Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
В первой части нашей работы мы должны будем с вами с
помощью экспериментальной установки исследовать зависимость периода свободных
колебаний нитяного маятника от его длины.
Для выполнения этой работы нам предлагается использовать
оборудование из комплекта № 5 в составе: штатив с муфтой и креплением для нити,
груз с крючком, нить, электронный секундомер и метровую линейку или мерную
ленту.
Прежде чем приступить к работе давайте с вами вспомним, что маятником
называется твёрдое тело, совершающее под действием приложенных сил
колебания около неподвижной точки или вокруг оси.
Существует несколько видов маятников. Но наиболее часто
встречающиеся, это пружинный маятник, представляющий собой груз,
прикреплённый к пружине, и способный совершать колебания вдоль горизонтальной
или вертикальной оси.
И нитяной маятник — шарик, подвешенный на нити,
способный совершать колебательное движение.
Теперь давайте вспомним, что любое колебательное движение
характеризуется амплитудой, частотой и периодом колебаний.
Амплитуда колебаний — это наибольшее смещение
колеблющегося тела от положения равновесия.
Частота
колебаний — это
число колебаний, совершаемых телом за единицу времени. Обозначается она
греческой буквой ν. А единицей её измерения в системе СИ является герц
[Гц]:
И, наконец, период
колебаний — это наименьший промежуток времени, через который полностью
повторяется состояние колебательной системы. Обозначается период большой буквой
Т. Единица измерения — секунда [с]:
Ещё в
середине XVII века нидерландский учёный Христиан Гюйгенс показал, что «период малых
колебаний математического маятника зависит от длины подвеса и ничего более»:
И в первой
части нашей работы мы с вами должны будем проверить, как зависит период
колебаний маятника от его длины.
Итак, для
начала давайте соберём экспериментальную установку. Для этого закрепим
перекладину в муфте у верхнего края стержня штатива. Штатив разместим на столе
так, чтобы конец перекладины выступал за край поверхности стола. Далее подвесим
к перекладине с помощью нити груз из набора. И сразу же установим длину нити в
1 м. Электронный секундомер переведём в ручной режим работы.
Далее мы
сделаем рисунок нашей установки. Для этого нарисуем сначала штатив с
горизонтальной стойкой. И «привязываем» к стойке нить с грузом, размер которого
много меньше длины нити — это положение равновесия маятника. Далее изображаем
маятник в положении максимального отклонения (не более 15° от положения
равновесия.
Теперь
запишем формулы, которыми будем пользоваться при выполнении данной работы. Как
мы уже вспоминали, период колебаний равен отношению промежутка времени,
в течение которого тело совершило N полных колебаний, к числу этих
колебаний:
Так как нам необходимо будет провести несколько измерений, то
давайте с вами составим таблицу. В первой колонке мы укажем номера опытов. Во
второй колонке мы запишем значения длины маятника, которые нам даны в условии
задания. Число колебаний маятника мы запишем в третью колонку (во всех опытах
оно будет одинаковым и равно 30). Четвёртую колонку мы отведём для записи
времени совершения заданного числа колебаний. А в последнюю колонку будем
записывать значения периода колебаний маятника.
Теперь приступим непосредственно к работе. Итак, отклоняем
нить маятника на угол не более 10—15° (можно помочь себе транспортиром). Затем
отпускаем груз и даём маятнику совершить два — три полных колебания, чтобы
процесс колебаний стал установившимся. В момент прохождения маятником крайнего
положения запускаем секундомер. Теперь нам остаётся только дождаться, пока
маятник не совершит 30 полных колебаний. По окончании последнего колебаний
останавливаем секундомер.
Значение промежутка времени, за которое маятник совершил
заданное число колебаний, записываем в таблицу с учётом погрешности измерения:
Теперь уменьшим длину нити маятника в два раза и повторим
эксперимент. По окончании тридцатого колебания останавливаем секундомер и
записываем значение промежутка времени в таблицу.
Наконец уменьшаем длину маятника до 25 см и, включив секундомер,
вновь отсчитываем 30 полных колебаний. Не забываем записать в таблицу значение
промежутка времени с учётом погрешности измерения:
Прямые измерения мы с вами завершили. Теперь определяем
период колебаний. Для этого подставляем в расчётную формулу значения
промежутков времени и числа полных колебаний для каждого из трёх случаев:
Теперь хорошо видно, что чем меньше длина нити маятника, тем
меньше его период колебаний. Поэтому в выводе напишем: при уменьшении
длины нити период свободных колебаний нитяного маятника уменьшается.
Во второй части работы мы с вами должны будем
проверить, зависит ли период колебаний нитяного маятника от массы груза.
Оборудование мы будем использовать практически то же самое:
штатив с муфтой и креплением для нити, набор грузов с крючками, нить,
электронный секундомер и метровую линейку или мерную ленту.
Итак, для
начала давайте соберём экспериментальную установку. Для этого закрепим
перекладину в муфте у верхнего края стержня штатива. Штатив разместим на столе
так, чтобы конец перекладины выступал за край поверхности стола. Далее подвесим
к перекладине с помощью нити один груз из набора. Длина маятника по условию
задания у нас должна быть равна 1 м. Электронный секундомер переведём в ручной
режим работы.
Далее мы
сделаем рисунок нашей установки. Для этого нарисуем сначала штатив с
горизонтальной стойкой. И «привязываем» к стойке нить с грузом, размер которого
много меньше длины нити — это положение равновесия маятника. Далее изображаем
маятник в положении максимального отклонения (не более 15° от положения
равновесия.
Теперь
запишем формулы, которыми будем пользоваться при выполнении данной работы. Как
мы уже вспоминали, период колебаний равен отношению промежутка времени,
в течение которого тело совершило N полных колебаний, к числу этих
колебаний:
Так как нам необходимо будет провести несколько измерений, то
давайте с вами составим таблицу. В первой колонке мы укажем номера опытов. Во
второй колонке мы запишем значения массы маятника, которые нам даны в условии
задания. Число колебаний маятника мы запишем в третью колонку (во всех опытах
оно будет одинаковым и равно 30). Четвёртую колонку мы отведём для записи
времени совершения заданного числа колебаний. А в последнюю колонку будем
записывать значения периода колебаний маятника.
Теперь приступим непосредственно к работе. Итак, отклоняем
нить маятника на угол не более 10—15° (можно помочь себе транспортиром). Затем
отпускаем груз и даём маятнику совершить два — три полных колебания, чтобы
процесс колебаний стал установившимся. В момент прохождения маятником крайнего
положения запускаем секундомер. Теперь нам остаётся только дождаться, пока
маятник не совершит 30 полных колебаний. По окончании последнего колебаний
останавливаем секундомер. Значение промежутка времени, за которое маятник
совершил 30 колебаний, записываем в таблицу с учётом погрешности измерения:
Теперь подвесим к маятнику второй груз и повторим
эксперимент. По окончании тридцатого колебания останавливаем секундомер и
записываем значение промежутка времени в таблицу.
Наконец, увеличиваем массу маятника до 300 г и, включив секундомер,
вновь отсчитываем 30 полных колебаний. Не забываем записать в таблицу значение
промежутка времени с учётом погрешности измерения:
Прямые измерения мы с вами завершили. Теперь определяем
период колебаний. Для этого подставляем в расчётную формулу значения
промежутков времени и числа полных колебаний для каждого из трёх случаев:
Таким образом видим, что в пределах погрешности измерений
период колебаний маятника остаётся неизменным. Поэтому в выводе мы
напишем: период колебаний нитяного маятника не зависит от массы груза.
Что касается исследования зависимости частоты колебаний
маятника от его длины, то вся работа остаётся примерно такой же,
что и в нашей первой работе, где мы определяли период колебаний. Отличие будет
состоять только в расчётной формуле. Ведь частота определяет число колебаний,
совершаемых телом за единицу времени:
То же самое
касается и исследования зависимости
частоты колебаний нитяного маятника от массы груза. Ведь в любом
случае, частота — это величина, обратная периоду колебаний.
Дано: l (длина нити, к которой подвесили груз) = 1,6 м.
Справочные величины: по условию gл (ускорение свободного падения на поверхности Луны) = 1,6 м/с2.
Период, с которым будет колебаться подвешенный на нити груз, вычислим по формуле: T = 2 * Π * √(l / gл).
Произведем расчет: T = 2 * 3,14 * √(1,6 / 1,6) = 6,28 с.
Ответ: Период колебаний, подвешенного к нити груза, составит 6,28 с.
Задачи на Механические колебания с решениями
Формулы, используемые на уроках «Задачи на Механические колебания».
Название величины |
Обозначение |
Единица измерения |
Формула |
Амплитуда колебаний |
A |
м |
|
Период колебаний |
T |
с |
T = 1 / v ;T = t / N |
Частота колебаний |
v |
Гц |
v = 1 / T ;v = N / t |
Число колебаний за какое-то время |
N |
N = t /T ;N = vt |
|
Время |
t |
с |
t = NT ;t = N / v |
Циклическая частота колебаний |
ω |
Гц |
|
Период колебаний пружинного маятника |
T |
c |
|
Период колебаний математического маятника |
T |
c |
|
Уравнение гармонических колебаний |
x(t) = Asin(ωt+φ0) |
ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ
Задача № 1.
Шарик на нити совершил 60 колебаний за 2 мин. Определите период и частоту колебаний шарика.

Задача № 2.
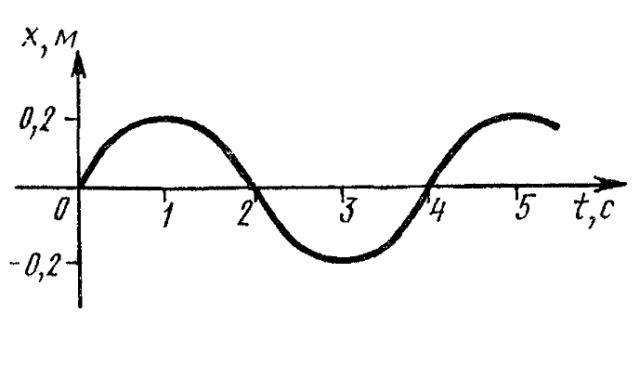
На рисунке изображен график зависимости координаты от времени колеблющегося тела.

По графику определите: 1) амплитуду колебаний; 2) период колебаний; 3) частоту колебаний; 4) запишите уравнение координаты.

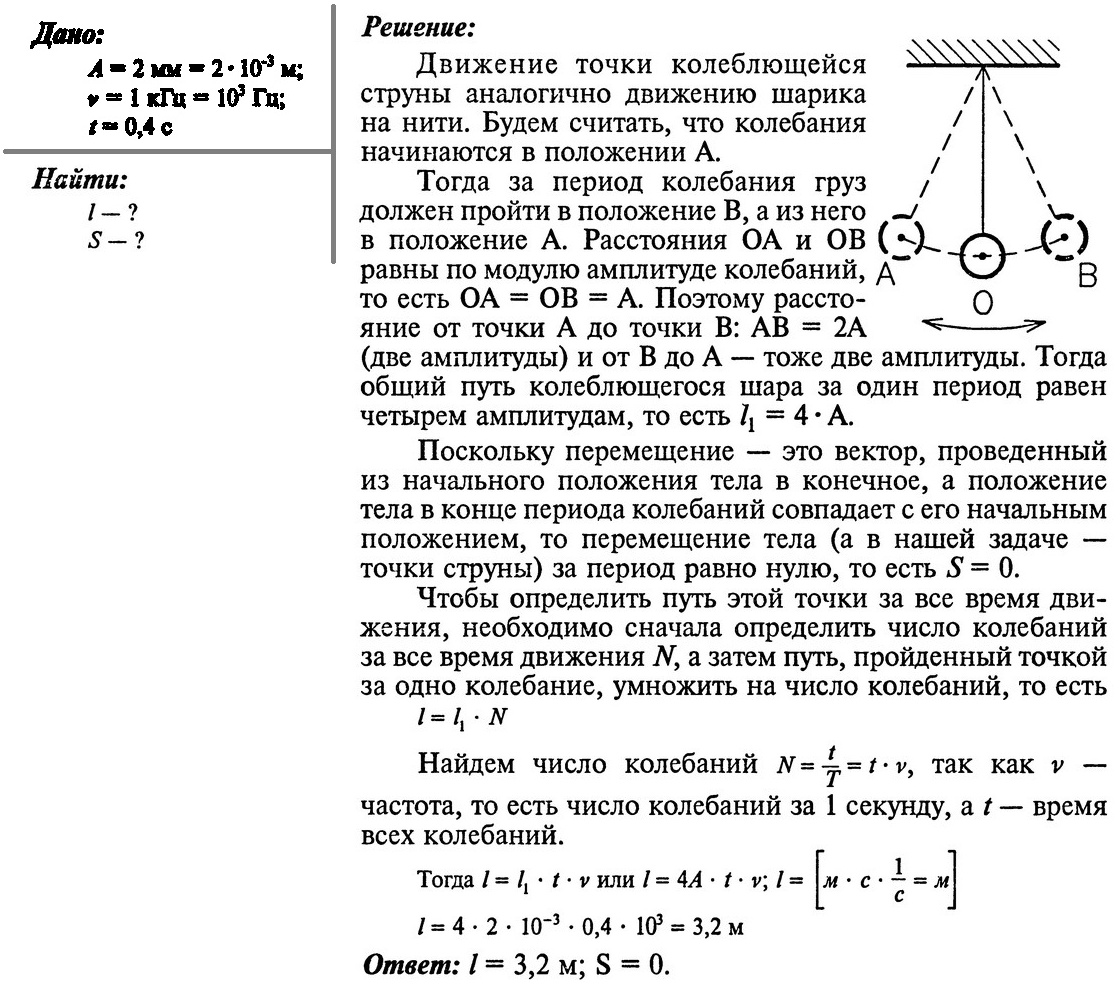
Задача № 3.
Амплитуда незатухающих колебаний точки струны 2 мм, частота колебаний 1 кГц. Какой путь пройдет точка струны за 0,4 с? Какое перемещение совершит эта точка за один период колебаний?
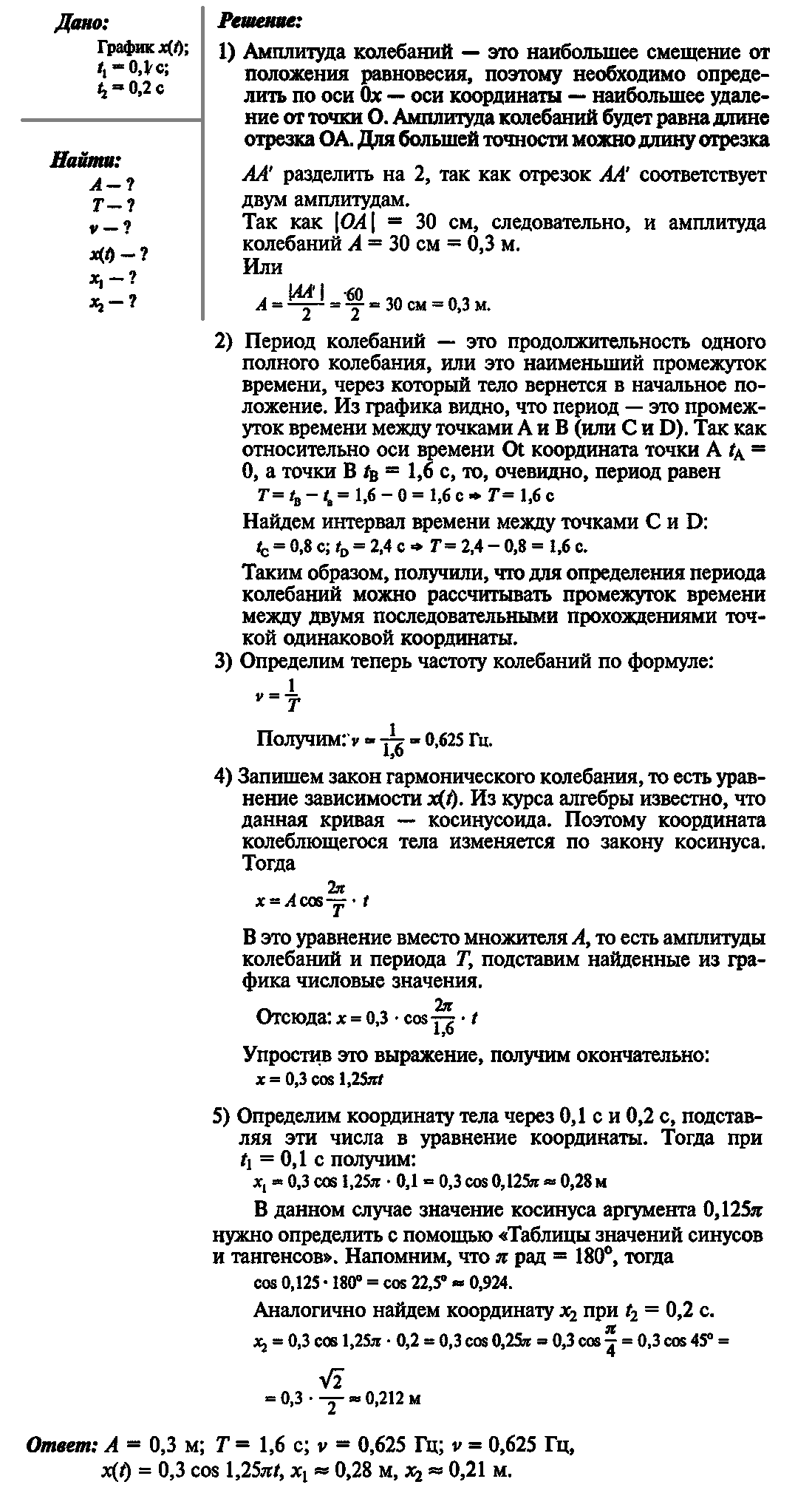
Задача № 4.
Пользуясь графиком изменения координаты колеблющегося тела от времени, определить амплитуду, период и частоту колебаний. Записать уравнение зависимости x(t) и найти координату тела через 0,1 и 0,2 с после начала отсчета времени.

Задача № 5.
Какова длина математического маятника, совершающего гармонические колебания с частотой 0,5 Гц на поверхности Луны? Ускорение свободного падения на поверхности Луны 1,6 м/с2.

Задача № 6.
Груз массой 400 г совершает колебания на пружине с жесткостью 250 Н/м. Амплитуда колебаний 15 см. Найти полную механическую энергию колебаний и наибольшую скорость движения груза.

Задача № 7.
Частота колебаний крыльев вороны в полете равна в среднем 3 Гц. Сколько взмахов крыльями сделает ворона, пролетев путь 650 м со скоростью 13 м/с?

Задача № 8.
Гармоническое колебание описывается уравнением
![]() Чему равны циклическая частота колебаний, линейная частота колебаний, начальная фаза колебаний?
Чему равны циклическая частота колебаний, линейная частота колебаний, начальная фаза колебаний?

Задача № 9.
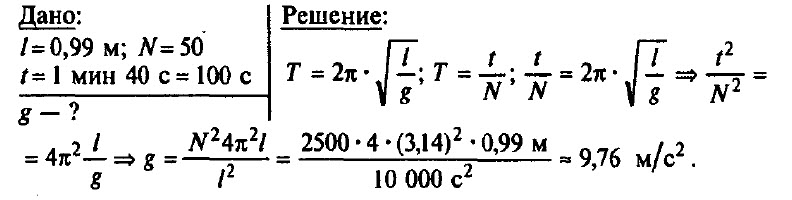
Математический маятник длиной 0,99 м совершает 50 полных колебаний за 1 мин 40 с. Чему равно ускорение свободного падения в данном месте на поверхности Земли? (Можно принять π2 = 9,87.)
Задача № 10.
ОГЭ
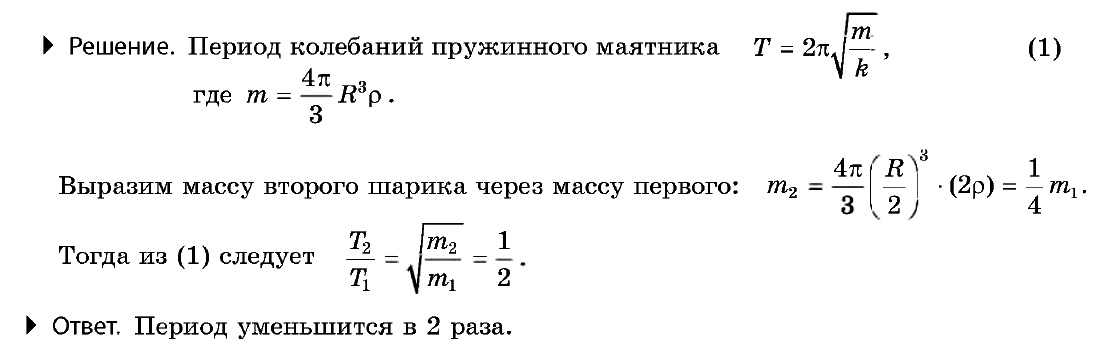
Как и во сколько раз изменится период колебаний пружинного маятника, если шарик на пружине заменить другим шариком, радиус которого вдвое меньше, а плотность — в два раза больше?
Задача № 11.
ЕГЭ
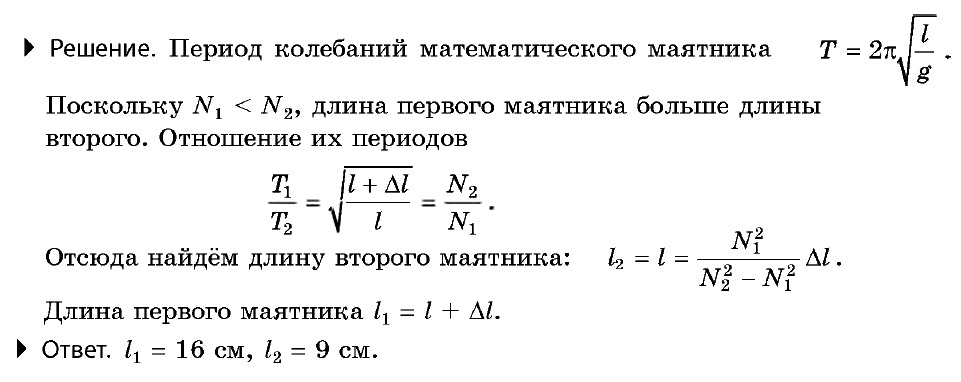
Два математических маятника за одно и то же время совершают — первый N1 = 30, а второй — N2 = 40 колебаний. Какова длина каждого из них, если разность их длин Δl = 7 см?
Краткая теория для решения Задачи на Механические колебания.


Это конспект по теме «ЗАДАЧИ на Механические колебания». Выберите дальнейшие действия:
- Перейти к теме: ЗАДАЧИ на
- Посмотреть конспект по теме ДИНАМИКА: вся теория для ОГЭ (шпаргалка)
- Вернуться к списку конспектов по Физике.
- Проверить свои знания по Физике.
Период колебаний нитяного маятника

4.4
Средняя оценка: 4.4
Всего получено оценок: 167.
4.4
Средняя оценка: 4.4
Всего получено оценок: 167.
Простейшей системой, пригодной для изучения свободных колебаний, является обыкновенный нитяной маятник – груз, подвешенный на нитке. Рассмотрим колебания такого маятника.
Математический маятник
Для вывода формулы периода колебаний нитяного маятника необходимо сделать следующие важные допущения.
- Маятник не имеет потерь энергии при движении, ни от трения о воздух, ни от трения внутри нити.
- Нить нерастяжима и невесома.
- Вся масса маятника сосредоточена в одной точке (точке прикрепления груза).
Маятник, для которого выполняются эти допущения, легко описывается математическими формулами, поэтому он называется «математическим маятником».

Период колебаний математического маятника
Выведем формулу периода колебаний нитяного маятника взяв за идеальную модель математический маятник.
Если масса маятника длиной $l$ описывает колебания по дуге с углом отклонения $α$, то проекция силы тяжести на касательную к траектории (именно по этой касательной направлена мгновенная скорость маятника) равна:
$$F=-mgsinalpha$$
По второму закону Ньютона проекция ускорения на касательную к траектории маятника :
$$a_т={Fover m}$$
Подставив эту формулу в предыдущую, и сократив массу, получаем:
$$a_т=-gsinalpha$$
Учитывая, что для малых углов $sinalpha=alpha$ и отклонение маятника $s=alpha l$, можно записать:
$$a_т=-{gover {l}}s$$
Ускорение – это вторая производная перемещения. В вышей математике доказывается, что единственная функция, вторая производная которой пропорциональна самой себе со знаком минус – это круговая функция. Решением данного уравнения является функция:
$$s(t)=S_{max} cos sqrt{gover l}t$$
Периодом этой функции будет величина:
$$T=2pisqrt {lover g}$$
Данная формула была установлена Х. Гюйгенсом.
Если обратиться к формулам движения и периода колебаний пружинного маятника, можно видеть, что эти формулы почти одинаковы. Жесткости пружины в пружинном маятнике соответствует ускорение свободного падения в математическом маятнике. Длине математического маятника соответствует масса груза в пружинном маятнике. Это говорит о том, что в обоих случаях колебательные процессы имеют один и тот же механизм возникновения – сила, двигающая груз, зависит от отклонения, и направлена всегда против этого отклонения.
Маятник и ускорение свободного падения
Поскольку в формулу периода нитяного маятника входит ускорение свободного падения, эта деталь позволяет использовать колебания маятника для его изменения. При этом необходимо учитывать ограничения, которые приближают реальный маятник к математическому – нить должна быть нерастяжимой, груз иметь малый размер, а максимальное отклонение от вертикали намного меньше длины маятника.
Маятник позволяет обнаруживать даже совсем небольшие изменения ускорения свободного падения. Это позволяло использовать его для уточнения залегания железных руд, которые обладают заметно большей плотностью, по сравнению с обычным грунтом.

Что мы узнали?
Идеальной моделью нитяного маятника является математический маятник. Формула периода свободных колебаний нитяного маятника аналогична формуле периода колебаний пружинного маятника, жесткости пружины соответствует ускорение свободного падения, длине – соответствует масса груза.
Тест по теме
Доска почёта
Чтобы попасть сюда — пройдите тест.
Пока никого нет. Будьте первым!
Оценка доклада
4.4
Средняя оценка: 4.4
Всего получено оценок: 167.
А какая ваша оценка?