-
Передаточные функции разомкнутых и замкнутых сау
При анализе САУ в результате структурных
преобразований, чаще всего стремятся
получить одноконтурную САУ, так как
методы анализа и синтеза подобных систем
разработаны наиболее полно. Рассмотрим
простейшую одноконтурную САР (рисунок
4.6, а). Она представляет собой систему с
главной отрицательной обратной связью.
Произведем размыкание системы в точке
«А».
Передаточной функцией разомкнутой
системы Wp(p)называется
отношение изображения по Лапласу сигнала
обратной связи к изображению по Лапласу
сигнала ошибки при нулевых начальных
условиях, т.е.
![]() (4.14)
(4.14)
Следует иметь в виду, что для разомкнутой
системы X(t)=X(t)и все возмущающие воздействия считаются
равными нулю.
Таким образом, передаточная функция
разомкнутой системы равна произведению
передаточных функций отдельных звеньев
разомкнутого контура, включая передаточную
функцию элемента обратной связи.

Рисунок 4.6
Преобразования одноконтурной САУ
При анализе САУ, особенно следящих,
возникает необходимость анализа
поведения ошибки управления. Для этого
составляют передаточную функцию
относительно ошибки управления.
Передаточной функцией замкнутой системы
по ошибке регулирования называется
отношение изображения по Лапласу ошибки
регулирования к изображению по Лапласу
управляющего воздействия. Ошибка
регулирования в САР выявляется после
узла сравнения. Если выходной величиной
САР считать ошибку регулирования X(t),
а входной — управляющее воздействиеX(t), то структурная схема примет вид,
показанный на рисунке 4.6, б.
Пользуясь правилами преобразования,
получим передаточную функцию для ошибки
воспроизведения управляющего воздействия.
![]() , (4.15)
, (4.15)
Аналогично можно написать передаточную
функцию и для любой координаты САР,
например Y2(t).
Из структурной схемы (рисунок 4.6, в),
считая Y2(t)выходной
величиной, получим
![]() , (4.16)
, (4.16)
Рассмотрим случай, когда к САУ приложено
несколько возмущающих воздействий
(рисунок 4.7, а). Как было показано ранее,
каждому возмущающему воздействию
соответствует передаточная функция,
причем все остальные возмущения и
управляющие воздействия полагаются
равными нулю. Составим передаточную
функцию относительно возмущения f1(t)(рисунок 4.7, б). Из структурной схемы
следует
![]() , (4.17)
, (4.17)
Из выражения (4.17) следует, что передаточная
функция замкнутой САУ по данному
возмущению равна дроби, в числителе
которой передаточная функция прямого
канала от точки приложения возмущения
до выходной величины, а в знаменателе
— единица плюс передаточная функция
разомкнутой системы.
Согласно принципу суперпозиции, реакция
выходной величины определяется как
сумма реакций от каждого из воздействий,
т.е.
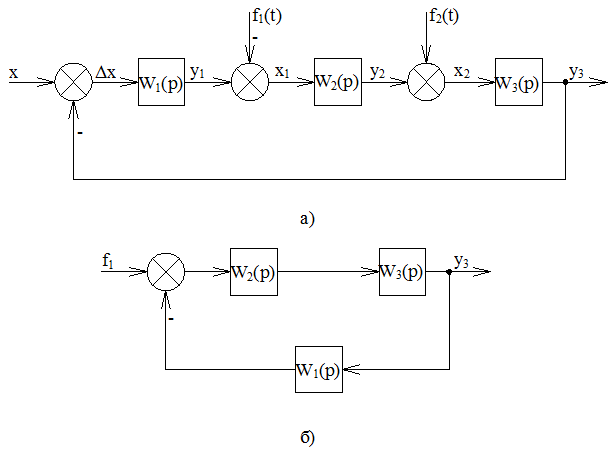
Рисунок
4.7 Одноконтурная САУ при приложении
нескольких воздействий
![]() ,
,
(4.18)
где
![]() ;
;
![]() ;
;
W1(p),W2(p),W3(p)— передаточные функции прямых цепей
элементов, заключенных между точками
приложения воздействий и выходной
величиной.
Известно, что при исследовании свободного
движения САУ оперируют характеристическим
уравнением системы. Найдем характеристические
полиномы разомкнутой и замкнутой САУ.
Для разомкнутой системы можно записать
уравнение:
![]() , (4.19)
, (4.19)
где Dp(p)— характеристичекий
полином разомкнутой системы.
Для замкнутой системы получим:
![]() , (4.20)
, (4.20)
Пусть
![]() ,
,
тогда характеристическое уравнение
замкнутой системы
![]() , (4.21)
, (4.21)
или
![]() , (4.22)
, (4.22)
Таким образом, характеристическое
уравнение замкнутой САУ при отрицательной
обратной связи равно сумме характеристических
полиномов левой и правой части уравнения
разомкнутой системы.
Рассмотрим пример преобразований САУ
к виду, удобному для анализа.
Система управления имеет два внутренних
контура и один внешний. Внешний контур
регулирования содержит обратную связь
по скорости двигателя. Эта связь
называется главной обратной связью, и
поэтому система называется системой
автоматического регулирования скорости.
Соответственно, устройство, обеспечивающее
поддержание заданного алгоритма
функционирования, называется регулятором
скорости.
Внутренние контуры регулирования
являются вспомогательными и предназначены
для улучшения характеристики объекта
управления и поддержания промежуточных
координат САР в заданных пределах с
целью компенсации вредного влияния
внутренних возмущений и инерционностей
системы.
В данном случае имеем два внутренних
контура — контур напряжения и контур
тока. Подробно принципы построения
таких систем будут рассмотрены в курсе
«Автоматическое управления
электроприводами», поэтому мы остановимся
лишь на вопросах, связанных с преобразованием
таких структурных схем. Рассмотрим
каждый контур в отдельности.
Контур напряжения включает в себя:
регулятор напряжения (РН), тиристорный
возбудитель, генератор с передаточными
функциями:
![]() ; (4.23)
; (4.23)
![]() ; (4.24)
; (4.24)
![]() . (4.25)
. (4.25)
При анализе такие системы, как правило,
приводят к единичной обратной связи
так, как это показано на рисунке 4.8, а.
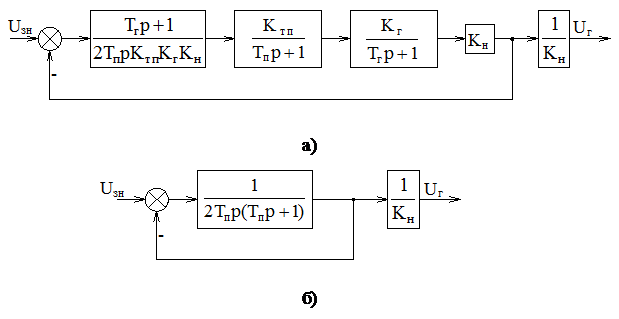
Рисунок 4.8 Структурные
схемы контура напряжения
Учитывая (4.23) и правило последовательного
соединения звеньев, структурная схема
(рисунок 4.8, б) может быть представлена
одним эквивалентным звеном с передаточной
функцией
![]() , (4.26)
, (4.26)
Управляющим воздействием для контура
тока является сигнал задания тока
двигателя Uзт,
а выходной величиной ток двигателя.
Регулятор тока имеет передаточную
функцию
 , (4.27)
, (4.27)
С учетом (4.26), (4.27) структурная схема
контура тока приведенного к единичной
обратной связи представлена на (рисунке
4.9, а).
Такая структурная схема получена при
условии, что Тм>>Тэ.
В этом случае пренебрегают обратной
связью по ЭДС двигателя т.е. полагают,
чтоE=KE=0.
В результатеWк(p)=1.
После преобразования структурная схема
замкнутого контура тока примет вид,
показанный на (рисунок 4.9, б).
Этой структурной схеме может быть
поставлена в соответствие передаточная
функция замкнутого контура тока
 , (4.28)
, (4.28)
Учитывая, что замкнутый контур тока
является внутренним по отношению к
контуру скорости, и приводя к единичной
обратной связи, получим структурную
схему, изображенную на (рисунок 4.9, в). В
данном случае считаем, что передаточная
функция регулятора известна и имеет
вид
![]() , (4.29)
, (4.29)
Из структурной схемы видно, что к системе
прикладывается два воздействия —
управляющее Uвх(t)и
возмущающееIс(t).
ПолагаяUвх(t)=0,Iс(t)=0и размыкая обратную связь, получим
передаточную функцию разомкнутой
системы (рисунок 4.9, г)
![]() , (4.30)
, (4.30)
Передаточная функция по управляющему
воздействию
 , (4.31)
, (4.31)
Принимая за входную величину возмущающее
воздействие, получим структурную схему,
представленную на (рисунке 4.9, в).
Этой структурной схеме соответствует
передаточная функция по возмущающему
воздействию
 ,
,
(4.32)
Таким образом, мы получим структурные
схемы и передаточные функции (4.31), (4.32),
составленные относительно управляющего
и возмущающего воздействий.
Используя принцип суперпозиции, мы
можем записать выражение для определения
реакции системы при одновременном
приложении возмущающего и управляющего
воздействий.
 , (4.33)
, (4.33)
 Рисунок
Рисунок
4.9 Структурные преобразования САУ
Таким образом:
-
Применение аппарата структурных
преобразований позволяет значительно
упростить методики исследования САУ.
При этом необходимо иметь в виду, что
упрощение структурных схем ведет к
повышению порядка дифференциального
уравнения, описывающего поведение
координат САУ; -
Применение принципа суперпозиций
позволяет определить реакцию системы
при одновременном приложении нескольких
возмущающих и управляющих воздействий.
Исследования САУ могут проводиться
отдельно для любого из воздействий. В
этом случае принимают, что остальные
воздействия равны нулю; -
При исследовании многоконтурных САУ,
имеющих внутренние автономные контуры,
каждый контур исследуется отдельно,
начиная с внутреннего; -
В большинстве случаев при исследовании
САУ последние приводятся к простейшим
одноконтурным системам с единичной
обратной связью.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Методические указания к практическим занятиям
Оглавление.
1.
Задание на расчет……………………………………………………..3
2.
Передаточная
функция разомкнутой системы………………………4
3.
Передаточная
функция замкнутой системы…………………………4
4.
Дифференциальное
уравнение системы…………………………….4
5.
Структурная схема
замкнутой системы…………………………….5
6.
АЧХ системы…………………………………………………………5
7.
ФЧХ системы…………………………………………………………6
8.
АФХ
системы…………………………………………………………7
9.
Переходная
характеристика…………………………………………9
10. Весовая функция ……………………………………………………10
11. Асимптотическую ЛАЧХ и ЛФЧХ………………………………..11
12. Анализ устойчивости системы методом
Рауса – Гурвица……….13
13. Анализ устойчивости системы методом
Михайлова…………….14
14. Анализ устойчивости системы методом
Найквиста……………..16
15. Анализ устойчивости системы при
помощи ЛАЧХ и ЛФЧХ……17
16. Запас устойчивости…………………………………………………20
Задание на расчет:
По заданным нулю и пяти полюсам передаточной функции
разомкнутой системы автоматического регулирования выполнить следующие задания:
· Записать функцию разомкнутой системы
· Записать функцию замкнутой системы
· Записать дифференциальное уравнение
системы
· Начертить структурную схему замкнутой
системы
· Определить АЧХ системы
· Определить ФЧХ системы
· Построить АФХ
· Определить переходную характеристику
· Определить весовую функцию
· Построить асимптотическую ЛАЧХ и ЛФЧХ
· Проанализировать устойчивость системы
методом Рауса – Гурвица
· Проанализировать устойчивость системы
методом Михайлова
· Проанализировать устойчивость системы
методом Найквиста
· Проанализировать устойчивость системы
при помощи ЛАЧХ и ЛФЧХ
· Определить запас устойчивости
2. Запишем передаточную функцию разомкнутой системы:
 ,
,
Подставив значения корней и полюсов, получим:
 , раскрывая скобки:
, раскрывая скобки:
 .
.
3. Запишем передаточную функцию для замкнутой системы:
Переход от разомкнутой системы к замкнутой осуществим по
формуле:  или
или  ,
,
подставляя передаточную функцию разомкнутой системы, получим:
 , или
, или
 .
.
4. Запишем дифференциальное уравнение для замкнутой системы:
Передаточную функцию можно представить как отклик ![]() на воздействие
на воздействие ![]() , при
, при
этом оператор  , учитывая вышесказанное, запишем
, учитывая вышесказанное, запишем
дифференциальное уравнение:
 .
.
5. Нарисуем структурную схему замкнутой системы:
Структурная схема замкнутой системы представляет собой
разомкнутую систему, охваченную отрицательной обратной связью. Разомкнутая
система представляет собой каскадное соединение различных звеньев. Учитывая
вышесказанное, нарисуем структурную схему замкнутой системы:
 .
.
Структурная схема:

Где ![]() — форсирующее звено;
— форсирующее звено;
 и
и  —
—
апериодические звенья 1-го порядка;
 — колебательное звено 2-го
— колебательное звено 2-го
порядка;
![]() — идеальное интегрирующее звено.
— идеальное интегрирующее звено.
6. Амплитудно-частотная характеристика системы:
Передаточная функция системы в частотной области может быть
получена заменой ![]() на
на ![]() :
:

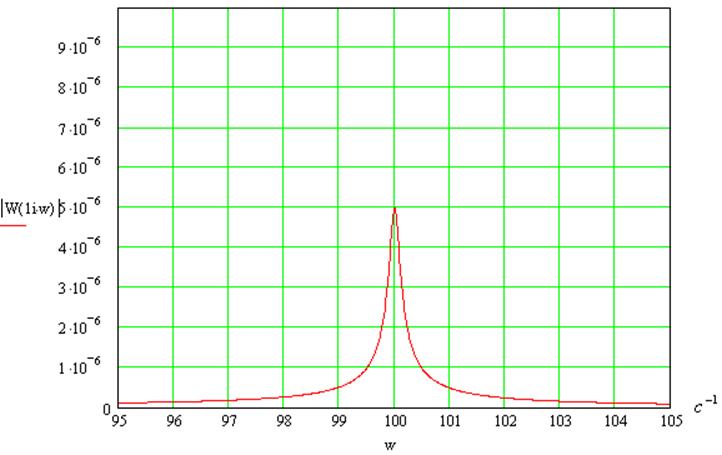
Тогда

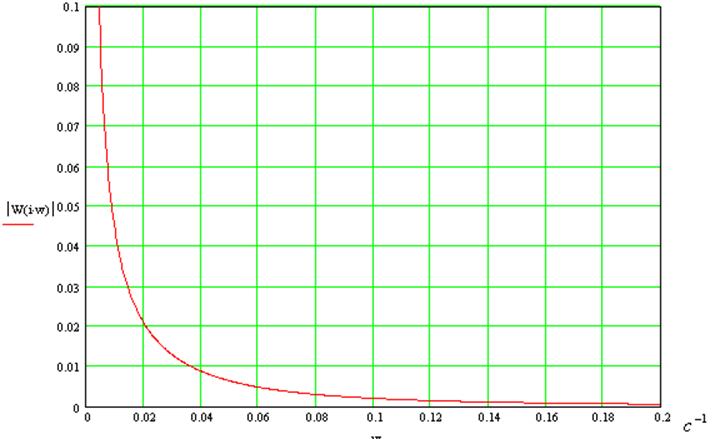
В области резонанса:
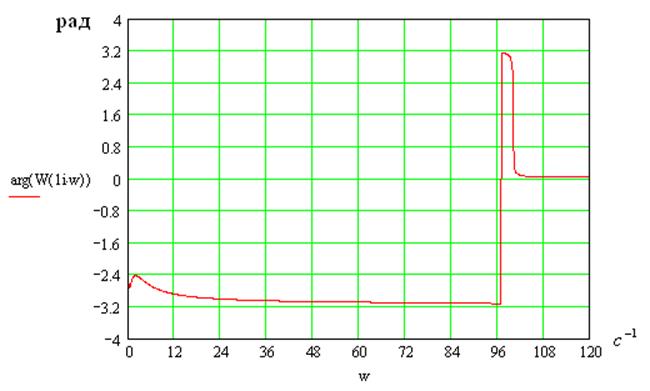
7. Фазо-частотная характеристика системы
 [рад]
[рад]
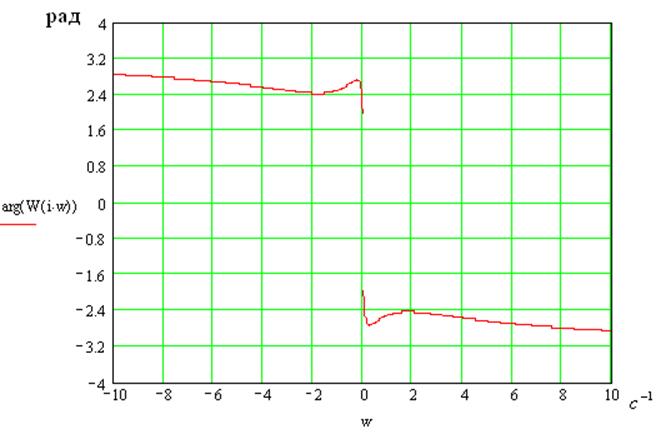
В области резонанса:
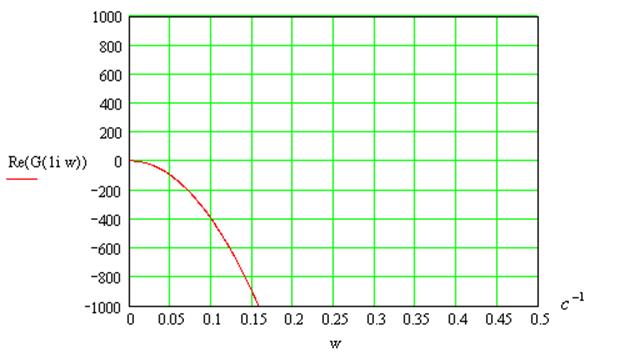
8. Амплитудно-фазовая характеристика системы:
Найдем реальную и мнимую части передаточной функции. Домножим
числитель и знаменатель на комплексно сопряженное выражение
![]() , получим:
, получим:
 :
:
 :
:
АФХ:
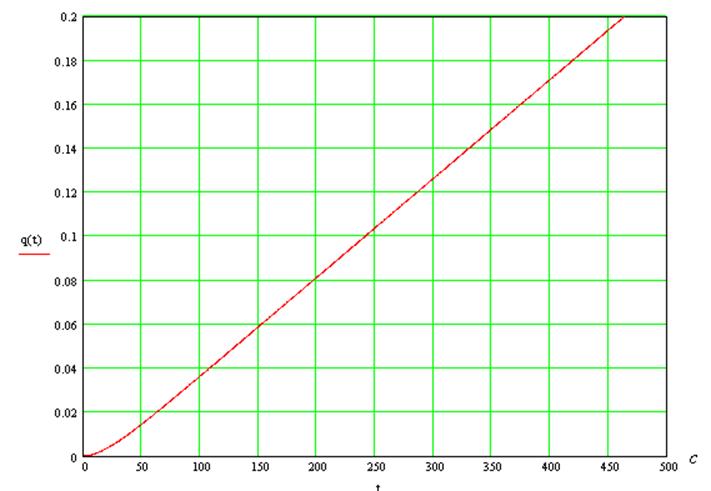
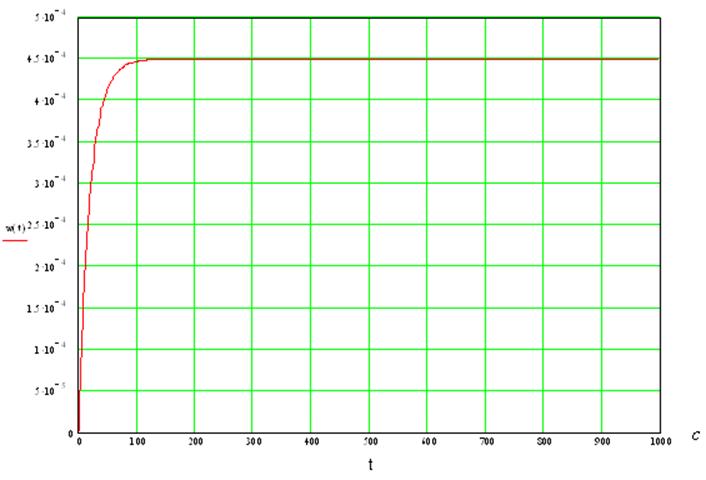
9. Определим переходную характеристику системы:
Переходная характеристика может быть выражена через
передаточную функцию системы следующим образом:
 , найдя оригинал от
, найдя оригинал от  , получим:
, получим:
![]()
10. Определим весовую функцию, которая может быть выражена
через передаточную функцию следующим образом:
![]()
![]()
11. Найти и построить асимптотическую ЛАЧХ и ЛФЧХ:
ЛАЧХ:
![]()
, запишем в другом виде:
 — колебательное звено 2-го
— колебательное звено 2-го
порядка.
![]() ;
;
 ;
;
 ;
;
 .
.
Сопрягающие частоты:
![]() ,
, ![]() ,
, ![]() ,
, ![]() ;
;
Тогда асимптотическую ЛАЧХ можно разбить на следующие
интервалы:
При ![]() :
:
 ;
;
При ![]() :
:
 ;
;
При ![]() :
:
 ;
;
При: ![]()
 ;
;
При ![]() :
:
 ;
;
График асимптотической ЛАЧХ:
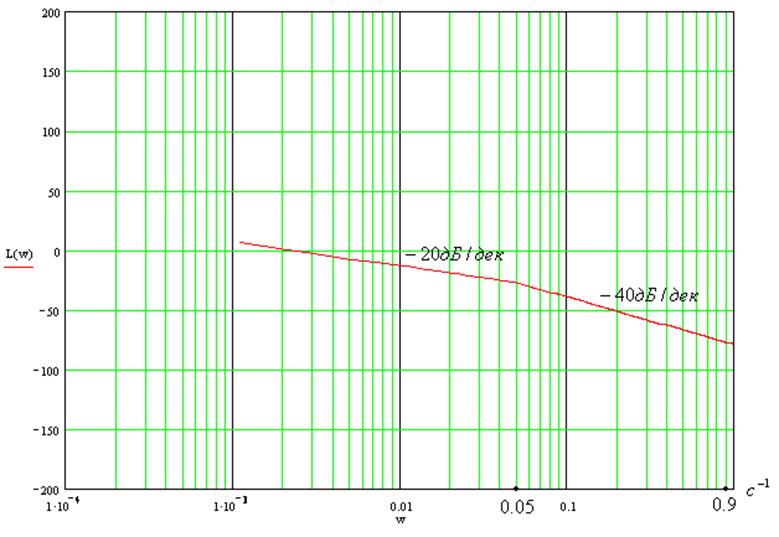
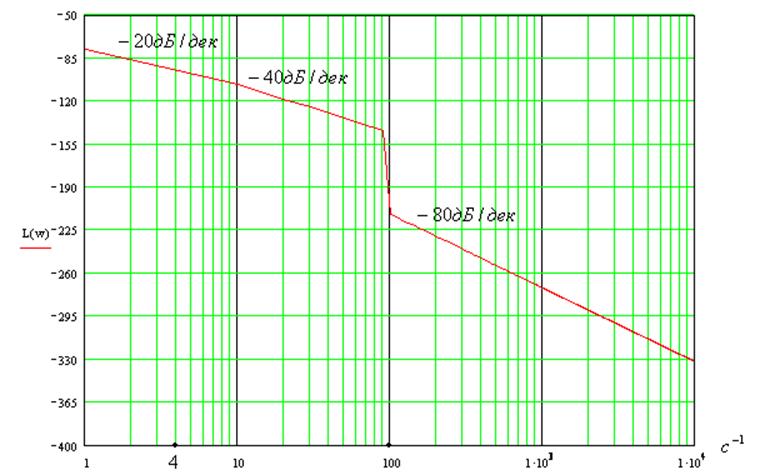
График ЛФЧХ:
 12.
12.
Проанализируем устойчивость системы методом Рауса — Гурвица:
Для того чтобы система автоматического управления была
устойчива, необходимо и достаточно, чтобы все определители Гурвица имели знаки,
одинаковые со знаком первого коэффициента характеристического уравнения а0,
т. е. при а0> 0 были положительными.
Рассчитаем определители, если характеристическое уравнение
системы
![]() , тогда:
, тогда:
![]() ;
;
 ;
;
 ;
;
![]()
Так как все определители положительны, система устойчива.
13. Проанализируем устойчивость системы методом Михайлова:
Для того чтобы система автоматического управления была
устойчива, необходимо и достаточно, чтобы кривая (годограф) Михайлова при
изменении частоты ![]() от 0 до
от 0 до ![]() ,
,
начинаясь при ![]() на вещественной положительной
на вещественной положительной
полуоси, обходила только против часовой стрелки последовательно п квадрантов
координатной плоскости, где п — порядок характеристического уравнения.
Годограф Михайлова:
![]()
![]()
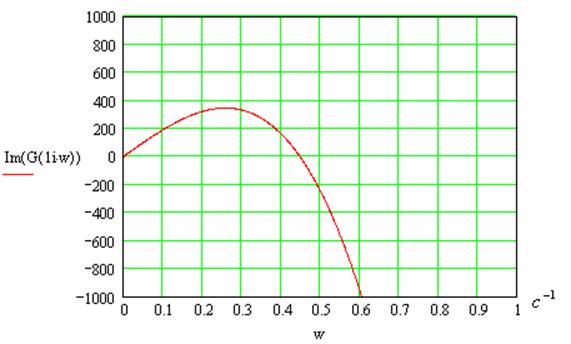
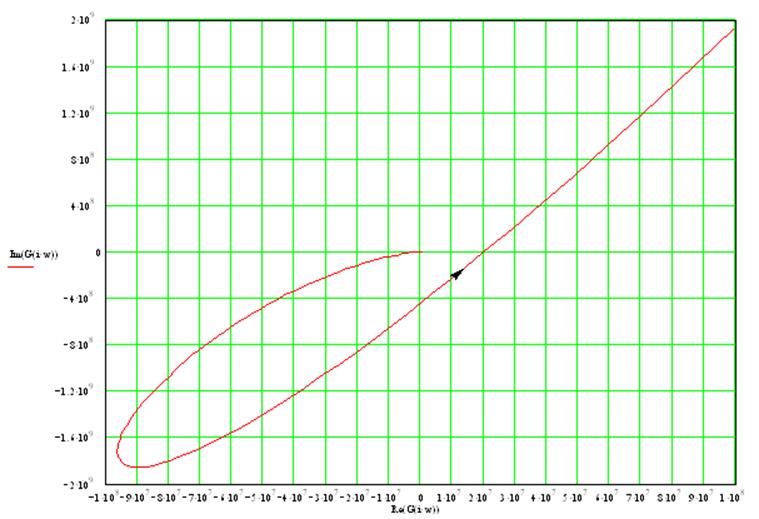
Вектор совершает поворот на 5 квадрантов, следовательно, система
устойчива.
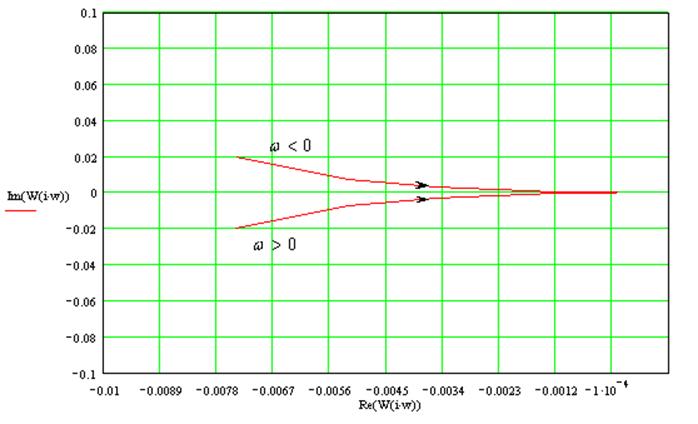
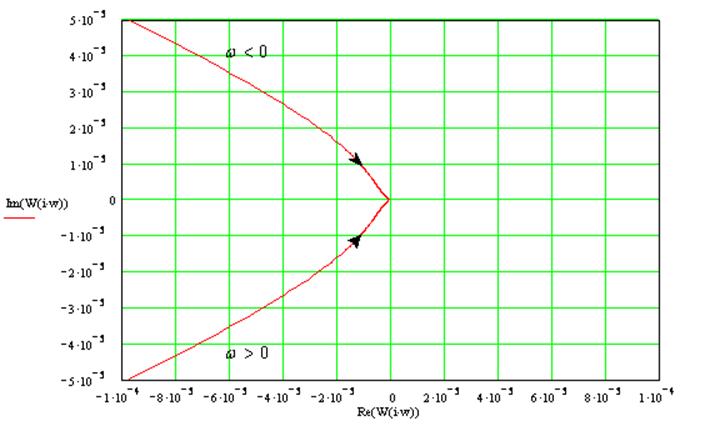
14. Проанализируем устойчивость системы методом Найквиста:
Для устойчивости астатической системы 1-го порядка необходимо
и достаточно, чтобы годограф разомкнутой системы не охватывал точку -1+j0.
;
Годограф разомкнутой системы:
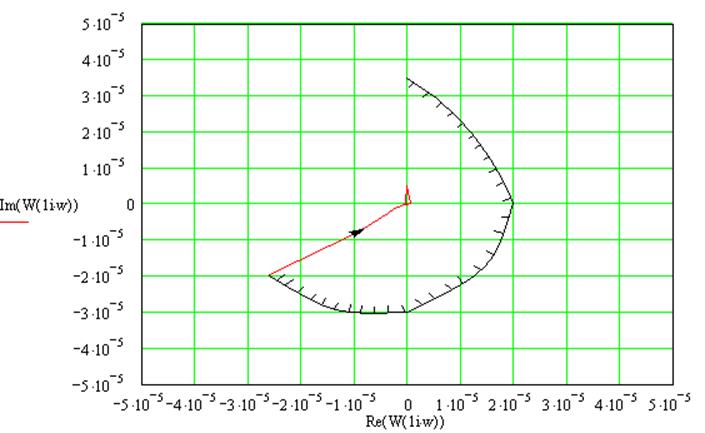
Годограф не охватывает точку -1+j0, следовательно, замкнутая система будет устойчива.
15. Анализ устойчивости по ЛАЧХ и ЛФЧХ:
Для устойчивости системы необходимо, чтобы число переходов
ЛФЧХ через ![]() при изменении
при изменении ![]() от 0 до
от 0 до
![]() было четным, при условии, что ЛФЧХ
было четным, при условии, что ЛФЧХ
Связь передаточных функций и частотных характеристик разомкнутого и замкнутого контуров системы автоматического управления
Передаточные функции находят широкое применение при исследовании систем автоматического управления. Зная передаточную функцию, можно определить временные и частотные характеристики системы. Кроме того, можно определить и изменение регулируемой величины при приложении к системе воздействий произвольной формы.
В зависимости от того, рассматривается ли поведение системы при задающем или при возмущающем воздействии, различают передаточные функции системы по задающему и по возмущающему воздействиям. При этом различают передаточные функции разомкнутых и замкнутых систем.
Рассмотрим понятие передаточной функции системы по задающему воздействию.
Передаточной функцией системы по задающему воздействию называется отношение изображения по Лапласу выходной величины системы X(p)=L[x(t)] к изображению по Лапласу задающего воздействия G(p)=L[g(t)] при нулевых начальных условиях.
Передаточная функция замкнутой системы по задающему воздействию обозначается через Ф(р) и равна
 . (7.10)
. (7.10)
Передаточная функция разомкнутой системы по задающему воздействию обозначается через W(p) и равна
 , (7.11)
, (7.11)
где Xр(p) – изображение по Лапласу выходной величины разомкнутой системы при нулевых начальных условиях.
Передаточной функцией системы по возмущающему воздействию называется отношение изображения по Лапласу выходной величины системы к изображению по Лапласу возмущающего воздействия F(p)=L[f(t)] при нулевых начальных условиях.
Передаточная функция замкнутой системы по возмущающему воздействию обозначается через Ff(p) и равна
 . (7.12)
. (7.12)
Передаточная функция разомкнутой системы по возмущающему воздействию обозначается через V(p) и равна
 . (7.13)
. (7.13)
При определении передаточных функций разомкнутых систем имеется в виду, что рассматривается поведение системы, у которой главная отрицательная обратная связь разомкнута.
Кроме рассмотренных выше передаточных функций, при анализе систем автоматического регулирования очень часто используют передаточную функцию замкнутой системы по ошибке.
Передаточной функцией замкнутой системы по сигналу ошибки называется отношение изображения по Лапласу ошибки к изображению по Лапласу задающего воздействия при нулевых начальных условиях. Она равна
 , (7.14)
, (7.14)
где E(p)=L[e(t)] – изображение по Лапласу ошибки системы при нулевых начальных условиях.
Определим связь между передаточными функциями разомкнутой и замкнутой систем автоматического регулирования. Так как структурная схема любой сложной многоконтурной системы с одной регулируемой величиной методами структурных преобразований может быть приведена к схеме одноконтурной системы, то в общем случае структурная схема САУ может быть представлена так, как изображено на рис.7.5,а. Задающее воздействие g(t) приложено ко входу звена с передаточной функцией W1(p), а возмущающее воздействие f(t) действует на вход звена W2(p). Разомкнем систему, т.е. отключим выход звена W2(p) от сумматора. Структурная схема примет вид, изображенный на рис.7.5,б.
Пользуясь правилом структурных преобразований и применяя принцип суперпозиции, так как САУ является линейной, определим передаточные функции разомкнутой системы.
Передаточная функция разомкнутой системы по задающему воздействию при f(t)=0 будет равна
 , (7.15)
, (7.15)
а по возмущающему воздействию при g(t)=0 будет иметь вид
 . (7.16)
. (7.16)
Замкнем систему, т.е. вновь подключим выход звена W2(p) к сумматору (рис.7.5,а).

Рис.7.5. Преобразование структурной схемы САУ
Рассмотрим поведение системы при задающем воздействии и при f(t)=0. Тогда структурная схема САУ примет вид, как показано на рис.7.5,в, а передаточная функция замкнутой системы по задающему воздействию примет вид
 . (7.17)
. (7.17)
Определим выражение для передаточной функции замкнутой системы по ошибке. Поведение системы рассматривается только при задающем воздействии, а выходной величиной системы является ошибка e (рис.7.5,г). Тогда передаточная функция замкнутой системы по ошибке равна
 . (7.18)
. (7.18)
Сравнивая выражения (7.17) и (7.18), можно записать
Полученные выражения (7.17), (7.18) устанавливают связь между передаточной функцией разомкнутой САУ и передаточными функциями замкнутой системы соответственно по задающему воздействию и по сигналу ошибки.
Рассмотрим поведение системы только при возмущающем воздействии, т.е. g(t)=0. Тогда структурная схема системы примет вид, изображенный на рис.7.5,д, а передаточная функция замкнутой системы по возмущающему воздействию будет
 . (7.19)
. (7.19)
Выражение (7.19) определяет связь между передаточной функцией замкнутой системы по возмущающему воздействию и передаточными функциями разомкнутой системы.
По передаточной функции разомкнутой системы по задающему воздействию можно определить характеристические полиномы и характеристические уравнения системы в разомкнутом и замкнутом состояниях. Передаточная функция W(p) может быть представлена как отношение двух многочленов:
 , (7.20)
, (7.20)
 (7.21)
(7.21)
Многочлен  является характеристическим полиномом разомкнутой системы. Таким образом, характеристическое уравнение разомкнутой системы можно получить из многочлена знаменателя передаточной функции W(p) (7.20), заменив переменную и приравняв полученное выражение к нулю, т.е. Dр(s)=0. Следовательно, характеристическое уравнение разомкнутой системы имеет вид:
является характеристическим полиномом разомкнутой системы. Таким образом, характеристическое уравнение разомкнутой системы можно получить из многочлена знаменателя передаточной функции W(p) (7.20), заменив переменную и приравняв полученное выражение к нулю, т.е. Dр(s)=0. Следовательно, характеристическое уравнение разомкнутой системы имеет вид:
 . (7.22)
. (7.22)
Аналогично может быть получено характеристическое уравнение замкнутой системы. Так как
 , (7.23)
, (7.23)
то, подставив выражение (7.20) в (7.23), получим
 . (7.24)
. (7.24)
Таким образом, характеристическое уравнение замкнутой системы будет иметь вид:
Выражение (7.26) показывает, что характеристическое уравнение замкнутой системы можно получить по передаточной функции разомкнутой системы. Для этого необходимо просуммировать многочлен числителя и знаменателя передаточной функции W(p), заменить переменную и полученное выражение приравнять к нулю.
Вполне очевидно, что характеристическое уравнение как замкнутой, так и разомкнутой систем имеет одну и ту же степень.
Из выражений (7.17), (7.18) и (7.19) видим, что знаменатели этих выражениий одинаковые. Поэтому характеристическое уравнение замкнутой системы может быть получено по любой из передаточных функций замкнутой системы.
Передаточная функция разомкнутой системы. Передаточная функция замкнутой системы. Дифференциальное уравнение системы
Страницы работы
Фрагмент текста работы
Методические указания к практическим занятиям
Оглавление.
2. Передаточная функция разомкнутой системы……………………. 4
3. Передаточная функция замкнутой системы………………………. 4
4. Дифференциальное уравнение системы…………………………….4
5. Структурная схема замкнутой системы…………………………….5
9. Переходная характеристика…………………………………………9
11. Асимптотическую ЛАЧХ и ЛФЧХ………………………………..11
12. Анализ устойчивости системы методом Рауса – Гурвица……….13
13. Анализ устойчивости системы методом Михайлова…………….14
14. Анализ устойчивости системы методом Найквиста……………..16
15. Анализ устойчивости системы при помощи ЛАЧХ и ЛФЧХ…. 17
16. Запас устойчивости……………………………………………. …20
По заданным нулю и пяти полюсам передаточной функции разомкнутой системы автоматического регулирования выполнить следующие задания:
· Записать функцию разомкнутой системы
· Записать функцию замкнутой системы
· Записать дифференциальное уравнение системы
· Начертить структурную схему замкнутой системы
· Определить АЧХ системы
· Определить ФЧХ системы
· Определить переходную характеристику
· Определить весовую функцию
· Построить асимптотическую ЛАЧХ и ЛФЧХ
· Проанализировать устойчивость системы методом Рауса – Гурвица
· Проанализировать устойчивость системы методом Михайлова
· Проанализировать устойчивость системы методом Найквиста
· Проанализировать устойчивость системы при помощи ЛАЧХ и ЛФЧХ
· Определить запас устойчивости
2. Запишем передаточную функцию разомкнутой системы:
,
Подставив значения корней и полюсов, получим:
, раскрывая скобки:
.
3. Запишем передаточную функцию для замкнутой системы:
Переход от разомкнутой системы к замкнутой осуществим по формуле: или , подставляя передаточную функцию разомкнутой системы, получим:
, или
.
4. Запишем дифференциальное уравнение для замкнутой системы:
Передаточную функцию можно представить как отклик на воздействие , при этом оператор , учитывая вышесказанное, запишем дифференциальное уравнение:
.
5. Нарисуем структурную схему замкнутой системы:
Структурная схема замкнутой системы представляет собой разомкнутую систему, охваченную отрицательной обратной связью. Разомкнутая система представляет собой каскадное соединение различных звеньев. Учитывая вышесказанное, нарисуем структурную схему замкнутой системы:
.
Где — форсирующее звено;
и — апериодические звенья 1-го порядка;
— колебательное звено 2-го порядка;
— идеальное интегрирующее звено.
6. Амплитудно-частотная характеристика системы:
Передаточная функция системы в частотной области может быть получена заменой на :
В области резонанса:
7. Фазо-частотная характеристика системы
[рад]
В области резонанса:
8. Амплитудно-фазовая характеристика системы:
Найдем реальную и мнимую части передаточной функции. Домножим числитель и знаменатель на комплексно сопряженное выражение
, получим:
:
:
9. Определим переходную характеристику системы:
Переходная характеристика может быть выражена через передаточную функцию системы следующим образом:
, найдя оригинал от , получим:
10. Определим весовую функцию, которая может быть выражена через передаточную функцию следующим образом:
11. Найти и построить асимптотическую ЛАЧХ и ЛФЧХ:
, запишем в другом виде:
— колебательное звено 2-го порядка.
;
;
;
.
, , , ;
Тогда асимптотическую ЛАЧХ можно разбить на следующие интервалы:
При :
;
При :
;
При :
;
При:
;
При :
;
График асимптотической ЛАЧХ:
12. Проанализируем устойчивость системы методом Рауса — Гурвица:
Для того чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы все определители Гурвица имели знаки, одинаковые со знаком первого коэффициента характеристического уравнения а0, т. е. при а0> 0 были положительными.
Рассчитаем определители, если характеристическое уравнение системы
, тогда:
;
;
;
Так как все определители положительны, система устойчива.
13. Проанализируем устойчивость системы методом Михайлова:
Для того чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы кривая (годограф) Михайлова при изменении частоты от 0 до , начинаясь при на вещественной положительной полуоси, обходила только против часовой стрелки последовательно п квадрантов координатной плоскости, где п — порядок характеристического уравнения.
Вектор совершает поворот на 5 квадрантов, следовательно, система устойчива.
14. Проанализируем устойчивость системы методом Найквиста:
Для устойчивости астатической системы 1-го порядка необходимо и достаточно, чтобы годограф разомкнутой системы не охватывал точку -1+j0.
;
Годограф разомкнутой системы:
Годограф не охватывает точку -1+j0, следовательно, замкнутая система будет устойчива.
15. Анализ устойчивости по ЛАЧХ и ЛФЧХ:
Для устойчивости системы необходимо, чтобы число переходов ЛФЧХ через при изменении от 0 до было четным, при условии, что ЛФЧХ
Передаточные функции систем автоматического управления
Записанные выше дифференциальные уравнения системы автоматического управления (5.4) и (5.6) могут быть получены также на основании понятия передаточной функции, которое было введено в главе 3. Рассмотрим рис. 5.1, где изображена замкнутая система автоматического управления.
Предположим вначале, что чувствительный элемент (ЧЭ) отсоединен от управляемого объекта (УО), и рассмотрим так называемую разомкнутую систему автоматического управления.
Управляющее воздействие, которое прикладывается к управляемому объекту, определяется выражением
— передаточная функция управляющего устройства, которая определяется из дифференциального уравнения управляющего устройства (5.2):
Управляемая величина может быть найдена из выражения
—
передаточная функция объекта по
Первая из них определяется из дифференциального уравнения объекта (5.1) при
Передаточную функцию разомкнутой системы можно определить как отношение изображений управляемой величины и ошибки при нулевых начальных значениях и возмущающих воздействиях, равных нулю:
— комплексная величина.
в разомкнутой системе:
— оператор дифференцирования.
Учитывая (5.13), формулу (5.15) можно также записать в виде
Передаточная функция разомкнутой системы имеет весьма большое значение в теории автоматического управления, так как многие методы анализа и синтеза основаны на использовании именно этой функции.
Решая (5.12) и (5.17) совместно, получаем для управляемой величины
называется передаточной функцией замкнутой системы. Она устанавливает связь между управляемой величиной и задающим воздействием при равенстве пулю возмущающих воздействий:
называют передаточной функцией замкнутой системы по ошибке. Оно дает связь
между ошибкой и задающим воздействием в замкнутой системе при равенстве нулю возмущающих воздействий:
при нулевых начальных условиях и отсутствии внешних возмущений:
также при пулевых начальных условиях и отсутствии внешних возмущений.
раз по сравнению с отклонением в разомкнутой системе (5.12).
когда цепь управления разорвана и автоматическое управление отсутствует.
представляет собой полином знаменателя передаточной функции замкнутой системы:
)
Он равен сумме полиномов числителя и знаменателя передаточной функции разомкнутой системы (5.13).
Приравнивание нулю характеристического полинома (5.24) дает характеристическое уравнение замкнутой системы;
Оно может быть записано в более удобной форме, которая непосредственно получается из (5.18) или (5.19):
Полином знаменателя передаточной функции разомкнутой системы С(р) представляет собой характеристический полином разомкнутой системы.
Из рассмотренного видно, что знание передаточной функции разомкнутой системы позволяет найти выражение для ошибки и управляемой величины в функции задающего и возмущающих воздействий, а также характеристическое уравнение системы.
Передаточная функция разомкнутой системы может находиться непосредственно по структурной схеме и передаточным функциям входящих в нее звеньев.
http://vunivere.ru/work63531
http://www.tehnoinfa.ru/teorijasistempravlenija/18.html