Вы здесь
Проецирование точки
СОДЕРЖАНИЕ
- Проецирование точки
- Пример проецирования точки
- Литература
Проецирование точки
Точка относится к основным, неопределяемым понятиям геометрии. Она не может быть определена другими более элементарными понятиями. Точка не имеет размеров.
Положение точки А в пространстве определяется тремя координатами (x, y, z), показывающими величины расстояний, на которые точка удалена от плоскостей проекций.
Чтобы определить эти расстояния достаточно через точку А провести прямые, перпендикулярные к плоскостям, определить точки А′, А″, А′″ пересечения этих прямых с плоскостями проекций и измерить величины отрезков [АA′], [АA″], [АA′″], которые равны значениям аппликаты z, ординаты y и абсциссы x точки А (рис.1).

Рис.1. Проецирование точки
Точки А′, А″, А′″ называют ортогональными проекциями точки А:
Принятые обозначения:
| А1 или А′ | — | горизонтальная проекция точки А; |
| А2 или А″ | — | фронтальная проекция точки А; |
| А3 или А′″ | — | профильная проекция точки А. |
Отрезки:
| [АA′]=[ОАx] | — | абсцисса точки А (определяет расстояние точки от плоскости П3); |
| [АA″]=[ОАy] | — | ордината точки А (определяет расстояние точки от плоскости П2); |
| [АA′″]=[ОАz] | — | аппликата точки А (определяет расстояние точки от плоскости П1). |
Прямые АA′, АA″, АA′″ называют проецирующими прямыми или проецирующими лучами.
| АA′ | — | горизонтально проецирующая прямая; |
| АA″ | — | фронтально проецирующая прямая; |
| АA′″ | — | профильно проецирующая прямая. |
При построении проекций точки А необходимо знать, что горизонтальная проекция определяется абсциссой x и ординатой y, фронтальная проекция – абсциссой x и аппликатой z, а профильная – ординатой y и аппликатой z, т.е.
А′ (x, y)
А″ (x, z)
А′″ (y, z)
Если даны две проекции точки, то по ним можно найти третью проекцию, так как все проекции связаны между собой линиями связи.
Пример проецирования точки
Пример: Даны две проекции точки А (рис.2), необходимо найти третью проекцию точки.

Рис.2. Проецирование точки
Для начала найдем проекции точки А на оси координат, т.е. Аx, АyП1 и Аz (рис.3).

Рис.3. Проецирование точки
При помощи циркуля получаем проекцию точки АyП3 (рис.4).

Рис.4. Проецирование точки
Зная, что проекция точки А′″ имеет координаты (y, z), проводим проецирующие лучи из точки АyП3 и Аz. Точкой пересечения этих лучей будет точка А′″ (рис.5).

Рис.5. Проецирование точки
ЛИТЕРАТУРА
- Начертательная геометрия / С.А. Фролов. – М.: Машиностроение, 1987 – 240 с.
- Черчение / Н.С. Брилинг. – М.: Стройиздат, 1989. – 420 с.
- Краткий справочник по начертательной геометрии и машиностроительному черчению / Н.П. Сберегаев, М.А. Герб. М. – Л., Машиностроение, 1965, 264 с.
- 12492 просмотра
Построение ортогональных проекций точек
Положение точки в пространстве может быть задано двумя её ортогональными проекциями, например, горизонтальной и фронтальной, фронтальной и профильной. Сочетание любых двух ортогональных проекций позволяет узнать значение всех координат точки, построить третью проекцию, определить октант, в котором она находится. Рассмотрим несколько типичных задач из курса начертательной геометрии.
По заданному комплексному чертежу точек A и B необходимо:
- Записать их координаты.
- Достроить проекции т. A и B на плоскость П3.
- Определить положение точек в пространстве (октант или плоскость проекций).
- Построить наглядное изображение точек в системе плоскостей П1, П2, П3.

Определение координат точек по их проекциям
Определим сначала координаты т. A, которые можно записать в виде A (x, y, z). Горизонтальная проекция т. A – точка A’, имеющая координаты x, y. Проведем из т. A’ перпендикуляры к осям x, y и найдем соответственно Aх, Aу. Координата х для т. A равна длине отрезка AхO со знаком плюс, так как Aх лежит в области положительных значений оси х. С учетом масштаба чертежа находим х = 10. Координата у равна длине отрезка AуO со знаком минус, так как т. Aу лежит в области отрицательных значений оси у. С учетом масштаба чертежа у = –30. Фронтальная проекция т. A – т. A» имеет координаты х и z. Опустим перпендикуляр из A» на ось z и найдем Az. Координата z точки A равна длине отрезка AzO со знаком минус, так как Az лежит в области отрицательных значений оси z. С учетом масштаба чертежа z = –10. Таким образом, координаты т. A (10, –30, –10).
Координаты т. B можно записать в виде B (x, y, z). Рассмотрим горизонтальную проекцию точки B – т. В’. Так как она лежит на оси х, то Bx = B’ и координата Bу = 0. Абсцисса x точки B равна длине отрезка BхO со знаком плюс. С учетом масштаба чертежа x = 30. Фронтальная проекция точки B – т. B˝ имеет координаты х, z. Проведем перпендикуляр из B» к оси z, таким образом найдем Bz. Аппликата z точки B равна длине отрезка BzO со знаком минус, так как Bz лежит в области отрицательных значений оси z. С учетом масштаба чертежа определим значение z = –20. Таким образом, координаты B (30, 0, -20). Все необходимые построения представлены на рисунке ниже.

Построение проекций точек
Точки A и B в плоскости П3 имеют следующие координаты: A»’ (y, z); B»’ (y, z). При этом A» и A»’ лежат одном перпендикуляре к оси z, так как координата z у них общая. Точно также на общем перпендикуляре к оси z лежат B» и B»’. Чтобы найти профильную проекцию т. A, отложим по оси у значение соответствующей координаты, найденное ранее. На рисунке это сделано с помощью дуги окружности радиуса AуO. После этого проведем перпендикуляр из Aу до пересечения с перпендикуляром, восстановленным из точки A» к оси z. Точка пересечения этих двух перпендикуляров определяет положение A»’.
Точка B»’ лежит на оси z, так как ордината y этой точки равна нулю. Для нахождения профильной проекции т. B в данной задаче необходимо лишь провести перпендикуляр из B» к оси z. Точка пересечении этого перпендикуляра с осью z есть B»’.

Определение положения точек в пространстве
Наглядно представляя себе пространственный макет, составленный из плоскостей проекций П1, П2 и П3, расположение октантов, а также порядок трансформации макета в эпюр, можно непосредственно определить, что т. A расположена в III октанте, а т. B лежит в плоскости П2.
Другим вариантом решения данной задачи является метод исключений. Например, координаты точки A (10, -30, -10). Положительная абсцисса x позволяет судить о том, что точка расположена в первых четырех октантах. Отрицательная ордината y говорит о том, что точка находится во втором или третьем октантах. Наконец, отрицательная аппликата z указывает на то, что т. A расположена в третьем октанте. Приведенные рассуждения наглядно иллюстрирует следующая таблица.
| Октанты | Знаки координат | ||
| x | y | z | |
| 1 | + | + | + |
| 2 | + | – | + |
| 3 | + | – | – |
| 4 | + | + | – |
| 5 | – | + | + |
| 6 | – | – | + |
| 7 | – | – | – |
| 8 | – | + | – |
Координаты точки B (30, 0, -20). Поскольку ордината т. B равна нулю, эта точка расположена в плоскости проекций П2. Положительная абсцисса и отрицательная аппликата т. B указывают на то, что она расположена на границе третьего и четвертого октантов.
Построение наглядного изображения точек в системе плоскостей П1, П2, П3

Используя фронтальную изометрическую проекцию, мы построили пространственный макет III октанта. Он представляет собой прямоугольный трехгранник, у которого гранями являются плоскости П1, П2, П3, а угол (-y0x) равен 45 º. В этой системе отрезки по осям x, y, z будут откладываться в натуральную величину без искажений.
Построение наглядного изображения т. A (10, -30, -10) начнем с её горизонтальной проекции A’. Отложив по оси абсцисс и ординат соответствующие координаты, найдем точки Aх и Aу. Пересечение перпендикуляров, восстановленных из Aх и Aу соответственно к осям x и y определяет положение т. A’. Отложив от A’ параллельно оси z в сторону её отрицательных значений отрезок AA’, длина которого равна 10, находим положение точки A.
Наглядное изображение т. B (30, 0, -20) строится аналогично – в плоскости П2 по осям x и z нужно отложить соответствующие координаты. Пересечение перпендикуляров, восстановленных из Bх и Bz, определит положение точки B.
-
Проекции точки
Проецирование
точки на три плоскости проекций
координатного угла начинают с получения
ее изображения на плоскости H
— горизонтальной плоскости проекций.
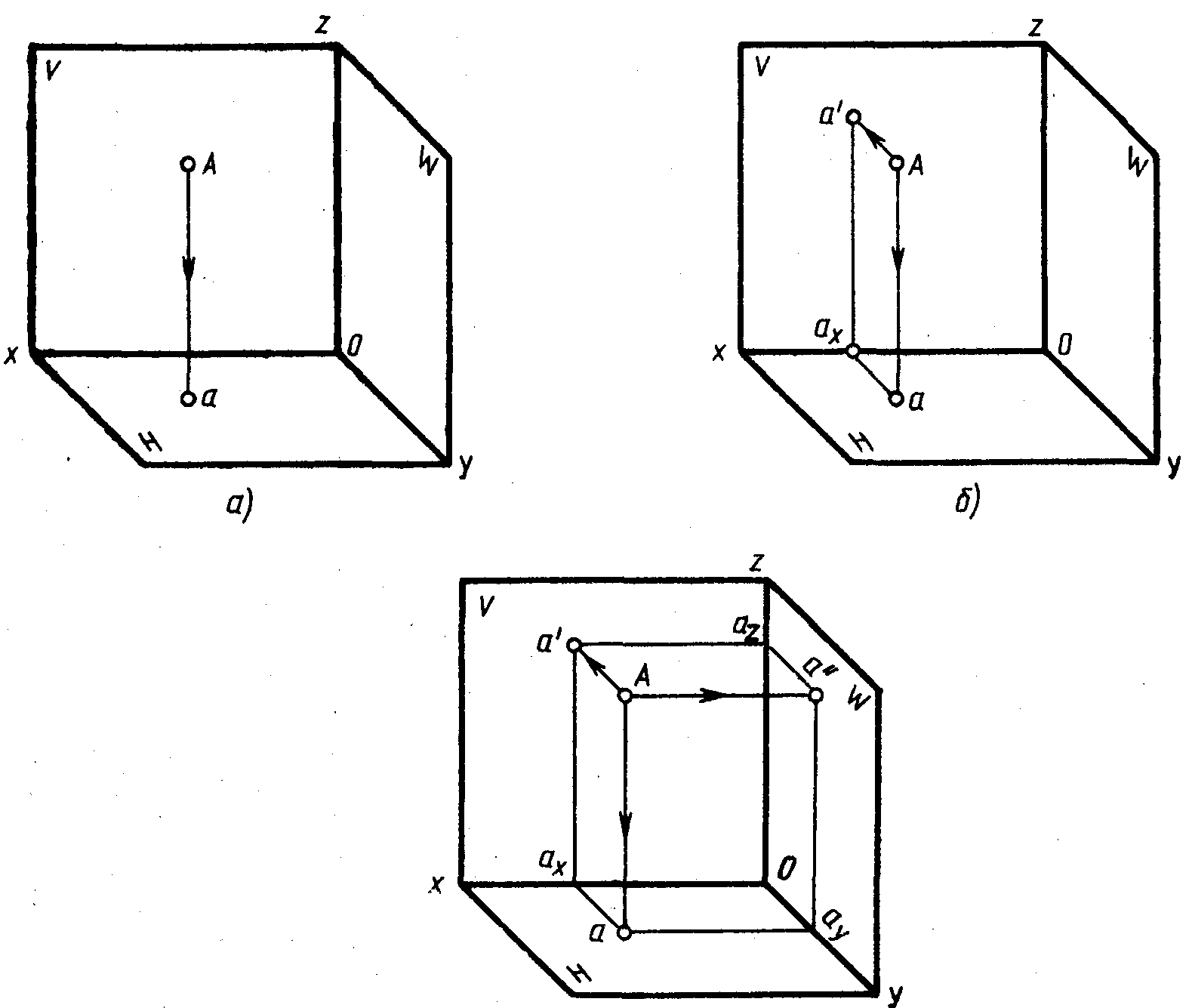
Для этого через точку А (рис. 4.12, а)
проводят проецирующий луч перпендикулярно
плоскости H.
На
рисунке перпендикуляр к плоскости Н
параллелен оси Oz. Точку пересечения
луча с плоскостью Н (точку а) выбирают
произвольно. Отрезок Аа определяет,
на каком расстоянии находится точка А
от плоскости Н, указывая тем самым
однозначно положение точки А на рисунке
по отношению к плоскостям проекций.
Точка а является прямоугольной проекцией
точки А на плоскость Н и называется
горизонтальной проекцией точки А (рис.
4.12, а).
в)
Рис.
4.12.
Для
получения изображения точки А на
плоскости V (рис. 4.12,б) через точку А
проводят проецирующий луч перпендикулярно
фронтальной плоскости проекций V. На
рисунке перпендикуляр к плоскости V
параллелен оси Оу. На плоскости Н
расстояние от точки А до плоскости V
изобразится отрезком аах,
параллельным оси Оу и перпендикулярным
оси Ох. Если представить себе, что
проецирующий луч и его изображение
проводят одновременно в направлении
плоскости V, то когда изображение луча
пересечет ось Ох в точке ах,
луч пересечет плоскость V в точке а’.
Проведя из точки ах
в плоскости V перпендикуляр к оси Ох,
который является изображением
проецирующего луча Аа на плоскости V, в
пересечении с проецирующим лучом
получают точку а’. Точка а’ является
фронтальной проекцией точки А, т. е. ее
изображением на плоскости V.
Изображение
точки А на профильной плоскости проекций
(рис. 4.12, в) строят с помощью проецирующего
луча, перпендикулярного плоскости W. На
рисунке перпендикуляр к плоскости W
параллелен оси Ох. Проецирующий луч от
точки А до плоскости W на плоскости Н
изобразится отрезком аау,
параллельным оси Ох и перпендикулярным
оси Оу. Из точки Оу параллельно оси Oz и
перпендикулярно оси Оу строят изображение
проецирующего луча аА и в пересечении
с проецирующим лучом получают точку
а». Точка а» является профильной
проекцией точки А, т. е. изображением
точки А на плоскости W.
Точку
а» можно построить, проведя от точки
а’ отрезок а’аz
(изображение проецирующего луча Аа»
на плоскости V) параллельно оси Ох, а от
точки аz
— отрезок а»аz
параллельно оси Оу до пересечения с
проецирующим лучом.
Получив
три проекции точки А на плоскостях
проекций, координатный угол развертывают
в одну плоскость, как показано на рис.
4.11,б, вместе с проекциями точки А и
проецирующих лучей, а точку А и проецирующие
лучи Аа, Аа’ и Аа» убирают. Края
совмещенных плоскостей проекций не
проводят, а проводят только оси проекций
Oz, Оу и Ох, Оу1
(рис. 4.13).
Анализ
ортогонального чертежа точки показывает,
что три расстояния — Аа’, Аа и Аа»
(рис. 4.12, в), характеризующие положение
точки А в пространстве, можно определить,
отбросив сам объект проецирования —
точку А, на развернутом в одну плоскость
координатном угле (рис. 4.13). Отрезки
а’аz,
ааy
и Оах
равны Аа» как противоположные стороны
соответствующих прямоугольников (рис.
4.12,в и 4.13). Они определяют расстояние,
на котором находится точка А от профильной
плоскости проекций. Отрезки а’ах,
а»ау1
и Оау
равны отрезку Аа, определяют расстояние
от точки А до горизонтальной плоскости
проекций, отрезки аах,
а»аz
и Оаy1
равны отрезку Аа’, определяющему
расстояние от точки А до фронтальной
плоскости проекций.
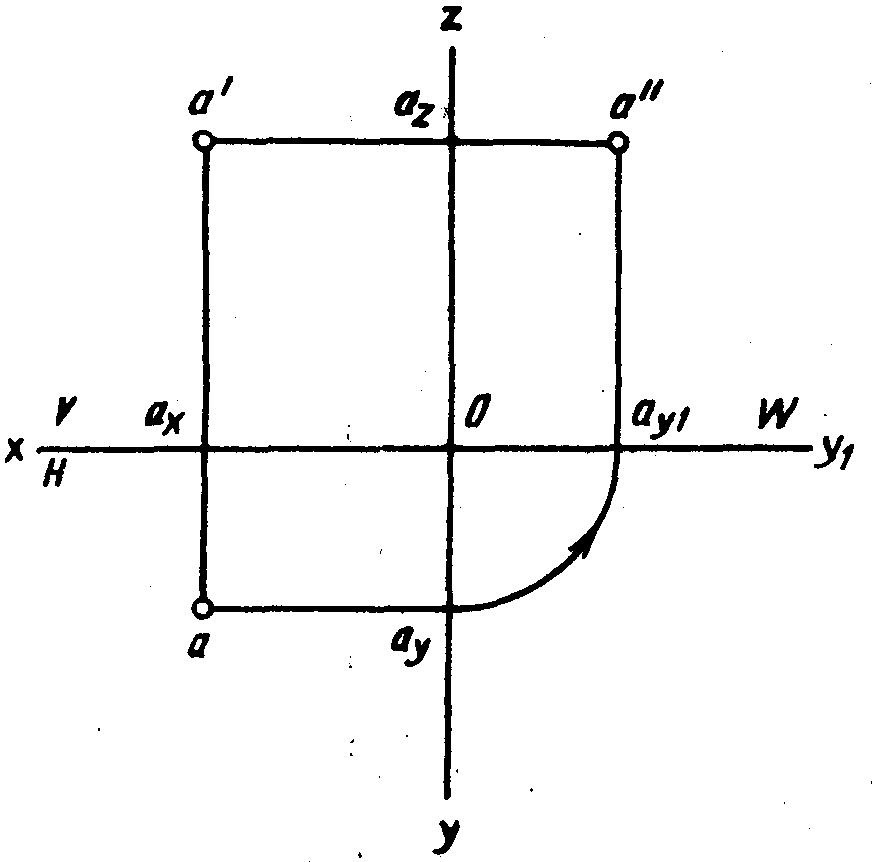
Рис.
4.13.
Отрезки
Оах,
Оау
и Оаz,
расположенные на осях проекций, являются
графическим выражением размеров
координат X, Y и Z точки А. Координаты
точки обозначают с индексом соответствующей
буквы. Измерив величину этих отрезков,
можно определить положение точки в
пространстве, т. е. задать координаты
точки.
На
эпюре отрезки а’ах
и аах
располагаются как одна линия,
перпендикулярная к оси Ох а отрезки
а’аz
и a»az
— к оси Оz.
Эти лини называются линиями проекционной
связи. Они пересекают оси проекций в
точках ах
и аz
соответственно. Линия проекционной
связи, соединяющая горизонтальную
проекцию точки А с профильной, оказалась
«разрезанной» в точке ау.
Две
проекции одной и той же точки всегда
располагаются на одной линии проекционной
связи, перпендикулярной к оси проекций.
Для
представления положения точки в
пространстве достаточно двух ее проекций
и заданного начала координат (точка О)
На рис. 4.14, б две проекции точки полностью
определяют ее положение в пространстве
По этим двум проекциям можно построит
профильную проекцию точки А. Поэтому в
дальнейшем, если не будет необходимости
в профильной проекции, эпюры будут
построены на двух плоскостях проекций:
V и Н.

Рис.
4.14. Рис. 4.15.
Рассмотрим
несколько примеров построения и чтения
чертежа точки.
Пример
1.
Определение координат точки J заданной
на эпюре двумя проекциях (рис. 4.14).
Измеряются три отрезка: отрезок ОвХ
(координата X), отрезок bХb
(координата Y) и отрезок bХb’
(координата Z). Координаты записывают в
следующем п рядке: X, Y и Z, после буквенного
обозначения точки, например, В20; 30; 15.
Пример
2.
Построение точки по заданным координатам.
Точка С задана координатами С30; 10; 40. На
оси Ох (рис. 4.15) находят точку сх,
в которой линия проекционной связи
пересекает ось проекций. Для этого по
оси Ох от начала координат (точка О)
откладывают координату X (размер 30) и
получают точку сх.
Через эту точку перпендикулярно оси Ох
проводят линию проекционной связи и от
точки вниз откладывают координату У
(размер 10), получают точку с — горизонтальную
проекцию точки С. Вверх от точки сх
по линии проекционной связи откладывают
координату Z (размер 40), получают точку
с’ — фронтальную проекцию точки С.

Рис.
4.16.
Пример
3.
Построение профильной проекции точки
по заданным проекциям. Заданы проекции
точки D — d и d’. Через точку О проводят
оси проекций Oz, Oy и Оу1
(рис. 4.16, а). Для построения профильной
проекции точки D отточки d’ проводят
линию проекционной связи, перпендикулярную
оси Oz, и продолжают ее вправо за ось Oz.
На этой линии будет располагаться
профильная проекция точки D. Она будет
находиться на таком расстоянии от оси
Oz, на каком горизонтальная проекция
точки d располагается: от оси Ох, т. е. на
расстоянии ddx.
Отрезки dzd»
и ddx
одинаковы, так как определяют одно и то
же расстояние — расстояние от точки D
до фронтальной плоскости проекций. Это
расстояние является координатой У точки
D.
Графически
отрезок dzd»
строят перенесением отрезка ddx
с горизонтальной плоскости проекций
на профильную. Для этого проводят линию
проекционной связи параллельно оси Ох,
получают на оси Оу точку dy
(рис. 4.16,б). Затем переносят размер отрезка
Ody
на ось Оу1,
проведя из точки О дугу радиусом, равным
отрезку Ody,
до пересечения с осью Оу1
(рис. 4.16,б), получают точку dy1.
Эту точку можно построить и как показано
на рис. 4.16, в, проведя прямую под углом
45° к оси Оу из точки dy.
Из точки dy1
проводят линию проекционной связи
параллельно оси Oz и на ней откладывают
отрезок, равный отрезку d’dx,
получают точку d».
Перенос
величины отрезка dxd
на профильную плоскость проекций можно
осуществить с помощью постоянной прямой
чертежа (рис. 4.16, г). В этом случае линию
проекционной связи ddy
проводят через горизонтальную проекцию
точки параллельно оси Оу1
до пересечения с постоянной прямой, а
затем параллельно оси Оу до пересечения
с продолжением линии проекционной связи
d’dz.
Частные
случаи расположения точек относительно
плоскостей проекций
Положение
точки относительно плоскости проекций
определяется соответствующей координатой,
т. е. величиной отрезка линии проекционной
связи от оси Ох до соответствующей
проекции. На рис. 4.17 координата У точки
А определяется отрезком аах
— расстояние от точки А до плоскости
V. Координата Z точки А определяется
отрезком а’ах
— расстояние от точки А до плоскости
Н. Если одна из координат равна нулю, то
точка расположена на плоскости проекций.
На рис. 4.17 приведены примеры различного
расположения точек относительно
плоскостей проекций. Координата Z точки
В равна нулю, точка находится в плоскости
Н. Ее фронтальная проекция находится
на оси Ох и совпадает с точкой bх.
Координата У точки С равна нулю, точка
располагается на плоскости V, ее
горизонтальная проекция с находится
на оси Ох и совпадает с точкой сх.
Следовательно,
если точка находится на плоскости
проекций, то одна из проекций этой точки
лежит на оси проекций.

Рис.
4.17.
На
рис. 4.17 координаты Z и Y точки D равны
нулю, следовательно, точка D находится
на оси проекций Ох и две ее проекции
совпадают.
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Уравнения проекций на оси координат
Задачи по динамике.
I и II закон Ньютона.
Ввод и направление осей.
Проецирование сил на оси.
Решение систем уравнений.
Самые типовые задачи по динамике
Начнем с I и II законов Ньютона.
Откроем учебник физики и прочтем. I закон Ньютона: существуют такие инерциальные системы отсчета в которых. Закроем такой учебник, я тоже не понимаю. Ладно шучу, понимаю, но объясню проще.
I закон Ньютона: если тело стоит на месте либо движется равномерно (без ускорения), сумма действующих на него сил равна нулю.
Вывод: Если тело движется с постоянной скоростью или стоит на месте векторная сумма сил будет ноль.
II закон Ньютона: если тело движется равноускоренно или равнозамедленно (с ускорением), сумма сил, действующих на него, равна произведению массы на ускорение.
Вывод: Если тело двигается с изменяющейся скоростью, то векторная сумма сил, которые как-то влияют на это тело ( сила тяги, сила трения, сила сопротивления воздуха), равна массе этого тело умножить на ускорение.
При этом одно и то же тело чаще всего движется по-разному (равномерно или с ускорением) в разных осях. Рассмотрим именно такой пример.
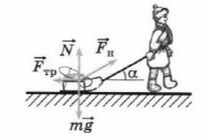
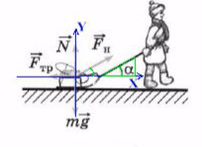
Задача 1. Определите коэффициент трения шин автомобиля массой 600 кг, если сила тяги двигателя 4500 Н вызывает ускорение 5 м/с².
Обязательно в таких задачах делать рисунок, и показывать силы, которые дествуют на машину:
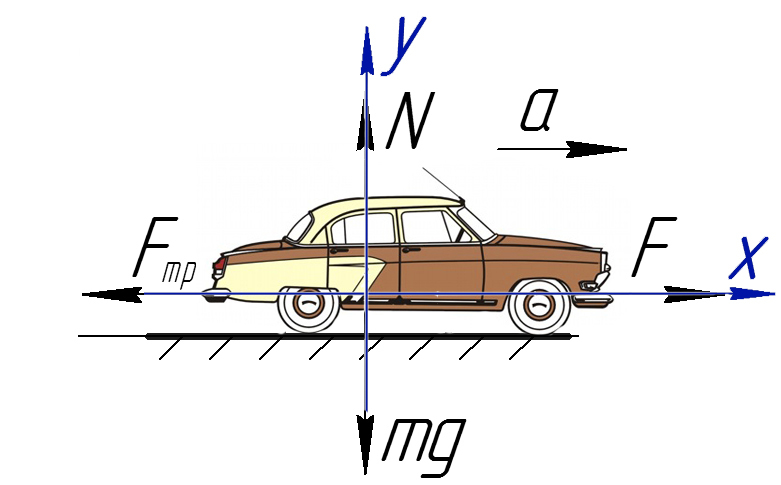
На Ось Х: движение с ускорением
На Ось Y: нет движения (здесь координата, как была ноль так и останется, машина не поднимает в горы или спускается вниз)
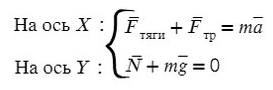
Те силы, направление которых совпадает с направлением осей, будут с плюсом, в противоположном случае — с минусом.
По оси X: сила тяги направлена вправо, так же как и ось X, ускорение так же направлено вправо.
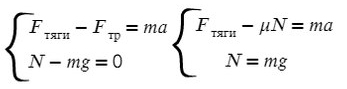
Fтр = μN, где N — сила реакции опоры. На оси Y: N = mg, тогда в данной задаче Fтр = μmg.

Коэффициент трения — безразмерная величина. Следовательно, единиц измерения нет.
Задача 2. Груз массой 5кг, привязанный к невесомой нерастяжимой нити, поднимают вверх с ускорением 3м/с². Определите силу натяжения нити.
Сделаем рисунок, покажем силы, которые дествуют на груз
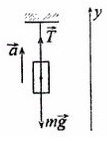
T — сила натяжения нити
На ось X: нет сил

Разберемся с направлением сил на ось Y:
Выразим T (силу натяжения) и подставим числительные значения:

Самое главное не запутаться с направлением сил (по оси или против), все остальное сделает калькулятор или всеми любимый столбик.
Далеко не всегда все силы, действующие на тело, направлены вдоль осей.
Простой пример: мальчик тянет санки
Если мы так же построим оси X и Y, то сила натяжения (тяги) не будет лежать ни на одной из осей.
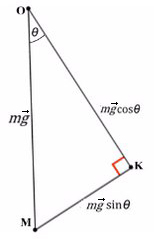
 Чтобы спроецировать силу тяги на оси, вспомним прямоугольный треугольник.
Чтобы спроецировать силу тяги на оси, вспомним прямоугольный треугольник.
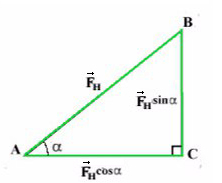
Отношение противолежащего катета к гипотенузе — это синус.
Отношение прилежащего катета к гипотенузе — это косинус.
Сила тяги на ось Y — отрезок (вектор) BC.
Сила тяги на ось X — отрезок (вектор) AC.
Если это непонятно, посмотрите задачу №4.
Чем длинее будет верека и, соответсвенно, меньше угол α, тем проще будет тянуть санки. Идеальный вариант, когда веревка параллельна земле , ведь сила, которая действуют на ось X— это Fнcosα. При каком угле косинус максимален? Чем больше будет этот катет, тем сильнее горизонтальная сила.
Задача 3. Брусок подвешен на двух нитях. Сила натяжения первой составляет 34 Н, второй — 21Н, θ1 = 45°, θ2 = 60°. Найдите массу бруска.
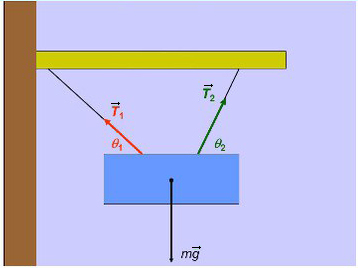
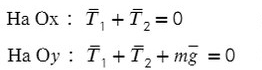
Введем оси и спроецируем силы:
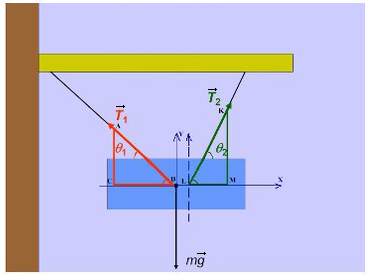
Получаем два прямоугольных треугольника. Гипотенузы AB и KL — силы натяжения. LM и BC — проекции на ось X, AC и KM — на ось Y.

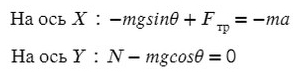
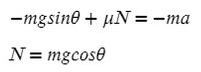
Задача 4. Брусок массой 5 кг (масса в этой задаче не нужна, но, чтобы в уравнениях все было известно, возьмем конкретное значение) соскальзывает с плоскости, которая наклонена под углом 45°, с коэффициентом трения μ = 0,1. Найдите ускорение движения бруска?
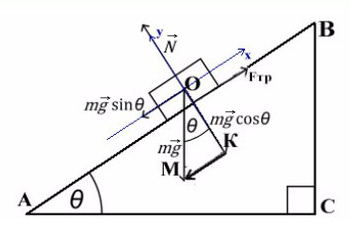
Когда же есть наклонная плоскость, оси (X и Y) лучше всего направить по направлению движения тела. Некоторые силы в данном случае ( здесь это mg) не будут лежать ни на одной из осей. Эту силу нужно спроецировать, чтобы она имела такое же направление, как и взятые оси.
Всегда ΔABC подобен ΔKOM в таких задачах (по прямому углу и углу наклона плоскости).
Рассмотрим поподробнее ΔKOM:
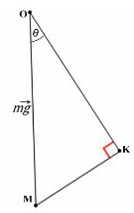
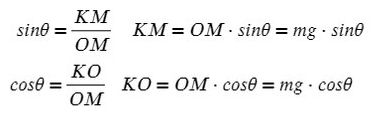 Получим, что KO лежит на оси Y, и проекция mg на ось Y будет с косинусом. А вектор MK коллинеарен (параллелен) оси X, проекция mg на ось X будет с синусом, и вектор МК направлен против оси X (то есть будет с минусом).
Получим, что KO лежит на оси Y, и проекция mg на ось Y будет с косинусом. А вектор MK коллинеарен (параллелен) оси X, проекция mg на ось X будет с синусом, и вектор МК направлен против оси X (то есть будет с минусом).
Не забываем, что, если направления оси и силы не совпадают, ее нужно взять с минусом!
Из оси Y выражаем N и подставляем в уравнение оси X, находим ускорение:

Как видно, массу в числителе можно вынести за скобки и сократить со знаменаталем. Тогда знать ее не обязательно, получить ответ реально и без нее.
Да-да, в идеальных условиях (когда нет силы сопротивления воздуха и т.п.), что перо, что гиря скатятся (упадут) за одно и тоже время.
Задача 5. Автобус съезжает с горки под уклоном 60° с ускорением 8 м/с² и с силой тяги 8 кН. Коэффициент трения шин об асфальт равен 0,4. Найдите массу автобуса.
Сделаем рисунок с силами:
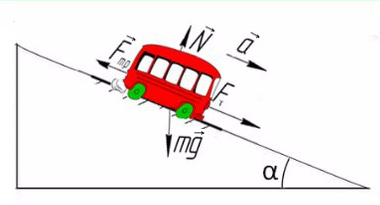
Введем оси X и Y. Спроецируем mg на оси:
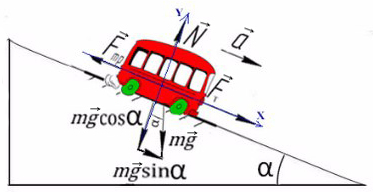
Запишем второй закон Ньютона на X и Y:

Задача 6. Поезд движется по закруглению радиуса 800 м со скоростью 72 км/ч. Определить, на сколько внешний рельс должен быть выше внутреннего. Расстояние между рельсами 1,5 м.
Самое сложное — понять, какие силы куда действуют, и как угол влияет на них.
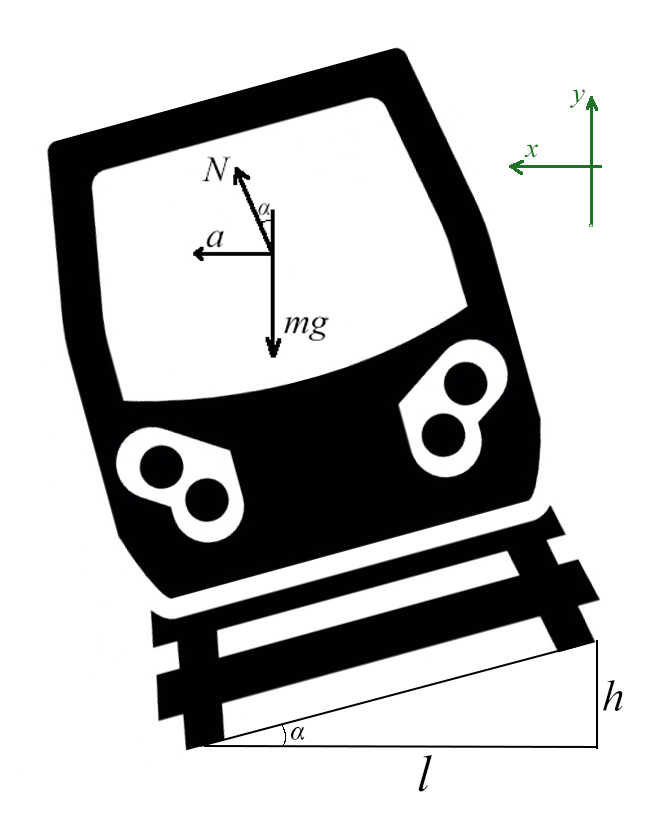
Вспомни, когда едешь по кругу на машине или в автобусе, куда тебя выталкивает? Для этого и нужен наклон, чтобы поезд не упал набок!
Угол α задает отношение разницы высоты рельсов к расстоянию между ними (если бы рельсы находились горизонтально)
Запишем какие силы действуют на оси:
Ускорение в данной задачи центростремительное!
Поделим одно уравнение на другое:
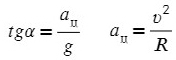
Тангенс — это отношение противолежащего катета к прилежащему:
Как мы выяснили, решение подобных задач сводится к расстановке направлений сил, проецированию их на оси и к решению систем уравнений, почти сущий пустяк.
В качестве закрепления материала решите несколько похожих задач с подсказками и ответами.
Как составить уравнение проекций ?
Автор: Константин Вавилов · Опубликовано 23.09.2016 · Обновлено 28.11.2017
При решении задачек по статике, в теоретической механике или при решении задач по сопромату, часто, требуется определять сумму проекций сил на какую-то ось. Например, в термехе это используется при приведении какой-то системы сил к простейшему виду. В сопромате для определения реакций возникающих в опорах.
Уравнения проекций на примере
Рассмотрим, как составить уравнение проекций всех сил на какую-либо ось на примере. Возьмем прямоугольную декартову систему координат x-y и произвольную систему сил:
Проецируем все силы на координатные оси.Сила F1 дает положительную проекцию на ось X, так как ее направление совпадает с направлением этой оси. На ось Y эта сила не дает проекции, так как она перпендикулярная этой оси. Рассуждая, таким образом, можно записать следующие уравнения сумм проекций:
В выше описанном примере все силы были параллельны или перпендикулярны осям, но на практике же в задачах обычно силы расположены под некоторым углом к координатным осям. В таком случае силы раскладываются на две проекции параллельные осевым линиям:
Для нахождения этих сил удобнее вынести отдельно силовой треугольник и найти их следующим образом:
После этого можно записать уравнение проекций сил на горизонтальную и вертикальную ось:
Координатный способ определения движения точки в теоретической механике
Содержание:
Координатный способ определения движения точки:
При координатном способе определения движения точки должны быть даны уравнения движения, т. е. заданы координаты точки как функции времени:
Задание движения точки в прямоугольных координатах
Как известно из курса аналитической геометрии, положение точки M в пространстве может быть определено положением ее проекций P, Q и R на три взаимно перпендикулярные оси (рис. 84), называемые осями координат.
Рис. 84
Положение точки P на оси Ox вполне определяют абсциссой х. Совершенно так же положение точек Q и R определяют ординатой у и аппликатой z.
Если точка M движется относительно осей xOyz, то проекции Р, Q и R перемещаются по осям и координаты точки M изменяются.
Для определения движения точки M нужно знать ее координаты для каждого мгновения, выразить их в функциях времени.
Эти функции непрерывны, так как точка не может из одного положения перейти в другое, минуя промежуточные. Они должны быть однозначны, так как точка занимает в пространстве в каждое мгновение только одно положение.
Соотношения (58) называют кинематическими уравнениями движения точки в прямоугольных координатах, а способ определения движения точки посредством соотношений (58) называют координатным способом определения движения точки. Это название неточно, потому что, кроме прямолинейных прямоугольных координат, существует множество других координатных систем.
Если траектория точки лежит в одной плоскости, то движение точки определяют двумя уравнениями в системе координат xОy: x=x(t), y=y(t).
Следовательно, при координатном способе задания движения точки в пространстве нужно задать ее три координаты, а на плоскости—две координаты как функции времени. Если точка движется прямолинейно, то, приняв прямую, по которой она движется, за ось абсцисс, мы определим движение точки одним уравнением
Если движение точки задано в координатной форме, то для определения ее траектории надо из уравнений движения исключить время
Уравнение траектории
Можно определить траекторию точки, если в уравнениях движения (58) давать аргументу t различные значения и, вычислив соответствующие значения функций, отмечать положения точки по ее координатам. Следовательно. кинематические уравнения движения точки (58) можно
рассматривать как уравнения ее траектории в параметрической форме, а время — как независимый переменный параметр.
Однако более удобно получить уравнение траектории, исключив время из уравнений (58). В самом деле, траекторией называют геометрическое место всех положений движущейся точки, но в геометрии нет понятия времени, а поэтому для получения уравнения траектории нужно из кинематических уравнений движения (58) исключить время t. Если точка движется в плоскости, то, исключив время из уравнений (58′) и (58″), мы получим соотношение, связывающее х и у:
Это уравнение плоской кривой—траектории точки. Если же движение задано тремя уравнениями (58), то, исключив время, получим два уравнения между тремя координатами:
(59 / )
выражающие, как известно из аналитической геометрии, кривую (траекторию) в пространстве. Точнее говоря, уравнения (59) или (59′) выражают кривую, которая полностью или в некоторой своей части является геометрическим местом всех положений движущейся точки.
Иногда бывает нужно выразить в естественной форме движение точки, заданное в прямоугольных координатах уравнениями (58), и, кроме уравнения траектории, дать также уравнение (51) движения точки по траектории. Чтобы его получить, надо продифференцировать уравнения (58) и полученные дифференциалы координат точки подставить в известную из курса высшей математики формулу, выражающую абсолютную величину элемента дуги:
(60)
Проинтегрировав (60), мы получим уравнение (51), выражающее длину дуги s как функцию времени, или, что то же, закон движения точки по траектории.
Задача №1
По заданным уравнениям движения точки в координатной форме найти уравнение траектории и уравнение движения по траектории:
1) х = 5 cos 2t, y = 3+5sin 2t;
2) x=21,2 sin 2 t, у = 21,2 cos 2t.
В обоих примерах за единицу длины принят сантиметр, за единицу времени — секунда.
Решение. Чтобы определить уравнение траектории по уравнениям движения, перенесем во втором из заданных уравнений 3 влево, возведем оба уравнения в квадрат и, сложив, получим
Это уравнение окружности с центром в точке: x = 0, y = +3.
Чтобы получить закон движения, продифференцируем заданные уравнения: dx=—10 sin 2t dt, dy = 10 cos 2t dt.
Возводя в квадрат, складывая, извлекая квадратный корень и интегрируя, находим закон движения по траектории:
s=10t + C, где C = s0.
2) Исключим время из уравнений движения во втором примере:
Это уравнение первого порядка относительно х и у, следовательно, траектория-прямая линия. Прямая отсекает на положительных направлениях осей координат отрезки по 21,2 см. Однако не вся прямая служит траекторией точки: из заданных уравнений видно, что х и у должны быть всегда положительны и не могут быть больше 21,2 см каждый, поэтому траекторией точки является лишь отрезок прямой x+y = 21,2, лежащей в первом квадранте (рис. 85).
Рис. 85
На этом примере мы видим, что траекторией точки иногда является лишь часть линии, выражаемой уравнением траектории.
Продифференцируем уравнения движения:
dx = 21,2 ∙ 2 sin t cos t dt,
dy = 21,2 ∙ 2 sin t cos t dt.
Теперь no формуле (60) нетрудно найти элемент дуги траектории:
ля получения уравнения (51) движения точки по траектории остается лишь проинтегрировать найденное выражение. Интегрируем и подставляем начальные условия (при t= 0, s0 = 0):
Ответ. Уравнения траекторий x 2 +(y-3) 2 = 25 и x+y=21,2; уравнения движения по траектории s=10t+s0 и s = 30 sin 2 t.
Задача №2
Движение точки задано уравнениями:
х = x’ cos φ (t)—y’ sin φ (t),
y = x’ sin φ (t) + y’ cos φ (t),
где х’ и у’ — некоторые постоянные величины, a φ(t)— любая функция времени. Определить траекторию точки.
Решение. Возведем каждое из уравнений в квадрат, а затем сложим их:
x 2 + y 2 = χ ‘2 + y ‘2 .
По условию, х’ и у’ — постоянные. Обозначая сумму их квадратов через r 2 , получим
Ответ. Окружность с центром в начале координат радиуса .
Задача №3
Поезд длиной l м сначала идет по горизонтальному пути (рис. 86, а), а потом поднимается в гору под углом 2α к горизонту. Считая поезд однородной лентой, найти траекторию его центра тяжести.
Рис. 86
Решение. Для решения задачи нужно определить координаты центра тяжести поезда, найти уравнения движения центра тяжести и исключить из них время.
Направим оси координат по внутренней и внешней равиоделяшнм угла 2α (рис. 86, б). Траектория центра тяжести поезда не зависит от скорости поезда. Для простоты подсчетов предположим, что он идет равномерно со скоростью υ м/сек и в начальное мгновение t=0 подошел к горе.
Тогда за время t сек на гору поднимется υt м состава поезда и останется на горизонтальном пути l — υt м. Будем считать, что единица длины поезда весит γ.
Применяя формулы (48), найдем координаты центра тяжести поезда:
Координаты центра тяжести представлены здесь как функции времени, следовательно, полученные соотношения являются уравнениями движения центра тяжести поезда. Определяя t (или υt) из первого уравнения и подставляя во второе, найдем уравнение траектории:
Задача №4
Мостовой кран движется вдоль цеха согласно уравнению х = t; по крану катится в поперечном направлении тележка согласно уравнению у = 1,5t (х и у—в м, t — в сек). Цепь укорачивается со скоростью t>=0,5. Определить траекторию центра тяжести груза (в начальном положении центр тяжести груза находился в горизонтальной плоскости хОу, ось Oz направлена вертикально вверх).
Решение. В условии задачи даны лишь два уравнения движения и вертикальная скорость груза:
откуда dz = 0,5dt, и легко получаем третье уравнение:
z = 0,5t
Определив t из первого уравнения, подставим во второе и в третье:
y= 1,5x, z = 0,5x
Координаты груза должны удовлетворять одновременно обоим уравнениям, т. е. траектория лежит одновременно в обеих плоскостях и является линией их пересечения.
Ответ. Прямая.
Алгебраическая величина скорости проекции точки на координатную ось равна первой производной от текущей координаты по времени:
Алгебраическая величина скорости проекции точки на ось
Пусть движение точки M определяется тремя уравнениями:
x =x(t), (58′)
y = y(t), (58″)
z = z(t). (58″‘)
По мере движения точки M в пространстве ее проекции P, Q и R движутся по своим прямолинейным траекториям, т. е. по осям координат, и их движения вполне соответствуют движению точки М.
Так, координата (абсцисса) точки P всегда равна абсциссе точки М, а координаты точек QnR всегда равны ординате и аппликате точки М. Следовательно, при движении точки M в пространстве согласно уравнениям (58) точка P движется по оси Ox согласно уравнению (58′), а точки Q и R— соответственно по осям Oy и Oz согласно уравнениям (58″) и (58″‘).
Таким образом, движение точки M в пространстве можно разложить на три прямолинейных движения ее проекций P, Q и R.
Определим скорость υp точки P при движении этой точки по ее прямолинейной траектории Ох, иными словами, определим скорость проекции точки M на ось Ох.
Алгебраическая величина скорости выражается по формуле (53), причем дифференциалом расстояния точки P является дифференциал абсциссы х, а поэтому
(61)
Следовательно, алгебраическая величина скорости проекции P точки M на координатную ось равна первой производной от текущей координаты х по времени t. Она положительна, если точка P движется в положительном направлении оси Ох, и отрицательна, если точка P движется в отрицательном направлении.
Аналогично получаем алгебраические скорости проекций Q и R на ось Oy и на ось Oz:
(61″)
(61″‘)
Чтобы получить векторы скоростей проекций, надо умножить величины (61) на единичные векторы:
(61)
Алгебраическая величина скорости проекции точки на ось равна проекции скорости той же точки на туже ось:
Скорость проекции и проекция скорости
Пусть точка М за бесконечно малый отрезок времени dt передвинулась по своей траектории на элемент дуги ds, абсолютную величину которого выразим формулой (60):
где dx, dy и dz — проекции элемента дуги на оси координат, или, Что то же, элементарные приращения координат точки М.
На рис. 87 эти элементы условно изображены конечными отрезками. Как видно из чертежа, косинусы углов, составляемых элементарным перемещением (а следовательно, и скоростью точки), с осями х, у и z соответственно равны
(62)
Величина скорости точки M может быть определена по (53):
Чтобы определить проекцию скорости на какую-либо ось, надо умножить абсолютную величину скорости на косинус угла между направлением скорости и направлением этой оси. Таким образом, для проекций скорости точки M на оси координат имеем:
(63′)
(63″)
(63″‘)
Рис. 87
Равенства (63) словами нужно читать так: проекция скорости точки на ось равна алгебраической скорости проекции точки на ту же ось.
Задача №5
Доказать, что проекция скорости точки M (х, у, z) иа плоскость хОу равняется скорости , с которой движется по плоскости проекция M1 (х, у, О) точки M на ту же плоскость.
Решение. Скорость точки M составляет с осью Oz угол γυ, следовательно, угол, составляемый ею с плоскостью хОу, равен 90° — yυ п косинус этого угла равен sinγυ. Поэтому модуль проекции скорости точки M на плоскость хОу
Подводя под радикал и выражая cosγυ, по формуле (62), мы убедимся, что проекция скорости на плоскость равна по величине скорости проекции:
Направления векторов и тоже совпадают, так как направляющие косинусы их одинаковы. Теорема доказана.
Модуль скорости точки равен квадратному корню из суммы квадратов проекций скорости на оси координат:
Модуль скорости. Возведем в квадрат каждое из равенств:
(63)
Сумма квадратов направляющих косинусов равна единице и
(64)
Перед радикалом взят положительный знак, так как величина скорости (ее модуль) всегда положительна. В этом ее существенное отличие от алгебраической величины скорости (53), характеризующей скорость точки при движении по заданной траектории и имеющей знак « + » или «—» в зависимости от направления движения. Величину (64) иногда называют полной скоростью.
Направление скорости можно определить по направляющим косинусам скорости:
Направляющие косинусы скорости
Равенство (64) позволяет определить модуль скорости точки, движение которой задано уравнениями (58). Направление скорости определяется по косинусам углов, составляемых положительными направлениями осей координат с направлением скорости. Значения этих косинусов, называемых направляющими косинусами скорости, мы получим из уравнений (63):
(62′)
где , и — производные от х, у и z по t.
Если точка движется в плоскости хОу, то γυ = 90 o , cosγυ = 0 и cos αυ = sin βυ.
Задача №6
Уравнения движения суть
Определить траекторию и скорость.
Решение. Из уравнений движения следует, что х и у всегда больше нуля.
Для определения уравнения траектории возведем каждое из уравнений движения в квадрат и составим разность
x 2 — у 2 = a 2
Для определения скорости найдем сначала ее проекции:
а затем уже и полную скорость.
Ответ. Траектория — ветвь гиперболы x 2 — у 2 = a 2 — расположена в области положительных значений х; скорость .
Задача №7
Движение точки задано уравнениями
причем ось Ox горизонтальна, ось Oy направлена по вертикали вверх, υ0, g и —величины постоянные. Найти траекторию точки, координаты наивысшего ее положения, проекции скорости на координатные оси в тот момент, когда точка находится на оси Ох.
Решение. Уравнения описывают движение тела, брошенного со скоростью υ0 под углом α0 к горизонту (к оси Ох).
Чтобы найти уравнение траектории, определим время из первого уравнения и подставим найденное значение во второе; получим
уравнение параболы, проходящей через начало координат (рис. 88).
Рис. 88
Чтобы определить координаты наивысшего положения, мы можем применить известные из дифференциального исчисления правила нахождения максимума функции, т. е. взять производную , приравняв ее нулю, определить значение х и, подставив его в уравнение траектории, определить соответствующее значение у, убедившись при этом, что вторая производная . Однако мы найдем координаты наивысшего положения точки другим методом, для чего, продифференцировав по времени уравнения движения точки, найдем проекции ее скорости:
Первое из этих уравнений показывает, что проекция скорости на горизонтальную ось постоянна и равна проекции начальной скорости.
Исследование второго уравнения убеждает, что проекция скорости на вертикальную ось в начальное мгновение положительна и равна υ0 sin α0; затем, по мере увеличения t, проекция υy уменьшается, оставаясь положительной до мгновения , когда υy обращается в нуль, после чего υy становится отрицательной, возрастая по абсолютной величине с течением времени t.
Таким образом, точка движется вправо, сначала поднимаясь, затем опускаясь. Мгновение , при котором точка кончила подниматься, но еще не начала опускаться, соответствует максимальному подъему точки. В это мгновение скорость горизонтальна и . Подставляя найденное значение t в уравнения движения, найдем координаты наивысшей точки траектории:
Определим проекции скорости в мгновение, когда точка находится на оси Ох. В это мгновение ордината точки равна нулю. Приравняем пулю второе из уравнений движения:
Точка находится на оси Ox два раза: при t=0 при
Первое значение t соответствует началу движения, второе —падению точки на ось Ох. Второе значение равно времени всего полета, и оно вдвое больше полученного нами ранее времени наивысшего подъема: время падения равно времени подъема.
Подставляя значение t=0 в уравнения, определяющие проекции скорости, найдем проекции скорости в начальное мгновение:
Подставляя второе из найденных значений t, найдем скорости в момент падения:
Ответ: 1) Парабола
2)
3) υx = υ0 cos α0, υy = υ0 sin α0.
причем верхний знак соответствует началу движения, а нижний—концу.
Задача №8
По осям координат (рис. 89) скользят две муфты A и B, соединенные стержнем AB длиной l. Скорость В равна υB.
При каком положении муфт скорость муфты А вдвое больше υB?
Решение. Координата точки А связана с координатой точки В соотношением
Считая х и у функциями времени и продифференцировав это равенство по времени, найдем зависимость между скоростями обеих точек:
Но и по условию надо, чтобы величина была равна 2υB, т. е.
откуда после алгебраических преобразований получаем ответ.
Ответ: (см. задачи № 57 и 89, где даны другие решения).
Проекция ускорения точки на координатную ось равна первой производной по времени от проекции скорости на ту же ось или второй производной от текущей координаты по времени:
Ускорение проекции и проекция ускорения
Ускорение характеризует изменение скорости точки в данное мгновение. Оно выражается пределом отношения изменения вектора скорости к соответствующему промежутку времени при стремлении этого промежутка времени к нулю.
Для того чтобы определить ускорение точки M при ее движении в пространстве, рассмотрим сначала движение по оси Ox точки Р, являющейся проекцией точки M на эту ось.
Пусть в некоторое мгновение t алгебраическая величина скорости точки P была υх, а в мгновение tl = t + Δt стала υx+∆υx. Тогда ускорение точки P по величине и по знаку выразится пределом
Если знаки υx и ap одинаковы, то движение точки P ускоренное, а если различны, то замедленное.
Аналогично выразятся ускорения проекций Q и R точки M на другие координатные оси:
Проекции υx, υy и υz сами являются производными по времени от координат точки, поэтому ускорения проекций можно выразить вторыми производными по времени от координат точки. Эти равенства характеризуют не только величины, но и знаки ускорений проекций. Иными словами, они выражают изменение алгебраических скоростей проекций P, Q и R в мгновение t.
Только что доказанная теорема о равенстве алгебраической скорости проекции точки на ось и проекции скорости той же точки на ту же ось справедлива для любого момента времени. Следовательно, эта теорема относится не только к скорости, но и к ее изменению в любое мгновение, т. е. к ускорению. Это значит, что написанные выше равенства выражают также проекции ax, ау и аz ускорения а точки M на оси координат Ox, Oy и Oz:
(65)
где cosαa, cosβa и cosγa—направляющие косинусы ускорения.
Можно рассматривать эти величины (65) как векторы, направленные по осям координат:
(65′)
Модуль ускорения точки равен квадратному корню из суммы квадратов проекций ускорения на оси координат:
Величина ускорения при координатном способе задания движения точки
Возведем в квадрат каждое из равенств:
и затем сложим их:
(66)
Перед радикалом взят знак плюс, так как модуль вектора—величина положительная. Ускорение точки в отличие от проекций ускорения на оси координат или на другие направления обычно называют полным ускорением. Поэтому равенство (66) можно прочитать так: величина полного ускорения точки равна квадратному корню из суммы квадратов его проекций на оси координат.
Направление ускорения можно определить по направляющим косинусам ускорения:
,
Направляющие косинусы ускорения
Направление ускорения определяют по косинусам углов, составляемых положительными направлениями осей координат с вектором ускорения. Формулы направляющих косинусов получаем из уравнений (65):
(67′)
(67»)
(67»’)
Для определения направления ускорения в каждом конкретном случае надо сначала найти ускорение проекций по (65), для чего необходимо дважды продифференцировать уравнения движения (58), затем найти величину ускорения по (66), а потом определить направляющие косинусы ускорения по (67).
Направление ускорения обычно не совпадает с направлением скорости, и направляющие косинусы (67) ускорения только при прямолинейном ускоренном движении точки постоянно равны направляющим косинусам (62) скорости.
Если точка движется в плоскости хОу, то γa = 90 o , cosγa = 0, cosα0 = sin βa.
Задача №9
Точка M движется в системе координат хОу согласно уравнениям х= r cos πt, y=r sinπt, где х и у—в см, a t — в сек. Найти уравнение траектории точки М, ее скорость, направляющие косинусы скорости, ускорение, направляющие косинусы ускорения. Для значений времени t=0; 0,25; 0,5; 0,75, . 2 сек дать чертежи положений точки M, вектора скорости и вектора ускорения.
Решение. Из уравнения движения видно, что координаты точки M являются проекциями на соответствующие оси радиуса-вектора r, составляющего с осью абсцисс угол πt:
Для определения траектории точки исключаем время из уравнений движения. Получаем уравнение окружности
x 2 + y 2 = r 2
Найдем теперь проекции скорости на оси координат, для чего продифференцируем по времени уравнения движения:
откуда по (64) получаем модуль скорости
Величина скорости точки M постоянна.
Направляющие косинусы скорости определим по формуле (62′):
Эти соотношения показывают, что направление скорости непрерывно меняется и что скорость перпендикулярна радиусу-вектору, проведенному из центра О в точку М.
Ускорение точки M найдем по его проекциям, для чего продифференцируем выражения, полученные для проекций скорости:
откуда по (66) получаем величину ускорения
Ускорение характеризует быстроту изменения вектора скорости не только по величине, но и по направлению, поэтому, несмотря на постоянство модуля скорости точки М, ускорение этой точки не равно нулю. Как видно из полученного
Рис. 90
равенства, величина полного ускорения постоянна. Направление ускорения определим по направляющим косинусам согласно (67):
Направление ускорения точки M противоположно направлению радиуса-вектора.
Положения точки M в различные мгновения показаны на рис. 90, а, векторы скорости — на рис. 90,6 и векторы ускорения — на рис. 90, в.
Ответ. Точка M движется по окружности радиуса r против часовой стрелки с постоянной по величине скоростью υ = rπ и с постоянным по величине ускорением a = rπ 2 .
Задача №10
Снаряд выбрасывается из орудия с начальной скоростью υ=1600 м/сек под утлом α0 = 55 o к горизонту. Определить теоретическую дальность и высоту обстрела, учитывая, что ускорение свободно падающих тел g = 9,81 м/сек 2 .
Решение. Сначала составим уравнения движения снаряда в координатной форме, направив оси, как показано на чертеже (см. рис. 88), для этого определим проекции ускорения:
Разделив переменные, интегрируем:
υх= С1, υy = — gt + С2
Подставляя вместо переменных величин их начальные значения, увидим, что C1 и C2 равны проекциям начальной скорости:
1600 cos 55 o = C1, 1600 sin 55 o = — gt + C2.
Подставим их в уравнения, полученные для проекций скорости:
Разделяя переменные и интегрируя, найдем
При t = 0 координаты снаряда были: х =0, у = 0. Подставляя эти данные, найдем, что C3 = O и C4 = O. Значения cos 55° и sin 55° найдем в тригонометрических таблицах. Уравнения движения снаряда примут вид:
Далее поступим, как при решении задачи № 42: приравняв вертикальную скорость нулю, найдем время подъема снаряда (t= 133,7 сек); подставляя это значение t в уравнение движения по оси Оу, найдем теоретическую высоту обстрела (h = 87 636 м); удваивая время /, найдем время полета снаряда (t = 267,4 сек); подставляя это значение- в уравнение движения по оси Ох, найдем теоретическую дальность обстрела (l = 245 393 м).
Ответ. l = 245 км; h = 87,5κм.
| Рекомендую подробно изучить предмет: |
|
| Ещё лекции с примерами решения и объяснением: |
- Касательное и нормальное ускорения точки
- Основные законы динамики
- Колебания материальной точки
- Количество движения
- Пара сил в теоретической механике
- Приведение системы сил к данной точке
- Система сил на плоскости
- Естественный и векторный способы определения движения точки
При копировании любых материалов с сайта evkova.org обязательна активная ссылка на сайт www.evkova.org
Сайт создан коллективом преподавателей на некоммерческой основе для дополнительного образования молодежи
Сайт пишется, поддерживается и управляется коллективом преподавателей
Whatsapp и логотип whatsapp являются товарными знаками корпорации WhatsApp LLC.
Cайт носит информационный характер и ни при каких условиях не является публичной офертой, которая определяется положениями статьи 437 Гражданского кодекса РФ. Анна Евкова не оказывает никаких услуг.
http://ssopromat.ru/statika/kak-sostavit-uravnenie-proektsiy/
http://www.evkova.org/koordinatnyij-sposob-opredeleniya-dvizheniya-tochki-v-teoreticheskoj-mehanike
Проекция вектора. Координатные оси. Проекция точки. Координаты точки на ось
Вначале вспомним, что такое координатная ось, проекция точки на ось и координаты точки на оси.
Координатная ось – это прямая, которой придается какое–то направление. Можете считать, что это вектор с бесконечно большим модулем.
Координатная ось обозначается какой-либо буквой: X , Y , Z , s , t … Обычно на оси выбирается (произвольно) точка, которая называется началом отсчета и, как правило, обозначается буквой О. От этой точки отсчитываются расстояния до других интересующих нас точек.
Проекция точки на ось — это основание перпендикуляра, опущенного из этой точки на данную ось (рис. 8). То есть, проекцией точки на ось является точка.

Рис. 8
Координата точки на ось — это число, абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между началом оси и проекцией точки на эту ось. Это число берется со знаком плюс, если проекция точки располагается в направлении оси от ее начала и со знаком минус, если в противоположном направлении.
Скалярная проекция вектора на ось — это число, абсолютная величина которого равна длине отрезка оси (в выбранном масштабе), заключённого между проекциями точки начала и точки конца вектора. Важно! Обычно вместо выражения скалярная проекция вектора на ось говорят просто – проекция вектора на ось, то есть слово скалярная опускают. Проекция вектора обозначается той же буквой, что и проектируемый вектор (в обычном, нежирном написании), с нижним (как правило) индексом названия оси, на которую этот вектор проектируется. Например, если на ось Х проектируется вектор а, то его проекция обозначается аx. При проектировании этого же вектора на другую ось, скажем, ось Y , его проекция будет обозначаться аy (рис. 9).

Рис. 9
Чтобы вычислить проекцию вектора на ось (например, ось X) надо из координаты точки его конца вычесть координату точки начала, то есть
аx = хк − xн.
Надо помнить: скалярная проекция вектора на ось (или, просто, проекция вектора на ось) — это число (не вектор)! Причем, проекция может быть положительной, если величина хк больше величины хн, отрицательной, если величина хк меньше величины хн и равной нулю, если хк равно хн (рис. 10).

Рис. 10
Проекцию вектора на ось можно также найти, зная модуль вектора и угол, который он составляет с этой осью.
Из рисунка 11 видно, что аx = а Cos α
то есть, проекция вектора на ось равна произведению модуля вектора на косинус угла между направлением оси и направлением вектора. Если угол острый, то Cos α > 0 и аx > 0, а, если тупой, то косинус тупого угла отрицателен, и проекция вектора на ось тоже будет отрицательна.

Рис. 11
Углы, отсчитываемые от оси против хода часовой стрелки, принято считать положительными, а по ходу — отрицательными. Однако, поскольку косинус – функция четная, то есть, Cos α = Cos (− α), то при вычислении проекций углы можно отсчитывать как по ходу часовой стрелки, так и против.
При решении задач часто будут использоваться следующие свойства проекций: если
а = b + c +…+ d , то аx = bx + cx +…+ dx (аналогично на другие оси),
если
a = mb, то аx = mbx (аналогично на другие оси).
Формула аx = а Cos α будет очень часто встречаться при решении задач, поэтому ее обязательно надо знать. Правило определения проекции надо знать наизусть!
Запомните!
Чтобы найти проекцию вектора на ось надо модуль этого вектора умножить на косинус угла между направлением оси и направлением вектора.
Еще раз — НАИЗУСТЬ!
Пожалуйста, не забудьте поделиться о прочитанном со своими друзьями в соц. сетях (см. кнопки ниже).