченным значением критического
скольжения и недопустимостью значительного
превышения номинального значения
напряжения. Последнее объясняется тем,
что с превышением номинального напряжения
возникает опасность чрезмерного
перегрева двигателя, вызванного резким
увеличением электрических и магнитных
потерь. В то же время с уменьшением
напряжения U1
двигатель
утрачивает перегрузочную способность,
которая, как известно, пропорциональна
квадрату напряжения сети (см. § 13.2).
Подводимое
к двигателю напряжение изменяют либо
регулировочным автотрансформатором,
либо реакторами, включаемыми в разрыв
линейных проводов.
Узкий
диапазон регулирования и неэкономичность
(необходимость в дополнительных
устройствах) ограничивают область
применения этого способа регулирования
частоты вращения.
Регулирование
частоты вращения нарушением симметрии
подводимого напряжения. При
нарушении симметрии подводимой к
двигателю трехфазной системы напряжения
вращающееся поле статора становится
эллиптическим (см. § 9.4). При этом поле
приобретает обратную составляющую
(встречное поле), которая создает момент
Мобр,
направленный встречно вращающему
моменту Мпр.
В итоге результирующий электромагнитный
момент двигателя уменьшается (М = Мпр
— Мобр).
Механические
характеристики двигателя при этом
способе регулирования располагаются
в зоне между характеристикой при
симметричном напряжении (рис. 15.10, а,
кривая 1) и характеристикой при однофазном
питании двигателя (кривая 2) — пределом
несимметрии трехфазного
напряжения.
Для
регулировки несимметрии подводимого
напряжения можно в цепь одной из фаз
включить однофазный регулировочный
автотрансформатор (AT)
(рис. 15.10, б). При уменьшении напряжения
па выходе AT
несимметрия увеличивается и частота
вращения ротора уменьшается. Недостатками
этого способа регулирования являются
узкая зона
Рис.
15.10. Механические характеристики (а) и
схема включения (б) асинхронного двигателя
при регулировании частоты вращения
изменением симметрии трехфазной
системы
регулирования
и уменьшение КПД двигателя по мере
увеличения несимметрии напряжения.
Обычно этот способ регулирования частоты
вращения применяют лишь в двигателях
малой мощности.
Регулирование
частоты вращения изменением активного
сопротивления в цепи ротора. Этот
способ регулирования частоты вращения
возможен лишь в двигателях с фазным
ротором. Механические характеристики
асинхронного двигателя, построенные
для различных значений активного
сопротивления цепи ротора (см. рис.
13.6), показывают, что с увеличением
активного сопротивления ротора
возрастает скольжение, соответствующее
заданному нагрузочному моменту.
Частота вращения двигателя при этом
уменьшается. Зависимость скольжения
(частоты вращения) от активного
сопротивления цепи ротора выражается
формулой, полученной преобразованием
(13.13):
s
= m1I/22
r‘2/
(ω1
М).
(15.3)
Практически
изменение активного сопротивления цепи
ротора достигается включением в цепь
ротора регулировочного реостата (РР),
подобного пусковому реостату (ПР) (см.
рис. 15.2), но рассчитанного на длительный
режим работы. Электрические потери в
роторе пропорциональны скольжению (Рэ2
= sPэм),
поэтому уменьшение частоты вращения
(увеличение скольжения) сопровождается
ростом электрических потерь в цепи
ротора и снижением КПД двигателя. Так,
если при неизменном нагрузочном моменте
на валу двигателя увеличить скольжение
от 0,02 до 0,5, что соответствует уменьшению
частоты вращения примерно вдвое, то
потери в цепи ротора составят почти
половину электромагнитной мощности
двигателя. Это свидетельствует о
неэкономичности рассматриваемого
способа регулирования. К тому же
необходимо иметь в виду, что рост потерь
в роторе сопровождается ухудшением
условий вентиляции из-за снижения
частоты вращения, что приводит к перегреву
двигателя (см. § 31.1).
Рассматриваемый
способ регулирования имеет еще и тот
недостаток, что участок механической
характеристики, соответствующий
устойчивой работе двигателя, при
введении в цепь ротора добавочного
сопротивления становится более
пологим и колебания нагрузочного
момента на валу двигателя сопровождаются
значительными изменениями частоты
вращения ротора. Это иллюстрирует
рис. 15.11, на котором видно, что если
нагрузочный момент двигателя изменится
на ΔМст
= М/ст
– М//ст,
то изменение частоты
вращения при выведенном регулировочном
реостате ( rд‘
= 0 ) составит Δn2I,
а при введенном реостате — Δn2II.
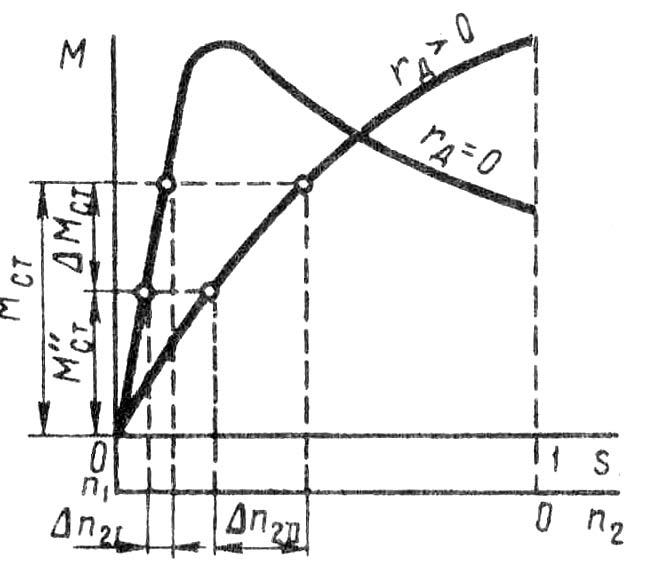
Рис.
15.11. Влияние сопротивления цепи ротора
на
колебания
частоты вращения при изменении нагрузки
В
последнем случае изменение частоты
вращения значительно больше.
Но
несмотря на указанные недостатки,
рассмотренный способ регулирования
частоты вращения широко применяется в
асинхронных двигателях с фазным ротором.
В зависимости от конструкции
регулировочного реостата этот способ
регулирования частоты вращения может
быть плавным (при плавном изменении
сопротивления РР) или ступенчатым (при
ступенчатом изменении сопротивления
РР).
Способ
обеспечивает регулирование частоты
вращения в широком диапазоне, но
только вниз от синхронной частоты
вращения. Вместе с тем он обеспечивает
двигателю улучшенные пусковые
свойства (см. § 15.1).
Регулирование
частоты вращения изменением частоты
тока в статоре. Этот
способ регулирования (частотное
регулирование) основан на изменении
синхронной частоты вращения n1
= f1
60/ р
.
Для
осуществления этого способа регулирования
необходим источник питания двигателя
переменным током с регулируемой частотой.
В качестве таких источников могут
применяться электромашинные, ионные
или полупроводниковые преобразователи
частоты (ПЧ). Чтобы регулировать частоту
вращения, достаточно изменить частоту
тока f1.
Но с изменением частоты f1
= ω1p/
(2π) будет изменяться и максимальный
момент [см. (13.18)]. Поэтому для сохранения
неизменными перегрузочной способности,
коэффициента мощности и КПД двигателя
на требуемом уровне необходимо
одновременно с изменением частоты
f1
изменять и напряжение питания U1.
Характер одновременного изменения f1
и U1
зависит от закона изменения момента
нагрузки и определяется уравнением
U/1
/U1
= (f1
//f1)
(15.4)
где
U1
и М — напряжение и момент при частоте
f1
; U’1
и М’ -напряжение и момент при частоте f
‘1.
Если
частота вращения двигателя регулируется
при условии постоянства момента нагрузки
( М = М’ = const),
то подводимое к двигателю напряжение
необходимо изменять пропорционально
изменению частоты тока:
U‘1
= U1
f
‘1/f1
(15.5)
При
этом мощность двигателя увеличивается
пропорционально нарастанию частоты
вращения. Если же регулирование
производится при условии постоянства
мощности двигателя ( Рэм
= Мω1
= const),
то подводимое напряжение следует
изменять в соответствии с законом
U‘1
= U1 .
.
(15.6)
Частотное
регулирование двигателей позволяет
плавно изменять частоту вращения в
широком диапазоне (до 12:1). Однако источники
питания с регулируемой частотой тока
удорожают установку. Поэтому частотное
регулирование до последнего времени
применялось в основном для одновременного
регулирования группы двигателей,
работающих в одинаковых условиях
(например, рольганговых двигателей).
Но благодаря развитию силовой
полупроводниковой техники в последние
годы созданы устройства частотного
регулирования, технико-экономические
показатели которых оправдывают их
индивидуальное применение для
регулирования частоты вращения
одиночных двигателей.
Использование
асинхронных двигателей, укомплектованных
такими устройствами для частотного
регулирования, наиболее целесообразно
в пожаро- и взрывоопасных средах
(химическая и нефтеперерабатывающая
промышленность), где применение
коллекторных двигателей (см. гл. 29)
недопустимо.
Регулирование
частоты вращения изменением числа
полюсов обмотки статора. Этот
способ регулирования частоты вращения
дает ступенчатую регулировку. Так, при
f1
=50 Гц и р = 1÷5 пар полюсов можно получить
следующие синхронные частоты вращения:
3000, 1500, 1000, 750, 600 об/мин.
Изменять
число полюсов в обмотке статора можно
либо укладкой
на
статоре двух обмоток с разным числом
полюсов, либо укладкой на статоре одной
обмотки, конструкция которой позволяет
путем переключения катушечных групп
получать различное число полюсов.
Последний способ получил наибольшее
применение.
Принцип преобразования
четырехполюсной обмотки в двухполюсную
(для одной фазы) показан на рис. 15.12: при
последовательном согласном соединении
двух катушек возбуждаемое ими магнитное
поле образует четыре полюса (рис. 15.12,
а); при последовательном
встречном (рис. 15.12, б) или параллельном
соединениях (рис. 15.12, в) — два полюса.
Таким образом, принцип образования
полюсно переключаемой обмотки основан
на том, что
каждая фаза обмотки делится на части
(катушечные группы), изменяя на разное
число
полюсов
схему
соединения которых получают разное
число полюсов.

Рис
15.12. Схемы включения обмотки
статора
Возможны
два режима работы асинхронных двигателей
с полюсно переключаемыми обмотками:
режим
постоянного момента (рис. 15.13, а) — при
переключении двигателя с одной частоты
вращения на другую вращающий момент на
валу двигателя М2
остается неизменным, а мощность Р2
изменяется пропорционально частоте
вращения n2:
Р2
= 0,105 М2
n2
(15.7)
режим
постоянной мощности (рис. 15.13, б) — при
переключении двигателя с одной частоты
вращения на другую мощность P2
остается примерно одинаковой, а момент
на валу M2
изменяется соответственно изменению
частоты вращения n2:
М2
=
9,55 Р2/
n2.
(15.8)
Рис.
15.13. Схемы переключения числа полюсов
и механические характеристики в
режимах постоянного момента (а) и
постоянной скорости (б)
Если
на статоре расположить две полюсно
переключаемые обмотки, то получим
четырехскоростной двигатель. Однако
возможно применение и одной обмотки,
допускающей путем переключения
катушечных групп получение до четырех
вариантов различных чисел полюсов.
Например, асинхронный двигатель типа
4А180М12/8/6/4 имеет на статоре обмотку,
допускающую переключение на 12,8,6,4
полюса.
Регулирование
частоты вращения изменением числа
полюсов на статоре применяют исключительно
в асинхронных двигателях с короткозамкнутым
ротором, так как число полюсов в обмотке
этого ротора всегда равно числу полюсов
статора и для изменения частоты вращения
достаточно изменить число полюсов в
обмотке ротора. В случае же фазного
ротора пришлось бы и на роторе применить
полюсно переключаемую обмотку, что
привело бы к недопустимому усложнению
двигателя.
-
Понятие
о несимметричных режимах. Работа при
несимметричном напряжении
-
И
несимметрия сопротивлений
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Определение оборотов электродвигателя по катушкам обмотки
Просмотров 5.4k. Опубликовано 16.06.2018
Обновлено 16.06.2018
Иногда, в моей практике приходилось сталкиваться с одной проблемой, связанной с асинхронными электродвигателями — как определить количество оборотов ротора электродвигателя, если нет бирки и технической документации на электромотор?
Вопрос, на самом деле, решается просто — обороты можно определить по катушкам обмотки статора асинхронного электродвигателя.
Асинхронные электродвигатели делятся по количеству оборотов ротора на: 1000 об/мин, 1500 об/мин и 3000 об/мин. При этом следует помнить, что если мы называем асинхронный электродвигатель «тысячником», то у него нет 1000 об/мин, т.к. он асинхронный (ротор отстаёт от магнитного поля). У него может быть 940 об/мин , 980 об/мин или около этого , но не 1000 об/мин. Тоже самое касается и «полуторатысячников» (1440 — 1480 об/мин), и «трёхтысячников» (2940 — 2980 об/мин).
Как определить обороты ротора по обмотке статора
Открываем одну из двух крышек электродвигателя и смотрим на катушки обмотки, вернее, на одну катушку. Она может состоять из нескольких секций (2-х , 3-х , 4-х ).

В статоре находим катушку, которая нам лучше всего видна. Теперь смотрим на её размер, относительно железа статора. Я не буду рассказывать, как катушки соединены между собой, как соединены секции в катушке, через сколько пазов в статоре они закладываются и т.д. Это нам сейчас не нужно. Нам сейчас нужно определить расстояние, которое занимает одна катушка по кольцу железа статора.
Определив это расстояние (даже на глаз), мы может с уверенностью сказать сколько оборотов имеет данный асинхронный электродвигатель.
1. Если катушка занимает половину кольца железа статора, то электродвигатель на 3000 об/мин.

2. Если катушка занимает 1/3 кольца железа, то электродвигатель на 1500 об/мин.

3. Если катушка занимает 1/4 кольца железа, то электродвигатель на 1000 об/мин.

Вот так всё легко и просто.
Главное меню:
- Основы
- Электромашины
- Оборудование
- Нормы
- Подстанция
- Комплектные трансформаторные подстанции
- Оборудование подстанций
- Вакуумные выключатели
- ВВ/TEL
- ВР
- ВРО
- ВР1
- ВР1 для КСО
- ВРС
- 3АН5
- ВГГ-10
- Камеры КСО
- Ограничители перенапряжений 6(10) кВ
- Масляный выключатель
- ВПМ-10
- Техническое описание ВПМ
- ВМП-10
- ВМГ-133
- Выключатель нагрузки автогазовый ВНА
- Описание выключателя
- Изображение выключателя
- Ремонт электрооборудования
- Повышение надежности МВ, приводов МВ
- Установки компенсации реактивной мощности
- Общие сведения об УКРМ
- УКРМ 0,4 кВ
- УКРМ 6(10) кВ
- Выбор места расположения питающих подстанций
- Электроснабжение
- Освещение
- Воздушная линия
Основы > Задачи и ответы > Сборник задач — электрические машины
Асинхронные электродвигатели (страница 2)
1.
Определить угловую скорость вращении ротора асинхронного электродвигателя, если обмотка статора четырехполюсная, частота напряжения сети, к которой присоединен электродвигатель, 50 Гц и скольжение ротора равно 3,5%.Решение: Частота токов, проходящих в обмотках статора, равна частоте напряжения сети: Кроме того, известно, что обмотка статора четырехполюсная, т. е. число пар полюсов р = 2.
Скорость вращения магнитного потока, вызываемого трехфазной системой токов, проходящих в обмотках статора, зависит от частоты этих токов
и числа пар полюсов обмотки р, так как , откуда число оборотов в минуту вращающегося синхронно магнитного потока![]() Угловая скорость вращения
Угловая скорость вращения![]() Вращение ротора асинхронного электродвигателя возможно лишь при наличии отставания ротора от вращающегося магнитного потока. Величина, характеризующая это отставание, называется скольжением: — скорость вращения магнитного потока; — скорость вращения ротора.Подставив числовые значения, получим
Вращение ротора асинхронного электродвигателя возможно лишь при наличии отставания ротора от вращающегося магнитного потока. Величина, характеризующая это отставание, называется скольжением: — скорость вращения магнитного потока; — скорость вращения ротора.Подставив числовые значения, получим![]()
![]() Угловая скорость вращения ротора
Угловая скорость вращения ротора![]() 2. На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?Решение: В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости
2. На щитке асинхронного электродвигателя значится: 730 об/мин, 50 Гц.Определить скольжение ротора, вращающегося с указанной скоростью, и число пар полюсов обмотки статора. Каким было скольжение ротора в первые мгновения пуска?Решение: В табл. 13 синхронных скоростей вращения при частоте 50 Гц ближайшей скоростью вращения (по отношению к скорости ![]() ) является скорость
) является скорость ![]() .Следовательно, скольжение ротора
.Следовательно, скольжение ротора![]() Число пар полюсов обмотки статора
Число пар полюсов обмотки статора![]()
В момент пуска ротор неподвижен
. Поэтому скольжение при пуске![]() Такое значение имеет скольжение ротора в момент пуска любого асинхронного электродвигателя.
Такое значение имеет скольжение ротора в момент пуска любого асинхронного электродвигателя.
Таблица 13
| р пар полюсов | 1 | 2 | 3 | 4 | 5 |
| n, об/мин | 3000 | 1500 | 1000 | 750 | 600 |
3.
В разрыв провода линии, соединяющей контактные кольца ротора асинхронного электродвигателя с трехфазным реостатом, введен магнитоэлектрический амперметр, шкала которого имеет нулевое значение посередине (рис. 80). Разомкнув рубильник, шунтировавший амперметр во время разбега ротора, не поднимая щеток, наблюдали за отклонениями амперметра: оказалось, что за полминуты указательная стрелка прибора совершила 60 полных колебаний.Определить скорость вращения ротора в течение указанного промежутка времени, если обмотка статора шестиполюсная и частота напряжения сети 50 Гц.
Решение:
Полное колебание указательной стрелки соответствует полному периоду тока в обмотке ротора. Если 60 полных колебаний (периодов) произошло за полминуты, то число полных колебаний (периодов) в секунду равно двум. Следовательно, Магнитный поток в асинхронном электродвигателе вращается относительно ротора со скоростью, равной разности скоростей: причем частота тока в роторе Подставив числовые значения, получим
При шестиполюсной обмотке статора и частоте токов в цепи статора
скорость вращения магнитного потока
Подставим в выражение для
откуда скорость вращения ротора4. Когда трехфазный асинхронный двигатель с фазным ротором присоединили к сети с линейным напряжением 220 В, напряжение между контактными кольцами при разомкнутой обмотке ротора составило 90 В.Определить коэффициент трансформации, рассматривая этот электродвигатель как трансформатор в режиме холостого хода, если обмотки статора и ротора соединены звездой.Решение: Фазное напряжение на обмотке статора при схеме соединения звездой в раз меньше линейного напряжения. Следовательно, Фазное напряжение на обмотке ротора Коэффициент трансформации фазных напряжений5. Асинхронный электродвигатель с короткозамкнутым ротором характеризуется отношением вращающих моментов соответственно при пуске и при номинальном режиме .Можно ли осуществить пуск двигателя в случае полной его нагрузки на валу и понижения напряжения в сети на 5 и 10%? К сети присоединен статор.Решение: Вращающий момент асинхронного двигателя прямо пропорционален квадрату напряжения в сети:
Следовательно, если напряжение в сети понизится на 5% и составит
Так как пусковой момент при номинальном напряжении , то при понижении напряжения в сети на 5% пусковой момент Таким образом, пуск при этих условиях позволит электродвигателю развить вращающий момент больше номинального.
Если напряжение в сети понизится на 10% и составит
Пусковой момент при указанном понижении напряжения долю, которую составляет пусковой вращающий момент от вращающего момента при номинальном напряжении. Тогда для возможности пуска электродвигателя при номинальной нагрузке должно быть выполнено равенство Поэтому при пуске электродвигателя напряжение сети может составлять от номинального напряжения долю
Таким образом, при заданной кратности пускового момента от номинального
понижение напряжения в сети может происходить на и пуск может быть осуществлен при номинальной нагрузке на валу электродвигателя.
6. Асинхронный электродвигатель с короткозамкнутым ротором типа А51-4 имеет следующие номинальные данные: ; кратность вращающих моментов .
Определить вращающие моменты: номинальный , максимальный и пусковой Решение:
Номинальный вращающий момент можно определить из основного соотношения измерен в и мощность Р — в Вт. При этом Если подставить сюда в качестве Р мощность, измеренную в киловаттах, то число будет в 1000 раз меньше.Таким образом, при тех же единицах измерения вращающего момента получим Подставим величины номинального режима: Используя известные кратности моментов, максимальный вращающий момент пусковой вращающий момент7. Асинхронный электродвигатель развивает номинальную мощность при номинальной скорости вращения ротора , имея перегрузочную способность 2,1.Выразить зависимость между вращающим, моментом и скольжением ротора S электродвигателя.Решение: Номинальный вращающий момент
Перегрузочная способность
l = 2,1 представляет собой отношение максимального вращающего момента к номинальному вращающему моменту Номинальному вращающему моменту соответствует и номинальное скольжение подставлена ближайшая большая (по отношению к ) синхронная скорость вращения магнитного потока статора.Зависимость между вращающим моментом и скольжением ротора s в асинхронном двигателе выражается формулой означает критическое скольжение, а и s соответствуют одному и тому же режиму работы. Если в левую часть подставить , то в качестве s следует подставить . Тогда можно определить критическое скольжение , при котором имеет место момент . В этом случае получается квадратное уравнение, из которого берут большее значение корня.Так как Разделив на 0,238 левую и правую части равенства и сосредоточив все члены в одной стороне, получим Корни полученного квадратного уравнения Далее берется только больший из корней (при положительном знаке перед корнем):
Подставив в формулу, выражающую зависимость между вращающим моментом
и скольжением ротора s, численные значения , получим требуемую зависимость
Смотри полное содержание по представленным решенным задачам на websor.
Как определить число пар полюсов асинхронного двигателя?
Под скоростью вращения асинхронного электродвигателя обычно понимают угловую частоту вращения его ротора, которая приведена на шильдике (на паспортной табличке двигателя) в виде количества оборотов в минуту.
Трехфазный двигатель можно питать и от однофазной сети, для этого достаточно добавить конденсатор параллельно одной или двум его обмоткам, в зависимости от напряжения сети, но конструкция двигателя от этого не изменится.

Так, если ротор под нагрузкой совершает 2760 оборотов в минуту, то угловая частота данного двигателя будет равна 2760*2пи/60 радиан в секунду, то есть 289 рад/с, что не удобно для восприятия, поэтому на табличке пишут просто «2760 об/мин». Применительно к асинхронному электродвигателю, это обороты с учетом скольжения s.
Синхронная же скорость данного двигателя (без учета скольжения) будет равна 3000 оборотов в минуту, поскольку при питании обмоток статора сетевым током с частотой 50 Гц, каждую секунду магнитный поток будет совершать по 50 полных циклических изменений, а 50*60 = 3000, вот и получается 3000 оборотов в минуту — синхронная скорость асинхронного электродвигателя.
В рамках данной статьи мы поговорим о том, как определить синхронную скорость вращения неизвестного асинхронного трехфазного двигателя, просто взглянув на его статор.
По внешнему виду статора, по расположению обмоток, по количеству пазов, — можно легко определить синхронные обороты электродвигателя если у вас нет под рукой тахометра.
Итак, начнем по порядку и разберем данный вопрос с примерами.
3000 оборотов в минуту

Про асинхронные электродвигатели (смотрите — Виды электродвигателей) принято говорить, что тот или иной двигатель имеет одну, две, три или четыре пары полюсов. Минимум — одна пара полюсов, то есть минимум — два полюса.
Взгляните на рисунок. Здесь вы видите, что в статор уложено по две последовательно соединенные катушки на каждую фазу — в каждой паре катушек одна расположена напротив другой.
Эти катушки и образуют по паре полюсов на статоре.
Одна из фаз показана для ясности красным цветом, вторая — зеленым, третья — черным. Обмотки всех трех фаз устроены одинаково.
Поскольку три эти обмотки питаются по очереди (ток трехфазный), то за 1 колебание из 50 в каждой из фаз — магнитный поток статора один раз обернется на полные 360 градусов, то есть совершит один оборот за 1/50 секунды, значит 50 оборотов получится за секунду. Так и выходит 3000 оборотов в минуту.
Таким образом становится ясно, что для определения синхронных оборотов асинхронного электродвигателя достаточно определить количество пар его полюсов, что легко сделать, сняв крышку и взглянув на статор.
Общее число пазов статора разделите на число пазов, приходящихся на одну секцию обмотки одной из фаз. Если получится 2, то перед вами двигатель с двумя полюсами — с одной парой полюсов.
Следовательно синхронная частота составляет 3000 оборотов в минуту или примерно 2910 с учетом скольжения.
В простейшем случае 12 пазов, по 6 пазов на катушку, и таких катушек 6 — по две на каждую из трех фаз.
Обратите внимание, количество катушек в одной группе для одной пары полюсов может быть не обязательно 1, но и 2 и 3, однако для примера мы рассмотрели вариант с одиночными группами на пару катушек (не будем в рамках данной статьи заострять внимание на способах намотки).
1500 оборотов в минуту

Для получения синхронной скорости в 1500 оборотов в минуту, количество полюсов статора увеличивают вдвое, чтобы за 1 колебание из 50 магнитный поток совершил бы только пол оборота — 180 градусов.
Для этого на каждую фазу делают по 4 секции обмотки. Таким образом, если одна катушка занимает четверть всех пазов, то перед вами двигатель с двумя парами полюсов, образованными четырьмя катушками на фазу.
Например, 6 пазов из 24 занимает одна катушка или 12 из 48, значит перед вами двигатель с синхронной частотой 1500 оборотов в минуту, или с учетом скольжения примерно 1350 оборотов в минуту. На приведенном фото каждая секция обмотки выполнена в виде двойной катушечной группы.
1000 оборотов в минуту
Как вы уже поняли, для получения синхронной частоты в 1000 оборотов в минуту, каждая фаза образует уже три пары полюсов, чтобы за одно колебание из 50 (герц) магнитный поток обернулся бы всего на 120 градусов, и соответствующим образом повернул бы за собой ротор.
Таким образом, минимум 18 катушек установлены на статор, причем каждая катушка занимает шестую часть всех пазов (по шесть катушек на фазу — по три пары). Например, если пазов 24, то одна катушка займет 4 из них. Получится частота с учетом скольжения около 935 оборотов в минуту.
750 оборотов в минуту
Для получения синхронной скорости в 750 оборотов в минуту, необходимо, чтобы три фазы формировали на статоре четыре пары движущихся полюсов, это по 8 катушек на фазу — одна напротив другой — 8 полюсов. Если например на 48 пазов приходится по катушке на каждые 6 пазов — перед вами асинхронный двигатель с синхронными оборотами 750 (или около 730 с учетом скольжения).
500 оборотов в минуту

Наконец, для получения асинхронного двигателя с синхронной скоростью в 500 оборотов в минуту необходимо 6 пар полюсов — по 12 катушек (полюсов) на фазу, чтобы на каждое колебание сети магнитный поток поворачивался бы на 60 градусов. То есть, если например статор имеет 36 пазов, при этом на катушку приходится по 4 паза — перед вами трехфазный двигатель на 500 оборотов в минуту (480 с учетом скольжения).
FAQ по электродвигателям
Какие электродвигатели применяются чаще всего? Какие способы управления электродвигателями используются? Как прозвонить электродвигатель и определить его сопротивление? Как определить мощность электродвигателя? Как увеличить или уменьшить обороты электродвигателя? Как рассчитать ток и мощность электродвигателя? Как увеличить мощность электродвигателя? Каковы потери мощности при подключении трехфазного двигателя к однофазной сети? Какие исполнения двигателей бывают? Зачем электродвигателю тормоз? Как двигатель обозначается на электрических схемах? Почему греется электродвигатель? Типичные неисправности электродвигателей
1. Какие электродвигатели применяются чаще всего?
Наиболее распространены асинхронные электродвигатели с короткозамкнутым ротором. Они имеют сравнительно простую конструкцию и относительно недороги.
Для работы асинхронного двигателя требуется трехфазное напряжение, создающее на обмотках статора вращающееся магнитное поле.
Это поле приводит в движение ротор двигателя, который передает крутящий момент на нагрузку, например, на пропеллер вентилятора или редуктор конвейера.
Изменяя конфигурацию обмоток статора, можно менять основные характеристики привода – частоту оборотов и мощность на валу. В случае работы асинхронного электродвигателя в однофазной сети применяют фазосдвигающие и пусковые конденсаторы.

Также в настоящее время находят применение двигатели постоянного тока. Данные приводы имеют щетки, подверженные износу и искрению.
Кроме того, необходима обмотка подмагничивания (возбуждения), на которую подается постоянное напряжение.
Несмотря на эти недостатки, электродвигатели постоянного тока используются там, где необходимо быстрое изменение скорости вращения и контроль момента, а также при мощностях более 100 кВт.
В быту также применяют коллекторные (щеточные) электродвигатели переменного тока, которые имеют низкую надежность по сравнению с асинхронными.
2. Какие способы управления электродвигателями используются на практике?
Управление электродвигателем подразумевает возможность изменения его скорости и мощности.
Так, если на асинхронный двигатель подать напряжение заданной величины и частоты, он будет вращаться с номинальной скоростью и сможет обеспечить мощность на валу не более номинала.
Если же нужно понизить или повысить скорость электродвигателя, используют преобразователи частоты. ПЧ может обеспечить нужный режим разгона и торможения, а также позволит оперативно управлять частотой работы.
Для обеспечения требуемого разгона и торможения без изменения рабочей частоты применяют устройство плавного пуска (УПП). Если нужно управлять только разгоном двигателя, используют схему включения «звезда-треугольник».
Для запуска двигателей без ПЧ и УПП широко применяются контакторы, которые позволяют дистанционно управлять пуском, остановом и реверсом.
3. Как прозвонить электродвигатель и определить его сопротивление?
Асинхронный электродвигатель, как правило, имеет три обмотки. У каждой обмотки есть по два вывода, которые должны быть обозначены в клеммной коробке двигателя. Если выводы обмоток известны, то можно легко прозвонить каждую из них и сравнить величину сопротивления с остальными обмотками. Если величины сопротивлений отличаются не более, чем на 1%, то скорее всего, обмотки исправны.
Сопротивление обмоток электродвигателя измеряется с помощью омметра, как и сопротивление обмоток трансформатора. Чем больше мощность двигателя, тем меньше сопротивление его обмоток, и наоборот.
4. Как определить мощность электродвигателя?
Проще всего определить номинальную мощность электродвигателя по шильдику. На нем указана механическая мощность (мощность на валу), значение которой всегда меньше потребляемой мощности за счет потерь на трение и нагрев.
Однако, если шильдик на корпусе двигателя отсутствует, можно очень приблизительно оценить характеристики привода по его габаритам.
При одинаковой мощности двигатель с бо́льшим диаметром вала будет иметь более высокую мощность на валу и меньшую частоту оборотов.
Также мощность можно определить по нагрузке и по настройкам защитных устройств, через которые питается двигатель (мотор-автомат, тепловое реле).
Еще один способ – включаем двигатель на номинальную мощность, обеспечив нужную нагрузку на валу. После этого измеряем токоизмерительными клещами ток, который должен быть одинаков по всем обмоткам. Для приблизительной оценки мощности асинхронного двигателя, подключенного по схеме «звезда», нужно разделить номинальный измеренный ток на 2.
5. Как увеличить или уменьшить обороты электродвигателя?
Управление скоростью вращения двигателя необходимо в трех режимах работы – при разгоне, торможении, и в рабочем режиме.
Наиболее универсальный способ управления оборотами — использование частотного преобразователя. Настройками ПЧ можно добиться любой частоты вращения в пределах технической возможности. При этом можно управлять и другими параметрами электродвигателя, а также следить за его состоянием во время работы. Частоту можно менять и плавно, и ступенчато.
Управление оборотами двигателя в режиме разгона и торможения возможно при использовании УПП. Это устройство позволяет значительно снизить пусковой ток за счет плавного разгона с медленным увеличением оборотов.
6. Как рассчитать ток и мощность электродвигателя?
Бывает так, что известен ток асинхронного двигателя (по измерениям в номинальном режиме или по шильдику), но неизвестна его мощность. Как в таком случае рассчитать мощность? Обычно используют следующую формулу:
- Р = I (1,73·U·cosφ·η)
- где: Р – номинальная полезная мощность на валу двигателя в Вт (указывается на шильдике), I – ток двигателя, А, U – напряжение питания обмоток (380 В при подключении в «звезду», 220 В при подключении в «треугольник»),
- cosφ, η – коэффициенты мощности и полезного действия для учета потерь (обычно 0,7…0,8).
- Для расчета тока по известной мощности пользуются обратной формулой:
- I = P/(1,73·U·cosφ·η)
- Для двигателей мощностью 1,5 кВт и более, обмотки которых подключены в «звезду» (это подключение используется чаще всего), существует простое эмпирическое правило – чтобы приблизительно оценить ток двигателя, нужно умножить его мощность на 2.
7. Как увеличить мощность электродвигателя?
Номинальная мощность на валу, которая указывается на шильдике двигателя, обычно ограничивается допустимым током, а значит – нагревом корпуса привода. Поэтому при увеличении мощности необходимо предпринять дополнительные меры по охлаждению электродвигателя, установив отдельный вентилятор.
При использовании преобразователя частоты для повышения мощности можно изменить несущую частоту ШИМ, однако следует избегать перегрева ПЧ. Мощность также можно увеличить с помощью редуктора или ременной передачи, пожертвовав количеством оборотов, если это допустимо.
Если приведенные советы неприменимы – придётся менять двигатель на более мощный.
8. Каковы потери мощности при подключении трехфазного двигателя к однофазной сети (380 на 220)?
При таком подключении используются пусковой и рабочий фазосдвигающие конденсаторы. Номинальную мощность на валу в данном случае получить не удастся, и потери мощности составят 20-30% от номинала. Это происходит из-за невозможности обеспечить отсутствие перекоса по фазам при изменении нагрузки.
9. Какие исполнения двигателей бывают?
В зависимости от исполнения электродвигатели классифицируются по способу монтажа, классу защиты, климатическому исполнению. Существует два основных способа монтажа асинхронных электродвигателей – на лапах и через фланец. Оба варианта исполнения в различных комбинациях показаны в таблице ниже.

Виды климатического исполнения предполагают использование двигателя в определенных климатических зонах: умеренный климат (У), холодный климат (ХЛ), умеренно-холодный климат (УХЛ), тропический климат (Т), общеклиматическое исполнение (О), общеклиматическое морское исполнение (ОМ), всеклиматическое исполнение (В). Также различают категории размещения (на открытом воздухе, под навесом или в помещении и т.д.).
Класс защиты обозначает характер защиты двигателя от попадания пыли и влаги. Наиболее часто встречаются приводы с классами IP55 и IP55.
10. Зачем электродвигателю тормоз?
В некоторых устройствах (лифтах, электроталях, лебедках) при остановке двигателя необходимо зафиксировать его вал в неподвижном состоянии. Для этого применяют электромагнитный механический тормоз, который входит в конструкцию двигателя и располагается в его задней части. Управление тормозом осуществляется с помощью частотного преобразователя или схемы на контакторах.
11. Как двигатель обозначается на электрических схемах?
Электродвигатель обозначается на схемах с помощью буквы «М», вписанной в круг. Также на схемах могут быть указаны порядковый номер двигателя, количество фаз (1 или 3), род тока (переменный или постоянный), способ включения обмоток ( «звезда» или «треугольник»), мощность. Примеры обозначений показаны ниже.

12. Почему греется электродвигатель?
Двигатель может нагреваться по одной из следующих причин:
- износ подшипников и повышенное механическое трение
- увеличение нагрузки на валу
- перекос напряжения питания
- пропадание фазы
- замыкание в обмотке
- проблема с обдувом (охлаждением)
Нагрев двигателя резко снижает его ресурс и КПД, а также может приводить к поломке привода.
- 13. Типичные неисправности электродвигателей
- Выделяют два вида неисправностей электродвигателей: электрические и механические.
- К электрическим относятся неисправности, связанные с обмоткой:
- межвитковое замыкание
- замыкание обмотки на корпус
- обрыв обмотки
Для устранения этих неисправностей требуется перемотка двигателя.
Механические неисправности:
- износ и трение в подшипниках
- проворачивание ротора на валу
- повреждение корпуса двигателя
- проворачивание или повреждение крыльчатки обдува
Замена подшипников должна производиться регулярно с учетом их износа и срока службы. Крыльчатка также меняется в случае повреждения. Остальные неисправности устранению практически не подлежат, и единственный выход — замена двигателя.
Если у вас есть вопросы, ответы на которые вы не нашли в данной статье, напишите нам. Будем рады помочь!
Другие полезные материалы: Выбор электродвигателя Использование тормозных резисторов с преобразователями частоты
Что следует учитывать при выборе асинхронного электродвигателя
При выборе асинхронных электродвигателей переменного тока часто не учитываются требования к конструкции, которые связаны с их применением в составе того или иного оборудования.
Также обычно имеет место подход, основанный на универсальности электродвигателя, и тогда выбор зависит только от его напряжения, мощности и скорости вращения ротора.
Тем не менее есть еще целый ряд дополнительных аспектов для рассмотрения, таких как диапазон напряжения питания, сохранение номинальной мощности при изменении скорости вращения и область применения. Все это в итоге сводится к решению следующих вопросов: какова цель применения электродвигателя, как сделать все быстрее и эффективнее?
 Базовые принципы выбора электродвигателя
Базовые принципы выбора электродвигателя
 Базовые принципы выбора электродвигателя
Базовые принципы выбора электродвигателяОтправными точками для выбора асинхронного двигателя являются напряжение питания обмоток статора, создающего магнитное поле, а также номинальная мощность и скорость вращения ротора, которые соответствуют требованиям конкретного применения.
Еще один, не менее важный момент — это необходимый вариант установки двигателя в приводе.
Должен ли двигатель иметь крепление на основании, или он будет помещен на фланец на конце привода, или же должен предоставлять обе возможности? Кроме того, необходимо учитывать характеристики окружающей среды, в которой будет эксплуатироваться двигатель.
При этом для выбора двигателя необходимо знать, потребуется ли ему работать под дождем и имеется ли вообще риск попадания на него воды, а также оценить уровень загрязнения и наличия пыли. Для эксплуатации в жестких условиях хорошо подходят электродвигатели закрытого типа с вентиляторным охлаждением (англ.
totally enclosed fan cooled, TEFC) или электродвигатели закрытого типа без охлаждения (англ. totally enclosed non-vented, TENV). Если среда, в которой будет использоваться двигатель, не загрязнена и он будет эксплуатироваться без риска попадания на него воды, то в этом случае может быть достаточно применения каплезащищенного электродвигателя открытого исполнения (англ. open drip proof, ODP).
Выбор инвертора
Благодаря усилиям лоббистов местных энергетических компаний в сочетании с преимуществами, получаемыми при возможности регулирования скорости вращения ротора двигателей, все более распространенными становятся частотно-регулируемые приводы (ЧРП, англ. variable frequency drive, VFD).
При их использовании особое внимание следует уделять генерации электромагнитных помех, которая характерна для таких приводов исходя из самой их природы.
Для того чтобы электродвигатель мог использоваться с ЧРП, необходимо учитывать несколько технических особенностей, которым должен удовлетворять подходящий по остальным характеристикам электродвигатель. Среди них можно выделить две главные:
Максимально допустимое напряжение изоляции обмоточных проводов статора электродвигателя.
Электрическая прочность изоляции провода, из которого выполнена обмотка статора асинхронного электродвигателя, находится в пределах 1000–1600 В, но, как правило, в документации указывается значение прочности изоляции, равное 1200 В.
Однако чем больше воздушный зазор между приводом и двигателем, тем, естественно, бо́льшим скачкам переходного напряжения, воздействующим на двигатель, он может противостоять.
Электродвигатель, в котором для обмотки статора используется провод с электрической прочностью изоляции провода, равной 1600 В, может иметь ссылку на стандарт Национальной ассоциации производителей электрооборудования (NEMA, США) NEMA MG-1 2003, раздел 4, параграф 31, в котором говорится, что двигатель должен выдерживать без повреждений начальное напряжение коронного разряда (англ. corona inception voltage, CIV) уровнем до 1600 В.
Коэффициент сохранения постоянного крутящего момента (CT) двигателя, часто упоминается как «xx: 1 CT».
Этот показатель дает представление о диапазоне регулирования скорости.
По нему можно узнать, насколько может быть снижена скорость вращения ротора двигателя, при которой он будет работать с сохранением того же крутящего момента (англ.
CT — constant torque, постоянный крутящий момент), что и при номинальной скорости. Ниже этого значения крутящего момента производительность асинхронного электродвигателя снижается.

При этом необходимо учитывать еще один нюанс, который связан с охлаждением электродвигателя. Нужно обязательно уточнить у поставщика, будет ли электродвигатель перегреваться при длительной работе на малых оборотах.
Дело в том, что если двигатель охлаждается за счет крыльчатки, закрепленной на его валу, то на малых скоростях вы столкнетесь с низкой скоростью охлаждающего двигатель потока воздуха.
Если асинхронный электродвигатель работает на низкой скорости и в течение длительного времени используется с большим крутящим моментом, то он будет выделять много тепла — при таких условиях, возможно, придется остановить свой выбор на двигателе с иным методом охлаждения.
Например, для организации принудительного охлаждения можно применить воздуходувное устройство, имеющее собственный, отдельно управляемый двигатель.
Производительность такого устройства не связана с системой управления электропривода.
В этом случае воздушный поток, который обдувает мощный электродвигатель, будет постоянным и достаточным для его охлаждения при низкой или даже при нулевой скорости.
Связь мощности и крутящего момента
При выборе асинхронного электродвигателя еще одним важным аспектом является номинальная, или основная, скорость двигателя. Обычно используются двухполюсные (3600 об/мин) и четырехполюсные (1800 об/мин) электродвигатели.
Однако имеются и коммерчески доступные 6-, 8- и 12-полюсные асинхронные электродвигатели со скоростью вращения ротора 1200, 900
и 600 об/мин соответственно.
Номинальная скорость асинхронного электродвигателя напрямую связана с числом полюсов, которые такой двигатель конструктивно содержит (табл.), и определяется по следующей формуле:
Об/мин = (120 × частота) / N (число полюсов)
В качестве примечания необходимо отметить, что, хотя прямой связи здесь нет, но, как правило, с увеличением количества полюсов возрастают и размеры, а также стоимость электропривода.
Кроме того, пользователям электроприводов, в зависимости от области применения данных устройств, может понадобиться обеспечить необходимый крутящий момент путем изменения скорости. В целом по мере увеличения скорости двигателя крутящий момент уменьшается, что также относится к редукторам и цепным приводам. Это соотношение объясняется следующим уравнением:
мощность (л. с.) = (крутящий момент × × номинальная скорость) / 5252
Крутящий момент, в соответствии с заданной целью, может быть достигнут путем выбора электродвигателя с необходимой мощностью и номинальной скоростью и реализован через любую цепную, ременную передачу или редуктор. Такой подход снижает стоимость привода, его габаритные размеры и время, уходящее на замену его подвижных заменяемых частей в ходе выполнения ремонта или технического обслуживания.
Таблица. Связь между числом полюсов, скоростью (об/мин) и крутящим моментом асинхронного электродвигателя
| Число полюсов, N | Скорость, об/мин |
Крутящий момент, л. с. / фут-фунт |
| 2 | 3600 | 1,46 |
| 4 | 1800 | 2,92 |
| 6 | 1200 | 4,38 |
| 8 | 900 | 5,84 |
| 10 | 720 | 7,29 |
| 12 | 600 | 8,75 |
Примечание. Как правило, увеличение числа полюсов приводит к увеличению габаритов, а следовательно, и к повышению стоимости привода на основе асинхронного электродвигателя
Как определить мощность и обороты электродвигателя без бирки?
При замене сломанного советского электродвигателя на новый, часто оказывается, что на нем нет шильдика. Нам часто задают вопросы: как узнать мощность электродвигателя? Как определить обороты двигателя? В этой статье мы рассмотрим, как определить параметры электродвигателя без бирки — по диаметру вала, размерам, току.
Как определить мощность?
Существует несколько способов определения мощности электродвигателя: диаметру вала, по габариту и длине, по току и сопротивлению, замеру счетчиком электроэнергии.
По габаритным размерам
Все электродвигатели отличаются по габаритным размерам. Определить мощность двигателя можно сравнив габаритные размеры с таблицей определения мощности электродвигателя, перейдя по ссылке габаритно-присоединительные размеры электродвигателей АИР.
- Длина, ширина, высота корпуса
- Расстояние от центра вала до пола
- Длина и диаметр вала
- Крепежные размеры по лапам (фланцу)
По диаметру вала
Определение мощности электродвигателя по диаметру вала — частый запрос для поисковых систем. Но для точного определения этого параметра недостаточно – два двигателя в одном габарите, с одинаковыми валами и частотой вращения могут иметь различную мощность.
Таблица с привязкой диаметров валов к мощности и оборотам для двигателей АИР и 4АМ.
| Мощность электродвигателя Р, кВт | Диаметр вала, мм | Переход к модели | |||
| 3000 об/мин | 1500 об/мин | 1000 об/мин | 750 об/мин | ||
| 0,18 | 11 | 11 | 14 | — | АИР56А2, АИР56В4, АИР63А6 |
| 0,25 | 14 | 19 | АИР56В2, АИР63А4, АИР63В6, АИР71В8 | ||
| 0,37 | 14 | 19 | 22 | АИР63А2, АИР63В4, АИР71А6, АИР80А8 | |
| 0,55 | 19 | АИР63В2, АИР71А4, АИР71В6, АИР80В8 | |||
| 0,75 | 19 | 22 | 24 | АИР71А2, АИР71В4, АИР80А6, АИР90LA8 | |
| 1,1 | 22 | АИР71В2, АИР80А4, АИР80В6, АИР90LB8 | |||
| 1,5 | 22 | 24 | 28 | АИР80А2, АИР80В4, АИР90L6, АИР100L8 | |
| 2,2 | 24 | 28 | 32 | АИР80В2, АИР90L4, АИР100L6, АИР112МА8 | |
| 3 | 24 | 32 | АИР90L2, АИР100S4, АИР112МА6, АИР112МВ8 | ||
| 4 | 28 | 28 | 38 | АИР100S2, АИР100L4, АИР112МВ6, АИР132S8 | |
| 5,5 | 32 | 38 | АИР100L2, АИР112М4, АИР132S6, АИР132М8 | ||
| 7,5 | 32 | 38 | 48 | АИР112M2, АИР132S4, АИР132М6, АИР160S8 | |
| 11 | 38 | 48 | АИР132M2, АИР132М4, АИР160S6, АИР160М8 | ||
| 15 | 42 | 48 | 55 | АИР160S2, АИР160S4, АИР160М6, АИР180М8 | |
| 18,5 | 55 | 60 | АИР160M2, АИР160M4, АИР180М6, АИР200М8 | ||
| 22 | 48 | 55 | 60 | АИР180S2, АИР180S4, АИР200М6, АИР200L8 | |
| 30 | 65 | АИР180M2, АИР180M4, АИР200L6, АИР225М8 | |||
| 37 | 55 | 60 | 65 | 75 | АИР200M2, АИР200M4, АИР225М6, АИР250S8 |
| 45 | 75 | 75 | АИР200L2, АИР200L4, АИР250S6, АИР250M8 | ||
| 55 | 65 | 80 | АИР225M2, АИР225M4, АИР250M6, АИР280S8 | ||
| 75 | 65 | 75 | 80 | АИР250S2, АИР250S4, АИР280S6, АИР280M8 | |
| 90 | 90 | АИР250М2, АИР250M4, АИР280M6, АИР315S8 | |||
| 110 | 70 | 80 | 90 | АИР280S2, АИР280S4, АИР315S6, АИР315M8 | |
| 132 | 100 | АИР280M2, АИР280M4, АИР315M6, АИР355S8 | |||
| 160 | 75 | 90 | 100 | АИР315S2, АИР315S4, АИР355S6 | |
| 200 | АИР315M2, АИР315M4, АИР355M6 | ||||
| 250 | 85 | 100 | АИР355S2, АИР355S4 | ||
| 315 | — | АИР355M2, АИР355M4 |
По показанию счетчика
Как правило измерение счетчика отображаются в киловаттах (далее кВт). Для точности измерения стоит отключить все электроприборы или воспользоваться портативным счетчиком. Мощность электродвигателя 2,2 кВт, подразумевает что он потребляет 2,2 кВт электроэнергии в час.
Для измерения мощности по показанию счетчика нужно:
- Подключить мотор и дать ему поработать в течении 6 минут.
- Замеры счетчика умножить на 10 – получаем точную мощность электромотора.
Расчет мощности по току
- P – мощность электродвигателя;
- U – напряжение;
- Ia – ток 1 фазы;
- Ib – 2 фазы;
- Ic – 3 фазы.
Определение оборотов вала
Асинхронные трехфазные двигатели по частоте вращения ротора делятся 4 типа: 3000, 1500, 1000 и 750 об. мин. Приводим пример маркировки на основании АИР 180:
Самый простой способ определить количество оборотов трехфазного асинхронного электродвигателя – снять задний кожух и посмотреть обмотку статора.
У двигателя на 3000 об/мин катушка обмотки статора занимает половину окружности — 180 °, то есть начало и конец секции параллельны друг другу и перпендикулярны центру. У электромоторов 1500 оборотов угол равен 120 °, у 1000 – 90 °. Схематический вид катушек изображен на чертеже. Все обмоточные данные двигателей смотрите в таблице.
Узнать частоту вращения с помощью амперметра
Узнать обороты вала двигателя, можно посчитав количество полюсов. Для этого нам понадобится миллиамперметр — подключаем измерительный прибор к обмотке статора. При вращении вала двигателя стрелка амперметра будет отклонятся. Число отклонений стрелки за один оборот – равно количеству полюсов.
Если не получилось узнать мощность и обороты
Если не получилось узнать мощность и обороты электродвигатели или вы не уверены в измерениях – обращайтесь к специалистам «Систем Качества». Наши специалисты помогут подобрать нужный мотор или провести ремонт сломанного электродвигателя АИР.
При рассмотрении вопроса о получении переменного тока указывают, что за один оборот ротора индуктированная в проводниках обмотки генератора электродвижущая сила (ЭДС) имела один период. Если ротор генератора делает, например 5 об/сек, то ЭДС будет иметь 5 пер/сек или частота тока генератора будет равна 5 Гц. Следовательно, число оборотов в секунду ротора генератора численно равно частоте тока.
Частота тока f выражается следующим соотношением:
![]()
где n – число оборотов ротора в минуту.
Для получения от генератора стандартной частоты тока – 50 Гц ротор должен делать 3000 об/мин, то есть
![]()
Однако наши рассуждения были справедливы только для двухполюсного генератора, то есть для машины с одной парой полюсов p.
Если машина четырехполюсная, то есть число пар полюсов равно двум: p = 2 (рисунок 1), то один полный период изменения тока будет иметь место за пол-оборота ротора (1 – 5 положения проводника на чертеже). За второй полуоборот ротора ток будет иметь еще один период. Следовательно, за один оборот ротора четырехполюсной машины ток в проводнике имеет два периода. В шестиполюсной машине (p = 3) ток в проводнике за один оборот ротора будет иметь три периода.

Рисунок 1. Изменение переменного тока в проводнике ротора четырехполюсного генератора
Таким образом, для машин, имеющих p пар полюсов, частота тока при ![]() об/сек будет в p раз больше, чем для двухполюсной машины, то есть
об/сек будет в p раз больше, чем для двухполюсной машины, то есть
![]()
Отсюда формула зависимости скорости вращения от частоты и числа пар полюсов будет иметь следующий вид:
![]()
Пример 1. Определить частоту переменного тока, получаемого от генератора с восемью полюсами (p = 4), скорость вращения ротора которого n = 750 об/мин. Подставляя в формулу для определения частоты тока значение p и n получим:
![]()
Пример 2. Определить скорость вращения ротора двадцатиполюсного генератора (p = 10), если частотомер показал частоту тока f = 25 Гц. Подставляя в формулу для определения числа оборотов ротора n значения p и f, получим:
![]()
Пример 3. Скорость вращения ротора асинхронного двигателя, составляет 250 об/мин. Определить число пар полюсов асинхронного двигателя, если частота тока питающей сети равна 50 Гц:
![]()
Следовательно, двигатель имеет 24 полюса.
Источник: Кузнецов М. И., «Основы электротехники» — 9-е издание, исправленное — Москва: Высшая школа, 1964 — 560 с.
Скорость вращения ротора асинхронного двигателя
Скорость вращения магнитного поля двигателя (синхронная скорость):
- n = 60f / p [об/мин]
Где:
- p — число пар полюсов двигателя;
- f — частота сети (50 Гц);
Скорость вращения двигателя онлайн калькулятор
Число пар полюсов двигателя:
Скорость вращения магнитного поля двигателя
:
Скорость вращения ротора асинхронного двигателя меньше скорости вращения магнитного поля:
n2 = n1(1 — s),
Где:
- s — скольжение.
Поделиться в соц сетях:
Популярные сообщения из этого блога
Найти тангенс фи , если известен косинус фи
Калькулятор коэффициент мощности cos fi в tg fi Как найти тангенс фи, если известен косинус фи формула: tg φ = (√(1-cos²φ))/cos φ Калькулятор онлайн — косинус в тангенс cos φ: tg φ: Поделиться в соц сетях: Найти синус φ, если известен тангенс φ Найти косинус φ, если известен тангенс φ
Индекс Руфье калькулятор
Проба Руфье калькулятор онлайн. Первые упоминания теста относиться к 1950 году. Именно в это время мы находим первое упоминание доктора Диксона о «Использование сердечного индекса Руфье в медико-спортивном контроле». Проба Руфье — представляет собой нагрузочный комплекс, предназначенный для оценки работоспособности сердца при физической нагрузке. Индекс Руфье для школьников и студентов. У испытуемого, находящегося в положении лежа на спине в течение 5 мин, определяют число пульсаций за 15 сек (P1); После чего в течение 45 сек испытуемый выполняет 30 приседаний. После окончания нагрузки испытуемый ложится, и у него вновь подсчитывается число пульсаций за первые 15 с (Р2); И в завершении за последние 15 сек первой минуты периода восстановления (Р3); Оценку работоспособности сердца производят по формуле: Индекс Руфье = (4(P1+P2+P3)-200)/10; Индекс Руфье для спортсменов Измеряют пульс в положении сидя (Р1); Спортсмен выполняет 30 глубоких приседаний в
Найти косинус фи (cos φ), через тангенс фи (tg φ)
tg фи=… чему равен cos фи? Как перевести тангенс в косинус формула: cos(a)=(+-)1/sqrt(1+(tg(a))^2) Косинус через тангенс, перевести tg в cos, калькулятор — онлайн tg φ: cos φ: ± Поделиться в соц сетях: