Содержание:
При измерении разных физических величин мы получаем их числовые значения с определенной точностью. Например, при определении размеров листа бумаги (длины, ширины) мы можем указать их с точностью до миллиметра; размеры стола – с точностью до сантиметра, размеры дома, стадиона – с точностью до метра.
Нет необходимости указывать размеры стола с точностью до миллиметра, а размеры стадиона с точностью до сантиметра или миллиметра. Мы сами в каждой ситуации, опыте и эксперименте определяем, с какой точностью нам нужны данные физические величины. Однако очень важно оценивать, насколько точно мы определяем физическую величину, какую ошибку (погрешность) в ее измерении допускаем.
При измерении мы не можем определить истинное значение измеряемой величины, а только пределы, в которых она находится.
Пример:
Измерим ширину стола рулеткой с сантиметровыми и миллиметровыми делениями на ней (рис. 5.1). Значение наименьшего деления шкалы называют ценой деления и обозначают буквой С. Видно, что цена деления рулетки С = 1 мм (или 0,1 см).
Совместим нулевое деление рулетки с краем стола и посмотрим, с каким значением
шкалы линейки совпадает второй край стола (рис. 5.1). Видно, что ширина стола составляет чуть больше 70 см и 6 мм, или 706 мм. Но результат наших измерений мы запишем с точностью до 1 мм, то есть L = 706 мм.

Абсолютная погрешность измерения ∆ (ДЕЛЬТА)
Из рис. 5.1 видно, что мы допускаем определенную погрешность и определить ее «на глаз» достаточно трудно. Эта погрешность составляет не более половины цены деления шкалы рулетки. Эту погрешность называют погрешностью измерения и помечают ∆L («дельта эль»). В данном эксперименте ее можно записать
Сам результат измерения принято записывать таким образом: ширина стола L = (706,0 ± 0,5) мм, читают: 706 плюс-минус 0,5 мм. Эти 0,5 мм в нашем примере называют абсолютной погрешностью. Значения измеряемой величины (706,0 мм) и абсолютной погрешности (0,5 мм) должны иметь одинаковое количество цифр после запятой, то есть нельзя записывать 706 мм ± 0,5 мм.
Такая запись результата измерения означает, что истинное значение измеряемой величины находится между 705,5 мм и 706,5 мм, то есть 705,5 мм ≤ L ≤ 706,5 мм.
Относительная погрешность измерения ε (ЭПСИЛОН)
Иногда важно знать, какую часть составляет наша погрешность от значения
измеряемой величины. Для этого разделим 0,5 мм на 706 мм. В результате получим:  . То есть наша ошибка составляет 0,0007 долю ширины стола, или 0,0007 · 100% = 0,07%. Это свидетельствует о достаточно высокой точности измерения. Эту погрешность называют относительной и обозначают греческой буквой (эпсилон):
. То есть наша ошибка составляет 0,0007 долю ширины стола, или 0,0007 · 100% = 0,07%. Это свидетельствует о достаточно высокой точности измерения. Эту погрешность называют относительной и обозначают греческой буквой (эпсилон):
 (5.1)
(5.1)
Относительная погрешность измерения свидетельствует о качестве измерения. Если длина какогото предмета равна 5 мм, а точность измерения – плюс-минус 0,5 мм, то относительная погрешность будет составлять уже 10%.
Стандартная запись результата измерений и выводы
Таким образом, абсолютная погрешность в примере 5.1. составляет ∆L = 0,5 мм, а результат измерений следует записать в стандартном виде: L = (706,0  0,5) мм — Опыт выполнен с относительной погрешностью 0,0007 или 0,07%.
0,5) мм — Опыт выполнен с относительной погрешностью 0,0007 или 0,07%.
На точность измерения влияет много факторов, в частности:
- При совмещении края стола с делением шкалы рулетки мы неминуемо допускаем погрешность, поскольку делаем это «на глаз» — смотреть можно под разными углами.
- Не вполне ровно установили рулетку.
- Наша рулетка является копией эталона и может несколько отличаться от оригинала.
Все это необходимо учитывать при проведении измерений.
Итоги:
- Измерения в физике всегда неточны, и надо знать пределы погрешности измерений, чтобы понимать, насколько можно доверять результатам.
- Абсолютную погрешность измерения можно определить как половину цены деления шкалы измерительного прибора.
- Относительная погрешность есть частное от деления абсолютной погрешности на значение измеряемой величины:
 и указывает на качество измерения. Ее можно выразить в процентах.
и указывает на качество измерения. Ее можно выразить в процентах.
Измерительные приборы
Устройства, с помощью которых измеряют физические величины, называют измерительными приборами.
Простейший и хорошо известный вам измерительный прибор — линейка с делениями. На ее примере вы видите, что у измерительного прибора есть шкала, на которой нанесены деления, причем возле некоторых делений написано соответствующее значение физической величины. Так, значения длины в сантиметрах нанесены на линейке возле каждого десятого деления (рис. 3.11). Значения же, соответствующие «промежуточным» делениям шкалы, можно найти с помощью простого подсчета.
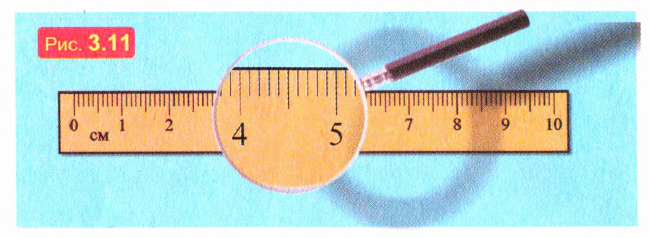
Разность значений физической величины, которые соответствуютближайшим делениям шкалы, называют ценой деления прибора. Ёе находят так: берут ближайшие деления, возле которых написаны значения величины, и делят разность этих значений на количество промежутков между делениями, расположенными между ними.
Например, ближайшие сантиметровые деления на линейке разделены на десять промежутков. Значит, цена деления линейки равна 0,1 см = 1 мм.
Как определяют единицы длины и времени
В старину мерами длины служили большей частью размеры человеческого тела и его частей. Дело в том, что собственное тело очень удобно как «измерительный прибор», так как оно всегда «рядом». И вдобавок «человек есть мера всех вещей»: мы считаем предмет большим или малым, сравнивая его с собой.
Так, длину куска ткани измеряли «локтями», а мелкие предметы — «дюймами» (это слово происходит от голландского слова, которое означает «большой палец»).
Однако человеческое тело в качестве измерительного прибора имеет существенный недостаток: размеры тела и его частей у разных людей заметно отличаются. Поэтому ученые решили определить единицу длины однозначно и точно. Международным соглашением было принято, что один метр равен пути, который проходит свет в вакууме за 1/299792458 с. А секунду определяют с помощью атомных часов, которые сегодня являются самыми точными.
Можно ли расстояние измерять годами
Именно так и измеряют очень большие расстояния — например, расстояния между звездами! Но при этом речь идет не о годах как промежутках времени, а о «световых годах». А один световой год — это расстояние, которое проходит свет за один земной год. По нашим земным меркам это очень большое расстояние — чтобы убедиться в этом, попробуйте выразить его в километрах! А теперь вообразите себе, что расстояние от Солнца до ближайшей к нему звезды составляет больше четырех световых лет! И по астрономическим масштабам это совсем небольшое расстояние: ведь с помощью современных телескопов астрономы тщательно изучают звезды, расстояние до которых составляет много тысяч световых лет!
Что надо знать об измерительных приборах
Приступая к измерениям, необходимо, прежде всего, подобрать приборы. Что надо знать об измерительных приборах?
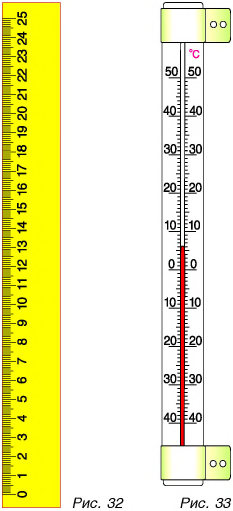
Минимальное (нижний предел) и максимальное (верхний предел) значения шкалы прибора — это пределы измерения. Чаще всего предел измерения один, но может быть и два. Например, линейка имеет один предел — верхний. У линейки на рисунке 32 он равен 25 см. У термометра на рисунке 33 два предела: верхний предел измерения температуры равен +50 °С; нижний -40 °С.
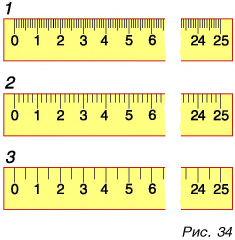
На рисунке 34 изображены три линейки с одинаковыми верхними пределами (25 см). По эти линейки измеряют длину с различной точностью. Наиболее точные результаты измерений дает линейка 7, наименее точные — линейка 3. Что же такое точность измерений и от чего она зависит? Для ответа на эти вопросы рассмотрим сначала понятие цена деления шкалы прибора.
Цена деления — это значение наименьшего деления шкалы прибора.
Как определить цену деления шкалы? Для этого необходимо:
- выбрать на шкале линейки два соседних значения, например 3 см и 4 см;
- подсчитать число делений (не штрихов!) между этими значениями; например, на линейке 1 (см. рис. 34) число делений между значениями 3 см и 4 см равно 10;
- вычесть из большего значения меньшее (4 см — 3 см = 1 см) и результат разделить на число делений.
Полученное значение и будет ценой деления шкалы прибора. Обозначим ее буквой С.
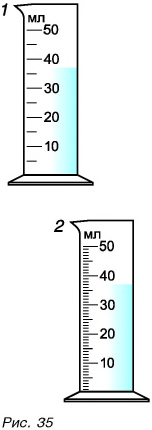
Точно так же можно определить и цену деления шкалы мензурок 1 и 2 (рис. 35). Цена деления шкалы мензурки 1:

Цена деления шкалы мензурки 2:

А какими линейкой и мензуркой можно измерить точнее?
Измерим один и тот же объем мензуркой 1 и мензуркой 2. Но показаниям шкал в мензурке 1 объем воды V = 35 мл; в мензурке 2 — V = 37 мл.
Понятно, что точнее измерен объем воды мензуркой 2, цена деления которой меньше  Значит, чем меньше цена деления шкалы, тем точнее можно измерить данным прибором. Говорят: мензуркой 1 мы измерили объем с точностью до 5 мл (сравните с ценой деления шкалы
Значит, чем меньше цена деления шкалы, тем точнее можно измерить данным прибором. Говорят: мензуркой 1 мы измерили объем с точностью до 5 мл (сравните с ценой деления шкалы  ), мензуркой 2 — с точностью до 1 мл (сравните с ценой деления
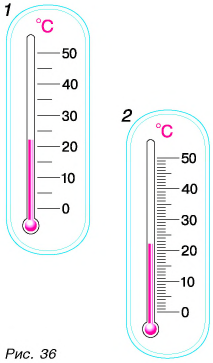
), мензуркой 2 — с точностью до 1 мл (сравните с ценой деления  ). Точность измерения температуры термометрами 1 и 2 (рис. 36) определите самостоятельно.
). Точность измерения температуры термометрами 1 и 2 (рис. 36) определите самостоятельно.
Итак, любым прибором, имеющим шкалу, измерить физическую величину можно с точностью, не превышающей цены деления шкалы.
Линейкой 1 (см. рис. 34) можно измерить длину с точностью до 1 мм. Точность измерения длины линейками 2 и 3 определите самостоятельно.
Главные выводы:
- Верхний и нижний пределы измерения — это максимальное и минимальное значения шкалы прибора.
- Цена деления шкалы равна значению наименьшего деления шкалы.
- Чем меньше цена деления шкалы, тем точнее будут проведены измерения данным прибором.
Для любознательных:
В истории науки есть немало случаев, когда повышение точности измерений давало толчок к новым открытиям. Более точные измерения плотности азота, выделенного из воздуха, позволили в 1894 г. открыть новый инертный газ — аргон. Повышение точности измерений плотности воды привело к открытию в 1932 г. одной из разновидностей тяжелых атомов водорода — дейтерия. Позже дейтерий вошел в состав ядерного горючего. Оценить расстояния до звезд и создать их точные каталоги ученые смогли благодаря повышению точности при измерении положения ярких звезд на небе.
- Заказать решение задач по физике
Пример решения задачи
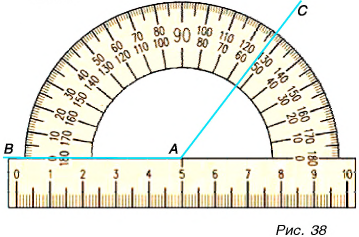
Для измерения величины угла используют транспортир. Определите: 1) цену деления каждой шкалы транспортира, изображенного на рисунке 38; 2) значение угла BАС, используя каждую шкалу; укажите точность измерения угла ВАС в каждом случае.
Решение:
1) Цена деления нижней шкалы:

Цена деления средней шкалы:

Цена деления верхней шкалы:
2) Определенный но нижней шкале с точностью до 10°  определенный по средней шкале с точностью до 5°
определенный по средней шкале с точностью до 5°  определенный по верхней шкале с точностью до 1°
определенный по верхней шкале с точностью до 1° 
- Определение площади и объема
- Связь физики с другими науками
- Макромир, мегамир и микромир в физике
- Пространство и время
- Как зарождалась физика
- Единая физическая картина мира
- Физика и научно-технический прогресс
- Физические величины и их единицы измерения
Цель:
сформировать навыки решения задач на
вычислительные погрешности.
-
Основные теоретические сведения
1.1.Абсолютная и относительная погрешность
Определение.
Приближенным числом

называется
число, незначительно отличающееся от
точного числа

и
заменяющее последнее в вычислениях.
Математическая
запись

Определение.
Под абсолютной погрешностью Δ приближенного
числа
понимается
разность

Отсюда
следует, что
заключено
в пределах

или

Определение.
Относительной погрешностью

приближенного
числа
называется
отношение абсолютной погрешности

этого
числа к модулю соответствующего точного
числа

Так
как
обычно
неизвестно, то на практике применяют
оценку

1.2.Верные цифры числа
Всякое
положительное число
может
быть представлено в виде конечной или
бесконечной десятичной дроби

где

—
цифра числа
в
i
– м разряде, m
– старший десятичный разряд числа.
Пример:

Определение.
Значащей цифрой приближенного числа
называется
всякая цифра в его десятичном представлении,
отличная от нуля, и нуль, если он содержится
между значащими цифраи или является
представителем сохраненного десятичного
разряда.
Пример.
=
0.002080. Здесь только первые три нуля не
являются значащими.
Определение.
n
первых значащих цифр приближенного
числа
являются
верными, если абсолютная погрешность
этого числа не превышает половины
разряда, выражаемого n
– й значащей цифрой, считая слева
направо. Цифры, не являющиеся верными,
называются сомнительными
Пример.
Если в числе
=
0.03450 все цифры верные, то

.
Таким
образом, если для приближенного числа
известно,
что

то,
по определению, первые n
цифр

этого
числа являются верными.
Пример.

,

.
Тогда

Т.е.
m-n+1=-1.
Т.к. m
= 1, то n
= 3. Следовательно, приближенное число
имеет
3 верных цифры и его следует округлить
следующим образом:

1.3. Связь относительной погрешности с количеством верных знаков числа
Если
положительное приближенное число
имеет
относительную погрешность
,
то количество верных знаков n
данного числа можно определить по
формуле

и
в качестве n
взять ближайшее целое к

число.
-
Погрешности арифметических действий



Общая
формула вычисления погрешности
-
Машинный нуль, машинная бесконечность, машинный эпсилон.
В
ЭВМ для вещественных чисел используется
двоичная система счисления и принята
форма представления чисел с плавающей
точкой

,

.
Здесь

—
мантисса;

—
двоичные цифры, причем всегда

=1,
p-целое
число называемое двоичным порядком.
Количество t
цифр, которое отводится для записи
мантиссы, называется разрядностью
мантиссы. Диапазон представления чисел
в ЭВМ ограничен конечной разрядностью
мантиссы и значением числа p.
Все представимые числа на ЭВМ удовлетворяют
неравенствам:

,
где

,

.
Все числа, по модулю большие

,
не представимы на ЭВМ и рассматриваются
как машинная бесконечность. Все числа,
по модулю меньшие

,
для ЭВМ не отличаются от нуля и
рассматриваются как машинный нуль.
Машинным эпсилон

называется
относительная точность ЭВМ, то есть
граница относительной погрешности
представления чисел в ЭВМ. Покажем, что

.
Пусть

,
тогда граница абсолютной погрешности
представления этого числа равна

.
Поскольку

,
то величина относительной погрешности
представления оценивается так:

.
Машинное
эпсилон определяется разрядностью
мантиссы и способом округления чисел,
реализованным на конкретной ЭВМ.
Примем
следующие способы определения приближенных
значений параметров, требуемых в задаче:
1.
Положим

,
где n
— первое натуральное число, при котором
происходит переполнение.
2.
Положим

,
где m
– первое натуральное число , при котором

совпадает
с нулем.
3.
Положим

,
где k
– наибольшее натуральное число, при
котором сумма вычисленного значения
1+

еще
больше 1. Фактически
есть
граница относительной погрешности
представления числа

.
Результаты
вычислительного эксперимента:
Машинная
бесконечность

Машинный
нуль

Машинное
эпсилон

Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
В задании 22 ЕГЭ по физике (2017) нужно уметь определять погрешности вычислений различных величин. Теория вычисления различных погрешностей — сложная самостоятельная наука, которую преподают обычно в вузах. Для школы и для успешной сдачи экзамена нам потребуются базовые знания, которые я и собрала в этой статье.
В практической деятельности человеку приходится измерять различные величины, производить различные вычисления. Результатами измерений, подсчетов и вычислений являются числа. Однако точные измерения невозможны ввиду несовершенства наших органов зрения, неточности измерительных приборов и некоторых свойств самих измеряемых объектов.
При различных измерениях одной и той же величины получают различные приближенные значения. Каждое из этих приближений отличается от истинного значения на некоторую величину, называемую погрешностью.
Абсолютной погрешностью называется модуль разности истинного и приближенного значения некоторой величины, обозначается она буквой и измеряется в тех же единицах, что и вычисляемая величина:
Где — истинное значение, — приближенное.
Из этого определения следует, что истинное значение величины равно приближенному значению плюс-минус абсолютная погрешность :
Абсолютная погрешность приближения не характеризует качества измерений, т.к., например, точность 1 см для определения ширины стадиона является высокой, а для определения длины листа бумаги — низкой. Поэтому для характеристики точности измерения вводится понятие относительной погрешности.
Относительной погрешностью приближения называется отношение абсолютной погрешности приближения к модулю числа приближенного значения. Обозначается относительная погрешность буквой (эпсилон) и выражается в процентах:
Далее я приведу таблицу правил определения погрешностей сумм, разностей, произведений и т.п.

Погрешности
Ну и теперь порешаем задачи, чтобы окончательно разобраться.
Задача 1.
Чтобы оценить, каков будет период малых колебаний математического маятника, используем для вычислений на калькуляторе формулу . По оценке «на глазок» длина нити равна м. Калькулятор показывает на экране число 2,4322335. Чему равен, с учётом погрешности оценки длины нити, период колебаний маятника? (Ответ дайте в секундах, значение и погрешность запишите через точку с запятой без пробелов.)
Относительная погрешность определения периода равна
С другой стороны, по таблице находим, что
Тогда
Тогда
Так как по правилам вычисления погрешностей мы должны оставить одну значащую цифру, то получим c, так как погрешность определена с точностью до сотых, то период тоже округляем до сотых: . Имеем:
Ответ: 2,43;0,08
Задача 2.
При определении массы масла плотностью 0,9 г/см ученик измерил объём масла с использованием мерного цилиндра: см. Запишите в ответ массу масла в граммах с учётом погрешности измерений через точку с запятой без пробелов.
Определяем массу масла:
Определим погрешность вычисления:
Оставляя одну значащую цифру, имеем: г — тогда с такой же точностью и саму величину запишем:
Ответ: 16,2;0,5
Определяем машинный ноль, машинную бесконечность и машинный эпсилон
Доверять расчёту, сделанному на компьютере, без тени понимания того, как именно выполнен этот расчёт — одна из худший вещей, которые может допустить в своей работе инженер. К сожалению, уже нередки «специалисты», которых не смущает ненулевой результат, полученный при умножении на ноль, или, напротив, ноль там, где теоретически нуля быть не должно.
Поэтому повторим в этой заметке несколько азбучных истин о представлении вещественных чисел в компьютере и правилах выполнения операций с ними.
В IBM-совместимой ЭВМ для вещественных чисел используется двоичная система счисления и принята форма представления чисел с плавающей точкой вида
x = m*2p, где мантисса m = ± (g1*2-1 +,
g2*2-2 + ... +
gt*2-t)
g1, ..., gt — двоичные цифры, причём, g1=1, а целое значение p называется двоичным порядком. Количество цифр t, которое отводится для записи мантиссы, называется разрядностью мантиссы. Диапазон представления чисел в ЭВМ ограничен конечной разрядностью мантиссы и значением числа p.
Все представимые на ЭВМ вещественные числа x удовлетворяют неравенствам
0 < X0 ≤ |x| < X∞, где
X0 = 2-pmax+1,
X∞ = 2pmax, а значение pmax соответствует разрядности вычислительной системы.
Все числа, по модулю большие X∞, не представимы на ЭВМ и рассматриваются как машинная бесконечность. Все числа, по модулю меньшие X0, для компьютера не отличаются от нуля и рассматриваются как машинный ноль. Машинным эпсилон εM называется относительная точность ЭВМ, то есть граница относительной погрешности представления вещественных чисел. Можно показать, что εM ≈ 2-t. Пусть
x* = m*2p. Тогда граница абсолютной погрешности представления этого числа равна Δ(x*) ≈ 2-t-1*2p. Поскольку 1/2≤m<1, то величина относительной погрешности представления оценивается как
δ(x*) ≈ Δ(x*) / |x*| ≈ (2-t-1*2p) / (m*2p) = 2-t-1 / m ≤ 2-t-1 / 2-1 = 2-t.
Машинное эпсилон определяется разрядностью мантиссы и способом округления чисел, реализованным на конкретной ЭВМ.
Примем следующие способы определения приближённых значений искомых величин:
- положим
X∞ = 2n, гдеn— первое натуральное число, при котором произошло переполнение; - положим
X0 = 2-m, гдеm– первое натуральное число , при котором2-mсовпадает с нулем; - положим
εM = 2-k, гдеk– наибольшее натуральное число, при котором сумма вычисленного значения1+2-kещё больше1. Фактически,εMесть граница относительной погрешности представления числаx* ≈ 1.
Дальше задаём это в нужной среде (пакете) и подбираем значения параметров, вот пример для моего MathCAD 15:

машинный ноль, машинная бесконечность и машинный эпсилон в MathCAD 15
А вот что вышло в Visual Studio 2010 при использовании проекта Windows Forms, C++/CLI, библиотеки System::Math и типа данных long double:
Inf: 1024 Zero: 1075 Eps: 53
Код:
//Функции для подсчёта
long double inf (int n) { return Math::Pow(2.,n); }
long double zero (int m) { return Math::Pow(2.,-m); }
long double eps (int k) { return 1.+Math::Pow(2.,-k); }
//...
//Расчёт, сделанный по нажатию кнопки с выводом результатов в метку label1
label1->Text = "";
int n=1,m=1,k=1;
long double res;
while (1) {
res=inf(n);
if (res==Double::PositiveInfinity) break;
else n++;
};
label1->Text += "Inf: " + n + Environment::NewLine;
while (1) {
res=zero(m);
if (res==0.) break;
else m++;
};
label1->Text += "Zero: " + m + Environment::NewLine;
while (1) {
res=eps(k);
if (res==1.) break;
else k++;
};
label1->Text += "Eps: " + k + Environment::NewLine;
Ну и пара стандартных напоминаний напоследок:
К вещественным значениям в общем случае неприменима операция
==(«сравнение») из-за неточного представления этих значений в памяти компьютера. Поэтому для вещественных переменных отношение видаa==bобычно заменяется наfabs(a-b)≤eps, гдеfabs()— функция вычисления модуля вещественного числа, аeps— малая величина, определяющая допустимую погрешность.
Допустимую погрешность можно ввести в расчёт также через стандартный метод округления round, например, левый расчёт произведения чисел в MathCAD не даст нуля, а правый — да:
")
учёт погрешностей через метод round (Mathcad)
27.10.2015, 17:32 [26347 просмотров]
Материал из MachineLearning.
Перейти к: навигация, поиск
Содержание
- 1 Введение
- 1.1 Постановка вопроса. Виды погрешностей
- 2 Виды мер точности
- 3 Предельные погрешности
- 4 Погрешности округлений при представлении чисел в компьютере
- 5 Погрешности арифметических операций
- 6 Погрешности вычисления функций
- 7 Числовые примеры
- 8 Список литературы
- 9 См. также
Введение
Постановка вопроса. Виды погрешностей
Процесс исследования исходного объекта методом математического моделирования и вычислительного эксперимента неизбежно носит приближенный характер, так как на каждом этапе вносятся погрешности. Построение математической модели связано с упрощением исходного явления, недостаточно точным заданием коэффициентов уравнения и других входных данных. По отношению к численному методу, реализующему данную математическую модель, указанные погрешности являются неустранимыми, поскольку они неизбежны в рамках данной модели.
При переходе от математической модели к численному методу возникают погрешности, называемые погрешностями метода. Они связаны с тем, что всякий численный метод воспроизводит исходную математическую модель приближенно. Наиболее типичными погрешностями метода являются погрешность дискретизации и погрешность округления.
При построении численного метода в качестве аналога исходной математической задачи обычно рассматривается её дискретная модель. Разность решений дискретизированной задачи и исходной называется погрешностью дискретизации. Обычно дискретная модель зависит от некоторого параметра (или их множества) дискретизации, при стремлении которого к нулю должна стремиться к нулю и погрешность дискретизации.
Дискретная модель представляет собой систему большого числа алгебраических уравнений. Для её решения используется тот или иной численный алгоритм. Входные данные этой системы, а именно коэффициенты и правые части, задаются в ЭВМ не точно, а с округлением. В процессе работы алгоритма погрешности округления обычно накапливаются, и в результате, решение, полученное на ЭВМ, будет отличаться от точного решения дискретизированной задачи. Результирующая погрешность называется погрешностью округления (вычислительной погрешностью). Величина этой погрешности определяется двумя факторами: точностью представления вещественных чисел в ЭВМ и чувствительностью данного алгоритма к погрешностям округления.
Итак, следует различать погрешности модели, дискретизации и округления. В вопросе преобладания какой-либо погрешности ответ неоднозначен. В общем случае нужно стремиться, чтобы все погрешности имели один и тот же порядок. Например, нецелесообразно пользоваться разностными схемами, имеющими точность 10−6, если коэффициенты исходных уравнений задаются с точностью 10−2.
Виды мер точности
Мерой точности вычислений являются абсолютные и относительные погрешности. Абсолютная погрешность определяется формулой
где – приближение к точному значению .
Относительная погрешность определяется формулой
Относительная погрешность часто выражается в процентах. Абсолютная и относительная погрешности тесно связаны с понятием верных значащих цифр. Значащими цифрами числа называют все цифры в его записи, начиная с первой ненулевой цифры слева. Например, число 0,000129 имеет три значащих цифры. Значащая цифра называется верной, если абсолютная погрешность числа не превышает половины веса разряда, соответствующего этой цифре. Например, , абсолютная погрешность . Записывая число в виде
имеем , следовательно, число имеет две верных значащих цифр (9 и 3).
В общем случае абсолютная погрешность должна удовлетворять следующему неравенству:
где — порядок (вес) старшей цифры, — количество верных значащих цифр.
В рассматриваемом примере .
Относительная погрешность связана с количеством верных цифр приближенного числа соотношением:
где — старшая значащая цифра числа.
Для двоичного представления чисел имеем .
Тот факт, что число является приближенным значением числа с абсолютной погрешностью , записывают в виде
причем числа и записываются с одинаковым количеством знаков после запятой, например, или .
Запись вида
означает, что число является приближенным значение числа с относительной погрешностью .
Так как точное решение задачи как правило неизвестно, то погрешности приходится оценивать через исходные данные и особенности алгоритма. Если оценка может быть вычислена до решения задачи, то она называется априорной. Если оценка вычисляется после получения приближенного решения задачи, то она называется апостериорной.
Очень часто степень точности решения задачи характеризуется некоторыми косвенными вспомогательными величинами. Например точность решения системы алгебраических уравнений
характеризуется невязкой
где — приближенное решение системы.
Причём невязка достаточно сложным образом связана с погрешностью решения , причём если невязка мала, то погрешность может быть значительной.
Предельные погрешности
Пусть искомая величина является функцией параметров — приближенное значение . Тогда предельной абсолютной погрешностью называется величина
Предельной относительной погрешностью называется величина .
Пусть — приближенное значение . Предполагаем, что — непрерывно дифференцируемая функция своих аргументов. Тогда, по формуле Лагранжа,
где .
Отсюда
где .
Можно показать, что при малых эта оценка не может быть существенно улучшена. На практике иногда пользуются грубой (линейной) оценкой
где .
Несложно показать, что:
- — предельная погрешность суммы или разности равна сумме предельных погрешностей.
- — предельная относительная погрешность произведения или частного приближенного равна сумме предельных относительных погрешностей.
Погрешности округлений при представлении чисел в компьютере
Одним из основных источников вычислительных погрешностей является приближенное представление чисел в компьютере, обусловленное конечностью разрядной сетки (см. Международный стандарт представления чисел с плавающей точкой в ЭВМ). Число , не представимое в компьютере, подвергается округлению, т. е. заменяется близким числом , представимым в компьютере точно.
Найдем границу относительной погрешности представления числа с плавающей точкой. Допустим, что применяется простейшее округление – отбрасывание всех разрядов числа, выходящих за пределы разрядной сетки. Система счисления – двоичная. Пусть надо записать число, представляющее бесконечную двоичную дробь
где , — цифры мантиссы.
Пусть под запись мантиссы отводится t двоичных разрядов. Отбрасывая лишние разряды, получим округлённое число
Абсолютная погрешность округления в этом случае равна
Наибольшая погрешность будет в случае , тогда
Т.к. , где — мантисса числа , то всегда . Тогда и относительная погрешность равна . Практически применяют более точные методы округления и погрешность представления чисел равна
( 1 )
т.е. точность представления чисел определяется разрядностью мантиссы .
Тогда приближенно представленное в компьютере число можно записать в виде , где – «машинный эпсилон» – относительная погрешность представления чисел.
Погрешности арифметических операций
При вычислениях с плавающей точкой операция округления может потребоваться после выполнения любой из арифметических операций. Так умножение или деление двух чисел сводится к умножению или делению мантисс. Так как в общем случае количество разрядов мантисс произведений и частных больше допустимой разрядности мантиссы, то требуется округление мантиссы результатов. При сложении или вычитании чисел с плавающей точкой операнды должны быть предварительно приведены к одному порядку, что осуществляется сдвигом вправо мантиссы числа, имеющего меньший порядок, и увеличением в соответствующее число раз порядка этого числа. Сдвиг мантиссы вправо может привести к потере младших разрядов мантиссы, т.е. появляется погрешность округления.
Округленное в системе с плавающей точкой число, соответствующее точному числу , обозначается через (от англ. floating – плавающий). Выполнение каждой арифметической операции вносит относительную погрешность, не большую, чем погрешность представления чисел с плавающей точкой (1). Верна следующая запись:
где — любая из арифметических операций, .
Рассмотрим трансформированные погрешности арифметических операций. Арифметические операции проводятся над приближенными числами, ошибка арифметических операций не учитывается (эту ошибку легко учесть, прибавив ошибку округления соответствующей операции к вычисленной ошибке).
Рассмотрим сложение и вычитание приближенных чисел. Абсолютная погрешность алгебраической суммы нескольких приближенных чисел равна сумме абсолютных погрешностей слагаемых.
Если сумма точных чисел равна
сумма приближенных чисел равна
где — абсолютные погрешности представления чисел.
Тогда абсолютная погрешность суммы равна
Относительная погрешность суммы нескольких чисел равна
( 2 )
где — относительные погрешности представления чисел.
Из (2) следует, что относительная погрешность суммы нескольких чисел одного и того же знака заключена между наименьшей и наибольшей из относительных погрешностей слагаемых:
При сложении чисел разного знака или вычитании чисел одного знака относительная погрешность может быть очень большой (если числа близки между собой). Так как даже при малых величина может быть очень малой. Поэтому вычислительные алгоритмы необходимо строить таким образом, чтобы избегать вычитания близких чисел.
Необходимо отметить, что погрешности вычислений зависят от порядка вычислений. Далее будет рассмотрен пример сложения трех чисел.
( 3 )
При другой последовательности действий погрешность будет другой:
Из (3) видно, что результат выполнения некоторого алгоритма, искаженный погрешностями округлений, совпадает с результатом выполнения того же алгоритма, но с неточными исходными данными. Т.е. можно применять обратный анализ: свести влияние погрешностей округления к возмущению исходных данных. Тогда вместо (3) будет следующая запись:
где
При умножении и делении приближенных чисел складываются и вычитаются их относительные погрешности.
-
-
- ≅
с точностью величин второго порядка малости относительно .
Тогда .
Если , то ≅
При большом числе n арифметических операций можно пользоваться приближенной статистической оценкой погрешности арифметических операций, учитывающей частичную компенсацию погрешностей разных знаков:
где – суммарная погрешность, – погрешность выполнения операций с плавающей точкой, – погрешность представления чисел с плавающей точкой.
Погрешности вычисления функций
Рассмотрим трансформированную погрешность вычисления значений функций.
Абсолютная трансформированная погрешность дифференцируемой функции , вызываемая достаточно малой погрешностью аргумента , оценивается величиной .
Если , то .
Абсолютная погрешность дифференцируемой функции многих аргументов , вызываемая достаточно малыми погрешностями аргументов оценивается величиной:
-
- .
Если , то .
Практически важно определить допустимую погрешность аргументов и допустимую погрешность функции (обратная задача). Эта задача имеет однозначное решение только для функций одной переменной , если дифференцируема и :
-
- .
Для функций многих переменных задача не имеет однозначного решения, необходимо ввести дополнительные ограничения. Например, если функция наиболее критична к погрешности , то:
-
- (погрешностью других аргументов пренебрегаем).
Если вклад погрешностей всех аргументов примерно одинаков, то применяют принцип равных влияний:
Числовые примеры
Специфику машинных вычислений можно пояснить на нескольких элементарных примерах.
ПРИМЕР 1. Вычислить все корни уравнения
Точное решение задачи легко найти:
Если компьютер работает при , то свободный член в исходном уравнении будет округлен до и, с точки зрения представления чисел с плавающей точкой, будет решаться уравнение , т.е. , что, очевидно, неверно. В данном случае малые погрешности в задании свободного члена привели, независимо от метода решения, к погрешности в решении .
ПРИМЕР 2. Решается задача Коши для обыкновенного дифференциального уравнения 2-го порядка:
Общее решение имеет вид:
При заданных начальных данных точное решение задачи: , однако малая погрешность в их задании приведет к появлению члена , который при больших значениях аргумента может существенно исказить решение.
ПРИМЕР 3. Пусть необходимо найти решение обыкновенного дифференциального уравнения:
Его решение: , однако значение известно лишь приближенно: , и на самом деле .
Соответственно, разность будет:
Предположим, что необходимо гарантировать некоторую заданную точность вычислений всюду на отрезке . Тогда должно выполняться условие:
Очевидно, что:
Отсюда можно получить требования к точности задания начальных данных при .
Таким образом, требование к заданию точности начальных данных оказываются в раз выше необходимой точности результата решения задачи. Это требование, скорее всего, окажется нереальным.
Решение оказывается очень чувствительным к заданию начальных данных. Такого рода задачи называются плохо обусловленными.
ПРИМЕР 4. Решением системы линейных алгебраических уравнений (СЛАУ):
является пара чисел .
Изменив правую часть системы на , получим возмущенную систему:
с решением , сильно отличающимся от решения невозмущенной системы. Эта система также плохо обусловлена.
ПРИМЕР 5. Рассмотрим методический пример вычислений на модельном компьютере, обеспечивающем точность . Проанализируем причину происхождения ошибки, например, при вычитании двух чисел, взятых с точностью до третьей цифры после десятичной точки , разность которых составляет .
В памяти машины эти же числа представляются в виде:
-
- , причем и
Тогда:
Относительная ошибка при вычислении разности будет равна:
Очевидно, что , т.е. все значащие цифры могут оказаться неверными.
ПРИМЕР 6. Рассмотрим рекуррентное соотношение
Пусть при выполнении реальных вычислений с конечной длиной мантиссы на -м шаге возникла погрешность округления, и вычисления проводятся с возмущенным значением , тогда вместо получим , т.е. .
Следовательно, если , то в процессе вычислений погрешность, связанная с возникшей ошибкой округления, будет возрастать (алгоритм неустойчив). В случае погрешность не возрастает и численный алгоритм устойчив.
Список литературы
- А.А.Самарский, А.В.Гулин. Численные методы. Москва «Наука», 1989.
- http://www.mgopu.ru/PVU/2.1/nummethods/Chapter1.htm
- http://www.intuit.ru/department/calculate/calcmathbase/1/4.html
См. также
- Практикум ММП ВМК, 4й курс, осень 2008