Что такое колебательный процесс
Колебания — это движения или процессы, которые повторяются с определенным интервалом времени.
Систему, совершающую колебания, называют колебательной системой или осциллятором.
Исходя из физической природы, колебательные процессы бывают механического, электромагнитного и других видов.
Осторожно! Если преподаватель обнаружит плагиат в работе, не избежать крупных проблем (вплоть до отчисления). Если нет возможности написать самому, закажите тут.
Свободные или собственные колебания — колебания, которые наблюдают в системе, предоставленной себе после выведения из равновесного состояния.
Вынужденными колебаниями называют колебания, происходящие под действием внешней силы, изменяющейся периодически.
При механических колебаниях, которые относят к категории вынужденных:
(F=F_{0}cos cot)
Гармоническими колебаниями называют колебания, определяемые физической величиной, которая изменяется, согласно закону синуса или косинуса.
Разные периодические процессы, повторяющиеся в течение равных временных интервалов, могут быть записаны в виде суммы или суперпозиции гармонических колебаний.
Определение периода колебаний, формула
Колебательный процесс можно представить в виде уравнения. Тогда гармоническое колебание значения х будет представлено следующей формулой:
(x(t)=Atimes cos left(omega _{0}t+phi _{0} right))
Где (x(t)) является отклонением колеблющейся физической величины от равновесного значения;
А представляет собой амплитуду гармонических колебаний;
(omega _{0}) равно циклической или круговой частоте колебаний;
(phi _{0}) является начальной фазой колебаний, характерной для момента времени t=0, что можно определить с помощью выбора начала отсчета времени;
(cp(t)=(co_{0}t+cp_{0})) описывает фазу колебаний в момент времени t, определяется в радианах, соответствует значению колеблющейся величины в данное время.
В случае, когда имеется какая-либо материальная точка с массой m, характеристика х будет соответствовать смещению тела из равновесного положения. Следует заметить, что амплитуда и частота гармонических колебаний обладают постоянными значениями. Исходя из того, что cos меняет значение в интервале от +1 до -1, параметр х будет изменяться от +А до –А. Так как:
(cos left(alpha +2pi right)=cos alpha,)
то х остается без изменений при фазе колебаний, получающей приращение в $$2pi$$
Период колебаний Т представляет собой минимальный временной интервал, в течение которого колебательная система возвращается в то состояние, в котором она находилась в начальный момент времени, определенный произвольно.
В этом случае фаза будет увеличена на (2pi:)
(omega _{0}(t+T)+phi _{0}=left(omega _{0}t+phi _{0} right)+2pi)
Из данного равенства можно вычислить период колебаний:
(T=frac{2pi }{omega _{0}})
Частота колебаний v является величиной, которая обратна периоду колебаний. Это количество полных колебаний, выполняемых за единицу времени:
(v=frac{omega _{0}}{2pi})
На графике изображены гармонические колебания, где а — зависимость смещения х от времени /, б — зависимость скорости vx от времени С, в — зависимость ускорения ах от времени t.
Единицей частоты в СИ является герц (Гц). Это частота периодического периода, в котором в течение 1 секунды выполняется одно полное колебание.
Можно представить, что материальная точка совершает прямолинейные гармонические колебания, относительно оси Х около равновесного положения, которое является началом отсчета координат. Так как движения частицы колебательные, ей присуще скорость и ускорение. Характеристики данного процесса будут записаны таким образом:
Смещение (x=Atimes cos left(omega _{0}t+phi _{0} right))
Скорость (v_{x}=dot{x}=-Aomega _{0}times sin left(omega _{0} t+phi_{0} right)=Aomega _{0}times cos left(omega _{0} t+phi_{0} +frac{pi }{2}right))
Ускорение
(a_{x}=dot{v_{x}}=ddot{x}=-Aomega _{0}times cos left(omega _{0} t+phi_{0} right)=Aomega _{0}^{2}times cos left(omega _{0} t+phi_{0} +pi right))
Как найти период для физического маятника
В случае, когда углы отклонения (varphi) небольшие, физический маятник будет совершать гармонические колебания. Можно считать его вес, приложенным к центру тяжести в точке С. Сила возврата маятника в равновесное положение является составляющей силы тяжести — сила F:
(F=mgtimes sin varphi)
Отрицательное значение правой части уравнения означает, что сила F ориентирована по направлению уменьшения угла (alpha)
Учитывая малый угол (varphi) уравнение можно записать в следующем виде:
(F=mgtimesvarphi)
С помощью основного уравнения динамики, описывающее вращательное движение, можно вывести закон движения физического маятника:
(J=ml^{2})
При условии невозможности определения момента силы в явном виде, дифференциальное уравнение колебаний физического маятника будет записано в такой форме:
(frac{d^{2}varphi }{dt^{2}}+frac{mgl}{J}varphi =0)
В результате сравнения полученного выражения и уравнения гармонических колебаний, получим:
(alpha _{x}(t)+omega ^{2}x(t)=0)
Таким образом, получается, что формула циклической частоты пружинного маятника имеет следующий вид:
(omega =sqrt{frac{mgl}{J}})
В таком случае для расчета периода колебаний математического маятника будет использоваться формула:
(T =frac{2pi }{omega }=2pi sqrt{frac{J}{mgl}})
Исходя из расчетов, можно сделать следующие выводы:
- Период пружинного маятника (T =2pi sqrt{frac{m}{k}})
- Период математического маятника (T =2pi sqrt{frac{L}{g}})
- Период крутильного маятника (T =2pi sqrt{frac{I}{K}})
В приведенных формулах:
- T — период физического маятника;
- J — момент силы маятника относительно оси вращения;
- l — расстояние от оси вращения до центра масс;
- m — масса маятника;
- g=9.8 — ускорение свободного падения.
Примеры решений
Задача № 1
Шариком, привязанным к нити, совершено 60 колебаний в течение 2 минут. Необходимо определить, каковы период и частота колебаний шарика.
Решение
(T =frac{t}{N}=frac{120}{60}=2)
(V=frac{1}{T}=frac{1}{2}=0.5)
Ответ: период колебаний маятника равен 2 секундам, а частота составляет 0,5 Гц.
Задача № 2
Согласно изображенного графика зависимости координаты от времени, необходимо рассчитать характеристики колебательного движения тела.
Решение
А = 20
Т = 0,8
(V=frac{1}{T}=frac{1}{0,8}=1,25)
(x(t)=Asin 2pi Vt=0.2sin 2pi times 1.25t=0.2sin 2.5pi t)
Ответ: амплитуда колебаний маятника составляет 0,2 метра, период колебаний соответствует 0,8 с, частота колебаний равна 1,25 Гц, уравнение координаты будет записано в следующем виде: (x(t)=0.2sin 2.5pi t)
Задача № 3
Необходимо определить, какой длиной обладает математический маятник, который совершает гармонические колебания при частоте 0,5 Гц на поверхности Луны. Ускорение свободного падения в данном случае составляет 1,6 м/с2.
Решение
Период колебаний математического маятника рассчитывается по формуле:
(T =2pi sqrt{frac{L}{g}})
Согласно определению:
(V=frac{1}{T})
Тогда:
(T=frac{1}{V})
Получим равенство:
(frac{1}{V}=2pi sqrt{frac{l}{g}})
Для того чтобы выразить длину маятника, необходимо возвести обе части равенства в квадрат:
(frac{1}{V^{2}}=4pi ^{2}times frac{l}{g}Rightarrow l=frac{g}{4pi ^{2}V^{2}})
(l=frac{1.5}{4*3.14 ^{2}*0.5^{2}}approx 0.16)
Ответ: длина математического маятника примерно составляет 0,16 метра.
Механические колебания.
-
Гармонические колебания.
-
Уравнение гармонических колебаний.
-
Пружинный маятник.
-
Математический маятник.
-
Свободные и вынужденные колебания.
Автор — профессиональный репетитор, автор учебных пособий для подготовки к ЕГЭ Игорь Вячеславович Яковлев
Темы кодификатора ЕГЭ : гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания — это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания — это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия — это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание. Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела — это величина его наибольшего отклонения от положения равновесия.
Период колебаний  — это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
— это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний  — это величина, обратная периоду:
— это величина, обратная периоду:  . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
. Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
к оглавлению ▴
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой  . Положению равновесия отвечает значение
. Положению равновесия отвечает значение  . Основная задача механики в данном случае состоит в нахождении функции
. Основная задача механики в данном случае состоит в нахождении функции ") , дающей координату тела в любой момент времени.
, дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них — синус и косинус — являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на  , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
, можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания — это колебания, при которых координата зависит от времени по гармоническому закону:
") (1)
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина  является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому — амплитуда колебаний.
Аргумент косинуса  называется фазой колебаний. Величина
называется фазой колебаний. Величина  , равная значению фазы при
, равная значению фазы при  , называется начальной фазой. Начальная фаза отвечает начальной координате тела:
, называется начальной фазой. Начальная фаза отвечает начальной координате тела:  .
.
Величина называется  циклической частотой. Найдём её связь с периодом колебаний и частотой
циклической частотой. Найдём её связь с периодом колебаний и частотой  . Одному полному колебанию отвечает приращение фазы, равное
. Одному полному колебанию отвечает приращение фазы, равное  радиан:
радиан:  , откуда
, откуда
 (2)
(2)
 (3)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1):
, x=Acos(2 pi nu t + alpha)") .
.
График функции (1), выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1.
 |
| Рис. 1. График гармонических колебаний |
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину  и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае  , поэтому можно положить
, поэтому можно положить  . Мы получаем закон косинуса:
. Мы получаем закон косинуса:
 .
.
График гармонических колебаний в этом случае представлен на рис. 2.
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае  , так что можно положить
, так что можно положить  . Получаем закон синуса:
. Получаем закон синуса:
 .
.
График колебаний представлен на рис. 3.
 |
| Рис. 3. Закон синуса |
к оглавлению ▴
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1). Дифференцируем это равенство:
") . (4)
. (4)
Теперь дифференцируем полученное равенство (4):
") . (5)
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем  :
:
 . (6)
. (6)
Это соотношение называется уравнением гармонических колебаний. Его можно переписать и в таком виде:
 . (7)
. (7)
C математической точки зрения уравнение (7) является дифференциальным уравнением. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
-решением уравнения (7) является всякая функция вида (1) с произвольными  ;
;
-никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6), (7) описывают гармонические колебания с циклической частотой  и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
и только их. Две константы определяются из начальных условий — по начальным значениям координаты и скорости.
к оглавлению ▴
Пружинный маятник.
Пружинный маятник — это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу  , жёсткость пружины равна
, жёсткость пружины равна  .
.
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости  со стороны пружины. Второй закон Ньютона для груза в проекции на ось
со стороны пружины. Второй закон Ньютона для груза в проекции на ось  имеет вид:
имеет вид:
 . (8)
. (8)
Если  (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и
(груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и  . Наоборот, если
. Наоборот, если  , то
, то  . Знаки и
. Знаки и  всё время противоположны, поэтому закон Гука можно записать так:
всё время противоположны, поэтому закон Гука можно записать так:

Тогда соотношение (8) принимает вид:

или
 .
.
Мы получили уравнение гармонических колебаний вида (6), в котором
 .
.
Циклическая частота колебаний пружинного маятника, таким образом, равна:
 . (9)
. (9)
Отсюда и из соотношения  находим период горизонтальных колебаний пружинного маятника:
находим период горизонтальных колебаний пружинного маятника:
 . (10)
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10).
к оглавлению ▴
Математический маятник.
Математический маятник — это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна  . Сопротивлением воздуха пренебрегаем.
. Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
 ,
,
и спроектируем его на ось :
 .
.
Если маятник занимает положение как на рисунке (т. е. ), то:
 .
.
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
 .
.
Итак, при любом положении маятника имеем:
 . (11)
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство  . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство
. При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство  . Воспользуемся им в формуле (11):
. Воспользуемся им в формуле (11):
 ,
,
или
 .
.
Это — уравнение гармонических колебаний вида (6), в котором
 .
.
Следовательно, циклическая частота колебаний математического маятника равна:
 . (12)
. (12)
Отсюда период колебаний математического маятника:
 . (13)
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
к оглавлению ▴
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6).
 |
| Рис. 6. Затухающие колебания |
Вынужденные колебания — это колебания, совершаемые системой под воздействием внешней силы ") , периодически изменяющейся во времени (так называемой вынуждающей силы).
, периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна  , а вынуждающая сила зависит от времени по гармоническому закону:
, а вынуждающая сила зависит от времени по гармоническому закону:
=F_{0}cos omega t") .
.
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7.
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты  наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:
наступает резонанс — явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы:  , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,
, и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний,  , а амплитуда колебаний возрастает до бесконечности при
, а амплитуда колебаний возрастает до бесконечности при  .
.
Благодарим за то, что пользуйтесь нашими материалами.
Информация на странице «Механические колебания.» подготовлена нашими редакторами специально, чтобы помочь вам в освоении предмета и подготовке к экзаменам.
Чтобы успешно сдать нужные и поступить в высшее учебное заведение или колледж нужно использовать все инструменты: учеба, контрольные, олимпиады, онлайн-лекции, видеоуроки, сборники заданий.
Также вы можете воспользоваться другими статьями из разделов нашего сайта.
Публикация обновлена:
08.05.2023
Формула периода колебаний математического маятника
Формула периода колебаний математического маятника
Математический маятник
Определение
Математический маятник — это частный случай физического маятника, масса которого находится в одной точке.
Обычно математическим маятником считают маленький шарик (материальную точку), имеющий большую массу, подвешенный на длинной нерастяжимой нити (подвесе). Это идеализированная система, которая совершает колебания под воздействием силы тяжести. Только для углов порядка 50-100 математический маятник является гармоническим осциллятором, то есть совершает гармонические колебания.
Изучая качание паникадила на длинной цепи Галилей изучал свойства математического маятника. Он понял, что период колебаний данной системы не зависит от амплитуды при малых углах отклонения.
Формула для периода колебаний математического маятника
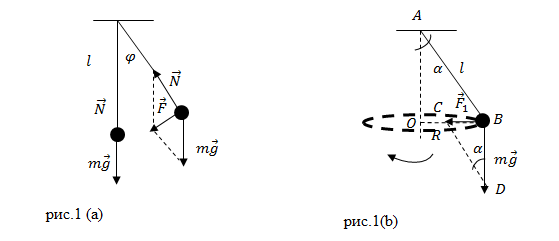
Пусть точка подвеса маятника неподвижна. Груз, подвешенный к нити маятника, движется по дуге окружности (рис.1(a)) с ускорением, на него действует некоторая возвращающая сила ($overline{F}$). Данная сила изменяется при движении груза. В результате чего расчет движения становится сложным. Введем некоторые упрощения. Пусть маятник совершает колебания не в плоскости, а описывает конус (рис.1 (b)). Груз в этом случае перемещается по окружности. Период интересующих нас колебаний будет совпадать с периодом конического движения груза. Период обращения конического маятника по окружности равен времени, которое тратит груз на один виток по окружности:
[T=frac{L}{v}=frac{2pi R}{v}left(1right),]
где $L$ — длина окружности; $v$ — скорость движения груза. Если углы отклонения нити от вертикали малые (небольшие амплитуды колебаний) то полагают, что возвращающая сила ($F_1$) направлена по радиусу окружности, которую описывает груз. Тогда эта сила равна центростремительной силе:
[F_1=frac{mv^2}{R}left(2right).]
Рассмотрим подобные треугольники: AOB и DBC (рис.1 (b)).
[F_1=mg{sin alpha =mgfrac{R}{l} }left(3right).]
Приравниваем правые части выражений (2) и (3), выражаем скорость движения груза:
[frac{mv^2}{R}=mgfrac{R}{l} to v=Rsqrt{frac{g}{l}}left(4right).]
Полученную скорость подставим в формулу (1), имеем:
[T=frac{2pi R}{Rsqrt{frac{g}{l}}}to ]
[T=2pi sqrt{frac{l}{g}}left(5right).]
Из формулы (5) мы видим, что период математического маятника зависит только от длины его подвеса (расстояния от точки подвеса до центра тяжести груза) и ускорения свободного падения. Формулу (5) для периода математического маятника называют формулой Гюйгенса, она выполняется, когда точка подвеса маятника не движется.
Используя зависимость периода колебаний математического маятника от ускорения свободного падения, определяют величину данного ускорения. Для этого измеряют длину маятника, рассматривая большое количество колебаний, находят период $T$, затем вычисляют ускорение свободного падения.
Примеры задач с решением
Пример 1
Задание. Как известно, величина ускорения свободного падения зависит от широты. Каково ускорение свободного падения на широте Москвы, если период колебаний математического маятник длиной $l=2,485cdot {10}^{-1}$м равен T=1 c?textit{}
Решение. За основу решения задачи примем формулу периода математического маятника:
[T=2pi sqrt{frac{l}{g}}left(1.1right).]
Выразим из (1.1) ускорение свободного падения:
[g=lfrac{4{pi }^2}{T^2}.]
Вычислим искомое ускорение:
[g=0,2485cdot frac{4{pi }^2}{1^2}=9,81 (frac{м}{с^2}).]
Ответ. $g=9,81frac{м}{с^2}$
Пример 2
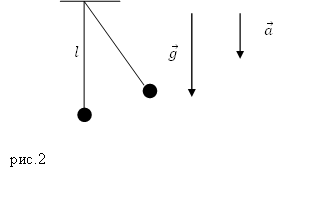
Задание. Каким будет период колебаний математического маятника, если точка его подвеса движется вертикально вниз 1) с постоянной скоростью? 2) с ускорением $a$? Длина нити этого маятника равна $l.$
Решение. Сделаем рисунок.
1) Период математического маятника, точка подвеса которого движется равномерно, равен периоду маятника с неподвижной точкой подвеса:
[T_1=2pi sqrt{frac{l}{g}}left(2.1right).]
2) Ускорение точки подвеса маятника можно рассматривать как появление дополнительной силы, равной $F=ma$, которая направлена против ускорения. То есть, если ускорение направлено вверх, то дополнительная сила направлена вниз, значит, она складывается с силой тяжести ($mg$). Если точка подвеса движется с ускорением, направленным вниз, то дополнительная сила вычитается из силы тяжести.
Период математического маятника, который совершает колебания и у которого точка подвеса движется с ускорением, найдем как:
[T_2=2pi sqrt{frac{l}{a_p}}left(2.2right),]
где:
[a_p=g-a left(2.3right),]
тогда:
[T_1=2pi sqrt{frac{l}{g-a}}.]
Ответ. 1) $T_1=2pi sqrt{frac{l}{g}}$; 2) $T_1=2pi sqrt{frac{l}{g-a}}$
Читать дальше: формула периода колебаний пружинного маятника.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Период колебаний физического маятника
Для
того, чтобы найти период колебаний
физического маятника, необходимо решить
уравнение качания.
Для этого умножим
левую 
и
правую часть этого уравнения на ![]()
.
Тогда:
.
Интегрируя
это уравнение, получаем.

,
где ![]()
произвольная
постоянная. Её можно найти из граничного
условия, что в моменты ![]()
.
Получаем: ![]()
.
Подставляем и преобразовываем получившееся
уравнение:

.
Отделяем
переменные и интегрируем это уравнение:

.
Удобно
сделать замену переменной, полагая ![]()
.
Тогда искомое уравнение принимает вид:

.
Здесь ![]()
— нормальный
эллиптический интеграл Лежандра 1-го
рода.
Для периода колебаний получаем формулу:

.
Здесь ![]()
— полный
нормальный эллиптический интеграл
Лежандра 1-го рода.
Раскладывая его в ряд, можно получить
удобную для практических вычислений
формулу:

.
[Править]Период малых колебаний физического маятника
Если
амплитуда колебаний
мала,
то корень в знаменателе эллиптического
интеграла приближенно равен единице.
Такой интеграл легко берется, и получается
хорошо известная формула малых колебаний:

.
Эта
формула даёт результаты приемлемой
точности (ошибка менее 1 %) при углах,
не превышающих 4°.
Следующий
порядок приближения можно использовать
с приемлемой точностью (ошибка менее
1 %) при углах до 1 радиана (≈60°)

.
Вопрос 4. Энергия гармонических колебаний
При механических колебаниях
колеблющееся тело (или материальная
точка) обладает кинетической и
потенциальной энергией. Кинетическая энергия
тела W:
![]()
(Скорость
тела v = ds/dt)
Для
вычисления потенциальной энергии тела
воспользуемся самой общей формулой,
связывающей силу и потенциальную энергию
тела в поле этой силы:

где
U — потенциальная энергия, набираемая
(или теряемая) телом, движущимся в силовом
поле F от точки 0 (точки, в которой
потенциальная энергия принимается
равной 0) до точки х.
Для
силы, линейно зависящей от смещения
(как в случае наших механических
маятников, такие силы носят общее
название квазиупругих сил) мы имеем:
![]()
![]()
![]()
![]()
|
для кинетической и |
1.
Полная механическая энергия тела не
изменяется при колебаниях: ![]()
2.
Частота колебаний кинетической и
потенциальной энергии в 2 раза больше
частоты колебаний маятника.
3.
Колебания кинетической и потенциальной
энергии сдвинуты друг относительно
друга по фазе на (на
полпериода). Когда кинетическая энергия
достигает максимума, потенциальная —
минимума (нуля) и наоборот. Энергия при
колебаниях постоянно перекачивается
из потенциальной в кинетическую и
обратно.
Вопрос 5.
Ускоре́ние
свобо́дного паде́ния g (оно
же ускорение силы тяжести), — ускорение,
придаваемое телу в вакууме силой
тяжести,
то есть геометрической
суммой гравитационногопритяжения
планеты (или другого астрономического
тела) и сил
инерции,
вызванных её вращением, за
исключением кориолисовых
сил инерции[1].
В соответствии со вторым
законом Ньютона,
ускорение свободного падения численно
равно силе тяжести, воздействующей на
объект единичной массы.
Значение
ускорения свободного падения на
поверхности Земли обычно
принимают равным 9,8 или 10 м/с².
Стандартное («нормальное») значение,
принятое при построении систем единиц, g =
9,80665 м/с²[2],
а в технических расчётах обычно
принимают g =
9,81 м/с².
Стандартное
значение g было
определено как «среднее» в каком-то
смысле ускорение
свободного падения на
Земле, примерно равно ускорению свободного
падения на широте45,5°
на уровне
моря.
Реальное
ускорение свободного падения на
поверхности Земли зависит от широты,
времени суток и других факторов. Оно
варьируется от 9,780 м/с² на экваторе до
9,832 м/с² наполюсах[3].
Оно может быть вычислено (в м/с²) по
эмпирической формуле:
![]()
где ![]()
—
широта рассматриваемого места,
— высота
над уровнем моря в метрах.[4] Эта
формула применима лишь в ограниченном
диапазоне высот от 0 до нескольких
десятков км, где убывание ускорения
свободного падения с высотой можно
считать линейным (на самом же деле оно
убывает квадратично).
Как
в лабораторке измеряли я хз ибо проебал^^
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Период колебаний маятника — наименьший промежуток времени, за который осциллятор совершает одно полное колебание

Период пружинного маятника 
Период математического маятника 
Период физического маятника 
Период крутильного маятника 

В Формуле мы использовали :
 — Период колебаний маятника
— Период колебаний маятника
 — Масса груза, или масса маятника
— Масса груза, или масса маятника
 — Жесткость пружины
— Жесткость пружины
 — Длина подвеса
— Длина подвеса
 — Ускорение свободного падения
— Ускорение свободного падения
 — Момент инерции маятника относительно оси вращения
— Момент инерции маятника относительно оси вращения
 — Расстояние от оси вращения до центра масс
— Расстояние от оси вращения до центра масс
 — Момент инерции тела
— Момент инерции тела
 — Вращательный коэффициент жёсткости маятника
— Вращательный коэффициент жёсткости маятника