Содержание:
Взаимное пересечение поверхностей:
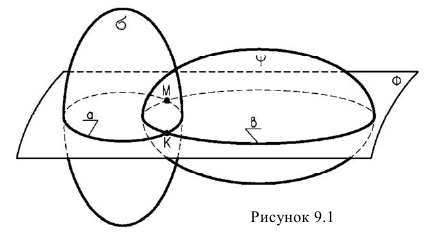
При пересечении поверхностей образуется линия, которую принято называть линией взаимного пересечения поверхностей. Эта линия пересечения принадлежит одновременно двум поверхностям. Поэтому построение линии пересечения сводится к определению точек одновременно принадлежащих обеим поверхностям. Для нахождения таких точек используется в общем случае метод вспомогательных секущих поверхностей. Сущность способа заключается в следующем: Пусть задано две поверхности 
Общий алгоритм построения линии пересечения поверхностей:
- Введем вспомогательную поверхность Ф.
- Строим линии пересечения поверхности Ф с поверхностями

- Определяем точки пересечения К и М, простроенных линий a и b
- Многократно повторяя эту операцию, найдем ряд точек, принадлежащих одновременно двум поверхностям.
- Соединяем последовательно точки с учетом видимости.

В качестве посредников могут быть приняты как поверхности, так и плоскости, но целесообразно выбирать такие, которые дают наиболее простые линии пересечения с заданными поверхностями.
Взаимное пересечение поверхностей
Линия, общая для двух пересекающихся поверхностей — линия пересечения.
Чтобы определить проекцию линии пересечения, необходимо найти проекции точек, общих для этих поверхностей. Их находят способом вспомогательных секущих плоскостей или вспомогательных сфер.
Если рёбра призмы или ось вращения цилиндра перпендикулярны какой-либо из плоскостей проекций, то на этой плоскости проекций линия пересечения совпадает с контуром основания призмы или цилиндра.
Пересечение двух многогранников
Для построения линии пересечения двух многогранников необходимо определить точки пересечения ребер первого многогранника с гранями второго, затем ребер второго с гранями первого. Полученные точки соединить отрезками прямой с учетом видимости. На рисунке 9.2 заданы поверхности трехгранной призмы DEFD’E’F’ и трехгранной пирамиды SABC. Так как призма F, фронтально-проецирующая, фронтальная проекция линии пересечения совпадает с гранями призмы, поэтому необходимо построить только горизонтальную проекцию. Для этого определяем точки пересечения ребер пирамиды с гранями призмы. Ребро SC пересекает грани призмы в точках I и 2, ребро SB — в точках 3 и 4, ребро SA не пересекает призму. Затем определяем точки пересечения ребер призмы с гранями пирамиды.
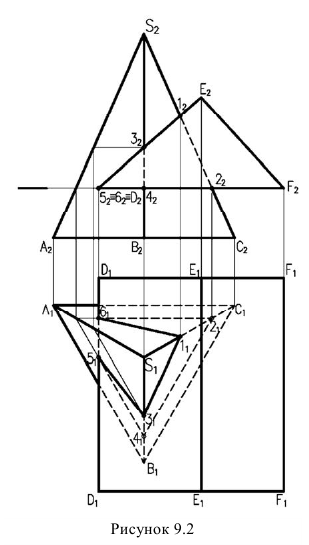
По чертежу видим, что только ребро DD’ пресекает поверхность пирамиды. Для определения точек пересечения 5 и б через ребро DD’ проводим горизонтальную плоскость, которая пересекает пирамиду по треугольнику. Точки 5 и 6 получаем, как пересечение DD’ с построенным треугольником.
Полученные точки соединяем с учетом видимости. Видимой считается тот отрезок прямой, который принадлежит двум видимым граням поверхностей.
Как видим, линия пересечения двух многогранников представляет собой пространственную ломаную линию.
В том случае, когда обе гранные поверхности общего положения, последовательность соединения точек вызывает затруднение. Поэтому для соединения точек используется диаграмма Ананова — условные развертки поверхностей (см. учебник).
Пересечение гранной и кривой поверхности
Линия пересечения гранной и кривой поверхности, представляет собой пространственную кривую линию, с точками излома на ребрах многогранника.
Поэтому сначала определяем точки пересечения ребер многогранника с кривой поверхностью, а затем промежуточные точки и соединяем их с учетом видимости. На рисунке 9.3 заданы поверхности трехгранной призмы и кругового конуса.
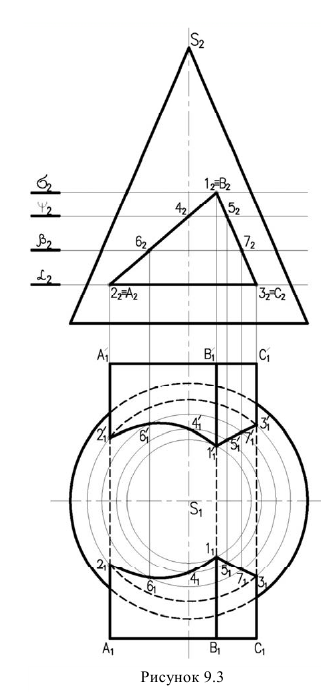
Так как призма фронтально-проецирующая, фронтальная проекция линии пересечения совпадает с проекцией боковых граней призмы, поэтому необходимо построить только горизонтальную проекцию линии пересечения.
Сначала определяем точки пересечения ребер призмы  с поверхностью конуса, а затем находим промежуточные точки, принадлежащие линиям пересечения. Для нахождения точек пересечения, используем горизонтальные плоскости посредники, так как они пересекают конус по окружностям, а призму но прямым линиям. Как видим, в данном случае линия пересечения распадается на две отдельные части.
с поверхностью конуса, а затем находим промежуточные точки, принадлежащие линиям пересечения. Для нахождения точек пересечения, используем горизонтальные плоскости посредники, так как они пересекают конус по окружностям, а призму но прямым линиям. Как видим, в данном случае линия пересечения распадается на две отдельные части.
Пересечение двух кривых поверхностей. Метод вспомогательных секущих плоскостей
Линия пересечения двух кривых поверхностей, представляет пространственную кривую линию. Поэтому для ее построения необходимо определить ряд точек принадлежащих этой лини.
На рисунке 9.4 заданы поверхности конуса и сферы. Точки строятся при помощи горизонтальных плоскостей посредников, которые рассекают обе поверхности но окружностям.
Обязательно находим опорные точки, к которым относятся высшая и низшая точки линии пересечения и точки границы видимости. Так как оси поверхностей лежат в одной фронтальной плоскости, контурные образующие поверхностей пересекаются в точках 1 и 2 — это и будет высшая и низшая точки. Точки границы видимости лежат на экваторе сферы, поэтому точки 3 и 3′ находим с помощью вспомогательной горизонтальной плоскости, проходящей через центр сферы. Она рассекает сферу по экватору, а конус но параллели радиуса R.
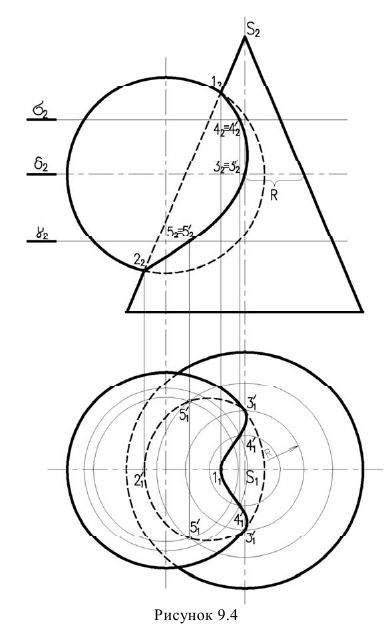
Взаимно пересекаясь, они и дают точки 3 и 3′ фронтальную проекцию определяем по вертикальной линии связи на плоскости  Затем берем еще две вспомогательные плоскости расположенные выше и ниже плоскости
Затем берем еще две вспомогательные плоскости расположенные выше и ниже плоскости  и выполняя, аналогичные построения определяем точки 4 и
и выполняя, аналогичные построения определяем точки 4 и  5 и 5′. Полученные точки соединяем с учетом видимости.
5 и 5′. Полученные точки соединяем с учетом видимости.
- Заказать чертежи
Пересечение поверхностей вращении. Метод вспомогательных секущих сфер
Способ вспомогательных секущих сфер применяется при следующих условиях:
- Пересекающиеся поверхности являются поверхностями вращения.
- Оси этих поверхностей пересекаются.
- Оси поверхностей параллельны одной из плоскостей проекций.
Перед рассмотрением этого способа разберем понятие соосных поверхностей. Соосными называются поверхности вращения, имеющие общую ось. Соосные поверхности пересекаются по окружностям перпендикулярным оси вращения.
На рисунке 9.5 приведены некоторые из них.
Именно то, что поверхности пересекаются по окружностям, которые проецируются в линии и используется в методе сфер. 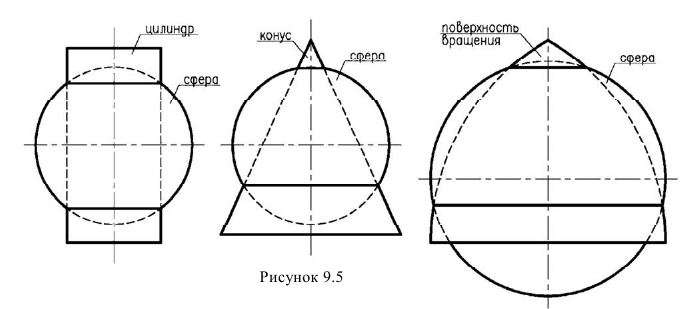
Рассмотрим пример на рисунок 9.6. Даны поверхности вращения — конус и цилиндр. Так как оси лежат в одной плоскости, можно определить точки пересечения контурных образующих в точках 1 и 2, как в предыдущем примере.
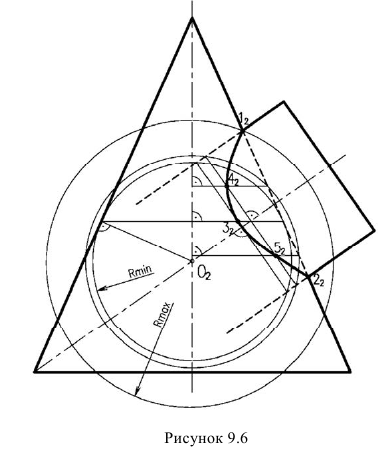
Однако, для нахождения промежуточных точек, вспомогательные секущие плоскости не подходят, т.к. горизонтальные плоскости рассекут цилиндр по эллипсам, фронтально-нроецирующие — конус по эллипсам. А сам эллипс строить непросто. Поэтому именно в этом случае удобно использовать в качестве посредников — сферы. За центр вспомогательных сфер, принимается точка пересечения осей заданных поверхностей. Далее необходимо определить, размеры радиусов вспомогательных секущих сфер. Максимальный радиус сферы
В данном случае минимальная сфера вписана в конус. Минимальная сфера касается поверхности конуса по окружности, а цилиндр пересекает по окружности. Нужно, иметь ввиду, что проекции окружностей пересечения перпендикулярны осям вращения. Эти две окружности пересекаются в точке  . Фактически таких точек две, они совпадают на фронтальной проекции. Для построения промежуточных точек берем вспомогательные сферы радиусов в пределах от
. Фактически таких точек две, они совпадают на фронтальной проекции. Для построения промежуточных точек берем вспомогательные сферы радиусов в пределах от 
Они пересекают и поверхность цилиндра, и поверхность конуса по окружностям, которые пересекаясь даюг промежуточные точки. Полученные точки соединяются плавной линией.
Здесь построена только фронтальная проекция. Для построения горизонтальной проекции, если это необходимо, точки строят как лежащие на окружностях полученных радиусов.
Теорема Монжа
Рассмотрим вариант, когда минимальная сфера касается двух поверхностей вращения. В этом случае для построения линии пересечения поверхностей используется теорема Г. Монжа, которая формулируется так:
Если две поверхности вращении второго порядка описаны около третьей или вписаны в нее, то линии их пересечении распадается на две плоские кривые второго порядка. Плоскости этих кривых проходит через прямую, соединяющую точки пересечении линий касании.
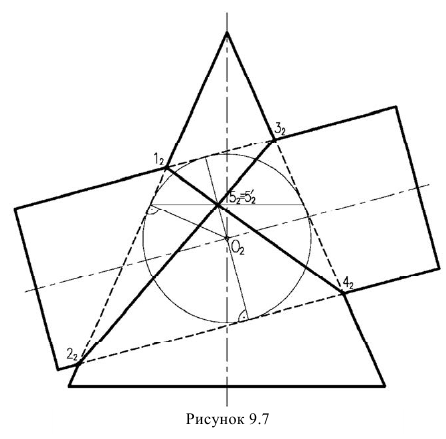
В соответствии с этой теоремой линии пересечения конуса и цилиндра описанного около сферы (рисунок 9.7) будут плоскими кривыми -эллипсами, фронтальные проекции которых изображаются прямыми  проходящими через
проходящими через  — точки линий пересечения окружностей касания.
— точки линий пересечения окружностей касания.
Пересечение поверхностей вращения с многогранниками
Внешние и внутренние формы большинства предметов образуются сочетанием нескольких поверхностей. Пересекаясь между собой, они образуют линии, которые принято называть линиями перехода.
На рис. 9.1 изображена деталь с несколькими линиями перехода. Линия 1 является границей между плоской и торовой поверхностями, 2 — торовой и конической, 3 — конической и плоскими (гранями призмы), 4 и 5 — торовой поверхностью корпуса и цилиндрическими поверхностями патрубков.
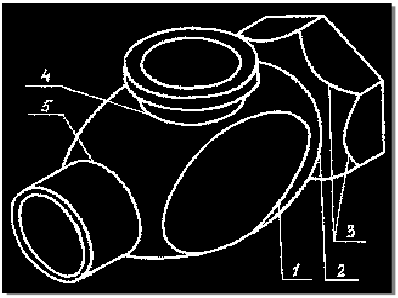 Рисунок 9.1 – Корпус с линиями перехода
Рисунок 9.1 – Корпус с линиями перехода
Линия пересечения многогранника с телом вращения в общем случае состоит из отдельных участков кривых линий, получающихся при пересечении граней многогранника с поверхностью вращения. Точки перехода от одного участка к другому находятся в пересечении ребер многогранника с телом вращения и называются точками излома. Участок линии пересечения может быть и прямой линией в случае пересечения линейчатой поверхности вращения гранью многогранника по образующей.
При проницании (полном пересечении) получаются две замкнутые линии пересечения. Они могут быть плоскими (поверхность вращения проницает одну грань) или пространственными, состоящими из нескольких плоских кривых с точками излома в местах пересечения поверхности вращения ребрами многогранника.
При врезании (неполном пересечении) получается одна замкнутая пространственная линия.
Таким образом, в соответствии с указанным выше, задачи данной темы решаются по следующему плану:
- Определяются точки излома линии пересечения, являющиеся точками пересечения ребер многогранника с поверхностью вращения;
- Находятся точки принадлежащие линиям пересечения отдельных граней многогранника с телом вращения. При этом сначала следует найти характерные (опорные) точки кривых. Это точки, проекции которых отделяют видимую часть проекции линии пересечения от невидимой, это проекции наивысших и наинизших точек линии пересечения, ближайших и наиболее удаленных, крайних слева и справа на проекциях линии пересечения;
- Определение видимости линии пересечения поверхностей и их очерков. Видимость проекций участков линии пересечения определяется из условия расположения их на видимой стороне каждой поверхности.
При построении точек линии пересечения многогранников с телами вращения используют вспомогательные секущие плоскости. Их располагают так, чтобы они пересекали данные поверхности по простым для построения линиям (прямым или окружностям).
Рассмотрим линии пересечения поверхности прямой трехгранной призмы с поверхностью конуса вращения. Боковые грани призмы являются фронтально-проецирующими плоскостями, а ось конуса перпендикулярна горизонтальной плоскости проекций.
Призму можно рассматривать, как три плоскости, проходящие через ее грани, а задача сводится к нахождению линий пересечения этих плоскостей с конусом.
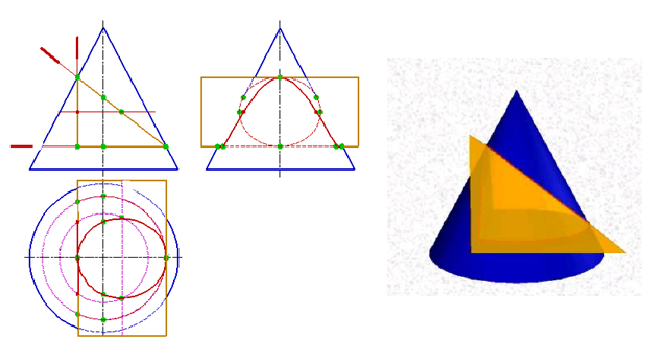
Рисунок 9.2 — Пересечение трехгранной призмы с конусом
Пример. Построить линию пересечения поверхности тора с поверх-ностью трехгранной призмы (рис. 9.3).
Решение. Боковые грани призмы являются фронтально-проецирующими плоскостями и фронтальная проекция линии пересечения совпадают с проекцией боковой поверхности призмы. Из фронтальной проекции видно, что в данном случае имеет место проницание тора призмой (две замкнутые линии пересечения).
На рис. 9.3 рассмотрен пример пересечения поверхностей тора и треугольной призмы [2].
По двум заданным проекциям строим третью – профильную.
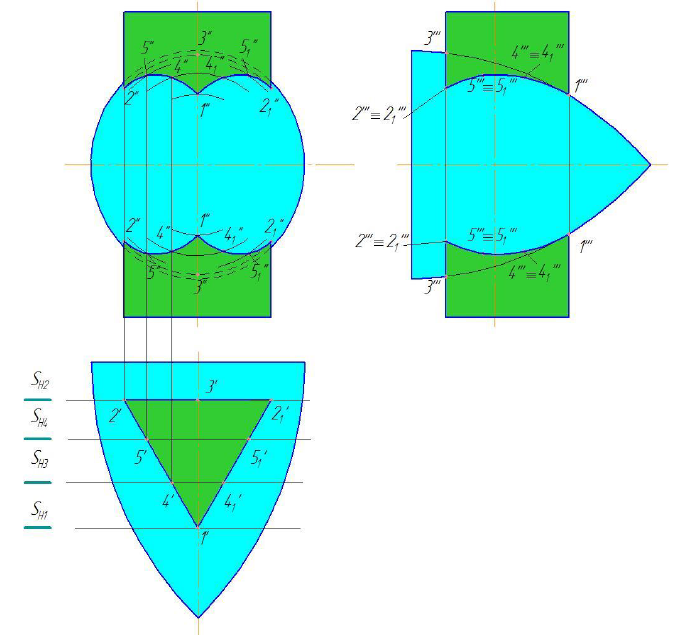
Рисунок 9.3 – Построение линии пересечения трехгранной призмы с тором
Заданная призма – горизонтально-проецирующая. Так как грани призматического отверстия перпендикулярны горизонтальной плоскости проекций, то на чертеже известна горизонтальная проекция линии пересечения, она совпадает с вырожденной проекцией поверхности призмы.
Следовательно, линия пересечения совпадает с горизонтальной проекцией основания призмы.
Определяем характерные точки: самую близкую точку 1 фронтальной плоскостью  и самые далекие –
и самые далекие –  и 3 фронтальной плоскостью S (
и 3 фронтальной плоскостью S ( ).
).
Определяем промежуточные точки 4 и 5 при помощи вспомогательных фронтальных плоскостей  .
.
Соединяем полученные точки плавной кривой линией с учетом видимости.
Пересечение поверхностей вращения
Линия пересечения двух поверхностей вращения в общем случае представляет пространственную кривую, которая может распадаться на две и более части. Эти части могут быть, в частности, и плоскими кривыми и даже прямыми линиями.
Линию пересечения поверхностей обычно строят по ее отдельным точкам. Точки подразделяются на характерные (опорные) и промежуточные (случайные).
Общим способом построения этих точек является способ вспомогательных секущих поверхностей – посредников. При пересечении данных поверхностей вспомогательной поверхностью определяются линии пересечения ее с данными поверхностями, в пересечении этих линий получаются точки, принадлежащие искомой линии пересечения.
Наиболее часто в качестве поверхностей-посредников применяются плоскости или сферы.
Для определения линии пересечения часто пользуются вспомогательными секущими поверхностями. Поверхности-посредники пересекают данные поверхности по линиям, которые, в свою очередь, пересекаются в точках линии пересечения данных поверхностей.
Секущие поверхности-посредники выбираются так, чтобы они, пересекаясь с данными поверхностями, давали простые для построения линии, например прямые и окружности.
Из общей схемы построения линии пересечения поверхностей выделяют два основных метода — метод секущих плоскостей и метод секущих сфер.
Способ вспомогательных секущих плоскостей
В качестве вспомогательных секущих плоскостей чаще всего используют плоскости, параллельные одной из плоскостей проекций.
Положение их выбирают таким, чтобы они пересекали заданные поверхности по простейшим линиям – прямым или окружностям.
Этот способ рекомендуется применять, если сечениями заданных поверхностей одной и той же плоскостью являются прямыми линиями или окружностями. Такая возможность существует в трех случаях:
- Если образующие (окружности) расположены в общих плоскостях уровня;
- Если в общих плоскостях уровня оказываются прямолинейные образующие линейчатой поверхности и окружности циклической;
- Линейчатые каркасы заданных поверхностей принадлежат общим плоскостям уровня или пучкам плоскостей общего положения.
Пересечение цилиндрической и торовой поверхности
Если одна из поверхностей является цилиндрической проецирующей поверхностью, то построение линии пересечения упрощается, так как в этом случае одна проекция линии пересечения совпадает с окружностью – проекцией цилиндра на перпендикулярную плоскость проекций.
На рис. 9.4 построена линия перехода между цилиндром и тором. Так как поверхность цилиндра перпендикулярна плоскости Н, то горизонтальная проекция линии перехода известна. Она совпадает с горизонтальной проекцией цилиндра. Фронтальную и профильную проекции строим по принадлежности точек линии перехода не проецирующей поверхности тора.

Рисунок 9.4 — Построение линии пересечения цилиндра с тором
Линия пересечения заданных поверхностей представляет собой пространственную кривую линию, имеющую фронтальную плоскость симметрии, образованную пересекающимися поверхностями цилиндра и тора.
Рассмотрим линию пересечения поверхности сферы с поверхностью конуса вращения (Рисунок 9.5).
Точки 1 и 7, расположенные на очерках фронтальных проекций конуса и сферы, очевидны и определяются без дополнительных построений.
Точка 4 на экваторе сферы построена с помощью горизонтальной плоскости, пересекающей конус по окружности. В пересечении горизонтальных проекций этой окружности и экватора находится горизонтальная проекция 4′ точки 4 и фронтальная 4» проекции точки 4 определим с помощью линии связи. Точка 4 на горизонтальной проекции разделяет кривую на видимую и невидимую части.
Точки 2, 3, 5 и 6, расположенные в промежутке между характерными точками 1,4 и 7 строим аналогично. С помощью линий связи определим фронтальные и горизонтальные проекции этих точек.
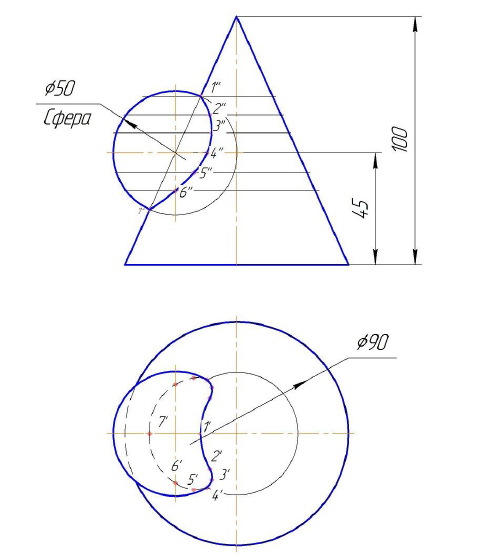
Рисунок 9.5 — Построение линии пересечения конуса и сферы
Особые случаи пересечения
Пересечение соосных поверхностей вращения
Соосными называют поверхности вращения, оси которых совпадают. Линия пересечения таких поверхностей строится на основании теоремы о пересечении соосных поверхностей вращения: соосные поверхности вращения пересекаются между собой по окружностям.
Если ось вращения соосных поверхностей перпендикулярна к какой либо плоскости проекций, то линия их пересечения проецируется на эту плоскость в виде окружности, а на другую плоскость проекций – в прямую линию.
75
На рис. 9.6 даны примеры пересечения соосных поверхностей вращения (ось вращения параллельна горизонтальной плоскости). На рис. 9.6, а приведены сфера и конус, б – сфера и цилиндр, в – сфера и тор.
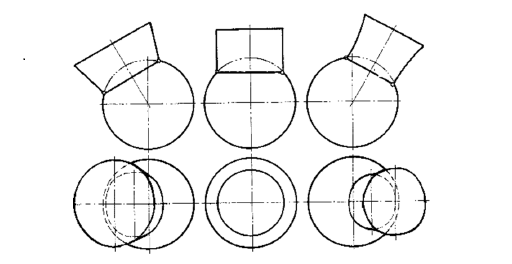
Рисунок 9.6 — Пересечение соосных поверхностей вращения
Теорема Монжа для пересекающихся поверхностей вращения
Если две поверхности второго порядка описаны около третьей или вписаны в нее, то линия их пересечения распадается на две плоские кривые второго порядка. Плоскости этих кривых проходят через прямую, соединяющую точки пересечения линий касания.
Для этого случая пересечения поверхностей вращения необходимо выполнение трех условий:
- пересекающиеся поверхности должны быть поверхностями вращения;
- оси поверхностей должны пересекаться;
- плоскость, образованная осями поверхностей, должна быть параллельна одной из плоскостей проекций.
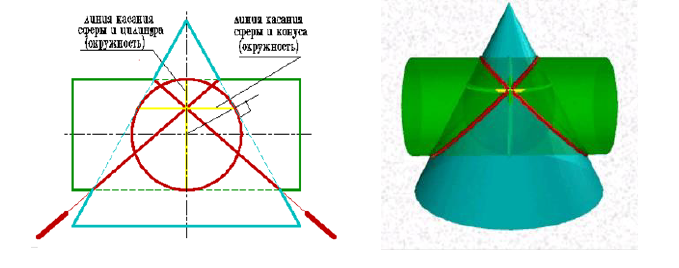
Рисунок 9.7 — Пересечение поверхностей вращения по теореме Монжа
Это положение подтверждается теоремой Монжа: Если две поверхности второго порядка могут быть вписаны или описаны около третьей поверхности второго порядка, то пространственная кривая их пересечения четвертого порядка распадается на две плоские кривые второго порядка.
Способ вспомогательных секущих сфер
При построении линии пересечения поверхностей вращения не всегда удается подобрать секущие плоскости так, чтобы они пересекали поверхности по линиям, проекции которых были бы прямыми или окружностями. В некоторых таких случаях в качестве секущих поверхностей (посредников) целесообразно применять сферы. Этот способ основан на свойстве сферы пересекаться с любой поверхностью вращения, ось которой проходит через центр сферы по окружности.
Чтобы сфера одновременно пересекала две поверхности по окружностям, проецирующимся в прямые линии, необходимо выполнить условия:
- Оси поверхностей вращения должны пересекаться (точку пересечения принимают за центр вспомогательных концентрических сфер).
- Оси поверхностей вращения должны располагаться параллельно какой-либо плоскости проекций.
Пример. Построить проекции линии пересечения поверхностей конуса и цилиндра (рис. 9.8) [1].
Заданы прямой усеченный конус и наклонный цилиндр – тела вращения. Их оси параллельны фронтальной плоскости проекций и пересекаются в точке О(о′,о), т.е. соблюдены условия метода сфер.
Как и в предыдущих задачах, найдем проекции характерных точек. Точка 1 – самая высокая, точка 2 – самая низкая. Чтобы убедится в этом проведем через оси тел вспомогательную фронтальную плоскость  . Эта плоскость рассекает рассматриваемые тела по крайним очерковым образующим, которые на фронтальную плоскость проекции проецируются без искажения и, пересекаясь между собой, образуют искомые точки 1′, 2′. С помощью вспомогательных сфер найдем другие точки линии пересечения заданных поверхностей. Для определения радиуса наименьшей сферы из центра О(о′) проведем две нормали, перпендикулярные очерковым образующим этих тел и большей нормалью выполним эту сферу. Эта сфера будет наименьшей
. Эта плоскость рассекает рассматриваемые тела по крайним очерковым образующим, которые на фронтальную плоскость проекции проецируются без искажения и, пересекаясь между собой, образуют искомые точки 1′, 2′. С помощью вспомогательных сфер найдем другие точки линии пересечения заданных поверхностей. Для определения радиуса наименьшей сферы из центра О(о′) проведем две нормали, перпендикулярные очерковым образующим этих тел и большей нормалью выполним эту сферу. Эта сфера будет наименьшей  , проведенной в большем теле, поэтому поверхности конуса она касается по окружности, которая проецируется на фронтальную плоскость проекций в виде отрезка m′′n′′, а поверхность наклонного цилиндра пересекает по окружности, фронтальная проекция которой также проецируется в прямую линию k′′l′′. В пересечении k′′l′′ и m′′n′′ получим точку 3′′ – самую глубокую точку пересечения. Для нахождения промежуточных точек проведем ряд концентрических сфер, радиусы которых должны находится в пределе
, проведенной в большем теле, поэтому поверхности конуса она касается по окружности, которая проецируется на фронтальную плоскость проекций в виде отрезка m′′n′′, а поверхность наклонного цилиндра пересекает по окружности, фронтальная проекция которой также проецируется в прямую линию k′′l′′. В пересечении k′′l′′ и m′′n′′ получим точку 3′′ – самую глубокую точку пересечения. Для нахождения промежуточных точек проведем ряд концентрических сфер, радиусы которых должны находится в пределе  , и аналогично точке 3′′ находим необходимые промежуточные точки.
, и аналогично точке 3′′ находим необходимые промежуточные точки.
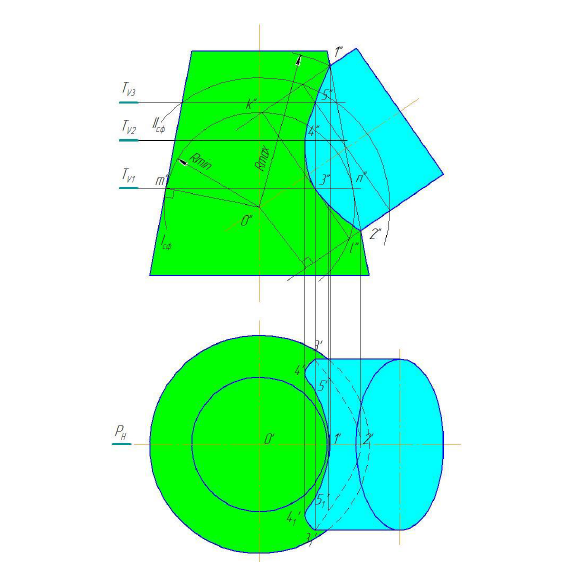
Рисунок 9.8 — Построение линии пересечения конуса и цилиндра
Учитывая, что сфера минимального радиуса всегда касается той поверхности, которая пронизывается другой, соединим найденные фронтальные проекции плавной кривой. Получим фронтальную проекцию линии пересечения. В нашем случае сфера радиусом  касается поверхности конуса, значит, поверхность цилиндра пронизывает поверхность конуса.
касается поверхности конуса, значит, поверхность цилиндра пронизывает поверхность конуса.
Построим горизонтальную проекцию линии пересечения. Т.к. точки 1′′, 2′′ лежат на очерковой образующей конуса, то горизонтальные проекции этих точек находятся на оси конуса, т.е. на горизонтальной проекции этой образующей. Для нахождения горизонтальных проекций точек 3′, 4′, 5′ воспользуемся горизонтальными плоскостями  , проведенными через эти точки соответственно. Каждая плоскость рассекает поверхность конуса по окружности, которая на горизонтальной плоскости проекций не искажается. По линиям связи найдем горизонтальные проекции точек 3′, 4′, 5′.
, проведенными через эти точки соответственно. Каждая плоскость рассекает поверхность конуса по окружности, которая на горизонтальной плоскости проекций не искажается. По линиям связи найдем горизонтальные проекции точек 3′, 4′, 5′.
Для правильного соединения точек определим их видимость. Границей видимости на плоскости Н является точка 4′′, лежащая на осевой фронтальной проекции цилиндра. Горизонтальные проекции ее  находятся на очерковых образующих цилиндра. Соединив плавной кривой найденные точки, получим горизонтальную проекцию линии пересечения рассматриваемых тел.
находятся на очерковых образующих цилиндра. Соединив плавной кривой найденные точки, получим горизонтальную проекцию линии пересечения рассматриваемых тел.
Способ вспомогательных секущих плоскостей
Суть способа — вспомогательная секущая плоскость одновременно пересекает поверхности каждого тела и образует фигуры сечения, контуры которых пересекаются. Точки пересечения контуров соединяют.
Этот способ применим тогда, когда контуры отдельных сечений представляют прямые линии или окружности.
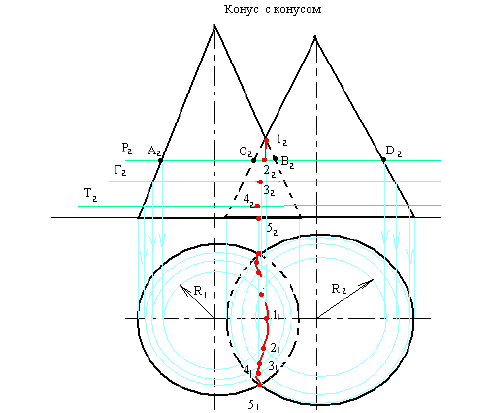
Точки  являются очевидными — это точки пересечения очерковых и оснований конусов. Найдём соответствующие вторые проекции этих точек.
являются очевидными — это точки пересечения очерковых и оснований конусов. Найдём соответствующие вторые проекции этих точек.
Проведём горизонтальную плоскость  которая рассечет оба конуса. В сечении конусов будут окружности
которая рассечет оба конуса. В сечении конусов будут окружности  причем их фронтальными проекциями являются прямые. Построим горизонтальные проекции этих сечений — окружности радиусом
причем их фронтальными проекциями являются прямые. Построим горизонтальные проекции этих сечений — окружности радиусом 
На пересечении этих окружностей сечений на  определим горизонтальную проекцию общей точки —
определим горизонтальную проекцию общей точки —  Фронтальную проекцию точек 2 и 2 определим по линиям связи на секущей плоскости
Фронтальную проекцию точек 2 и 2 определим по линиям связи на секущей плоскости 
Проведём еще ряд горизонтальных секущих плоскостей и определим проекции других промежуточных точек линии пересечения, которые соединим лекальной кривой с учётом видимости.
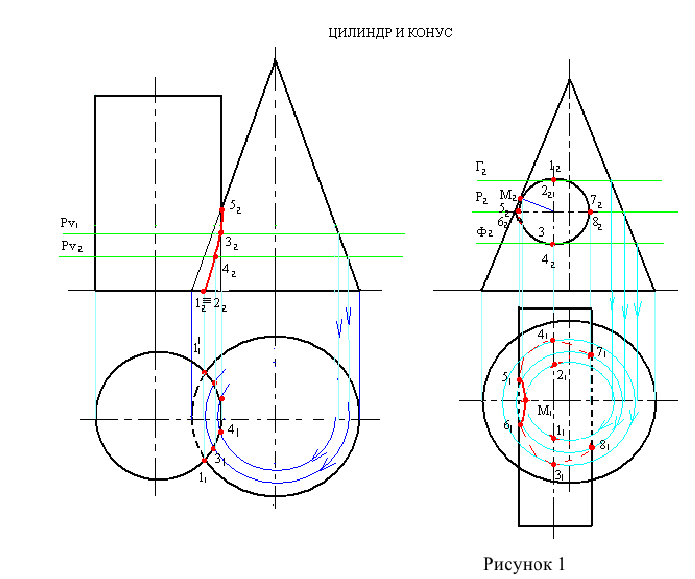
При взаимном пересечении конуса и цилиндра (рисунок 1) ось вращения цилиндра перпендикулярна  . Значит, на
. Значит, на  линия пересечения совпадет с контуром основания цилиндра, т.е. фронтальной проекцией линии пересечения будет являться фронтальная проекция цилиндра.
линия пересечения совпадет с контуром основания цилиндра, т.е. фронтальной проекцией линии пересечения будет являться фронтальная проекция цилиндра.
Построив горизонтальную проекцию линии пересечения, на  на пересечении горизонтальной оси симметрии цилиндра с проекцией цилиндра наметим точки
на пересечении горизонтальной оси симметрии цилиндра с проекцией цилиндра наметим точки 
 — точки границы видимости линии пересечения, лежащие на экваторе цилиндра.
— точки границы видимости линии пересечения, лежащие на экваторе цилиндра.
На  точки линии пересечения, лежащие выше экватора будут видимы, а точки, лежащие ниже экватора — невидимы.
точки линии пересечения, лежащие выше экватора будут видимы, а точки, лежащие ниже экватора — невидимы.
Способ вспомогательных сфер
Этот метод можно применять при соблюдении следующих условий :
- пересекающиеся поверхности должны быть поверхностями вращения;
- их оси должны пересекаться ; точка пересечения осей является центром вспомогательных сфер;
- их оси должны быть // какой-либо плоскости проекций.
Сфера  проходит через самую дальнюю очевидную точку.
проходит через самую дальнюю очевидную точку.
Сфера  , должна касаться образующей большего тела, а меньшее тело -пересекать.
, должна касаться образующей большего тела, а меньшее тело -пересекать.
Сфера  определяется как большее расстояние от центра сфер до образующих обоих тел — перпендикуляры из центра сфер к очерковым образующим. Больший перпендикуляр и будет являться радиусом минимальной сферы.
определяется как большее расстояние от центра сфер до образующих обоих тел — перпендикуляры из центра сфер к очерковым образующим. Больший перпендикуляр и будет являться радиусом минимальной сферы.
Сфера пересекает тела по окружностям, проецирующимся на одну из плоскостей проекций отрезком.
1. Определяем очевидные точки 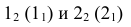
2. Восстанавливаем перпендикуляры из центра сфер к очерковым образующим цилиндра и конуса. Перпендикуляр к цилиндру
к очерковым образующим цилиндра и конуса. Перпендикуляр к цилиндру  больше, чем перпендикуляр к образующей конуса. Значит,
больше, чем перпендикуляр к образующей конуса. Значит,  и будет являться радиусом минимальной сферы. На
и будет являться радиусом минимальной сферы. На  проводим из центра
проводим из центра  этим радиусом R окружность, которая рассечет и конус и цилиндр по окружностям, фронтальной проекцией которых будут прямые — сечение конуса
этим радиусом R окружность, которая рассечет и конус и цилиндр по окружностям, фронтальной проекцией которых будут прямые — сечение конуса и сечение цилиндра
и сечение цилиндра 
На пересечении этих сечений определяем фронтальную проекцию точки 3 —  .
.
3. На  строим горизонтальную проекцию сечения конуса, на котором находится точка 3 -окружность радиусом
строим горизонтальную проекцию сечения конуса, на котором находится точка 3 -окружность радиусом  / 2, на которой по линии связи определяем точки
/ 2, на которой по линии связи определяем точки
1. Проводим ещё ряд секущих сфер радиусом больше минимальной и меньше максимальной и определяем другие промежуточные точки линии пересечения, которые соединяем лекальной кривой с учётом видимости.
Большее тело поглощает меньшее.
2. Видимость линии пересечения определяем следующим образом:
Элементы технического рисования
Технический рисунок — это наглядное изображение, выполненное по правилам аксонометрических проекций от руки, на глаз, соблюдая пропорции. Им пользуются на производстве для иллюстрации чертежей.
Обычно технический рисунок выполняется в изометрии.
Выполнение рисунка модели или детали начинается с проведения аксонометрических осей. Затем рисуется основание и строятся габаритные очертания -прямоугольные параллелепипеды. Деталь мысленно расчленяют на отдельные геометрические элементы, постепенно вырисовывая все элементы.
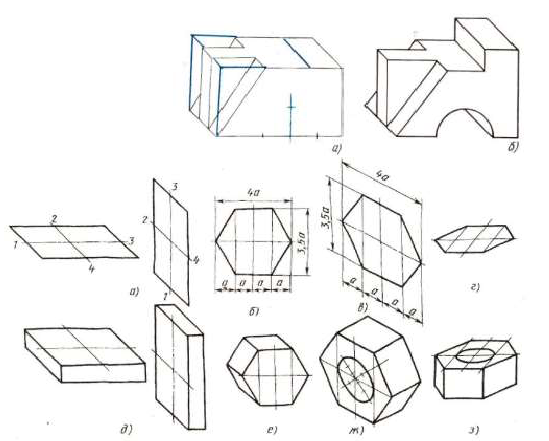
Технические рисунки получаются более наглядными, если их покрыть штрихами. При нанесении штрихов считают, что лучи света падают на предмет справа и сверху или слева и сверху.
Взаимное пересечение поверхностей с примерами
Алгоритм решения задач по определению линии пересечения поверхностей Ф’ и Ф» (рис. 9.1) в целом аналогичен решению второй позиционной задачи и состоит в следующем:
- Обе заданные поверхности Ф’ и Ф» рассекают третьей, вспомогательной плоскостью или поверхностью P.
- Определяют линии пересечения каждой заданной поверхности со вспомогательной: Ф’ × P =l’, Ф» × P =l».
- Определяют точки пересечения полученных линий l’×l» = A и A’. Точки A и a´ принадлежат обеим поверхностям.
- Проведя несколько вспомогательных поверхностей, находят достаточное количество точек и соединяют их плавной лекальной кривой, которая и является искомой линией пересечения поверхностей.
- Определяют видимость поверхностей и линии их пересечения.
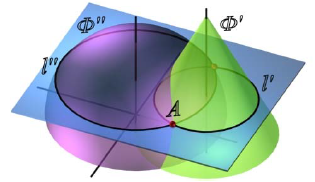
Рис. 9.1. Пересечение поверхностей
В качестве вспомогательных поверхностей P следует выбирать поверхности — плоскости или сферы, которые пересекают обе заданные поверхности по наиболее простым для построения линиям — прямым или окружностям. Кроме того, если в сечении поверхности получаются окружности, они должны проецироваться на одну из плоскостей проекций без искажения.
Определение точек линии пересечения поверхностей начинают с построения так называемых опорных точек. К ним относятся:
- точки пересечения очерковых образующих, если образующие лежат в одной плоскости,
- точки, лежащие на очерковых образующих поверхностей,
- точки, лежащие в общей плоскости симметрии,
- экстремальные (верхние — нижние, правые — левые) по отношению к плоскостям проекций, к центру концентрических сфер.
При соединении точек следует иметь ввиду, что проекции линии пересечения не могут выходить за пределы общей площади — площади наложения — проекций пересекающихся поверхностей. Видимыми будут те участки линии пересечения, которые принадлежат видимым частям обеих поверхностей.
Способ вспомогательных параллельных плоскостей
Этот способ заключается в том, что обе поверхности рассекаются параллельными плоскостями уровня. Этот способ применяют лишь в тех случаях, когда вспомогательные плоскости рассекают поверхности по простым линиям — прямым или окружностям, которые проецируются на соответствующую плоскость проекций без искажения.
Рассмотрим построение линии пересечения прямого кругового конуса и сферы (рис. 9.2).
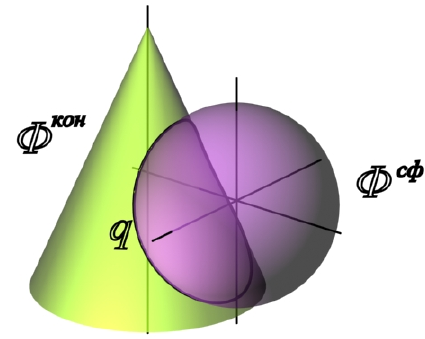
Рис. 9.2. Линия пересечения поверхностей прямого кругового конуса и сферы
Фронтальные плоскости уровня пересекают поверхность конуса по гиперболам, следовательно, для решения данной задачи нужно применить горизонтальные плоскости уровня, которые рассекают обе данные поверхности по окружностям.
Решение задачи начинают с построения опорных точек. Конус и сфера имеют общую плоскость симметрии γ(γ1), параллельную плоскости П2. Поэтому высшая точка A и низшая точка F линии пересечения получаются как результат пересечения очерковых образующих конуса и сферы (рис. 9.3).
Остальные точки определяются с помощью горизонтальных плоскостей уровня. Более подробно разберем построение точек E и E'(рис. 9.4).
1. Пересечь обе поверхности вспомогательной горизонтальной плоскостью уровня α(а2). Плоскость а(а2) пересекает сферу по окружности m(m1,m2), а конус — по окружности q(q1,q2):
m(m1 ,m 2)=Ф сф  а (а2);
а (а2);
q(q1 ,q2) =Фк а (u2).
2. Построив горизонтальные проекции окружностей m и q, определить точки их пересечения E и E’:
E1= m1 × q1; E2=E1E2α2.
E’1=m1 × q1; E’2=ElE2α2.
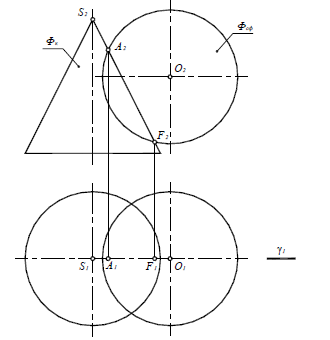
Рис. 9.3. Определение опорных точек линии пересечения поверхностей
3. Аналогичным образом определяются остальные точки, формирующие линию пересечения (рис. 9.5,а). Они получены с помощью горизонтальных плоскостей уровня β(β2), δ(δ2) и μ(μ2). Пределы этих плоскостей по высоте определяют высшая и низшая опорные точки линии пересечения поверхностей. Плоскость μ(μ2)рассекает поверхность сферы по очерковой образующей b (b2, b2),поэтому полученные точки В и В’ являются опорными, ограничивающими линию пересечения поверхностей по ширине.
4. Последовательно соединить одноименные проекции полученных точек плавной лекальной кривой. Полученная линия не должна выходить за пределы области перекрытия проекций данных поверхностей.
5. Определить видимость линии пересечения поверхностей и их очерковых образующих.
Поверхность конуса на горизонтальной плоскости проекций полностью видима, следовательно, видимость линии пересечения определяется по поверхности сферы. Видима будет та часть сферы, которая на П2 лежит выше очерковой образующей b2.Точки В и В’ на очерковой образующей сферы являются точками смены видимости линии пересечения на плоскости проекций П1.
Искомая линия пересечения поверхностей конуса и сферы d(d1,d2) (кривая второго порядка), полученная способом вспомогательных секущих плоскостей, приведена на рис 9.5,б.
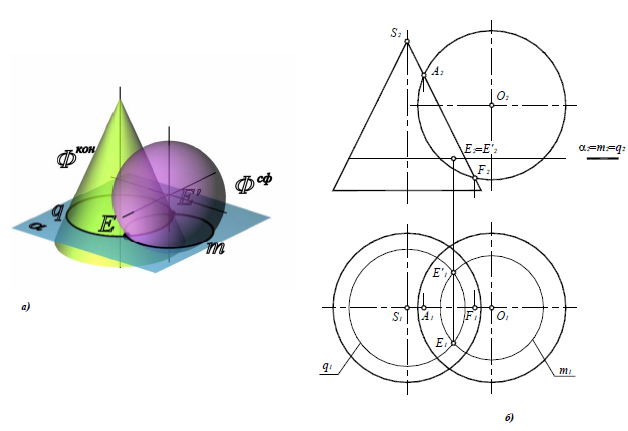
Рис. 9.4. Определение промежуточных точек линии пересечения поверхностей:
а — наглядное изображение;
б — комплексный чертеж
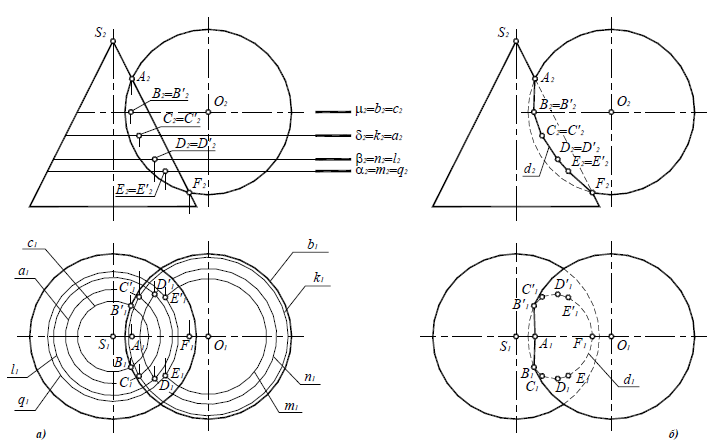
Рис. 9.5. Определение линии пересечения поверхностей способом вспомогательных параллельных плоскостей:
а — определение промежуточных точек;
б — искомая линия пересечения
Способ вспомогательных сфер
При построении линии пересечения двух поверхностей способом вспомогательных сфер возможны два случая. В одном из них используются сферы, проведенные из одного, общего центра (концентрические), а в другом -сферы, проведенные из разных центров (эксцентрические).
Способ концентрических сфер
Этот способ применяется для построения линии пересечения поверхностей вращения произвольного вида, при условии, что оси этих поверхностей пересекаются.
В основу способа концентрических сфер положено свойство сферы с центром на оси какой-либо поверхности.
Если центр сферы находится на оси любой поверхности вращения, то сфера соосна с поверхностью вращения и в их пересечении получатся окружности (рис. 9.6).
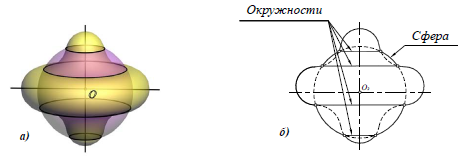
Рис. 9.6. Соосные поверхности вращения:
a- наглядное изображение;
б — на комплексном чертеже
Рассмотрим способ концентрических сфер на примере построения линии пересечения цилиндра и конуса вращения, оси которых i(i1,i2) и q(q1,q2) пересекаются и точка пересечения осей обозначена через O (O1 ,O2)(рис. 9.7).
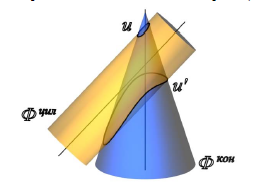
Рис. 9.7. Линия пересечения поверхностей цилиндра и прямого кругового конуса
Точка пересечения осей поверхностей принимается за центр вспомогательных концентрических сфер.
Алгоритм решения задачи об определении линии пересечения поверхностей состоит в следующем:
1. Определить опорные точки (рис. 9.8). Так как обе данные поверхности имеют общую плоскость симметрии δ(δ1), параллельную плоскости проекций П2, то их очерковые образующие, по отношению к плоскости П2,пересекаются. Точки A(A1,A2), B(B1,B2), C(C1,C2) и D(D1,D2) пересечения этих образующих являются точками видимости линии пересечения поверхностей.
2. Определить радиусы максимальной и минимальной сфер, необходимых для определения точек линии пересечения.
Радиус максимальной сферы Rmax равен расстоянию от центра вспомогательных сфер до наиболее удаленной точки пересечения очерковых образующих, в данном случае Rmax=O2A2 (рис. 9.9).
Чтобы определить радиус минимальной сферы Rmin, необходимо провести через точку O2 нормали к очерковым образующим данных поверхностей. Тогда больший из отрезков этих нормалей и будет Rmin. В этом случае сфера минимального радиуса будет касаться одной из данных поверхностей, а со второй — пересекаться.
В данном случае сферой минимального радиуса является сфера, касающаяся цилиндрической поверхности (см. рис. 9.9).
Сфера радиусом Rmin касается цилиндрической поверхности по окружности m, которая на фронтальной проекции изображается в виде прямой m2, перпендикулярной q2(m2 q2). Эта же сфера пересекает коническую поверхность по двум окружностям. Но, в данном случае, нам интересна только окружность n, так как только она дает решение. Эта окружность n изображается на фронтальной проекции в виде прямой n2, перпендикулярной i2(n2i2). Точки E и Fпересечения этих окружностей будут принадлежать обеим поверхностям:
q2). Эта же сфера пересекает коническую поверхность по двум окружностям. Но, в данном случае, нам интересна только окружность n, так как только она дает решение. Эта окружность n изображается на фронтальной проекции в виде прямой n2, перпендикулярной i2(n2i2). Точки E и Fпересечения этих окружностей будут принадлежать обеим поверхностям:
m2×n2 =E2, F2.
Чтобы построить горизонтальные проекции точек Е и F следует воспользоваться окружностью n, содержащей данные точки, так как она не искажается на плоскости проекций П1:
E1 ,F 1∈ n1.
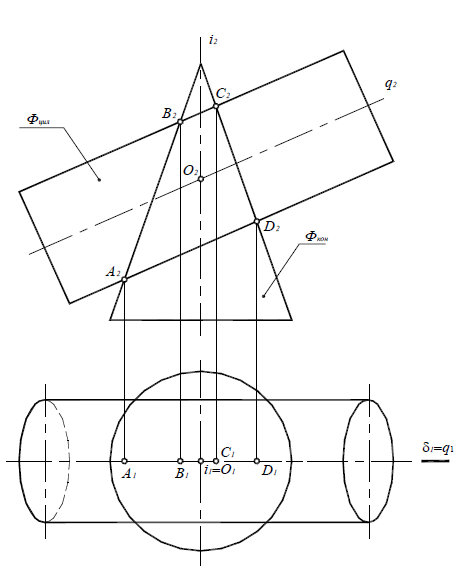
Рис. 108. Определение опорных точек линии пересечения поверхностей
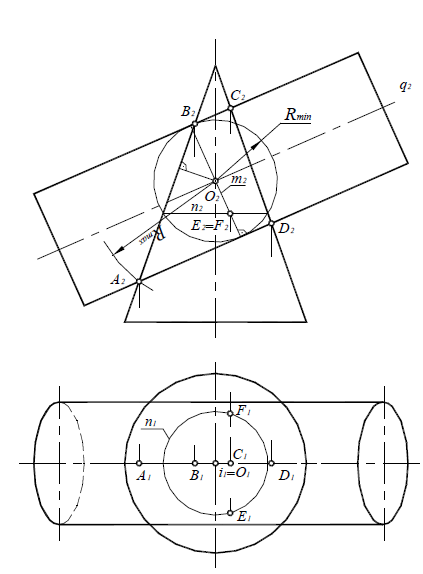
Рис. 9.9. Определение радиусов максимальной и минимальной сфер.
Для построения промежуточных точек линии пересечения проводят несколько концентрических сфер с центром в точке O, причем радиус R этих сфер должен изменяться в пределах Rmin< R < Rmax.
Рассмотрим определение точек линии пересечения на примере сферы радиусом R1 (Rmin1max) (рис. 9.10, 9.11).
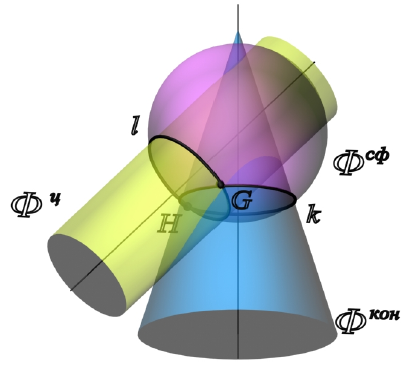
Рис. 9.10. Определение промежуточных точек линии пересечения поверхностей
Сфера радиусом R1 пересекает цилиндрическую поверхность по окружности l, которая на фронтальной проекции изображается в виде прямой l2, перпендикулярной q2( 12q2). Эта же сфера пересекает коническую поверхность по окружности k, которая изображается на фронтальной проекции в виде прямой k2, перпендикулярной i2(k2i2). Точки G и Hпересечения этих окружностей будут точками искомой линии пересечения:
12×k2=G2, H2.
Чтобы построить горизонтальные проекции точек G и H, следует воспользоваться окружностью k, содержащей данные точки, так как она не искажается на плоскости проекций Π1: G1∈ k 1.
4. Аналогичным образом определить все остальные точки искомой линии пересечения. Последовательно соединить полученные точки плавной лекальной кривой. В данном случае линия пересечения поверхностей цилиндра и конуса представляет собой две кривые второго порядка u(u1,u2) и u( u’1 ,u 2) (рис. 9.12).
Горизонтальная проекция линии пересечения поверхностей симметрична относительно плоскости δ(δ1) — общей плоскости симметрии данных поверхностей. Эта плоскость была указана ранее (см. рис. 9.8).
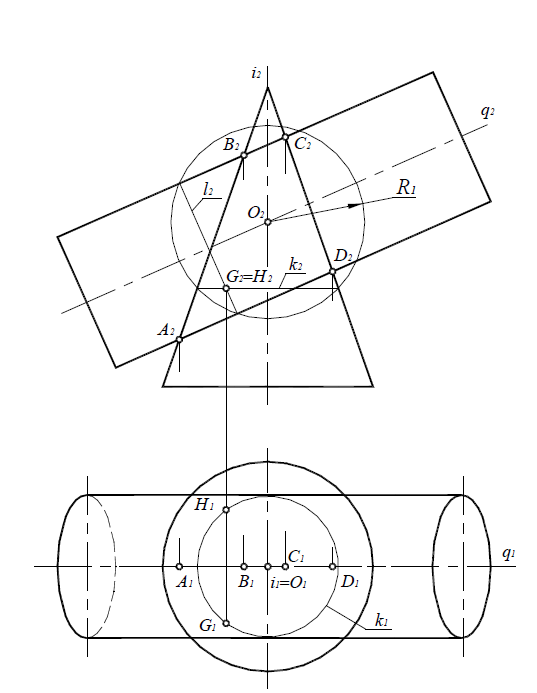
Рис. 9.11. Определение промежуточных точек линии пересечения поверхностей
5. Определить видимость линии пересечения поверхностей и их очерковых образующих. На фронтальной плоскости проекций видимы будут те точки линии пересечения, которые лежат перед горизонтальной проекцией очерковых образующих, проекции которых совпадают с плоскостью симметрии δ(δ1), — точки A, M, G, E, D и B, K, P, C. На горизонтальной плоскости проекций линия u(u1,u2) видима, так как все ее точки лежат выше фронтальной проекции оси вращения цилиндра q(q2), а линия u(u1 ,u2)будет невидима, поскольку все ее точки лежат ниже фронтальной проекции образующих, совпадающих с проекцией оси вращения цилиндра q(q2).
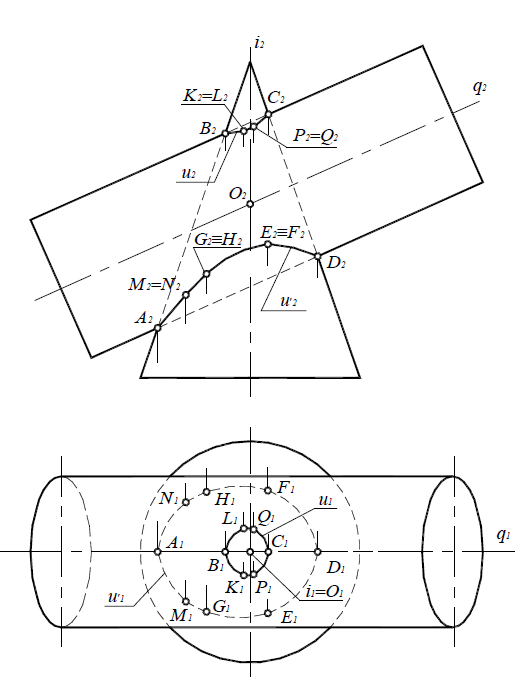
Рис. 9.12. Линия пересечения поверхностей цилиндра и конуса
Пересечение поверхностей
Пересечение поверхностей и способы построения линий пресечения
Линия пересечения принадлежит обеим пересекающимся поверхностям и образуется множеством их общих точек. Следовательно, построение линии пересечения поверхностей сводится к построению этих общих точек.
При пересечении поверхностей вращения порядок линии пересечения определяется умножением порядков пересекающихся поверхностей. Например, если пересекаются круговой конус (поверхность 2-го порядка) и сфера (поверхность 2-го порядка), то линия пересечения является кривой 4-го порядка.
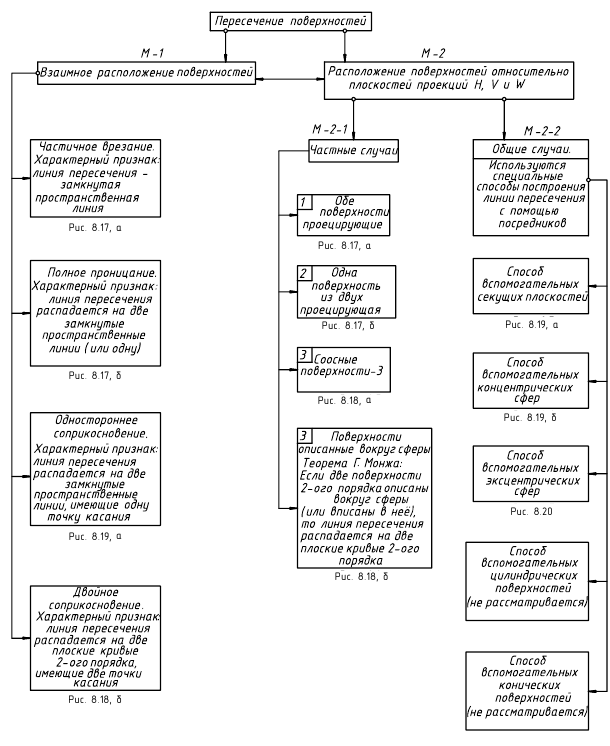
Определение способа построения линии пересечения зависит от взаимного расположения пересекающихся поверхностей, а также от их расположения относительно плоскостей проекций. Из всех возможных вариантов пересечения поверхностей геометрических тел в зависимости от их взаимного расположения можно выделить четыре случая, которые позволяют определить и представить форму линии пересечения поверхностей:
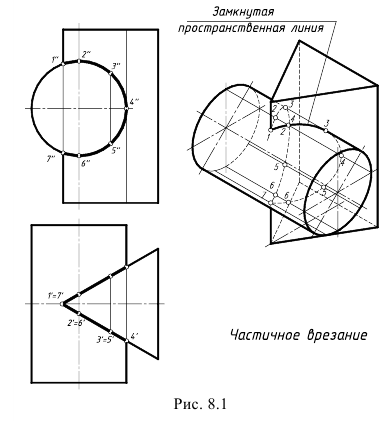
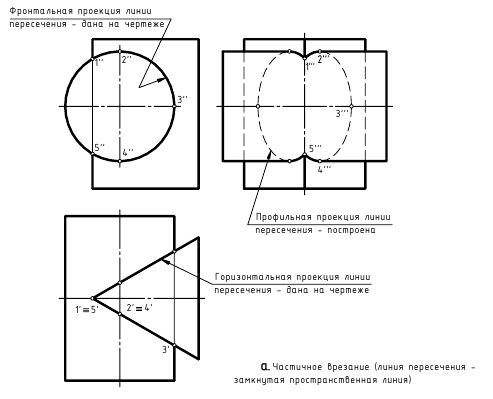
I случай. Частичное врезание (рис. 8.1). В этом случае линией пересечения является одна замкнутая пространственная линия.
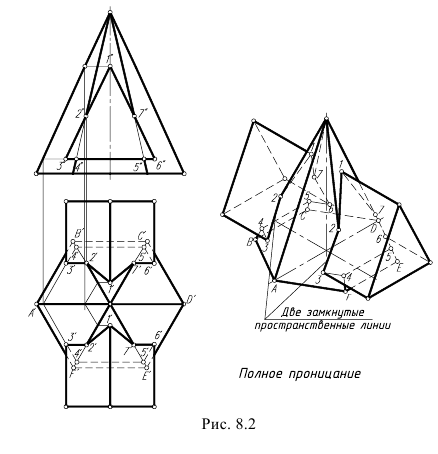
II случай. Полное проницание (рис. 8.2). В этом случае линией пересечения являются две замкнутые пространственные линии.
III случай. Одностороннее соприкосновение (рис. 8.3). В этом случае поверхности соприкасаются в одной общей точке K1 и линия их пересечения, проходя через эту точку, распадается на две замкнутые пространственные линии (поверхности имеют одну общую касательную плоскость).
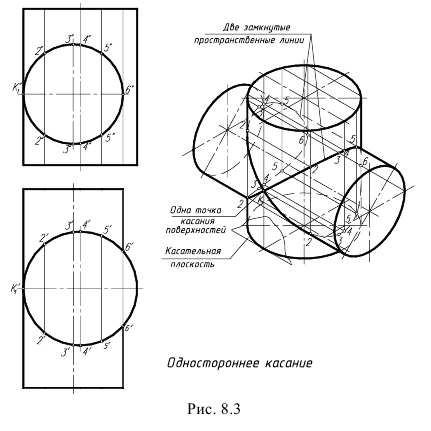
IV случай. Двойное соприкосновение (рис. 8.4).
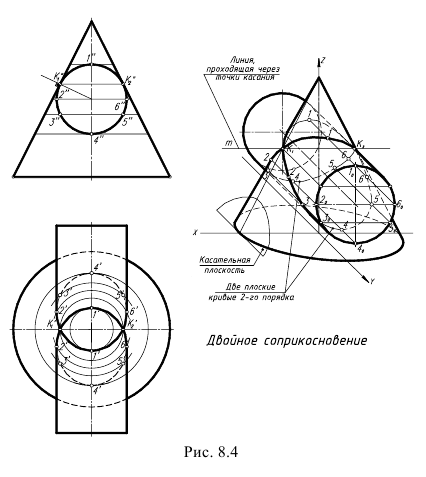
В этом случае поверхности имеют две точки соприкосновения K1 и K2 и линия их пересечения распадается на две плоские кривые в соответствии с теоремой 2 (С. А. Фролов «Начертательная геометрия» [23]): «Если две поверхности вращения второго порядка имеют касание в двух точках, то линия их пересечения распадается на две кривые второго порядка, плоскости которых проходят через прямую m, соединяющую точки касания» (поверхности имеют две общие касательные плоскости).
В зависимости от расположения пересекающихся геометрических тел относительно плоскостей проекций и участия в пересечении геометрических тел, имеющих проецирующую поверхность (как призма или цилиндр) или не имеющих проецирующей поверхности (пирамида, конус, шар, тор, тороид, наклонная призма или наклонный цилиндр, глобоид и др.), следует выбрать оптимальный способ построения проекций линии пересечения поверхностей на чертеже.
По этим признакам способы построения линий пересечения поверхностей можно объединить в две группы:
Первая группа: частные случаи пересечения поверхностей, когда для построения линий пересечения не требуется применения специальных способов, а используется частное положение пересекающихся геометрических тел относительно плоскостей проекций.
Вторая группа: общие случаи пересечения поверхностей, когда для построения линий пересечения требуется применить специальные способы посредников.
Частные случаи пересечения поверхностей
K первой группе частных случаев пересечения поверхностей относятся следующих четыре случая:
1-й случай: пересечение геометрических тел, боковые поверхности которых являются проецирующими, то есть, перпендикулярны какой-либо плоскости проекций.
2-й случай: пересечение геометрических тел, у одного из которых боковая поверхность является проецирующей.
3-й случай: пересечение соосных поверхностей вращения, т. е. имеющих общую ось вращения.
4-й случай: пересечение поверхностей вращения второго порядка, описанных вокруг сферы (по теореме Г. Монжа).
Рассмотрим на примерах построение проекций линий пересечения поверхностей геометрических тел в четырех частных случаях первой группы.
Следует отметить, что перечисленные частные случаи пересечения поверхностей наиболее часто встречаются при формообразовании различных реальных деталей.
1-й частный случай
На рис. 8.5 показан пример построения проекций линии пересечения поверхностей горизонтально-проецирующего цилиндра и фронтально-проецирующей прямой правильной треугольной призмы, то есть пересекаются два геометрических тела, боковые поверхности которых занимают относительно плоскостей проекций проецирующее положение.
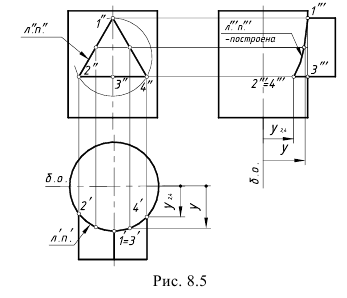
Характерный признак 1-го частного случая: на заданных проекциях тел определяются две проекции искомой линии пересечения:
– фронтальная проекция (л»п») линии пересечения 1″-2″-3″-4″ совпадает с вырожденной в ломаную линию боковой поверхностью призмы;
– горизонтальная проекция (л’п’) линии пересечения 1′-2′-3′-4′ совпадает с участком окружности, которая является вырожденной проекцией боковой поверхности цилиндра.
Следовательно, требуется достроить только профильную проекцию (л'»п»‘) линии пересечения, построив профильные проекции обозначенных точек по их принадлежности одному из тел (в данной задаче – цилиндру), и соединить их плавной кривой с учетом ее видимости на поверхностях.
2-й частный случай
На рис. 8.6 показан пример построения проекций линии пересечения поверхностей прямого кругового конуса и фронтально-проецирующего цилиндра, то есть пересекающихся геометрических тел, у одного из которых боковая поверхность проецирующая.
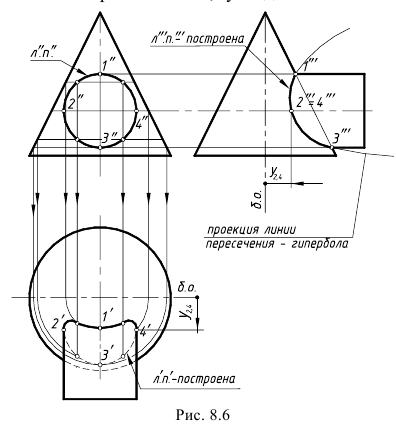
Характерный признак 2-го частного случая: на заданных проекциях тел определяется одна проекция линии пересечения:
– фронтальная проекция (л»п») линии пересечения 1″-2″-3″-4″ совпадает с окружностью, которая является вырожденной проекцией боковой поверхности цилиндра.
Следовательно, требуется достроить горизонтальную (л’п’) и профильную (л»‘п»‘) проекции линии пересечения, построив горизонтальные и профильные проекции обозначенных точек по их принадлежности конусу, и соединить построенные на проекциях точки плавными кривыми линиями с учетом их видимости на поверхностях.
!!! На профильную проекцию предмета пространственная кривая линия пересечения 4-го порядка проецируется в виде участка гиперболы.
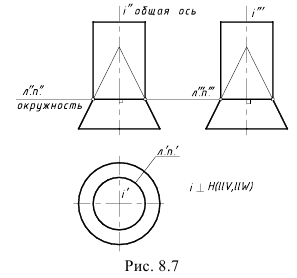
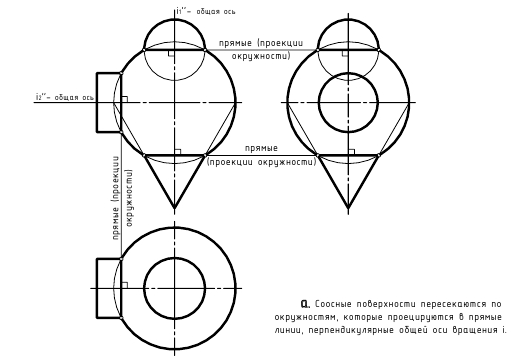
3-й частный случай
Пересечение соосных геометрических тел. Соосными называются геометрические тела вращения, имеющие общую ось вращения «i». Поверхности соосных тел пересекаются по окружностям, перпендикулярным их общей оси. Если общая ось «i» соосных геометрических тел является прямой проецирующей (т. е. она перпендикулярна какой-либо одной плоскости проекций, а двум другим параллельна), то окружность пересечения проецируется дважды в прямую линию, перпендикулярную их общей оси, на те плоскости проекций, которым эта общая ось параллельна.
На рис. 8.7 показан пример построения линии пересечения соосных геометрических тел – конуса и горизонтально-проецирующего цилиндра, имеющих общую горизонтально-проецирующую ось i (ось перпендикулярна H и параллельна V и W). Линией пересечения является окружность, фронтальная (л»п») и профильная (л»‘п»‘) проекции которой представляют собой прямые линии, перпендикулярные их общей оси i и проходящие через точки пересечения фронтальных и профильных очерков поверхностей. Горизонтальная проекция этой окружности пересечения л’п’) совпадает с вырожденной горизонтальной проекцией боковой поверхности цилиндра.
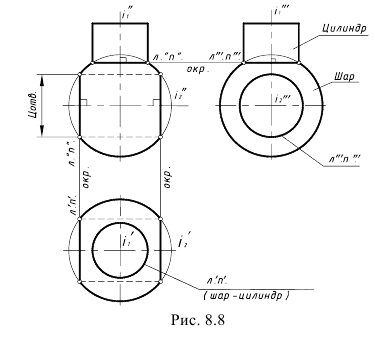
На рис. 8.8 показан пример построения линий пересечения двух пар соосных поверхностей:
– поверхности шара и горизонтально-проецирующего цилиндра, соосных относительно горизонтально-проецирующей оси i1, окружности пересечения которых проецируются в прямые линии на фронтальную и профильную проекции;
– поверхности шара и сквозного профильно-проецирующего цилиндрического отверстия Цотв в шаре, соосных относительно профильно-проецирующей оси i2, окружности пересечения которых проецируются в прямые линии на фронтальную и горизонтальную проекции.
4-й частный случай
Пересечение поверхностей вращения второго порядка, описанных вокруг сферы (по теореме Г. Монжа).
Напоминаем, к поверхностям вращения второго порядка относятся круговые цилиндр и конус, шар, эллипсоиды, параболоид и одно-, двуполостные гиперболоиды.
Эллиптические цилиндры и конусы, а также наклонный круговой конус – это не поверхности вращения!
Все торы (открытый, закрытый и самопересекающийся), глобоиды и тороиды относятся к поверхностям вращения четвертого порядка!
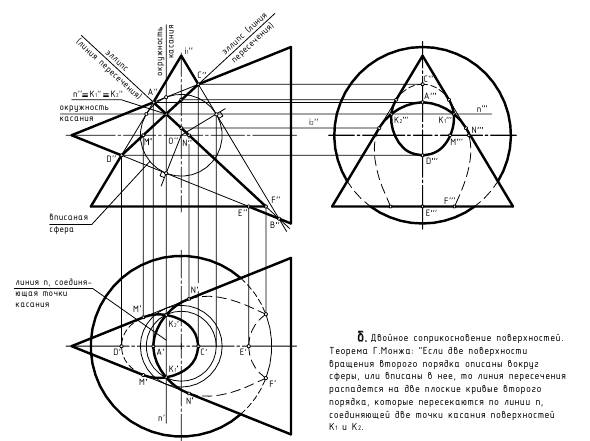
В 4-м частном случае имеет место двойное соприкосновение пересекающихся поверхностей вращения второго порядка, описанных вокруг сферы, и построение линии пересечения основано на теореме 2 (С. А. Фролов «Начертательная геометрия» [23]):
Теорема 3, известная как теорема Г. Монжа, вытекает из теоремы 2: «Если две поверхности вращения второго порядка описаны вокруг третьей поверхности второго порядка или вписаны в нее, то линия их пересечения распадается на две кривые второго порядка, плоскости которых проходят через прямую, соединяющую точки касания».
Практическое применение теоремы возможно в том случае, когда две поверхности вращения второго порядка описаны вокруг сферы или вписаны в нее.
Использовать теорему Г. Монжа для построения на чертеже линии пересечения поверхностей можно при наличии в задаче четырех обязательных графических условий:
- Пересекаются поверхности вращения второго порядка.
- Оси поверхностей вращения должны пересекаться (точка пересечения – центр вписанной сферы).
- Поверхности описаны вокруг общей сферы или вписаны в нее.
- Общая плоскость симметрии, проходящая через оси поверхностей, является плоскостью уровня.
При соблюдении этих четырех условий на одной из заданных проекций можно построить проекции двух плоских кривых, на которые распадается искомая линия пересечения:
- – плоские кривые проецируются в отрезки прямых линий на ту проекцию предмета, которая расположена на плоскости проекций, параллельной общей плоскости симметрии поверхностей;
- – точки пересечения очерков поверхностей на этой проекции принадлежат искомой линии пересечения и через эти точки проходят прямые, в которые проецируются плоские кривые пресечения;
- – прямые, как проекции плоских кривых, пересекаются в точке, с которой совпадают проекции двух точек K1≡K2 соприкосновения поверхностей и соответственно проекция прямой m(m’, m»), соединяющей эти точки соприкосновения (точки касания).
!!! Точки касания (соприкосновения) поверхностей K1(K1«) и K2(K2«) определяются на пересечении проекций окружностей касания вписанной сферы с каждой из поверхностей.
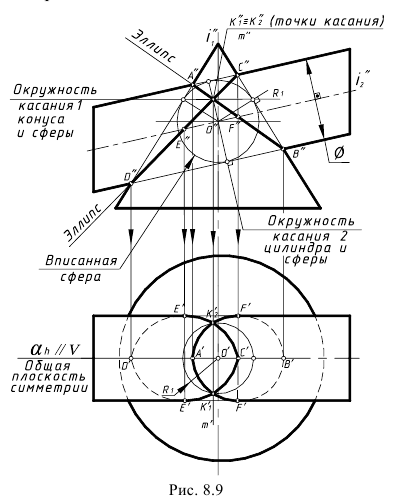
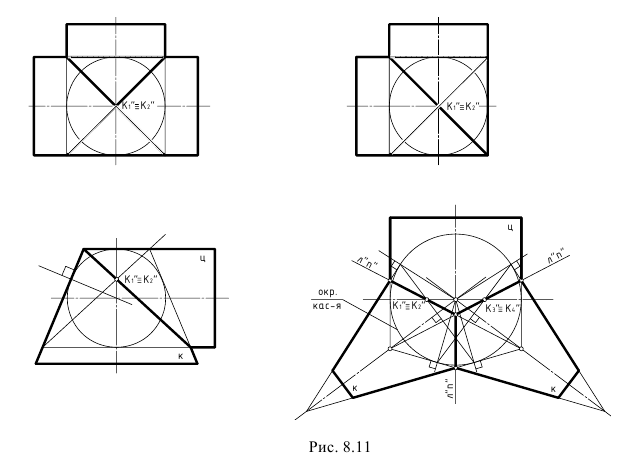
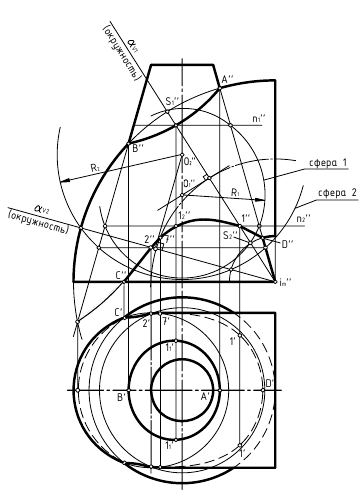
На рис. 8.9 показан пример построения проекций линии пересечения поверхностей вращения второго порядка – прямого кругового конуса и наклонного кругового цилиндра, описанных вокруг общей сферы. Для решения задачи использована теорема Г. Монжа, поскольку здесь соблюдены все четыре обязательных условия ее применения:
- Пересекаются прямой круговой конус и круговой наклонный цилиндр, т. е. поверхности вращения второго порядка.
- Оси конуса и цилиндра пересекаются в точке O(O»).
- Обе поверхности описаны вокруг общей для них сферы с центром точке O(O»).
- Общая плоскость симметрии поверхностей α(αH) является фронтальной плоскостью уровня (//V).
Построение проекций линии пересечения поверхностей по теореме Г. Монжа выполняется по следующему графическому алгоритму:
1-е действие. Определить проекцию предмета, на которую плоские кривые проецируются в отрезки прямых линий: в данной задаче это фронтальная проекция, так как общая плоскость симметрии α(αН) параллельна фронтальной плоскости проекций V.
2-е действие. Построить фронтальные совпадающие проекции K1≡K2 точек соприкосновения заданных поверхностей, лежащих на пересечении проекций окружностей касания вписанной сферы с каждой из поверхностей (прямые линии – проекций этих окружностей касания – строятся как линии пересечения соосных поверхностей, так как вписанная сфера образует две пары соосных поверхностей – конус/сфера с общей осью i1 и цилиндр/сфера с общей осью i2. На чертеже проекции этих окружностей касания проходят через точки, полученные на пересечении перпендикуляров, проведенных из точки О(О») – центра вписанной сферы – к образующим конуса (окружность касания 1) и цилиндра (окружность касания 2).
3-е действие. Отметить на фронтальной проекции точки A(A»), B(B»), C(C») и D(D») пересечения очерков поверхностей и построить фронтальные проекции плоских кривых пересечения 2-го порядка, соединив прямыми линиями A-B(A»-B») и C-D(C»-D») противоположные точки пересечения очерков (обе прямые обязательно должны пройти через построенные проекции точек соприкосновения поверхностей K1≡K2 (K»1≡K»2);
4-е действие. Построить горизонтальные проекции двух плоских кривых пересечения – эллипсов, по горизонтальным проекциях обозначенных точек A, B, C, D, K1 и K2, построенных по принадлежности поверхности конуса; обозначить и построить точки E(E’) и F(F’), которые лежат на очерковых образующих горизонтальной проекции цилиндра и определяют границу видимости кривых на горизонтальной проекции предмета, а также отметить и построить необходимое количество промежуточных точек (здесь не обозначены).
5-е действие. Оформить фронтальный и горизонтальный очерки пресекающихся поверхностей.
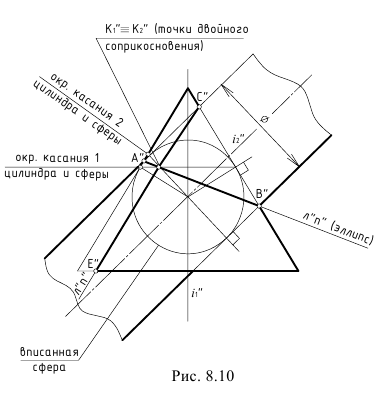
!!! Построение точек соприкосновения K1≡K2 поверхностей особенно важно в задачах, где по условию нельзя определить одну из четырех точек пересечения очерков поверхностей. Совпадающие проекции точек соприкосновения в этом случае определят направление одной из двух прямых линий – проекций плоских кривых пересечения (рис. 8.10). В данном случае проекция плоской кривой линии пересечения CE проведена через точки C и K1≡K2. Точка E определяется на основании конуса.
На рис. 8.11 показаны примеры построения линий пересечения поверхностей второго порядка, описанных вокруг сферы, с применением теоремы Г. Монжа. Они часто встречаются при конструировании различных переходов цилиндрических и конических труб, или пересечений отверстий в деталях.
Общие случаи пересечения поверхностей и способы построения линий пересечения поверхностей
Ко второй рассматриваемой группе относятся общие случаи пересечения геометрических тел, боковые поверхности которых могут занимать относительно плоскостей проекций непроецирующее положение (это наклонные призмы и цилиндры), а также геометрические тела, поверхности которых непроецирующие – это конус, сфера, торы, глобоид, эллипсоид, параболоид и гиперболоиды. Сюда же относятся наклонный эллиптический цилиндр, имеющий круговые сечения, и наклонный круговой конус.
Для построения линий пересечения поверхностей в этом случае применяются специальные способы вспомогательных посредников – плоскостей уровня или поверхностей (сфер, цилиндров, конусов), из которых мы рассматриваем следующие:
- способ вспомогательных секущих плоскостей уровня;
- способ вспомогательных концентрических сфер;
- способ вспомогательных эксцентрических сфер.
Применение одного из указанных способов для построения линий пересечения поверхностей геометрических тел возможно при наличии некоторых обязательных графических условий расположения геометрических тел относительно плоскостей проекций и зависит от того, какие именно геометрические тела пересекаются в конкретной задаче.
Линия пересечения поверхностей является общей для обеих поверхностей и образуется множеством общих точек, которые строятся с помощью вспомогательных посредников.
Предварительно требуется выполнить графический анализ условия задачи для выбора рационального способа ее решения, определить проекцию предмета, на которой следует начинать решение задачи, и границы введения посредников.
Для построения проекций точек, принадлежащих линии пересечения поверхностей, способом посредников следует применять общий для всех рассматриваемых способов графический алгоритм.
Графический алгоритм I:
1-е действие. Ввести вспомогательную плоскость или поверхность-посредник.
2-е действие. Построить вспомогательные линии пересечения плоскости – или поверхности-посредника с каждой из заданных поверхностей.
3-е действие. Определить точки пересечения построенных вспомогательных линий пересечения – эти точки принадлежат искомой линии пересечения.
Рассмотрим на примерах применение различных способов вспомогательных посредников для построения проекций линий пересечения поверхностей.
Способ вспомогательных секущих плоскостей уровня
Применение способа вспомогательных секущих плоскостей рационально при наличии двух графических условий:
1. Общая плоскость симметрии пересекающихся геометрических тел является плоскостью уровня; при соблюдении этого условия точки пересечения очерков поверхностей принадлежат искомой линии пересечения и определяют верхнюю и нижнюю границу введения плоскостей-посредников на соответствующей проекции предмета.
2. Сечениями геометрических тел в одной из плоскостей уровня должны быть простые в построении линии пересечения – прямые линии (образующие) или окружности; эту плоскость уровня и следует выбрать в качестве посредника.
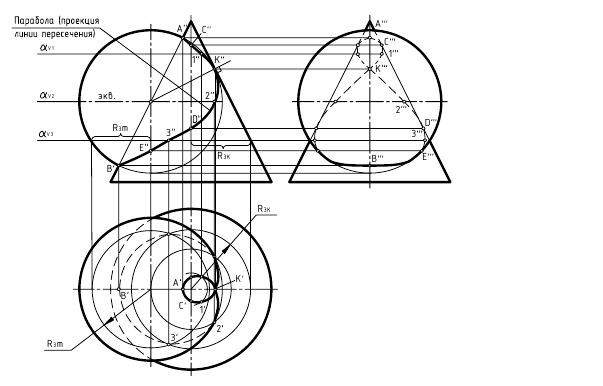
На рис. 8.12 показан пример построения проекций линии пересечения прямого конуса и половины шара.
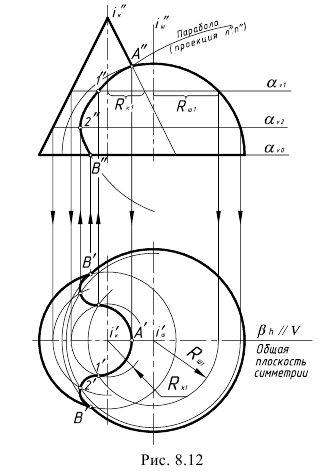
Для решения задачи требуется предварительно выполнить графический анализ заданных проекций предмета:
А. Выбираем для решения задачи способ вспомогательных секущих плоскостей, так как здесь соблюдены два графических условия его применения:
– общая плоскость симметрии β(βН) геометрических тел – конуса и полушара – является фронтальной плоскостью уровня (первое условие применения);
– горизонтальные плоскости уровня, которые пересекают поверхности конуса и полушара по окружностям, выбираем в качестве вспомогательных плоскостей-посредников (второе условие применения).
Б. Решение задачи, то есть введение плоскостей-посредников, начинаем на фронтальной проекции предмета, так как общая плоскость симметрии геометрических тел является фронтальной плоскостью уровня.
В. Определяем границы введения плоскостей-посредников – это точка А(А») пересечения фронтальных очерков и точки B(B’,B») пересечения окружностей оснований конуса и полушара, лежащие в горизонтальной плоскости уровня α(αVо).
Построить проекции точек искомой линии пересечения, выполнив действия предложенного графического алгоритма I:
1-е действие. Ввести на фронтальной проекции предмета первую вспомогательную секущую горизонтальную плоскость-посредник α(αV1) произвольно и ниже точки А(А»).
2-е действие. Построить на горизонтальной проекции предмета вспомогательные окружности радиусами Rк1 и Rш1, по которым секущая плоскость-посредник α(αV1) пересекает поверхности конуса и шара.
3-е действие. Определить на пересечении построенных вспомогательных окружностей горизонтальные проекции точек 1(1′), принадлежащих линии пересечения; фронтальные совпадающие проекции 1(1″) этих точек определяются по линии связи на фронтальной проекции плоскости-посредника α(αV1).
3.1. Повторить действия основного графического алгоритма, введя вторую плоскость-посредник α2(αV2), и построить проекции точек 2(2′,2″) и т. д.
Дополнительные действия:
4-е действие. Соединить проекции построенных точек на фронтальной и горизонтальной проекциях предмета плавными кривыми линиями с учетом их видимости на проекциях: на фронтальную проекцию предмета пространственная кривая пересечения проецируется в видимую плоскую кривую второго порядка (участок параболы), поскольку горизонтальная проекция предмета имеет фронтальную симметрию; на горизонтальную проекцию предмета – в участок видимой кривой 4-го порядка сложной формы.
5-е действие. Оформить очерки поверхностей на заданных проекциях предмета с учетом их относительной видимости:
- – на фронтальной проекции – очерк конуса существует влево от точки А(А»), а очерк шара вправо от точки А(А») (несуществующие очерки конуса и шара оставить тонкими линиями);
- – на горизонтальной проекции – окружность основания конуса существует влево от точек В(B’), а окружность основания шара существует вправо от точек В(B’) (несуществующие части окружностей оснований конуса и шара оставить тонкими линиями).
!!! Способ вспомогательных секущих плоскостей позволяет строить одновременно две проекции искомой линии пересечения.
Способ вспомогательных концентрических сфер
Основанием для применения сферы в качестве вспомогательной поверхности-посредника являются две ее характерные особенности:
- – в сфере можно провести через ее центр бесконечное количество осей;
- – сфера может быть соосна любой поверхности вращения; соосные поверхности пересекаются по окружностям, проекции которых легко построить (см. рис. 8.7 и 8.8).
Сфера-посредник образует две пары соосных поверхностей с каждой из заданных поверхностей. Каждая образованная пара соосных поверхностей пересекается по соответствующим окружностям, которые проецируются в прямые, перпендикулярные общей оси каждой пары, и проходят через точки пересечения очерков каждой пары соосных поверхностей.
Применение способа вспомогательных концентрических сфер для построения линии пересечения поверхностей возможно при наличии трех следующих графических условий:
- Пересекаются поверхности вращения (кроме открытого и закрытого тора).
- Общая плоскость симметрии пересекающихся поверхностей является плоскостью уровня; при этом условии точки пересечения очерков на проекции предмета, изображенного на параллельной общей плоскости симметрии плоскости проекций, принадлежат искомой линии пересечения.
- Оси поверхностей пересекаются; точка пересечения осей является центром всех вспомогательных сфер.
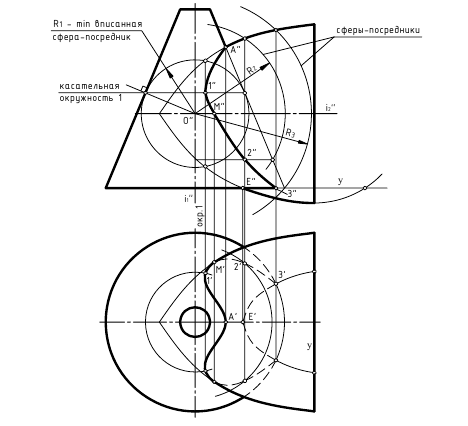
На рис. 8.13 показан пример построения проекций линии пересечения усеченного конуса и тороида (самопересекающийся тор).
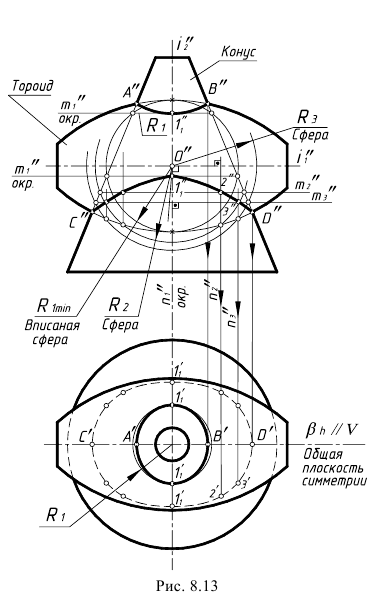
Рассмотренный способ вспомогательных секущих плоскостей здесь применять не следует, так как ни одна плоскость уровня не пересекает поверхности одновременно по окружностям (одно из условия применения).
Для решения задачи требуется предварительно выполнить графический анализ заданных проекций предмета.
А. Выбираем для решения задачи способ вспомогательных концентрических сфер, так как здесь соблюдены три графических условия его применения:
- – пересекаются поверхности вращения – прямой круговой конус и тороид (самопересекающийся тор);
- – общая плоскость симметрии геометрических тел β(βН) является фронтальной плоскостью уровня;
- – оси поверхностей пересекаются в точке O(O») – центр всех вспомогательных сфер.
Б. Решение задачи, то есть введение вспомогательных сфер-посредников начинаем на фронтальной проекции предмета, так как общая плоскость симметрии является фронтальной плоскостью уровня и точки A(A»), B(B»), C(C») и D(D») пересечения фронтальных очерков принадлежат линии пересечения.
В. Определяем границы введения сфер – это точки C(C») и D(D») пересечения фронтальных очерков пересекающихся геометрических тел. Построить проекции точек линии пересечения, выполнив действия предложенного графического алгоритма I.
1-е действие. Ввести на фронтальной проекции вспомогательную сферу-посредник минимального радиуса R1min, с центром в точке O(O»), вписанную в тороид (минимальная сфера-посредник должна вписываться в одну из поверхностей, а с другой поверхностью – пересекаться).
2-е действие. Построить проекции вспомогательных окружностей пересечения двух пар соосных поверхностей, образованных сферой-посредником с каждой заданной поверхностью:
- – первая пара соосных поверхностей – сфера-посредник и тороид – имеют горизонтальную общую ось i1» и пересекаются по окружности касания n1«, которая проецируется в прямую линию (совпадает с осью конуса);
- – вторая пара соосных поверхностей – сфера-посредник и конус имеют вертикальную общую ось вращения i2» и пересекаются по двум вспомогательным окружностям m1«, которые проецируются в прямые линии;
3-е действие. Определить точки 1(11«) пересечения построенных проекций вспомогательных окружностей m1» и n1«, которые принадлежат искомым линиям пересечения (по две пары совпадающих точек).
!!! Здесь имеет место случай полного проницания (II случай), и линия пересечения распадается на две замкнутые кривые.
Дополнительные действия:
4-е действие. Повторить действия основного графического алгоритма, введя вспомогательные сферы большего радиуса R2 и R3 с тем же центром в точке О(О»), и построить следующие пары точек 2(2″) и 3(3″).
4.1. Достроить горизонтальные проекции построенных точек линии пересечения по принадлежности параллелям конуса.
4.2. Соединить проекции построенных точек на фронтальной и горизонтальной проекциях предмета плавными кривыми линиями с учетом их видимости на проекциях (только линия пересечения D’-3′-2′-11‘-C’ будет невидимой на горизонтальной проекции предмета).
5-е действие. Оформить очерки поверхностей на заданных проекциях предмета с учетом их относительной видимости.
Способ вспомогательных эксцентрических сфер
Наименование способа говорит о том, что вспомогательные сферы имеют разные центры, которые и нужно определять в процессе построения проекций линии пересечения поверхностей.
Способ вспомогательных эксцентрических сфер для построения линии пересечения поверхностей возможно применять при наличии трех следующих графических условий:
1. Пересекаются:
- – поверхности вращения 4-го порядка, т. е. торовые поверхности – открытый или закрытый тор;
- – поверхности эллиптических цилиндра и конуса, имеющие круговые сечения.
2. Общая плоскость симметрии поверхностей является плоскостью уровня.
3. Оси поверхностей пересекаются или скрещиваются.
Поскольку в этом способе центр каждой вспомогательной сферы нужно определять графическими построениями, первое действие графического алгоритма для построения проекций точек линии пересечения дополняется построением центра каждой вспомогательной сферы.
Порядок графических действий для построения линий пересечения способом вспомогательных эксцентрических сфер показан на двух примерах.
На рис. 8.14 показан пример построения проекции линии пересечения профильно-проецирующего цилиндра с поверхностью четвертой части открытого тора. Задача решается способом вспомогательных эксцентрических сфер, так как здесь соблюдены три необходимых условия для применения этого способа:
- – одна из пересекающихся поверхностей – открытый тор, имеющий круговые сечения во фронтально-проецирующих плоскостях, проходящих через его ось вращения i»m;
- – общая плоскость симметрии поверхностей – фронтальная плоскость уровня (подразумевается), поэтому точка A(A») пересечения фронтальных очерков принадлежит искомой линии пересечения;
- – оси поверхностей iц и im скрещиваются.
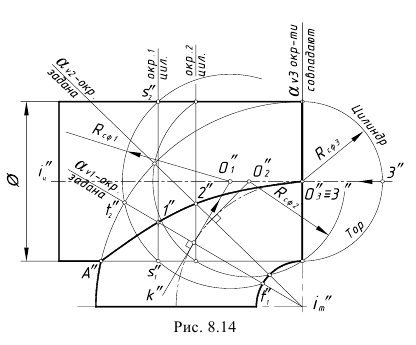
Построение проекций точек линии пересечения поверхностей выполняется на заданной фронтальной проекции предмета по предлагаемому графическому алгоритму II.
Графический алгоритм II.
1-е действие. Ввести вспомогательную сферу, выполнив предварительно следующие графические действия.
1.1. Задать произвольное круговое сечение поверхности тора фронтально-проецирующей плоскостью αV1, проходящей через его ось i»m; окружность t1-t2, (ее проекция – прямая линия t»1-t»2) – это заданная линия пересечения тора с искомой вспомогательной сферой, центр которой должен лежать на перпендикуляре к проекции этой окружности – прямой t»1-t»2 (хорда окружности, в которую проецируется вспомогательная сфера).
1.2. Провести к прямой t»1-t»2 через ее середину перпендикуляр k» и на его пересечении с осью цилиндра i»ц определить центр первой вспомогательной сферы – точку O»1.
1.3. Провести окружность – проекцию вспомогательной сферы-посредника – с центром в точке O»1, радиус которой Rсф.1 определяется расстоянием от точки О»1 до одной из крайних точек t»1 или t»2 прямой t»1-t»2.
2-е действие. Построить проекцию окружности пересечения построенной сферы-посредника с поверхностью соосного ей цилиндра – это прямая s»1-s»2, проходящая через точки s»1 и s»2 пересечения очерков цилиндра и сферы-посредника.
3-е действие. Определить на пересечении построенных проекций заданной окружности t»1-t»2 и построенной окружности s»1-s»2 совпадающие точки 1(1″), принадлежащие искомой линии пересечения заданных поверхностей.
Дополнительные действия:
4-е действие. Повторить действия графического алгоритма и построить достаточное количество точек линии пересечения. В данном примере дополнительными сечениями вспомогательных плоскостей αV2 и αV3 и вспомогательными сферами Rсф.2 и Rсф.3 с центрами O2 и O3 построены точки 2 и 3, принадлежащие линии пересечения. Причем в плоскости αV3 окружности сечений совпадают и совпадающие точки 3 делят существование этих окружностей на две половины – верхняя часть принадлежит цилиндру, а нижняя – тору.
5-е действие. Соединить на фронтальной проекции точки A»-1″-2″-3″ линии пересечения плавной видимой кривой.
6-е действие. Оформить очерки поверхностей на заданной проекции.
На рис. 8.15 показан пример построения линии пересечения наклонного кругового цилиндра Ц1 с осью i»1 и наклонного эллиптического цилиндра с осью i»2, у которого есть круговые сечения в горизонтальных плоскостях уровня.
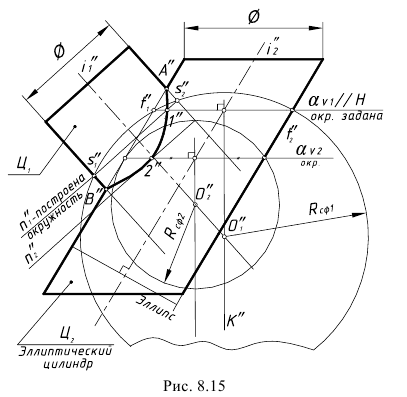
Выполнить графический анализ условия и исключить нерациональный способ решения задачи.
Рассмотренный способ вспомогательных секущих плоскостей применять не следует, так как на заданной фронтальной проекции ни одна плоскость уровня не пересекает поверхности одновременно по окружностям или образующим (одно из условий применения).
Рассмотренный способ вспомогательных концентрических сфер применять нельзя, так как проведенные сферы с центром в точке пересечения осей образуют соосные пары только с одной заданной поверхностью Ц1 (одно из условий применения).
Выбираем для решения задачи способ вспомогательных эксцентрических сфер, так как здесь соблюдены три условия его применения:
- – пересекаются наклонный круговой цилиндр Ц1 и эллиптический цилиндр Ц2 (поверхность не вращения);
- – общая плоскость симметрии поверхностей является фронтальной плоскостью уровня (подразумевается);
- – оси поверхностей i1 и i2 – пересекаются.
Решение задачи, то есть введение сечений цилиндра Ц2 (параллельных заданному) горизонтальными плоскостями уровня α, начинаем на фронтальной проекции предмета, так как общая плоскость симметрии является фронтальной плоскостью уровня и точки A(A») и B(B») пересечения фронтальных очерков принадлежат линии пересечения.
Определяем границы введения сечений цилиндра Ц2 – это точки A(A») и B(B») пересечения фронтальных очерков пересекающихся геометрических тел.
Построить проекции точек линии пересечения поверхностей, выполнив действия предложенного графического алгоритма II.
Графический алгоритм II.
1-е действие. Ввести вспомогательную сферу, выполнив предварительные графические действия.
1.1. Задать произвольное круговое сечение эллиптического цилиндра Ц2 горизонтальной плоскостью αV1 – прямую t1-t2. Эта заданная линия t1-t2 – окружность пересечения эллиптического цилиндра с искомой вспомогательной сферой, центр которой лежит на перпендикуляре, проведенном из середины этой прямой.
1.2. Провести к прямой t1-t1 через ее середину перпендикуляр k» и на пересечении с осью i1 кругового цилиндра Ц1 определить точку О1 – центр первой вспомогательной сферы-посредника.
1.3. Провести окружность сферы-посредника радиусом Rсф.1, который определяется расстоянием от точки О»1 до одной из точек t»1 или t»2 прямой t1-t2.
2-е действие. Построить проекцию окружности пересечения сферы посредника с соосной ей поверхностью кругового цилиндра Ц1 – это прямая s1-s2, проходящая через точки пересечения очерков сферы и цилиндра.
3-е действие. Определить на пересечении заданной окружности t1«-t2» и построенной окружности s1«-s2» совпадающие точки 1(1″), принадлежащие искомой линии пересечения.
Дополнительные действия.
4-е действие. Повторить действия графического алгоритма II и построить проекции точек 2(2″);
5-е действие. Соединить на фронтальной проекции точки А»-1″-2″-B» линии пересечения плавной видимой кривой.
6-е действие. Оформить очерки поверхностей на заданной проекции.
Структуризация материала восьмой лекции в рассмотренном объеме схематически представлена на рис. 8.16 (лист 1). На последующих листах 2–5 приведены иллюстрации к этой схеме для быстрого визуального закрепления изученного материала при повторении (рис. 8.17–8.20).
Пересечение поверхностей:
Частный случай 1. Обе пересекающиеся поверхности проецирующие
Частный случай 2. Одна из двух пересекающихся поверхностей проецирующая
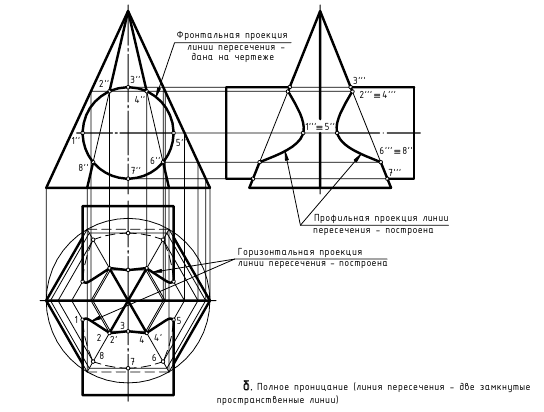
Частный случай 3. Соосные поверхности вращения (с общей осью i)
Частный случай 4. Пересечение поверхностей вращения 2-го порядка, описанных вокруг сферы
Общие случаи пересечения поверхностей:
1. Способ вспомогательных секущих плоскостей
а. Одностороннее касание (две замкнутые пространственные линии пересечения касаются в одной точке К)
Графический алгоритм:
- Ввести плоскость-посредник (горизонтальная плоскость α/αV3).
- Построить линии пересечения плоскости-посредника с каждой поверхностью (окружности радиусом R3К и R3m).
- Определить точки (3), принадлежащие искомой линии пересечения (на пересечении построенных окружностей радиусами R3К и R3m).
- Повторить алгоритм необходимое число раз.
- Способ вспомогательных концентрических сфер
б. Частичное врезание (линия пересечения — замкнутая пространственная линия)
Графический алгоритм:
- Ввести сферу-посредник (R1min минимальная вписанная сфера-посредник)
- Построить линии пересечения сферы-посредника с каждой поверхностью (касательная окр.1 и окр.1, пересечение соосных поверхностей)
- Определить точки 1, принадлежащие искомой линии пересечения (на пересечении построенных проекций окружностей 1)
- Повторить алгоритм необходимое число раз, увеличивая радиусы сфер-посредников
- Способ вспомогательных эксцентрических сфер
в. Полное проницание (линия пересечения распадается на две замкнутые пространственные линии)
Графический алгоритм:
I. Предварительные действия для определения центра вспомогательной сферы-посредника
1. Задать проекцию окружности (прямая S1-S2), по которой вспомогательная плоскость α/αV1) пересекает поверхность открытого тора.
2. Провести через середину этой проекции перпендикуляр к ней до пересечения с осью конуса — на пересечении определяется центр первой сферы-посредника О1(О»).
II. Основные действия
3. Ввести сферу-посредник радиусом R1 с центром в т. О1(О1«).
4. Построить линии пересечения сферы-посредника с каждой поверхностью (заданная окружность S1 -S2 и две построенные окружности n1 и n2).
5. Определить точки 11» и 12», принадлежащие искомой линии пересечения (на пересечении линий S1 -S2 (S1«-S2«) и n1» и n2».
Образец взаимного пересечения поверхностей
Линия пересечения двух поверхностей — это геометрическое место точек, принадлежащих одновременно обеим поверхностям.
Общим способом построения точек, принадлежащих кривой взаимного пересечения поверхностей, является способ вспомогательных поверхностей посредников. Этот способ заключается в следующем.
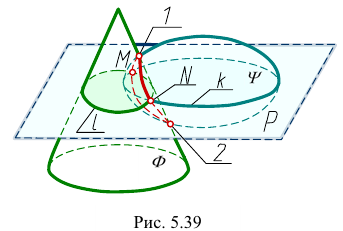
Пусть даны некоторые взаимно пересекающиеся поверхности  (рис. 5.39).
(рис. 5.39).
Введем плоскость-посредник Р, которая пересечет поверхности по линиям  Пересечение линий даст точки
Пересечение линий даст точки  принадлежащие кривой пересечения. Применяя ряд посредников, получаем семейство точек линии пересечения. В качестве посредников наиболее часто применяют плоскости и шаровые поверхности — сферы. В зависимости от вида поверхностей посредников можно выделить следующие способы построения линии пересечения двух поверхностей:
принадлежащие кривой пересечения. Применяя ряд посредников, получаем семейство точек линии пересечения. В качестве посредников наиболее часто применяют плоскости и шаровые поверхности — сферы. В зависимости от вида поверхностей посредников можно выделить следующие способы построения линии пересечения двух поверхностей:
- а) способ вспомогательных секущих плоскостей;
- б) способ вспомогательных сфер.
При построении линии взаимного пересечения поверхностей необходимо сначала строить опорные точки кривой. Эти точки дают пределы линии пересечения. Между ними и следует определять промежуточные (случайные) точки.
- Собственные тени поверхностей вращения
- Построение падающих теней
- Проекции с числовыми отметкам
- Гранные поверхности
- Тени в ортогональных проекциях
- Кривые поверхности
- Пересечения криволинейных поверхностей
- Пересечения поверхностей с прямой и плоскостью
Содержание:
- Пересечение тела вращения плоскостью особого положения
- Пересечение тела вращения линией
- Способ вспомогательной секущей плоскости особого положения
- Способ вспомогательной секущей плоскости общего положения
- Способы преобразования комплексного чертежа
- Способ вспомогательной секущей цилиндрической поверхности
- Метод последовательных приближений
- Пересечение тела вращения плоскостью общего положения
- Способ вспомогательных секущих плоскостей особого положения
- Способ замены плоскостей проекций
- Пересечения тела вращения с многогранником
- Способ вспомогательных секущих плоскостей уровня
- Способ вспомогательных проецирующих секущих плоскостей
- Пересечение двух тел вращения
- Способ плоскостей — посредников особого положения
- Способ плоскостей-посредников общего положения
- Способ конических поверхностей
- Способы вспомогательных сфер
- Теорема Монжа
- Способ вспомогательных концентрических сфер
- Способ вспомогательных эксцентрических сфер
- Свойства линий пересечения тел вращения
Проецирование тел вращения — это тела вращения ограничены поверхностями, которые получаются в результате вращения какой либо линии вокруг неподвижной оси. Линия которая при своем движении образует поверхность, называется образующей, а линия, по которой она перемещается – направляющей.
Пересечение тела вращения плоскостью особого положения
Тела вращения — это тела, ограниченные поверхностями вращения (см. п. 3.2.2.2, рис. 3.63). Линия k пересечения тела вращения Ф плоскостью Σ имеет алгебраический порядок, равный алгебраическому порядку поверхности тела Ф. Например, тор (поверхность четвертого порядка) пересекается плоскостью Σ по кривой максимум четвертого порядка (рис. 4.16). В некоторых случаях линия k раскладывается на две и больше линий.
Линия k пересечения тела вращения Ф плоскостью Σ строится приближённо по точкам 1, 2, …, являющимся точками пересечения секущей плоскости Σ с образующими и направляющими (меридианами и параллелями) тела Ф. При этом обязательно требуется обозначать особые точки и линии фигуры сечения: оси симметрии, точки перегиба, точки перехода от видимого контура к невидимому и т.д.
Некоторые фигуры пересечения тел вращения секущими плоскостями приведены в табл. 4.1. Соответствующие комплексные чертежи изображены на рис. 4.13..

Необходимо отметить, что линии, показанные в табл. 4.1, проецируются на плоскости проекций в искажённом виде. Например, окружность может проецироваться в эллипс или отрезок.
В случае, если секущая плоскость Σ является проецирующей (рис. 4.13), одна из проекций искомой фигуры k сечения является отрезком, принадлежащим соответствующему следу секущей плоскости. Неизвестные проекции точек 1, 2, … фигуры k сечения находятся с использованием вспомогательных линий  …, которые принадлежат поверхности тела вращения Ф. Для сферы, цилиндра, конуса и тора такими линиями являются окружности, принадлежащие плоскости уровня (рис. 4.14 – 4.16). Кроме того, на поверхности цилиндра и конуса такими линиями могут быт прямые линии(рис. 4.15).
…, которые принадлежат поверхности тела вращения Ф. Для сферы, цилиндра, конуса и тора такими линиями являются окружности, принадлежащие плоскости уровня (рис. 4.14 – 4.16). Кроме того, на поверхности цилиндра и конуса такими линиями могут быт прямые линии(рис. 4.15).
На рис. 4.14 сфера Ф пересечена фронтально-проецирующей плоскостью Σ. Линией пересечения является окружность, которая проецируется на П2 в отрезок, на П1, П3 – в эллипс. Для построения горизонтальной проекции линии пересечения на её фронтальной проекции выбираются точки 1 . Для уточнения формы кривой на П1 можно выбирать дополнительные точки. Точки 1 – 8 обязательны для выбора, т.к. являются характерными:
. Для уточнения формы кривой на П1 можно выбирать дополнительные точки. Точки 1 – 8 обязательны для выбора, т.к. являются характерными:
а) точки 1, 5 – точки перигея (ближайшие к его центру) на П1;
б) точки 3, 7 – точки апогея (наиболее удалённые от его центра) на П1. Их фронтальные проекции совпадают с основой перпендикуляра, проведенного из центра сферы О2 до секущей плоскости;
в) точки 2, 8 – точки перехода от видимого контура к невидимому на П1;
г) точки 4, 6 – точки перехода от видимого контура к невидимому на П3.
Для определения горизонтальной проекции точек 2, 8 вводится плоскость  горизонтального уровня, проходящая через данные точки и пересекающая сферу по окружности, которая проецируется в натуральную величину на П1. С помощью вертикальной линии проекционной связи, проведенной из проекции
горизонтального уровня, проходящая через данные точки и пересекающая сферу по окружности, которая проецируется в натуральную величину на П1. С помощью вертикальной линии проекционной связи, проведенной из проекции  определяются проекции 21, 81. Аналогично определяются проекции
определяются проекции 21, 81. Аналогично определяются проекции  . Профильная проекция линии пересечения определяется с помощью линий проекционной связи.
. Профильная проекция линии пересечения определяется с помощью линий проекционной связи.

 Фигуры плоских сечений тел вращения
Фигуры плоских сечений тел вращения
На рис. 4.15 конус пересечён фронтально-проецирующей плоскостью Σ, параллельной её образующей линии. Линией пересечения является парабола, которая проецируется на П2 в отрезок, а на П1, П3 – в параболы. Для построения горизонтальной проекции линии пересечения на её фронтальной проекции выбираются точки Характеристики точек параболы:
Характеристики точек параболы:
а) точки 1, 7 – точки, принадлежащие основе конуса;
б) точки 2, 6 – точки перехода от видимого контура к невидимому на П3;
в) точка 4 – точка перегиба (наивысшая точка параболы);
г) точки 3, 5 – вспомогательные, которые уточняют форму параболы на её участках 2 – 4, 4 – 6.
Для определения горизонтальной проекции точек 2, 6 вводится плоскость  горизонтального уровня, проходящая через данные точки и пересекающая конус по окружности, которая проецируется в натуральную величину на П1. С помощью вертикальной линии проекционной связи, проведенной из проекций
горизонтального уровня, проходящая через данные точки и пересекающая конус по окружности, которая проецируется в натуральную величину на П1. С помощью вертикальной линии проекционной связи, проведенной из проекций  определяются проекции
определяются проекции  . Аналогично определяются проекции
. Аналогично определяются проекции  Для определения горизонтальной проекции точек 3, 5 вводится фронтально-проецирующая плоскость
Для определения горизонтальной проекции точек 3, 5 вводится фронтально-проецирующая плоскость  проходящая через данные точки и вершину S конуса, пересекая конус по треугольнику SAB, горизонтальная проекция S1A1B1 которого находится с помощью линий проекционной связи. Проекции
проходящая через данные точки и вершину S конуса, пересекая конус по треугольнику SAB, горизонтальная проекция S1A1B1 которого находится с помощью линий проекционной связи. Проекции  принадлежат отрезкам S1A1, S1B1. Профильная проекция линии пересечения определяется с помощью линий проекционной связи.
принадлежат отрезкам S1A1, S1B1. Профильная проекция линии пересечения определяется с помощью линий проекционной связи.

 Плоское сечение сферы
Плоское сечение сферы

 Плоское сечение конуса
Плоское сечение конуса
На рис. 4.16 тор пересечён плоскостью Σ горизонтального уровня. Линией пересечения является ветвь лемнискаты Бута, которая проецируется на П2 в отрезок, на П1 – в натуральную величину. Для построения горизонтальной проекции линии пересечения вводят семью плоскостей  фронтального уровня, пересекающую тор по концентрическим окружностям
фронтального уровня, пересекающую тор по концентрическим окружностям  с центром О. Эти окружности пересекают секущую плоскость Σ в точках 1 – 8, принадлежащих искомой кривой. С помощью вертикальных линий проекционной связи, проведенных из проекций
с центром О. Эти окружности пересекают секущую плоскость Σ в точках 1 – 8, принадлежащих искомой кривой. С помощью вертикальных линий проекционной связи, проведенных из проекций  определяются горизонтальные проекции
определяются горизонтальные проекции  принадлежащие горизонтальным проекциям линий l (1) – l (8) .
принадлежащие горизонтальным проекциям линий l (1) – l (8) .
Характеристики точек искомой кривой:
а) точка 1 — точка перегиба (крайняя левая точка);
б) точки 3, 7 – точки перехода от видимого контура к невидимому на П1;
в) точка 5 — особая точка лемнискаты Бута;
г) точки 4, 6 –вспомогательные точки.

 Плоское сечение тора
Плоское сечение тора
Пересечение тела вращения линией
Линия пересечения поверхности вращения проецирующей плоскостью представляет собой плоскую замкнутую кривую. Для построения этой кривой определяем точки пересечения ряда образующих поверхности с секущей плоскостью. К опорным точкам линии относятся: экс-тремальные (высшая, низшая, ближняя, дальняя, левая, правая) и очерковые.
Способ вспомогательной секущей плоскости особого положения
Для определения точек пересечения тела вращения прямой используется способ вспомогательной секущей плоскости особого положения. На рис. 4.17 а прямой круговой цилиндр пересекается прямой l общего положения. Для определения точек М, N пересечения прямой l с цилиндром через эту прямую проводится горизонтально-проецирующая плоскость Σ. Линия пересечения этой плоскости с цилиндром — это прямоугольник (заштрихованная фигура), фронтальная проекция которого пересекается с  в точках М2, N2, являющихся фронтальными проекциями искомых точек M, N. Видимость отрезков прямой l определяется способами, описанными в п. 1.4.7.
в точках М2, N2, являющихся фронтальными проекциями искомых точек M, N. Видимость отрезков прямой l определяется способами, описанными в п. 1.4.7.
На рис. 4.17 б для определения точек М, N пересечения прямой l с цилиндром через прямую проводится фронтально-проецирующая плоскость Ω. Линия пересечения этой плоскости с цилиндром — это эллипс, который проецируется на П1 в окружность (заштрихованная фигура ). Горизонтальная проекция полученной фигуры сечения пересекается с l1 в точках М1, N1, являющихся горизонтальными проекциями искомых точек M, N. Фронтальные проекции М2, N2 определяются с помощью линий проекционной связи.

 Определение точек пересечения прямой общего положения с цилиндром
Определение точек пересечения прямой общего положения с цилиндром
На рис. 4.18 а конус пересекается с горизонталью h. Для определения точек М, N пересечения прямой h с конусом через горизонталь проводится плоскость Σ горизонтального уровня. Линия пересечения этой плоскости с цилиндром — это окружность (заштрихованная фигура), горизонтальная проекция которой пересекается с h1 в точках М1, N1, являющимися горизонтальными проекциями искомых точек M, N. Фронтальные проекции М2, N2 определяются с помощью линий проекционной связи .

 Определение точек пересечения прямой особого положения с конусом
Определение точек пересечения прямой особого положения с конусом
На рис. 4.18 б конус пересекается с горизонтально-проецирующей прямой u. Для определения точек М, N пересечения прямой u с конусом через эту прямую проводится горизонтально-проецирующая плоскость Ω, проходящая через вершину S конуса. Линия пересечения этой плоскости с конусом — это треугольник (заштрихованная фигура), фронтальная проекция которого пересекается с  в точках М2, N2, которые являются фронтальными проекциями искомых точек M, N. Горизонтальные проекции М1, N1 совпадают с
в точках М2, N2, которые являются фронтальными проекциями искомых точек M, N. Горизонтальные проекции М1, N1 совпадают с 
На рис. 4.19 тор пересекается с горизонтально-проецирующей прямой u. Для определения точек М, N пересечения прямой u тором через эту прямую проводится плоскость Σ фронтального уровня. Линия пересечения этой плоскости с тором является круговым кольцом (контур заштрихованной фигуры) с центром в точке О. Фронтальная проекция кольца пересекается с в точках М2, N2, которые являются фронтальными проекциями искомых точек M, N. Горизонтальные проекции М1, N1 совпадают с

 Определение точек пересечения тора с проецирующей прямой
Определение точек пересечения тора с проецирующей прямой
Способ вспомогательной секущей плоскости общего положения
Для определения точек пересечения тела вращения прямой общего положения могут быть использованы способы вспомогательной секущей плоскости общего положения, преобразования комплексного чертежа (см. п. 4.2.2.3), метод последовательных приближений (см. п. 4.2.2.5).
На рис. 4.20 конус пересекается прямой l общего положения. Для определения точек M, N их пересечения через прямую l и вершину S конуса проводится плоскость Σ общего положения. Находится горизонтальный след  этой плоскости Σ, для чего на прямой l произвольно выбираются вспомогательные точки 1, 2, через которые проходят прямые а, b. По горизонтальным следам прямых a, b строится горизонтальный след
этой плоскости Σ, для чего на прямой l произвольно выбираются вспомогательные точки 1, 2, через которые проходят прямые а, b. По горизонтальным следам прямых a, b строится горизонтальный след  секущей плоскости Σ. Этот след пересекает основу конуса в точках А, В. Треугольник SAB является линией пересечения конуса плоскостью Σ. Точки М, N пересечения прямой l с этим треугольником — искомые точки пересечения конуса прямой l.
секущей плоскости Σ. Этот след пересекает основу конуса в точках А, В. Треугольник SAB является линией пересечения конуса плоскостью Σ. Точки М, N пересечения прямой l с этим треугольником — искомые точки пересечения конуса прямой l.
На рис. 4.21 показана другая, упрощённая реализация способа вспомогательной секущей плоскости общего положения на примере эллиптического конуса. Вводится секущая плоскость Σ, проходящая через вершину S и прямую l. В этой плоскости вводятся две взаимно параллельные горизонтали  и определяется горизонтальный след
и определяется горизонтальный след  с помощью вспомогательных точек 1, 2 пересечения l с этими горизонталями. След
с помощью вспомогательных точек 1, 2 пересечения l с этими горизонталями. След  , параллельный h1, пересекает основу конуса в точках А, В. Треугольник SAB является линией пересечения конуса плоскостью Σ. Точки М, N пересечения прямой l с этим треугольником являются искомыми точками пересечения конуса прямой l.
, параллельный h1, пересекает основу конуса в точках А, В. Треугольник SAB является линией пересечения конуса плоскостью Σ. Точки М, N пересечения прямой l с этим треугольником являются искомыми точками пересечения конуса прямой l.

 Способ вспомогательной секущей плоскости общего положения
Способ вспомогательной секущей плоскости общего положения
На рис. 4.22 эллиптический цилиндр пересекается прямой l общего положения. Для определения точек M, N их пересечения через прямую l параллельно оси і цилиндра проводится плоскость Σ общего положения. Находится горизонтальный след  этой плоскости Σ, для чего на прямой l произвольно выбираются вспомогательные точки 1, 2, через которые проходят лучи а, b, параллельные оси і цилиндра. По горизонтальным следам этих лучей строятся горизонтальный след плоскости Σ. Этот след пересекает основу цилиндра в точках А, В. Прямоугольник АBСD — линия пересечения цилиндра плоскостью Σ. Точки М, N пересечения прямой l с этим прямоугольником — искомые точки пересечения цилиндра прямой l.
этой плоскости Σ, для чего на прямой l произвольно выбираются вспомогательные точки 1, 2, через которые проходят лучи а, b, параллельные оси і цилиндра. По горизонтальным следам этих лучей строятся горизонтальный след плоскости Σ. Этот след пересекает основу цилиндра в точках А, В. Прямоугольник АBСD — линия пересечения цилиндра плоскостью Σ. Точки М, N пересечения прямой l с этим прямоугольником — искомые точки пересечения цилиндра прямой l.
На рис. 4.23 показана другая, упрощенная реализация способа вспомогательной секущей плоскости общего положения. Вводится секущая плоскость Σ, проходящая через прямую l параллельно оси і цилиндра. Эта плоскость задана прямыми l, m (прямая  параллельна оси і). Определяется горизонтальный след
параллельна оси і). Определяется горизонтальный след  как линия, проходящая через горизонтальные следы прямых l, m. След
как линия, проходящая через горизонтальные следы прямых l, m. След  пересекает основу цилиндра в точках А, В. Прямоугольник ABCD является линией пересечения цилиндра плоскостью Σ. Точки М, N пересечения прямой l с этим прямоугольником — искомые точки пересечения цилиндра прямой l.
пересекает основу цилиндра в точках А, В. Прямоугольник ABCD является линией пересечения цилиндра плоскостью Σ. Точки М, N пересечения прямой l с этим прямоугольником — искомые точки пересечения цилиндра прямой l.
Конус или цилиндр называется эллиптическим, если его нормальное сечение(сечение плоскостью, перпендикулярной оси тела) является эллипсом. Эллиптические конус и цилиндр не являются телами вращения. Методы начертательной геометрии, описанные для эллиптических конуса и цилиндра, применяются и для случая прямых круговых конуса и цилиндра.

 Определение точек пересечения эллиптического конуса с прямой общего положения
Определение точек пересечения эллиптического конуса с прямой общего положения

 Определение точек пересечения эллиптического цилиндра с прямой общего положения
Определение точек пересечения эллиптического цилиндра с прямой общего положения

 Упрощенная реализация способа вспомогательной секущей плоскости общего положения
Упрощенная реализация способа вспомогательной секущей плоскости общего положения
Способы преобразования комплексного чертежа
Способ вспомогательной секущей плоскости особого положения достаточно громоздкий, поэтому сложный в графической реализации. Для некоторых тел (например, для сферы) он недопустим.
Способы преобразования комплексного чертежа предназначены для упрощения процедуры определения точек пересечения прямой с телом. Как правило, используются способы замены плоскостей проекций и вращения вокруг проецирующей оси. Они позволяют перевести заданную прямую из общего положения в особое для дальнейшего использования способа вспомогательной секущей плоскости особого положения.
На рис. 4.24 определены точки M, N пересечения сферы прямой l общего положения с использованием способа замены плоскостей проекций. Введена вспомогательная плоскость проекций П4, параллельная прямой l (ось  параллельна l1). Прямая l занимает положение уровня в системе плоскостей П1, П4. Для определения проекции
параллельна l1). Прямая l занимает положение уровня в системе плоскостей П1, П4. Для определения проекции  вводятся вспомогательные точки 1, 2. Через прямую l проводится плоскость Σ, параллельная плоскости П4, и определяется проекция на П4 линии (окружности) пересечения сферы плоскостью Σ (заштрихованная область). Проекции M4, N4 искомых точек M, N являются точками пересечения проекции l4 с полученной окружностью.
вводятся вспомогательные точки 1, 2. Через прямую l проводится плоскость Σ, параллельная плоскости П4, и определяется проекция на П4 линии (окружности) пересечения сферы плоскостью Σ (заштрихованная область). Проекции M4, N4 искомых точек M, N являются точками пересечения проекции l4 с полученной окружностью.
На рис. 4.25 определены точки M, N пересечения сферы прямой l общего положения с использованием способа вращения вокруг проецирующей оси. Вводится горизонтально — проецирующая ось і, проходящая через центр О сферы. Прямая l вращается вокруг этой оси до фронтального положения уровня вместе со сферой. При этом проекции сферы не изменяются. Для определения проекций нового, фронтального положения прямой l вводятся вспомогательные точки 1, 2. Через прямую проводится плоскость Σ фронтального уровня, и определяется фронтальная проекция линии (окружности) пересечения сферы плоскостью Σ (заштрихованная область). По проекциям  определяются проекции искомых точек M, N пересечения прямой l со сферой.
определяются проекции искомых точек M, N пересечения прямой l со сферой.

 Способ замены плоскостей проекций
Способ замены плоскостей проекций

 Способ вращения вокруг проецирующей оси
Способ вращения вокруг проецирующей оси
На рис. 4.26 определены точки K, L, M, N пересечения тора прямой l общего положения с применением способа вращения вокруг проецирующей оси. Прямая l вращается вокруг фронтально-проецирующей оси j тора до горизонтального положения  вместе с тором. При этом проекции тора не изменяются. Для определения проекций нового, горизонтального положения
вместе с тором. При этом проекции тора не изменяются. Для определения проекций нового, горизонтального положения  прямой l вводятся вспомогательные точки 1, 2. Через прямую
прямой l вводятся вспомогательные точки 1, 2. Через прямую  проводится плоскость Σ горизонтального уровня, и определяется фронтальная проекция линий (двух окружностей) пересечения тора плоскостью Σ (заштрихованные области). По проекциям
проводится плоскость Σ горизонтального уровня, и определяется фронтальная проекция линий (двух окружностей) пересечения тора плоскостью Σ (заштрихованные области). По проекциям  находятся проекции искомых точек K, L, M, N пересечения прямой l с тором. Надо отметить, что для реализации приведённого способа необходимо, чтобы прямая l пересекала ось j тора (проекция l2 проходит через точку О2).
находятся проекции искомых точек K, L, M, N пересечения прямой l с тором. Надо отметить, что для реализации приведённого способа необходимо, чтобы прямая l пересекала ось j тора (проекция l2 проходит через точку О2).

 Определение точек пересечение тора с прямой общего положения
Определение точек пересечение тора с прямой общего положения
На рис. 4.27 определены точки M, N пересечения эллипсоида прямой l общего положения с применением способа вращения вокруг проецирующей оси. Прямая l вращается вокруг горизонтально-проецирующей оси і эллипсоида до фронтального положения  вместе с телом. При этом проекции эллипсоида не изменяются. Для определения проекций нового фронтального положения
вместе с телом. При этом проекции эллипсоида не изменяются. Для определения проекций нового фронтального положения  прямой l вводятся вспомогательные точки 1, 2. Через прямую l
прямой l вводятся вспомогательные точки 1, 2. Через прямую l проводится плоскость Σ фронтального уровня, и определяется фронтальная проекция линии (эллипса) пересечения тела плоскостью Σ (заштрихованная область). По проекциям
проводится плоскость Σ фронтального уровня, и определяется фронтальная проекция линии (эллипса) пересечения тела плоскостью Σ (заштрихованная область). По проекциям  определяются проекции искомых точек M, N пересечения прямой l с эллипсоидом. Необходимо отметить, что для реализации приведенного способа необходимо, чтобы прямая l пересекала ось і тора (проекция l1 проходит через точку О1).
определяются проекции искомых точек M, N пересечения прямой l с эллипсоидом. Необходимо отметить, что для реализации приведенного способа необходимо, чтобы прямая l пересекала ось і тора (проекция l1 проходит через точку О1).

 Определение точек пересечения эллипсоида с прямой общего положения
Определение точек пересечения эллипсоида с прямой общего положения
Способ вспомогательной секущей цилиндрической поверхности
Для определение точек пересечения тела вращения пространственной кривой линией используются способ вспомогательной секущей цилиндрической поверхности особого положения и метод последовательных приближений (см. п. 4.2.2.5).
Способ вспомогательной секущей цилиндрической поверхности базируется на том, что через любую пространственную кривую l можно провести цилиндрическую поверхность Ω, которая проецируется на одну из плоскостей проекций (например, П1) в линию Ω1, совпадающую с соответствующей проекцией l1 кривой l (рис. 4.28). Другими словами, цилиндрическая поверхность является проецирующей.

 Способ вспомогательной секущей цилиндрической поверхности
Способ вспомогательной секущей цилиндрической поверхности
Суть способа вспомогательной секущей цилиндрической поверхности
Для определения точек М, N, … пересечения тела вращения Ф пространственной кривой l через последнюю проводится проецирующая цилиндрическая поверхность Ω, одна из проекций которой совпадает с соответствующей проекцией линии l. Определяется линия k пересечения тела Ф с поверхностью Ω. Точки M, N, … пересечения линий k, l — искомые точки пересечения тела Ф пространственной кривой l.

 Пересечение кривой с телом вращения
Пересечение кривой с телом вращения
На рис. 4.29 обозначены точки M, N, P, Q пересечения тела вращения Ф пространственной кривой l. Через линию l проводится фронтально-проецирующая цилиндрическая поверхность Ω, фронтальная проекция Ω2 которой совпадает с фронтальною проекцией l2 линии l. Линия k пересечения тела Ф цилиндрической поверхностью Ω строится по точкам 1, 2, …, 7 с помощью способа вспомогательных секущих плоскостей  горизонтального уровня, которые пересекают тело Ф по концентрическим окружностям. Проекции искомых точек M, N, P, Q являются проекциями точек пересечения линий k, l.
горизонтального уровня, которые пересекают тело Ф по концентрическим окружностям. Проекции искомых точек M, N, P, Q являются проекциями точек пересечения линий k, l.
Способ вспомогательной секущей цилиндрической поверхности также может быть использован для определения точек пересечения пространственной кривой с многогранником.
На рис. 4.30 применён способ вспомогательной секущей цилиндрической поверхности для определения точек пересечения кривой l с треугольной пирамидой Ф. Через линию l проводится фронтально-проецирующая цилиндрическая поверхность Ω, фронтальная проекция Ω2 которой совпадает с фронтальной проекцией l2 линии l. Линия k пересечения пирамиды цилиндрической поверхностью Ω строится по точкам 1 – 8 с помощью способа вспомогательных секущих плоскостей  горизонтального уровня, которые пересекают пирамиду по треугольникам. Проекции искомых точек M, N, P, Q — это проекции точек пересечения линий k, l.
горизонтального уровня, которые пересекают пирамиду по треугольникам. Проекции искомых точек M, N, P, Q — это проекции точек пересечения линий k, l.

 Пересечение кривой с многогранником
Пересечение кривой с многогранником
Метод последовательных приближений
Высокий уровень развития современного машиностроения стал возможен благодаря использованию инновационных технологий, в том числе применению систем автоматизированного проектирования на основе ЭВМ. Существующие компьютерные программы базируются на трёхмерном моделировании элементов конструкций и создании на их основе проектной документации.
Наиболее сложными элементами конструкций с точки зрения проекционного сечения являются линии пересечения и перехода двух и больше трёхмерных геометрических объектов – поверхностей, их образующих и направляющих (рис. 4.31). Построение этих объектов принадлежит к позиционным задачам начертательной геометрии, которые решаются путём нахождения геометрического места точек пересечения линий одной поверхности с другой поверхностью.
Задачи на нахождение точек пересечения пространственной кривой l с поверхностью Ф занимает особое место среди задач проекционного черчения. Для их решения используют преимущественно методы преобразования комплексного чертежа и методы, связанные с введением вспомогательных плоскостей или поверхностей Σ (рис. 4.32).

 Применение линий пересечения и перехода
Применение линий пересечения и перехода

 Способ вспомогательной секущей поверхности
Способ вспомогательной секущей поверхности
Основным недостатком существующих способов является прямая зависимость точности построения контура  сечения поверхностей Ф, Σ от количества точек контура. Вследствие этого, для построения проекций линии необходимо вводить значительное количество вспомогательных точек, что усложняет поставленную задачу нагромождением дополнительных построений. Кроме того, участки линии
сечения поверхностей Ф, Σ от количества точек контура. Вследствие этого, для построения проекций линии необходимо вводить значительное количество вспомогательных точек, что усложняет поставленную задачу нагромождением дополнительных построений. Кроме того, участки линии  между вспомогательными точками строятся приближённо путём интерполяции (рис. 4.33).
между вспомогательными точками строятся приближённо путём интерполяции (рис. 4.33).
Стандартные методы не дают возможности создания универсальной процедуры решения задачи на определение точек пересечения линии с поверхностью, а содержат только совокупность алгоритмов для решения преимущественно долгосрочных задач. Эти недостатки свидетельствуют о необходимости поиска и обоснования нового метода, который бы существенно упрощал геометрические построения, не жертвуя точностью последних.
Рассмотрим общий случай задачи на нахождение множества М1, М2, … точек пересечения кривой линии l с поверхностью Ф тела вращения методом последовательных приближений . Количество N точек пересечения обусловлено алгебраическим порядком указанных геометрических объектов. В дальнейшем будем рассматривать задачу на нахождение одной из таких точек М.
Для изложения сути метода последовательных приближений введем ортогональную прямолинейную систему координат Oxyz, в которой ось z совпадает с осью тела вращения (рис. 4.34).В начале геометрических построений будем считать, что точка М находится в плоскости Σ горизонтального уровня. Точка М определяется как точка пересечения плоскости Σ с линией l. Также точка М принадлежит окружности  . По полученной (с использованием условий принадлежности точки М окружности
. По полученной (с использованием условий принадлежности точки М окружности  ) горизонтальной проекции М1 уточняется положение искомой точки. Таким образом, произвольно выбрав положение искомой точки, путём простой итерационной процедуры находится искомое положение.
) горизонтальной проекции М1 уточняется положение искомой точки. Таким образом, произвольно выбрав положение искомой точки, путём простой итерационной процедуры находится искомое положение.

 Метод последовательных приближений
Метод последовательных приближений
Преимущества метода последовательных приближений :
а) точность решения задачи контролируется на каждой итерации;
б) относительно небольшое количество геометрических построений;
в) возможность числовой реализации на ЭВМ;
г) инвариантность алгоритма к типу кривой и поверхности тела вращения.
На рис. 4.35 – 4.37 приведены решения задач на пересечение кривой со сферой, тором и произвольным телом вращения. Эти задачи, как правило, решаются с помощью специальных методов, а именно, проведенным через кривую проецирующей цилиндрической поверхности. На приведённых рисунках задачи решены с помощью метода последовательных приближений .

 Пересечение кривой линии со сферой
Пересечение кривой линии со сферой  Пересечение кривой линии с тором
Пересечение кривой линии с тором

 Пересечение кривой линии с произвольным телом вращения
Пересечение кривой линии с произвольным телом вращения
Пересечение тела вращения плоскостью общего положения
При определении линии пересечения поверхности вращения плоскостью общего положения в качестве поверхностей-посредников используют проецирующие плоскости, перпендикулярные оси вращения. В этом случае линия пересечения проецирующей плоскости с поверхностью вращения дает окружность, а пересечение с плоскостью общего положения – прямую линию.
Способ вспомогательных секущих плоскостей особого положения
Линию пересечения тела вращения Ф плоскостью Σ общего положения можно определить без применения специальных методов только для ограниченных случаев взаимного расположения этих геометрических объектов.

 Пересечение конуса плоскостью
Пересечение конуса плоскостью
На рис. 4.38 конус Ф пересекается плоскостью Σ, заданной треугольником АВС и проходит через вершину S. Плоскость Σ пересекает конус по треугольнику SDE, точки D, E которого является точками пересечения горизонтального следа плоскости АВС с основой конуса. След  строится по двум точкам
строится по двум точкам  – горизонтальным следам прямых АВ, АС секущей плоскости АВС. Линия пересечения конуса Ф плоскостью АВС распадается на два отрезка 1 – 4, 2 – 3, принадлежащих образующим SD, SE конуса Ф. В общем случае линия k пересечения тела вращения Ф плоскостью Σ общего положения строится по точкам 1, 2, …, каждая из которых определяется такими способами:
– горизонтальным следам прямых АВ, АС секущей плоскости АВС. Линия пересечения конуса Ф плоскостью АВС распадается на два отрезка 1 – 4, 2 – 3, принадлежащих образующим SD, SE конуса Ф. В общем случае линия k пересечения тела вращения Ф плоскостью Σ общего положения строится по точкам 1, 2, …, каждая из которых определяется такими способами:
а) способ вспомогательных секущих плоскостей особого положения;
б) способ замены плоскостей проекций и т.д..
Суть способа вспомогательных секущих плоскостей особого положения
Вводится совокупность плоскостей Ω (1) , Ω (2) , …особого положения и определяются линии пересечения этих плоскостей с телом вращения Ф и плоскостью Σ общего положения. Точки пересечения полученных пар линий являются точками искомой линии k пересечения тела вращения Ф плоскостью Σ.
На рис. 4.39 цилиндр Ф пересекается плоскостью Σ, заданной горизонтальным  и фронтальным
и фронтальным  следами. Вводятся секущие плоскости
следами. Вводятся секущие плоскости  горизонтального уровня и определяются линии пересечения этих плоскостей с цилиндром и плоскостью Σ. При этом горизонтальные проекции линии пересечения плоскостей с цилиндром Ф совпадает с проекцией Ф1 (окружностью). Линии пересечения плоскостей с плоскостью Σ являются горизонтальными прямыми уровня
горизонтального уровня и определяются линии пересечения этих плоскостей с цилиндром и плоскостью Σ. При этом горизонтальные проекции линии пересечения плоскостей с цилиндром Ф совпадает с проекцией Ф1 (окружностью). Линии пересечения плоскостей с плоскостью Σ являются горизонтальными прямыми уровня  . Проекции
. Проекции  искомых точек 1 – 7 линии k являются точками пересечения Ф1 с горизонталями
искомых точек 1 – 7 линии k являются точками пересечения Ф1 с горизонталями  С помощью линий проекционной связи определяются проекции
С помощью линий проекционной связи определяются проекции  Полученная фигура k сечения является частью эллипса, на проекциях которого обязательно обозначается точка А перехода от видимого контура к невидимому на П2. Натуральная величина
Полученная фигура k сечения является частью эллипса, на проекциях которого обязательно обозначается точка А перехода от видимого контура к невидимому на П2. Натуральная величина  фигуры сечения k определяется комбинацией способов замены плоскостей проекций и плоскопараллельного перемещения.
фигуры сечения k определяется комбинацией способов замены плоскостей проекций и плоскопараллельного перемещения.

 Пересечение цилиндра плоскостью общего положения
Пересечение цилиндра плоскостью общего положения
На рис. 4.40 конус Ф пересекается плоскостью Σ, заданной горизонтальным  и фронтальным
и фронтальным  следами. Вводятся секущие плоскости
следами. Вводятся секущие плоскости  горизонтального уровня и определяются линии пересечения этих плоскостей с конусом и плоскостью Σ. При этом горизонтальные проекции линии пересечения плоскостей
горизонтального уровня и определяются линии пересечения этих плоскостей с конусом и плоскостью Σ. При этом горизонтальные проекции линии пересечения плоскостей  с конусом Ф являются концентрическими окружностями. Линии пересечения плоскостей
с конусом Ф являются концентрическими окружностями. Линии пересечения плоскостей с плоскостью Σ являются горизонтальными прямыми уровня
с плоскостью Σ являются горизонтальными прямыми уровня  Проекции
Проекции  искомых точек 1 – 7 линии k являются точками пересечения Ф1 с горизонталями
искомых точек 1 – 7 линии k являются точками пересечения Ф1 с горизонталями  С помощью линий проекционной связи определяются проекции
С помощью линий проекционной связи определяются проекции  Полученная фигура k сечения является параболой (секущая плоскость Σ параллельна образующей линии конуса), на проекциях которой обязательно обозначается точка А перехода от видимого контура к невидимому на П2. Натуральная величина
Полученная фигура k сечения является параболой (секущая плоскость Σ параллельна образующей линии конуса), на проекциях которой обязательно обозначается точка А перехода от видимого контура к невидимому на П2. Натуральная величина  фигуры сечения k определяется комбинацией способов замены плоскостей проекций и плоскопараллельного перемещения.
фигуры сечения k определяется комбинацией способов замены плоскостей проекций и плоскопараллельного перемещения.
Недостатки способа секущих плоскостей особого положения :
а) сложность или невозможность определения особых точек фигуры сечения;
б) необходимость дополнительного применения способов преобразования комплексного чертежа для определения натуральной величины фигуры сечения.

 Пересечение конуса плоскостью общего положения
Пересечение конуса плоскостью общего положения
Способ замены плоскостей проекций
Обозначенные выше недостатки способа вспомогательных секущих плоскостей для определения сечения тела вращения плоскостью устраняются при использовании способа замены плоскостей проекций. Этот способ базируется на введении вспомогательной плоскости проекций П4, относительно которой секущая плоскость будет проецирующей.
На рис. 4.41 цилиндр Ф пересекается плоскостью Σ общего положения, заданной горизонтальным  и фронтальным
и фронтальным  следами. Определяются проекции цилиндра Ф и плоскости Σ на вспомогательную плоскость проекций П4, перпендикулярную к плоскости Σ (ось
следами. Определяются проекции цилиндра Ф и плоскости Σ на вспомогательную плоскость проекций П4, перпендикулярную к плоскости Σ (ось  перпендикулярна следу ). Проекция плоскости Σ на плоскость проекций П4 определяется с помощью точек
перпендикулярна следу ). Проекция плоскости Σ на плоскость проекций П4 определяется с помощью точек  Выбираются точки
Выбираются точки  проекции k4 фигуры сечения, и с помощью линий проекционной связи определяются горизонтальная и фронтальная проекции искомой линии k пересечения цилиндра Ф плоскостью Σ. Натуральная величина сечения определяется способом плоскопараллельного перемещения.
проекции k4 фигуры сечения, и с помощью линий проекционной связи определяются горизонтальная и фронтальная проекции искомой линии k пересечения цилиндра Ф плоскостью Σ. Натуральная величина сечения определяется способом плоскопараллельного перемещения.

 Определение плоского сечения цилиндра способом замены плоскостей проекций
Определение плоского сечения цилиндра способом замены плоскостей проекций
Пересечения тела вращения с многогранником
Линия пересечения многогранника с телом вращения в общем случае состоит из отдельных участков кривых линий, получающихся при пересечении граней многогранни—ка с поверхностью вращения.
Способ вспомогательных секущих плоскостей уровня
Линия k пересечения любого тела вращения Ω с многогранником Ψ — это одна пространственная линия или их совокупность. Отдельные звенья этих линий -это плоские кривые – линии пересечения граней многогранника Ψ с телом вращения Ω (рис. 4.42).

 Линии пересечения конуса с многогранником
Линии пересечения конуса с многогранником
Линия k пересечения тела вращения Ω с многогранником Ψ определяется, как правило, без использования способов преобразования комплексного чертежа, но с использованием вспомогательных секущих плоскостей Σ (1) , Σ (2) , … особого положения – так называемых плоскостей-посредников.
Суть способа вспомогательных секущих плоскостей-посредников
Вводится семья секущих плоскостей особого положения Σ (1) , Σ (2) , … и находятся лини их пересечения с телом вращения Ω и многогранником Ψ. Точки 1, 2, … пересечения пар построенных линий являются точками искомой линии пересечения тела вращения Ω с многогранником Ψ.
Плоскостями-посредниками могут быть:
а) семья параллельных плоскостей уровня;
б) семья проецирующих плоскостей, которые пересекаются по одной прямой;
в) комбинация семей плоскостей уровня и проецирующих плоскостей.
На рис. 4.43 конус пересекается с треугольной призмой. Вводятся вспомогательные секущие плоскости горизонтального уровня  , пересекающие конус по окружностям, а призму – по треугольнику. Точки 1 – 10 пересечения этих окружностей треугольником являются точками, принадлежащими искомой линии пересечения конуса с призмой. Линии 1 – 3, 3 – 10 (две гиперболы) являются двумя плоскими звеньями одной пространственной линии.
, пересекающие конус по окружностям, а призму – по треугольнику. Точки 1 – 10 пересечения этих окружностей треугольником являются точками, принадлежащими искомой линии пересечения конуса с призмой. Линии 1 – 3, 3 – 10 (две гиперболы) являются двумя плоскими звеньями одной пространственной линии.
На рис. 4.44 цилиндр пересекается с треугольной пирамидой. Вводятся вспомогательные секущие плоскости фронтального уровня  пересекающие цилиндр по прямоугольникам, а пирамиду – по треугольникам. Точки 1 – 6 пересечения этих прямоугольников с соответствующими треугольниками являются точками, принадлежащими искомой линии пересечения цилиндра с пирамидой. Линии 1 – 3, 3 – 6 (две дуги эллипсов) являются двумя плоскими звеньями одной пространственной линии
пересекающие цилиндр по прямоугольникам, а пирамиду – по треугольникам. Точки 1 – 6 пересечения этих прямоугольников с соответствующими треугольниками являются точками, принадлежащими искомой линии пересечения цилиндра с пирамидой. Линии 1 – 3, 3 – 6 (две дуги эллипсов) являются двумя плоскими звеньями одной пространственной линии
На рис. 4.45 тор пересекается с треугольной призмой. Вводятся вспомогательные секущие плоскости фронтального уровня  пересекающие тор по дугам окружностей, а призму – по прямоугольникам. Точки 1 – 12 пересечения этих дуг окружностей с соответствующими прямоугольниками являются точками, принадлежащими искомой линии пересечения тора с призмой. Линии 1 – 3, 3 – 10, 10 – 12 являются тремя плоскими кривыми четвертого порядка – звеньями искомой пространственной кривой .
пересекающие тор по дугам окружностей, а призму – по прямоугольникам. Точки 1 – 12 пересечения этих дуг окружностей с соответствующими прямоугольниками являются точками, принадлежащими искомой линии пересечения тора с призмой. Линии 1 – 3, 3 – 10, 10 – 12 являются тремя плоскими кривыми четвертого порядка – звеньями искомой пространственной кривой .

 Пересечение конуса с призмой
Пересечение конуса с призмой  Пересечение цилиндра с пирамидой
Пересечение цилиндра с пирамидой

 Пересечение тора с призмой
Пересечение тора с призмой
Способ вспомогательных проецирующих секущих плоскостей
На рис. 4.46 конус пересекается с треугольной призмой. Вводятся вспомогательные секущие горизонтально-проецирующие плоскости  проходящие через вершину S конуса и пересекающие конус по треугольникам, а призму – по прямоугольникам. Точки 1 – 8 пересечения этих треугольников с соответствующими прямоугольниками — это точки, принадлежащие искомой линии пересечения конуса с призмой. Линии 1 – 3, 3 – 10 (две гиперболы) являются двумя плоскими звеньями искомой пространственной кривой.
проходящие через вершину S конуса и пересекающие конус по треугольникам, а призму – по прямоугольникам. Точки 1 – 8 пересечения этих треугольников с соответствующими прямоугольниками — это точки, принадлежащие искомой линии пересечения конуса с призмой. Линии 1 – 3, 3 – 10 (две гиперболы) являются двумя плоскими звеньями искомой пространственной кривой.
Необходимо отметить, что секущие плоскости -посредники выбираются так, чтобы они пересекали тело вращения по прямой линии или по окружности (табл. 4.1, рис. 4.13). В любом случае эти секущие плоскости пересекут многогранник по плоскому многоугольнику, который строится способами, описанными в п. 4.1.1 (рис. 4.4 – 4.5).

 Способ вспомогательных проецирующих секущих плоскостей
Способ вспомогательных проецирующих секущих плоскостей
Пересечение двух тел вращения
Если тела вращения имеют одну общую ось, то линия их взаимного пересечения будет представлять собой окружность — общую параллель для двух тел вращения, которая на ортогональных проекциях будет изображаться на одной проекции как окружность, а на других — как прямая линия
Способ плоскостей — посредников особого положения
Два тела вращения Ф, Ψ могут пересекаться по пространственной кривой k, которая может раскладываться на несколько отдельных линий. Существует ограниченное количество способов определения этой линии:
а) плоскостей-посредников особого положения;
б) плоскостей-посредников общего положения (см. п. 4.2.5.2);
в) конических поверхностей (см. п. 4.2.5.3);
г) сфер:
1) концентрических (см. п. 4.2.5.4.2);
2) эксцентрических (см. п. 4.2.5.4.3).
Правильно выбранный способ — это залог успешного решения поставленной задачи на определение линии k пересечения двух тел вращения Ф, Ψ. Выбор определённого способа зависит от вида тел вращения Ф, Ψ и взаимного расположения их осей 
Способ вспомогательных плоскостей-посредников особого положения используется в случаях, когда два тела вращения Ф, Ψ имеют оси  , параллельные (рис. 4.47) или пересекающиеся под прямым углом (рис. 4.48). Кроме того, эти оси
, параллельные (рис. 4.47) или пересекающиеся под прямым углом (рис. 4.48). Кроме того, эти оси  должны быть прямыми особого положения. Для скрещивающихся осей
должны быть прямыми особого положения. Для скрещивающихся осей  особого положения способ вспомогательных плоскостей-посредников подходит в случае , если угол между проекциями этих осей на плоскость, им параллельную, прямой (рис. 4.49 – 4.50)
особого положения способ вспомогательных плоскостей-посредников подходит в случае , если угол между проекциями этих осей на плоскость, им параллельную, прямой (рис. 4.49 – 4.50)
Описанные условия являются необходимыми, но недостаточными. Например, способ вспомогательных плоскостей-посредников не применяется для определения линии пересечения двух конусов (рис. 4.51 а), оси которых пересекаются даже под прямым углом. В таких случаях используются способы вспомогательных секущих плоскостей общего положения и способы вспомогательных сфер.
На рис. 4.47 пересекаются два конуса Ф, Ψ с параллельными осями  которые являются горизонтально-проецирующими прямыми. Вводятся вспомогательные плоскости -посредники
которые являются горизонтально-проецирующими прямыми. Вводятся вспомогательные плоскости -посредники  горизонтального уровня, пересекающие конусы по двум семьям концентрических окружностей. Точки 1 – 7 пересечения пар этих окружностей являются точками, принадлежащими искомой линии k пересечения конусов Ф, Ψ. Наивысшая точка 4 линии k определяется способом вращения вокруг горизонтально-проецирующей оси
горизонтального уровня, пересекающие конусы по двум семьям концентрических окружностей. Точки 1 – 7 пересечения пар этих окружностей являются точками, принадлежащими искомой линии k пересечения конусов Ф, Ψ. Наивысшая точка 4 линии k определяется способом вращения вокруг горизонтально-проецирующей оси  оба конуса вращаются до положения, которое отвечает фронтальному уровню плоскости, образованной осями
оба конуса вращаются до положения, которое отвечает фронтальному уровню плоскости, образованной осями  Образующие линии двух конусов пересекаются в точке
Образующие линии двух конусов пересекаются в точке  по проекциям которой определяются фронтальная и горизонтальная проекции точки 4. Обязательно обозначаются особые точки А, В, первая из которых является точкой перехода от видимой части кривой k до невидимой на П2.
по проекциям которой определяются фронтальная и горизонтальная проекции точки 4. Обязательно обозначаются особые точки А, В, первая из которых является точкой перехода от видимой части кривой k до невидимой на П2.

 Пересечение двух конусов
Пересечение двух конусов
На рис. 4.48 конус Ф пересекается с полуцилиндром Ψ. Их оси  пересекаются в точке О и взаимно перпендикулярны. Вводятся вспомогательные плоскости-посредники
пересекаются в точке О и взаимно перпендикулярны. Вводятся вспомогательные плоскости-посредники  горизонтального уровня, пересекающие конус по концентрическим окружностям, а полуцилиндр – по прямоугольникам. Горизонтальные проекции прямоугольников определяются с помощью профильной проекции полуцилиндра. Точки
горизонтального уровня, пересекающие конус по концентрическим окружностям, а полуцилиндр – по прямоугольникам. Горизонтальные проекции прямоугольников определяются с помощью профильной проекции полуцилиндра. Точки  пересечения окружностей с соответствующими прямоугольниками является точками, которые принадлежат искомым линиям
пересечения окружностей с соответствующими прямоугольниками является точками, которые принадлежат искомым линиям  пересечения конуса Ф с цилиндром Ψ.
пересечения конуса Ф с цилиндром Ψ.
На рис. 4.49 конус Ф пересекается с полуцилиндром Ψ. Их оси скрещивающиеся и взаимно перпендикулярны. Вводятся вспомогательные плоскости-посредники  горизонтального уровня, пересекающие конус по концентрическим окружностям а полуцилиндр – по прямоугольникам. Горизонтальные проекции прямоугольников определяются с помощью профильной проекции полуцилиндра. Точки 1 – 16 пересечения окружностей с соответствующими прямоугольниками являются точками, принадлежащими искомой линии k пересечения конуса Ф с цилиндром Ψ. Особыми точками кривой k являются точки 6, 10 (точки перехода от видимой части линии k к невидимой)и точки 5, 11. Точка 16 отделена и принадлежит дуге окружности 1 – 16 – 15.
горизонтального уровня, пересекающие конус по концентрическим окружностям а полуцилиндр – по прямоугольникам. Горизонтальные проекции прямоугольников определяются с помощью профильной проекции полуцилиндра. Точки 1 – 16 пересечения окружностей с соответствующими прямоугольниками являются точками, принадлежащими искомой линии k пересечения конуса Ф с цилиндром Ψ. Особыми точками кривой k являются точки 6, 10 (точки перехода от видимой части линии k к невидимой)и точки 5, 11. Точка 16 отделена и принадлежит дуге окружности 1 – 16 – 15.

 – Определение линий пересечения тел вращения способом плоскостей-посредников особого положения
– Определение линий пересечения тел вращения способом плоскостей-посредников особого положения
На рис. 4.50 цилиндр Ф пересекается с тором Ψ. Их оси  скрещивающиеся и взаимно перпендикулярны. Вводятся вспомогательные плоскости-посредники
скрещивающиеся и взаимно перпендикулярны. Вводятся вспомогательные плоскости-посредники  фронтального уровня, пересекающие тор по дугам концентрических окружностей, а цилиндр – по прямоугольникам. Точки 1 – 8 пересечения этих дуг окружностей с соответствующими прямоугольниками — точки, принадлежащие искомой линии k пересечения цилиндра Ф с тором Ψ. Особыми точками кривой k являются точки 4, 5, первая из которых — точка перехода от видимой части линии k к невидимой на П2.
фронтального уровня, пересекающие тор по дугам концентрических окружностей, а цилиндр – по прямоугольникам. Точки 1 – 8 пересечения этих дуг окружностей с соответствующими прямоугольниками — точки, принадлежащие искомой линии k пересечения цилиндра Ф с тором Ψ. Особыми точками кривой k являются точки 4, 5, первая из которых — точка перехода от видимой части линии k к невидимой на П2.
Существуют случаи, когда способами вспомогательных секущих плоскостей невозможно определить линию пересечения двух тел вращения (рис. 4.51 б). В этом случае, как правило, используется метод последовательных приближений.

 Определение линии пересечения конуса с полуцилиндром
Определение линии пересечения конуса с полуцилиндром

 Определение линии пересечения тора с цилиндром
Определение линии пересечения тора с цилиндром

 – Случаи невозможности определения линий пересечения тел вращения способами вспомогательных секущих плоскостей особого положения
– Случаи невозможности определения линий пересечения тел вращения способами вспомогательных секущих плоскостей особого положения
Способ плоскостей-посредников общего положения
Способ вспомогательных плоскостей-посредников общего положения применяется случаях, когда два тела вращения Ф, Ψ являются прямыми или эллиптическими конусами (иногда – цилиндрами или конусом и цилиндром). Этот способ применяется для любого взаимного расположения осей тел
Суть способа вспомогательных плоскостей-посредников общего положения.
Вводится семья секущих плоскостей  … общего положения, пересекающих тела Ф, Ψ по треугольникам (в случае конусов) или прямоугольниках (в случае цилиндров). Секущие плоскости-посредники
… общего положения, пересекающих тела Ф, Ψ по треугольникам (в случае конусов) или прямоугольниках (в случае цилиндров). Секущие плоскости-посредники  … должны проходить через вершины конусов (в случае конусов) или параллельно осям цилиндров (в случае цилиндров). Точки 1, 2, … пересечения полученных треугольников или прямоугольников являются точками искомой линии k пересечения тел Ф, Ψ.
… должны проходить через вершины конусов (в случае конусов) или параллельно осям цилиндров (в случае цилиндров). Точки 1, 2, … пересечения полученных треугольников или прямоугольников являются точками искомой линии k пересечения тел Ф, Ψ.
На рис. 4.52 пересекаются два конуса. Вводится семья плоскостей  общего положения, заданных фронталью f, проходящей через вершины
общего положения, заданных фронталью f, проходящей через вершины  конусов, и горизонталями
конусов, и горизонталями  совпадающими с горизонтальными следами плоскостей-посредников . Плоскости-посредники Σ (1) – Σ (5) пересекают конусы по треугольникам, попарно пересекающимся в точках 1 – 17, которые принадлежат двум искомым линиям 1 – 7, 8 – 17 пересечения конусов.
совпадающими с горизонтальными следами плоскостей-посредников . Плоскости-посредники Σ (1) – Σ (5) пересекают конусы по треугольникам, попарно пересекающимся в точках 1 – 17, которые принадлежат двум искомым линиям 1 – 7, 8 – 17 пересечения конусов.
На рис. 4.53 пересекаются конус и цилиндр. Вводится семья плоскостей общего положения, заданных фронталью f, проходящей через вершину S конуса параллельно оси цилиндра, и горизонталями совпадающими с горизонтальными следами плоскостей-посредников . Плоскости-посредники пересекают конус по треугольникам, а цилиндр – по прямоугольникам. Эти треугольники и прямоугольники попарно пересекаются в точках 1 – 15, которые принадлежат двум искомым линиям 1 – 8, 9 – 15 пересечения конуса с цилиндром.

 Определение линий пересечения двух конусов
Определение линий пересечения двух конусов

 Определение линий пересечения конуса с цилиндром
Определение линий пересечения конуса с цилиндром
На рис. 4.54 пересекаются два цилиндра. Вводится семья плоскостей  общего положения, параллельных осям двух цилиндров. Для построения плоскостей-посредников в пространстве произвольно выбирается точка А, и строится плоскость Σ, заданная прямыми l, m, параллельными осям цилиндров. По горизонтальным следам
общего положения, параллельных осям двух цилиндров. Для построения плоскостей-посредников в пространстве произвольно выбирается точка А, и строится плоскость Σ, заданная прямыми l, m, параллельными осям цилиндров. По горизонтальным следам  плоскостей Σ строится горизонтальный след
плоскостей Σ строится горизонтальный след  плоскости Σ. Плоскости-посредники
плоскости Σ. Плоскости-посредники  имеют горизонтальные следы, параллельные
имеют горизонтальные следы, параллельные  , поэтому пересекают оба цилиндра по прямоугольникам. Эти прямоугольники попарно пересекаются в точках 1 – 18, принадлежащих искомой линии пересечения цилиндров.
, поэтому пересекают оба цилиндра по прямоугольникам. Эти прямоугольники попарно пересекаются в точках 1 – 18, принадлежащих искомой линии пересечения цилиндров.

 Определение линии пересечения двух цилиндров
Определение линии пересечения двух цилиндров
Способ конических поверхностей
Способ конических поверхностей применяется для определения линии k пересечения конуса Ф (не обязательно прямого кругового) с произвольным телом вращения Ψ. Этот способ базируется на том, что две конические поверхности с общей вершиной пересекаются по прямым линиям (рис. 4.55).

 Способ конических поверхностей
Способ конических поверхностей
Суть способа конических поверхностей
Тело вращения Ψ пересекается семьёй плоскостей  , … горизонтального уровня по окружностям
, … горизонтального уровня по окружностям  …, которые выбираются направляющими конических поверхностей
…, которые выбираются направляющими конических поверхностей  … Вершиной конических поверхностей
… Вершиной конических поверхностей  … является вершина заданного конуса Ф. Определяются следы
… является вершина заданного конуса Ф. Определяются следы  …конических поверхностей – окружности с центрами в точках
…конических поверхностей – окружности с центрами в точках  …, которые являются горизонтальными следами осей
…, которые являются горизонтальными следами осей  … конических поверхностей, … По точкам
… конических поверхностей, … По точкам  … пересечения окружностей
… пересечения окружностей  … с основой конуса Ф строятся образующие линии
… с основой конуса Ф строятся образующие линии  … Точки пересечения этих образующих с окружностями … — это точки 1, 2, … искомой линии k пересечения конуса Ф с телом вращения Ψ.
… Точки пересечения этих образующих с окружностями … — это точки 1, 2, … искомой линии k пересечения конуса Ф с телом вращения Ψ.
На рис. 4.56 конус Ф с эллиптической основой пересекается со сферой Ψ. Строится семья плоскостей  горизонтального уровня. Последние пересекают сферу Ψ по горизонтальным окружностям
горизонтального уровня. Последние пересекают сферу Ψ по горизонтальным окружностям  которые выбирают направляющими конических поверхностей
которые выбирают направляющими конических поверхностей  с вершиной S. Определяются следы
с вершиной S. Определяются следы  конических поверхностей – окружности с центрами в точках
конических поверхностей – окружности с центрами в точках  ,которые являются горизонтальными следами осей
,которые являются горизонтальными следами осей  конических поверхностей
конических поверхностей  По точкам
По точкам  пересечения окружностей
пересечения окружностей  с основой конуса Ф строятся образующие линии
с основой конуса Ф строятся образующие линии  Точки 2 – 4, 6 – 8 пересечения этих образующих с окружностями
Точки 2 – 4, 6 – 8 пересечения этих образующих с окружностями  принадлежат искомой линии k пересечения конуса Ф со сферой Ψ. Линия k строится по точкам 1 – 8. Точки 1, 5 определяются способом вспомогательной секущей плоскости-посредника
принадлежат искомой линии k пересечения конуса Ф со сферой Ψ. Линия k строится по точкам 1 – 8. Точки 1, 5 определяются способом вспомогательной секущей плоскости-посредника  фронтального уровня.
фронтального уровня.

 Определение линии пересечения эллиптического конуса со сферой способом конических поверхностей
Определение линии пересечения эллиптического конуса со сферой способом конических поверхностей
Способы вспомогательных сфер
Алгебраический порядок линии k пересечения двух поверхностей Ф, Ψ равен произведению алгебраических порядков этих поверхностей. При определённых условиях линия k распадается на несколько линий . Например, линия пересечения двух прямых круговых цилиндров (поверхностей второго порядка), цилиндра с конусом или двух конусов имеет четвертый алгебраический порядок. В некоторых случаях линия пересечения этих поверхностей распадается на две окружности (рис. 4.57 – 4.59).
Теорема Монжа
Если две поверхности Ф, Ψ второго порядка описаны вокруг третьей поверхности Ω второго порядка (или в неё вписаны), то линия их пересечения распадается на две кривые  второго порядка, плоскости которых проходят через прямую l, соединяющую точки А, В касания линий
второго порядка, плоскости которых проходят через прямую l, соединяющую точки А, В касания линий  .
.
. На рис. 4.57 – 4.59 два цилиндра, цилиндр и конус и два конуса Ф, Ψ описаны вокруг сферы Ω. Линии их пересечения распадаются на пары эллипсов  , плоскости которых проходят через общий отрезок АВ.
, плоскости которых проходят через общий отрезок АВ.

 Применение теоремы Монжа для определения линии пересечения двух цилиндров
Применение теоремы Монжа для определения линии пересечения двух цилиндров

 Применение теоремы Монжа для определения линии пересечения цилиндра с конусом
Применение теоремы Монжа для определения линии пересечения цилиндра с конусом
Существует также теорема Монжа на плоскости, сформулированная Ж. Д’Аламбером. Согласно этой теореме для трёх произвольных окружностей a, b, c, каждая из которых не находится целиком в середине двух других, точки А, В, С пересечения трёх пар общих внешних касательных принадлежат одной прямой l:


 Применение теоремы Монжа для определения линии пересечения двух конусов
Применение теоремы Монжа для определения линии пересечения двух конусов
Способ вспомогательных концентрических сфер
Способ вспомогательных концентрических сфер (сфер с постоянным центром) используется для определения линии пересечения двух тел вращения Ф, Ψ, оси  которых пересекаются. Этот способ основывается на таком свойстве тел вращения: два тела вращения Ф, Ω с общей осью і пересекаются по окружностям с центром на оси вращения (рис. 4.60 а). В способе сфер тело Ω является сферой (рис. 4.60 б).
которых пересекаются. Этот способ основывается на таком свойстве тел вращения: два тела вращения Ф, Ω с общей осью і пересекаются по окружностям с центром на оси вращения (рис. 4.60 а). В способе сфер тело Ω является сферой (рис. 4.60 б).
Суть способа концентрических сфер
Вводится множество  , … концентрических сферических поверхностей с центром в точке О пересечения осей
, … концентрических сферических поверхностей с центром в точке О пересечения осей  двух тел вращения Ф, Ψ. Сферы
двух тел вращения Ф, Ψ. Сферы  , … пересекают тела вращения Ф, Ψ по окружностям (рис. 4.60 б). Точки 1, 2, …пересечения этих окружностей являются точками искомой линии k пересечения тел вращения Ф, Ψ.
, … пересекают тела вращения Ф, Ψ по окружностям (рис. 4.60 б). Точки 1, 2, …пересечения этих окружностей являются точками искомой линии k пересечения тел вращения Ф, Ψ.
На рис. 4.61 пересекаются цилиндр Ф с конусом Ψ. Их оси пересекаются в точке О, которая выбирается центром концентрических сфер. Вводится семья концентрических сфер  с радиусами в диапазоне от
с радиусами в диапазоне от  до
до  . Сфера наименьшего радиуса вписана в конус Ψ. Сфера наибольшего радиуса проходит через точку 5, наиболее удалённую от центра О. Сферы пересекают цилиндр по окружностям, которые имеют одинаковый радиус и принадлежат плоскостям профильного уровня. Сферы пересекают конус по окружностям, принадлежащим плоскостям горизонтального уровня. Точки 1 – 8, 9 – 16 пересечения окружностей на поверхности цилиндра с соответствующими окружностями на поверхности конуса принадлежат искомой линии пересечения цилиндра Ф с конусом Ψ. Эта линия распадается на две замкнутые пространственные кривые: k – построена по точкам 1 – 8,
. Сфера наименьшего радиуса вписана в конус Ψ. Сфера наибольшего радиуса проходит через точку 5, наиболее удалённую от центра О. Сферы пересекают цилиндр по окружностям, которые имеют одинаковый радиус и принадлежат плоскостям профильного уровня. Сферы пересекают конус по окружностям, принадлежащим плоскостям горизонтального уровня. Точки 1 – 8, 9 – 16 пересечения окружностей на поверхности цилиндра с соответствующими окружностями на поверхности конуса принадлежат искомой линии пересечения цилиндра Ф с конусом Ψ. Эта линия распадается на две замкнутые пространственные кривые: k – построена по точкам 1 – 8,  – построена по точкам 9 – 16. Горизонтальные проекции линий
– построена по точкам 9 – 16. Горизонтальные проекции линий  определяются с помощью линий проекционной связи и направляющих линий (окружностей) конуса Ψ.
определяются с помощью линий проекционной связи и направляющих линий (окружностей) конуса Ψ.

 Пересечение тел вращения с общей осью
Пересечение тел вращения с общей осью

 Определение линии пересечения конуса с цилиндром
Определение линии пересечения конуса с цилиндром
На рис. 4.62 пересекаются конус Ф и сфера Ψ. Поскольку в сфере Ψ можно провести бесконечное число осей вращения  , то существует бесконечное число точек пересечения оси
, то существует бесконечное число точек пересечения оси  сферы Ψ с осью і конуса Ф. В данном случае центром концентрических сфер выбрана вершина О конуса. Вводится семья концентрических сфер
сферы Ψ с осью і конуса Ф. В данном случае центром концентрических сфер выбрана вершина О конуса. Вводится семья концентрических сфер  с радиусами в диапазоне от
с радиусами в диапазоне от  отвечающих наивысшей точке 1 и наинизшей точке 6 линии пересечения. Сферы
отвечающих наивысшей точке 1 и наинизшей точке 6 линии пересечения. Сферы  пересекают конус Ф по окружностям, принадлежащим плоскостям горизонтального уровня. Сферы
пересекают конус Ф по окружностям, принадлежащим плоскостям горизонтального уровня. Сферы  пересекают сферу Ψ по окружностям, принадлежащим фронтально-проецирующим плоскостям. Точки 1 – 10 пересечения окружностей на поверхности конуса Ф с соответствующими окружностями на поверхности сферы Ψ принадлежат искомой линии k пересечения цилиндра Ф с конусом Ψ. Горизонтальная проекция линии k определяется с помощью линий проекционной связи и направляющих линий (окружностей) конуса Ψ.
пересекают сферу Ψ по окружностям, принадлежащим фронтально-проецирующим плоскостям. Точки 1 – 10 пересечения окружностей на поверхности конуса Ф с соответствующими окружностями на поверхности сферы Ψ принадлежат искомой линии k пересечения цилиндра Ф с конусом Ψ. Горизонтальная проекция линии k определяется с помощью линий проекционной связи и направляющих линий (окружностей) конуса Ψ.

 Определение линии пересечения конуса способом вспомогательных концентрических сфер
Определение линии пересечения конуса способом вспомогательных концентрических сфер
Способ вспомогательных эксцентрических сфер
Способ вспомогательных эксцентрических сфер (сфер с разными центрами) применяется для определения линии k пересечения двух тел вращения Ф, Ψ, оси  которых пересекаются или скрещивающиеся. Кроме того, тела вращения Ф, Ψ должны иметь по крайней мере одну общую плоскость симметрии. Отличие этого способа от способа концентрических сфер состоит в изменении центров сферических поверхностей.
которых пересекаются или скрещивающиеся. Кроме того, тела вращения Ф, Ψ должны иметь по крайней мере одну общую плоскость симметрии. Отличие этого способа от способа концентрических сфер состоит в изменении центров сферических поверхностей.
Суть способа эксцентрических сфер
Вводится множество  … сферических поверхностей с центрами
… сферических поверхностей с центрами  , … Сферы
, … Сферы  , … пересекают тела вращения Ф, Ψ по окружностям (рис. 4.60 б). Точки 1, 2, … пересечения этих окружностей — точки искомой линии k пересечения тел вращения Ф, Ψ. Сложность способа эксцентрических сфер состоит в правильном определении их центров …, способ определения которых зависит от формы тел вращения Ф, Ψ.
, … пересекают тела вращения Ф, Ψ по окружностям (рис. 4.60 б). Точки 1, 2, … пересечения этих окружностей — точки искомой линии k пересечения тел вращения Ф, Ψ. Сложность способа эксцентрических сфер состоит в правильном определении их центров …, способ определения которых зависит от формы тел вращения Ф, Ψ.
Правило определения центров эксцентрических сфер Центры ….эксцентрических сфер … находятся в общей плоскости симметрии тел вращения Ф, Ψ. Построенные сферы … должны пересекать тела вращения Ф, Ψ по окружностям.
Основным преимуществом способов вспомогательных сфер (концентрических или эксцентрических) над другими существующими способами определения линии k пересечения двух тел вращения Ф, Ψ является то, что линия k пересечения определяется только с помощью одной проекции, например, фронтальной.
На рис. 4.63 а конус Ф пересекается со сферой Ψ. Центрами  эксцентрических сфер
эксцентрических сфер  являются произвольные точки оси конуса Ф. Радиусы эксцентрических сфер выбираются произвольно . Сферы
являются произвольные точки оси конуса Ф. Радиусы эксцентрических сфер выбираются произвольно . Сферы  ) пересекают конус Ф по окружностям, принадлежащим плоскостям горизонтального уровня. Сферы
) пересекают конус Ф по окружностям, принадлежащим плоскостям горизонтального уровня. Сферы  пересекают сферу Ψ по окружностям, принадлежащим фронтально-проецирующим плоскостям. Точки 1 – 6 пересечения окружностей на поверхности конуса Ф с соответствующими окружностями на поверхности сферы Ψ принадлежат искомой линии k пересечения цилиндра Ф с конусом Ψ.
пересекают сферу Ψ по окружностям, принадлежащим фронтально-проецирующим плоскостям. Точки 1 – 6 пересечения окружностей на поверхности конуса Ф с соответствующими окружностями на поверхности сферы Ψ принадлежат искомой линии k пересечения цилиндра Ф с конусом Ψ.

 Способ эксцентрических сфер с произвольными центрами и радиусами
Способ эксцентрических сфер с произвольными центрами и радиусами
На рис. 4.63 б цилиндр Ф пересекается с полусферой Ψ вдвое большего радиуса. Центрами  эксцентрических сфер являются произвольные точки оси цилиндра Ф. Радиусы эксцентрических сфер выбираются произвольно. Сферы пересекают цилиндр Ф по окружностям одинаковых радиусов, принадлежащих фронтально-проецирующим плоскостям. Сферы пересекают полусферу Ψ по окружностям разных радиусов, принадлежащих фронтально-проецирующим плоскостям. Точки 1 – 8 пересечения окружностей на поверхности цилиндра Ф с соответствующими окружностями на поверхности полусферы Ψ принадлежат искомой линии k пересечения цилиндра Ф с полусферой Ψ. Эта линия называется кривой Вивиани.
эксцентрических сфер являются произвольные точки оси цилиндра Ф. Радиусы эксцентрических сфер выбираются произвольно. Сферы пересекают цилиндр Ф по окружностям одинаковых радиусов, принадлежащих фронтально-проецирующим плоскостям. Сферы пересекают полусферу Ψ по окружностям разных радиусов, принадлежащих фронтально-проецирующим плоскостям. Точки 1 – 8 пересечения окружностей на поверхности цилиндра Ф с соответствующими окружностями на поверхности полусферы Ψ принадлежат искомой линии k пересечения цилиндра Ф с полусферой Ψ. Эта линия называется кривой Вивиани.
На рис. 4.64 тор Ф пересекается с цилиндром Ψ. Вводится семья фронтально-проецирующих секущих плоскостей  , проходящих через фронтально-проецирующую ось j тора и пересекают линию центров образующих линий тора Ф в точках
, проходящих через фронтально-проецирующую ось j тора и пересекают линию центров образующих линий тора Ф в точках  . Из этих точек проводятся перпендикуляры к плоскостям
. Из этих точек проводятся перпендикуляры к плоскостям  до пересечения с горизонтально проецирующей осью і цилиндра. Полученные точки
до пересечения с горизонтально проецирующей осью і цилиндра. Полученные точки  являются центрами эксцентрических сфер . Строится семья сфер с такими радиусами, чтобы эти сферы пересекали тор по окружностям, принадлежащим фронтально-проецирующим плоскостям Σ (1) – Σ (4) . Сферы Ω (1) – Ω (4) пересекают цилиндр по окружностям одинаковых радиусов, принадлежащих плоскостям горизонтального уровня. Точки 1 – 4 пересечения окружности на поверхности тора Ф с соответствующими окружностями на поверхности цилиндра Ψ принадлежат искомой линии 1 – 5 пересечения тора Ф с цилиндром Ψ. Точка 5 -точка пересечения (касания) основ тора и цилиндра (см. горизонтальную проекцию).
являются центрами эксцентрических сфер . Строится семья сфер с такими радиусами, чтобы эти сферы пересекали тор по окружностям, принадлежащим фронтально-проецирующим плоскостям Σ (1) – Σ (4) . Сферы Ω (1) – Ω (4) пересекают цилиндр по окружностям одинаковых радиусов, принадлежащих плоскостям горизонтального уровня. Точки 1 – 4 пересечения окружности на поверхности тора Ф с соответствующими окружностями на поверхности цилиндра Ψ принадлежат искомой линии 1 – 5 пересечения тора Ф с цилиндром Ψ. Точка 5 -точка пересечения (касания) основ тора и цилиндра (см. горизонтальную проекцию).

 Способ эксцентрических сфер с определёнными центрами и радиусами
Способ эксцентрических сфер с определёнными центрами и радиусами

Винченцо Вивиани (Vincenzo Viviani) – итальянский математик и архитектор, ученик Галилея и Торичелли, член Лондонского королевского общества. Автор трактатов по теоретической механики и сопротивления материалов. Применил биквадратные пространственные кривые для строительства окон в сферических куполах.
Свойства линий пересечения тел вращения
В случае пересечения двух тел вращения второго порядка Ф, Ψ с общей плоскостью симметрии Σ линия k пересечения — это биквадратная пространственная кривая, которая является отдельным случаем кривой четвертого порядка (рис. 4.65 а – б).
Свойства биквадратных пространственных кривых:
а) биквадратная пространственная кривая k имеет плоскость симметрии Σ, которая совпадает с общей плоскостью симметрии двух тел вращения, которые пересекаются.
б) проекция биквадратной пространственной кривой k на собственную плоскость симметрии Σ является плоской кривой второго порядка (табл. 4.2).

 Биквадратные пространственные кривые
Биквадратные пространственные кривые

Например, линия k пересечения двух цилиндров Ф, Ψ разных диаметров (рис. 4.65 а) является биквадратной пространственной кривой k, проецирующейся на плоскость  в гиперболу.
в гиперболу.
На рис. 4.65 б показана линия k пересечения цилиндра Ф со сферой Ψ. Эта линия является биквадратной пространственной кривой, которая проецируется на плоскость  в параболу.
в параболу.
Примеры и образцы решения задач:
- Решение задач по инженерной графике
- Решение задач по начертательной геометрии
Услуги по выполнению чертежей:
- Заказать чертежи
- Помощь с чертежами
- Заказать чертеж в компасе
- Заказать чертеж в автокаде
- Заказать чертежи по инженерной графике
- Заказать чертежи по начертательной геометрии
- Заказать черчение
Учебные лекции:
- Инженерная графика
- Начертательная геометрия
- Оформление чертежей
- Чертеж общего вида и сборочный чертеж
- Техническое рисование
- Машиностроительные чертежи
- Геометрические построения
- Деление окружности на равные части
- Сопряжение линий
- Коробовые кривые линии
- Построение уклона и конусности
- Лекальные кривые
- Параллельность и перпендикулярность
- Методы преобразования ортогональных проекций
- Поверхности
- Способы проецирования
- Метрические задачи
- Способы преобразования чертежа
- Кривые линии
- Кривые поверхности
- Трёхгранник Френе
- Проецирование многогранников
- Развёртывание поверхностей
- Проекционное черчение
- Проецирование
- Проецирование точки
- Проецирование отрезка прямой линии
- Проецирование плоских фигур
- Способы преобразования проекций
- Аксонометрическое проецирование
- Проекции геометрических тел
- Сечение геометрических тел плоскостями и развертки их поверхностей
- Взаимное пересечение поверхностей тел
- Сечение полых моделей
- Разрезы
- Требования к чертежам деталей
- Допуски и посадки
- Шероховатость поверхностей и обозначение покрытий
- Разъемные и неразъемные соединения деталей
- Передачи и их элементы
9.4.1.Пересечение проецирующих тел вращения
Рассмотрим пересечение двух цилиндров (рис. 9.7), ось вращения одного из которых перпендикулярна горизонтальной плоскости проекций, а другого — профильной.
Поверхности цилиндров относятся к поверхностям второго порядка. Следовательно, линия их пересечения будет пространственной кривой четвертого порядка.
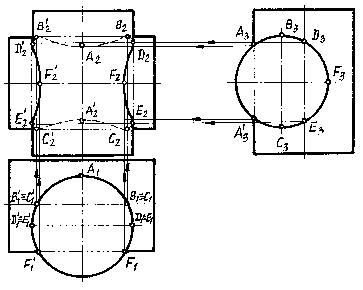
Рис. 9.7.
Вертикальный цилиндр проецируется на виде сверху в окружность. Так как линия пересечения принадлежит одновременно двум цилиндрам, то дуга F1‘D1‘B1‘A1B1D1F1 является горизонтальной проекцией линии пересечения. Горизонтальный цилиндр проецируется в окружность на виде слева. Следовательно, дуга А3В3D3F3F3С3А3‘ является профильной проекцией линии пересечения.
На рис. 9.7 построены проекции характерных точек, которые находятся на пересечении линий связи, проведенных от вида сверху и от вида слева. Для более точного проведения фронтальной проекции линии пересечения следует построить также проекции промежуточных точек.
9.4.2.Пересечение проецирующего тела вращения с непроецирующим
При построении линии перехода проецирующего и непроецирующего геометрических тел следует иметь в виду, что одна из проекций линии пересечения известна. Она будет совпадать с одной из проекций проецирующего тела.
На рис. 9.8 построена линия перехода между цилиндром и тором. Так как поверхность цилиндра перпендикулярна плоскости П1, то горизонтальная проекция линии перехода известна. Она совпадает с горизонтальной проекцией цилиндра. Фронтальную и профильную проекции строим по принадлежности точек линии перехода непроецирующей поверхности тора.
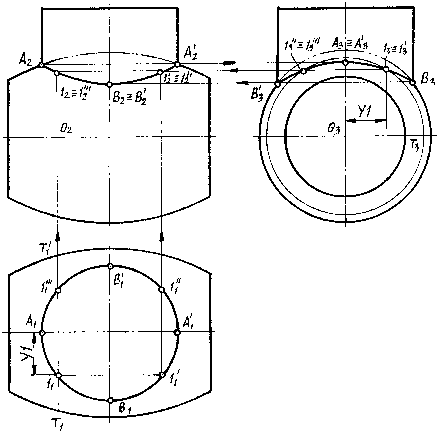
Рис. 9.8.
Проекции промежуточной точки 1 на видах спереди и слева (1г и 1з) определяются при помощи параллели торовой поверхности, проходящей через точку 1. Проекцией параллели на виде сверху является отрезок прямой Т1Т1‘. На виде слева параллель проецируется в окружность радиуса О3Т3. Профильная проекция точки 1 строится на проекции параллели с помощью координаты Y1, которая определяется на виде сверху. В свою очередь, фронтальная проекция точки 1 находится на пересечении горизонтальной и вертикальной линий связи.
Необходимо отметить, что вместе с построением проекций точки 1 на видах определяются проекции еще трех симметричных ей точек 1‘, 1» и 1»’.
Проекции характерных точек А, А‘, В, В‘ можно получить аналогичными построениями. Но точки А и А‘ находятся на пересечении главных фронтальных меридианов. Следовательно, известны и фронтальные проекции точек А и А‘. Точки В и В‘ находятся на пересечении главных профильных меридианов. Следовательно, известны профильные проекции точек В и В‘. Недостающие проекции этих точек находим по линиям связи.
9.4.3.Пересечение непроецирующих тел вращения с параллельными осями
На рис. 9.9 приведен пример построения проекций линий пересечения между сферической и конической поверхностями. Представленная геометрическая модель является прототипом широко распространенных форм в химическом машиностроении, где от сферических поверхностей крышек отводятся патрубки, к которым крепятся подводящие или отводящие рабочую среду трубопроводы.
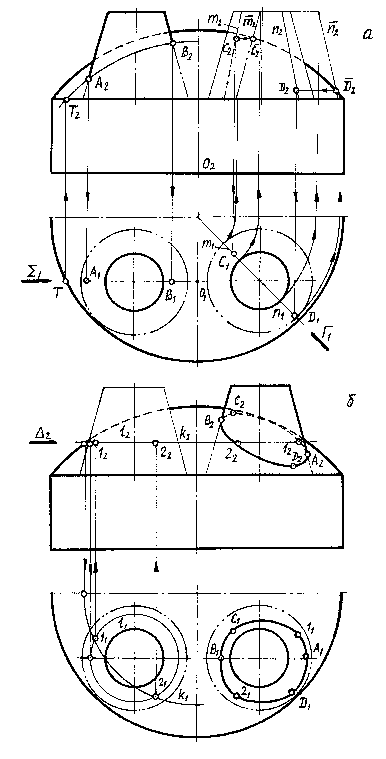
Рис. 9.9.
Анализ показывает, что на чертеже нет ни одной проекции линии пересечения. В этом случае для построения проекций линий перехода вводятся дополнительные поверхности-посредники. В основе указанного способа находится известное положение геометрии о том, что если у расположенных на поверхности линий имеются общие точки, то в этих точках линии пересекаются.
В качестве посредников необходимо выбирать такие секущие поверхности, которые будут пересекать заданные геометрические тела по графически простым линиям — прямым или окружностям.
Если оси поверхностей вращения параллельны, то в качестве посредников удобнее применять плоскости, так как, расположив плоскость перпендикулярно осям геометрических тел, получим в пересечении плоскости с поверхностями две окружности. Возможно и другое расположение секущей плоскости, дающей при пересечении с заданными поверхностями графически простые линии.
Построение характерных точек, ( рис. 9.9 -а). Для построения проекций крайних правых и левых точек линии перехода (А и В) через главный фронтальный меридиан конической поверхности проводится вспомогательная секущая плоскость уровня — фронтальная плоскостьS ( S 1).
Плоскость-посредник S пересекает поверхность сферы по окружности радиуса ОТ, а поверхность конуса — по главному фронтальному меридиану. Точки А и В пересечения полученных окружности и трапеции принадлежат и поверхности конуса и поверхности сферы. Следовательно, они принадлежат линии пересечения указанных поверхностей. Фиксируем фронтальные проекции точек А и В. Их горизонтальные проекции строим по линиям связи.
Две другие характерные точки высшая С и низшая D определяются при помощи введения горизонтально проецирующей плоскости-посредника Г (Г1). Эта плоскость проходит через центр сферы и ось конической поверхности, т.е. является общей плоскостью симметрии сферы и конуса.
Плоскость Г пересекает поверхность сферы по окружности, которая на фронтальную плоскость проецируется в эллипс, не являющийся графически простой линией. Поэтому плоскость Г вместе с полученными сечениями сферы и конуса поворачивают до положения параллельного плоскости П2. Фронтальные проекции повернутых линий сечения пересекаются в точках C2 и D2, которые являются проекциями искомых точек после вращения.
Для нахождения их исходного положения на чертеже построены проекции образующих m (m1, m2) и n (n1, n2) до вращения. Обратное вращение точек С и D осуществляется проведением отрезков C2—C2 и D2—D2 — фронтальных проекций дуг вращения. Горизонтальные проекции точек С и D получаются в пересечении вертикальных линий связи с горизонтальным следом плоскости-посредника Г.
Построение промежуточных точек ( рис. 9.9 -б). Проекции промежуточных точек 1 и 2 получены при помощи фронтально проецирующей плоскости-посредника D ( D 2). Эта плоскость рассекает коническую поверхность и сферу по окружностям — параллелям k и l. На виде сверху фиксируются точки пересечения проекций параллелей (11 и 21) — горизонтальные проекции искомых промежуточных точек. Фронтальные проекции этих точек находятся на пересечении вертикальных линий связи с фронтальным следом плоскости-посредника Г.
На последней стадии выполнения чертежа полученные проекции точек линии перехода соединяются в плавную замкнутую линию с помощью лекала.
9.4.4.Пересечение соосных поверхностей вращения
Соосными называют поверхности вращения, оси которых совпадают.
Линия пересечения таких поверхностей строится на основании теоремы о пересечении соосных поверхностей вращения: соосные поверхности вращения пересекаются между собой по окружностям.
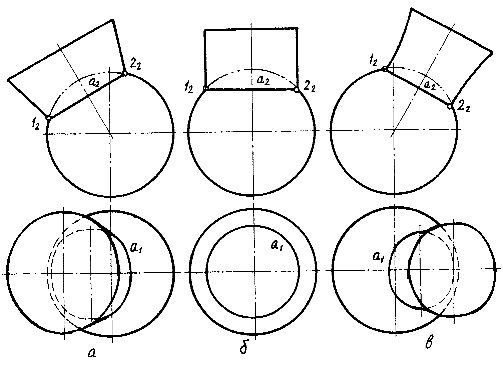
Рис. 9.10.
На рис. 9.10 приведены примеры пересечения сферы с конической, цилиндрической и торовой поверхностями. Рассматриваемые поверхности соосны с поверхностью сферы, так как центр сферы лежит на их осях вращения. Следовательно, поверхности со сферой пересекаются по окружностям.
Необходимо отметить, если оси пересекающихся соосных поверхностей параллельны плоскости проекций, то окружности пересечения (а) проецируются на эту плоскость в отрезки прямых 1222. Эти отрезки равны диаметру окружности пересечения, а их конечные точки (12) определяются пересечением очерковых линий на этом виде.
9.4.5.Пересечение непроецирующих тел вращения с пересекающимися осями
При пересечении непроецирующих тел вращения с пересекающимися осями ни один из перечисленных выше методов построения проекций линий перехода не применим. В этом случае рациональнее использовать вспомогательные секущие сферы-посредники. Следует отметить, что метод сфер-посредников применим не только для построения линии пересечения непроецирующих тел, но и для проецирующих. При этом необходимо выполнение трех условий:
— пересекающиеся поверхности должны быть поверхностями вращения;
— оси поверхностей должны пересекаться;
— плоскость, образованная осями поверхностей, должна быть параллельна одной из плоскостей проекций.
Рис. 9.11.
Обратимся теперь к модели, показанной на рис. 9.9. Пересекающиеся цилиндры А и Б рассекаются сферой по окружностям, как соосные поверхности вращения. Точки пересечения окружностей (точки С) принадлежат и цилиндру А, и цилиндру Б. Следовательно, они принадлежат линии перехода.
Пусть требуется построить фронтальную проекцию линии пересечения между поверхностями цилиндра и конуса (рис.9.12). При этом оси поверхностей пересекаются в точке О и параллельны фронтальной плоскости проекций.
Проведем сферу с центром О так, чтобы она пересекала и цилиндр, и конус. Проведенная сфера будет пересекать поверхность цилиндра по окружности а, которая спроецируется в отрезок прямой, соединяющий точки пересечения очерковых линий сферы и цилиндра. Сфера будет пересекать поверхность конуса по двум окружностям b и с, которые спроецируются в отрезки прямых, соединяющих точки пересечения очерковых линий сферы и конуса. Окружность а пересечет окружность b в точке 1, окружность с — в точке 2, которые принадлежат линии пересечения цилиндра и конуса.
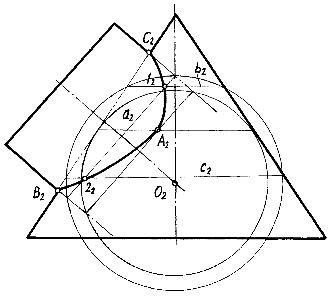
Рис. 9.12.
Для построения проекций точек линии перехода годится не любая сфера. Самая минимальная сфера должна касаться одной из поверхностей и пересекать вторую. С помощью такой сферы построена проекция характерной точки А.
Так как оси цилиндра и конуса параллельны фронтальной плоскости проекций, то точки пересечения проекций главных фронтальных меридианов (В2 и С2) также принадлежат проекции линии пересечения.
9.4.6. Пересечение непроецирующих тел вращения со скрещивающимися осями
При построении линий перехода встречаются случаи, когда из одного заранее определенного центра можно провести только одну вспомогательную сферу, определяющую точку линии перехода. Для построения последующих точек такой линии приходится искать и новые положения центров, и другие величины радиусов сфер.
Построим линию пересечения поверхностей тора-кольца и конуса вращения (рис. 9.13). Оси тора и конуса не пересекаются. Однако эти поверхности имеют общую плоскость симметрии — фронтальную плоскость уровня Q ( Q 1). Кроме того, у обеих поверхностей можно выделить семейство круговых сечений.
Характерные точки А и В находятся без дополнительных построений, как точки пересечения очерковых линий, расположенных в плоскости симметрии. Остальные точки линии пересечения могут быть построены при помощи вспомогательных эксцентрических сфер.
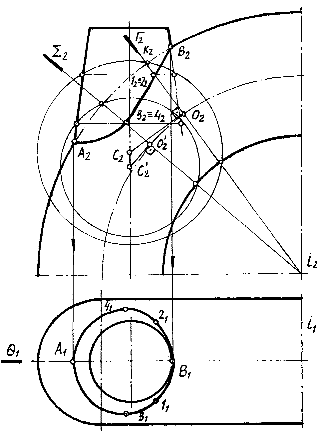
Рис. 9.13.
Способ эксцентрических сфер заключается в следующем. Через ось кольца i проводят вспомогательную фронтально проецирующую плоскость Г(Г2), которая рассекает тор по окружности диаметра KL (на чертеже показана фронтальная проекция K2L2) с центром в точке 0(О2), лежащей на средней линии тора. Из центра О2 этой окружности проведем перпендикуляр (касательная к средней линии тора) к плоскости Г до пересечения с осью конуса в точке С (С2). Если затем из этой точки, как из центра, провести вспомогательную секущую сферу, то такая сфера пересечет конус по окружности. Следовательно, сфера, проведенная из центра С с радиусом, равным СК (С2K2), пересечет тор и конус по окружностям, которые в своем пересечении определят точки искомой линии перехода. Такими точками в плоскости Г являются точки 1 (11, 12) и 2 (21, 22).
Так
как все точки тела вращения описывают
при своем движении окружности, то линия
пересечения с плоскостью тел вращения
будет окружностью. Если плоскость
пересекает тело не перпендикулярно,
то в зависимости от поверхности и
расположения плоскости получаются
различные линии. При построении линии
пересечения первоначально определяют
экстремальные (или опорные) точки (самая
левая, правая, нижняя, верхняя, ближняя,
дальняя точки,) принадлежащие линии
пересечения.
9.3.1. Пересечение цилиндра с плоскостью, не перпендикулярной его оси
На
рис. 9.20 показаны различные случаи
положения плоскости пересечения
относительно оси вращения цилиндра.
|
|
||
|
а |
б |
в |
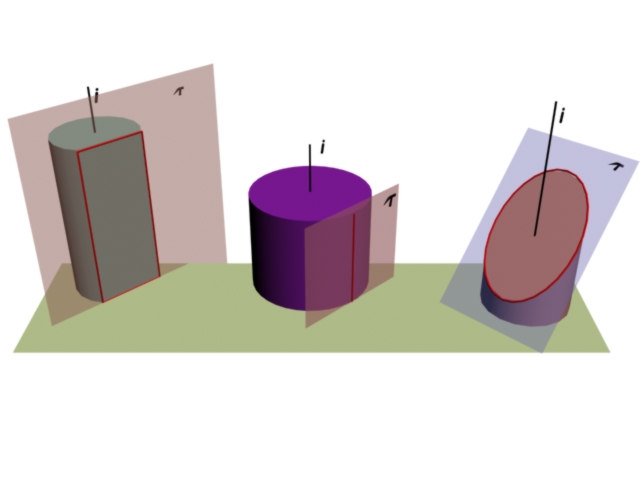
Рис.
9.20
В
случае, когда плоскость
параллельна оси цилиндра,
получим
либо две
параллельные прямые (рис. 9.20, а,
9.20, б),
либо одну прямую, совпадающую с образующей
(касательная плоскость).
На
рис. 9.21 а
показан комплексный чертеж линии
пересечения цилиндра с плоскостью
параллельной оси вращения. В данном
случае на фронтальной проекции линии
пересечения конкурируют друг с другом,
а на профильной плоскости проекций эти
линии будут видимыми. Если бы секущая
плоскость прошла правее оси цилиндра,
то тогда эти линии были бы невидимыми
При
пересечении цилиндра
с плоскостью,
не параллельной и не перпендикулярной
оси, получим
эллипс, малая ось которого равна диаметру
цилиндра, а большая – d/sin
– показана на фронтальной проекции,
см. рис. 9.20, в,
9.21, б,
где эллипс принадлежит проецирующей
плоскости, а значит, его большая ось
будет проецироваться в виде отрезка
прямой линии (рис. 9.20, в,
9.21, б).
Для
случая, показанного на рис. 9.21, б,
горизонтальная проекция линии пересечения
– окружность, фронтальная – отрезок,
соответствует натуральной длине большой
оси эллипса, а малая ось – диаметр
цилиндра. На профильной плоскости
проекций линия пересечения с плоскостью
выглядит в виде эллипса с одной осью –
d,
а с другой – dctg,
где d
– диаметр цилиндра; угол
– угол наклона плоскости к оси цилиндра
(рис. 9.21, б),
большая ось – диаметр цилиндра.
Часть
эллипса, находящаяся правее оси цилиндра
будет невидима, так как направление
взгляда на профильную плоскость проекций
будет слева направо.
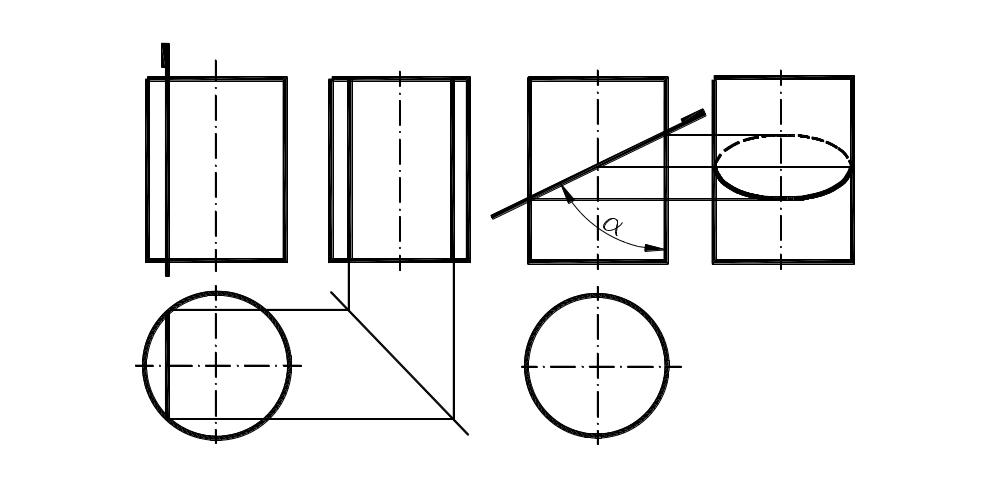
а
б
Рис.
9.21
9.3.2. Пересечение конуса плоскостью
Если
плоскость перпендикулярна оси вращения,
то линия пересечения будет окружность
с диаметром
d
= 2h
tg/2
Рис.
9.22
Пересечение
конуса с плоскостью дает несколько
вариантов линий пересечения конуса с
плоскостью, не перпендикулярной оси
вращения:
1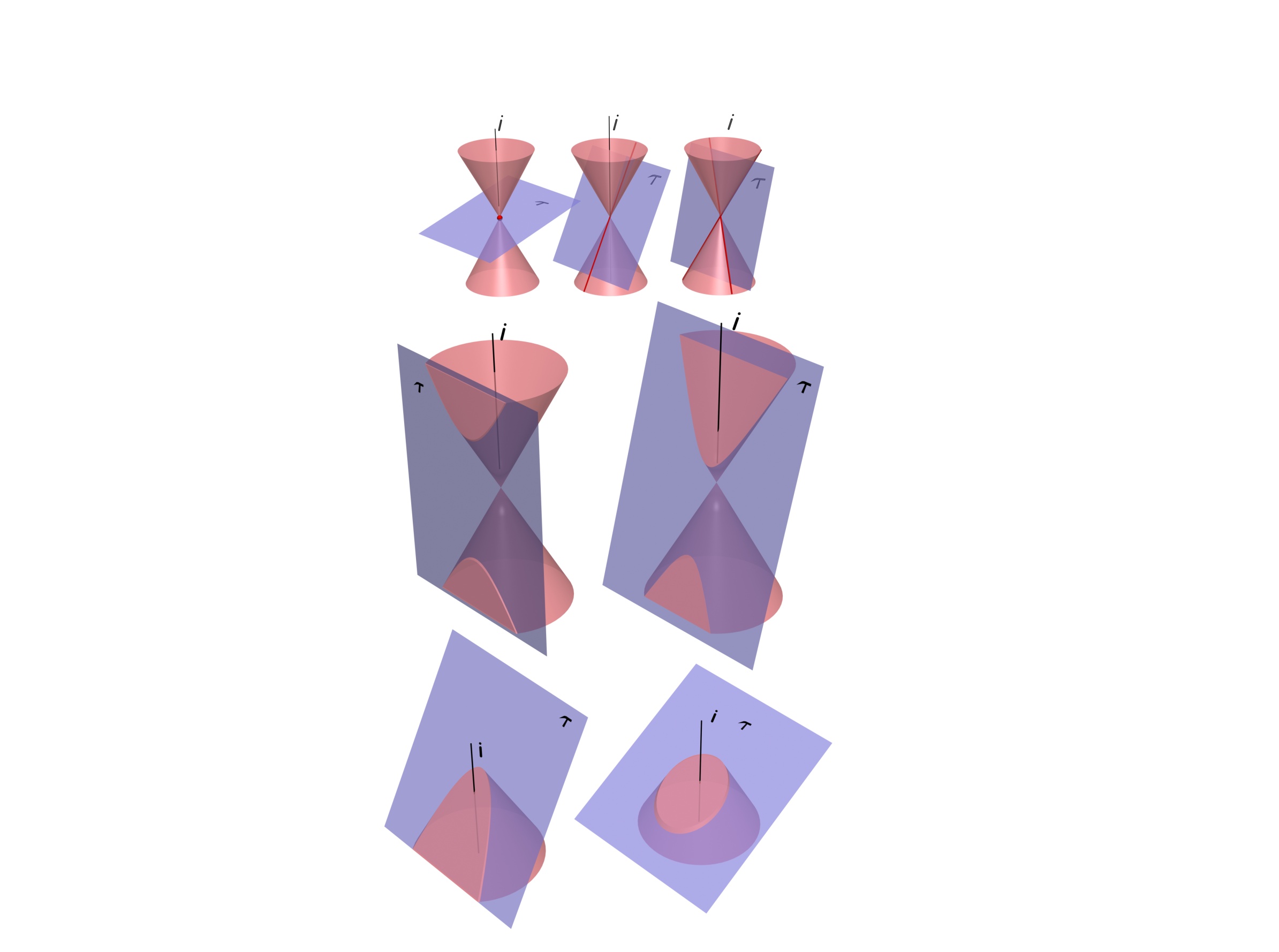
.
точка – плоскость проходит через
вершину конуса. Результатом пересечения
будет точка (рис. 9.23);
Рис.
9.23
2
.
прямая – плоскость касается поверхности
конуса; одна прямая (рис. 9.24);
Рис.
9.24
3
.
плоскость проходит через вершину
конуса, а угол наклона плоскости по
отношению к оси вращения меньше угла
наклона образующей конуса к его оси. В
этом случае будем иметь две пересекающиеся
прямые (рис. 9.25) ;
Рис.
9.25
4.
гипербола – плоскость пересекает
верхнюю и нижнюю ветви конической
поверхности (рис. 9.26, а).
второй случай – когда угол наклона
плоскости меньше угла раствора конуса
(рис. 9.26, б);
а
б
Рис.
9.26
5
.
парабола – плоскость не проходит через
вершину и параллельна образующей (рис.
9.27);
Рис.
9.27
6
.
эллипс – конус пересекает только одну
из ветвей конической поверхности (рис.
9.28).
Рис.
9.28
На
рис. 9.29 показано построение проекций
сечения для случая когда угол
между секущей плоскостью и осью
конической поверхности больше угла
наклона образующей конической поверхности
к его оси,
поэтому в сечении получим замкнутую
линию – эллипс (рис. 9.29). Определим
проекции его осей. Большая ось эллипса
на 2
проецируется в натуральную величину.
Ее проекции определяют высшей точкой
– (D2)и
низшей – (С2).
Ее горизонтальную проекцию определяем
по линиям связи, профильные проекции
– по правилу построения третьей проекции
точки по двум известным.
Малая
ось эллипса на 2
проецируется в точку, расположенную
на середине отрезка между высшей и
низшей точками. Через середину эллипса
(точки А2
В2
проводим проецирующую плоскость
перпендикулярно оси конусной поверхности.
Так как точки вращаются вокруг оси, то
их траектории – это окружности
(параллели) и линия пересечения плоскости,
перпендикулярной оси вращения любого
тела, а также окружность, которую
показываем на 1
(тонкая линия с центром, совпадающим с
проекцией оси конуса). Проводим линию
связи для точек проекций центра симметрии
эллипса О1
– О2
и О2
– О3
и определяем горизонтальную проекцию
малой оси (точки А1
и В1
– пересечение
линий связи, О1
– О2
и окружности).
Р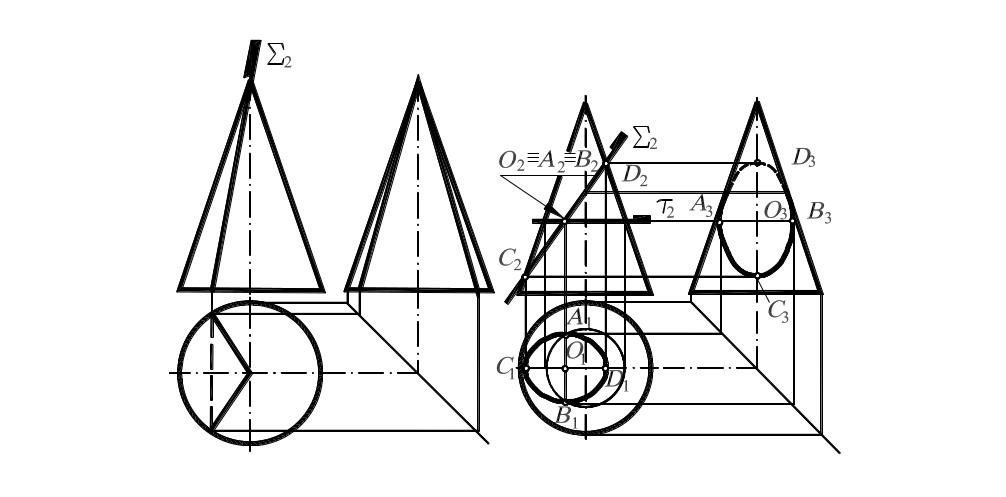
ис.
9.29
Секущая
плоскость имеет угол наклона, одинаковый
с углом наклона образующей к этой оси
(рис. 9.30). В
сечении получится парабола, вершина
которой на поверхности будет наивысшей.
Находим горизонтальную проекцию линии
пересечения плоскости Σ с основанием
конуса. Определяем проекции экстремальных
точек: по фронтальной проекции самую
верхнюю (1) и нижнюю (2 и 3), самую правую
(1) и левые (2 и 3) проекции точки.
Угол
наклона секущей плоскости к оси
конической поверхности γ
меньше угла наклона образующей конической
поверхности (рис.
9.31).
Плоскость Σ пересечет поверхность
конуса по гиперболе,
одна (нижняя) ветвь которой показана
на чертеже (рис. 9.31),
Р
ис.
9.30
Р
ис.
9.31
С
екущая
плоскость параллельна оси конуса (рис.
9.32). Плоскость S
пересечет конус по гиперболе,
аналогично предыдущему случаю верхняя
часть, не показанная на чертеже, будет
зеркальным отображением нижней.
Рис.
9.32
С
екущая
плоскость проходит через вершину конуса
– получаем прямые линии (рис. 9.33).
Рис.
9.33
Линия
пересечения поверхности вращения с
плоскостью общего вида
(рис. 9.34) определяется по точкам
пересечения параллелей поверхности
вращения с плоскостью. Сначала определяют
главные
(опорные)
точки
линии пересечения, а затем ряд
промежуточных ее точек. На рис. 9.34, а
рис. 9.34, б
– комплексный чертеж. Главными точками
линии пересечения
показано
наглядное изображение определения
точек пересечения, а на поверхности
вращения с плоскостью являются точки
пересечения плоскостью главного
меридиана, экватора, высшая и низшая
точки (рис. 9.34, а).
Для
поверхности на рис. 9.34, б
низшая точка – 1, высшая точка – 2
(показано построение линии пересечения
для ближней половины поверхности,
причем следует иметь в виду, что вторая
половина – зеркальное отображение
первой). Точка 3 принадлежит горлу, 4 –
экватору, а точка 6 – промежуточной
параллели С.
Данная параллель будет находиться на
плоскости-посреднике, проведенной
перпендикулярно оси вращения. Точка 6
определяет видимость линии пересечения
на профильной проекции, так как
принадлежит главному меридиану.
а
б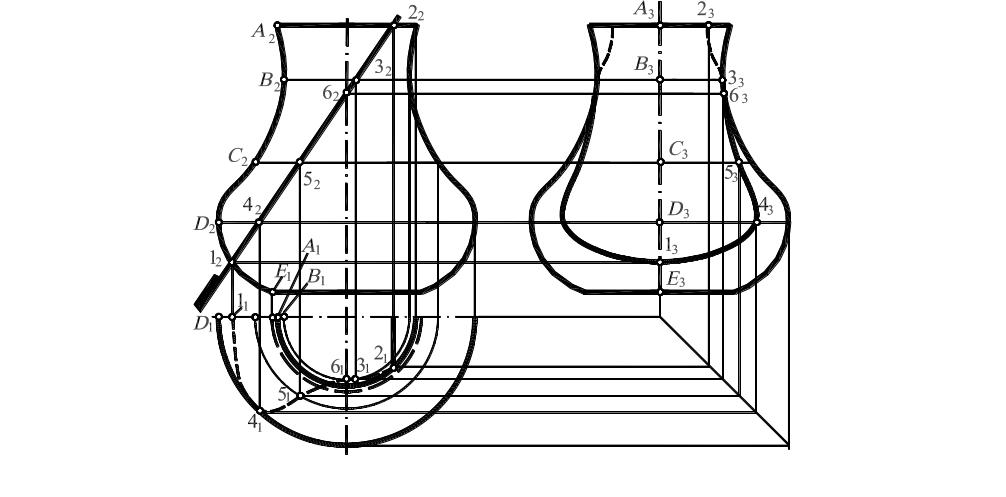
Рис.
9.34
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
По вопросам репетиторства по начертательной геометрии, вы можете связаться любым удобным способом в разделе Контакты. Возможно очное и дистанционное обучение по Skype: 1250 р./ак.ч.
В общем случае кривые поверхности второго порядка (цилиндр, конус, сфера) пересекаются по пространственной кривой четвертого порядка. Эта лекальная кривая строится по точкам.
В общем случае эти точки находятся как точки пересечения образующих одной поверхности с образующими другой, а потом точки последовательно соединяют линией с учётом видимости.
8.1. Частные случаи
Теорема Монжа 1. Две поверхности, описанные вокруг общей сферы, пересекаются по двум плоским кривым (Рисунок 8.1).
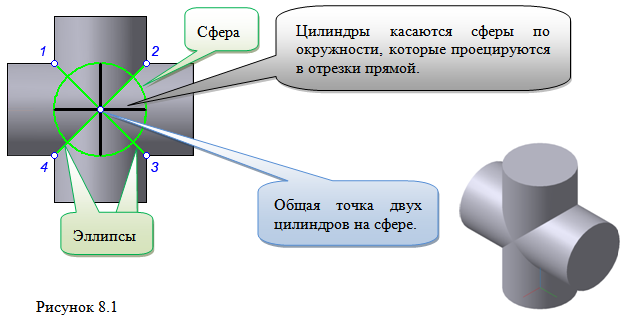
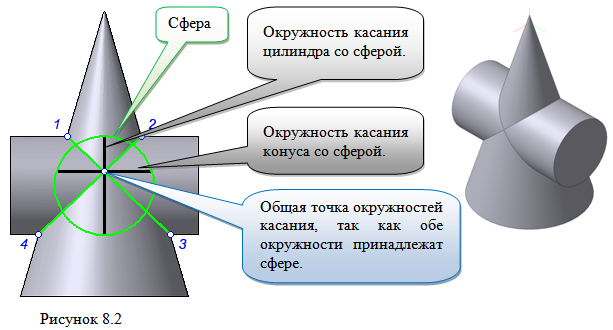
Крайние образующие цилиндров пересекаются в точках 1, 2, 3, 4.
Цилиндры пересекаются по эллипсам.
Крайние образующие пересекаются в точках 1, 2, 3, 4.
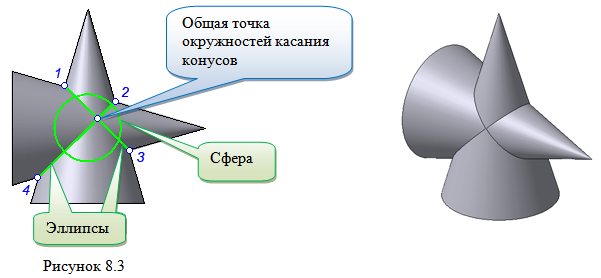
Теорема Монжа 2. Если две пересекающиеся поверхности второго порядка имеют общую плоскость симметрии, параллельную некоторой плоскости проекций, то на эту плоскость проекций линия их пересечения проецируется в кривую второго порядка. Если это условие не выполнено, то – в кривую четвертого порядка. Эту плоскость называют плоскостью параллелизма.
Рассмотрим четыре примера пересечения тел вращения, у которых оси вращения лежат в одной плоскости, параллельной плоскости проекций π2 (Рисунок 8.4). Следовательно, данная плоскость является плоскостью симметрии пересекающихся тел, параллельная плоскости проекций π2. Это означает, что линия пересечений тел проецируется на плоскость проекций π2 как кривая второго порядка – парабола.
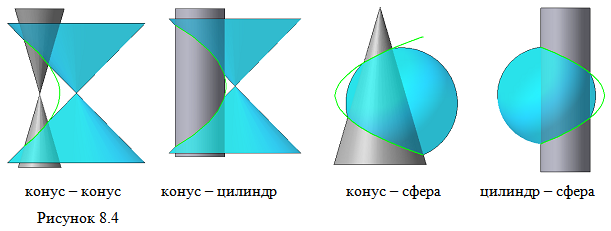
8.2. Алгоритм построения точек кривой пересечения двух поверхностей
- Выполним анализ кривых пересечения цилиндра и конуса (Рисунок 8.5): у данных тел есть общая плоскость симметрии, параллельная плоскости проекций π2, следовательно, (согласно второй теореме Монжа) на π2 кривые пересечения тел 4-го порядка проецируются в виде кривых второго порядка. Поскольку при этом получается две ветви, следовательно, это будет гипербола.
- Строим характерные точки: пересечение крайних образующих на π2 цилиндра и конуса, точки 1, 2, 3, 4.
- Для нахождения точек, лежащих на крайних образующих на π1 цилиндра, введём плоскость σ⊥π2 и σ//π1 проходящую через фронтальную проекцию оси вращения цилиндра. В результате данная плоскость пересечет цилиндр по крайним образующим, а конус – по окружности радиусом Rσ. Построенные на π1 сечения пересекутся в точках 5, 6, 7, 8. По линии проекционной связи строим их фронтальные проекции.
- Для построения самых близких друг к другу точек кривой на π2 введём плоскость γ⊥π3, проходящую через вершину конуса и касательную к цилиндру. Данная плоскость пересечёт конус по треугольнику SAB. Построив образующие конуса SA, SB и цилиндра 11-12, на их пересечении определим точки 11, 12. Точки 9, 10 построим симметрично точкам 11 и 12.
- Для построения дополнительных промежуточных точек, можно ввести вспомогательные секущие плоскости (посредники) параллельно σ.
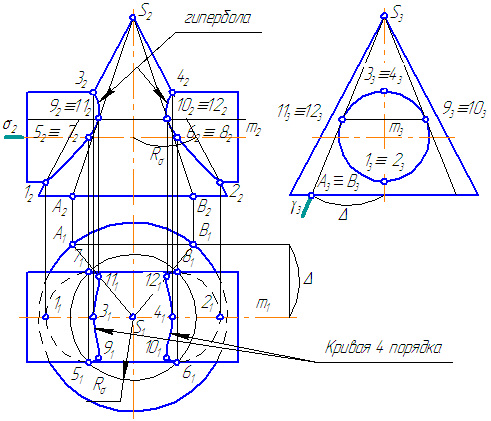
Рисунок 8.5 – Построение линии пересечения конуса и цилиндра
На анимации ниже представлена последовательность построения линии пересечения конуса и цилиндра.
Рисунок 8.6 – Последовательность построения линии пересечения конуса и цилиндра
8.3. Задачи для самостоятельной работы
1-2. Построить линию пересечения поверхностей вращения (Рисунки 8.7, 8.8).
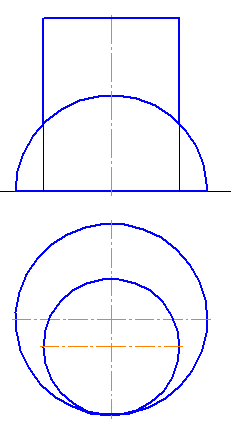
Рисунок 8.7
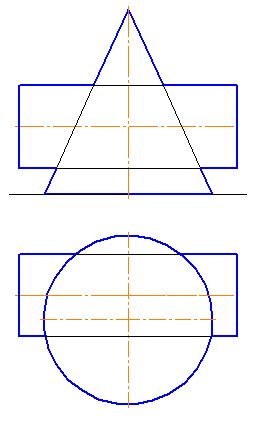
Рисунок 8.8
По вопросам репетиторства по начертательной геометрии, вы можете связаться любым удобным способом в разделе Контакты. Возможно очное и дистанционное обучение по Skype: 1250 р./ак.ч.