§2. Законы Ньютона. Импульс или количество движения материальной точки
В основе динамики материальной точки лежат законы (аксиомы) Ньютона. Напомним ключевые определения и законы.
Система отсчёта, в которой любая материальная точка, не взаимодействующая с другими телами (такая точка называется свободной), движется равномерно и прямолинейно или покоится, называется инерциальной.
инерциальные системы отсчёта (ИСО) существуют
в ИСО приращение импульса материальной точки пропорционально силе и происходит по направлению силы:
`Delta vec p = vec F * Delta t` (1)
Импульсом (или количеством движения) материальной точки называют физическую величину, определяемую произведением её массы на вектор скорости в данной системе отсчёта:
`vec p = m * vec v`.
`vec F` — сумма сил, действующих на материальную точку. Величину `vec F * Delta t` называют импульсом силы за время от `t` до `t + Delta t`, в течение которого силу можно считать неизменной по величине и направлению. Величину `Delta vec p = vec p (t + Delta t) — vec p (t)` называют приращением импульса материальной точки за время от `t` до `t + Delta t`. Поэтому второй закон Ньютона для материальной точки можно сформулировать так:
в ИСО приращение импульса материальной точки равно импульсу силы.
Отметим, что при изучении динамики второй закон Ньютона часто формулируют следующим образом:
в ИСО ускорение материальной точки прямо пропорционально сумме сил, действующих на неё, и обратно пропорционально её массе:
`vec a = vec F/m` (2)
Если масса тела остаётся неизменной, то `Delta vec p = Delta (m vec v) = m Delta vec v`, и соотношение (1) принимает вид `m Delta vec v = vec F Delta t`. С учётом `vec a = (Delta vec v)/(Delta t)` приходим к эквивалентности соотношений (1) и (2) в рассматриваемом случае.
В настоящем Задании представлены задачи, для решения которых привлекается второй закон Ньютона (см.(1)), устанавливающий равенство приращений импульса материальной точки и импульса силы.
при взаимодействии двух материальных точек сила `vecF_(12)`, действующая на первую материальную точку со стороны второй, равна по величине и противоположна по направлению силе `vecF_(21)`, действующей со стороны первой материальной точки на вторую:
`vecF_(12) = — vecF_(21)`.
1) силы возникают парами и имеют одинаковую природу, они приложены к разным материальным точкам,
2) эти силы равны по величине,
3) они действуют вдоль одной прямой в противоположных направлениях.
Заметим, что согласно третьему закону Ньютона обе силы должны быть равны по величине в любой момент времени независимо от движения взаимодействующих тел. Другими словами, если в системе двух взаимодействующих тел изменить положение одного из тел, то это изменение мгновенно скажется на другом теле, как бы далеко оно ни находилось. На самом деле скорость распространения взаимодействий конечная; она не может превзойти скорость света в вакууме. Поэтому третий закон Ньютона имеет определённые пределы применимости. Однако в классической механике при малых скоростях взаимодействующих тел он выполняется с большой точностью.
Второй закон Ньютона (уравнение движения) можно представить в виде теоремы об изменении импульса материальной точки:
`(Delta vec p)/(Delta t) = vec(F)` (3)
Скорость изменения импульса материальной точки в инерциальной системе отсчёта равна сумме сил, действующих на эту точку.
Напомним, что для решения задач динамики материальной точки следует:
привести «моментальную фотографию» движущегося тела, указать приложенные к нему силы;
выбрать инерциальную систему отсчёта;
составить уравнение (3);
перейти к проекциям приращения импульса и сил на те или иные направления;
решить полученную систему.
Рассмотрим характерные примеры.
К телу, первоначально покоившемуся на шероховатой горизонтальной поверхности, прикладывают в течение времени t1=10 сt_1=10;mathrm с горизонтальную силу величиной F=5 HF=5;mathrm H. После прекращения действия силы тело движется до остановки t2=40 ct_2=40;mathrm c. Определите величину $$ {F}_{mathrm{тр}}$$ силы трения скольжения, считая её постоянной.
На рис. 1 показаны ИСО и силы, действующие на тело в процессе разгона. По второму закону Ньютона
`(Delta vec p)/(Delta t) = M vec g + vec N + vecF_(«тр») + vec F`.
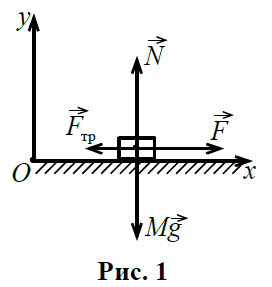
Переходя к проекциям на горизонтальную ось, находим элементарные приращения импульса в процессе разгона
$$ ∆{p}_{x}=left(F-{F}_{mathrm{тр}}right)∆t$$
и в процессе торможения `(F = 0)`
$$ ∆{p}_{x}=-{F}_{mathrm{тр}}∆t$$.
Просуммируем все приращения импульса тела от старта до остановки:
`sum Delta p_x = sum_(0 <= t <= t_1) (F — F_sf»тр») Delta t + sum_(t_1 <= t <= t_1 + t_2) (-F_sf»тр» ) Delta t`.
Напомним, что для любой физической величины сумма приращений равна разности конечного и начального значений. Тогда
px конечн-px начальн=F-Fтрt1+-Fтрt2p_{x;mathrm{конечн}}-p_{x;mathrm{начальн}}=left(F-F_mathrm{тр}right)t_1+left(-F_mathrm{тр}right)t_2.
С учётом равенств px конеч=0p_{x;mathrm{конеч}}=0, px начальн=0p_{x;mathrm{начальн}}=0 и независимости сил от времени приходим к ответу на вопрос задачи:
Fтр=t1t1+t2F=1010+40·5=1 HF_mathrm{тр}=dfrac{t_1}{t_1+t_2}F=dfrac{10}{10+40}cdot5=1;mathrm H.
Далее рассмотрим пример, в котором одна из сил зависит от времени.
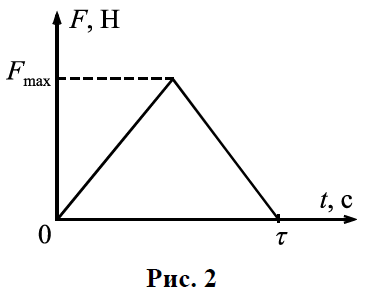
На какое максимальное расстояние `L_max` улетит мяч, если в процессе удара футболист действует на мяч постоянной по направлению силой, величина которой изменяется по закону, представленному на рис. 2. Длительность удара τ=8·10-3 ctau=8cdot10^{-3};mathrm c, максимальная сила Fmax=3,5·103 HF_max=3,5cdot10^3;mathrm H, масса мяча m=0,5 кгm=0,5;mathrm{кг}. Здесь и далее ускорение свободного падения g=10 м/с2g=10;mathrm м/mathrm с^2. Сопротивление воздуха не учитывайте.
В процессе удара на мяч действуют две силы: mg=0,5·10=5 Hmg=0,5cdot10=5;mathrm H — тяжести и сила `vec F`, с которой футболист действует на мяч,
F≤Fmax=3,5·103 HFleq F_max=3,5cdot10^3;mathrm H.
Так как `mg < < F_max`, силой тяжести пренебрежём. Из кинематики известно, что максимальная дальность полёта наблюдается при старте под углом `alpha = pi/4`. Процесс удара показан на рис. 3.

По второму закону Ньютона приращение импульса равно импульсу силы `Delta vec p = vec F * Delta t`. Переходя к проекциям приращения импульса и силы на ось `Ox`, получаем
`Delta p_x = F Delta t`.
Просуммируем элементарные приращения импульса мяча за время удара
`sum Delta p_x = mv — 0 = sum_(0 <= t <= tau) F Delta t`.
Импульс силы `sum_(0 <= t <= tau) F(t) Delta t` за время удара численно равен площади под графиком зависимости этой силы от времени (каждое слагаемое `F(t) Delta t` в импульсе силы можно интерпретировать как площадь элементарного прямоугольника со сторонами `F(t)` и `Delta t` на графике зависимости `F(t)`). Тогда импульс силы `F` за время удара равен
`sum_(0 <= t <= tau) F Delta t = (F_max tau)/2`
и в рассматриваемом случае не зависит от того, в какой именно момент времени сила достигает максимального значения (площадь треугольника равна половине произведения основания на высоту!). Далее находим импульс мяча в момент окончания действия силы
`mv = 1/2 F_max * tau`.
Отсюда находим начальную скорость полёта мяча
`v = (F_max * tau)/(2m) = (3,5 * 10^3 * 8 * 10^-3)/(2 * 0,5) = 28 sf»м/с»`
и максимальную дальность (старт под углом `alpha = pi/4`) полёта
`L_max = (v^2)/g = (28^2)/(10) ~~ 78 sf»м»`.
В рассматриваемом модельном примере получен несколько завышенный по сравнению с наблюдениями результат.
На вступительных испытаниях и олимпиадах в вузах России регулярно предлагаются задачи динамики, в которых наряду с «традиционными» силами: силой тяжести, силой Архимеда и т. д., на тело действует сила лобового сопротивления. Такая сила возникает, например, при движении тел в жидкостях и газах. Вопрос о движении тел в жидкостях и газах имеет большое практическое значение. Знакомство с действием такого рода сил уместно начинать, как это принято в физике, с простейших модельных зависимостей, в которых сила сопротивления принимается пропорциональной скорости или её квадрату.
Мяч, брошенный с горизонтальной поверхности земли под углом `alpha = 60^@` к горизонту со скоростью `v = 10 sf»м/с»`, упал на землю, имея вертикальную составляющую скорости по абсолютной величине на `delta = 30 %` меньшую, чем при бросании. Найдите время полёта мяча. Считать, что сила сопротивления движению мяча пропорциональна его скорости.
Согласно второму закону Ньютона приращение импульса пропорционально силе и происходит по направлению силы:
`m * Delta vec v = (m vec g — k vec v) * Delta t`.
Переходя к проекциям сил и приращения скорости на вертикальную ось, получаем
`m * Delta v_y = — mg * Delta t — k * v_y * Delta t`.
Заметим, что элементарное перемещение мяча по вертикали равно `Delta y = v_y * Delta t`, и перепишем последнее соотношение в виде:
`m * Delta v_y = — mg * Delta t — k * Delta y`.
Просуммируем все приращения вертикальной проекции импульса по всему времени полёта, т. е. от `t = 0` до `t = T`:
`m * (sum Delta v_y) = — mg * (sum Delta t) — k* (sum Delta y)`.
Переходя к конечным приращениям, получаем
`m (v_y (T) — v_y (0)) = — mg (T — 0) — k (y (T) — y (0))`.
Точки старта и финиша находятся в одной горизонтальной плоскости, поэтому перемещение мяча по вертикали за время полёта нулевое
`y (T) — y (0) = 0`.
Тогда `- (1 — delta) mv_0 sin alpha — mv_0 sin alpha = — mgT`. Отсюда находим продолжительность полёта мяча:
`T = (v_0 sin alpha)/(g) (2 — delta) = (10 * sin 60^@)/(10) (2,0 — 0,3) ~~ 1,5 sf»с»`.
В следующем примере рассматривается удар, в ходе которого две очень большие силы, «согласованно» действуют во взаимно перпендикулярных направлениях.
Кубик, движущийся поступательно со скоростью `v` (рис. 4) по гладкой горизонтальной поверхности, испытывает соударение с шероховатой вертикальной стенкой.
Коэффициент трения `mu` скольжения кубика по стенке и угол `alpha` известны. Одна из граней кубика параллельна стенке. Под каким углом `beta` кубик отскочит от стенки? Считайте, что перпендикулярная стенке составляющая скорости кубика в результате соударения не изменяется по величине.
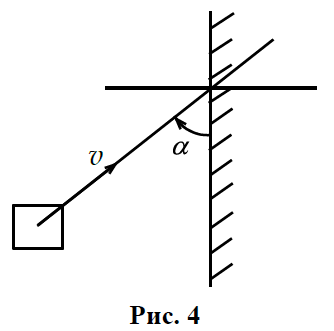
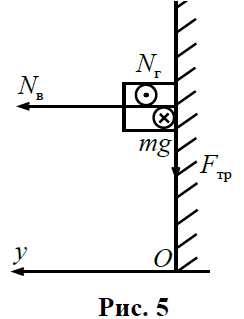
Силы, действующие на кубик в процессе соударения, показаны на рис. 5.
По второму закону Ньютона
`Delta vec p = (m vec g + vecN_(«г») + vecF_(«тр») + vecN_(«в») ) * Delta t`.
Переходя к проекциям на горизонтальные оси `Ox` и `Oy`, получаем
`Delta p_x = — F_sf»тр» Delta t`, `Delta p_y = N_sf»в» Delta t`.
Просуммируем приращения `Delta p_y = N_sf»в» Delta t` по всему времени `tau` соударения, получим:
`sum Delta p_y = p_y (tau) — p_y (0) = mv sin alpha — (- mv sin alpha) = sum_(0 <= t <= tau) N_sf»в» Delta t`.
В процессе удара в любой момент времени `F_sf»тр» = mu N_sf»в»`, следовательно, во столько же раз отличаются импульсы этих сил за время соударения
`sum_(0 <= t <= tau) F_sf»тр» Delta t = mu sum_(0 <= t <= tau) N_sf»в» Delta t = mu 2 mv sin alpha`.
Тогда легко вычислить проекцию `v_x (tau)` скорости кубика после соударения. Для этого просуммируем приращения
`Delta p_x = — F_sf»тр» Delta t = — mu N_sf»в» Delta t`
по всему времени `tau` соударения, получим:
`sum Delta p_x = p_x (tau) — p_x (0) = mv_x (tau) — mv cos alpha = — sum _(0 <= t<= tau) F_sf»тр» Delta t =- mu 2 mv sin alpha`.
Отсюда `v_x (tau) = v (cos alpha — 2 mu sin alpha)`. Далее, считая `v_x (tau) > 0`, получаем
`bbb»tg» beta = (v_y (tau))/(v_x (tau)) = (sin alpha)/(cos alpha — 2 mu sin alpha)`.
Импульс. Работа. Энергия
Введение
Решение механических задач часто облегчается
применением законов изменения и сохранения импульса и энергии тела или системы
тел. Особенно эффективным является применение этих законов в случаях, когда
действующие на тела силы или ускорения тел переменны во времени и
непосредственное решение уравнений динамики с помощью методов «школьной»
математики затруднительно (или вовсе невозможно).
Напомним, что импульсом тела (материальной точки)
массы  , движущегося со скоростью
, движущегося со скоростью  называется
называется
векторная физическая величина  , равная произведению массы тела на
, равная произведению массы тела на
его скорость:  .
.
Приращение 
импульса тела за малый промежуток времени  равно импульсу
равно импульсу
силы  , действующей на тело,
, действующей на тело,  (*)
(*)
Если на тело действуют несколько сил, то под надо понимать их равнодействующую.
Если сила постоянна (не изменяется во времени), то по указанной
формуле можно определить приращение импульса тела за любой, уже необязательно
малый, промежуток времени  :
:
 .
.
Напомним
также, что здесь и далее, если специально не оговорено обратное, под телом или
системой тел мы понимаем материальную точку или систему материальных точек
соответственно, а модуль векторной величины обозначаем той же буквой, что и
саму величину, но без стрелки над ней. Кроме того, все понятия, законы и
явления, рассматриваемые здесь, мы будем, как и прежде, излагать в инерциальных
системах отсчёта.
В начало
§1. Импульс системы тел и его изменение.
Определение 1.
Импульсом системы тел
называется векторная сумма импульсов отдельных тел, составляющих
эту систему: 
Рассмотрим
систему тел, взаимодействующих друг с другом и с внешними телами. Для простоты
ограничимся системой из трёх тел (рис. 2). Пусть  ,
,  и
и 
— внешние силы, действующие соответственно на первое, второе и
третье тела системы со стороны внешних тел (тел, не входящих в рассматриваемую
систему). Пусть далее  — сила, действующая на первое тело со
— сила, действующая на первое тело со
стороны второго,  —
—
сила, действующая на первое тело со стороны третьего. Аналогично определим
силы  ,
,  ,
,  и
и  . Вообще
. Вообще  — сила,
— сила,
действующая на  -е тело со стороны
-е тело со стороны  -го.
-го.
Применяя
закон изменения импульса (*) для каждого тела системы, запишем уравнения:
Складывая
эти уравнения почленно и частично группируя слагаемые, стоящие в правых частях
уравнений, получим

По
третьему закону Ньютона для сил взаимодействия тел системы имеем:
 ,
,
 ,
,
и, следовательно,
 .
.
Тогда
имеем: ,
,
где  — сумма внешних
— сумма внешних
сил, действующих на систему,
 — конечный импульс
— конечный импульс
системы тел (по определению),
 — начальный импульс
— начальный импульс
системы тел (по определению).
Обозначив разность 
через , получим окончательно
(1)
Аналогичные рассуждения можно
провести для систем, состоящих из произвольного количества тел, и убедиться в
справедливости (1) в каждом случае.
Таким образом, приращение
импульса системы тел равно импульсу суммы всех внешних сил, действующих на
систему.
Мы видим, что изменение импульса
системы тел обусловлено действием только внешних сил (т.е. сил,
действующих со стороны тел, не входящих в систему), а внутренние силы, какой
бы природы они ни были, импульс системы изменить не могут.
Кроме того, приращение импульса
системы тел сонаправлено с вектором суммарной внешней силы .
ПРИМЕР 2.
Два груза массами  и
и  , соединённые лёгкой упругой пружиной, висят на нити (рис. 3а).
, соединённые лёгкой упругой пружиной, висят на нити (рис. 3а).
В некоторый момент нить аккуратно перерезают. Чему равно приращение импульса
системы тел «грузы + пружина» за время после перерезания нити?
Сопротивлением воздуха пренебречь.

РЕШЕНИЕ. После
перерезания нити указанная система тел начинает свободно падать. Силы
взаимодействия грузов и пружины являются для рассматриваемой системы
внутренними силами и импульс системы изменить не могут. На грузы также действуют
силы тяжести со стороны Земли (рис. 3б), которые для системы являются внешними
(т.к. Земля в рассматриваемую систему не входит и, следовательно, является
внешним телом). Силой тяжести пружины пренебрегаем, т.к. по условию пружина
лёгкая (т.е. её массу можно считать равной нулю).
В соответствии с (1) для
приращения импульса системы тел можно записать

Таким образом
вектор равен по модулю  и направлен
и направлен
вертикально вниз (в сторону суммарной силы тяжести).
В начало
§2. Законы сохранения импульса тела и системы тел.
Сказанное позволяет
сформулировать законы сохранения импульса тела и системы тел. Действительно, в
случаях, когда правые части уравнений (*) и (1) можно считать равными нулю, то
и приращения импульса тела и импульса системы тел соответственно будут также
равны нулю. Это означает, что в таких случаях указанные импульсы будут
оставаться неизменными, то есть сохраняться.
Закон сохранения импульса тела:
импульс тела сохраняется, если импульс равнодействующей всех сил,
действующих на это тело, равен нулю. Это возможно в случаях, когда
- на тело не действуют силы вообще или
- равнодействующая всех сил, действующих на тело, равна нулю, или
- промежуток времени
 , в течение которого мы наблюдаем за состоянием тела, очень
, в течение которого мы наблюдаем за состоянием тела, очень
мал (стремится к нулю), а равнодействующая всех сил, действующих
на тело, ограничена по модулю (не бесконечно большая).
 ), а равнодействующая всех сил, действующих
), а равнодействующая всех сил, действующихВ первом пункте
сформулированного закона речь идёт о так называемом свободном теле,
которое будет покоиться или двигаться по инерции до тех пор, пока воздействия
со стороны других тел не выведут его из этого состояния (вспомните 1-й закон
Ньютона). Второй пункт представляется очевидным, а ограничение модуля
равнодействующей в третьем пункте необходимо для того, чтобы исключить случаи
возникновения математической неопределённости произведения бесконечно больших и
бесконечно малых величин (неопределённости типа  ).
).
ПРИМЕР 3.
Снаряд, летящий
в воздухе, разрывается на несколько осколков. Сохраняется ли при взрыве импульс
снаряда?
ОТВЕТ. Да, сохраняется.
Действительно, на снаряд действуют сила тяжести со стороны Земли и сила
сопротивления воздуха. Модули обеих сил имеют конкретные значения, зависящие от
массы снаряда (для силы тяжести) и от скорости снаряда относительно воздуха
(для силы сопротивления). Эти значения ограничены по величине. Следовательно, и
равнодействующая этих сил ограничена по модулю. В свою очередь время взрыва
мало (взрыв происходит «мгновенно»). Таким образом импульс снаряда при взрыве
сохраняется.
Здесь полезно заметить, что в
соответствии с определением 1 под импульсом снаряда после взрыва следует понимать
суммарный импульс образовавшихся при взрыве осколков.
Закон сохранения импульса системы тел:
импульс системы тел сохраняется при любых взаимодействиях
тел системы, если импульс суммы всех внешних сил, действующих на
систему, равен нулю. Это возможно в случаях, когда
- внешние силы на систему не действуют (т.е. тела системы взаимодействуют только между собой) или
- внешние силы на систему действуют, но их сумма равна нулю (силы взаимно уравновешиваются), или
- промежуток времени , в течение которого мы наблюдаем за состоянием системы,
очень мал (стремится к нулю), а суммарная внешняя сила
ограничена по модулю (не бесконечно большая).
Здесь в первом пункте речь идёт
о системах, не взаимодействующих с внешними телами. Такие системы называются замкнутыми
или изолированными. Конечно, это идеализация. В реальности у тел системы
всегда будет присутствовать взаимодействие с другими телами, не входящими в
систему. Однако если это взаимодействие не оказывает сколь-нибудь заметного
влияния на состояние системы, то такую систему тел в большинстве случаев можно
считать замкнутой.
Второй пункт представляется
очевидным, а в третьем пункте, как и ранее, ограничение на модуль суммы внешних
сил наложено с целью избежать неопределённости типа .
ПРИМЕР 4.
Человек массой находится на узком плоту массой  , который покоится на
, который покоится на
поверхности озера. Человек совершил вдоль плота перемещение  относительно плота и
относительно плота и
остановился. Сопротивление воды пренебрежимо мало. Чему при этом будет равно
соответствующее перемещение  плота относительно берега?
плота относительно берега?
РЕШЕНИЕ. На плот
действуют сила тяжести, сила Архимеда и вес человека. На человека действует
сила тяжести и сила реакции плота. Рассматривая систему тел «человек + плот»,
видим, что вес человека и сила реакции плота являются внутренними силами, силы
тяжести человека и плота и сила Архимеда – внешними. Сумма внешних сил равна
нулю, следовательно импульс системы меняться не будет, оставаясь равным нулю в
процессе движения:  ,
,
где  и
и  —
—
скорости человека и плота относительно берега. Скорость человека относительно
берега можно представить в виде  , где
, где  —
—
скорость человека относительно плота. Исключив из этих уравнений, получим
Умножив обе части на
время перемещения человека по плоту, найдём перемещение плота
относительно берега:  .
.
Знак «минус» показывает, что это
перемещение происходит в направлении, противоположном направлению перемещения
человека относительно плота.
У незамкнутой системы сам
импульс может не сохраняться, но может сохраняться его
проекция  на некоторое направление ОX. Это бывает, когда
на некоторое направление ОX. Это бывает, когда
- внешние силы, действующие на систему, направлены перпендикулярно оси Ох или
- алгебраическая сумма проекций на ось Ох всех внешних сил, действующих на систему равна нулю, или
- промежуток времени , в течение которого мы наблюдаем за состоянием системы,
очень мал (стремится к нулю), а алгебраическая сумма
проекций на ось ОX всех внешних сил, действующих на тело, ограничена по модулю
(не бесконечно большая).
 ), а алгебраическая сумма
), а алгебраическая сумма
ПРИМЕР 6.
Кузнечик
массой сидит на конце соломинки длиной  , которая лежит на
, которая лежит на
гладком горизонтальном полу. Кузнечик прыгает и попадает на другой конец
соломинки (рис. 4а). С какой минимальной начальной скоростью относительно пола
он должен прыгать, если масса соломинки ? Сопротивлением воздуха
пренебречь.

РЕШЕНИЕ. Направим ось 0Y
вертикально вверх, а ось 0X – горизонтально вдоль соломинки по
направлению прыжка кузнечика (рис. 4б). Обозначим начальную скорость кузнечика
относительно пола через  , а угол, который она составляет с
, а угол, который она составляет с
горизонтом через  . Проекции этой скорости на координатные оси
. Проекции этой скорости на координатные оси
соответственно равны  и
и  .
.
Рассмотрим систему «кузнечик +
соломинка». На тела системы внешние силы действуют лишь вдоль вертикального
направления, то есть направлены перпендикулярно оси 0X. Отсюда следует,
что проекция на ось 0X импульса системы сохраняется и остаётся равной
нулю. Тогда можно записать:  , где
, где  — проекция на ось
— проекция на ось
0х скорости ,
которую приобрела соломинка относительно пола сразу после прыжка
кузнечика. Отсюда видно, что  . Знак «минус» указывает, что
. Знак «минус» указывает, что
соломинка получает скорость, направленную противоположно оси 0х, а
модуль скорости равен  .
.
Заметим, что в направлении оси 0Y
проекция импульса системы не сохраняется, так как в момент отрыва кузнечика от
соломинки у него появляется проекция скорости  , которой до этого не
, которой до этого не
было. Следовательно, возникает проекция  импульса системы на ось 0Y,
импульса системы на ось 0Y,
равная  . В дальнейшем при «полёте» кузнечика значение
. В дальнейшем при «полёте» кузнечика значение
изменяется из-за действия силы тяжести.
Далее по
формулам кинематики время полёта кузнечика равно  , а
, а
дальность прыжка кузнечика (вдоль оси 0х)  .
.
За время tau
соломинка переместится по полу на расстояние  в сторону,
в сторону,
противоположную оси 0х (рис. 4б). Чтобы кузнечик «не промахнулся» и точно
попал на другой конец соломинки, очевидно должно выполняться условие: 
С учётом выражений для  ,
, и имеем
и имеем

Откуда находим
Видим, что модуль скорости
кузнечика относительно пола минимален, когда максимален знаменатель дроби
полученного выражения. Как известно, максимальное значение синуса равно 1. Итак
 ,
,  и
и  .
.
В начало
§3. Центр масс системы тел
Часто при решении задач бывает
удобно воспользоваться понятием центра масс системы тел.
Определение 2.
Центром
масс системы тел называется точка С, радиус-вектор которой
определяется по формуле
 (2)
(2)
Здесь  — масса -го
— масса -го
тела системы,  — суммарная масса системы
— суммарная масса системы
тел,  — радиус-вектор центра масс (рис.5),
— радиус-вектор центра масс (рис.5),  —
—
радиус-вектор -го тела системы.

Аналогично определяется центр
масс тела в случаях, когда при решении задачи это тело нельзя считать
материальной точкой. Тогда обычно поступаю так. Мысленно «разбивают» тело на
множество сколь угодно малых частей, каждую из которых уже можно считать
материальной точкой, и рассматривают данное тело как систему из полученных
материальных точек. При этом в определении центра масс под величиной
надо понимать массу всего тела, которая, естественно, равна сумме масс его
частей.
Можно показать, что
- положение точки С относительно тела не зависит от выбора начала отсчёта
системы координат, - центр масс однородного центральносимметричного тела совпадает с его
центром симметрии, - центр масс однородного осесимметричного тела лежит на оси симметрии
тела, - в однородном поле тяжести (например вблизи поверхности Земли) центр масс
тела совпадает с его центром тяжести, - иногда при решении задач можно мысленно сосредоточить в центре масс всю
массу тела и, считая тело материальной точкой, применять законы механики для
материальной точки.
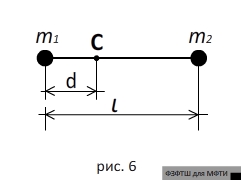
Полезно также знать, что центр
масс треугольной пластины постоянной пренебрежимо малой толщины лежит на
пересечении медиан соответствующего треугольника, а центр масс системы двух
материальных точек массами и (рис.6) располагается на отрезке, их соединяющем, в точке
С, отстоящей от на расстояние  , где — длина соединяющего материальные точки отрезка. В этом легко
, где — длина соединяющего материальные точки отрезка. В этом легко
убедиться, напрямую воспользовавшись приведённым выше определением центра
масс.
Для нахождения центра масс
системы нескольких тел, которые нельзя считать материальными точками, можно,
следуя описанной выше процедуре, найти центры масс каждого из тел, а затем
заменить тела материальными точками, сосредоточив массы тел в их центрах масс,
и найти центр масс системы этих материальных точек.
ПРИМЕР 7.
На столе лежат
постоянной толщины плоский диск массой  и треугольная пластина
и треугольная пластина
массой  (рис. 7а). Расстояние между геометрическим
(рис. 7а). Расстояние между геометрическим
центром  диска и точкой
диска и точкой  пересечения медиан треугольной пластины
пересечения медиан треугольной пластины
равно  . На каком расстоянии от центра диска
. На каком расстоянии от центра диска
находится центр масс данной системы тел?
РЕШЕНИЕ. Центры масс
диска и треугольной пластины находятся в точках и соответственно. Центр масс такой системы
совпадает с центром масс системы материальных точек с массами и , помещённых в точки
и (рис. 7б).
Пусть  ,
, 
и — радиус-векторы точек , и  соответственно.
соответственно.
Тогда положения этих точкек относительно точки характеризуется
радиус-векторами


После подстановки в эти
равенства согласно (2) выражения 
получим:
Отсюда следует, что векторы  и
и 
коллинеарны и противоположно направлены (  ), следовательно
), следовательно
точка лежит на прямой, проходящей через материальные точки
и . Кроме того, модули этих векторов, то есть
расстояния  и
и  обратно
обратно
пропорциональны массам соответствующих материальных точек: 
Отсюда, учитывая,
что  , находим искомое расстояние от
, находим искомое расстояние от
центра диска до центра масс данной системы: 

В начало
§4. Теорема о движении центра масс
По определению 2 радиус-вектор центра масс С системы тел в произвольный момент
времени  задаётся уравнением:
задаётся уравнением:  , где
, где  — масса системы (сумма масс тел
— масса системы (сумма масс тел
системы).
Через малый промежуток
времени  радиус-вектор этой точки будет равен
радиус-вектор этой точки будет равен  . Вычитая из второго уравнения
. Вычитая из второго уравнения
первое, получим 
Если умножить обе части
уравнения на , то оно примет вид  .
.
Разделим обе части на малую, но
всё же отличную от нуля, величину  :
: 
Учитывая,
что  — скорость -го тела (материальной точки) системы,
— скорость -го тела (материальной точки) системы,
а  — скорость точки С (центра масс системы), имеем:
— скорость точки С (центра масс системы), имеем:
В правой части полученного
уравнения стоит импульс рассматриваемой системы тел (по определению). Таким
образом мы получили, что импульс системы тел равен произведению массы
системы на скорость её центра масс: 
Рассуждая аналогичным образом,
получим, что приращение импульса системы тел за малый промежуток
времени  равно произведению массы системы на приращение скорости центра
равно произведению массы системы на приращение скорости центра
масс: 
Учитывая уравнение (1), можно
записать  , где — векторная сумма всех внешних сил,
, где — векторная сумма всех внешних сил,
действующих на систему.
Разделив обе
части (3’) на  и учитывая, что величина
и учитывая, что величина  равна ускорению
равна ускорению
точки С, получим  .
.
Таким образом можно
сформулировать теорему о движении центра масс:
в инерциальной системе
отсчёта центр масс системы тел (материальных точек) движется так, как двигалось
бы тело (материальная точка), масса которого равна массе системы, под действием
силы, равной сумме всех внешних сил, действующих на систему.
Иногда эту теорему называют
вторым законом Ньютона для системы тел.
Рассмотрим применение теоремы о
движении центра масс на практике. В частности покажем, как можно
иначе решить задачу с человеком на плоту (см. Пример 4), если воспользоваться
понятием центра масс и указанной теоремой.
ПРИМЕР 8.
Человек
массой находится на узком плоту массой , который покоится на
поверхности озера. Человек совершил вдоль плота перемещение  относительно плота и
относительно плота и
остановился. Сопротивление воды пренебрежимо мало. Чему при этом будет равно
соответствующее перемещение  плота относительно берега?
плота относительно берега?
РЕШЕНИЕ. Так как
сопротивление воды пренебрежимо мало, то сумма всех внешних сил, действующих на
систему «человек + плот» равна нулю. По теореме о движении центра масс это
означает, что ускорение центра масс данной системы равно нулю, и,
следовательно, положение центра масс системы в процессе движения человека (и
плота) меняться не будет (т.к. в начальный момент по условию плот и человек
покоились). Тогда в соответствии с (2) имеем:  ,
,
где  и
и  — радиус-векторы, характеризующие
— радиус-векторы, характеризующие
положения центров масс человека и плота относительно некоторой точки берега. Из
этого равенства найдём связь между приращениями векторов  и за
и за
промежуток времени : 
Имея в виду, что приращения 
и  представляют собой перемещения человека и плота соответственно
представляют собой перемещения человека и плота соответственно
относительно берега, причём  , найдём
, найдём
перемещение плота 
ПРИМЕР 9.
Однородный
стержень длины нижним концом касается гладкой горизонтальной
поверхности. Верхний конец стержня подвешен на нити так, что стержень образует
с горизонтальной плоскостью угол (рис. 8а). Нить пережигают. В какую
сторону и на сколько сместится нижний конец стержня, когда он упадёт?
РЕШЕНИЕ. Так как в
горизонтальном направлении на стержень никакие силы не действуют, то его центр
масс будет двигаться вертикально вниз, как материальная точка, масса которой
равна массе стержня, падающая без начальной скорости.
Центр масс однородного стержня
находится посередине стержня на расстоянии  от любого из его
от любого из его
концов. С учётом этого в момент падения нижний конец стержня сместится влево на
расстояние  (рис. 8б), равное
(рис. 8б), равное


ПРИМЕР 10.
Человек
прыгает с вышки в воду с начальной скоростью, составляющей некоторый угол с
горизонталью. Движение прыгуна в общем случае имеет весьма сложный характер.
Однако если сопротивление воздуха пренебрежимо мало, то можно сразу утверждать,
что центр масс прыгуна движется по параболе, как материальная точка, на которую
действует постоянная сила тяжести  , где — масса человека.
, где — масса человека.
При доказательстве теоремы о
движении центра масс было получено важное утверждение, записанное в виде
уравнения (3). С его помощью, зная массу системы тел и скорость её центра масс,
можно установить, чему равен импульс системы, не складывая импульсы отдельных
тел системы.
ПРИМЕР 11.
Однородный
обруч массы вращается вокруг оси, перпендикулярной плоскости обруча и
проходящей через его геометрический центр. Чему равен импульс обруча, если ось
вращения неподвижна?
ОТВЕТ. Центр масс
однородного обруча находится в его геометрическом центре. Эта точка по условию
неподвижна, т.е. скорость центра масс обруча равна нулю  .
.
Таким образом импульс обруча равен нулю:  .
.

ПРИМЕР 12.
С
горизонтальной поверхности земли бросили под углом  к горизонту со
к горизонту со
скоростью  комок сырой глины. Одновременно комок вдвое
комок сырой глины. Одновременно комок вдвое
большей массы бросили с поверхности земли под углом  к горизонту,
к горизонту,
причём начальные скорости комков оказались лежащими в одной вертикальной
плоскости (рис. 9а). В результате столкновения комки слиплись. Найдите скорость
(по модулю) упавшего на землю слипшегося комка. (МФТИ, 1984 г.)
РЕШЕНИЕ. Направим оси
прямоугольной декартовой системы координат, как показано на рис. 9б. Начало
отсчёта поместим в току бросания первого комка. Пренебрегая сопротивлением
воздуха, для координат по оси 0у комков в произвольный момент времени
полёта можно записать:
В момент  столкновения комков в
столкновения комков в
полёте их координаты сравниваются  , следовательно
, следовательно

Отсюда получаем, что 
Центр масс системы, состоящей из
двух рассматриваемых комков, по теореме о движении центра масс будет двигаться
аналогично телу, брошенному под углом к горизонту. Тогда скорость слипшегося
комка непосредственно перед ударом о землю (искомая скорость) равна по модулю
скорости центра масс системы комков в момент бросания. Обозначим эту скорость
через и запишем уравнение (3) в проекциях на оси координат. Учитывая
Определение 1, получим:
где  и
и  — проекции скорости центра масс
— проекции скорости центра масс
системы комков на соответствующие оси координат, — масса первого
комка. По условию масса второго комка равна  . Отсюда
. Отсюда

Далее, учитывая полученное выше выражение,
связывающее и  , найдём окончательно
, найдём окончательно

В начало
§5. Работа силы. Мощность силы.
Изменение импульса тела (или
системы тел) характеризует действие суммарной силы (или суммы внешних сил) в
течение конкретного промежутка времени. Для характеристики действия силы на
некотором перемещении служит физическая величина, называемая механической
работой.
Пусть на прямолинейно движущееся
тело действует постоянная сила . И пусть за время тело
совершило перемещение  (рис. 11).
(рис. 11).
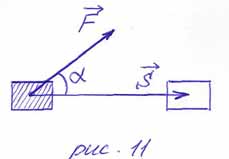
Определение 3.
Работой
постоянной силы на прямолинейном участке траектории называется
величина, равная скалярному произведению вектора силы на вектор
перемещения тела:  (4)
(4)
Согласно определению скалярного
произведения векторов  , где
, где  — угол
— угол
между векторами и . Тогда можно записать:
 , где
, где  — проекция вектора на
— проекция вектора на
направление вектора , а 
проекция вектора на направление вектора силы .
По определению работы, она
является скалярной величиной и понятие направления, следовательно к работе
неприменимо.
В системе единиц СИ единицей
измерения работы служит джоуль (Дж): ![[A] = H m = кг м/с^2 = Дж](http://mipt-bot.narod.ru/cache/tex/fba4b28e535979387df76e5c511cc54e.png) .
.

Для работы можно дать наглядное
графическое представление. Если отложить по оси абсцисс текущее
положение  тела вдоль оси, совпадающей с прямой, по которой движется
тела вдоль оси, совпадающей с прямой, по которой движется
тело, а по оси ординат – значение проекции  , то в случае,
, то в случае,
когда постоянна, график  будет иметь вид прямой,
будет иметь вид прямой,
параллельной оси абсцисс (рис. 12). Если тело совершает перемещение ,
то работа силы , определяемая произведением  , будет
, будет
численно равна площади прямоугольника со сторонами и .
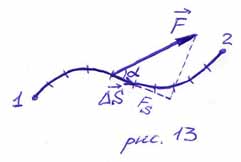
Пусть теперь тело движется по
некоторому, в общем случае криволинейному, участку траектории 1-2
(рис.13). Пусть также на тело действует сила , которая в общем
случае в процессе движения может меняться как по модулю, так и по направлению.
Мысленно разобьём траекторию движения тела на множество малых элементарных участков,
в пределах каждого из которых проекцию силы на направление
перемещения можно считать постоянной (на разных участках –
различной), а сами участки – прямолинейными. Рассмотрим малое
перемещение  на любом одном из таких участков.
на любом одном из таких участков.
Определение 4.
Элементарной
работой  силы на малом перемещении называется
силы на малом перемещении называется
величина, равная скалярному произведению векторов и .
И вновь, как и прежде, можно
написать:

(5)
где — угол между векторами и
, — проекция силы на направление вектора
,  — проекция вектора на направление .
— проекция вектора на направление .
Определение 5.
Работой
силы на всём участке траектории 1-2 называется величина, равная
алгебраической сумме элементарных работ (5), совершаемых этой силой на каждом
из элементарных участков.
Таким образом можно записать:

(6)
где  — элементарная работа силы на
— элементарная работа силы на
-м элементарном участке.
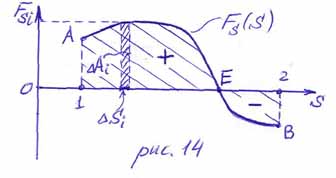
Выражению (6) можно придать
наглядный геометрический смысл. Рассматривая как функцию положения
тела на траектории, т.е. функцию дуговой координаты , изобразим её
график . Пусть, например, этот график имеет вид, представленный на
рис. 14. Элементарная работа будет численно равна площади
заштрихованного «столбика» (прямоугольника со сторонами  и
и  ),
),
а работа на всём участке траектории от точки 1 до
точки 2 будет равна алгебраической сумме площадей таких «столбиков» для
всех элементарных участков, причём площади столбиков над осью 0S
берутся со знаком «плюс» (они соответствуют положительной работе), а площади под осью 0S
– со знаком «минус» (они соответствуют отрицательной
работе). Таким образом работа силы на всём участке траектории равна
разности площадей фигуры 1АЕ над осью абсцисс и фигуры ЕВ2 под
осью абсцисс.
ПРИМЕР 15.
Пружина
жесткости  , прикреплённая одним концом к стене, а другим к грузу,
, прикреплённая одним концом к стене, а другим к грузу,
лежащему на гладком горизонтальном столе, расположена горизонтально и сжата.
Деформация пружины равна . Найти работу, которую совершит сила
упругости по перемещению груза в процессе перехода пружины в недеформированное
состояние (рис. 15а).

РЕШЕНИЕ. В
первоначальном положении, когда пружина сжата на величину , сила
упругости, действующая на груз равна  . Если под действием
. Если под действием
пружины груз переместился на расстояние , то деформация пружины
уменьшилась на величину и соответствующая сила
упругости  стала равна
стала равна  .
.
Построив график
зависимости в соответствии с этим выражением (рис. 15б)
получим отрезок прямой, проходящей через точки с координатами ( ;
;
) и (;), и искомая работа будет равна площади заштрихованного
треугольника: 
В дополнение к сказанному
следует особо отметить, что если та или иная сила совершает работу, это не
означает, что тело движется благодаря именно этой силе. В реальных ситуациях на
тело действуют несколько сил (порой, много), и движение тела обусловлено
совместным действием всех сил. При этом работа отдельных сил как правило
различна. Чтобы в этом убедиться, достаточно вернуться к Примеру 14. Однако
часто бывает нужно знать общую работу всех (либо части сил), действующих на
тело. Тогда в общем случае для  сил их общая работа равна алгебраической
сил их общая работа равна алгебраической
сумме механических работ каждой из сил в отдельности:

И ещё. Если мы имеем дело не с
материальной точкой, а с твёрдым телом или системой тел, то данные выше
определения 3 и 4 остаются справедливыми, но в этом случае надо только иметь в
виду, что под и надо понимать соответствующие перемещения
точки приложения силы. Игнорирование этого обстоятельства зачастую приводит
к ошибочным результатам.
Пусть за промежуток
времени  сила , приложенная к телу, совершает
сила , приложенная к телу, совершает
работу  .
.
Определение 6.
Средней мощностью
 , развиваемой силой за промежуток
, развиваемой силой за промежуток
времени , называется величина равная
 (7)
(7)
С учётом (5) можно записать

Устремляя в полученном равенстве
величину к нулю (  ), получим вместо
), получим вместо 
мгновенную скорость  тела (скорость тела в данный момент времни).
тела (скорость тела в данный момент времни).
Определение 7.
Мгновенной
мощностью силы называется величина, равная скалярному
произведению вектора силы и вектора мгновенной скорости
тела, к которому приложена эта сила.
 (8)
(8)
При этом характер зависимости
силы  от времени может быть совершенно произвольным.
от времени может быть совершенно произвольным.
Единицей измерения мощности в
системе СИ служит ватт (Вт): ![[N] = frac {[A]}{[{Delta} t]} = [F] [v] = кг м^2/c^2](http://mipt-bot.narod.ru/cache/tex/18eacc97f673a4d0baa53f7665eb8335.png)
Развитие технического прогресса
привело к созданию огромного числа машин и механизмов, действие которых также
принято характеризовать мощностью. В этом случае мощность представляет собой
величину работы, которую совершает или может совершить та или иная машина в
единицу времени. Но с другой стороны в нашем рассмотрении работу совершают
конкретные силы, а не отвлечённые машины и механизмы. В связи с этим при
решении задач во избежание недопонимания надо прежде всего выяснить, какие силы
совершают работу в каждом конкретном случае и лишь затем применять понятие
мощности машины или механизма, понимая под ней суммарную мощность этих сил.
ПРИМЕР 18.
Машина в
течение получаса совершает над телом работу, равную  . Чему
. Чему
равна средняя мощность, развиваемая этой машиной?
РЕШЕНИЕ. Здесь под
мощностью машины понимается суммарная мощность всех сил, действующих на тело со
стороны машины. Эти силы совершают указанную в условию суммарную
работу  в течение промежутка времени
в течение промежутка времени
 .
.
Средняя мощность машины по формуле
(7) равна 
Часто при решении задач,
связанных с работой машин и механизмов, используется понятие полезной мощности,
которая равна  , где
, где  — мощность, которую развивала бы машина
— мощность, которую развивала бы машина
при отсутствии трения в её деталях (полная мощность), а  —
—
часть мощности, необходимая на преодоление сил трения в деталях машины во время
её работы.
Определение 8.
Отношение
полезной мощности  к полной мощности называют
к полной мощности называют
коэффициентом полезного действия 
(сокращённо — КПД) машины или механизма:
 (9)
(9)
КПД принято выражать в процентах
(%), для чего следует домножить выражение (9) справа на 100%.
В начало
§6. Кинетическая энергия
Часто говорят о работе, которую
совершает или может совершить над телом какое-либо другое тело. Здесь, во
избежание недоразумений, надо понимать, что работу над телом совершает сила,
действующая на него со стороны рассматриваемого другого тела.
Способность тела совершать
работу характеризуют с помощью энергии.
Тело может обладать энергией
вследствие
- своего движения (кинетическая энергия),
- взаимодействия с
другими телами или (для системы тел и тела – не материальной точки)
взаимодействия отдельных частей тела между собой (потенциальная энергия - вследствие хаотического движения и взаимодействия молекул внутри тела (внутренняя
энергия).

Пусть на тело
массы действует постоянная сила  и тело движется прямолинейно
и тело движется прямолинейно
с постоянным ускорением  вдоль линии действия силы (рис.17). Пусть
вдоль линии действия силы (рис.17). Пусть
за промежуток времени тело совершило перемещение  , а его
, а его
скорость изменилась от величины до величины . При этом
работа, совершённая силой будет равна  .
.
Или с учётом второго закона Ньютона  . Из
. Из
кинематики известно, что при равноускоренном движении 
Тогда работа будет
равна: 
Определение 9.
Кинетической энергией
 тела называется величина, равная половине
тела называется величина, равная половине
произведения массы тела на квадрат его скорости  :
:
 (10)
(10)
Таким образом можно записать,
что 
Если на тело действуют несколько
сил, тогда в правой части полученного уравнения будет стоять суммарная работа
всех сил на указанном перемещении.
Обобщив сказанное выше, можно
сформулировать
теорему об изменении кинетической энергии тела: приращение
кинетической энергии тела на некотором перемещении равна алгебраической сумме
работ всех сил, действующих на тело на том же перемещении

Это утверждение остаётся
справедливым и в общем случае, когда переменные по величине и направлению силы
действуют на криволинейном участке траектории. Заметим, что кинетическая
энергия является скалярной величиной и в системе СИ измеряется (как и работа) в
джоулях (Дж).
ПРИМЕР 20.
По
горизонтальной поверхности движется небольшой брусок массой  .
.
В некоторый момент времени его кинетическая энергия равна  . Чему равна
. Чему равна
скорость бруска в этот момент?
РЕШЕНИЕ. По определению 9
кинетическая энергия тела равна .
Отсюда 
ПРИМЕР 21.
Пуля
массы , летящая горизонтально, пробивает брусок
массы , лежащий на горизонтальной поверхности стола. При этом
скорость пули уменьшается вдвое (рис. 18а). Чему равна начальная скорость пули,
если брусок продвинулся по столу на расстояние  ? Коэффициент
? Коэффициент
трения бруска о поверхность стола равен  . Движение бруска
. Движение бруска
поступательное.
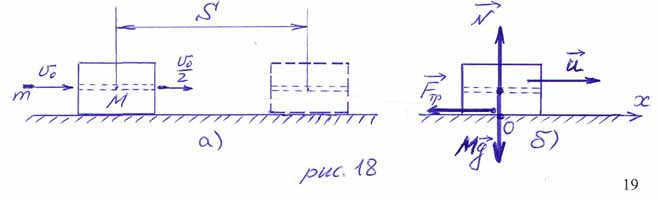
РЕШЕНИЕ.
Пусть  — начальная скорость движения бруска. На брусок действуют
— начальная скорость движения бруска. На брусок действуют
сила трения скольжения со стороны поверхности стола, сила тяжести и сила
нормальной реакции опоры (рис. 18б). На пулю действует сила тяжести. При
пролёте пули через брусок на неё дополнительно действует сила сопротивления
движению со стороны бруска. Такая же по модулю сила действует и на брусок со
стороны пули.
Рассматривая систему тел «пуля +
брусок», видим, что силы взаимодействия пули с бруском являются внутренними.
Остальные силы внешние и ограничены по величине. Кроме того, время пролёта пули
через брусок мало. Таким образом импульс системы за этот промежуток времени
сохраняется. В проекциях на ось 0х имеем: 
При дальнейшем движении бруска
по столу приращение кинетической энергии бруска равно  .
.
Учитывая, что конечная кинетическая энергия  бруска равна нулю (брусок
бруска равна нулю (брусок
остановился), а начальная  , получим:
, получим: 
При движении бруска сила тяжести
и сила нормальной реакции опоры работы не совершают (направлены перпендикулярно
перемещению), а работа силы трения скольжения
равна  . Таким
. Таким
образом по теореме об изменении кинетической
энергии  , то есть
, то есть 
Отсюда получаем, что  ,
,
и после подстановки в уравнение закона сохранения импульса находим начальную
скорость пули: 
Кинетическая энергия системы тел
равна алгебраической сумме кинетических энергий отдельных тел системы.
Для определения кинетической
энергии твёрдого тела (не материальной точки) его следует мысленно разбить на
множество маленьких частей, каждую из которых можно считать материальной
точкой. Тогда кинетическая энергия тела будет равна алгебраической сумме
кинетических энергий этих материальных точек:
(12)
В случае, когда тело (или
система) массы движется поступательно, скорости 
составляющих его (или систему) материальных точек в каждый конкретный момент
времени одинаковы и равны скорости поступательного движения центра
масс тела (или системы). Тогда кинетическая энергия тела (системы) в каждый
момент времени равна 
Очевидно,
что  . Следовательно, кинетическая энергия тела
. Следовательно, кинетическая энергия тела
(системы тел) массой при поступательном движении со
скоростью , равна
Если движение тела (системы) не
поступательное, т.е. присутствует вращение, то для нахождения кинетической
энергии тела (системы) приведённая формула неприменима и следует пользоваться
общей формулой (12)!
Сказанное следует учитывать при
решении задач. При этом следует также иметь в виду, что теорема об изменении
кинетической энергии (11), сформулированная нами для тела, являющегося
материальной точкой, остаётся справедливой и для системы тел, и для тел, не
являющихся материальными точками. При этом под величиной , стоящей в
правой части (11), по-прежнему надо понимать работу всех сил,
действующих на все тела системы. Именно всех сил, как внешних, так и внутренних!
ПРИМЕР 23.
С наклонной
плоскости одновременно без начальных скоростей начинают соскальзывать брусок и
скатываться без проскальзывания обруч. При каком коэффициенте трения скольжения
между бруском и наклонной плоскостью оба тела будут двигаться, не обгоняя друг
друга? Угол наклона плоскости к горизонту равен .
РЕШЕНИЕ. Из динамики
известно, что ускорение  бруска, скользящего по наклонной плоскости
бруска, скользящего по наклонной плоскости
вниз, равно 
Пусть обруч скатывается с наклонной
плоскости в течение времени . За это время его центр масс пройдёт
путь , равный длине наклонной плоскости. Пусть скорость центра масс
обруча в конце этого пути равна . Из кинематики известно, что  ,
,
 (
(  — ускорение центра масс обруча).
— ускорение центра масс обруча).
Приращение кинетической энергии
обруча за время равно .
Поскольку  (по условию), а
(по условию), а  ,
,
то  . С другой стороны по теореме об
. С другой стороны по теореме об
изменении кинетической энергии эта величина равна работе всех сил, действующих на
обруч в течение времени . С учётом этого имеем:  ,
,
где  — работа силы тяжести
— работа силы тяжести
(покажите это самостоятельно). Сила нормальной реакции опоры работы не
совершает, так как направлена перпендикулярно перемещению центра масс обруча.
Работа силы трения также равна нулю, так как обруч катится без проскальзывания
и, следовательно, в каждый момент времени скорость точки касания обруча с
наклонной плоскостью (точки приложения силы трения) равна нулю. Учитывая
кинематические уравнения, найдём 
Тела не будут обгонять друг друга,
если  . Отсюда
. Отсюда 
В начало
§7. Потенциальная энергия
Область пространства, в каждой
точке которой на помещённое туда тело действует некоторая определённая сила,
называется силовым полем.
В формулировке теоремы об
изменении кинетической энергии тела не содержится каких-либо ограничений на
характер действующих сил. Тело может находиться в поле любых сил.
Вместе с тем силы, действующие
на тело, могут различаться по своей природе и свойствам. В механике сложилось,
в частности, разделение сил на консервативные и неконсервативные.
Консервативными
(потенциальными) называются силы, работа которых не зависит о формы
траектории движения тела, а определяется лишь начальным и конечным его
положением.
Такими силами являются, например, сила тяжести и сила упругости пружины.
ПРИМЕР 24.
Небольшое тело
массы может переместиться из точки в точку по
двум горкам различного профиля (рис. 20а). Чему равна работа силы тяжести тела
в обоих случаях? Точки и расположены над поверхностью земли
на высотах  и
и  соответственно.
соответственно.

РЕШЕНИЕ.Рассмотрим
движение тела по траектории  , представляющей собой отрезок АВ.
, представляющей собой отрезок АВ.
Сила тяжести направлена вертикально вниз и составляет некоторый (постоянный)
угол  с отрезком АВ (направлением перемещения тела) (рис.
с отрезком АВ (направлением перемещения тела) (рис.
20б). Пусть длина отрезка АВ равна  .По определению работа силы
.По определению работа силы
тяжести в этом случае будет равна:  .
.
Но  и, следовательно,
и, следовательно, 
В случае движения тела по
траектории II мы имеем дело с двумя отрезками пути АС и СВ(рис.
20в). Пусть отрезок АС составляет угол  с направлением силы
с направлением силы
тяжести. Тогда, положив длину этого отрезка, равной  , для работы силы
, для работы силы
тяжести на этом участке траектории
имеем: 
, где  — высота точки над поверхностью земли. Аналогично, работа
— высота точки над поверхностью земли. Аналогично, работа
силы тяжести на участке ВС длиной 
равна 
, где  — угол между отрезком
— угол между отрезком  и направлением силы тяжести.
и направлением силы тяжести.
Работа силы тяжести на всей траектории II будет равна сумме работ
на каждом из участков траектории,
т.е.  . Таким образом:
. Таким образом: 
Видим, что работы силы тяжести в
обоих случаях равны и не зависят от формы траектории движения тела, а
определяются лишь начальным и конечным положениями тела, а именно – их
высотами и соответственно.
Неконсервативными (непотенциальными)
силами называются силы, работа которых зависит от формы траектории движения
тела (пройденного телом пути).
Неконсервативными являются, например, сила
трения скольжения, силы сопротивления воздуха или жидкости (силы, зависящие от
скорости тела) и т.п.
ПРИМЕР 25.
В условиях
предыдущего примера определите работу силы трения в обоих случаях, если
коэффициенты трения на участках АС и СВ траектории II одинаковы и
равны коэффициенту трения на участке АВ траектории I. Высота точка С над поверхностью земли равна , углы, которые составляют
с горизонтом участки АВ, АС и СВ траекторий I и II
считать известными.

РЕШЕНИЕ. При движении
тела по траектории I (отрезок АВ) работа силы трения скольжения равна
 ,
,
где — длина отрезка АВ, — угол
наклона поверхности горки к горизонту (рис. 21а) . Знак «минус» возник
из-за того, что направление силы трения составляет угол  с направлением
с направлением
движения, а  .
.
Аналогично при движении тела по
траектории II (отрезки АС и СВ) суммарная работа силы трения
будет равна (рис. 21б) 
 ,
,
где и — длина отрезков АС и ВС,
а и — углы, составляемые этими отрезками с горизонтом.
Видим, что  .
.
Работы силы трения определяются длинами путей, пройденных телом, а они в разных
случаях – разные.
В общем случае работа
консервативной силы может быть представлена как убыль некоторой
величины  , которую называют потенциальной энергией тела
, которую называют потенциальной энергией тела
в поле этой консервативной силы:  (13)
(13)
(Убыль величины отличается от приращения этой величины
знаком: )
)
Так в случае с силой тяжести её
работа над телом равна убыли величины  , зависящей от массы тела и от
, зависящей от массы тела и от
высоты, на которой оно находится (см. Пример 24): 
Следовательно, потенциальная
энергия тела массы , находящегося в поле силы тяжести на высоте
равна  .
.
Можно показать, что работа силы
упругости пружины над телом определяется убылью величины  ,
,
зависящей от коэффициента упругости пружины и от её деформации :

Значит, потенциальная энергия
тела в поле упругой силы деформированной пружины
равна  . Заметьте, она не зависит от массы тела и
. Заметьте, она не зависит от массы тела и
определяется только параметрами пружины ( и ). Часто, поэтому, даже саму
величину в обиходе называют
потенциальной энергией пружины (а не тела).
Для работы неконсервативных
сил (трения, сопротивления и др.) равенство (13) несправедливо и понятие
потенциальной энергии тела в поле неконсервативных сил не вводится!
Потенциальная энергия
тела уравнением (13) определяется неоднозначно. К ней можно добавить (или
вычесть) любую постоянную и от этого работа соответствующей
консервативной силы не изменится, так как не изменится разность значений
потенциальной энергии  . Иными словами, остаётся неопределённым нулевой
. Иными словами, остаётся неопределённым нулевой
уровень, от которого «отсчитывается» потенциальная энергия. Например, в
случае с телом, поднятым с поверхности земли на некоторую высоту, нулевым
уровнем можно считать и поверхность земли, и дно расположенного вблизи оврага и
уровень высоты кустарника, растущего вдоль берега оврага и т.п. Следовательно,
при решении задач необходимо сначала выбрать нулевой уровень и затем, сохраняя
его неизменным в процессе решения, отсчитывать от него потенциальную энергию
тела, на которое действует соответствующая консервативная сила.
При определении потенциальной
энергии поднятого над землёй тела в поле силы тяжести за нулевой уровень обычно
принимается поверхность земли.
Для тела, находящегося в поле
силы упругости деформированной пружины, обычно считается, что его потенциальная
энергия равна нулю в положении, когда пружина не деформирована.
Исходя из сказанного,
потенциальную энергию тела, находящегося в поле консервативной силы, можно
определить следующим образом. Выберем положение тела, в котором будем считать
его потенциальную энергию равной нулю (т.е. выберем нулевой уровень). Тогда потенциальной
энергией тела в некоторой произвольной точке поля будем называть величину,
равную работе, которую может совершить консервативная сила над телом, если тело
переместится из этой точки в точку с нулевой потенциальной энергией.
В начало
§8. Закон сохранения механической энергии тела. Столкновения.
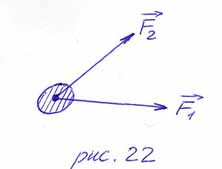
Пусть на тело действуют
несколько сил, например – две, как показано на рис. 22. Пусть, кроме того,
сила  является консервативной, а сила
является консервативной, а сила  — неконсервативная.
— неконсервативная.
Тогда работа силы равна убыли потенциальной энергии
тела: . С другой стороны, согласно теореме об
изменении кинетической энергии, приращение кинетической энергии тела равно
суммарной работе обеих сил:
 ,
,
где  — работа неконсервативной силы .
— работа неконсервативной силы .
Перенесём слагаемые с
потенциальной энергией в левую часть уравнения и сгруппируем их с
соответствующими кинетическими энергиями: 
Определение 10.
Физическую
величину, равную сумме кинетической и потенциальной энергий тела называют механической
энергией тела :
: 
Учитывая это определение в
рассматриваемом случае, имеем:  ,
,
где  и
и  — начальное и конечное значения
— начальное и конечное значения
механической энергии тела соответственно.
В общем случае на тело могут
действовать несколько неконсервативных сил. Тогда в правой части полученного
уравнения будет стоять суммарная работа этих сил. С учётом этого можно
утверждать, что приращение механической энергии
тела равно суммарной работе  всех неконсервативных сил, действующих на
всех неконсервативных сил, действующих на
тело в процессе его движения:  (14)
(14)
Если  , то
, то
механическая энергия тела увеличивается, если  , то –
, то –
уменьшается.
ПРИМЕР 26.
Тело
массы  бросили с начальной скоростью
бросили с начальной скоростью  под углом к
под углом к
горизонту с обрыва высотой  над поверхностью воды в реке. Какую
над поверхностью воды в реке. Какую
работу совершила сила сопротивления воздуха за время полёта тела, если непосредственно
перед падением в воду скорость тела была равна 
РЕШЕНИЕ. В процессе
падения на тело действуют две силы: сила тяжести и сила сопротивления воздуха.
Первая сила консервативная, вторая – нет. Приращение механической энергии тела
за время полёта равно: 
С другой стороны, согласно (14),
это приращение равно искомой работе неконсервативной силы сопротивления
воздуха: 
Подставляя в полученное
уравнение численные значения величин, найдём: 
Интересно, что полученная
величина в общем случае может оказаться не только отрицательной, но и
положительной. Это зависит, например, от наличия и характера ветра в процессе
падения тела.
Среди всевозможных
неконсервативных сил силы трения (сопротивления) совершают, как правило,
отрицательную работу (не всегда!). В этом случае механическая энергия тела в
процессе движения уменьшается. Одновременно, как известно, работа сил трения
производит нагревание трущихся тел. Часть механической энергии тела переходит в
тепловую (внутреннюю) энергию движения молекул, составляющих тела, то есть
выделяется некоторое количество теплоты  . Это количество теплоты
. Это количество теплоты
равно по модулю работе сил трения и, следовательно, убыли механической энергии
тела (при отсутствии иных неконсервативных сил).
Если же неконсервативные силы на
тело не действуют или действуют, но таковы, что их суммарная работа равна нулю,
то и приращение механической энергии равно нулю. Отсюда непосредственно
вытекает закон сохранения механической энергии тела:
Если неконсервативные силы на
тело не действуют или таковы, что не совершают работы в течение интересующего
нас времени, то механическая энергия тела остаётся постоянной за это время:

Заметим, что здесь речь идёт о
сохранении именно суммы кинетической и потенциальной энергии тела. Сами же эти
энергии могут изменяться по отдельности. Однако эти изменения происходят так,
что приращение одной из них в точности равно убыли другой. Иными словами имеют
место взаимные превращения кинетической и потенциальной энергий тела. Энергия
не исчезает и не возникает вновь, она переходит из одного вида в другой.
Потенциальная энергия может переходить в кинетическую (например, при свободном
падении тела), кинетическая – в потенциальную (прогибание батута при прыжках
гимнаста), потенциальная энергия одного вида – в потенциальную энергию другого
(взвешивание на пружинных весах, когда потенциальная энергия груза в поле
тяжести напрямую переходит в потенциальную энергию груза в поле упругих сил).
Во всех этих случаях механическая энергия тела остаётся постоянной.
ПРИМЕР 28.
Лёгкая
пружина жёсткости и длины стоит вертикально на горизонтальной
поверхности стола. С высоты  над столом без начальной скорости на
над столом без начальной скорости на
пружину падает шарик массой (рис. 24). Определите максимальную силу
упругости пружины в процессе взаимодействия с шариком. Сопротивлением воздуха
пренебречь.

РЕШЕНИЕ. При свободном
падении шарика его потенциальная энергия в поле тяжести переходит в
кинетическую энергию движения (скорость шарика увеличивается по мере уменьшения
высоты шарика над столом) вплоть до момента касания шариком пружины. Далее по
мере сжатия пружины кинетическая энергия шарика и его потенциальная энергия в
поле тяжести переходят в потенциальную энергию шарика в поле силы упругости
пружины (сила упругости пружины возрастает за счёт уменьшения скорости шарика и
его высоты над столом). Когда скорость шарика обратится в ноль, сила упругости
достигнет своего максимального значения. Поскольку на шарик в течение всего
времени движения действуют только консервативные силы, то механическая энергия
шарика сохраняется: . Пусть в момент максимального сжатия
. Пусть в момент максимального сжатия
длина пружины равна (рис. 25). Тогда по закону сохранения
механической энергии 

Выразив отсюда , для
максимальной силы упругости пружины получаем:

Таким образом, 
ПРИМЕР 29.
Два груза
массой каждый связаны нитью. Между грузами вставлена лёгкая упругая
пружина, сжатая на величину . Система движется со
скоростью вдоль прямой, перпендикулярной оси системы (рис. 26а).
Нить пережигают и грузы разлетаются под углом  . Найти
. Найти
коэффициент упругости пружины. (МФТИ, 1992 г.)
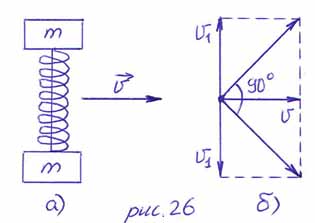
РЕШЕНИЕ. В системе
отсчёта, связанной с центром масс системы и движущейся в ту же сторону со
скоростью , грузы до пережигания нити покоятся, а после пережигания
– разлетаются с одинаковыми скоростями в противоположных
направлениях (по закону сохранения импульса системы тел). Таким образом
потенциальная энергия тел в поле упругих сил переходит в кинетическую энергию
тел. Так как в неподвижной системе отсчёта угол разлёта грузов равен  , то
, то
легко установить (рис. 26б), что  .
.
Пользуясь тем, что на систему
тел не действуют неконсервативные силы, запишем закон сохранения механической
энергии в системе отсчёта, связанной с центром масс: 
Учитывая равенство модулей
скоростей и , отсюда найдём  .
.
Взаимодействия тел, изучаемые в
механике, отличаются большим разнообразием. Одним из частных случаев таких
взаимодействий являются столкновения тел. Среди них выделяют так
называемые упругие и неупругие столкновения. Здесь мы будем называть
столкновения тел, при которых сохраняется суммарная механическая энергия тел, абсолютно
упругими (или просто упругими). Так, например, в большинстве случаев
можно считать абсолютно упругим центральное столкновение гладких стальных
шаров.
Столкновения, при которых
изменяется суммарная механическая энергия взаимодействующих тел, будем называть
неупругими. Изменение механической энергии при таких столкновениях
характеризуется, как правило, её убылью и сопровождается, например, выделением
теплоты. Причём количество выделившейся теплоты в точности равно убыли
суммарной механической энергии сталкивающихся тел. Если тела после столкновения
движутся как единое целое (с одинаковыми по модулю и направлению скоростями),
то такое столкновение будем называть абсолютно неупругим.
Кроме того, если на тела не
действуют внешние силы или они ограничены по модулю, то импульс системы тел при
столкновениях сохраняется, так как время столкновения, как правило, очень мало.
ПРИМЕР 31.
Гладкий шар,
движущийся со скоростью , налетает на такой же покоящийся шар, как
показано на рис. 28а. Определите скорости шаров после упругого столкновения.
РЕШЕНИЕ. Поскольку
скорость первого шара до соударения была направлена не по линии центров шаров,
то столкновение шаров – нецентральное. Направим ось 0х по линии центров
шаров в момент их столкновения. Ось 0у — перпендикулярно к ней (рис.
28б). Систему будем считать замкнутой.
Поскольку шары гладкие, то
покоящийся шар после столкновения полетит только в направлении оси 0х.
Пусть -скорость этого шара, а — скорость первого шара после
столкновения. Пусть проекции скорости на оси координат равны 
и  соответственно (
соответственно (  ). Поскольку
). Поскольку
импульс системы шаров при столкновении сохраняется, то в проекциях на выбранные
оси координат имеем:
Поскольку столкновение упругое,
то суммарная механическая энергия шаров не изменяется: 
Решая полученную систему
уравнений, находим:  ,
,  , (
, ( ,
,  )
)
Из геометрии рисунка 28б
следует,
что 
С учётом этого окончательно имеем:  ,
, 

ПРИМЕР 32.
Шар
массой , движущийся со скоростью , налетает на
покоящийся шар массы . Определить скорости шаров и количество
выделившейся теплоты после центрального абсолютно неупругого столкновения.
РЕШЕНИЕ. Поскольку
столкновение шаров абсолютно неупругое, то после него шары будут двигаться как
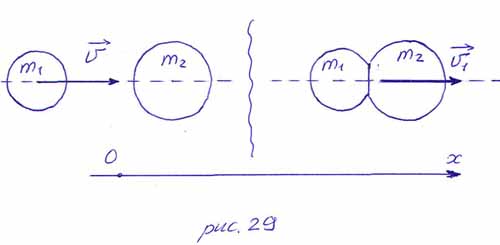
одно целое с некоторой скоростью (рис. 29). Направим ось 0х
вдоль линии центров шаров в сторону движения.
Поскольку импульс системы шаров
сохраняется, то в проекциях на ось 0х имеем: 
Убыль суммарной механической
энергии шаров равна количеству теплоты , выделившейся при столкновении:

Решая полученную систему
уравнений, найдём:
 и
и 
ПРИМЕР 33.
Лёгкий
пластилиновый шарик массы летит со скоростью
и сталкивается с массивной плитой, движущейся навстречу
шарику со скоростью 
Какое количество теплоты выделится при абсолютно неупругом
столкновении шарика с плитой? Массу плиты считать много большей массы шарика
(  ).
).
РЕШЕНИЕ. 1-й
способ решения.

Пусть — масса
плиты,  — совместная скорость плиты с шариком после столкновения.
— совместная скорость плиты с шариком после столкновения.
Направим ось 0х в сторону движения плиты, как показано на рис. 30.
Считая, что после столкновения плита с шариком движутся в том же направлении, в
котором двигалась плита до столкновения, по закону сохранения импульса можно
записать в проекциях на ось 0х уравнение: 
Убыль суммарной механической
энергии плиты и шарика равна искомому количеству теплоты :

Решая полученную систему уравнений,
найдём  (убедитесь в этом самостоятельно).
(убедитесь в этом самостоятельно).
Учитывая, что по
условию , имеем  .
.
Пренебрегая столь малым
по сравнению с единицей отношением масс в знаменателе, получаем
окончательно  .
.
2-й способ решения.
Обратимся к записанному в
предыдущем способе решения уравнению закона сохранения импульса и выразим из
него скорость  совместного движения плиты с шариком после
совместного движения плиты с шариком после
столкновения: 
Преобразуем это выражение
следующим образом: 
Учитывая, что по условию ,
пренебрежём отношением  по сравнению с единицей. Тогда
по сравнению с единицей. Тогда
получим  . Таким образом, скорость плиты можно
. Таким образом, скорость плиты можно
считать практически неизменной. И чем больше масса по сравнению
с , тем точнее будет это приблизительное равенство. Тогда, считая
скорость массивной плиты неизменной, перейдём в систему отсчёта, связанную с
плитой. В этой системе отсчёта плита покоится, а шарик до столкновения движется
навстречу плите со скоростью  . Следовательно, перед столкновением
. Следовательно, перед столкновением
его кинетическая энергия равна 
После столкновения в выбранной
системе отсчёта плита и шарик покоятся, их суммарная механическая энергия равна
нулю. Убыль механической энергии системы равна искомому количеству теплоты: 
В начало
-
Импульсом
материальнойточкимассойm,
движущейся со скоростьюVназывают векторную физическую величину,
равную произведению массы точки на ее
скорость:
![]() .
.
Обратим
внимание, что в литературе предыдущих
лет широко использовался термин
«количество движения», в настоящее
время вместо него рекомендовано
использовать термин «импульс».
Дифференцируя
соотношение (2.22) по времени, получим:
![]() .
.
Из
последнего соотношения следует, что
уравнение второго закона Ньютона можно
записать следующим образом:
![]() .
.
Известно,
что первая производная некоторой
величины по времени характеризует
скорость ее изменения, поэтому уравнение
(2.23) читают так:
-
скорость изменения
импульса материальной точки равна
действующей на нее силе.
Пусть
на материальную точку m
действует несколько постоянных сил F1,
F2,
… Fi.
Обозначим равнодействующую этих сил
через R:
![]() ,
,
и
пусть t
– время действия этих сил. Разделим
этот промежуток времени на малые
промежутки dt.
За время dt,
под действием внешних сил скорость
материальной точки изменится в
соответствии со вторым законом Ньютона:
![]() .
.
Разделяя
переменные в последнем соотношении
![]() ,
,
и интегрируя по времени в пределах отt1
до
t2
(t=
t2—
t1)
, получим:
![]() .
.
Преобразуем
полученное выражение к виду, определяющему
изменение импульса:
![]() .
.
В
проекциях на оси координат формула
(2.24) записывается так:

-
Импульсдействиясилы– векторная величина,
равная произведению силыFна время ее действияt.
Смысл
соотношения (2.24) может быть выражен
следующим образом:
-
приращение импульса
материальной точки равно импульсу
действия силы
![]() или
или
![]() .
.
Если
сила F
изменяется с течением времени, то импульс
действия силы К
равен
![]() ,
,
где
t1
и t2
время начала и окончания действия силы.
-
2.5.2. Импульс механической системы
Определение
механической системы, как совокупности
тел, рассматриваемых в данной задаче,
позволяет считать механической системой
совокупность материальных точек,
материальное тело, а также совокупность
материальных тел.
-
ИмпульсР
механической системы, состоящей из
N материальных точек (тел) равен векторной
сумме импульсов этих точек (тел), входящих
в эту систему:
![]() .
.
Таким
образом, импульс – есть величина
аддитивная.
При
поступательном движении все точки тела
описывают одинаковые траектории и имеют
в каждый момент времени одинаковые по
величине и направлению скорости и
ускорения. Импульс Р
тела, имеющего конечные размеры и массу
m,
движущегося поступательно со скоростью
V,
равен импульсу материальной точки такой
же массы m,
движущейся с той же скоростью:
Р=mV.
Заметим,
что силы, действующие на материальную
точку, всегда происходят от иных
материальных точек (тел). На тела
механической системы могут действовать
силы со стороны тел системы, так и со
стороны тел, не входящих в эту систему.
Силы взаимодействия между телами системы
называются внутренними; силы,
действующие со стороны иных тел,
называются внешними.
-
Внутренние силы– это силы взаимодействия между телами
механической системы.
В
дальнейшем силы будут обозначаться
следующим образом: fij
– внутренняя сила, действующая на i-ое
тело системы со стороны j-го
тела системы, Fi
– внешняя сила, действующая на i-ое
тело системы.
Рассмотрим
механическую систему, состоящую из N
материальных точек массами m1,
m2,
…, mN.
Предположим, что на каждое из них
действуют как тела самой системы, так
и внешние, по отношению к ней, тела.
Запишем
уравнение второго закона Ньютона для
каждого из тел системы:
![]() ,
,
(i=1, 2, …,N).
Сложим почленно
правые и левые части уравнений, в
результате чего получим
![]() .
.
Третий закон
Ньютона позволяет утверждать, что сумма
всех внутренних сил, действующих в
системе, равна нулю. Таким образом:
![]() .
.
Преобразуем
полученное соотношение:
![]()
Обозначим
![]() черезRВНЕШ
черезRВНЕШ
–
равнодействующую всех внешних сил, а
![]() как
как
Р – импульс
системы.
Уравнение (2.30)
примет вид:
![]() .
.
Можно сделать
следующие выводы.
-
Скорость изменения
импульса механической системы равна
сумме внешних сил, действующих на эту
систему. -
Уравнение (2.23),
полученное для материальной точки,
аналогично уравнению (2.31) справедливому
для системы материальных точек и для
механической системы.
Замечание.
-
Импульс тела,
имеющего неподвижную ось вращения,
равен нулю.
Это
утверждение несложно доказать в общем
случае. Проиллюстрируем его примером.
Вычислим импульс однородного диска,
вращающегося вокруг неподвижной оси,
проходящей через его центр.
|
|
Рис. |

Для
этого разделим мысленно диск на
элементарные части, так, чтобы массы
этих частей были одинаковыми. Рассмотрим
две частицы тела dm1
и dm2,
расположенные в точках А и В диаметра
на равных расстояниях и по разные стороны
от центра диска (см. рис.2.15).
Линейные
скорости этих частиц равны по величине,
но противоположны по направлению: V1=
– V2.
Суммарный импульс частиц dm1
и dm2
равен нулю, т. к.
dm
V1+dm
V2=dm
(V1+V2)=0.
Так
как каждой частице на диске найдется
частица ей диаметрально противоположная,
то суммарный импульс диска равен нулю.
Импульс имеет
большое значение при рассмотрении
процессов соударения, которые будут
рассматриваться далее.
-
Удар – взаимодействие,
протекающее в течение малого промежутка
времени. -
Абсолютнонеупругимударомназывается
взаимодействие, в результате которого
тела начинают двигаться вместе с
одинаковыми скоростями. Можно говорить,
что при неупругом ударе образуется
составное тело с массой, равной массе
сталкивающихся тел. -
Абсолютноупругимударомназывается
взаимодействие, в результате которого
скорости тел изменяются, но суммарные
импульс механическая энергия остаются
неизменными.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
2017-12-17 ![]()
Тело массой $m = 0,2 кг$ брошено с начальной скоростью $v_{1} = 50 м/с$ под углом $alpha = 30^{ circ}$ к горизонту. Найти приращение импульса тела: 1) за время от начала полета до падения на землю; 2) за половину этого времени. Сопротивление воздуха не учитывать.
Решение:

Приращение импульса
$Delta vec{p} = m vec{v}_{2} — m vec{v}_{1}$,
где $vec{v}_{1}$ — скорость в начальной точке; $vec{v}_{2}$ — скорость в конечной точке. Имеем очевидно (рис.)
$begin{cases} | Delta vec{p}| = 2mv_{1} sin alpha = 10 кг cdot м/с, \ | Delta vec{p}^{ prime}| = mv_{1} sin alpha = 5 кг cdot м/с, end{cases}$
где $| Delta vec{p}|$ — модуль приращения импульса за все время полета; $| Delta vec{p}^{ prime}|$ — модуль приращения импульса за половину времени полета.
Эти же результаты полезно получить иным путем. Приращение импульса тела за малый промежуток времени
$Delta vec{p} = vec{F} Delta t$, (2)
где $vec{F}$ — сила, действующая на тело. В данном случае $vec{F} = m vec{g}$ есть постоянная по модулю и направлению сила тяжести, поэтому равенство (2) справедливо для любого промежутка времени.
За время полета $tau$ тела его импульс изменяется под действием силы тяжести $vec{F} = m vec{g}$ на величину $Delta vec{p} = m vec{g} tau.$ Это время
$tau = (2 v_{1} sin alpha)/g$,
и для приращения импульса снова получаем выражение (1).
Примечание. Напомним, что приращением $Delta u$ или $Delta vec{u}$ некоторой величины (скалярной или векторной), произошедшим за время $Delta t = t_{2} — t_{1}$, называется разность между ее значениями в конечный $t_{2}$ и начальный $t_{1}$ моменты времени $Delta u = u_{2} — u_{1}$ или $Delta vec{u} = vec{u}_{2} — vec{u}_{1}$.
![]()
Download Article
Learn the change in momentum formulas, plus when and how to use them
![]()
Download Article
- Change in Momentum Formulas
- How to Calculate Change in Momentum
- Example Problems
- Tips
|
|
|
Studying for a physics test? Or just trying to wrap your brain around change in momentum? You’re definitely not alone. Momentum is a pretty weird concept in science. Think of it as a measurement of “mass in motion.”[1]
The more massive something is, or the faster it moves, the more momentum it has. Change the speed or apply a force, and the momentum changes too. But if you want to calculate that change, you’ll need to know which formula to use. To make this easier, we’ve prepared a guide to finding the change in momentum. Keep reading for a crystal-clear breakdown, plus some example problems to help you ace that next test.
Things You Should Know
- The change in momentum can be calculated using two possible formulas: Δp = m(Δv) and Δp = F(Δt).[2]
- The formula Δp = m(Δv) tells us that the change in momentum (Δp) is equal to mass (m) multiplied by change in velocity (Δv).[3]
- The formula Δp = F(Δt) tells us that the change in momentum (Δp) is equal to the force applied to an object (F) multiplied by the total time the force was applied (Δt).[4]
- Use Δp = m(Δv) when you’re given mass (in kg) and velocities (in m/s). Use Δp = F(Δt) when you’re given a force (in Newtons, or “N”) and time (in seconds).
-
1
Formula #1: Δp = m(Δv) The change in momentum (Δp) is equal to mass (m) multiplied by change in velocity (Δv). Use this formula when you know the mass of an object, as well as the velocity it gained or lost.[5]
- The change in momentum (Δp) is expressed in kg m/s (kilogram meters per second).
- The mass is expressed in kg.
- The change in velocity is expressed in m/s (meters per second).
- Δv can also be expressed as vf — vi where vf = the object’s final velocity and vi = the object’s initial (or starting) velocity. Therefore, you might see the equation Δp = m(Δv) represented as Δp = m(vf — vi).
-
2
Formula #2: Δp = F(Δt) The change in momentum (Δp) is equal to the force applied to an object (F) multiplied by the total time the force was applied (Δt). Use this formula when you know the force applied to an object, as well as how long the force was applied.[6]
- The change in momentum (Δp) is expressed in kg m/s (kilogram meters per second).
- The force (F) is expressed in Newtons. In most cases, Newtons are abbreviated as “N”.
- The amount of time the force was applied (Δt) is expressed in seconds.
- Δt is also called the “time interval.”


Advertisement
-
1
Using Δp = m(Δv) Let’s say a 10 kg object accelerates from 10 m/s to 30 m/s. We know the mass (m) = 10 kg. To find the change in velocity (Δv), we subtract the final speed from the starting speed. Since 30 m/s — 10 m/s = 20 m/s, we know that Δv = 20 m/s. This means that Δp = 10 kg * 20 m/s. Therefore, Δp = 200 kg m/s.
- We knew to use the formula Δp =m(Δv) because we were provided with mass (in kg) and velocities (in m/s).
- Remember that the change in momentum (Δp) is always expressed in kg m/s.
-
2
Using Δp = F(Δt) Let’s say that a force of 12 Newtons is applied to an object for 45 seconds. We know that F = 12 N, and Δt = 45 s. This means that Δp = 12 N * 45 s. Therefore, Δp = 540 kg m/s.
- We knew to use the formula Δp = F(Δt) because we were provided with the Force (in N) and time (in seconds).
- The change in momentum (Δp) is always expressed in kg m/s, regardless of which formula you use.


Advertisement
-
1
Example 1: A stationary 55 kg sled is pushed down a hill until it reaches 11 m/s. What is the change in the sled’s momentum? Which formula should you use to calculate it?
- Since we were provided with mass and velocity, we should use the formula Δp = m(Δv).
- We know that m = 55kg.
- Because the sled was stationary when it began moving, we know that it accelerated from 0 m/s to 11 m/s. This means that Δv = 11 m/s — 0 m/s. Therefore, Δv = 11 m/s.
- We can now plug in the values for m and Δv into the formula: Δp = 55 kg * 11 m/s, which equals 605 kg m/s.
- Therefore, the sled’s change in momentum is 605 kg m/s.
-
2
Example 2: A rocket engine ignites and burns for 45 s, applying a force of 3 million N to a spacecraft. What’s the change in the rocket’s momentum? Which formula should you use?
- Since we’re provided with a force and a time, we should use the formula Δp = F(Δt).
- We know the force was 3,000,000 N.
- Because the rocket engine only applies a force while it’s burning, we know that the force was applied to the spacecraft for a total of 45 of seconds.
- We can now plug in the values for F and Δt into the formula: Δp = 3,000,000 N * 45 s, which equals 135,000,000 kg m/s.
- Therefore, the change in the rocket’s momentum is 135,000,000 kg m/s (or 1.35*10^8 kg m/s).
-
3
Example 3: A 14,000 kg aircraft accelerates from 200 m/s to 550 m/s. What’s the aircraft’s change in momentum?
- Because we have mass and velocity, we should use Δp =m(Δv).
- We know the mass is 14,000 kg.
- Because the plane accelerated from 200 m/s to 550 m/s, we know that Δv = 550 m/s — 200 m/s. Therefore, Δv = 350 m/s. In other words, the aircraft’s change in velocity is 350 m/s.
- Plugging in these values gives us Δp = 14,000 kg * 350 m/s, which equals 4,900,000 kg m/s.
- Therefore, the aircraft’s change in momentum is 4,900,000 kg m/s.
-
4
Example 4: A scientist observes a boat sitting in a lake. After 25 seconds, the boat’s engine begins applying a force of 400 N, accelerating the boat. When the engine stops, the scientist notes that they had observed the boat for a total of 60 seconds. What is the boat’s change in momentum?
- Because we’re provided with a force and a time, we should use the formula Δp = F(Δt).
- We know F = 400 N.
- We know that the scientist observed the boat for a total of 60 s. However, the boat’s engine did not begin applying a force until 25 s had passed. Therefore, to find the time that the force was actually applied (Δt), we need to find the difference between 60 s and 25 s. Δt = 60 s — 25 s. Therefore, Δt = 35 s. In other words, the force was applied to the boat for a total of 35 seconds.
- Plugging in the values for F and Δt into our formula, Δp = F(Δt), we know that Δp = 400 N * 35 s, which equals 14,000 kg m/s.
- Therefore, the boat’s change in momentum is 14,000 kg m/s.




Advertisement
Ask a Question
200 characters left
Include your email address to get a message when this question is answered.
Submit
Advertisement
-
When learning about momentum, you might encounter the concept of “Impulse,» defined as Force applied over time, represented by the value J. J = Δp. Because J and Δp have the same value, J can also be calculated using J = m(Δv) or Δp = F(Δt). Impulse and change in momentum have the same value and are both expressed in kg m/s (kilogram meters per second). You’ll encounter impulse again in future physics courses, where its distinction from change in momentum will be explained in greater detail.[7]
Thanks for submitting a tip for review!
Advertisement
References
About This Article
Thanks to all authors for creating a page that has been read 7,275 times.
Did this article help you?
Get all the best how-tos!
Sign up for wikiHow’s weekly email newsletter
Subscribe
You’re all set!