
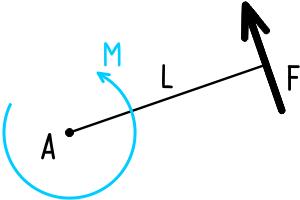
Плечо силы — кратчайшее расстояние между линией действия силы и связанной с ней точкой (полюсом или осью вращения) при создании силой момента.
Определяется длинной нормали (перпендикуляра) к линии усилия проведенной из рассматриваемой точки.
Обозначается: L, l или h. Измеряется в метрах [м].
Плечо силы – один из двух множителей определяющих момент силы.
Наш короткий видеоурок про момент и плечо силы с примерами:
Другие видео
О плече силы можно говорить только тогда, когда есть прямая связь между силой и точкой относительно которой возникает момент.
Порядок нахождения плеча силы
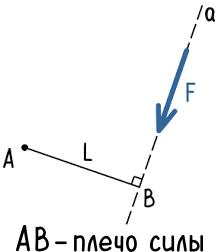
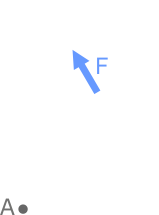
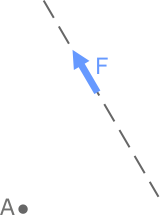
Рассмотрим порядок нахождения плеча силы F относительно точки A.

Для этого покажем прямую a, по направлению действия силы F
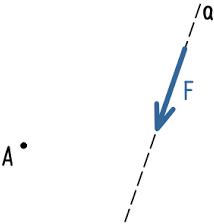
Из точки A опустим перпендикуляр к прямой a.
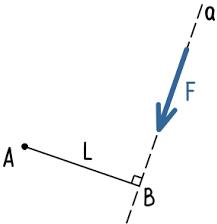
Длина этого перпендикуляра является плечом силы.
Примеры определения плеча силы
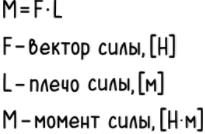
- Сила расположена перпендикулярно оси стержня и известно расстояние между точками A и B.

Плечо силы относительно точки A равно длине отрезка AB. - Сила расположена под определенным углом к оси стержня
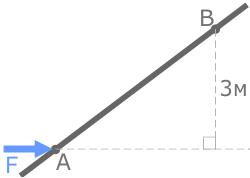
Плечо силы относительно точки B составляет AB×cos30° - Известно расстояние от точки до линии действия силы
Плечо силы относительно точки B равно 3м.


Примеры решения задач >
Момент силы >
Сохранить или поделиться с друзьями
Вы находитесь тут:
На нашем сайте Вы можете получить решение задач и онлайн помощь
Подробнее
Решение задач и лекции по технической механике, теормеху и сопромату
Формула плеча силы в физике
Формула плеча силы
Определение и формула плеча силы
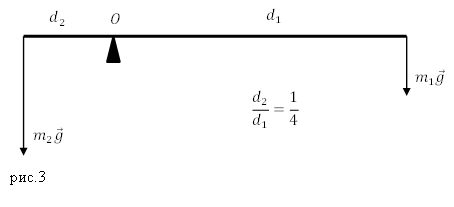
Рассмотрим рычаг с осью вращения находящийся в точке О. (рис.1). Силы ${overline{F}}_1$ и ${overline{F}}_2$, действующие на рычаг направлены в одну сторону.
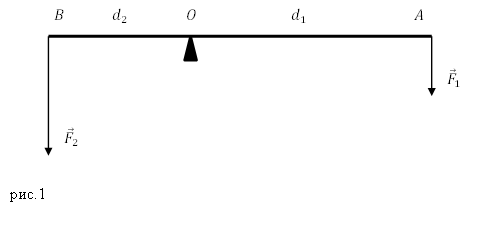
Минимальное расстояние между точкой опоры (точка О) и прямой, вдоль которой действует на рычаг сила, называют плечом силы.
Для нахождения плеча силы следует из точки опоры опустить перпендикуляр к линии действия силы. Длинна данного перпендикуляра и станет плечом рассматриваемой силы. Так, на рис.1 расстояние $left|OAright|=d_1$- плечо силы $F_1$; $left|OAright|=d_2$- плечо силы $F_2$.
Рычаг находится в состоянии равновесия, если выполняется равенство:
[frac{F_1}{F_2}=frac{d_2}{d_1}left(1right).]
Предположим, что материальная точка движется по окружности (рис.2) под действием силы $overline{F}$ (сила действует в плоскости движения точки). В таком случае угловое ускорение ($varepsilon $) точки определяется тангенциальной составляющей ($F_{tau }$) силы $overline{F}$:
[mRvarepsilon =F_{tau }left(2right),]
где $m$ — масса материальной точки; $R$ — радиус траектории движения точки; $F_{tau }$ — проекция силы на направление скорости движения точки.
Если угол $alpha $ — это угол между вектором силы $overline{F}$ и радиус — вектором $overline{R}$, определяющим положение рассматриваемой материальной точки (Этот радиус- вектор проведен из точки О в точку А на рис.2), тогда:
[F_{tau }=F{sin alpha left(3right). }]
Расстояние $d$ между центром O и линией действия силы $overline{F}$ называют плечом силы. Из рис.2 следует, что:
[d=R{sin alpha left(4right). }]
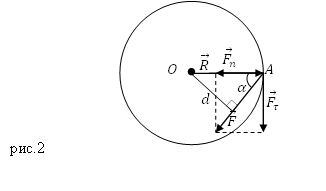
Если на точку будет действовать сила ($overline{F}$), направленная по касательной к траектории ее движения, то плечо силы будет равно $d=R$, так как угол $alpha $ станет равен $frac{pi }{2}$.
Момент силы и плечо
Понятие плечо силы иногда используют, для записи величины момента силы ($overline{M}$), который равен:
[overline{M}=left[overline{r}overline{F}right]left(5right),]
где $overline{r}$ — радиус — вектор проведенный к точке продолжения силы$ overline{F}$. Модуль вектора момента силы равен:
[M=F{rsin alpha = }Fd left(6right).]
Построение плеча силы
И так, плечом силы называют длину перпендикуляра, который проводят из некоторой выбранной точки, иногда ее называют полюсом (выбираемой произвольно, но при рассмотрении одной задачи один раз). При рассмотрении задач точку О выбирают обычно на пересечении нескольких сил) к силе (рис.3 (а)). Если точка О будет лежать на одной прямой с силами или на самой силе, то плечи сил будут равны нулю.
Если перпендикуляр не получается построить, то вектор силы продлевают в нужном направлении, после этого строят перпендикуляр (рис.3 (б)).
Примеры задач с решением
Пример 1
Задание. Какова масса меньшего тела ($m_1$), если его уравновешивает тело массой $m_2={rm 2 }$кг? Тела находятся на невесомом рычаге (рис.3) отношение плеч рычага 1:4?
Решение. Основой решения задачи является правило равновесия рычага:
[frac{F_1}{F_2}=frac{d_2}{d_1}left(1.1right),]
где силы, действующие на концы рычага равны по модулю силам тяжести, которые действуют на тела, следовательно, формулу (1.1) перепишем в виде:
[frac{m_1g}{m_2g}=frac{d_2}{d_1}to frac{m_1}{m_2}=frac{d_2}{d_1}left(1.2right).]
Из выражения (1.2) получим искомую массу $m_1$:
[m_1=frac{m_2d_2}{d_1}.]
Вычислим искомую массу:
[m_1=2cdot frac{1}{4}=0,5 (кг).]
Ответ. $m_1=0,5 кг$
Пример 2
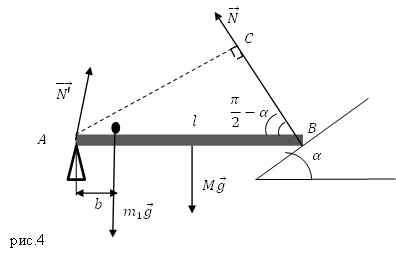
Задание. Однородный стержень длинной $l $и массой $M$ расположен горизонтально. Один конец стержня в точке А закреплён так, что может вращаться вокруг этой точки, другой конец опирается на наклонную плоскость, угол наклона которой к горизонту равен $alpha $. На стержне на расстоянии $b $от точки А лежит небольшой груз. Каковы плечи сил, действующих на стержень?
Решение. Изобразим на рис.4 силы, действующие на стержень. Это: сила тяжести: $Moverline{g}$, вес груза, расположенного на нем $overline{P}=m_1overline{g}$, сила реакции наклонной плоскости: $overline{N}$; сила реакции опоры в точке A: $overline{N}’$.
Плечи сил будем искать относительно точки A. Плечо силы $overline{N’}$ будет равно нулю, так как сила приложена к стержню в точке А:
[d_{N’}=0 left(2.1right).]
Плечо другой силы реакции опоры ($overline{N}$) равно длине перпендикуляра AC:
[d_N=l{sin (90-alpha ) }=l{cos alpha left(2.2right). }]
Плечо силы $Moverline{g}$ из рис.4 , так как сила тяжести приложена к центру масс стержня, который для однородного стержня находится на его середине:
[d_{Mg}=frac{l}{2}left(2.3right).]
Плечо силы $m_1overline{g},$ учитывая, что груз маленький и принимая его за материальную точку, равно:
[d_{m_1g}=b.]
Ответ. $d_{N’}=0;; d_N=l{sin (90-alpha ) }=l{cos alpha left(мright), }d_{Mg}=frac{l}{2}, d_{m_1g}=b$
Читать дальше: формула полезной мощности.

236
проверенных автора готовы помочь в написании работы любой сложности
Мы помогли уже 4 430 ученикам и студентам сдать работы от решения задач до дипломных на отлично! Узнай стоимость своей работы за 15 минут!
Момент силы. Условия равновесия рычага
- Устройство и виды рычагов
- Момент силы
- Правило моментов для двух сил
- Правило моментов для нескольких сил
- Применение рычагов в быту и технике
- Задачи
- Лабораторная работа №9. Проверка условия равновесия рычага
п.1. Устройство и виды рычагов
 |
Рычаг – это твёрдое тело, которое может вращаться вокруг неподвижной опоры.
Рычаг состоит из перекладины и опоры. Назначение рычага – получить выигрыш в силе или расстоянии. |
В зависимости от взаимного расположения точки опоры и нагрузки различают три вида рычагов.
п.2. Момент силы
Плечо силы – это кратчайшее расстояние между точкой опоры и прямой, вдоль которой сила действует на рычаг.
Чтобы найти плечо силы, нужно из точки опоры провести перпендикуляр на линию действия силы.

На рисунке (l_1) – плечо силы (F_1, l_2) — плечо силы (F_2).
Силы вращают рычаг вокруг точки опоры – по часовой или против часовой стрелки.
Ось вращения проходит через точку опоры перпендикулярно плоскости вращения.
На рисунке сила (F_1) вращает рычаг против часовой стрелки, а сила (F_2) — по часовой стрелке.
Момент силы – это произведение силы, вращающей тело, на её плечо. $$ M=Fl $$ В системе СИ единица измерения момента силы — Н·м.
Момент силы определяется не для всего тела, а для некоторой его точки, удалённой от центра (оси) вращения. Эта величина имеет смысл только для вращающихся тел.
п.3. Правило моментов для двух сил
Правило моментов для двух сил
Рычаг находится в равновесии под действием двух сил, если момент силы, вращающей его по ходу часовой стрелки, равен моменту силы, вращающей его против хода часовой стрелки.
 |
$$ F_1l_1=F_2l_2 $$ |
п.4. Правило моментов для нескольких сил
Правило моментов для нескольких сил
Рычаг находится в равновесии, если сумма моментов всех сил, вращающих его по ходу часовой стрелки, равен сумме моментов всех сил, вращающих его против хода часовой стрелки.
Например:
 |
Силы (F_1, F_2, F_3) вращают рычаг против часовой стрелки, а сила (F_4) — по часовой стрелке. Поэтому: $$ F_1l_1+F_2l_2+F_3l_3=F_4l_4 $$ |
п.5. Применение рычагов в быту и технике
Рычаги первого рода
 Весы Предмет, вес которого нужно измерить, — это нагрузка, а гиря создает усилие. Они равны, так как находятся на одном расстоянии от точки опоры. |
 Рычажные весы Точка опоры смещена относительно центра. Грузило передвигается по основанию, пока не уравновесит взвешиваемый объект. |
 Гвоздодёр Усилие ручки увеличивается плечом и вытаскивает гвоздь. Нагрузкой здесь является сопротивление гвоздя. |
 Ручная тележка Небольшое усилие, прикладываемое к ручкам тележки, позволяет поднимать тяжелый груз. |
 Плоскогубцы Составной рычаг, пара простых рычагов, соединенных в точке опоры. Нагрузка — сопротивление предмета захвату инструментом. |
 Ножницы Составной рычаг первого рода, развивают мощное режущее действие очень близко к месту крепления. Нагрузка — сопротивление материала лезвиям. |
Рычаги второго рода
Рычаги третьего рода
п.6. Задачи
Задача 1. Для каждого положения тела укажите плечо силы. 
При необходимости достраиваем линию действия силы и опускаем на неё перпендикуляр из точки опоры. Этот перпендикуляр и есть искомое плечо.
Задача 2. Грузы уравновешены на рычаге. Отношение плеч рычага 1:5. Масса большего груза 2,5 кг. Найдите массу меньшего груза.
Дано:
(frac{l_1}{l_2}=frac 15)
(m_1=2,5 text{кг})
__________________
(m_2-?)

По правилу моментов begin{gather*} F_1l_1=F_2l_2 end{gather*} На обоих концах рычага действуют силы тяжести: $$ F_1=m_1g, F_2=m_2g $$ Получаем: begin{gather*} m_1gl_1=m_2gl_2\[7pt] m_2=frac{m_1l_1}{l_2} end{gather*} Подставляем: $$ m_2=2,5cdot frac 15=0,5 (text{кг}) $$ Ответ: 0,5 кг
Задача 3. На концах рычага действуют силы 15 Н и 60 Н, направленные вниз. Рычаг находится в равновесии. Расстояние между точками приложения сил 1 м. Где расположена точка опоры?
Дано:
(F_1=15 text{Н})
(F_2=60 text{Н})
(l_1+l_2=1 text{м})
__________________
(l_1, l_2-?)

По правилу моментов begin{gather*} F_1l_1=F_2l_2. end{gather*} Получаем систему уравнений begin{gather*} left{ begin{array}{l l} 15l_1=60l_2 \ l_1+l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=4l_2 \ l_1+l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=4l_2 \ 4l_2+l_2=1 end{array} right. Rightarrow \[7pt] Rightarrow left{ begin{array}{l l} l_1=4l_2 \ 5l_2=1 end{array} right. Rightarrow left{ begin{array}{l l} l_1=0,8 \ l_2=0,2 end{array} right. end{gather*} Ответ: 0,8 м от точки приложения первой силы и 0,2 м от точки приложения второй силы.
Задача 4*. К балке, расположенной на двух опорах А и В подвешен груз массой 500 кг. Расстояние от точки подвеса груза к одному из концов балки в 4 раза больше, чем к другому. С какой силой балка давит на каждую из опор? Примите (gapprox 10 text{м/с}^2). Ответ запишите в килоньютонах.
Дано:
(m=500 text{кг})
(gapprox 10 text{м/с}^2)
(OB=4OA)
__________________
(F_A, F_B-?)

Сила тяжести (F_{text{т}}=mg), направленная вниз, уравновешивается силами реакции опор (F_A) и (F_B), направленными вверх. begin{gather*} F_A+F_B=mg end{gather*} По правилу моментов при равновесии begin{gather*} F_Acdot OA=F_Bcdot OB=F_Bcdot 4OARightarrow F_A=4F_B \[7pt] F_A+F_B=5F_B=mgRightarrow F_B=frac{mg}{5} end{gather*} Получаем: begin{gather*} F_B=frac{500cdot 10}{5}=1000 text{Н}=1 text{кН}, F_A=4cdot 100=4000 text{Н}=4 text{кН} end{gather*} Ответ: 4 кН и 1 кН
п.7. Лабораторная работа №9. Проверка условия равновесия рычага
Цель работы
Исследовать условия равновесия рычага под действием двух параллельных сил.
Теоретические сведения
Рычаг – это твёрдое тело, которое может вращаться вокруг неподвижной опоры.
В работе используется рычаг 1-го рода, в котором опора располагается между точками приложения сил.
Плечо силы – это кратчайшее расстояние между точкой опоры и прямой, вдоль которой сила действует на рычаг. Чтобы найти плечо силы, нужно из точки опоры провести перпендикуляр на линию действия силы.
Момент силы – это произведение силы, вращающей тело, на её плечо: (M=Fl).
Правило моментов для двух сил
Рычаг находится в равновесии под действием двух сил, если момент силы, вращающей его по ходу часовой стрелки, равен моменту силы, вращающей его против хода часовой стрелки.
|
begin{gather*} M_1=M_2\[7pt] F_1l_1=F_2l_2 end{gather*} |
В работе используется лабораторный рычаг с отверстиями диаметром 4 мм, находящимися на расстоянии 5 см друг от друга. Отверстий нечетное количество; центральное отверстие (центр тяжести) используется для подвеса рычага на штативе в положении равновесия. Абсолютную погрешность определения плеча на данном рычаге принимаем равной половине диаметра отверстия $$ Delta l=frac D2=2 text{мм} $$
Для измерения веса груза используется динамометр с ценой деления $$ d=0,1 text{Н}. $$
Абсолютная погрешность определения веса $$ Delta_F=frac d2=0,05 text{Н}. $$
Относительные погрешности измерений: $$ delta_l=frac{Delta_l}{l}, delta_F=frac{Delta_F}{F}, delta_M=delta_l+delta_F $$
Абсолютная погрешность определения момента силы $$ Delta_M=Mcdot delta_M $$
Погрешности определения отношений сил и плечей: begin{gather*} r_F=frac{F_1}{F_2}, delta_{rF}=frac{Delta_F}{F_1}+frac{Delta_F}{F_2}, Delta_{rF}=frac{F_1}{F_2}cdot delta_{rF}\[7pt] r_l=frac{l_2}{l_1}, delta_{rF}=delta_{rl}frac{Delta_l}{l_1}+frac{Delta_l}{l_2}, Delta_{rl}=frac{l_2}{l_1}cdot delta_{rl} end{gather*}
Приборы и материалы
Лабораторный рычаг, штатив, стержень, динамометр, набор грузов.
Ход работы
1. Закрепите стержень в штативе, наденьте на него рычаг. Если стержень проходит через центральное отверстие рычага, он находится в равновесии.
2. Подвесьте три груза на динамометре, запишите их вес (F_1).
3. Подвесьте грузы слева от оси вращения рычага на расстоянии 5 см.
4. С помощью динамометра определите, какую силу нужно приложить на расстоянии 15 см справа от оси вращения, чтобы удерживать рычаг в равновесии.
5. Как направлены в этом случае силы, действующие на рычаг? Запишите длину плеч этих сил.
6. Найдите моменты сил (M_1) и (M_2), их относительные и абсолютные погрешности.
7. Вычислите отношение сил (frac{F_1}{F_2}) и плеч (frac{l_2}{l_1}) для этого случая, погрешности их определения.
8. Сделайте выводы.
Результаты измерений и вычислений
| (F_1, text{Н}) | (l_1, text{см}) | (F_2, text{Н}) | (l_2, text{см}) | (F_1/F_2) | (l_2/l_1) |
| 2,9 | 5 | 1,0 | 15 | 2,9 | 3,0 |
Погрешности прямых измерений: $$ Delta_l=2 text{мм}=0,2 text{см}, Delta_F=0,05 text{Н} $$ Найдем моменты сил и погрешности вычислений: begin{gather*} M_1=F_1cdot l_1=2,9cdot 5=14,5 (text{Н}cdot text{м})\[7pt] delta_{M1}=frac{Delta_l}{l_1}+frac{Delta_F}{F_1}=frac{0,2}{5}+frac{0,05}{2,9}approx 0,04+0,017=0,057=5,7text{%} \[7pt] Delta_{M1}=M_1cdot delta_{M1}=14,5cdot 0,057approx 0,8 (text{Н}cdot text{м})\[7pt] M_1=(14,5pm 0,8) text{Н}cdot text{м}\[7pt] \[7pt] M_2=F_2cdot l_2=1,0cdot 15=15,0 (text{Н}cdot text{м})\[7pt] delta_{M2}=frac{Delta_l}{l_2}+frac{Delta_F}{F_2}=frac{0,2}{15}+frac{0,05}{1,0}approx 0,013+0,05=0,063=6,3 text{%} \[7pt] Delta_{M2}=M_2cdot delta_{M2}=15,0cdot 0,063approx 0,9 (text{Н}cdot text{м})\[7pt] M_2=(15,0pm 0,9) text{Н}cdot text{м} end{gather*} Таким образом, с учетом вычисленных погрешностей: $$ M_1=M_2 $$
Погрешность вычислений для (frac{F_1}{F_2}) begin{gather*} delta_{rF}=frac{Delta_F}{F_1}+frac{Delta_F}{F_2}=frac{0,05}{2,9}+frac{0,05}{1,0}approx 0,017+0,05=0,067=6,7text{%}\[7pt] Delta_{rF}=frac{F_1}{F_2}cdot delta_{rF}=2,9cdot 0,067approx 0,2\[7pt] frac{F_1}{F_2}=2,9pm 0,2 end{gather*}
Погрешность вычислений для (frac{l_2}{l_1}) begin{gather*} delta_{rl}=frac{Delta_l}{l_1}+frac{Delta_l}{l_2}=frac{0,2}{5}+frac{0,2}{15}approx 0,04+0,013=0,053=5,3text{%}\[7pt] Delta_{rl}=frac{l_2}{l_1}cdot delta_{rl}=3,0cdot 0,053approx 0,2\[7pt] frac{l_2}{l_1}=3,0pm 0,2 end{gather*} Таким образом, с учетом вычисленных погрешностей: $$ frac{F_2}{F_2}=frac{l_2}{l_1} $$
Выводы
На основании проделанной работы можно сделать следующие выводы.
Моменты сил, приложенных слева и справа от оси вращения рычага, равны $$ M_1=(14,5pm 0,8) text{Н}cdot text{м}, M_2=(15,0pm 0,9) text{Н}cdot text{м} $$ Таким образом, с учетом вычисленных погрешностей, (M_1=M_2) — правило моментов выполняется.
Отношения сил и плечей равны begin{gather*} frac{F_1}{F_2}=2,9pm 0,2, frac{l_2}{l_1}=3,0pm 0,2 end{gather*}
Таким образом, с учетом вычисленных погрешностей (frac{F_1}{F_2}=frac{l_2}{l_1}) — правило отношений выполняется.
Эксперименты подтвердили условие равновесия рычага.
I. Механика
Тестирование онлайн
Плечо силы
Плечо силы — это длина перпендикуляра из некоторой вымышленной точки О к силе. Вымышленный центр, точку О, будем выбирать произвольно, моменты каждой силы определяем относительно этой точки. Нельзя для определения моментов одних сил выбрать одну точку О, а для нахождения моментов других сил выбрать ее в другом месте!
На камень действуют сила тяжести, сила трения, сила реакции опоры, две дополнительные внешние силы F1 и F2

Выбираем точку О в произвольном месте, больше ее местоположение не изменяем. Тогда плечо силы тяжести — это длина перпендикуляра (отрезок d) на рисунке

Плечо силы реакции опоры определяется аналогично

Если перпендикуляр нет возможности построить, то вектор силы продлевается в необходимом направлении, после чего строим перпендикуляр к этой линии. Плечо силы F2

Плечо силы F1

Осталась сила трения! Если точка О и сила лежат на одной линии, то плечо этой силы равно нулю. Плечо силы трения равно нулю.
При решении задач выгодно точку О выбирать в точке пересечения нескольких сил. Тогда плечи всех этих сил будут нулевыми. Например, если точку О в предыдущем примере выбрать иначе, то плечи сил будут иными.

Плечи сил F1, F2 и силы тяжести равны нулю, так как точка О лежит с ними на одной прямой (или на самой силе). Плечо силы реакции опоры — это длина d1. Плечо силы трения — это длина d2.
Момент силы
Это векторная величина, определяется по формуле


Направление вектора момента силы определяется следующим образом. Представляем в какую сторону сила пытается повернуть (тащить) тело относительно точки О, если тело с точкой О закреплены осью. Если по часовой стрелки, то вектор имеет знак «+», если против часовой, тогда знак «-«.

Момент силы реакции опоры отрицательный, так как сила реакции опоры «поворачивает» тело против часовой стрелки

Момент силы тяжести положительный, так как сила тяжести «поворачивает» тело по часовой стрелки
Если точка О выбрана на теле

Момент силы реакции опоры и силы трения положительные, так как силы «поворачивают» тело по часовой стрелки
iSopromat.ru
Моментом силы называют вращательное усилие создаваемое вектором силы относительно твердого тела, оси или точки. 
Размерность — [Н∙м] (Ньютон на метр) либо кратные значения [кН∙м]
Аналогом момента силы является момент пары сил.
Обязательным условием возникновения момента является то, что точка, относительно которой создается момент не должна лежать на линии действия силы.
Определение
Момент определяется как произведение силы F на плечо h:
Плечо силы h, определяется как кратчайшее расстояние от точки до линии действия силы.
Наш короткий видеоурок про момент силы с примерами:
Например, сила величиной 7 кН приложенная на расстоянии 35см от рассматриваемой точки дает момент M=7×0,35=2,45 кНм.
Пример момента силы
Наиболее наглядным примером момента силы может служить поворачивание гайки гаечным ключом.
Гайки заворачиваются вращением, для этого к ним прикладывается момент, но сам момент возникает при воздействии нашей силы на гаечный ключ.
Вы конечно интуитивно понимаете — для того чтобы посильнее закрутить гайку надо взяться за ключ как можно дальше от нее.
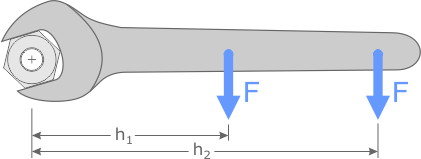
В этом случае, прикладывая ту же силу, мы получаем большую величину момента за счет увеличения её плеча (h2>h1).
Плечом при этом служит расстояние от центра гайки до точки приложения силы.
Плечо момента силы
Рассмотрим порядок определения плеча h момента:
Пусть заданы точка A и некоторая произвольная сила F, линия действия которой не проходит через эту точку. Требуется определить момент силы.
Покажем линию действия силы F (штриховая линия)
Проведем из точки A перпендикуляр h к линии действия силы
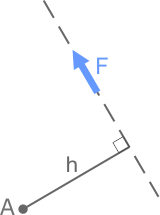
Длина отрезка h есть плечо момента силы F относительно точки A.
Момент принимается положительным, если его вращение происходит против хода часовой стрелки (как на рисунке).
Так принято для того, чтобы совпадали знаки момента и создаваемого им углового перемещения.
Примеры расчета момента силы
Сила расположена перпендикулярно оси стержня
Расстояние между точками A и B — 3 метра.
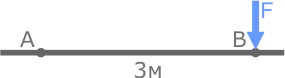
Момент силы относительно точки A:
Сила расположена под углом к оси стержня
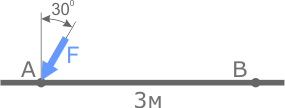
Момент силы относительно точки B:
Известно расстояние от точки до линии действия силы
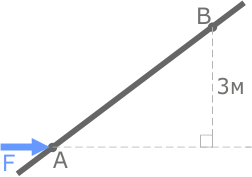
Момент силы относительно точки B:
Уважаемые студенты!
На нашем сайте можно получить помощь по техническим и другим предметам:
✔ Решение задач и контрольных
✔ Выполнение учебных работ
✔ Помощь на экзаменах
Решение задач, контрольных и РГР
Стоимость мы сообщим в течение 5 минут
на указанный вами адрес электронной почты.
Если стоимость устроит вы сможете оформить заказ.
Набор студента для учёбы
— Рамки A4 для учебных работ
— Миллиметровки разного цвета
— Шрифты чертежные ГОСТ
— Листы в клетку и в линейку
Момент силы
О чем эта статья:
Статья находится на проверке у методистов Skysmart.
Если вы заметили ошибку, сообщите об этом в онлайн-чат
(в правом нижнем углу экрана).
Сила: что это за величина
В повседневной жизни мы часто встречаем, как любое тело деформируется (меняет форму или размер), ускоряется или тормозит, падает. В общем, чего только с разными телами в реальной жизни не происходит. Причиной любого действия или взаимодействия является сила.
- Сила — это физическая векторная величина, которая воздействует на данное тело со стороны других тел.
Она измеряется в Ньютонах — это единица измерения названа в честь Исаака Ньютона.
Сила — величина векторная. Это значит, что, помимо модуля, у нее есть направление. От того, куда направлена сила, зависит результат.
Вот стоите вы на лонгборде: можете оттолкнуться вправо, а можете влево — в зависимости от того, в какую сторону оттолкнетесь, результат будет разный. В данном случае результат выражается в направлении движения.
Плечо силы
Для начала давайте разберемся, что такое плечо силы — оно нам сегодня очень пригодится.
Представьте человека. Совершенно обычного. Если он совершенно обычный, у него точно будут плечи — без них получится уже какой-то инопланетянин. Если мы прочертим прямую вдоль линии плеча, а потом еще одну — вдоль линии руки — мы получим две пересекающиеся прямые. Угол между такими прямыми будет равен 90 градусов, а значит эти линии перпендикулярны.
Как анатомическое плечо перпендикулярно руке, так и в физике плечо перпендикулярно, только уже линии действия силы.
То есть перпендикуляр, проведенный от точки опоры до линии действия силы —это плечо силы.
Попробуйте курсы подготовки к ЕГЭ по физике с опытным преподавателем в онлайн-школе Skysmart!
Рычаг
В каждом дворе есть качели, для которых нужны два качающихся (если в вашем дворе таких нет, посмотрите в соседнем). Большая доска ставится посередине на точку опоры. По сути своей, качели — это рычаг.
Рычаг — простейший механизм, представляющий собой балку, вращающуюся вокруг точки опоры.
Хорошо, теперь давайте найдем плечо этой конструкции. Возьмем правую часть качелей. На качели действует сила тяжести правого качающегося, проведем перпендикуляр от линии действия силы до точки опоры. Получилась, что плечо совпадает с рычагом, разве что рычаг — это вся конструкция, а плечо — половина.
Давайте попробуем опустить качели справа, тогда что получим: рычаг остался тем же самым по длине, но вот сместился на некоторый угол, а вот плечо осталось на том же месте. Если направление действия силы не меняется, как и точка опоры, то перпендикуляр между ними невозможно изменить.
Момент силы
При решении задач на различные силы нам обычно хватало просто сил. Сила действует всегда линейно (ну в худшем случае под углом), поэтому очень удобно пользоваться законами Ньютона, приравнивать разные силы. Это работало с материальными точками, но не будет так просто применяться к телам, у которых есть форма и размер.
Вот мы приложили силу к краю палки, но при этом не можем сказать, что на другом ее конце будут то же самое ускорение и та же самая сила. Для этого мы вводим такое понятие, как момент силы.
Момент силы — это векторное произведение силы на плечо. Для определения физического смысла можно сказать, что момент — это вращательное действие.
Момент силы
M = Fl
M — момент силы [Н*м]
F — сила [Н]
l — плечо [м]
Вернемся к примеру с дверями. Вот мы приложили силу к краю двери — туда, где самый длинный рычаг. Получаем некоторое значение момента силы.
Теперь ту же силу приложим ближе к креплению двери, там, где плечо намного короче. По формуле получим момент меньшей величины.
На себе мы это ощущаем таким образом: нам легче толкать дверь там, где момент больше. То есть, чем больше момент, тем легче идет вращение.
То же самое можно сказать про гаечный ключ. Чтобы закрутить гайку, нужно взяться за ручку дальше гайки.
В этом случае, прикладывая ту же силу, мы получаем большую величину момента за счет увеличения плеча.
Расчет момента силы
Сейчас рассмотрим несколько вариантов того, как момент может рассчитываться. По идее просто нужно умножить силу на плечо, но поскольку мы имеем дело с векторами, все не так просто.
Если сила расположена перпендикулярно оси стержня, мы просто умножаем модуль силы на плечо.
Расстояние между точками A и B — 3 метра.
Момент силы относительно точки A:
Если сила расположена под углом к оси стержня, умножаем проекцию силы на плечо.
Обратите внимание, что такие задания могут встретиться только у учеников не раньше 9 класса!
Момент силы относительно точки B:
Если известно расстояние от точки до линии действия силы, момент рассчитывается как произведение силы на это расстояние (плечо).
Момент силы относительно точки B:
Правило моментов
Вернемся к нашим баранам качелям. Мы умудряемся на них качаться, потому что существует вращательное действие — момент. Силы, с которыми мы действуем на разные стороны этих качелей могут быть разными, но вот моменты должны быть одинаковыми.
Правило моментов говорит о том, что если рычаг не вращается, то сумма моментов сил, поворачивающих рычаг против часовой стрелки, равна сумме моментов сил, поворачивающих рычаг по часовой стрелке.
Это условие выполняется относительно любой точки.
Правило моментов
M1 + M2 +. + Mn = M’1 + M’2 +. + M’n
M1 + M2 +. + Mn — сумма моментов сил, поворачивающих рычаг по часовой стрелке [Н*м]
Давайте рассмотрим этот закон на примере задач.
Задача 1
К левому концу невесомого стержня прикреплен груз массой 3 кг.
Стержень расположили на опоре, отстоящей от его левого конца на 0,2 длины стержня. Чему равна масса груза, который надо подвесить к правому концу стержня, чтобы он находился в равновесии?
Решение:
Одним из условий равновесия стержня является то, что полный момент всех внешних сил относительно любой точки равен нулю. Рассмотрим моменты сил относительно точки опоры. Момент, создаваемый левым грузом равен mgL5 он вращает стержень против часовой стрелки. Момент, создаваемый правым грузом:Mg4L5 — он вращает по часовой.
Приравнивая моменты, получаем, что для равновесия к правому концу стержня необходимо подвесить груз массой
M = m : 4 = 3 : 4 = 0,75 кг
Ответ: для равновесия к правому концу стержня необходимо подвесить груз массой 0,75 кг
Задача 2
Путешественник несёт мешок с вещами на лёгкой палке. Чтобы удержать в равновесии груз весом 80 Н, он прикладывает к концу B палки вертикальную силу 30 Н. OB = 80 см. Чему равно OA?
Решение:
По правилу рычага: FB/FA=|OA|/|OB| где FA и FB — силы, приложенные соответственно к точкам A и B. Выразим длину OA:
Ответ: расстояние ОА равно 30 см
Задача 3
Тело массой 0,2 кг подвешено к правому плечу невесомого рычага (см. рисунок). Груз какой массы надо подвесить ко второму делению левого плеча рычага для достижения равновесия?
Решение:
По правилу рычага m1g*l1=m2g*l2
Отсюда m2=l1/l2*m1=3/2*0,2 = 0,3 кг
Ответ: Масса груза равна 0,3 кг
Задача 4
На железной дороге для натяжения проводов используется показанная на рисунке система, состоящая из легких блоков и тросов, натягиваемых тяжелым грузом. Чему равна сила натяжения провода?
Решение:
Система на рисунке состоит из трех блоков: двух подвижных и одного неподвижного. Назначение неподвижного блока заключается только в том, что он меняет направление действия силы, однако никакого выигрыша в силе при этом не возникает. Каждый подвижный блок, напротив, дает выигрыш в силе.
Определим силу, с которой натянута первая нить. Груз растягивает ее с силой:
T = mg = 10*10 = 100 Н
Рассмотрим теперь первый подвижный блок. Так как вся система статична, полная сила, действующая на этот блок, должна быть равна нулю. Первая нить тянет его направо с суммарной силой 2T, значит, натяжение второй нити тоже должно быть равно 2T (вот он — выигрыш в силе). Аналогичное рассмотрение для второго подвижного блока показывает, что натяжение провода должно быть равно
Ответ: натяжение провода равно 400 Н
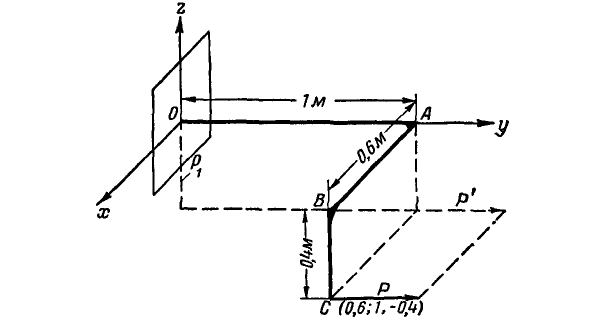
Задача 5 — a.k.a самая сложная задачка
Под действием силы тяжести mg груза и силы F рычаг, представленный на рисунке, находится в равновесии. Вектор силы F перпендикулярен рычагу, груз на плоскость не давит. Расстояния между точками приложения сил и точкой опоры, а также проекции этих расстояний на вертикальную и горизонтальную оси указаны на рисунке.
Если модуль силы F равен 120 Н, то каков модуль силы тяжести, действующей на груз?
Решение:
Одним из условий равновесия рычага является то, что полный момент всех внешних сил относительно любой точки равен нулю. Рассмотрим моменты сил относительно опоры рычага. Момент, создаваемый силой F, равен F*5 м и он вращает рычаг по часовой стрелке. Момент, создаваемый грузом относительно этой точки — mg*0,8 м, он вращает против часовой. Приравнивая моменты, получаем выражение для модуля силы тяжести
Ответ: модуль силы тяжести, действующей на груз равен 750 Н
Момент силы относительно точки и относительно оси в теоретической механике
Содержание:
Момент силы относительно точки и относительно оси:
Пусть дана сила Р, направленная как угодно в пространстве, и произвольная точка О (рис. 100).
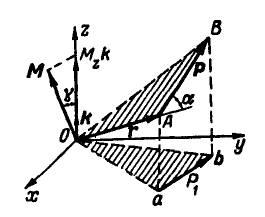
Опустим из точки О перпендикуляр на силу Р (на чертеже перпендикуляр не показан) и обозначим плечо силы Р относительно точки О через р. Тогда моментом силы Р относительно точки О (или линейным моментом силы) Называется вектор М, численно равный произведению Р на плечо р и отложенный от точки О перпендикулярно плоскости, проходящей через Р и О в такую сторону, чтобы, смотря с конца стрелки вектора М, сила Р вращала плоскость ОАВ вокруг точки О против часовой стрелки.
Если из центра моментов О провести радиус-вектор 

Из сказанного следует, что, линейный момент силы может быть представлен, как векторное произведение радиуса-вектора на силу Р, т. е.:

где  — единичный вектор направления М.
— единичный вектор направления М.
Наряду с линейным моментом силы введем в рассмотрение еще одно важное понятие момента силы относительно оси.
Пусть требуется найти момент силы Р относительно какой-либо оси, например z (рис. 100). Для этого силу Р спроектируем на любую плоскость, перпендикулярную к оси z, например на координатную плоскость хОу; обозначим эту проекцию через  . Затем из точки О пересечения оси z с плоскостью хОу опускаем перпендикуляр
. Затем из точки О пересечения оси z с плоскостью хОу опускаем перпендикуляр  на направление найденной проекции
на направление найденной проекции  силы Р. Тогда произведение
силы Р. Тогда произведение  , взятое со знаком
, взятое со знаком  или
или  , и будет искомым моментом силы Р относительно оси z, т. е:
, и будет искомым моментом силы Р относительно оси z, т. е:

где знак  берется, если, смотря с положительного направления оси z, проекция силы Р представляется вращающей плоскость хОу вокруг оси z против часовой стрелки, и знак минус, если по часовой стрелке. В нашем случае (рис. 100) в правой части равенства (41) следует взять знак плюс.
берется, если, смотря с положительного направления оси z, проекция силы Р представляется вращающей плоскость хОу вокруг оси z против часовой стрелки, и знак минус, если по часовой стрелке. В нашем случае (рис. 100) в правой части равенства (41) следует взять знак плюс.
Следует заметить, что момент силы относительно оси обращается в нуль, когда сила параллельна оси или пересекает ось, т. е. когда вообще сила и ось расположены в одной плоскости.
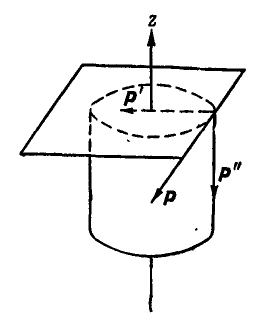
С понятием момента силы относительно оси часто придется встречаться в дальнейшем. Если представить себе цилиндр (рис. 101), который может вращаться вокруг неподвижной оси z, то сила Р, действующая на цилиндр, не будет его вращать в двух случаях: когда она пересекает ось z (положение  ) и когда она параллельна оси (положение
) и когда она параллельна оси (положение  ), т. е. когда сила Р и ось z лежат в одной плоскости и, следовательно, момент силы Р относительно оси z обращается в нуль.
), т. е. когда сила Р и ось z лежат в одной плоскости и, следовательно, момент силы Р относительно оси z обращается в нуль.
Найдем зависимость между моментом силы Р относительно оси, например z (рис. 100), и моментом силы Р относительно точки О, взятой на этой оси.
Обозначим линейный момент силы через М, а момент силы относительно оси z представим в виде вектора  , отложенного от точки О в положительном направлении оси z. Обозначим угол между М и
, отложенного от точки О в положительном направлении оси z. Обозначим угол между М и  через
через  . Из рисунка 100 видно, что
. Из рисунка 100 видно, что  представляет собой проекцию
представляет собой проекцию  на плоскость хОу, а поэтому, по известной теореме геометрии, имеем:
на плоскость хОу, а поэтому, по известной теореме геометрии, имеем:

где — угол между плоскостями треугольников, или, что то же, — между векторами М и  .
.
Умножив обе части последнего равенства на 2, получим:

Тогда на основании равенств (40) и (41) будем иметь:

Из равенства (42) следует, что проекции линейного момента силы  на координатные оси х, у и z представляют собой момент силы Р относительно осей х, у и z.
на координатные оси х, у и z представляют собой момент силы Р относительно осей х, у и z.
Линейный момент М может быть выражен по формуле (4) через компоненты:

Величины  можно определить, пользуясь равенствами (42) и (5) или (40а) и (11):
можно определить, пользуясь равенствами (42) и (5) или (40а) и (11):

где  — проекции радиуса вектора
— проекции радиуса вектора  на координатные оси, или, что все равно, координаты точки приложения силы;
на координатные оси, или, что все равно, координаты точки приложения силы;
 — проекции силы Р на координатные оси;
— проекции силы Р на координатные оси;
 — углы, которые образует вектор М с координатными осями.
— углы, которые образует вектор М с координатными осями.
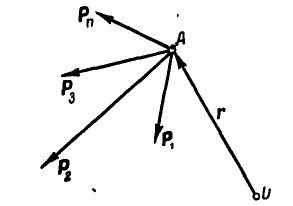
Если на точку А (рис. 102) действуют силы  — их равнодействующая, то
— их равнодействующая, то

Умножая векторно обе части равенства на радиус-вектор  , проведенный из любой точки О в точку приложения сил А, имеем:
, проведенный из любой точки О в точку приложения сил А, имеем:

или 
т. е. момент равнодействующей сил, линии действия которых пересекаются в точке, относительно любой точки равен геометрической сумме моментов сил составляющих относительно той же точки.
Проектируя векторное равенство (45) на координатные оси, согласно (42) получаем:
т. е. момент равнодействующей сил, линии действия которых пересекаются в одной точке, относительно какой-либо оси равен алгебраической сумме моментов сил составляющих относительной той же оси.
На основании последних равенств формулы (44) могут быть получены непосредственно из чертежа. Для этого представим силу Р (рис. 103), приложенную в точке А, определяемой координатами х, у и z в виде трех составляющих 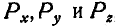 , параллельных координатным осям. Тогда на основании равенств (46) моменты
, параллельных координатным осям. Тогда на основании равенств (46) моменты  силы Р относительно координатных осей найдутся непосредственно из чертежа:
силы Р относительно координатных осей найдутся непосредственно из чертежа:

Задача:
Найти моменты  и
и  силы
силы  относительно осей х, у и z (рис. 104), если сила Р параллельна оси Оу и OA совпадает с
относительно осей х, у и z (рис. 104), если сила Р параллельна оси Оу и OA совпадает с 
Решение. Момент силы Р относительно оси у равен нулю, так как сила Р параллельна оси Оу, т. е.  .
.
Для нахождения момента силы Р относительно оси Ох проектируем силу Р на плоскость yOz, перпендикулярную к оси Ох (проекция Р). Опустив далее из точки О пересечения оси Ох с плоскостью yOz перпендикуляр  на направление проекции
на направление проекции  , имеем:
, имеем:

Аналогично находим, что  . Моменты
. Моменты  и
и  силы Р относительно осей х, у и z можно было бы найти также по формулам (44):
силы Р относительно осей х, у и z можно было бы найти также по формулам (44):

Задача:
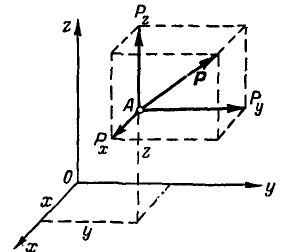
Найти линейный момент М силы  относительно точки О, если сила Р направлена по диагонали куба (рис. 106) и
относительно точки О, если сила Р направлена по диагонали куба (рис. 106) и  и
и 
Решение. Проекции силы Р на координатные оси будут:
Так как точка приложения силы  нам известна, то проекции линейного момента М на координатные оси найдутся по формулам (44):
нам известна, то проекции линейного момента М на координатные оси найдутся по формулам (44):

откуда по формуле (43) находим:

Момент силы относительно точки
Для равновесия рычага необходимо и достаточно, чтобы сумма моментов действующих на него сил относительно точки опоры равнялась нулю
Условие равновесия рычага. Твердое тело, имеющее возможность поворачиваться вокруг неподвижной оси под воздействием сил, линии действия которых расположены в плоскостях, перпендикулярных оси вращения, называют рычагом. Пусть рычаг (рис. 27) представляет собой невесомый жесткий стержень. На него действуют только две силы  и
и  , перпендикулярные к рычагу в точках А и В.
, перпендикулярные к рычагу в точках А и В.
Если точка опоры С, т. е. точка пересечения оси вращения с плоскостью чертежа, лежит между линиями действия сил (рис. 27, а), то рычаг называют рычагом первого рода. Рычагом второго рода называют рычаг, в котором точка опоры находится по одну сторону от линий действия сил (рис. 27, б).
Для равновесия рычага необходимо и достаточно, чтобы равнодействующая активных сил и была уравновешена реакцией в точке опоры. Таким образом, равнодействующая сил и должна проходить через точку С, т. е. должно существовать равенство


Будем называть расстояние от точки опоры до линии действия силы плечом силы, а произведение модуля силы на плечо—моментом силы относительно точки опоры С. Момент .мы считаем положительным, если сила стремится повернуть рычаг против вращения стрелок часов, и отрицательным, если сила стремится повернуть плечо в ту же сторону, в какую поворачиваются стрелки часов. Момент силы относительно опоры на левом чертеже положительный, а момент силы — отрицательный.
Таким образом, условие равновесия рычага выразим так: для равновесия рычага необходимо и достатнчно, чтобы сумма моментов сил относительно точки опоры равнялась нулю:
 (13)
(13)
Задача:
Груз G (рис. 28, а) поднимают тросом, перекинутым через блок и намотанным на барабан l лебедки. Барабан лебедки жестко скреплен с зубчатым колесом ll, которое находится в зацеплении с зубчатым колесом lll, жестко скрепленным с рукояткой O3A. Определить силу F, прикладываемую к точке А рукоятки лебедки для равномерного поднятия груза G, в положении, изображенном на чертеже. Даны диаметры: D1, D2, D3. Длина рукоятки O3A=l.
Решение. Лебедку можно рассматривать как состоящую из двух рычагов. Один рычаг (назовем его первым) представляет собой твердое тело, состоящее из барабана l и шестерни ll и имеющее неподвижную ось O1. Другой рычаг—твердое тело, состоящее из шестерни lll и рукоятки O3A и имеющее неподвижную ось O3. Для решения задачи из условия равновесия первого рычага определим давление P3,2 между зубцами шестерен, а зная его, найдем F из условия равновесия второго рычага.
На первый рычаг действуют следующие силы (рис. 28, б): 1) сила натяжения троса, равная весу груза, направленная вверх и стремящаяся повернуть рычаг по ходу часовой стрелки; 2) давление P3,2 зубцов колеса lll на зубцы колеса ll, направленное вверх и поворачивающее первый рычаг против хода часов, и 3) реакция в оси O1.
Момент силы T относительно точки опоры O1 равен —  . Момент силы P3,2 равен
. Момент силы P3,2 равен  . Момент реакции в оси относительно точки O1 равен нулю. Из условия равновесия рычага находим
. Момент реакции в оси относительно точки O1 равен нулю. Из условия равновесия рычага находим

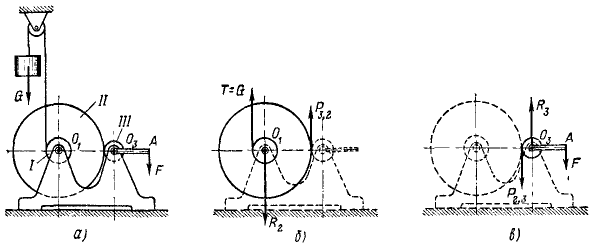
Рис. 28
Ко второму рычагу (рис. 28, в) приложены: I) сила давления зубцов колеса II, равная (по принципу равенства действия и противодействия) P3,2, но направленная вниз и стремящаяся повернуть второй рычаг против хода часов; 2) давление F руки человека, направленное вниз и поворачивающее рычаг по ходу часов, и 3) реакция в оси O3, момент которой относительно O3 равен нулю.
Момент силы P3,2 относительно точки опоры O3 равен  . Момент искомой силы F равен —F∙l. Пo условию равновесия рычага
. Момент искомой силы F равен —F∙l. Пo условию равновесия рычага

Мы выясни ли, что момент силы относительно точки опоры рычага зависит не только от величины силы, но и от ее положения по отношению к точке опоры рычага. Чем дальше от точки опоры лежит линия действия силы, тем больше момент. Если сила не перпендикулярна рычагу (рис. 29), то способность ее поворачивать рычаг вокруг точки опоры мы и в этом случае будем измерять моментом силы, а под плечом будем понимать кратчайшее расстояние от точки опоры до линии действия силы. Пусть сила F приложена к рычагу в точке А и составляет с ним некоторый угол а. Разложим силу на две составляющие, из которых одна (F sin a) перпендикулярна к рычагу, а другая (F cos a) направлена вдоль рычага. Эта вторая составляющая не может повернуть рычаг, а поворачивать его будет только первая составляющая (F sin a) или, как говорят, только эта составляющая создает вращающий момент.
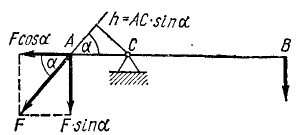
Рис. 29
Следовательно, момент силы F относительно опоры C

Но, как видно из чертежа, АC sin a= h. Называя плечом силы относительно точки длину перпендикуляра, опущенного из точки на линию действия силы, мы находим, что и в этом случае момент равен произведению модуля силы на плечо:
 (14)
(14)
Момент силы относительно точки выражается произведением модуля силы на плечо, взятым со знаком плюс или минус
Момент силы относительно точки. Понятие момента применимо не только к силам, действующим на рычаг, но и к силам, приложенным ко всякому твердому телу. Момент силы может быть определен не только относительно опоры, но и относительно всякой точки. Точку, относительно которой определен момент силы, называют центром момента.
Таким образом, опуская из точки О перпендикуляр на линию действия силы  и умножая модуль силы на длину этого перпендикуляра, получим момент силы F относительно точки О. Знак момента будем определять, руководствуясь следующим правилом: если мысленно, закрепив центр момента и действуя на плечо в направлении силы, будем поворачивать плечо против хода часовой стрелки, то момент силы относительно данного центра положителен, если же по ходу часовой стрелки, то ‘.момент отрицателен.
и умножая модуль силы на длину этого перпендикуляра, получим момент силы F относительно точки О. Знак момента будем определять, руководствуясь следующим правилом: если мысленно, закрепив центр момента и действуя на плечо в направлении силы, будем поворачивать плечо против хода часовой стрелки, то момент силы относительно данного центра положителен, если же по ходу часовой стрелки, то ‘.момент отрицателен.
Так (рис. 30), моменты сил  ,
,  и
и  относительно точки О положительны, а моменты сил
относительно точки О положительны, а моменты сил  и
и  относительно той же точки отрицательны.
относительно той же точки отрицательны.
Одна и та же сила может иметь положительный момент относительно одной точки и отрицательный —относительно другой. Так, момент силы (рис. 31) относительно точки О положителен, а относительно точки C отрицателен.
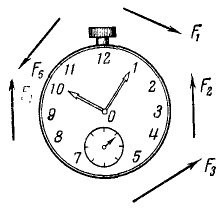
Рис. 30
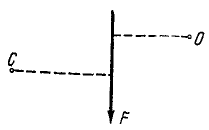
Рис. 31
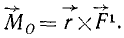
Момент силы относительно начала координат связан с проекциями X и Y силы на оси и с координатами х и у точки ее приложения соотношением M0=xY-yX.
Аналитическое выражение момента силы.
Пусть дана сила (рис. 32), направление которой составляет с осями координат углы αF и βF. Направляющие косинусы этой силы
 ;
;
 .
.
Проведем вектор  из начала координат в точку приложения силы. Этот вектор называют радиусом-вектором. Если координаты точки приложения силы обозначить через х и у, то, как видно из чертежа,
из начала координат в точку приложения силы. Этот вектор называют радиусом-вектором. Если координаты точки приложения силы обозначить через х и у, то, как видно из чертежа,
 ;
;
 .
.
Плечо силы h относительно точки О определим из △OAN:
h = r sin δ.
И для определения величины момента силы получаем следующую формулу:
M0= r Fsin δ. (15)
Угол δ как внутренний угол ΔOAK равен внешнему aF без другого внутреннего, с ним не смежного—ar, поэтому
Подставляя сюда, а затем в (15) найденные выше значения тригонометрических величин, получим 
M0= хY — yX 1 . (16)
Определяя момент силы по формуле (16), нет надобности определять его знак, сообразуясь с ходом часовой стрелки, т. к. знак получается непосредственно из формулы в зависимости от знаков χ, y, X, Y. В нашем курсе формуле (16) уделена значительная роль.
Момент силы относительно точки выражается векторным произведением радиуса-вектора точки приложения силы на вектор силы: 
Момент силы относительно точки как вектор
Напомним, что векторным произведением  на
на  называют вектор
называют вектор  направленный перпендикулярно к a и b согласно «правилу буравчика», а по модулю равный произведению модулей a и b на синус угла между направлениями этих векторов.
направленный перпендикулярно к a и b согласно «правилу буравчика», а по модулю равный произведению модулей a и b на синус угла между направлениями этих векторов.
Следовательно, как видно из (15), величина момента силы равна модулю векторного произведения радиуса-вектора  на вектор силы
на вектор силы  Момент силы относительно точки О как вектор можно представить:
Момент силы относительно точки О как вектор можно представить:
 (17)
(17)
Вектор  не изображен на рис. 32, потому что он направлен перпендикулярно к плоскости, в которой лежат векторы и , т. е. в данном случае перпендикулярно плоскости чертежа. Если же изобразить силу не в плоскости чертежа, а в трехмерном пространстве, то момент силы относительно точки О надо отложить от точки О перпендикулярно к плоскости, составляемой радиусом-вектором и вектором силы. Удобна следующая геометрическая интерпретация (рис. 33). Обозначив буквами А и В начало и конец вектора силы, получим треугольник OAB, площадь которого равна половине произведения основания AB на высоту h = OA sin δ.
не изображен на рис. 32, потому что он направлен перпендикулярно к плоскости, в которой лежат векторы и , т. е. в данном случае перпендикулярно плоскости чертежа. Если же изобразить силу не в плоскости чертежа, а в трехмерном пространстве, то момент силы относительно точки О надо отложить от точки О перпендикулярно к плоскости, составляемой радиусом-вектором и вектором силы. Удобна следующая геометрическая интерпретация (рис. 33). Обозначив буквами А и В начало и конец вектора силы, получим треугольник OAB, площадь которого равна половине произведения основания AB на высоту h = OA sin δ.
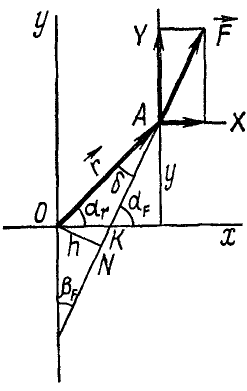
Рис. 32
Рис. 33
Сравнивая это равенство с (14), найдем, что момент силы  относительно точки О численно равен удвоенной площади треугольника OAB. Напомним, что отрезок AB выражен в единицах силы, а потому площадь треугольника OAB выражается не в единицах площади, а в единицах момента силы (ед. силы × ед. длины):
относительно точки О численно равен удвоенной площади треугольника OAB. Напомним, что отрезок AB выражен в единицах силы, а потому площадь треугольника OAB выражается не в единицах площади, а в единицах момента силы (ед. силы × ед. длины):
M0 = 2 пл. ΔOAB 1
Вектор момента направлен от точки О перпендикулярно к плоскости OAB в такую сторону, с которой вектор силы AB представляется поворачивающим треугольник OAB вокруг точки О против хода часов. По модулю он равен (в некотором выбранном масштабе) удвоенной площади треугольника OAB.
Если вектор силы AB переместить вдоль линии действия силы в пределах абсолютно твердого тела, к которому сила AB приложена, оставив точку О неизменной, то вектор момента не изменится, так как не изменятся плоскость и площадь треугольника OAB. Сила является вектором скользящим, и действие силы, а следовательно, и ее момент не изменяются при перенесении силы вдоль линии действия. Напротив, если мы переменим точку О, то положение и площадь треугольника OAB, вообще говоря, изменятся, а следовательно, изменится и момент силы. Поэтому момент силы относительно какой-либо точки О является вектором прикрепленным, он приложен к точке О и переносить его в какое-либо другое место тела нельзя.
Выражение момента силы относительно точки в виде вектора вполне соответствует физической сущности этого понятия, и если силы расположены в различных плоскостях, то моменты сил относительно точки складывают по правилу параллелограмма. Только при рассмотрении системы сил, расположенных в одной плоскости, можно игнорировать направление вектора момента, а учитывать его величину и знак, т. е. определять момент по формулам (14), (15) или (16). В такой системе, когда все силы и центр моментов расположены в одной плоскости, векторы моментов различных сил относительно какой-либо точки О направлены от точки О перпендикулярно к этой плоскости в ту или другую сторону, и в этом случае их складывают алгебраически.
Момент равнодействующей равен сумме моментов составляющих
Теорема Вариньона
Пусть даны пространственный пучок сил  ,
,  , .
, .  (рис. 34) и равнодействующая
(рис. 34) и равнодействующая  этого пучка. Возьмем где-либо совершенно произвольно точку О, проведем радиус вектор
этого пучка. Возьмем где-либо совершенно произвольно точку О, проведем радиус вектор  из точки О в точку приложения сил пучка, определим момент каждой силы относительно точки О и сложим эти моменты:
из точки О в точку приложения сил пучка, определим момент каждой силы относительно точки О и сложим эти моменты:


Заменяя согласно (1) геометрическую сумму всех сил сходящейся системы их равнодействующей, получим
 (18)
(18)
Словами это равенство можно прочитать так: момент равнодействующей системы сходящихся сил относительно какой-либо точки равен сумме моментов всех сил относительно той же точки. Момент
силы относительно точки есть вектор, поэтому сумма является геометрической. В частном случае, если все силы и центр моментов лежат в одной плоскости, то все векторы моментов направлены по одной прямой, перпендикулярной к этой плоскости, и геометрическое сложение моментов сил заменяется алгебраическим.
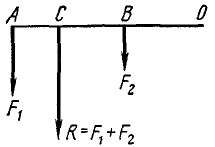
Рис. 35
Таким образом, момент равнодействующей плоской системы сходящихся сил равен алгебраической сумме моментов составляющих. Теорема Вариньона о моменте равнодействующей справедлива не только для пучка сил, ио для всякой системы сил, имеющей равнодействующую. Так, например, момент равнодействующей R двух параллельных сил F1 и F2 относительно произвольной точки О (рис. 35) равен:
что и требовалось доказать. Методом от n к n+1 нетрудно показать справедливость теоремы Вариньона для любого числа сил.
Момент силы относительно оси
Чтобы определить момент силы относительно оси, нужно спроецировать силу на плоскость, перпендикулярную к оси, и затем определить момент проекции силы относительно точки пересечения оси и плоскости
Момент силы относительно оси. Ознакомление с понятием момента силы относительно оси, имеющим большое значение, начнем с конкретного примера. Дверь (рис. 36) может поворачиваться вокруг оси. Механическое воздействие силы  , поворачивающей дверь, зависит не только от величины, но и от положения вектора силы по отношению к оси. Разложим силу
, поворачивающей дверь, зависит не только от величины, но и от положения вектора силы по отношению к оси. Разложим силу  на две составляющие, из которых одну
на две составляющие, из которых одну  направим параллельно осн, а другую (
направим параллельно осн, а другую ( ) расположим в плоскости, перпендикулярной к оси. Очевидно, что составляющая, параллельная оси, поворачивать дверь не будет, действие же составляющей, расположенной в плоскости, перпендикулярной к оси, зависит не только от ее величины Р, но и от кратчайшего расстояния между линией действия этой составляющей и осью. Иначе говоря, действие силы на закрепленную на оси дверь характеризуется моментом составляющей (расположенной в плоскости, перпендикулярной к оси) относительно точки пересечения оси и плоскости.
) расположим в плоскости, перпендикулярной к оси. Очевидно, что составляющая, параллельная оси, поворачивать дверь не будет, действие же составляющей, расположенной в плоскости, перпендикулярной к оси, зависит не только от ее величины Р, но и от кратчайшего расстояния между линией действия этой составляющей и осью. Иначе говоря, действие силы на закрепленную на оси дверь характеризуется моментом составляющей (расположенной в плоскости, перпендикулярной к оси) относительно точки пересечения оси и плоскости.
Установим теперь общее правило определения момента силы относительно оси.
Чтобы определить момент силы относительно оси, нужно эту силу спроецировать на перпендикулярную к оси плоскость и определить момент проекции силы относительно точки пересечения оси и плоскости. Момент силы относительно оси — скалярная величина, потому что у него нет собственного направления, а «направлен» он по оси в ту или иную сторону, т. е. определяется величиной и знаком и, конечно, направлением оси.
Где именно проведена перпендикулярная к оси плоскость, не имеет значения, так как проекции силы на параллельные плоскости и плечи проекций силы во всех случаях одни и те же.
Если сила параллельна оси или пересекает ось, то момент силы относительно оси равен нулю. Эти два случая можно объединить в один: момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
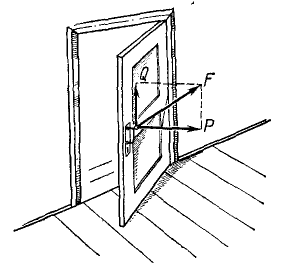
Рис. 36
Момент силы относительно оси равен проекции на эту ось момента силы относительно какой-либо точки, взятой на оси
Покажем, что момент силы относительно оси равен проекции на данную ось вектора момента силы относительно какой-либо точки той же оси.
Возьмем на оси zz’ произвольную точку О (рис. 37) и определим момент силы  относительно этой точки. Момент
относительно этой точки. Момент  силы
силы  относительно точки О выражается вектором, по модулю равным удвоенной площади треугольника OAB и приложенным в точке О перпендикулярно к плоскости Δ OAB.
относительно точки О выражается вектором, по модулю равным удвоенной площади треугольника OAB и приложенным в точке О перпендикулярно к плоскости Δ OAB.
Проведем через точку О плоскость, перпендикулярную к оси. Чтобы определить момент Mz силы относительно оси, спроецируем силу на эту плоскость и определим момент проекции  относительно точки пересечения оси и плоскости, т. е. относительно точки О. Этот момент численно равен удвоенной площади треугольника Oab и направлен перпендикулярно к Oab, т. е. по оси zz’.
относительно точки пересечения оси и плоскости, т. е. относительно точки О. Этот момент численно равен удвоенной площади треугольника Oab и направлен перпендикулярно к Oab, т. е. по оси zz’.
Но Δ Oab является проекцией Δ OAB на плоскость, перпендикулярную к оси. Площадь проекции равна площади проецируемой фигуры, умноженной на косинус двугранного угла между плоскостями, измеряемого линейным углом между перпендикулярами к этим плоскостям, т. е. 
Спроецировав на ось момент силы относительно точки О и принимая во внимание это равенство, найдем, что численно
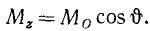 (19)
(19)
При решении задач особенно часто приходится определять моменты сил относительно координатных осей. Согласно только что доказанному момент силы относительно какой-либо из осей координат равен проекции на эту ось момента сил относительно любой точки этой оси, в частности относительно точки О начала координат:
 (20)
(20)
где cosaM, cosβM и CosγM-направляющие косинусы вектора момента силы относительно начала координат.
Если момент относительно оси умножим на единичный вектор этой оси, то получим не проекцию, а составляющую момента относительно точки, не скалярную, а векторную величину:
 (21)
(21)
Из равенств (20) и (21) непосредственно получаем
 (22)
(22)
 (22 / )
(22 / )
Аналитические выражения моментов силы относительно осей координат. Выразим моменты силы относительно осей координат через координаты точки приложения силы и проекции силы на координатные оси.
На чертеже (рис. 38) изображены оси координат и составляющие силы, приложенной к точке А (xyz) (сама сила на чертеже не показана). Чтобы определить моменты силы относительно оси Ох, нужно сначала спроецировать силу  на плоскость yОz. Проекция равнодействующей равна сумме проекций составляющих, и вместо того, чтобы спроецировать силу
на плоскость yОz. Проекция равнодействующей равна сумме проекций составляющих, и вместо того, чтобы спроецировать силу  , мы можем спроецировать ее составляющие. Проекция составляющей
, мы можем спроецировать ее составляющие. Проекция составляющей  равна нулю, проекции же составляющих
равна нулю, проекции же составляющих  и
и  равны этим составляющим.
равны этим составляющим.
Теперь нам остается определить алгебраическую сумму моментов этих проекций относительно точки О, которая по теореме Вариньона равна моменту проекции равнодействующей на плоскость yОz, или, что то же, моменту силы относительно оси Ох. Так мы получаем первую из формул (23). Аналогично можно доказать две другие формулы (23), выражающие моменты силы относительно осей Oy и Oz:
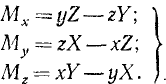 (23)
(23)
Для вывода формул (23) мы выбрали точку приложения силы в первом октанте (х, у и z положительны) и направили силу от начала координат (X, Y и Z положительны). Если координаты или проекции силы отрицательны, то в формулы (23) надо, конечно, подставить отрицательные значения.
Достаточно запомнить одну из формул (23), а следующую можно получить из предыдущей, применив круговую подстановку, т. е. заменив всюду икс на игрек, игрек на зет и зет на икс. Случаи, когда формулы можно получить одну из другой такой подстановкой, мы будем отмечать символом: 
Выражение (23) можно получить непосредственно из свойств векторного произведения, если представить векторное произведение определителем третьего порядка:
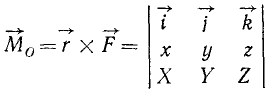 (17 / )
(17 / )
Раскладывая этот определитель по элементам первой строки, найдем: 

Сравнив это равенство с (22′), получим формулы (23).
Обратим внимание на то, что правая часть третьей из формул (23) тождественна выражению (16) момента силы, лежащей в плоскости хОу, относительно начала координат. Объяснение заключается в том, что при выводе формулы (23) для определения Мz силу сначала спроецировали на плоскость хОу и затем определили момент проекции относительно начала координат. Формула же (16) выражает момент относительно начала координат силы, лежащей в плоскости хОу. Моменты этой силы относительно осей, расположенных с ней в одной плоскости, равны нулю (Mx= 0, My= 0), а момент относительно оси Oz численно равен величине момента относительно начала координат (Mz = M0).
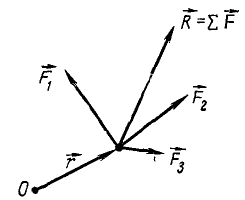
Рис. 34
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Теория пар, не лежащих в одной плоскости
- Произвольная пространственная система сил
- Центр параллельных сил и центр тяжести
- Поступательное движение твердого тела
- Равновесие системы, состоящей из нескольких тел
- Графостатика в теоретической механике
- Расчет ферм
- Пространственная система сходящихся сил
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://skysmart.ru/articles/physics/moment-sily
http://www.evkova.org/moment-silyi-otnositelno-tochki-i-otnositelno-osi-v-teoreticheskoj-mehanike